Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica
Uma Proposta de um Controlador Adaptativo por
Posicionamento de P´
olos e Estrutura Vari´
avel
Francisco das Chagas da Silva J´
unior
Orientador: Prof. Dr. Aldayr Dantas de Ara´
ujo
Uma Proposta de um Controlador Adaptativo por
Posicionamento de P´
olos e Estrutura Vari´
avel
Francisco das Chagas da Silva J´
unior
Disserta¸c˜ao submetida ao Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica da Uni-versidade Federal do Rio Grande do Norte como parte dos requisitos para a obten¸c˜ao do grau de Mestre em Ciˆencias.
Orientador: Prof. Dr. Aldayr Dantas de Ara´ujo
Ao meu pai - Francisco Chagas `
A minha m˜ae - Iˆeda Maria Ao meu irm˜ao - Rodrigo M´arcio
Ao meu pai - Francisco Chagas `
A minha m˜ae - Iˆeda Maria Ao meu irm˜ao - Rodrigo M´arcio
Ao meu pai - Francisco Chagas `
A minha m˜ae - Iˆeda Maria Ao meu irm˜ao - Rodrigo M´arcio
Ao meu pai - Francisco Chagas `
A minha m˜ae - Iˆeda Maria Ao meu irm˜ao - Rodrigo M´arcio
Ao meu pai - Francisco Chagas `
A minha m˜ae - Iˆeda Maria Ao meu irm˜ao - Rodrigo M´arcio
A Deus pelo dom da vida e pela conquista de mais esta vit´oria.
Ao Professor Aldayr Dantas de Ara´ujo, pelo incentivo e pela sua brilhante orienta¸c˜ao acadˆemica.
A todos os meus familiares, que puderam me dar for¸ca e tranq¨uilidade para chegar at´e aqui.
Aos amigos Josenalde, Pl´ınio, Maximiliano, Liviane, Marcos, Andr´e, Iuri e Rosciano que me ajudaram sempre que precisei nas tarefas do laborat´orio, necess´arias para a cons-tru¸c˜ao deste trabalho.
A todos os professores do DCA e do DEE que me transmitiram seus conhecimentos e experiˆencias profissionais durante este per´ıodo.
A todos os funcion´arios da UFRN, que direta ou indiretamente, colaboraram para a realiza¸c˜ao deste trabalho.
Finalmente, a todos que, de alguma forma, contribu´ıram com este trabalho, mas que aqui n˜ao foram citados.
Lista de Figuras vi
Lista de Tabelas vii
Resumo viii
Abstract ix
Gloss´ario de Termos x
1 Introdu¸c˜ao 1
1.1 Controle Adaptativo . . . 1
1.1.1 Defini¸c˜ao . . . 1
1.1.2 Controle Adaptativo Direto e Indireto . . . 2
1.1.3 Escalonamento de Ganhos . . . 5
1.1.4 Controle Adaptativo por Modelo de Referˆencia . . . 6
1.1.5 Controle Adaptativo por Posicionamento de P´olos . . . 7
1.2 Sistemas com Estrutura Vari´avel . . . 9
1.3 Controle Adaptativo por Posicionamento de P´olos e Estrutura Vari´avel . . 9
1.4 Estrutura do Trabalho . . . 10
2 Controle Adaptativo por Posicionamento de P´olos 11 2.1 Introdu¸c˜ao . . . 11
2.2 PPC: Parˆametros da Planta Conhecidos . . . 12
2.2.1 Descri¸c˜ao do Problema . . . 13
2.2.2 M´etodo Polinomial . . . 13
3.3 Controle Equivalente . . . 20
3.4 Solu¸c˜ao de Filippov . . . 21
4 Controle Adaptativo por Posicionamento de P´olos e Estrutura Vari´avel 23 4.1 Introdu¸c˜ao . . . 23
4.2 Descri¸c˜ao do M´etodo . . . 24
4.3 Prova de Estabilidade . . . 25
4.4 C´alculo dos Parˆametros do Controlador . . . 26
5 Aplica¸c˜ao do Controlador 29 5.1 Planta de Primeira Ordem Inst´avel . . . 29
5.1.1 Simula¸c˜oes . . . 29
5.2 Motor de Indu¸c˜ao Trif´asico . . . 32
5.2.1 Modelagem . . . 32
5.2.2 Parˆametros do Motor de Indu¸c˜ao . . . 35
5.2.3 Simula¸c˜oes . . . 36
5.2.4 Sistema de Acionamento . . . 39
5.2.5 Implementa¸c˜ao Pr´atica . . . 40
6 Conclus˜oes e Perspectivas 42 A Modelos Entrada/Sa´ıda 43 A.1 Fun¸c˜oes de Transferˆencia . . . 43
A.2 Polinˆomios Coprimos . . . 43
B Conceitos Sobre Estabilidade 46 B.1 Defini¸c˜ao de Estabilidade . . . 46
B.2 M´etodo Direto de Lyapunov . . . 47
B.2.1 Fun¸c˜oes Definidas Positivas e Negativas . . . 47
B.2.2 Transla¸c˜ao da Origem do Sistema de Coordenadas . . . 48
1.1 Esquema de um controlador adaptativo. . . 2
1.2 Diagrama de blocos para controle adaptativo indireto. . . 3
1.3 Diagrama de blocos para controle adaptativo direto. . . 4
1.4 Escalonamento de ganhos. . . 5
1.5 Controle por Modelo de Referˆencia. . . 6
1.6 MRAC Indireto. . . 7
1.7 MRAC Direto. . . 8
2.1 Diagrama de blocos do PPC. . . 15
2.2 Uma realiza¸c˜ao alternativa do PPC. . . 16
3.1 Superf´ıcie de deslizamento em um sistema de estrutura vari´avel. . . 18
3.2 Filtro passa-baixa para obten¸c˜ao deueq. . . 20
3.3 Campo vetorial no modo deslizante (solu¸c˜ao de Filippov) . . . 21
4.1 Diagrama de blocos do VS-APPC para planta de primeira ordem. . . 28
5.1 APPC Indireto utilizando o m´etodo do gradiente. . . 30
5.2 VS-APPC Indireto para sistema de primeira ordem. . . 31
5.3 Comportamento dos parˆametros da planta utilizando leis chaveadas. . . 31
5.4 Diagrama vetorial do motor de indu¸c˜ao (ωs ´e a velocidade s´ıncrona.) . . . . 34
5.5 VS-APPC para o controle de velocidade de um motor de indu¸c˜ao trif´asico. 37 5.6 Altera¸c˜ao dos parˆametros da planta. . . 38
5.7 Perturba¸c˜oes no sistema e altera¸c˜oes no sinal de referˆencia do sistema. . . . 38
5.8 Sistema de acionamento. . . 40
5.9 Implementa¸c˜ao pr´atica do VS-APPC. . . 41
5.1 Parˆametros el´etricos do motor . . . 35 5.2 Caracter´ıstica tens˜ao x velocidade do tacogerador . . . 39
Existem dois m´etodos principais para a constru¸c˜ao de controladores adaptativos. Um deles ´e o controle adaptativo por modelo de referˆencia (MRAC) e o outro ´e o controle adaptativo por posicionamento de p´olos (APPC). No MRAC, um modelo de referˆencia ´e escolhido para gerar a trajet´oria desejada que o sinal de sa´ıda da planta deve seguir, e ele pode requerer o cancelamento de zeros da planta. Devido a sua flexibilidade em escolher a metodologia de projeto do controlador (realimenta¸c˜ao de estado, projeto de compensador, linear quadr´atico, etc.) e a lei adaptativa (m´ınimos quadrados, m´etodo do gradiente, etc.), o APPC ´e o tipo mais geral de controle adaptativo. Tradicionalmente, vem sendo desenvolvido em uma abordagem indireta e, como uma vantagem, pode ser aplicado a plantas de fase n˜ao-m´ınima, j´a que n˜ao envolve cancelamentos de zeros e p´olos. A integra¸c˜ao aos sistemas com estrutura vari´avel permite agregar rapidez no transit´orio e robustez `as varia¸c˜oes param´etricas e perturba¸c˜oes.
O objetivo deste trabalho ´e desenvolver um controlador adaptativo por posiciona-mento de p´olos e estrutura vari´avel (VS-APPC). Portanto, s˜ao propostas leis chaveadas em substitui¸c˜ao `as leis adaptativas integrais tradicionais. Adicionalmente, s˜ao apresen-tadas simula¸c˜oes para uma planta de primeira ordem inst´avel, assim como simula¸c˜oes e resultados pr´aticos da aplica¸c˜ao da t´ecnica proposta a um motor de indu¸c˜ao trif´asico.
There are two main approaches for using in adaptive controllers. One is the so-called model reference adaptive control (MRAC), and the other is the so-so-called adaptive pole placement control (APPC). In MRAC, a reference model is chosen to generate the desired trajectory that the plant output has to follow, and it can require cancellation of the plant zeros. Due to its flexibility in choosing the controller design methodology (state feedback, compensator design, linear quadratic, etc.) and the adaptive law (least squares, gradient, etc.), the APPC is the most general type of adaptive control. Traditionally, it has been developed in an indirect approach and, as an advantage, it may be applied to non-minimum phase plants, because do not involve plant zero-pole cancellations. The integration to variable structure systems allows to aggregate fast transient and robustness to parametric uncertainties and disturbances, as well.
In this work, a variable structure adaptive pole placement control (VS-APPC) is pro-posed. Therefore, new switching laws are proposed, instead of using the traditional inte-gral adaptive laws. Additionally, simulation results for an unstable first order system and simulation and practical results for a three-phase induction motor are shown.
APPC - Adaptive Pole Placement Control (Controle Adaptativo por Posicionamento de P´olos)
LTI - Linear Time Invariant (Linear e Invariante no Tempo)
MRAC - Model Reference Adaptive Control (Controle Adaptativo por Modelo de Referˆencia)
MRC - Model Reference Control (Controle por Modelo de Referˆencia)
PPC - Pole Placement Control (Controle Adaptativo por Posicionamento de P´olos) SISO - Single Input Single Output (Monovari´avel)
VSC - Variable Structure Control (Controle por Estrutura Vari´avel)
VS-APPC - Variable Structure Adaptive Pole Placement Control (Controle Adapta-tivo por Posicionamento de P´olos e Estrutura Vari´avel)
VS-MRAC - Variable Structure Model Reference Adaptive Control (Controle Adap-tativo por Modelo de Referˆencia e Estrutura Vari´avel)
Introdu¸c˜
ao
1.1
Controle Adaptativo
A maioria das t´ecnicas para projeto de sistemas de controle s˜ao baseadas em um bom entendimento da planta em estudo e seu meio. Entretanto, em muitos casos, a planta a ser controlada ´e muito complexa e os processos f´ısicos b´asicos nela presentes n˜ao s˜ao completamente entendidos, possuindo muitas vezes parˆametros incertos constantes ou variando lentamente. Por exemplo, robˆos manipuladores podem carregar objetos grandes com parˆametros inerciais desconhecidos. Sistemas de potˆencia podem ser submetidos a grandes varia¸c˜oes nas condi¸c˜oes de carga. Portanto, as t´ecnicas de projeto de controle precisam ser adicionadas de uma t´ecnica de estima¸c˜ao de parˆametros, visando obter pro-gressivamente um melhor entendimento da planta a ser controlada. ´E assim intuitivo agregar estima¸c˜ao de parˆametros e controle. Freq¨uentemente, os dois passos s˜ao feitos separadamente. Se a estima¸c˜ao de parˆametros ´e recursiva, isto ´e, o modelo da planta ´e periodicamente atualizado com base em estimativas anteriores e novos dados, estima¸c˜ao e controle podem ser executados concorrentemente [1]. O controle de modelos de plan-tas desconhecidas ou parcialmente conhecidas ´e objeto de estudo da ´area de sistemas de controle adaptativo.
1.1.1
Defini¸c˜
ao
A id´eia b´asica em controle adaptativo ´e estimar os parˆametros desconhecidos da planta (ou equivalentemente, os correspondentes parˆametros do controlador) em tempo real
✲
✲ ✲
✲ ✲
✛
❄
✛
controlador referˆencia
processo sa´ıda ajuste de
parˆametros parˆametros do
controlador
sinal de controle
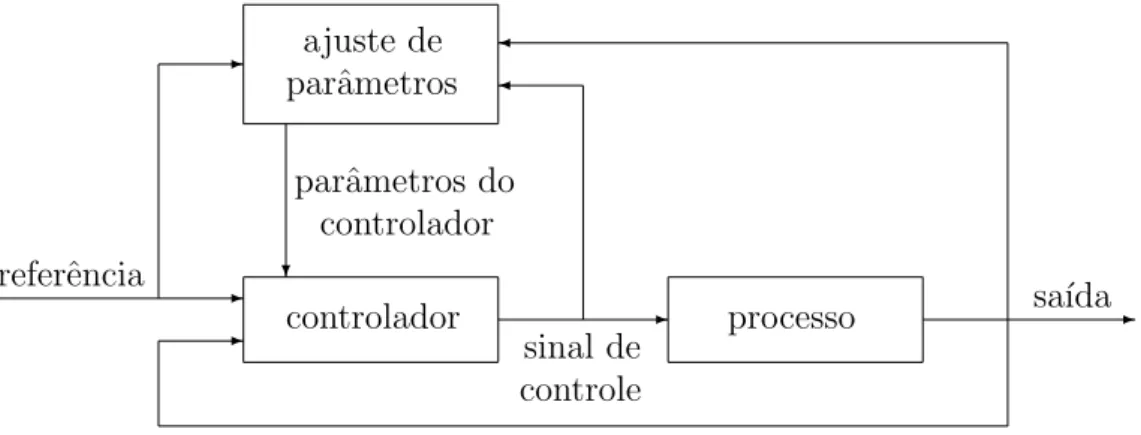
Figura 1.1: Esquema de um controlador adaptativo.
baseado nos sinais medidos do sistema, e usar os parˆametros estimados no c´alculo da lei de controle [2], tendo como objetivo alterar o comportamento do sistema de modo a ajust´a-lo a circunstˆancias novas ou modificadas. Um sistema de controle adaptativo pode ser considerado como um sistema de controle com estima¸c˜ao de parˆametros em tempo real.
Controle adaptativo consiste, portanto, em aplicar alguma t´ecnica de estima¸c˜ao para obter os parˆametros do modelo do processo e de seu meio a partir de medi¸c˜oes de entradas e sa´ıdas e usar este modelo para projetar um controlador [3]. Os parˆametros do controlador s˜ao ajustados durante a opera¸c˜ao da planta conforme a quantidade de dados dispon´ıveis. As t´ecnicas de projeto para sistemas adaptativos s˜ao estudadas e analisadas em teoria para plantas desconhecidas, mas fixas (isto ´e, invariantes no tempo). Na pr´atica, elas s˜ao aplicadas para plantas desconhecidas e lentamente variantes no tempo.
A estrutura do controlador consiste de uma malha de realimenta¸c˜ao e de um contro-lador com ganhos ajust´aveis, conforme mostra a Figura 1.1. A forma como s˜ao alterados os ganhos do controlador em resposta a mudan¸cas na planta e perturba¸c˜oes distingue um esquema de controle do outro.
1.1.2
Controle Adaptativo Direto e Indireto
✁✁ ✁✁✕ ❄ ❄ ✲ ✲ ✲ ✲ ✲ ✛ ✛ θc u
θ(t) Controlador Planta
C(θc)
Estimador de θ∗
r r
C´alculos
θc(t) =F(θ(t))
y P(θ∗
)
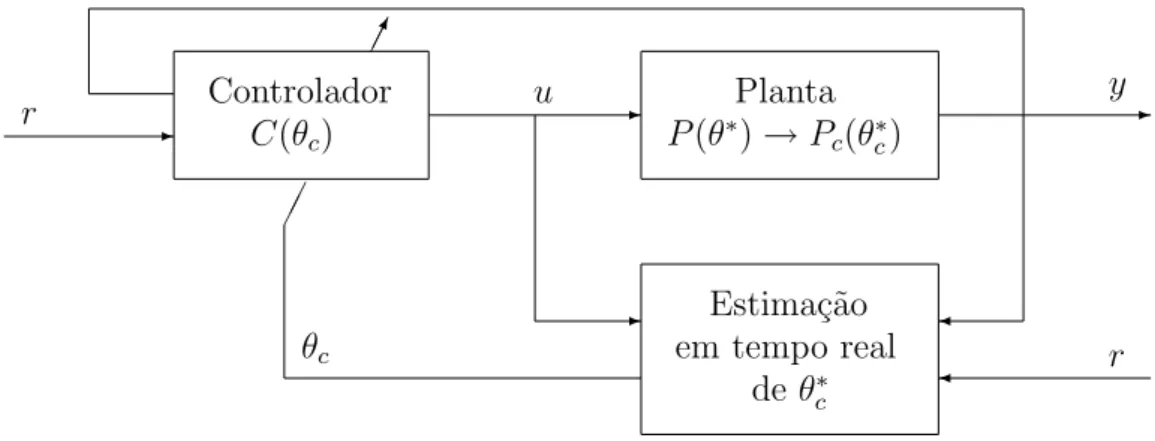
Figura 1.2: Diagrama de blocos para controle adaptativo indireto.
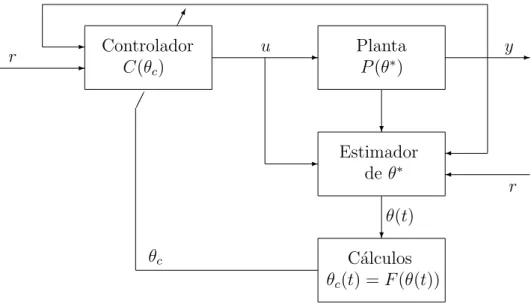
m´etodos. No primeiro m´etodo, conhecido como controle adaptativo direto, o modelo da planta ´e parametrizado em fun¸c˜ao dos parˆametros do controlador, os quais s˜ao es-timados diretamente, sem c´alculos intermedi´arios envolvendo estimativas de parˆametros da planta. No segundo m´etodo, conhecido como controle adaptativo indireto, os parˆametros da planta s˜ao estimados a cada instante e utilizados para o c´alculo dos parˆametros do controlador.
No controle adaptativo indireto, o modelo da plantaP(θ∗
) ´e parametrizado em rela¸c˜ao a um vetor de parˆametros desconhecidos θ∗
. Um estimador em tempo real gera uma estimativaθ(t) deθ∗
a cada instantet, processando a entrada u e a sa´ıday. A estimativa dos parˆametrosθ(t) especifica um modelo estimado caracterizado por ˆP(θ(t)), que ´e usado para calcular os parˆametros do controlador ou vetor de ganhosθc(t) a cada instantet. Este
modelo, para o projeto do controlador, ´e tratado como o verdadeiro modelo da planta no instante t. Este princ´ıpio ´e conhecido como princ´ıpio de equivalˆencia `a certeza. As formas da lei de controle C(θc) e da equa¸c˜ao alg´ebrica θc =F(θ) s˜ao escolhidas como as
mesmas que seriam usadas para atender os requisitos de desempenho para o modeloP(θ∗
) se θ∗
fosse conhecido. ´E claro, neste m´etodo, que C(θc(t)) ´e projetada a cada instante t
de modo a satisfazer os requisitos de desempenho do modelo estimado ˆP(θ(t)), que pode ser diferente do modelo da planta desconhecida P(θ∗
). Assim, o principal problema no controle adaptativo indireto ´e escolher a classe de leis de controle C(θc) e a classe de
✲ ✁✁
✁✁✕
Estima¸c˜ao em tempo real
de θ∗
c
✲ ✲ Controlador
✛
✛ C(θc)
u Planta
P(θ∗
)→Pc(θc∗)
✲ y r
θc r
Figura 1.3: Diagrama de blocos para controle adaptativo direto.
de forma que C(θc(t)) atenda os requisitos de desempenho para o modelo P(θ∗) com
θ∗
desconhecido. A Figura 1.2 mostra o diagrama de blocos para o controle adaptativo indireto.
No controle adaptativo direto, o modelo da planta P(θ∗
) ´e parametrizado em fun¸c˜ao de um vetor de parˆametros desconhecido θ∗
c do controlador, com o qual C(θ
∗
c) atende
os requisitos de desempenho, para obter o modelo Pc(θ∗c) com exatamente as mesmas
caracter´ısticas entrada/sa´ıda de P(θ∗
).
O estimador de parˆametros em tempo real ´e projetado baseado emPc(θc∗) ao inv´es de
P(θ∗
) para prover estimativas diretas θc(t) de θ∗c em cada instante t atrav´es do
proces-samento da entrada u e da sa´ıda y da planta. A estimativa θc(t) ´e ent˜ao usada para
atualizar o vetor de parˆametros do controlador θc sem c´alculos intermedi´arios. A escolha
da classe de leis de controle C(θc) e os estimadores de parˆametros que geram θc(t), de
forma que C(θc(t)) atenda os requisitos de desempenho para o modelo P(θ∗) s˜ao os
prin-cipais problemas no controle adaptativo direto. As propriedades do modelo P(θ∗
) s˜ao fundamentais na obten¸c˜ao do modelo parametrizado Pc(θ∗c) que ´e conveniente para a
✲ ✲ r
✲
u y ✲
✛
Escalonador de ganhos
Controlador
C(θ) Planta
Medi¸c˜oes Auxiliares
✁ ✁ ✁ ✁ ✁
✁ ✁☛
θi
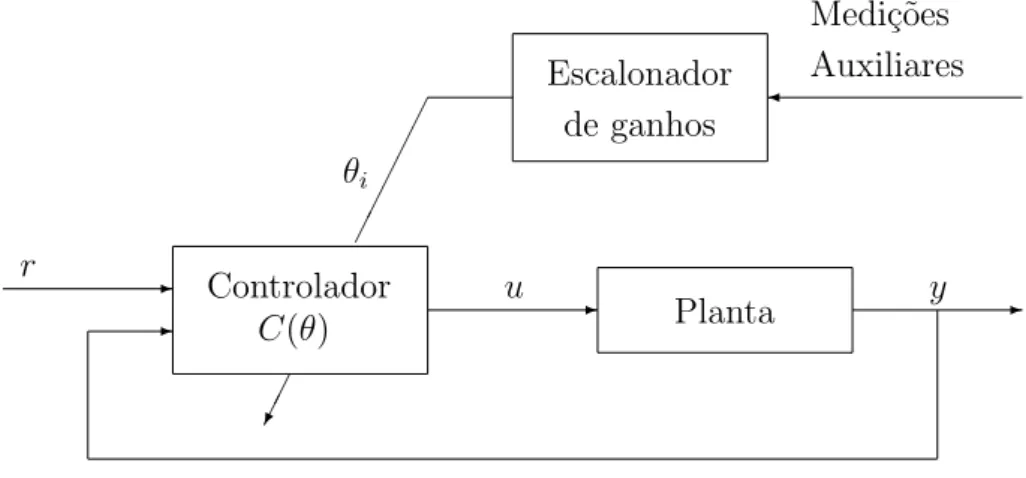
Figura 1.4: Escalonamento de ganhos.
1.1.3
Escalonamento de Ganhos
Em alguns sistemas existem vari´aveis auxiliares que descrevem bem as caracter´ısticas da dinˆamica do processo. Se estas vari´aveis podem ser medidas, elas podem ser usadas para mudar os parˆametros do controlador. Cada conjunto destas vari´aveis consiste num ponto de opera¸c˜ao do processo.
Vamos considerar um processo onde para cada ponto de opera¸c˜ao i, i = 1,2, ..., N, consistindo das vari´aveis citadas anteriormente, os parˆametros s˜ao conhecidos. Para um dado ponto de opera¸c˜ao i, um controlador por realimenta¸c˜ao com ganhos constantes, dito θi, pode ser projetado para encontrar os requisitos de desempenho para o modelo
linear correspondente. Isto leva a um controlador, ditoC(θ), com um conjunto de ganhos
θ1, θ2, ..., θn cobrindo os N pontos de opera¸c˜ao. Uma vez que um ponto de opera¸c˜ao i ´e
detectado, os ganhos do controlador podem ser mudados para o valor apropriado de θi,
obtido de um conjunto pr´e-calculado de ganhos. Esta abordagem ´e chamada escalona-mento de ganhos e ´e ilustrada na Figura 1.4.
A vantagem do escalonamento de ganhos ´e que os ganhos do controlador podem ser mudados t˜ao rapidamente quanto `as medidas auxiliares respondem para as mudan¸cas de parˆametros. Mudan¸cas r´apidas e freq¨uentes dos ganhos do controlador, entretanto, podem conduzir `a instabilidade. Por isso, existe um limite de acordo com a freq¨uˆencia e rapidez com que os ganhos do controlador podem ser mudados.
✲
✲
✲ ✲
✻
✒✑ ✓✏❄
✲ e0
Modelo de Referˆencia
M(s)
r
u
Controlador Planta
C(θ∗
c) G(s)
✲
−
+
y ym
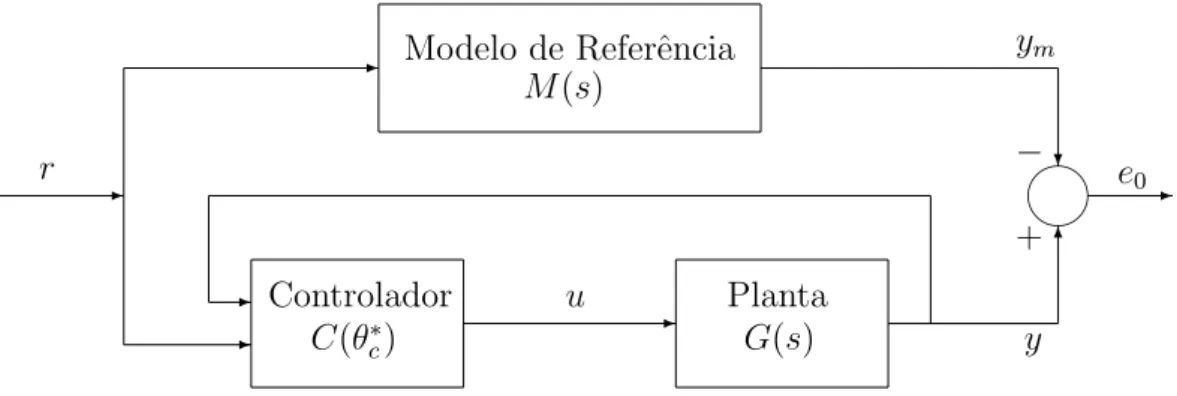
Figura 1.5: Controle por Modelo de Referˆencia.
Apesar de suas limita¸c˜oes, o escalonamento de ganhos ´e um m´etodo popular para lidar com varia¸c˜oes de parˆametros em diversas aplica¸c˜oes, como por exemplo, na avia¸c˜ao.
1.1.4
Controle Adaptativo por Modelo de Referˆ
encia
O controle adaptativo por modelo de referˆencia (MRAC) [4] ´e derivado do problema de acompanhamento de modelo ou problema de controle por modelo de referˆencia (MRC) e ´e uma das principais abordagens para controle adaptativo. No MRC, um bom en-tendimento da planta e dos requisitos de desempenho, possibilita ao projetista adotar um modelo, conhecido como modelo de referˆencia. Este modelo descreve as caracter´ısticas de entrada/sa´ıda desejadas para a planta em malha fechada. O objetivo do MRC ´e encontrar a lei de controle por realimenta¸c˜ao que altera a estrutura e a dinˆamica da planta de tal forma que as propriedades de entrada/sa´ıda sejam exatamente iguais `as do modelo de referˆencia. A desvantagem ´e que o processo de adapta¸c˜ao ao modelo, em geral, ´e lento e oscilat´orio. A estrutura para o esquema MRC para uma planta linear e invariante no tempo ´e mostrada na Figura 1.5.
A fun¸c˜ao de transferˆenciaM(s) do modelo de referˆencia ´e projetada de forma que para um dado sinal de referˆenciar(t) a sa´ıdaym(t) represente a sa´ıda desejaday(t) que a planta
deve seguir. O controlador por realimenta¸c˜ao C(θ∗
c) ´e projetado de forma que todos os
sinais sejam uniformemente limitados e a fun¸c˜ao de transferˆencia da planta de r para y
seja igual aM(s). Esta condi¸c˜ao garante que para qualquer sinal de referˆenciar(t), o erro de sa´ıda e0 =y−ym, que representa o desvio da sa´ıda da planta em rela¸c˜ao `a trajet´oria
desejada ym, tenda para zero com o tempo. A condi¸c˜ao de matching para a fun¸c˜ao de
substituindo-✁✁ ✁✁✕ ❄ ❄ ✲ ✲ ✲ ✲ ✲ ✒✑ ✓✏e 0 ✻ ❄ ✲ ✛ ✛ θc u
θ(t) Controlador Planta
C(θc)
Estimador de θ∗
r r
C´alculos
θc(t) =F(θ(t))
P(θ∗
) Modelo de Referˆencia
M(s)
−
+
y ym
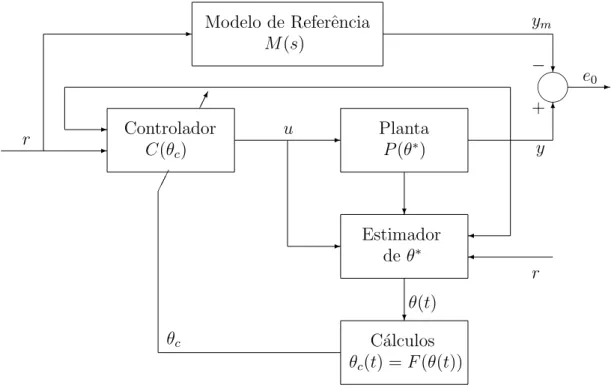
Figura 1.6: MRAC Indireto.
os pelos zeros de M(s) e tornando os p´olos do sistema em malha fechada iguais aos do modelo de referˆencia, atrav´es do controlador C(θ∗
c). O cancelamento dos zeros da planta
imp˜oe a restri¸c˜ao da planta ser de fase m´ınima, isto ´e, ter zeros no semiplano esquerdo. Se qualquer zero da planta estiver no semi-plano direito, seu cancelamento pode facilmente levar a sinais ilimitados, j´a que com zeros no semi-plano direito, visto que o cancelamento n˜ao ´e perfeito, o sistema pode se tornar inst´avel [4].
Quandoθ∗
´e desconhecido o esquema MRC da Figura 1.5 n˜ao pode ser implementado, pois θ∗
c n˜ao pode ser calculado, sendo assim desconhecido. Uma solu¸c˜ao ´e substituir θ
∗
c
desconhecido na lei de controle por sua estimativa θc(t) obtida usando o m´etodo direto
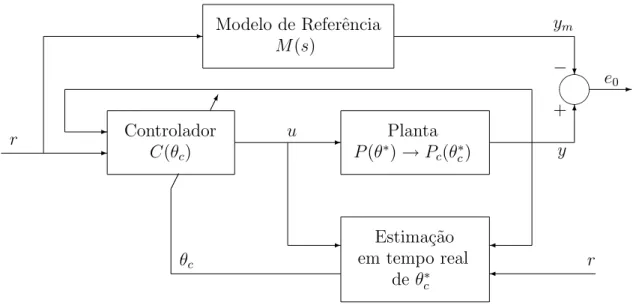
ou indireto. O esquema de controle resultante ´e conhecido como MRAC e pode ser classificado coo MRAC indireto na Figura 1.6 e MRAC direto na Figura 1.7.
1.1.5
Controle Adaptativo por Posicionamento de P´
olos
O controle adaptativo por posicionamento de p´olos (APPC) ´e derivado do controle por posicionamento de p´olos (PPC) e problemas de regula¸c˜ao usados no caso de plantas lineares invariantes no tempo (LTI) com parˆametros desconhecidos.
✲ Estima¸c˜ao em tempo real
deθ∗
c ✁✁ ✁✁✕ ✲ ✲ ✲ ❄ ✻ ✒✑ ✓✏ ✲ ✲ Controlador ✛ ✛ C(θc)
u Planta
P(θ∗
)→Pc(θc∗)
Modelo de Referˆencia
M(s)
r y ym r − + e0 θc
Figura 1.7: MRAC Direto.
dos p´olos de malha fechada. Uma lei de controle por realimenta¸c˜ao ´e ent˜ao desenvolvida alocando os p´olos de malha fechada nas posi¸c˜oes desejadas.
A estrutura do controlador C(θ∗
c) e o vetor de parˆametros θ
∗
c s˜ao escolhidos de forma
que os p´olos da fun¸c˜ao de transferˆencia da planta em malha fechada de r para y sejam iguais aos desejados. O vetor θ∗
c ´e geralmente calculado em fun¸c˜ao de θ
∗
, onde θ∗
´e um vetor com os coeficientes da fun¸c˜ao de transferˆencia G(s).
Se θ∗
´e conhecido, ent˜ao θ∗
c ´e calculado e usado na lei de controle. Quando θ
∗
´e desconhecido, θ∗
c ´e tamb´em desconhecido e o PPC n˜ao pode ser implementado. Nesse
caso, assim como no caso do MRC, n´os podemos usar o princ´ıpio de equivalˆencia `a certeza para substituir o vetor desconhecido θ∗
c por sua estimativaθc(t), ou seja, em linhas gerais,
os parˆametros do controlador s˜ao calculados das estimativas dos parˆametros da planta como se elas fossem os verdadeiros parˆametros. O esquema resultante ´e referido como APPC. Se θc(t) ´e atualizado diretamente usando um estimador de parˆametros em tempo
real, o esquema ´e referido como um APPC direto. Se θc(t) ´e calculado em fun¸c˜ao de
θ(t), que ´e uma estimativa para θ∗
1.2
Sistemas com Estrutura Vari´
avel
A teoria de sistemas com estrutura vari´avel tem sido bastante utilizada no tratamento de problemas de sistemas de controle, principalmente na forma conhecida como controle por modos deslizantes [5-11]. Neste m´etodo, as fun¸c˜oes de chaveamento das vari´aveis de controle devem ser projetadas de modo a restringir a dinˆamica do sistema a uma superf´ıcie chamada superf´ıcie deslizante.
Os sistemas com estrutura vari´avel tˆem como principais caracter´ısticas a rapidez do transit´orio e robustez a varia¸c˜oes param´etricas e perturba¸c˜oes, dentro de uma faixa de tolerˆancia estipulada no projeto. Em contrapartida, possuem alguns aspectos a considerar, como alto valor do sinal de controle inicial e chaveamento do sinal de controle em alta freq¨uˆencia, fenˆomeno chamadochattering.
Esta teoria teve origem no estudo dos controladores `a rel´e e baseia-se no chaveamento das vari´aveis de controle dentro de um conjunto de fun¸c˜oes das vari´aveis de estado da planta de acordo com uma dada regra, o que imp˜oe para este m´etodo o conhecimento de todas as vari´aveis de estado do sistema.
1.3
Controle Adaptativo por Posicionamento de P´
olos
e Estrutura Vari´
avel
Conforme foi visto nas Se¸c˜oes 1.1.4 e 1.1.5, as duas principais abordagens do controle adaptativo (MRAC e APPC) utilizam algoritmos de adapta¸c˜ao que, em geral, baseiam-se em uma lei do tipo integral [12]. O sistema resultante apresenta problemas bem conhecidos de estabilidade sob condi¸c˜oes n˜ao ideais como, por exemplo, na presen¸ca de dist´urbios externos [13,24], e um comportamento transit´orio inaceit´avel [14-15].
No caso do APPC, dentro do qual se insere este trabalho, diversos trabalhos tˆem sido publicados tratando de poss´ıveis solu¸c˜oes para o problema de robustez no que diz respeito a perturba¸c˜oes limitadas [16-17]; dinˆamica n˜ao-modelada [18-20]; e varia¸c˜oes param´etricas [17].
controlador, chamado VS-APPC (Controle Adaptativo por Posicionamento de P´olos e Estrutura Vari´avel) [21-23], que substitui as leis integrais do APPC por leis chaveadas.
1.4
Estrutura do Trabalho
Controle Adaptativo por
Posicionamento de P´
olos
2.1
Introdu¸c˜
ao
A suposi¸c˜ao de que a planta ´e de fase m´ınima, ou seja, tem zeros no semiplano esquerdo, ´e bastante restritiva em muitas aplica¸c˜oes. Por exemplo, a aproxima¸c˜ao de atrasos de tempo em processos qu´ımicos e outros processos industriais leva a modelos de planta com zeros no semiplano direito.
Uma classe de esquemas de controle muito popular no caso de parˆametros conhecidos ´e aquela que muda o posicionamento dos p´olos da planta e n˜ao envolve cancelamentos de zeros e p´olos. Estes esquemas (PPC) s˜ao aplic´aveis a plantas LTI de fase m´ınima e n˜ao m´ınima. A combina¸c˜ao de uma lei de controle por posicionamento de p´olos com um estimador de parˆametros ou uma lei adaptativa leva a um APPC e pode ser usado para controlar uma grande variedade de plantas LTI com parˆametros desconhecidos.
O APPC pode ser dividido em duas classes: APPC indireto, onde a lei de controle gera as estimativas dos coeficientes da planta em tempo real, que s˜ao usadas ent˜ao para calcular os parˆametros da lei de controle atrav´es da solu¸c˜ao de alguma equa¸c˜ao alg´ebrica; e o APPC direto, onde os parˆametros da lei de controle s˜ao gerados diretamente por uma lei adaptativa sem c´alculos intermedi´arios que envolvem estimativas dos parˆametros da planta.
O APPC direto ´e restrito a plantas monovari´aveis (SISO) e a uma classe especial
de plantas onde os parˆametros desejados do controle por aloca¸c˜ao de p´olos podem ser expressos na forma de um modelo param´etrico linear ou bilinear [25].
O APPC indireto, por outro lado, ´e f´acil de projetar e ´e aplic´avel a uma grande variedade de plantas LTI que n˜ao precisam ser de fase m´ınima ou est´avel. Devido a sua flexibilidade em escolher a metodologia do projeto do controlador (realimenta¸c˜ao de estado, projeto de compensador, linear quadr´atico, etc.) e lei adaptativa (m´ınimos quadrados, m´etodo do gradiente, etc.), o APPC indireto ´e o tipo mais geral de controle adaptativo. O controle APPC tamb´em ´e conhecido como self-tuning (auto-ajust´avel). Esta t´ecnica de controle tamb´em pode ser aplicada a alguns sistemas n˜ao lineares sem qualquer diferen¸ca conceitual [2].
Neste trabalho, ´e abordado o APPC indireto. O m´etodo escolhido para projetar a lei de controle ´e o m´etodo polinomial, que ser´a discutido na Se¸c˜ao 2.2.2.
2.2
PPC: Parˆ
ametros da Planta Conhecidos
Um esquema de controle adaptativo indireto consiste de trˆes partes: a lei adaptativa que provˆe estimativas em tempo real para os parˆametros da planta; o mapeamento entre os parˆametros da planta e do controlador que ´e usado para calcular os parˆametros do controlador a partir das estimativas em tempo real dos parˆametros da planta; e a lei de controle.
Diversas leis de controle podem ser desenvolvidas para alcan¸car o objetivo do PPC, como, por exemplo, o m´etodo por vari´aveis de estado, que usa um observador de estados e realimenta¸c˜ao por vari´aveis de estado, e o controle linear quadr´atico, que usa uma t´ecnica de otimiza¸c˜ao para projetar o sinal de controle que garante limita¸c˜ao e regula¸c˜ao do sinal de sa´ıda da planta ou erro de rastreamento nulo por minimizar uma certa fun¸c˜ao de custo que reflete o desempenho do sistema em malha fechada [25]. Neste trabalho ´e abordado o m´etodo polinomial.
2.2.1
Descri¸c˜
ao do Problema
Consideremos uma planta SISO e LTI
y=G(s)u, G(s) = Z(s)
R(s) (2.1)
onde G(s) ´e estritamente pr´opria (seu grau relativo, ou excesso de p´olos, ´e pelo menos 1) e R(s) ´e um polinˆomio mˆonico (o coeficiente da potˆencia mais alta em s´e 1). O objetivo de controle ´e escolher um sinal de entradaude forma que os p´olos de malha fechada sejam os p´olos do polinˆomio mˆonico Hurwitz (todas as ra´ızes com parte real negativa) A∗
(s). O polinˆomioA∗
(s) ´e referido como o polinˆomio caracter´ıstico de malha fechada desejado, e ´e escolhido baseado nos requisitos de desempenho de malha fechada. Para alcan¸car o objetivo de controle, ser˜ao feitas as seguintes suposi¸c˜oes sobre a planta:
S1. R(s) ´e um polinˆomio cujo grau n ´e conhecido.
S2. Z(s) e R(s) s˜ao coprimos e grau(Z)< n.
As suposi¸c˜oes S1 e S2 permitem que Z e R sejam n˜ao-Hurwitz em contraste ao caso do MRC onde Z deve ser Hurwitz. Em geral, pela atribui¸c˜ao dos p´olos de malha fechada aos p´olos deA∗
(s), n´os podemos garantir a estabilidade e convergˆencia da sa´ıda da planta
y para zero sem a utiliza¸c˜ao de uma entrada externa. N´os podemos estender o objetivo do PPC ao incluir o rastreamento, onde y ´e requerido seguir uma certa classe de sinais de referˆencia r, usando o princ´ıpio do modelo interno como segue: o sinal de referˆencia uniformemente limitado ´e assumido satisfazer:
Qm(s)r= 0 (2.2)
onde Qm(s) ´e o modelo interno de r, ou seja, ´e um polinˆomio mˆonico conhecido de grau
q com ra´ızes n˜ao repetidas no eixojω, exceto na origem, e que satisfaz
S3. Qm(s) e Z(s) s˜ao coprimos.
Por exemplo, sey´e requerido seguir o sinal de referˆenciar = 2+sen(2t), ent˜aoQm(s) =
s(s2+ 4) e, portanto, de acordo com (S3),Z(s) n˜ao deveria tersous2+ 4 como um fator.
2.2.2
M´
etodo Polinomial
Vamos considerar a lei de controle
onde P(s), L(s) e M(s) s˜ao polinˆomios (com L(s) mˆonico) de grau q +n−1, n−1 e
q+n−1, respectivamente, a serem calculados e Qm(s) satisfaz (2.2) e a suposi¸c˜ao S3.
Aplicando (2.3) `a planta (2.1), n´os obtemos a planta em malha fechada
y= Z(s)M(s)
QmL(s)R(s) +P(s)Z(s)
r (2.4)
cuja equa¸c˜ao caracter´ıstica
QmL(s)R(s) +P(s)Z(s) = 0 (2.5)
tem ordem 2n+q−1. O objetivo agora ´e escolher P eL, tal que
QmL(s)R(s) +P(s)Z(s) =A
∗
(s) (2.6)
seja satisfeita por um polinˆomio Hurwitz mˆonico A∗
(s) de grau 2n+q−1. Devido `as suposi¸c˜oes S2 e S3 garantirem que Qm,R,Z s˜ao coprimos, existe solu¸c˜ao para queL eP
satisfa¸cam (2.6) e esta solu¸c˜ao ´e ´unica. A solu¸c˜ao para os coeficientes de L(s), P(s) da equa¸c˜ao (2.6) pode ser obtida pela resolu¸c˜ao da equa¸c˜ao alg´ebrica
Slβl=α
∗
l (2.7)
onde Sl ´e a matriz de Sylvester de QmR e Z de dimens˜ao 2(n+q)×2(n+q)
βl= [lTq, p T]T, α∗
l = [0, ...,0
| {z }
q
,1, α∗T
]T
lq = [0, ...,0
| {z }
q
,1, lT]T ∈ ℜn+q
l = [ln−2, ln−3, ..., l1, l0]
T
∈ ℜn−1
p= [pn+q−1, pn+q−2, ..., p1, p0]
T
∈ ℜn+q
α∗
= [α∗
2n+q−2, α ∗
2n+q−3, ..., α ∗
1, α
∗
0]
T
∈ ℜ2n+q−1
li,pi e α
∗
i s˜ao os coeficientes de
L(s) =sn−1
+ln−2s
n−2
+...+l1s+l0 =sn−1
+lTαn−2(s)
P(s) = pn+q−1s
n+q−1
+pn+q−2s
n+q−2
+· · ·+p1s+p0 =pTαn+q−1(s)
A∗
(s) = s2n+q−1
+α∗
2n+q−2s
2n+q−2
+· · ·+α∗
1s+α
∗
0 =s2n+q
−1
+α∗T
✲
✒✑ ✓✏
✲ ✲ ✲
✻
P(s)
Qm(s)L(s)
G(s)
r + u y
−
e
Figura 2.1: Diagrama de blocos do PPC. onde αi(s),[si, si−1, . . . ,1]T.
O fato de Qm, R e Z serem coprimos garante que Sl ´e n˜ao-singular e, portanto, os
coeficientes de L(s) e P(s) podem ser computados da equa¸c˜ao
βl=S
−1
l α
∗
l (2.8)
Usando (2.6), a planta em malha fechada ´e descrita por
y= ZM
A∗ r (2.9)
Similarmente, da equa¸c˜ao da planta em (2.1), da lei de controle em (2.3) e (2.6), obtemos
u= RM
A∗ r (2.10)
Devido r ser um sinal uniformemente limitado e ZMA∗ e
RM
A∗ serem pr´oprias com p´olos
est´aveis,yeus˜ao uniformemente limitados para algum polinˆomioM(s) de graun+q−1. Por isso, o objetivo do posicionamento de p´olos ´e alcan¸cado pela lei de controle (2.3) sem ter que adicionar restri¸c˜oes emM(s) eQm(s). Quandor = 0, (2.9) e (2.10) implicam que
y e u convergem para zero com taxa de convergˆencia exponencial. Quando r 6= 0 o erro de rastreamento e=r−y´e dado por
e= A
∗
−ZM A∗ r =
LR
A∗ Qmr−
Z
A∗(M −P)r (2.11)
Para erro de rastreamento nulo, (2.11) sugere a escolha de M(s) = P(s) para anular o segundo termo em (2.11). O primeiro termo em (2.11) ´e anulado usando Qmr = 0. Por
isso, o posicionamento de p´olos e o objetivo de rastreamento s˜ao conseguidos pela lei de controle
QmLu=P(r−y) (2.12)
que ´e implementada como mostrado na Figura 2.1 usando n+q−1 integradores para a realiza¸c˜ao do controladorC(s) = P(s)
Qm(s)L(s)
✲
✒✑ ✓✏
✲ ✲
✒✑ ✓✏
✻
✲
✻
P(s) Λ(s)
Λ(s)−Qm(s)L(s)
Λ(s)
G(s)
r + u y
−
✛
✲
+ +
Figura 2.2: Uma realiza¸c˜ao alternativa do PPC.
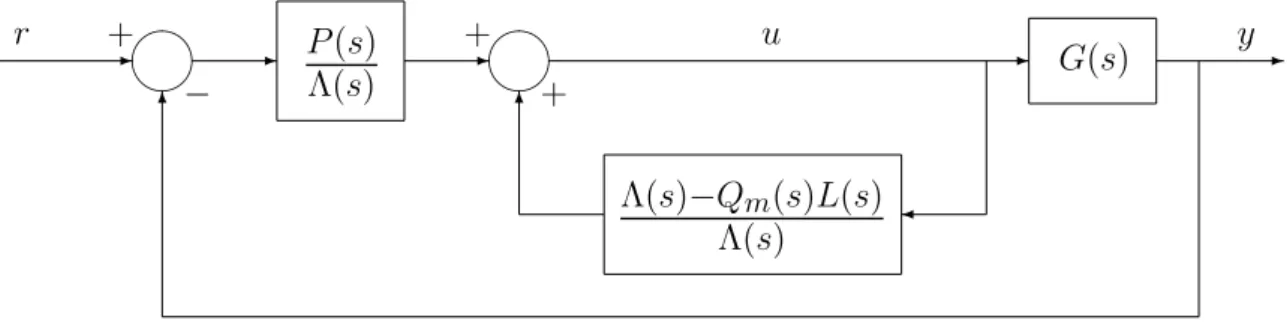
a realiza¸c˜ao de (2.12) com n+q−1 integradores pode ter uma fun¸c˜ao de transferˆencia, nomeada C(s), com p´olos no semi-plano direito. Uma realiza¸c˜ao alternativa de (2.12) ´e obtida reescrevendo (2.12) como
u= Λ−LQm Λ u−
P
Λ(y−r) (2.13) onde Λ ´e algum polinˆomio Hurwitz de grau n+q−1. A lei de controle (2.13) ´e imple-mentada como mostrada na Figura 2.2 usando 2(n+q−1) integradores para realizar as fun¸c˜oes de transferˆencia est´aveis pr´oprias Λ−LQm
Λ e
P
Sistemas com Estrutura Vari´
avel
3.1
Introdu¸c˜
ao
Conforme foi dito no Cap´ıtulo 1, o VSC tem sua fundamenta¸c˜ao no controle por rel´es, sendo as fun¸c˜oes de chaveamento das vari´aveis de controle projetadas de modo a restrin-gir a dinˆamica do sistema a uma superf´ıcie chamada superf´ıcie deslizante, e tem como principais caracter´ısticas a rapidez do transit´orio e robustez a varia¸c˜oes param´etricas e perturba¸c˜oes (dentro de uma faixa de tolerˆancia estipulada no projeto). Esta estrat´egia de controle tem sido usada com sucesso em manipuladores rob´oticos, ve´ıculos submarinos, motores el´etricos de alta performance e sistemas de potˆencia [2]. O VSC com modos deslizantes ´e largamente utilizado em pesquisa na ´area de controle por ser insens´ıvel a varia¸c˜oes param´etricas e perturba¸c˜oes externas [8].
O projeto do controle por modos deslizantes geralmente envolve dois passos principais: primeiro, ´e feita a sele¸c˜ao de uma superf´ıcie deslizante que induza a uma dinˆamica de ordem reduzida est´avel designada pelo projetista, e, posteriormente, a s´ıntese de uma lei de controle para for¸car as trajet´orias do sistema em malha fechada irem e permanecerem na superf´ıcie deslizante.
A maioria das t´ecnicas de projeto para controle por modos deslizantes sup˜oe que todos os estados do sistema s˜ao acess´ıveis para a lei de controle. Na pr´atica, nem todos os estados est˜ao fisicamente dispon´ıveis para realimenta¸c˜ao. Neste caso, um controlador por modos deslizantes com realimenta¸c˜ao de estados n˜ao pode ser implementado, a menos que um observador seja usado para estimar os estados n˜ao-mensur´aveis [26], ou os m´etodos
✲ ✻ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗◗ ◗ ◗ ◗ ◗ ◗ ◗ ◗
◗◗s
x1 x2
s(x)>0 ˙
s(x)<0
s(x)<0 ˙
s(x)>0
❄ ✲ f+(x)
f−
(x)
s(x) = cx1+x2 = 0
r
x(0)
Figura 3.1: Superf´ıcie de deslizamento em um sistema de estrutura vari´avel.
de projeto devem ser modificados de tal forma que somente um subconjunto dos estados seja requerido para implementar a lei de controle.
Este cap´ıtulo tem por objetivo apresentar o desenvolvimento matem´atico do VSC, para um sistema de segunda ordem, que ´e fundamental para o desenvolvimento de um controlador adaptativo com leis chaveadas.
3.2
Descri¸c˜
ao Geral
Consideremos o seguinte sistema de segunda ordem ˙
x1 =x2
˙
x2 =a1x1+a2x2+u
(3.1)
com a1 ea2 conhecidos com incertezas.
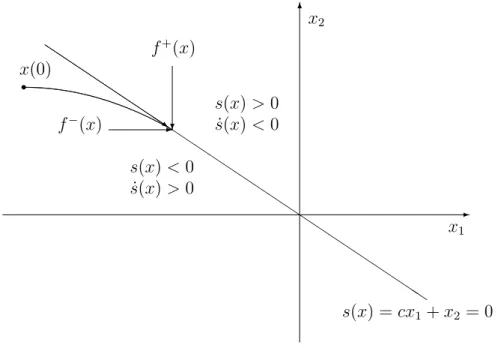
Define-se uma superf´ıcie de chaveamentos como
s=x∈R2 |s(x) = cx1+x2 = 0, c >0 (3.2) na qual deseja-se que permane¸cam as vari´aveis de estado x1 e x2 (dinˆamica do sistema),
Utiliza-se um sinal de controle da forma
u(x) =
u+(x), se s(x)>0
u−
(x), se s(x)<0
(3.3)
Sendof(x) uma fun¸c˜ao definida como
f(x) =
x2
a1x1+a2x2+u
(3.4)
o sistema passa a ser
˙
x=
f+(x), se s(x)>0
f−
(x), se s(x)<0 (3.5) Se a condi¸c˜ao ss <˙ 0 ´e satisfeita em uma vizinhan¸ca de s(x) = 0, os campos vetoriais
f+(x) e f−
(x) apontam para s nesta vizinhan¸ca. Portanto, se uma trajet´oria alcan¸ca s, ´e for¸cada a deslizar (escorregar ou apresentar um modo deslizante - sliding mode) sobre esta superf´ıcie, ou seja, ´e definido um modo deslizante em s.
Consideremos o sinal de controle
u=θ1x1+θ2x2 (3.6) com
θ1 =−θ1sgn¯ (sx1), θ1¯ >|a1|
θ2 =−θ¯2sgn(sx2), θ¯2 >|c+a2|
(3.7) onde
sgn(x) =
1, se x >0
−1, se x <0
(3.8)
Os valores dos parˆametros ¯θ determinam a rapidez com que a trajet´oria atinge a superf´ıcie de deslizamento. Pela condi¸c˜ao de deslizamento temos
ss˙ =s(cx˙1+ ˙x2) =s(cx2+a1x1+a2x2+u) (3.9)
Substituindo (3.6) em (3.9), encontramos
ss˙=s[a1x1+ (a2+c)x2+θ1x1+θ2x2] (3.10) Usando (3.7) em (3.10), obtemos
ss˙ =sa1x1+ (a2+c)x2−θ1sgn¯ (sx1)x1−θ2sgn¯ (sx2)x2 ss˙ =a1sx1−θ¯1|sx1|+ (a2+c)sx2 −θ¯2|sx2|
✲ ✲
u 1 uav
τ s+1
Figura 3.2: Filtro passa-baixa para obten¸c˜ao de ueq.
Ent˜ao, a condi¸c˜ao de deslizamentoss <˙ 0 ´e obtida com ¯θ1 >|a1|e ¯θ2 >|c+a2|. Portanto, s torna-se uma superf´ıcie deslizante (Figura 3.1).
Se a1 e a2 s˜ao variantes no tempo e/ou conhecidos com incertezas, a condi¸c˜ao de
deslizamento pode ser satisfeita desde que os parˆametros do vetor ¯θ sejam devidamente dimensionados, ou seja,
¯
θ1 > supt>0|a1(t)|
¯
θ2 > supt>0|c+a2(t)|
(3.12)
Este sistema de controle apresenta dificuldades de implementa¸c˜ao devido `a necessi-dade de medi¸c˜ao de todas as vari´aveis de estado da planta e ao surgimento de sinais de alta frequˆencia (chattering), devido `a excessiva atividade de controle decorrente de imperfei¸c˜oes nos mecanismos de chaveamento reais.
3.3
Controle Equivalente
O Controle Equivalente [6] ´e definido como o controle cont´ınuo que, quando a trajet´oria est´a sobre a superf´ıcie deslizante, deveria ser aplicado para manter a trajet´oria sobre esta superf´ıcie.
No deslizamento, temos para o caso ideal ˙s≡0. Ent˜ao
cx˙1+ ˙x2 = 0
cx2+a1x1+a2x2+u= 0 ueq=−a1x1−(a2+c)x2
Na pr´atica, a obten¸c˜ao de ueq ´e feita atrav´es da filtragem de u (uav) por um filtro
passa-baixa com freq¨uˆencia de corte suficientemente elevada. Se a freq¨uˆencia de corte do filtro (1
✲ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅ ❅❅ x1 f−
f+ f∗
s(x) = 0
❄
✲ ❅
❅ ❅❅❘
Figura 3.3: Campo vetorial no modo deslizante (solu¸c˜ao de Filippov)
3.4
Solu¸c˜
ao de Filippov
As equa¸c˜oes diferenciais que surgem em sistemas com estrutura vari´avel apresentam lado direito descont´ınuo (devido `a descontinuidade introduzida pelo controle) e, assim, n˜ao ´e poss´ıvel garantir a existˆencia e unicidade de uma solu¸c˜ao para o sistema. Filippov [28] propˆos uma defini¸c˜ao que ´e particularmente adequada para o tipo de equa¸c˜oes diferenciais que surgem em sistemas com estrutura vari´avel. Basicamente, as solu¸c˜oes no sentido de Filippov s˜ao absolutamente cont´ınuas como fun¸c˜oes do tempo e, tamb´em, cont´ınuas em rela¸c˜ao `as condi¸c˜oes iniciais. Isto torna poss´ıvel a extens˜ao do m´etodo direto de Lyapunov na an´alise de estabilidade de sistemas com estrutura vari´avel.
Se ocorre deslizamento em uma dada superf´ıcie s, um campo vetorial f∗
em cada ponto desta superf´ıcie pode ser determinado a partir dos campos vetoriais f+ e f−
dire-cionados conforme a Figura 3.3. Desta maneira ´e obtido um fecho convexo m´ınimo que ´e a base do m´etodo de Filipov. Uma vez que, o deslizamento ideal ocorre na superf´ıcie de deslizamento, o campo vetorial permanece em um plano tangencial `a superf´ıcie. Assim, a equa¸c˜ao para o deslizamento ideal, definida de acordo com Filippov, ´e dada por
f∗
=αf++ (1−α)f−
f−
e do gradiente da fun¸c˜ao s(x).
Controle Adaptativo por
Posicionamento de P´
olos e Estrutura
Vari´
avel
4.1
Introdu¸c˜
ao
Em trabalhos anteriores, foi desenvolvida uma t´ecnica de controle que absorveu as qualidades do VSC, utilizando, ao inv´es de medi¸c˜oes de todas as vari´aveis de estado do sistema, apenas medi¸c˜oes de entrada e sa´ıda da planta, a qual foi denominada Controle Adaptativo por Modelo de Referˆencia e Estrutura Vari´avel (VS-MRAC) [11,29-30], tendo em vista que as leis de adapta¸c˜ao integrais do MRAC [31] foram substitu´ıdas por leis chaveadas. Este algoritmo se baseava na abordagem direta do MRAC, sendo assim limi-tada a plantas de fase m´ınima. Com o intuito de simplificar o projeto do controlador, foi proposto um novo controlador, chamado VS-MRAC indireto [32-34], o qual utilizava informa¸c˜oes dos pr´oprios parˆametros nominais da planta para o c´alculo da amplitude dos rel´es, uma vez que tais parˆametros representam grandezas f´ısicas, tais como resistˆencias, capacitˆancias, momentos de in´ercia, etc.
Neste trabalho, ´e proposto um controlador que agrega as caracter´ısticas do APPC e do VSC, isto ´e, aplicabilidade a plantas de fase n˜ao-m´ınima, transit´orio r´apido e robustez, que ´e denominado VS-APPC [21-23], onde, assim como no VS-MRAC, as leis adaptativas integrais foram substitu´ıdas por leis chaveadas.
Neste cap´ıtulo, o objetivo ´e descrever matematicamente o VS-APPC, onde o chavea-mento ´e realizado nas leis de adapta¸c˜ao dos parˆametros da planta. As incertezas nos parˆametros da planta podem ser conhecidas mais facilmente, pois representam incertezas de parˆametros f´ısicos. Neste trabalho, ser´a abordado o caso de uma planta de primeira ordem.
4.2
Descri¸c˜
ao do M´
etodo
Consideremos a seguinte planta
y= b
s+au⇒y˙ =−ay+bu (4.1)
onde a e b s˜ao constantes e conhecidas com incertezas. Temos como objetivo estimar a e
b e gerar um sinal de controle u para quey tenda assintoticamente ao sinal de referˆencia
r e para que os p´olos de malha fechada da planta (4.1) sejam alocados nas ra´ızes de
A∗
(s) =s2+α∗
1s+α
∗
0 = 0.
Sejaam >0. Ent˜ao, podemos escrever (4.1) como
˙
y=−amy+ (am−a)y+bu (4.2)
Um modelo para a planta pode ser escrito como ˙ˆ
y=−amyˆ+ (am−ˆa)y+ ˆbu (4.3)
onde ˆa e ˆb s˜ao estimativas para a e b, respectivamente [25]. Definimos o erro de estima¸c˜ao e0 como
e0 =y−yˆ (4.4)
e, portanto,
˙
e0 =−ame0+ ˜ay−˜bu (4.5)
com
˜
a= ˆa−a
˜b= ˆb−b (4.6) Comoa e b s˜ao constantes, por hip´otese, temos:
˙˜
a = ˙ˆa
˙˜
b =b˙ˆ
Nos algoritmos convencionais (com leis integrais de estima¸c˜ao) utilizamos ˙ˆ
a=−γ1e0y, γ1 >0
˙ˆ
b=γ2e0u, γ2 >0
(4.8)
onde γ1 e γ2 s˜ao os ganhos adaptativos.
Seja a seguinte candidata a fun¸c˜ao de Lyapunov
V(e0,˜a,˜b) = 1 2 e 2 0+ ˜ a2 γ1
+ ˜b
2 γ2
!
>0 (4.9) ent˜ao,
˙
V(e0,˜a,˜b) =e0e˙0+
˜
aa˙˜ γ1 +
˜
bb˙˜
γ2 (4.10)
Substituindo (4.8) em (4.10) ficamos com ˙
V(e0,a,˜ ˜b) =−ame20 ≤0 (4.11)
que garante [e0,˜a,˜b]T = [0,0,0]T como um ponto de equil´ıbrio est´avel.
As leis de adapta¸c˜ao s˜ao do tipo puramente integral (necessidade de ”mem´oria”por parte do mecanismo de adapta¸c˜ao) e podem levar o sistema a apresentar um comporta-mento inst´avel na presen¸ca de dist´urbios externos ou dinˆamica n˜ao modelada da planta [24].
No VS-APPC utiliza-se a mesma estrutura de controle do APPC, por´em com um sinal de controle chaveado da mesma forma que o controlador VSC. Portanto, a proposta deste trabalho ´e substituir as leis integrais de estima¸c˜ao (leis adaptativas) pelas seguintes leis chaveadas para o c´alculo de ˆa e ˆb:
ˆ
a=−asgn¯ (e0y), a >¯ |a|
ˆb= ¯bsgn(e0u), ¯b >|b| (4.12) As amplitudes dos rel´es (¯a e ¯b) devem dominar os valores m´aximos dos parˆametros da planta, para que se possa garantir a estabilidade assint´otica, conforme mostra a se¸c˜ao seguinte.
4.3
Prova de Estabilidade
Seja a seguinte candidata a fun¸c˜ao de Lyapunov
V(e0) = 1 2e
2
ent˜ao,
˙
V(e0) =e0e˙0
=−ame20+ ˜ae0y−˜be0u
=−ame20+ (ˆa−a)e0y−(ˆb−b)e0u
=−ame20+ [−¯asgn(e0y)−a]e0y−[¯bsgn(e0u)−b]e0u
=−ame20−(¯a|e0y|+ae0y)−(¯b|e0u| −be0u)
(4.14)
Desde que ¯a >|a|e ¯b >|b|, ficamos com ˙
V(e0)≤ −ame20 <0 (4.15)
o que garantee0 = 0 um ponto de equil´ıbrio globalmente assintoticamente est´avel. Como lim
t→∞|
e0|= 0, n´os temos
|e0˙| ≥c >0,∀t ≥tf >0 (4.16)
Ent˜ao,e0 atinge a superf´ıcie deslizantee0 = 0 em um tempo finitotf. Este procedimento
´e similar a [29].
Com esta t´ecnica de controle, n˜ao podemos garantir a convergˆencia das estimativas para os valores corretos dos parˆametros da planta, j´a que n˜ao se trata de adapta¸c˜ao param´etrica e sim de uma lei de controle chaveada. As simula¸c˜oes que s˜ao mostradas no cap´ıtulo seguinte mostram uma not´avel insensibilidade a varia¸c˜oes param´etricas e perturba¸c˜oes.
4.4
C´
alculo dos Parˆ
ametros do Controlador
Conforme mostrado na Se¸c˜ao 2.2.2, a lei de controle
Qm(s)L(s)u=P(s)(r−y) (4.17)
pode ser usada para conseguir o objetivo de controle. Neste trabalho, o controlador ser´a projetado para uma referˆencia constante. Como o polinˆomioQm(s) ´e calculado de acordo
Para uma planta de primeira ordem, temos: L(s) = 1 eP(s) =p1s+p0 e os coeficientes p1 e p0 satisfazem a equa¸c˜ao Diofantina
s(s+a) + (p1s+p0)b =s2 +α∗
1s+α
∗
0 (4.18)
A equa¸c˜ao (4.18) pode ser escrita na forma da equa¸c˜ao alg´ebrica (2.7), ou seja, a matriz de Sylvester de s(s+a) e b ´e dada por
1 0 0 0
a 1 0 0 0 a b 0 0 0 0 b
0 1 p1 p0 = 0 1 α∗ 1 α∗ 0 (4.19)
cuja solu¸c˜ao ´e
p1 = α∗
1−a
b e p0 = α∗
0
b (4.20)
Como supomos que os parˆametros da planta s˜ao conhecidos com incertezas, o princ´ıpio da equivalˆencia `a certeza sugere o uso da mesma lei de controle, mas com o polinˆomio
P(s) = p1s+p0 calculado usando as estimativas dos parˆametros, e, portanto, temos
ˆ
p1 = α∗
1−aˆ
ˆb e pˆ0 =
α∗
0
ˆ
b (4.21)
onde ˆp1 e ˆp0 s˜ao as estimativas dos parˆametros do controlador que precisam ser geradas em tempo real. No APPC indireto convencional s˜ao utilizadas leis adaptativas que s˜ao guiadas pelo erro e0. Para isso, podem ser utilizados o m´etodo do gradiente, o m´etodo dos m´ınimos quadrados, etc. A estima¸c˜ao dos parˆametros pelo m´etodo do gradiente ´e dada por (4.8). Para o VS-APPC ser˜ao substitu´ıdas as leis adaptativas por leis chaveadas conforme (4.12).
Uma vez que os parˆametros do controlador podem ser fun¸c˜oes de mais de um parˆametro da planta simultaneamente, o sinal pode ficar indefinido, pois existem dois ou mais sinais chaveados em freq¨uˆencias elevadas. Al´em disso, o parˆametro ˆb aparece no denominador das express˜oes, o que pode causar divis˜oes por zero. Com isso, faz-se necess´aria a in-trodu¸c˜ao de um valor nominal do parˆametro ˆb, para manter o valor com sinal definido. Reescrevendo as leis chaveadas com a modifica¸c˜ao na express˜ao de ˆb, temos
ˆ
a=−asgn¯ (e0y),a >¯ |a|
✲ ✲
✲
b s+a u
✛
❄ ❄
❄ ❄
❄
✛ ✛
ˆ
a=−asgn¯ (e0y)
ˆ
b = ¯bsgn(e0u) +bnom
ˆ
p1 = pˆ0 = α∗0
ˆ
b α∗1−ˆa
ˆ
b
,
✍✌ ✎☞ (ˆp1s+ˆp0)
s
u e
y
ˆ
a ˆb
ˆ
p1 pˆ0
−
+
r
Figura 4.1: Diagrama de blocos do VS-APPC para planta de primeira ordem.
O sinal de controleu ´e gerado a partir da equa¸c˜ao (4.17) e, portanto, ´e dado por
˙
u= ˆp0r−pˆ1y˙−pˆ0y (4.23)
Aplica¸c˜
ao do Controlador
5.1
Planta de Primeira Ordem Inst´
avel
Nesta se¸c˜ao, a estrat´egia de controle proposta no cap´ıtulo anterior ser´a projetada para uma planta do tipo
G(s) = 1
s−1 =
b
s+a (5.1)
cujo polinˆomio caracter´ıstico escolhido ´e
A∗
(s) = (s+ 1)2 =s2+ 2s+ 1 (5.2) Utilizamos (4.22) para encontrar ˆa e ˆb e, com estes valores, calculamos os parˆametros do controlador, que de acordo com (4.21) e (5.2) s˜ao
ˆ
p1 = 2−aˆ
ˆb e p0ˆ = 1
ˆb (5.3)
O sinal de controle ´e calculado pela equa¸c˜ao (4.23).
5.1.1
Simula¸c˜
oes
Todas as simula¸c˜oes deste trabalho foram feitas com a utiliza¸c˜ao do programa MAT-LAB 6 [35], utilizando como m´etodo de integra¸c˜ao o m´etodo de Euller.
Para a planta descrita em (5.1), foi utilizado um intervalo de integra¸c˜ao deh= 0,01s. A referˆencia utilizada para a planta (5.1) foi r= 1.
Inicialmente foi feita uma simula¸c˜ao utilizando nas leis adaptativas o m´etodo do gra-diente. Foram manipulados os ganhos adaptativos e, para efeito de compara¸c˜ao com a
Figura 5.1: APPC Indireto utilizando o m´etodo do gradiente.
t´ecnica proposta neste trabalho, escolhemos um resultado obtido quandoγ1 = 1 e γ2 = 1,
que tem uma magnitude do sinal de controle de 0,353. A sa´ıda da planta converge em 6,52s considerando uma tolerˆancia de 2%. A Figura 5.1 mostra o resultado desta simula¸c˜ao.
Na simula¸c˜ao seguinte (Figura 5.2), as leis adaptativas convencionais foram subs-titu´ıdas pelas leis chaveadas propostas em (4.22). Como temos trˆes constantes para serem projetadas, diversos testes foram feitos combinando valores para as mesmas, com o objetivo de conseguir o melhor resultado poss´ıvel em rela¸c˜ao ao tempo de convergˆencia. Ap´os os testes feitos, utlizamos as constantesbnom = 1,5, ¯b= 0,7 e ¯a= 1,1. Observou-se
que a sa´ıda da planta converge em 2,66s considerando tamb´em uma tolerˆancia de 2%. Para uma mesma magnitude do sinal de controle (0,353) do caso anterior, o VS-APPC apresentou uma convergˆencia do sinal de sa´ıda da planta bem mais r´apida do que o m´etodo do gradiente. A Figura 5.3 mostra a evolu¸c˜ao do comportamento dos parˆametros da planta. Podemos observar que o sinal de controle ´e bem mais suave que no caso do VS-MRAC, devido ao polinˆomio Qm, que multiplica o sinal de controle u atuando como
Figura 5.2: VS-APPC Indireto para sistema de primeira ordem.
5.2
Motor de Indu¸c˜
ao Trif´
asico
Nos dias atuais, os motores de indu¸c˜ao tˆem cada vez mais tomado o lugar dos motores CC em aplica¸c˜oes de alto desempenho [36]. Em rela¸c˜ao ao motor CC, o motor de indu¸c˜ao apresenta como vantagens robustez, baixo custo, menor frequˆencia de manuten¸c˜ao, e no caso de motores com rotor em gaiola de esquilo, sua principal vantagem ´e a ausˆencia de contatos deslizantes. No entanto, na m´aquina CC o controle de velocidade se d´a de uma forma bastante simples, j´a que o torque e o fluxo podem ser impostos `a m´aquina de uma forma desacoplada. Isto fazia com que os motores CC fossem os preferidos em acionamentos de alto desempenho.
Com o surgimento, na d´ecada de 70, da teoria de controle vetorial [37], que ´e baseada na orienta¸c˜ao dada pelo campo do rotor, ´e que se teve ferramentas te´oricas para controlar a velocidade do motor de indu¸c˜ao de forma desacoplada, semelhante ao motor CC [36,38-39], quando o motor ´e alimentado por fontes de corrente ideais.
Com o avan¸co da eletrˆonica de potˆencia e do aparecimento de microprocessadores mais r´apidos e de menor custo, foi poss´ıvel a implementa¸c˜ao do controle vetorial orientado pelo campo, tornando o motor de indu¸c˜ao mais competitivo em rela¸c˜ao ao motor CC.
Nesta estrat´egia, um elemento importante de incerteza ´e o valor da constante de tempo rot´orica que varia com as condi¸c˜oes de opera¸c˜ao, mudando o comportamento do sistema, o que imp˜oe o uso de alguma estrat´egia de controle adaptativo e/ou robusto, que compense poss´ıveis varia¸c˜oes de parˆametros.
5.2.1
Modelagem
A modelagem do motor de indu¸c˜ao j´a foi bastante discutida em diversos trabalhos [40]. Dessa forma, parte-se do modelo matem´atico em nota¸c˜ao vetorial [36].
Nesta se¸c˜ao ´e usada uma t´ecnica vetorial para modelar o motor de indu¸c˜ao. Define-se um sistema de eixos complexos ortogonais,d eq, onde o fluxo do rotor ´e a referˆencia para o eixo d.
As equa¸c˜oes que descrevem a dinˆamica do motor de indu¸c˜ao s˜ao:
US =RsiS(t) +Ls
d
dt(iS(t)) +Lm d
dt(iR(t)e
jε
) (5.4)
0 = RriR(t) +Lr
d
dt(iR(t)) +Lm d
dt(iS(t)e
−jε
Te(t) =
2
3P LmIm
iS(t)
iR(t)ejε
∗
(5.6)
Jdω(t)
dt =Te(t)−Bω(t)−Tl(t) (5.7) dε(t)
dt =ω(t) (5.8)
onde
US - Vetor tens˜ao do estator;
iS eiR - Vetores corrente do estator e corrente do rotor, respectivamente;
Rs e Rr - Resistˆencias por fase do estator e do rotor, respectivamente;
Ls e Lr - Indutˆancias pr´oprias por fase do estator e do rotor, respectivamente;
Lm - Indutˆancia de magnetiza¸c˜ao por fase;
Te - Torque eletromagn´etico no eixo do motor;
Tl - Torque de carga;
J - Momento de in´ercia do rotor;
B - Coeficiente de atrito viscoso da m´aquina;
P - N´umero de pares de p´olos;
ω(t) - Velocidade angular do eixo do motor;
ε - Posi¸c˜ao angular do eixo do motor (ˆangulo entre os eixos da fase 1 do estator e a fase 1 do rotor);
Im - Componente imagin´ario de um n´umero complexo ”x”; [x]∗
- Operador complexo conjugado de um vetor ”x”.
Na pr´atica, o que se busca com a modelagem vetorial ´e a observa¸c˜ao das correntes do estator de um referencial fixo a um fluxo de referˆencia. Assim, definindo um novo sistema de coordenadas (Figura 5.4) com o eixo de referˆencia direto, dou eixo real (Re), coincidindo com o vetor fluxo do rotor (ψR), a componente do vetor fluxo do rotor no
eixo em quadratura, q ou eixo imagin´ario (Im), ´e anulada, ou seja, ψRq = 0. Baseado na Figura 5.4 e partindo-se da Equa¸c˜ao (5.5), obtemos
0 = Rr
Lr
(ψRd−LmiSe
−jρ
) + d
dt(ψRd) +j
dρ dt −ω
ψRd (5.9)
onde
ψRd - Componente do vetor fluxo do rotor no eixo direto;
Figura 5.4: Diagrama vetorial do motor de indu¸c˜ao (ωs ´e a velocidade s´ıncrona.)
Observando o diagrama vetorial (Figura 5.4) e com (5.9), as componentes do vetor corrente do estator no eixo direto e em quadratura s˜ao calculadas como
iSd=
1
Lm
ψRd+
Lr
RrLm
dψRd
dt (5.10)
iSq =
Lr
RrLm
dρ
dt −ω(t)
ψRd (5.11)
Pela an´alise do diagrama,
iS(t) = (iSd+jiSq(t))ejρ (5.12)
ψR(t) = ψRd(t)ej(ρ
−ε)
(5.13) e, o torque da m´aquina (5.6) fica
Te(t) =
2 3P
Lm
Lr
ψRd(t)iSq(t) (5.14)
quadratura, atrav´es de uma rela¸c˜ao linear, at´e o limite da velocidade nominal do motor. Para obter-se o torque m´aximo, o fluxo de referˆencia ser´a mantido constante e em seu valor m´aximo.
5.2.2
Parˆ
ametros do Motor de Indu¸c˜
ao
Foi utilizado um motor de indu¸c˜ao trif´asico classe ”B”de 0,25 HP, com 4 p´olos, veloci-dade nominal de 1725 rpm (180,64 rad/s), tens˜oes nominais 380 V/220 V para liga¸c˜ao Y e ∆, respectivamente, com freq¨uˆencia nominal de 60 Hz. As correntes nominais s˜ao de 1,26 A em 220 V (liga¸c˜ao ∆) e 0,726 A em 380 V (liga¸c˜ao Y). O rotor ´e do tipo gaiola de esquilo. O conjugado nominal ´e de 1,02 N.m.
A obten¸c˜ao dos parˆametros do motor foi atrav´es de ensaios de curto-circuito e de circuito aberto [38] e confrontados com os dados fornecidos pelo fabricante. Os resultados obtidos s˜ao apresentados na Tabela 5.1.
Rs 29,5012 Ω
Rr 17,8384 Ω
Lm 1,0417 H
Ls 0,0534 + 1,0417 = 1,0951 H
Lr 0,0637 + 1,0417 = 1,1054 H
Tabela 5.1: Parˆametros el´etricos do motor
Tamb´em foi fornecido pelo fabricante o momento de in´ercia do motor, cujo valor ´e
J = 5×10−4
Kg.m
A obten¸c˜ao da equa¸c˜ao de primeira ordem que representa a planta foi baseada no fato de que, utilizando-se o controle vetorial indireto pelo campo do rotor, com alimenta¸c˜ao dada pelo valor de referˆencia da componente da corrente do estator em quadratura (ir
Sq)
e mantendo-se constante o valor de referˆencia do fluxo do rotor no eixo direto (ψr Rd), a
rela¸c˜ao entre o torque el´etrico e a corrente de referˆencia ´e aproximadamente
Te(t) =KirSq (5.15)
A entrada da planta (motor) ´e a componente iSq do vetor corrente de estator e a
sa´ıda ´e a velocidade do rotor ω. Supondo o motor em vazio e sem conjugado de carga, a fun¸c˜ao de transferˆencia da planta ´e, ent˜ao, determinada a partir das equa¸c˜oes (5.7) e (5.15) resultando em
ω(s)
iSq(s)
=
K J
s+ B J
=G(s) = b
s+a (5.16)
Para os valores dos parˆametros obtidos [38], o seguinte modelo nominal ´e obtido
G(s) = 3798
s+ 11,3 (5.17)
5.2.3
Simula¸c˜
oes
Para a planta descrita em (5.17), foi um escolhido um polinˆomio caracter´ıstico que n˜ao exigisse um sinal de controle de alta magnitude. Portanto, o polinˆomio escolhido foi
A∗
(s) = (s+ 12)2 =s2+ 24s+ 144 (5.18) Como a fun¸c˜ao de transferˆencia do motor de indu¸c˜ao tamb´em ´e de primeira ordem, temos os mesmos polinˆomiosL(s) e P(s) do caso anterior e tamb´em o mesmo polinˆomio Qm(s),
j´a que aqui o sinal de referˆencia tamb´em ´e constante. Os parˆametros do controlador s˜ao
ˆ
p1 = 24−ˆa ˆ
b e p0ˆ =
144
ˆb (5.19)
As leis chaveadas utilizadas para o motor de indu¸c˜ao s˜ao as mesmas de (4.22) e o sinal de controle ´e calculado a partir de (4.23).
Para o motor de indu¸c˜ao, foi utilizado um passo de integra¸c˜ao de h = 1ms, ou seja, menor que no caso anterior (h= 10ms). O sinal de referˆencia foi de r= 900 rpm.
Assim como para a planta anterior, foram feitos diversos testes at´e que se chegasse em trˆes constantes que apresentassem um resultado satisfat´orio. As constantes utilizadas que mostraram os melhores resultados foram bnom = 3600, ¯b = 3550 e ¯a = 22 (Figura 5.5).
O sinal de sa´ıda da planta e o sinal de referˆencia s˜ao dados em rpm e o sinal de controle
u=iSq ´e dado em mA. Foi verificado que a sa´ıda da planta converge em 0,247s.
Figura 5.5: VS-APPC para o controle de velocidade de um motor de indu¸c˜ao trif´asico.
a robustez do controlador a este tipo de comportamento. Ap´os o primeiro segundo da simula¸c˜ao, o parˆametro b foi alterado de 3798 para 3700, aos 2s de 3700 para 3900 e aos 3s para 3798 novamente. O parˆametro a foi alterado de 11,3 para 9 aos 3,5s, de 9 para 11,8 aos 4,5s e de 11,8 para 11,3 aos 5,5s. A Figura 5.6 mostra o detalhe da regi˜ao onde acontecem as mudan¸cas no sinal de controle e no sinal de sa´ıda da planta. Podemos observar que o sinal de controle atua no comportamento do sistema, de tal forma que, apesar das altera¸c˜oes afetarem o sinal de sa´ıda da planta, rapidamente o sinal de sa´ıda volta a seguir a referˆencia.
Figura 5.6: Altera¸c˜ao dos parˆametros da planta.
5.2.4
Sistema de Acionamento
O sistema de acionamento, que foi utilizado na implementa¸c˜ao do controlador VS-APPC, ´e mostrado na Figura 5.8 [41]. Ele ´e composto por um motor de indu¸c˜ao de 0.25 HP, alimentado por um inversor trif´asico VSI/PWM com controle de corrente por janela de histerese. No controle de corrente s˜ao usados sensores de efeito Hall para a medi¸c˜ao das correntes de duas fases do motor. Um microcomputador recebe a velocidade do motor, atrav´es do sinal de um tacogerador.
A sa´ıda do tacogerador ´e uma tens˜ao alternada cuja frequˆencia e valor eficaz s˜ao proporcionais `a velocidade do motor. Essa tens˜ao alternada ´e atenuada, retificada e filtrada (eliminando os ru´ıdos de medi¸c˜ao) gerando uma tens˜ao cont´ınua proporcional `a velocidade do motor. A constante de proporcionalidade do motor ´e obtida de acordo com a Tabela 5.2. Uma placa de interface A/D transforma esta tens˜ao cont´ınua em um sinal digital para o microcomputador. No microcomputador, um algoritmo de controle, escrito em linguagem ”C”, calcula as correntes de referˆencia e, atrav´es de um conversor D/A, estas correntes s˜ao fornecidas ao inversor VSI/PWM para a alimenta¸c˜ao do motor.
A placa conversora AD/DA trabalha com tens˜oes de 0 a +10 V e, assim, o sinal de tens˜ao retificado, proporcional `a velocidade, ´e ajustado para esta faixa. As correntes de referˆencia, geradas a partir do algoritmo de controle, s˜ao alternadas, de forma que um n´ıvel DC deve ser adicionado para compensar o ciclo negativo das correntes de referˆencia. A interface D/A da placa possui apenas duas sa´ıdas e, ent˜ao, apenas duas correntes de referˆencia, geradas pelo algoritmo de controle, podem ser enviadas. Como o circuito ´e trif´asico equilibrado, a terceira corrente pode ser obtida pelo valor negativo da soma das outras duas. Assim, projetou-se um circuito para subtrair o n´ıvel DC adicionado `as duas correntes de referˆencia geradas pelo controlador, e criar a terceira corrente de referˆencia.
TENS ˜AO (Volts) 0,00 4,30 6,05 7,65 10,07 VELOCIDADE (rpm) 0,00 975,20 1405,00 1820,00 2442,00
✻
✲ ✲
✲
❅ ❅
❅ ❅❅❘ ✁✁❆❆
r r r
❅❅ ✛ ✛ ✛
Pentium IV 2.8 GHz
v ∝ω
Tacˆometro
Motor de
Inversor
Indu¸c˜ao
irS1 irS2
ir S3
iS1 iS2 iS3
Figura 5.8: Sistema de acionamento.
5.2.5
Implementa¸c˜
ao Pr´
atica
Nesta implementa¸c˜ao, foi medido o per´ıodo de amostragem referente ao tempo de processamento do algoritmo de controle e de convers˜oes A/D-D/A, cujo resultado foi
h= 150µs.
Conclus˜
oes e Perspectivas
Neste trabalho foi proposto um controlador adaptativo por posicionamento de p´olos e estrutura vari´avel, denominado VS-APPC [21-23], que procurou agregar as caracter´ısticas do APPC e do VSC, isto ´e, aplicabilidade a plantas de fase n˜ao-m´ınima, transit´orio r´apido e robustez, atrav´es da substitui¸c˜ao das leis adaptativas convencionais por leis chaveadas. Foram feitas duas aplica¸c˜oes: uma para o controle de uma planta inst´avel, atrav´es de simula¸c˜oes, e outra para o controle de velocidade de um motor de indu¸c˜ao trif´asico, onde foram feitas inicialmente simula¸c˜oes, e posteriormente a implementa¸c˜ao pr´atica. A t´ecnica proposta apresentou transit´orio bastante r´apido em ambas as aplica¸c˜oes.
O controlador VS-APPC indireto apresenta um projeto simples, com o c´alculo das amplitudes dos rel´es estando diretamente relacionado com os parˆametros f´ısicos da planta. A sequˆencia deste trabalho se dar´a com a posterior generaliza¸c˜ao para plantas de ordem qualquer. A generaliza¸c˜ao segue os mesmos passos do APPC apresentado em [25] e neste trabalho.
Modelos Entrada/Sa´ıda
A.1
Fun¸c˜
oes de Transferˆ
encia
As fun¸c˜oes de transferˆencia s˜ao muito importantes na caracteriza¸c˜ao das propriedades entrada/sa´ıda de sistemas LTI e s˜ao usadas largamente na teoria de controle cl´assica. Vamos considerar um sistema descrito pela equa¸c˜ao diferencial de ordem n
y(n)(t) +an−1y
(n−1)
(t) +· · ·+a0y(t) = bmu(m)(t) +bm−1u
(m−1)
(t) +· · ·+b0u(t) (A.1)
Para obtermos a fun¸c˜ao de transferˆencia do sistema (A.1), n´os aplicamos a transfor-mada de Laplace em ambos os lados da equa¸c˜ao e assumimos condi¸c˜oes iniciais nulas. Portanto, comssendo a vari´avel complexa, temos a seguinte fun¸c˜ao de transferˆencia para (A.1)
G(s), Y(s)
U(s) =
bmsm+bm−1s
m−1
+· · ·+b0 sn+a
n−1sn
−1+· · ·+a
0
(A.2) N´os dizemos que G(s) ´e pr´opria se G(∞) ´e finita, ou seja, n ≥ m; e estritamente pr´opria seG(∞) = 0, ou seja, n > m.
A equa¸c˜ao caracter´ıstica do sistema (A.1) ´e definida como a equa¸c˜ao sn+a n−1s
n−1
+
· · ·+a0 = 0.
A.2
Polinˆ
omios Coprimos
As propriedades de entrada/sa´ıda dos sistemas apresentados neste trabalho s˜ao repre-sentadas por fun¸c˜oes de transferˆencia expressas como a raz˜ao de dois polinˆomios em s
com coeficientes reais, ou seja,
![Figura 2.1: Diagrama de blocos do PPC. onde α i (s) , [s i , s i−1 , . . . , 1] T .](https://thumb-eu.123doks.com/thumbv2/123dok_br/15558043.100138/27.892.181.717.149.249/figura-diagrama-blocos-do-ppc-onde-α-t.webp)