MODELAGEM DO PARTICULADO EM SISTEMAS
GÁS-SÓLIDO UTILIZANDO O MODELO DE DOIS
FLUIDOS E O MÉTODO DOS ELEMENTOS
DISCRETOS
Tese apresentada à Escola de Engenharia de São Carlos da Universidade de São Paulo para obtenção do Título de Doutor em Engenharia Mecânica.
MODELAGEM DO PARTICULADO EM SISTEMAS
GÁS-SÓLIDO UTILIZANDO O MODELO DE DOIS
FLUIDOS E O MÉTODO DOS ELEMENTOS
DISCRETOS
Tese apresentada à Escola de Engenharia de São Carlos da Universidade de São Paulo para obtenção do Título de Doutor em Engenharia Mecânica.
Orientador:
Helio Aparecido Navarro
ESTE EXEMPLAR TRATA-SE DA VER-SÃO CORRIGIDA. A VERVER-SÃO ORIGINAL ENCONTRA-SE DISPONÍVEL JUNTO AO DEPARTAMENTO DE ENGENHARIA MECÂ-NICA DA EESC-SP.
Souza Braun, Meire Pereira de
S719m Modelagem do particulado em sistemas gás-sólido
utilizando o modelo de dois fluidos e o método dos elementos discretos / Meire Pereira de Souza Braun; orientador Helio Aparecido Navarro; coorientador Paulo Sergio Varoto. São Carlos, 2013.
Tese (Doutorado) - Programa de Pós-Graduação em Engenharia Mecânica e Área de Concentração em Dinâmica de Máquinas e Sistemas -- Escola de Engenharia de São Carlos da Universidade de São Paulo, 2013.
À Deus, pela dádiva da vida, por ter me concedido sabedoria para a realização deste trabalho, por me abençoar e me confortar nas horas difíceis.
Ao meu esposo Francisco, pelo apoio, amor e carinho.
Aos meus pais Luiza e Renato (in memoriam) pelo amor incondicional, pelos en-sinamentos, e pelo apoio em todos os momentos da minha vida.
Aos meus irmãos Marisa, Amauri, Mauricéia e Renato Fillho que sempre me apoi-aram em tudo, que são e sempre serão meus melhores amigos.
Ao Professor Dr. Hélio Aparecido Navarro, pela amizada e orientação no desen-volvimento do trabalho.
Aos Professores do Departamento de Engenharia Mecânica da USP, Campus de São Carlos, que contribuíram no desenvolvimento deste trabalho.
Aos amigos, que estiveram presentes e contribuíram direta ou indiretamente na realização do trabalho.
Aos funcionários e técnicos da EESC, pelo atendimento e colaboração.
Ao Laborátorio de dinâmica do Departamento de Engenharia Mecânica da EESC/USP, pelas facilidades oferecidas.
Souza Braun, M. P. (2013) Modelagem do particulado em sistemas gás-sólido utili-zando o modelo de dois fluidos e o Método dos Elementos Discretos. São Carlos,
2013 - Escola de Engenharia de São Carlos, Universidade de São Paulo.
A presente pesquisa tem como objetivo realizar um estudo teórico e desenvolver si-mulações computacionais envolvendo a dinâmica de sistemas gás-sólido. O foco prin-cipal do trabalho é a modelagem do particulado através da análise das forças de contato entre partículas de materiais granulares utilizando modelos contínuos baseados na me-cânica dos solos e na teoria cinética dos escoamentos granulares (sistemas grandes com muitas partículas, formulação Euleriana - Volumes Finitos) e modelos discretos baseados nas características físicas dos materiais (sistemas intermediários e número limitado de partículas, formulação Lagrangeana - Método dos Elementos Discretos). Investigam-se os modelos existentes na literatura com intuito de melhorar os modelos contínuos e discretos baseados na interação entre as partículas que caracterizam a di-nâmica do particulado em sistemas gás-sólido. Propõe-se uma nova abordagem para a determinação do coeficiente de rigidez da mola baseada em uma equivalência entre os modelos lineares e não-lineares. Utiliza-se o código fonte MFIX para realizar simu-lações computacionais da dinâmica de sistemas gás-sólido, analisando o processo de fluidização, mistura e segregação de partículas, influência das correlações de arrasto, e análise das forças de contato entre as partículas através do novo método para a de-terminação do coeficiente de rigidez da mola . Os resultados obtidos são comparados com dados numéricos e experimentais da literatura.
Souza Braun, M. P. (2013) Study of the dynamic in gas-solid systems using the two-fluid model and the Discrete Element Method. São Carlos, 2013 - Escola de
Engenharia de São Carlos, Universidade de São Paulo.
The purpose of the present study is to perform a theoretical study and develop nume-rical simulations involving dynamic in gas-solid systems. The focus of the work is the modeling of particulate matter using continuous models based on soil mechanics and the kinetic theory of granular flows (large systems with many particles, Eulerian formulation - Finite Volume) and discrete models based on physical characteristics of the particles (intermediate systems and limited number of particles, Lagrangian for-mulation - Discrete Element Method). It is proposed a new approach to determine the normal spring stiffness coefficient of the linear model through the numerical solution for the overlap between particles in non-linear models. The linear spring stiffness is determined using an equivalence between the linear and the non-linear models. It is used the MFIX computational code to perform numerical simulations of the dynamics of gas-solid systems. It is analyzed the processes of fluidization, mixing and particle segregation and the influence of drag correlations. The proposed approach for normal spring stiffness coefficient is applied in the numerical simulations of two problems: single freely falling particle and bubbling fluidized bed. The results were compared with numerical and experimental data from literature.
Lista de Figuras
Lista de Tabelas
Lista de Abreviaturas e Siglas
Lista de Símbolos
1 Introdução 27
1.1 Aplicações e modelagem hidrodinâmica dos escoamentos gás-sólido . 27
1.2 Objetivos da pesquisa . . . 29
1.2.1 Objetivo geral . . . 29
1.2.2 Objetivos específicos . . . 30
1.3 Organização da tese . . . 32
2 Revisão bibliográfica 35 2.1 O modelo Eulerinao-Euleriano . . . 36
2.2 O modelo Euleriano-Lagrangeano . . . 41
Discretos . . . 54
3.2.1 Cálculo da força de interação fluido-partícula e da força coesiva 56 3.2.2 Cálculo das forças de contato: modelo da esfera suave . . . . 59
3.2.2.1 Modelo linear . . . 62
3.2.2.2 Modelo Hertiziano . . . 70
3.2.2.3 Equivalência para o cálculo do coeficiente de rigidez de mola na direção normal . . . 76
4 Resultados 79 4.1 Estudo de mistura em leito fluidizado borbulhante . . . 79
4.1.1 Levantamento da curva de fluidização da areia e do sal . . . . 81
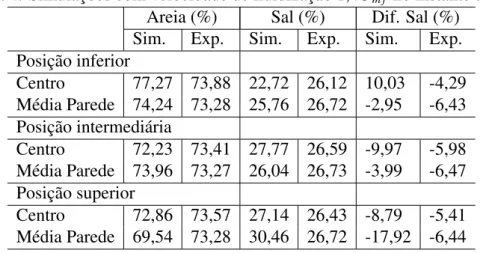
4.1.2 Mistura . . . 85
4.2 Estudo da influência da força de arrasto em sistemas monodispersos e polidispersos . . . 89
4.2.1 Sistemas monodisperso e polidispersos . . . 91
4.2.2 Segregação em uma mistura binária . . . 96
4.3 Estudo de sistemas coesivos . . . 100
4.3.1 Influência das constantes de Hamaker . . . 102
4.3.2 Efeitos de vibração em sistemas altamente coesivos . . . 107
4.4 Estudo do coeficiente de rigidez da mola . . . 111
4.4.1 Colisões partícula-partícula e partícula-parede . . . 111
5 Considerações finais 125
5.1 Conclusões . . . 125
5.2 Trabalhos futuros . . . 128
Referências 131
Apêndice A -- Derivação das equações de equivalência 141
Apêndice B -- Metodologia computacional 145
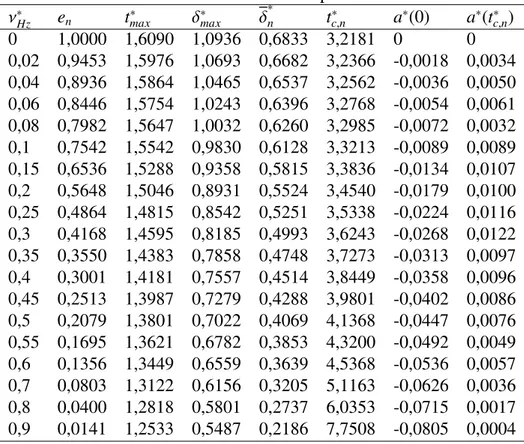
1 Esquema de colisão entre duas partículas no modelo esfera suave. . . 60
2 Sistema massa-mola-amortecedor nas direções normal e tangencial . . 61
3 Sobreposição adimensional (modelo linear mola-amortecedor). . . 67
4 Velocidade adimensional (modelo linear mola-amortecedor). . . 68
5 Aceleração adimensional (modelo linear mola-amortecedor). . . 68
6 Sobreposição adimensional (modelo HSD). . . 73
7 Velocidade adimensional (modelo HSD). . . 74
8 Aceleração adimensional (modelo HSD). . . 74
9 Geometria e condições iniciais e de contorno usadas na simulação con-siderando o sistema de coordenadas cilíndricas. . . 80
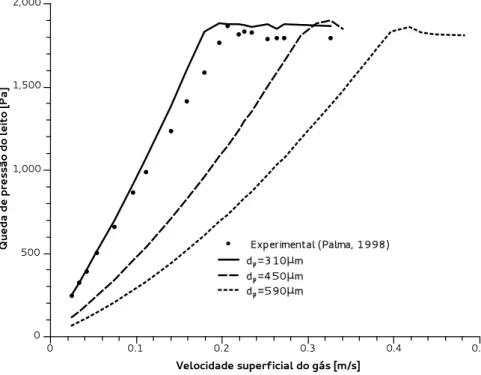
10 Curvas de fluidização da areia para partículas de diâmetros 310µm, 450µm e 590µm. . . 82
11 Curva de fluidização da areia para uma mistura homogênea. . . 83
12 Curva de fluidização da areia para partículas de 450µm e esfericidade 0,75. . . 84
disperso utilizando as correlações de arrasto de: (a) Syamlal, Rogers
e O’Brien (1993), (b) Ding e Gidaspow (1990), (c) Beetstra, Hoef e
Kuipers (2007), (d) Experimental de Hoomans (2001). . . 93
16 Imagens de simulação da bolha no instante t=0,5s em um leito
mono-disperso utilizando as correlações de arrasto de: (a) Syamlal, Rogers
e O’Brien (1993), (b) Ding e Gidaspow (1990), (c) Beetstra, Hoef e
Kuipers (2007), (d) Experimental de Hoomans (2001). . . 93
17 Imagens de simulação da bolha no instante t=0,4s em um leito
poli-dispersoso utilizando as correlações de arrasto de: (a) Syamlal, Rogers
e O’Brien (1993) (b) Ding e Gidaspow (1990), (c) Beetstra, Hoef e
Kuipers (2007), (d) Experimental de Hoomans (2001). . . 95
18 Imagens de simulação da bolha no instante t=0,5s em um leito
poli-disperso utilizando as correlações de arrasto de: (a) Syamlal, Rogers
e O’Brien (1993) (b) Ding e Gidaspow (1990), (c) Beetstra, Hoef e
Kuipers (2007), (d) Experimental de Hoomans (2001). . . 95
19 Geometria e condições de simulação para segregação. . . 97
20 Segregação de espécies (condição inicial): (a) simulação, (b)
experi-mental de Hoomans (2001). . . 98
21 Segregação de espécies no instante t=20s utilizando as correlações de
arrasto de: (a) Syamlal, Rogers e O’Brien (1993) (b) Ding e
Gidas-pow (1990), (c) Beetstra, Hoef e Kuipers (2007), (d) Experimental de
arrasto de:: (a) Syamlal, Rogers e O’Brien (1993) (b) Ding e
Gidas-pow (1990), (c) Beetstra, Hoef e Kuipers (2007), (d) Experimental de
Hoomans (2001). . . 99
23 Segregação de espécies: (a) t=0,0s, condição inicial para todos os
mo-delos, (b) t=40s utilizando o modelo de Syamlal, Rogers e O’Brien
(1993), (c) t=40s utilizando o modelo de Ding e Gidaspow (1990), (d)
t=40s utilizando o modelo de Beetstra, Hoef e Kuipers (2007). . . 100
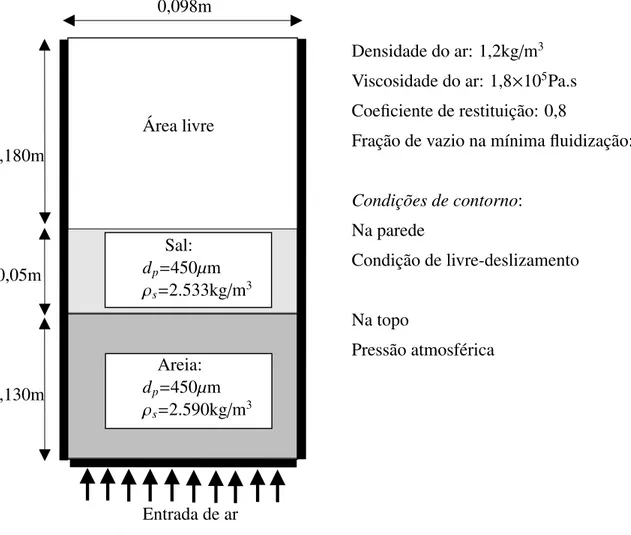
24 Geometria do leito bidimensional. . . 101
25 Queda de pressão no leito para partículas coesivas com constante de
Hamamker de A=10−12kg.m2/s2 considerando e sem considerar
corre-ção de Rumpf (1990) para asperidade. . . 103
26 Queda de pressão no leito para partículas coesivas com constante de
Hamamker de A=10−13kg.m2/s2 considerando e sem considerar
corre-ção de Rumpf (1990) para asperidade. . . 103
27 Queda de pressão no leito para partículas coesivas com constante de
Hamamker de A=10−14kg.m2/s2 considerando e sem considerar
corre-ção de Rumpf (1990) para asperidade. . . 104
28 Imagens de simulação para partículas coesivas (A=10−12kg.m2/s2) sem
considerar a correção de Rumpf (1990) para asperidade: (a) tempo
1,2s e Ug=0,3cm/s; (b) tempo 3,2s e Ug=0,8cm/s; (c) tempo 3,6s e
Ug=0,9cm/s; (d) tempo 4,2s eUg=1,1cm/s; (e) tempo 4,4s eUg=1,2cm/s.106
29 Imagens de simulação para partículas coesivas ( A=10−12kg.m2/s2)
considerando a correção de Rumpf (1990) para asperidade: (a) tempo
1,2s e Ug=0,3cm/s; (b) tempo 3,2s e Ug=0,8cm/s; (c) tempo 3,6s e
Hamamker de A=10 kg.m /s considerando e sem considerar
corre-ção de Rumpf (1990) para asperidade para de um leito convencional e
para leitos vibrados com frequência de vibração de 25Hz e amplitudes
de 0,03 e 0,1 repectivamente. . . 108
31 Queda de pressão no leito para partículas coesivas com constante de
Hamamker de A=10−14kg.m2/s2 considerando e sem considerar
corre-ção de Rumpf (1990) para asperidade para um leito convencional e
para leitos vibrados com amplitude de vibração de 0,1 e frequência de
10Hz, 25Hz e 50Hz respectivamente. . . 109
32 Imagens de simulação para partículas coesivas ( A=10−12kg.m2/s2)
considerando a correção de Rumpf (1990) para asperidade: (a) leito
convencional (Γ=0 e f=0); (b) leito vibrado Γ=0,03 e f=25Hz; (c)
leito vibradoΓ=0,1 e f=10Hz; (d) leito vibradoΓ=0,1 e f=25Hz; (e)
leito vibradoΓ=0,1 e f=50Hz. . . 110
33 Esquema de uma esfera individual em queda livre. . . 114
34 Cinemática da esfera (kn =7,94×104N/m e en = 0,9, para o modelo
LSD): centro da posição da esferay(linha sólida); velocidade da esfera
(linha pontilhada). . . 115
35 Cinemática da esfera (kn =7,77×104N/m e en = 0,7, para o modelo
LSD): centro da posição da esfera y (linha sólida); velocidade da
es-fera(linha pontilhada). . . 116
36 Geometria do leito tridimensional. . . 117
37 Coeficiente de rigidez da mola normal versus velocidade de impacto:
colisão partícula-partícula (linha sólida); colisão partícula-parede
(d)t=5,0s; (e)t=15,0s; (f)t=25,0s. . . 120
39 Porosidade: (a)16,5mm e (b)31,2mm. . . 121
40 Velocidade axial média do sólido no tempo em três alturas distintas do
1 Parâmetros adimensionais para o modelo linear mola-amortecedor. . . 69
2 Parâmetros adimensionais para o modelo HSD. . . 75
3 Simulações com velocidade de fluidização 1,4Um f no instante t=61s . 86
4 Simulações com velocidade de fluidização 1,4Um f no instante t=241s 86
5 Simulações com velocidade de fluidização 1,7Um f no instante t=61s . 87
6 Simulações com velocidade de fluidização 1,7Um f no instante t=241s 87
7 Simulações com velocidade de fluidização 2,0Um f no instante t=61s . 88
8 Simulações com velocidade de fluidização 2,0Um f no instante t=241s 89
9 Parâmetros usados nas simulações. . . 102
10 Coeficiente de rigidez da mola normal para o modelo LSD: colisão
partícula-partícula . . . 112
11 Coeficiente de rigidez da mola normal para o modelo LSD: colisão
com a parede . . . 112
12 Coeficiente de rigidez da mola normal para o modelo LSD: esfera em
queda livre . . . 114
DEM Método do Elementos Discretos
HSD Modelo Hertiziano amortecido não-linear - massa-mola-amortecedor
(Non-linear damped Hertzian spring-dashpot)
LFB Leito Fluidizado Borbulhante
LSD Modelo linear mola-amortecedor (Linear spring-dashpot)
MFIX Multiphase Flow with Interphase eXchanges
NETL National Energy Technology Laboratory
A Constante de Hamaker [kg.m2/s2]
dpm Diâmetro da partícula [m]
=
Dsm Tensor taxa de deformação [s−1]
CDs Função de arrasto para uma partícula em um meio infinito
Cflm Coeficiente de fricção entre as fases sólidas
eml Coeficiente de restituição para colisão entre partículas sólidas
en Coeficiente de restituição na direção normal
g Campo gravitacional [m/s2]
g0lm Função de distribuição radial
I Momento de inérica de massa [kg.m2]
=
I Tensor unitário
Igm Força de interação entre a fase gasosa e a fase sólida [N/m3]
Iml Transferência da quantidade de movimento entre as fases sólidas [N/m3]
I2D Segundo invariante do tensor taxa de deformação [Pa]
kn Coeficiente de rigidez da mola na direção normal [N/m]
kt Coeficiente de rigidez da mola na direção tangencial [N/m]
m Massa de uma partícula [kg]
Pg Pressão da fase gasosa [Pa]
tr Traço da matriz
T Torque sobre as partículas [N.m]
tc,n Tempo de contato entre partículas [s]
vg Velocidade média local da fase gasosa [m/s]
vsm Velocidade média local da fase sólida [m/s]
V Velocidade individual de uma partícula sólida [m/s]
Vrm Correlação para a velocidade terminal da fase sólida [m/s]
X Posição de uma partícula [m]
βgm Coeficiente de arrasto da interface
δ Sobreposição entre partículas [m]
δmax Sobreposição máxima entre partículas [m]
δn Sobreposição média entre partículas [m]
#g Fração de vazio
#sm Fração volumétrica da fase sólida
ηn Coeficiente de amortecimento na direção normal
ηt Coeficiente de amortecimento na direção tangencial
θ Temperatura granular [m2/s2]
λg Viscosidade volumétrica da fase gasosa [kg/m.s]
λsm Viscosidade volumétrica da fase sólida [kg/m.s]
µg Viscosidade dinâmica do gás [kg/m.s]
ρsm Densidade do sólido [kg/m3]
=
σg Tensor das tensões para a fase gasosa [Pa]
=
σs Tensor das tensões para a fase sólida [Pa]
=
τg Tensor das tensões viscosas do gás [Pa]
=
τs Tensor das tensões viscosas do sólido [Pa]
1
INTRODUÇÃO
1.1 Aplicações e modelagem hidrodinâmica dos
escoa-mentos gás-sólido
A fluidização em escoamentos gás-sólido constitui uma das mais importantes
apli-cações industriais que envolvem escoamentos multifásico. Entre as variadas apliapli-cações
dos escoamentos gás-sólido, duas são mais representativas e importantes
economica-mente: os craqueadores catalíticos para conversão de frações pesadas de petróleo em
gasolina e os combustores de leito fluidizado para geração de energia térmica e elétrica.
Embora as reações químicas e os processos de transferência de calor influenciem
diretamente as taxas de conversão dos reatores catalíticos e a eficiência térmica de
instalações energéticas, estes são altamente influenciados pelos processos
hidrodinâ-micos, os quais determinam a distribuição espacial das fases e espécies envolvidas.
Como a hidrodinâmica é dominante nos processos de transporte de massa e energia
em certas escalas temporais e espaciais, é imprescindível o seu estudo e
compreen-são. Ainda na atualidade a compreensão dos processos hidrodinâmicos básicos que
acontecem em escoamentos multifásicos nas instalações industriais é incompleta e
in-suficiente.
Leitos fluidizados de escoamentos gás-sólido aparecem em diversas aplicações
in-dustriais, sendo um dos tipos os reatores de leito fluidizado borbulhante (LFB). Esses
leitos posssuem várias vantagens, tais como, mistura uniforme do particulado,
Devido às vantagens dos reatores de leito fluidizado, muitas pesquisas são dedicadas
à esta tecnologia. A maioria das pesquisas tem como objetivo quantificar e explicar o
comportamento das interações entre as fases no leito. Temas específicos destas
pes-quisa incluem análise do tamanho e distribuição das partículas, estudo das interações
entre as fases, velocidades de operação do leito, efeitos dos campos de pressão,
mode-lagem computacional, entre outros. O objetivo é a produção de modelos mais precisos
que permitirão projetar reatores melhores e mais eficientes, ampliando a sua utilização.
Os leitos borbulhantes são caracterizados por altas densidades de particulado, pelo
desenvolvimento de bolhas de gás que promovem a recirculação e a mistura, e pelo
processo de elutriação que promove o arrasto de particulados mais finos. A maior
parte do leito é formada de partículas cujas velocidades terminais são diferentes da
velocidade do gás. Uma característica dos leitos fluidizados gás-sólido é a presença de
bolhas, as quais afetam o desempenho do reator. Assim, é importante entender as suas
características e comportamento. Comumente pode-se definir bolhas como regiões
com pouco ou sem sólido.
Para a modelagem de escoamentos gás-sólido é necessário conhecer o grupo de
partículas sólidas que se pretender estudar. Existem grandes diferenças de
comporta-mento para cada tipo de partícula ou conjunto de partículas no interior de um leito.
Geldart (1973), classificou em quatro grupos distintos o comportamento de partículas
sólidas de acordo com algumas de suas propriedades de fluidização (diâmetro e
densi-dade). As partículas do grupo A são aeráveis e pouco coesivas. Os leitos apresentam
tanto uma fluidização uniforme, sem bolhas, bem como, uma fluidização borbulhante
(com o aumento da velocidade do gás). As partículas do grupo B apresentam
fluidi-zação borbulhante assim que a velocidade do gás atinge o ponto no qual as partículas
iniciam a suspensão. A expansão do leito e a mistura de partículas são moderadas. As
partículas do grupo C são relativamente muito pequenas e de difícil fluidização devido
atravessa o leito por canais abertos ou faz com que as partículas se movam como um
pistão. Essa dificuldade surge devido as forças entre as partículas serem maiores que
àquela exercida pelo fluido. As partículas do grupo D são maiores e exigem altas
velo-cidades para fluidizar, o que torna o regime mais turbulento e o resultado é uma mistura
não satisfatória.
Como o tamanho e a frequência das bolhas nos leitos são responsáveis pela
mis-tura, segregação de partículas e pelos processos de transferência de calor e massa no
leito, uma previsão precisa da dinâmica da bolhas em leitos fluidizados é uma questão
fundamental para o desenvolvimento dos modelos hidrodinâmicos. Com o
desenvol-vimento de algoritmos e de computadores mais velozes, a modelagem hidrodinâmica
de escoamento multifásiscos vem recebendo esforços significativos para o
desenvol-vimento de modelos mais precisos. Um aspecto importante no desenvoldesenvol-vimento do
modelo hidrodinâmico é a validação do modelo com dados experimentais confiáveis.
Medições da dinâmica de bolhas realizadas com partículas com propriedades bem
de-finidas (tamanho, forma, densidade, propriedades de colisão, entre outras), com a
geo-metria do leito bem definida e em uma escala de tempo curto são difícies de encontrar
na literatura.
1.2 Objetivos da pesquisa
1.2.1 Objetivo geral
O objetivo geral da presente pesquisa é investigar parâmetros físicos do modelo
de dois fluidos e do método dos elementos discretos através de um estudo teórico e de
1.2.2 Objetivos específicos
O foco principal da presente pesquisa é a modelagem do particulado através de
modelos contínuos e discretos com o objetivo de melhorar os modelos existentes na
literatura. A contribuição do trabalho é atribuída à quatro diferentes estudos:
(a) processo de mistura de um sistema particulado binário, composto por areia e
sal através do modelo Euleriano-Euleriano de duas fases separadas, com o objetivo
de observar o comportamento do leito em relação às velocidades de fluidização e a
homogeneidade da mistura.
(b) influência das correlações de arrasto em sistemas monodispersos (1 fase sólida)
e polidispersos (mais de 1 fase sólida) em leito fluidizado borbulhante. Aplicações
com partículas de tamanho uniforme dificilmente são encontradas em laboratórios e
nas práticas industriais. Geralmente as partículas pertencem a uma faixa de diâmetro e
densidade. Uma distribuição contínua de partículas pode influenciar o comportamento
de bolhas de gás, velocidade de mínima fluidização, gradientes de pressão entre
ou-tros parâmeou-tros. Para o estudo dos sistemas polidispersos uma função de distribuição
do particulado no leito foi implementada com o objetivo de fornecer uma
distribui-ção lognormal de partículas em uma determinada faixa de diâmetros. Uma rotina para
a mistura inicial das diferentes fases sólidas também foi implementada. Foram
re-alizadas simulações numéricas em um leito fluidizado borbulhante (monodisperso e
polidisperso com 10 fases sólidas) e também em um sistema de segregação (duas fases
sólidas).
(c) comportamento de partículas coesivas do grupo A de Geldart (1973),
avali-ando quais as dificuldades de fluidização e a existência de outros regimes como canais
e aglomerados no leito. O estudo foi estendido considerando os efeitos de asperidade
na superfície das partículas (RUMPF, 1990). O efeito de vibração na base do leito
necessário a confecção de leitos pequenos para suportar um pequeno número de
partí-culas e diminuir o tempo computacional. Também foi necessário a implementação de
rotinas para computar os efeitos de vibração na base do leito.
(d) Desenvolvimento de um novo método para o cálculo da rigidez da mola
du-rante o contato de forças normais modeladas por meio de um sistema
massa-mola-amortecedor no método dos elementos discretos (DEM). O método proposto baseia-se
na comparação da sobreposição (overlap) do deslocamento na direção normal durante
o contato (modelo de esfera suave) do modelo linear com modelos não-lineares. A
comparação é feita considerando uma sobreposição média, e também a sobreposição
máxima e o tempo de contato, entre as soluções analíticas do modelo linear e as
nu-méricas do modelo não-linear. As forças de contato são determinadas pelo modelo
de esfera suave. O modelo linear é descrito de forma dimensional e não-dimensional
com as soluções analíticas e correspondentes tabelas e gráficos dos parâmetros
cine-máticos na forma adimensional. Para o modelo não-linear, as forças conservativas são
calculadas usando a Teoria de contato de Hertz (HERTZ, 1882). O modelo não-linear
também é descrito com a apresentação de gráficos e tabelas. O novo método para a
determinação da rigidez da mola é aplicado para o contato de esferas de vidro.
Tam-bém são apresentados resultados para um problema dinâmico de uma esfera em queda
livre e de um leito fluidizado borbulhante. Nesse último caso, os resultados obtidos
são comparados com outros resultados numéricos e experimentais da literatura.
As simulações numéricas são realizadas através do código aberto MFIX
(Mul-tiphase Flow with Interphase eXchanges) de Syamlal, Rogers e O’Brien (1993)
desen-volvido pelo NETL (National Energy Technology Laboratory) dos Estados Unidos da
América. O código MFIX tem sido amplamente utilizado para simular a
hidrodinâ-mica, transferência de calor e reações químicas em sistemas granulares e fluido-sólido.
O código MFIX é escrito na linguagem de programação Fortran e está em constante
pu-blicados em periódicos científicos são incorporados e, também, é possível realizar
al-terações para suportar novos modelos. Existem diversas universidades e pesquisadores
vinculados ao desenvolvimento do referido código. Os cálculos realizados pelo
soft-ware MFIX nas formulações Euleriana-Euleriana e Euleriana-Lagrangeana fornecem
dados transientes com distribuições tridimensionais de pressão, velocidade,
tempera-tura, e frações de massa para espécies.
1.3 Organização da tese
O presente trabalho subdivide-se em cinco capítulos, sendo que no capítulo 1 é
apresentada uma breve descrição dos escoamentos gás-sólido, com ênfase às suas
prin-cipais características e aplicações.
O capítulo 2 apresenta uma revisão bibliográfica da literatura, estendendo os
estu-dos já desenvolviestu-dos sobre o tema. O objetivo dessa etapa é realizar uma atualização
bibliográfica destacando as principais aplicações e experimentos realizados em
siste-mas granulares e em sistesiste-mas fluido-sólido. Abordagens numéricas e procedimentos
computacionais de solução também são descritos.
O capítulo 3 apresenta a formulação matemática para o modelo
Euleriano-Euleriano de duas fases separadas. Nesta etapa são descritas as equações de balanço
considerando a abordagem Euleriana-Euleriana para ambas as fases. O tensor das
tensões para a fase sólida é avaliado com base na Teoria Cinética dos Escoamentos
Granulares, em que a temperatura granular é calculada por uma equação algébrica.
Apresenta-se também a formulação matemática para o Método dos Elementos
Discre-tos. São descritas as equações de balanço para a fase gasosa bem como a as equações
de Newton para a modelagem do particulado. O modelo da esfera suave utilizado para
a modelagem das forças de contato entre as partículas e o novo método proposto para
O capítulo 4 apresenta os resultados de simulação numérica obtidos a partir dos
modelos matemáticos descritos no capítulo 3. Os resultados são discutidos e
compara-dos com dacompara-dos numéricos e experimentais da literatura.
O capítulo 5 apresenta as conclusões do estudo desenvolvido e propostas para
2
REVISÃO BIBLIOGRÁFICA
A modelagem de sistemas particulados tem sido um importante foco de pesquisas
em todo o mundo, pois estes são bastante comuns na natureza, como quedas de gotas de
chuva, nevascas, formação de dunas, e também em processos industriais, como
seca-dores, reatores, na indústria farmacêutica e química, entre outros processos. Materiais
granulares consistem de um conjunto de partículas discretas podendo estar distribuídas
em um meio fluido. A diferença de escoamentos granulares e outros de mistura fluido
sólida é que a interação entre as partículas tem um papel fundamental no padrão de
escoamento.
Duas abordagens são possíveis para modelar sistemas particulados: contínua e
discreta. O enfoque discreto é usualmente mais acurado, pois descreve o movimento
de cada partícula usando as Leis de movimento de Newton, mas é restrito a um
nú-mero relativamente pequeno de partículas por limitações computacionais. O enfoque
contínuo usa a teoria cinética dos escoamentos granulares e é mais relevante para
apli-cações industriais que usam uma grande quantidade de sólido. Em problemas
gás-sólido, quando a fase fluida e a fase sólida são consideradas contínuas, o método é
chamado Euleriano-Euleriano ou modelo de dois fluidos. Quando a fase fluida é
con-siderada contínua e a fase dispersa como discreta, a abordagem é chamada
2.1 O modelo Eulerinao-Euleriano
O modelo Euleriano-Euleriano é geralmente obtido utilizando o procedimento de
médias de Euler, e constitui uma das principais formulações das equações de campo
macroscópicas para um sistema bifásico. O modelo é formulado considerando cada
fase em separado, em termos de um sistema de equações de conservação de massa,
quantidade de movimento, e energia. A dificuldade de aplicação deste modelo, em
escoamentos gás-sólido deve-se ao fato de que este tipo de escoamento caracteriza-se
pela presença de duas fases diferentes, e de interfaces que separam essas fases entre
si. Como ambas as fases interagem entre si, aparecem nas equações de campo termos
devidos a essa interação, que especificam os transportes de massa, quantidade de
movi-mento e energia através da interface. Essa ideia de descrever os leitos fluidizados como
modelo hidrodinâmico de dois fluidos existe desde a década de 60. Diversos autores
descreveram esse modelo na época, Davidson (1961), Jackson (1963), Murray (1965),
Collins (1965), Stewart (1987) e Anderson e Jackson (1967). O conjunto de equações
proposto por esses pesquisadores é muito difícil de se resolver, e soluções numéricas
apareceram posteriormente nos trabalhos de Gidaspow e Ettehadieh (1983), Syamlal e
O’Brien (1989), Bouillard, Gidaspow e Lyczkowski (1991), Gidaspow (1994), Sanyal
e Cesmebasi (1994), Boemer, Qi e Renz (1997), Kuipers et al. (1993), entre outros.
Nos escoamentos gás-sólido em leitos fluidizados existem regiões que são
caracte-rizadas pela cinética ou colisões do particulado, outras dominadas pelo atrito, e outras
pela combinação dos dois fatores. A contribuição aditiva dos efeitos cinéticos e
de-vido ao atrito no tensor das tensões do particulado foi estuda por Savage (1982) e
por Johnson e Jackson (1987). Os efeitos cinéticos são baseados na teoria cinética
dos escoamentos granulares que considera o efeito intersticial do gás (AGRAWAL et
al., 2001). Esta teoria baseia-se na formulação de Euler/Boltzmann e
correspondente-mente permite a obtenção de um modelo reológico teórico para a fase sólida, através
a ajuda de equações complementares (algébricas ou diferenciais). O tensor das
ten-sões cinético utiliza a temperatura granular que pode ser calculada de duas formas:
através de uma equação diferencial parcial adicional que representa o balanço da
ener-gia pseudo-térmica das flutuações das velocidades das partículas, isto é, uma equação
adicional para a temperatura granular, ou através de uma expressão algébrica para a
determinação da temperatura granular.
Os efeitos devido ao atrito são caracterizados por um modelo de escoamento
quase-estático proposto por Schaeffer (1987) e modificado por Srivastava e
Sunda-resan (2003) para contabilizar flutuações no tensor taxa de deformação. Neste regime,
o tensor das tensões pode ser descrito com base no estudo da mecânica dos solos
(GO-ODMAN; COWIN, 1972; TüZüN et al., 1982; JENIKE, 1987; SCHAEFFER, 1987).
Muitos trabalhos têm sido realizados considerando essa abordagem de modelo de dois
fluidos por exemplo, Tsuo e Gidaspow (1990), Sun e Gidaspow (1999),
Cabezas-Gó-mez et al. (2008), entre outros oferecendo resultados razoáveis da hidrodinâmica do
escoamento. Recentemente, um modelo constitutivo com microestrutura para o
esco-amento de materiais granulares foi desenvolvido por Sun e Sundaresan (2011). Uma
revisão de escoamentos em materiais granulares é realizado no trabalho de Campbell
(2006).
Benyahia (2008) realizou um estudo com o objetivo de validação de duas
teo-rias contínuas de modelagem do contato por fricção do escoamento. De acordo com
Benyahia (2008), teorias cinéticas granulares são válidas para ambos os regimes:
esco-amento cinético (diluído) e escoesco-amento denso colisional (intermediário), para o caso
em que o contato entre as partículas colidindo seja instantâneo. Formulações
elabora-das através de observações experimentais da mecânica dos solos têm sido
tradicional-mente usadas em modelos contínuos para escoamentos granulares densos dominados
por contato duradouro entre as partículas. A teoria do contato por atrito, somente é
não fornece resultados acurados. Melhores previsões são obtidas usando uma teoria
de contato por atrito que se estenda ao regime de escoamento intermediário abaixo do
empacotamento onde ambos os contatos entre as partículas estão presentes, isto é, o
colisional e o duradouro.
As forças interfaciais do modelo de dois fluidos incluem a força de arrasto, a força
de sustentação, a força de massa virtual, entre outras (ENWALD; PEIRANO;
ALMS-TEDT, 1996). Nas equações de escoamentos de duas fases, devido a grande diferença
de densidades, as forças interfaciais são menos significantes, exceto a força de arrasto,
cuja consequência é que em diversas simulações somente a força de arrasto é
conta-bilizada. Geralmente a força de arrasto atuando em uma partícula em um escoamento
fluido-sólido pode ser representada pelo produto do coeficiente de transferência da
quantidade de movimento pela velocidade de deslizamento entre as duas fases.
Um dos primeiros trabalhos para o cálculo desse coeficiente foi proposto por
Ri-chardson e Zaki (1954). Wen e Yu (1966) estenderam o trabalho desses autores
apre-sentando uma correlação para grandes valores das frações de vazio. Ding e Gidaspow
(1990) apresentam o cálculo do coeficiente de arrasto em função da fração de vazio, e
compondo duas teorias: a de Ergun (1952) que calcula para a região densa e a de Wen
e Yu (1966) que calcula para a região dispersa. Ding e Gidaspow (1990) torna a
corre-lação de arrasto descontínua na concentração de sólidos em que ocorre o chaveamento
entre as duas teorias, embora seja contínua para número de Reynolds. Fisicamente,
a força de arrasto é uma função contínua de ambos parâmetros: concentração de
só-lidos e número de Reynolds, portanto formulações contínuas para o coeficiente de
arrasto são necessárias para evitar problemas de convergência em simulações de leitos
fluidizados gás-sólido. Huilin et al. (2004) usaram uma função tangente inversa para
remover o problema da descontinuidade. Dahl e Hrenya (2005) usaram uma
interpo-lação linear. Syamlal, Rogers e O’Brien (1993) propuseram um modelo para o cálculo
em leitos fluidizados. Beetstra, Hoef e Kuipers (2007) derivaram um correlação para
coeficiente de arrasto na interface com base em simulações lattice-Boltzmann (LBM)
e válidos para um grande intervalo de Reynolds. A correlação proposta por Beetstra,
Hoef e Kuipers (2007) oferece um fator de correção para o modelo de arrasto indicado
para uso em sistemas polidispersos. Beetstra, Hoef e Kuipers (2007) avaliaram
segre-gação de espécies em um leito fluidizado borbulhante com duas fases sólidas distintas
e encontraram bons resultados. Existem na literatura inúmeros trabalhos e correlações
sobre o coeficiente de arrasto na interface. Um estudo detalhado sobre as diversas
cor-relações para cálculo do coeficiente de arrasto é apresentado por Du et al. (2006) e
também por Wang et al. (2009).
Gidaspow (1994) publicou um livro que descreve detalhadamente o modelo de
dois fluidos, as equações constitutivas para o particulado, e também a teoria cinética
dos escoamentos granulares. Um artigo clássico da teoria da obtenção das equações
médias de escoamentos de duas fases e também das relações constitutivas é descrito por
Enwald, Peirano e Almstedt (1996). Ishii e Hibiki (2011) apresentam uma descrição
do modelo de dois fluidos e das equações de fechamento desse modelo aplicável a
escoamentos não-reagentes. A modelagem e entendimento das equações constitutivas
de fechamento são importantes porque regem os fenômenos que ocorrem na interface
entre as fases. Mesmo em aplicações de escoamento granulares onde ocorrem regiões
diluídas de sólidos é possível encontrar outras regiões que são densas e em que o atrito
é relevante.
Na discretização das equações do modelo contínuo é necessário definir um
es-quema apropriado para análise dos termos convectivos. Um eses-quema numérico para a
solução do modelo de dois fluidos é o método dos volumes finitos aplicado ao sistema
de equações diferenciais parciais que envolvem as fases. A escolha do esquema
numé-rico é muito importante pois pode levar a resultados não-físicos e totalmente diferentes
Existem diversas aproximações para os termos convectivos das equações de
con-servação, entre as quais se destacam os esquemas de primeira ordem tais como o FOUP
(First Order Upwind) de Courant, Isaacson e Reeves (1952), HYBRID de Spalding
(1972). Embora esses esquemas de primeira ordem tenham sido muito empregados
por serem incondicionalmente estáveis, eles introduzem uma viscosidade numérica
que suaviza a solução. Os esquemas de alta ordem, como por exemplo, o de segunda
ordem SOU (Second Order Upwind) de Price, Varga e Warren (1966) e o de terceira
ordem QUICK (Quadratic Upstream Interpolation for Convective Kinematics) de
Leo-nard (1979) melhoram a precisão dos cálculos. Entretanto, esses esquemas apresentam
problemas quanto à limitação, ou seja, as soluções podem apresentar oscilações
não-físicas nas descontinuidades.
Diversas pesquisas pretendem obter esquemas de alta ordem e limitados.
Geral-mente os esquemas propostos se baseiam em dois conceitos: as restrições TVD (Total
Variation Diminishing) e a abordagem em variáveis normalizadas. Este conceito
nor-maliza as variáveis e também a sua variação no sentido do escoamento. Os esquemas
que satisfazem as restrições TVD apresentam soluções livres de oscilações e
conver-gentes. Usualmente, os esquemas TVD são utilizados em escoamentos compressíveis
em que as variáveis convectivas sofrem mudanças bruscas no gradiente ou no caso de
surgimento de descontinuidades. Um exemplo de esquema TVD é o esquema MUSCL
(Monotonic Upstream Scheme for Conservation Laws) de Leer (1979) em que foi
ob-tida precisão espacial de segunda ordem e o esquema Superbee de Sweby (1984). Para
problemas estacionários, o esquema SHARP (Simple High-Accuracy Resolution
Pro-gram) de Leonard (1988), e o esquema SMART (Sharp and Monotonic Algorithm for
Realistic Transport) de Gaskell e Lau (1988) formulados no contexto de variáveis
nor-malizadas, são limitados e possuem um bom desempenho.
Utilizando os conceitos TVD e NVD, Song et al. (2000) construíram um esquema
Coeficient Ensuring Boundedness). Resultados numéricos para alguns problemas de
convecção mostraram que este esquema possui a habilidade do esquema QUICK em
reduzir a difusão numérica sem introduzir oscilações. Entretanto, segundo Alves,
Oli-veira e Pinho (2003), o esquema WACEB possui problemas de convergência para
esco-amentos viscoelásticos. Eles propuseram um esquema para esses tipos de escoesco-amentos
denominado CUBISTA (Convergent and Universally Bounded Interpolation Scheme
for Treatment of Advection) baseado em restrições TVD e associado ao número de
Courant.
Guenther e Syamlal (2001) investigaram os efeitos de difusão numérica das
equa-ções do escoamento gás-sólido em um leito fluidizado borbulhante, utilizando as
bo-lhas formadas em um leito fluidizado como uma métrica para comparar diversos
es-quemas de discretização dos termos convectivos. As bolhas preditas com o esquema
de primeira ordem apresentaram uma forma não-física pontiaguda. Segundo os
au-tores, métodos de alta ordem, como SMART e o Superbee, produziram bolhas mais
realísticas, com uma forma arredondada. Souza-Braun et al. (2010) investigaram a
in-fluência de esquemas numéricos e das malhas no perfil das bolhas, e concluíram que o
esquema Superbee ou possíveis esquemas baseados no Superbee são mais adequados
para os estudos de escoamentos granulares ou gás-sólido. Recentemente, Correa et al.
(2013) utilizaram o esquema EPUS (Eight-degree Polynomial Upwind Scheme) para
investigar a formação de bolhas e independência de malha em leitos fluidizados
borbu-lhantes. Portanto, a técnica numérica pode influenciar na solução do problema e, para
cada tipo de aplicação, um determinado esquema pode-se adequar melhor.
2.2 O modelo Euleriano-Lagrangeano
Com o rápido e amplo desenvolvimento de técnicas de simulação e também da
in-formática, a abordagem Euleriana-Lagrangiana para modelagem de sistemas
contínua como no modelo de dois fluidos, porém para a fase sólida, o movimento
in-dividual de cada partícula é calculado através das Leis de Newton.
Alder e Wainwright (1957) foram os pioneiros na abordagem discreta de sistemas
particulados através da introdução do método da Dinâmica Molecular como uma
meto-dologia de estudo para comportamento macroscópico de partículas. As técnicas de
Di-nâmica Molecular podem ser adaptadas para modelos discretos de partículas incluindo
as interações partícula-partícula, sendo essa abordagem chamada de Método dos
Ele-mentos Discretos (DEM - Discrete Element Method). Esse método tem sido aplicado
em diversas áreas, por exemplo, mecanismos geotécnicos por Cundall e Strack (1979),
tecnologia de transporte pneumático por Tsuji, Tanaka e Ishida (1992), segregação de
materiais por Ketterhagen et al. (2007), escoamento em partículas coesivas por
We-ber (2004), misturas em leitos gás-sólidos por Rhodes et al. (2001). Popken e Cleary
(1999) compararam a TCEG e esquemas de elementos discretos para a modelagem
granular de escoamentos de Couette. Eles relataram que os dois métodos apresentam
resultados semelhantes tanto qualitativamente quanto quantitativamente. Limtrakul et
al. (2003) também realizaram simulação bidimensional em leito fluidizado, com o
ob-jetivo de estudar os efeitos do tamanho e da densidade das partículas e descobriram que
a melhor mistura ocorre em leitos onde as partículas possuem tamanho próximo uma
das outras e também onde a diferença de densidade é pequena. Li e Kuipers (2003)
estudaram o efeito de várias correlações de arrasto em estruturas de escoamento
forma-das em leitos fluidizados e relataram que as correlações com não-dependência linear
sobre a fração de vazio apresentam a formação de aglomerados no particulado mais
fino. Eles também relataram os efeitos de colisões inelásticas entre as partículas.
Ta-naka, Mituji e Takahashi (1996) utilizaram DEM para estudar condições de mistura e
de segregação. Uma abrangente revisão da literatura é feita no trabalho de Zhu et al.
(2008), a qual resume os principais estudos baseados na simulação discreta de
O método dos elementos discretos para a fase sólida pode ser combinado com o
da fase gasosa que é considerada contínua. A influência hidrodinâmica das partículas
sobre o gás aparece principalmente na interface de arrasto. Outros efeitos tais como
transferência de calor e massa também podem ser analisados quando se utiliza o
mé-todo de elementos discretos. Na simulação numérica usando a técnica DEM, a análise
global do sistema granular é obtida através da análise individual de cada partícula. Dois
modelos podem ser usados na modelagem do particulado quando se utiliza o DEM: o
modelo de esfera rígida e modelo de esfera suave.
O modelo de esfera rígida é usado em regimes diluídos, onde a fase sólida é
bas-tante dispersa, as colisões entre partículas é análoga a dinâmica molecular em gases
rarefeitos. Apesar das colisões entre as partículas serem pouco elástica, a energia é
fornecida ao sistema através da aceleração da partícula, gravidade, e até mesmo pelas
colisões com a fronteira. A maioria dos trabalhos publicados na literatura tem
con-siderado apenas colisões binárias em escoamentos de regime granular rápido, onde
as partículas movem-se em uma trajetória bem definida até que a colisão com outra
partícula ocorra. Essas interações entre as partículas são modeladas como colisões
instantâneas e o estado de pós-colisão é determinado a partir da dinâmica clássica
(CAMPBELL, 1982). Usando o modelo de esfera rígida as equações de movimento de
Newton consistem na força impulsiva em função do tempo atuando sob uma partícula.
As equações e descrição detalhada do modelo de esfera rígida podem ser
encontra-das em Campbell (1982) e Crowe, Sommerfeld e Tsuji (1998). O modelo de esfera
rígida foi utilizado no estudo de sistemas granulares pela primeira vez por Campbell
(1982). A partir de então, inúmeros trabalhos que utilizam esse modelo veem sendo
publicados na literatura. Hoomans et al. (1996) utilizaram o modelo de esfera rígida
para estudar fluxos de gases em leitos fluidizados gás-sólido para estudar os efeitos
da interação partícula-partícula sobre a formação de bolhas e segregação. O modelo
Kuipers e Swaaij (2001), em problemas de fluidização em altas pressões por Li e
Kui-pers (2002), no estudo de segregações em distribuições contínuas por Dahl e Hrenya
(2005), em efeitos de turbulência do gás por Zhou et al. (2004), em leitos fluidizados
circulantes por He et al. (2006), entre outros. Recentemente, Müller e Pöschel (2012)
apontaram algumas limitações do modelo de esfera rígida para a dinâmica granular,
dependendo do material e dos parâmetros do sistema.
Uma grande parte dos escoamentos granulares e dos sistemas gás-sólido
apresen-tam um regime denso, onde predomina o atrito e cujas partículas estão em contato
umas com as outras por um longo período de tempo. O modelo da esfera suave,
pro-posto por Cundall e Strack (1979) é o mais recomendável para tais regimes. Nesse
modelo, as partículas se sobrepõem a uma pequena distância e as forças de contato
são calculadas com base no histórico de deformação usando um mapeamento entre
essas forças e sistemas dinâmicos. Um estudo detalhado sobre impacto é descrito no
livro de Goldsmith (1960), e o mecanismo elástico durante a colisão é modelado pela
teoria de Hertz (1885). Timoshenko e Goodier (1970) fornecem uma apresentação
clássica da teoria da elasticidade, cujo princípio é que a energia perdida durante o
impacto pode ser associada com mecanismos de amortecimento durante o período de
contato. Simo e Hughes (1997) apresentam conceitos teóricos de inelasticidade, uma
formulação numérica e também uma descrição computacional de algoritmos clássicos
de modelos de plasticidade, viscoplasticidade e viscoelasticidade. Diversos esquemas
tem sido propostos na literatura para modelar as forças de contato, como o de Walton
e Braun (1986) que usam duas constantes elásticas diferentes para modelarem a
ener-gia de dissipação nas direções normal e tangencial. Hunt e Grossley (1975) discutem
o modelo de Kelvi-Voigt e introduzem um novo termo de amortecimento não-linear
para o impacto entre corpos sólidos. Yigit, Ulsoy e Scott (1990) comparam modelos
mola-amortecedor com modelos de impacto utilizando dados experimentais de vigas
Em escoamentos gás-sólido, o modelo de esfera suave possibilita a análise de
al-gumas interações entre as partículas e entre partículas e parede, que não podem ser
ob-tidas no modelo de esfera rígida. O modelo dinâmico linear massa-mola-amortecedor
para o cálculo das forças de contatos é amplamente utilizado nas simulações DEM,
como por exemplo, em Haffe Werner (1986), Hoef et al. (2006), Garg et al. (2010),
Benyahia e Galvin (2010), Gopalakrishnan e Tafti (2013), entre outros. Um motivo
para isso é que o modelo linear é simples, e possui solução analítica para os
parâme-tros de colisão. Além disso, o modelo linear é computacionalmente mais econômico
comparado aos modelos não-lineares. No modelo linear, precisa-se especificar os
va-lores dos coeficientes de rigidez da mola e de amortecimento. Shäfer, Dippel e Wolf
(1996) descrevem que, em princípio, o modelo linear não tem parâmetros livres uma
vez que os coeficientes de rigidez da mola e de amortecimento podem ser ajustados
pelos coeficiente de restituição normal e pela duração do contato obtidos de valores
experimentais em determinadas faixas de velocidade. As relações para os coeficientes
de rigidez e de amortecimento podem ser derivadas como uma função do coeficiente de
restituição e duração do contato (ver Hoef et al. (2006) e Shäfer, Dippel e Wolf (1996)).
Stevens e Hrenya (2005) discutem um critério para escolher valores típicos dos
parâ-metros de entrada (coeficiente de rigidez e coeficiente de amortecimento) baseado em
uma equivalência do tempo de colisão.
No modelo linear, se somente estiver disponível o valor para o coeficiente de
resti-tuição normal, pode-se calcular o coeficiente de amortecimento usando uma expressão
analítica. O valor do coeficiente de rigidez para o modelo linear pode ser estimado de
outros experimentos numéricos ou outra abordagem como uma equivalência de
mo-delos lineares com não-lineares. Na literatura, existem diversos momo-delos não-lineares
para a estimativa dos parâmetros de colisão durante o impacto normal, por exemplo,
Tsuji, Tanaka e Ishida (1992), Hunt e Grossley (1975), Kuwabara e Kono (1987). A
e o coeficiente de rigidez não-linear é estimado nas propriedades dos materiais como
módulo de Young e coeficiente de Poisson. A diferença básica entre esses modelos é
o cálculo da força de amortecimento não-conservativa. Tsuji, Tanaka e Ishida (1992)
consideram uma força de amortecimento proporcional a raiz quarta da sobreposição
das partículas (overlap) na simulação de partículas não coesivas em um duto
horizon-tal. Hunt e Grossley (1975) consideram um força contínua no início e final do contato.
Kuwabara e Kono (1987) propuseram uma força de amortecimento proporcional a raiz
quadrada da sobreposição das partículas para a colisão de partículas esféricas
visco-elasticas. Existem vários trabalhos que apresentam uma equivalência entre o modelo
linear e modelos não-lineares. Lan e Rosato (1995) usam uma energia máxima
equi-valente para a avaliação da rigidez linear, assumindo que a energia cinética incidente
é armazenada como energia de deformação elástica Hertiziana e a rigidez da mola é
obtida quando a energia não-linear é igualada à linear. Lan e Rosato (1997) usam uma
sobreposição limite para determinar o coeficiente de rigidez. O valor da rigidez linear
é associada com uma sobreposição máxima baseada em uma porcentagem do diâmetro
da partícula. Dury e Ristow (1997) também determinam um valor da rigidez linear de
mola baseado em uma sobreposição limite calculada com um porcentagem da soma
dos raios de duas partículas. Buchholtz e Pöschel (1994) relacionam a rigidez linear
com o Módulo de Young caracterizando uma restituição elástica das esferas.
Anty-pov e Elliott (2011) mapeiam o modelo não-linear ao linear ajustando as constantes
lineares com as não-lineares.
Além da força gravitacional, a força coesiva influência determinados tipos de
par-tículas em meios específicos. Essa força aparece em alguns sistemas granulares e em
leito fluidizado. A presença da coesão pode afetar esses escoamentos influenciando as
velocidades de mínima fluidização, comportamento de segregação, surgimento de
ca-nais, podendo até levar a perda de fluidização do leito. Forças de coesão podem surgir
brid-ging”, forças eletrostáticas e forças magnéticas (VISSER, 1989) e (SEVILLE;
WIL-LET; KNIGHT, 2000). Trabalhos que incluem coesão em simulações Langrageana
veem sendo publicados na literatura. Mikami, Kamiya e Horio (1998) incorporaram
um modelo coesivo “liquid bridging” para uma simulação de leito fluidizado. Os
re-sultados ilustram o aumento da pressão na velocidade de mínima fluidização para
par-tículas molhadas em relação ao sistema com parpar-tículas secas. Rhodes et al. (2001)
utilizaram o mesmo leito fluidizado de Mikami, Kamiya e Horio (1998), e
incorpora-ram um modelo de coesão em que as forças de coesão são calculadas apenas quando
as partículas estão em contato físico. A magnitude da força de coesão é definida como
uma constante igual a um múltiplo inteiro do peso das partículas. Mais recentemente,
Wang e Rhodes (2004) desenvolveram novos parâmetros para quantificar a fluidez do
leito fluidizado. Usando tais parâmetros, como a mobilidade da partícula e a
veloci-dade média das partículas, os autores definiram critérios quantitativos para a transição
de partículas do grupo A de Geldart para partículas do grupo C. Xu et al. (2002)
im-plementaram um modelo para as forças de van der Waals em uma simulação de leito
fluidizado, cujos resultados mostraram a formação de força estática dentro do leito.
Posteriormente Ye, Hoef e Kuipers (2004) incorporaram as forças de van der Waals
no modelo discreto da esfera suave utilizando a teoria Hamaker e observaram o típico
comportamento dos sistemas coesivos, tais como, canais no leito e formação de
aglo-merados. Tatemoto, Mawatari e Noda (2005) estudaram os efeitos de coesão em uma
simulação em leito vibro-fluidizados, examinando o efeito da frequência de vibração,
3
METODOLOGIA
3.1 O Modelo Euleriano-Euleriano de duas fases
sepa-radas
Nesta seção é apresentada a formulação Euleriana-Euleriana clássica que permite
a obtenção do modelo denominado de duas fases separadas ou modelo de dois fluidos
(ENWALD; PEIRANO; ALMSTEDT, 1996). Nesta formulação, a fase fluida e a fase
sólida são consideradas como contínuas. Este modelo é geralmente obtido utilizando
o procedimento de médias, e constitui uma das principais formulações das equações
de campo macroscópicas para um sistema multifásico. O modelo é formulado
consi-derando cada fase em separado, em termos de um sistema de equações de conservação
de massa, quantidade de movimento e energia. Como ambas as fases interagem entre
si, as equações de campo contêm termos devidos à essa interação relacionados com o
transporte de massa, quantidade de movimento e energia através da interface.
A seguir são descritas as equações gerais médias, em condições isotérmicas e sem
reações químicas, para um sistema gás-sólido, bem como, as leis de fechamento
ado-tadas neste trabalho.
A equação da conservação da massa para a fase gasosa é dada por:
∂
∂t(#gρg)+∇.
! #gρgvg
"
= 0 (3.1)
cada fase sólidama equação da conservação da massa é:
∂
∂t(#smρsm)+∇.(#smρsmvsm)=0 (3.2)
onde#g,ρgevgna equação (3.1), são respectivamente a fração de vazio, a densidade e
a velocidade para a fase gasosa. Na equação (3.2),#sm,ρsm evsm são a fração
volumé-trica, a densidade e a velocidade para am-ésima fase sólida.
A equação da quantidade de movimento linear para o gás é dada por:
∂ ∂t
! #gρgvg
"
+∇.!#gρgvgvg
"
=∇. σ=g+#gρgg− M
#
m=1
Igm (3.3)
onde g é a aceleração da gravidade, σ=g é o tensor das tensões da fase gasosa e Igm
representa as forças de interação entre o gás e a m-ésima fase sólida. O tensor das
tenões do gásσ=g, é dado por:
=
σg= −Pg
=
I +τ=g (3.4)
onde Pg representa a pressão hidrostática, e
=
I o tensor unitário que também pode ser
expresso, em notação indicial, através do delta de Kronecker. O tensor das tensões
viscosas,τ=g, é modelado assumindo a relação tensão/deformação para um fluido
New-toniano considerando a hipótese de Stokes:
=
τg=2#gµg
=
Dg +#gλgtr(
=
Dg)
=
I (3.5)
ondeD=g= 12
$
∇vg+
!
∇vg
"T%
é denominado tensor taxa de deformação, eµgeλgsão as
viscosidades dinâmica e volumétrica da fase gasosa, respectivamente.
Neste trabalho é considerado apenas empuxo e arrasto como força de interação
entre as fases gasosa e sólida. Portanto, o termoIgmé dado por:
Igm= −#sm∇Pg−βgm
!
vsm−vg
"
(3.6)
em que na equação (3.6) o primeiro termo do lado direito representa o empuxo e o
O coeficiente de arrasto na interface,βgm, pode ser modelado de acordo com
diver-sas correlações. Uma delas, proposta por Syamlal, Rogers e O’Brien (1993) é baseada
na medida da velocidade das partículas em leitos fluidizados na seguinte forma:
βgm =
3 4
#sm#gρg
Vrm2 dpm
CDs & Rem Vrm ' ( (
(vsm−vg
( (
( (3.7)
onde CDs corresponde ao coeficiente de arrasto de uma partícula esférica dada pela
relação de Valle (1948):
CDs =
0.63+4.8
, Vrm Rem 2 (3.8)
eVrmé a velocidade terminal da fase sólida. Essa velocidade é modelada pela
expres-são de Garside e Al-Dibouni (1977):
Vrm=0.5
&
A−0.06Rem+
0
(0.06Rem)2+0.12Rem(2B−A)+A2
'
(3.9)
ondeA=#g4.14eB=
0,8#1.28 se #
g ≤0.85
#2.65
g se #g >0.85
O número de Reynolds para a fase sólida é definido por:
Rem=
#gρg
( (
(vg−vsm
( ( (dpm
µg
(3.10)
A equação da quantidade de movimento linear para a fase sólida é dada por:
∂
∂t(#smρsmvsm)+∇.(#smρsmvsmvsm)=∇.
=
σsm +#smρsmg+Igm−
M
#
l=1,l!m
Iml (3.11)
A transferência da quantidade de movimento entre as fases sólidas,Iml, é
represen-tado por:
Iml = −βsml(vsl−vsm) (3.12)
cinética usada por Syamlal (1987):
βsml =
3 (1+elm)
!π
2 +Cf lmπ
2 8
"
#slρsl#smρsm
!
dpl+dpm
"2
g0lm|vsl−vsm|
2π!ρsld3pl+ρsmd3pm
" (3.13)
onde elm é o coeficiente de restituição e Cf lm é o coeficiente de fricção entre a m
-ésima fase sólida e al-ésima fase sólida. De acordo com Lebowitz (1964), a função de
distribuição radialg0lm para uma mistura de esferas rígidas é:
g0lm =
1
#g
+ 3dpldpm
#g2(dpl+dpm) M
#
λ=1 #sλ dpλ
(3.14)
O tensor das tensões da fase sólidaσ=smé formulado baseado nos estudos de
Syam-lal, Rogers e O’Brien (1993), onde a teoria cinética dos escoamentos granulares
des-crita por Jenkins e Savage (1983) usada para escoamentos dispersos (rápidos) e a teoria
do estado crítico de Schaeffer (1987) usada para escoamentos densos (lentos) são
com-binadas por meio de uma chave no ponto de compactação crítico para a mínima
fluidi-zação, alternando a formulação do tensor das tensões da fase entre as duas diferentes
relações constitutivas:
=
σs=
−Ppsm
=
I +τ=sm p
se #g≤ #g∗
−Pvsm =I +τ=sm v
se #g> #g∗
(3.15)
onde, Psm é a pressão do sólido e
=
τsm é o tensor das tensões viscosas. Os sobrescrito p
é usado no caso do regime plástico e o sobrescritovpara o regime viscoso. A variável
#∗
g respresenta a fração de vazio na mínima fluidização.
Similarmente as funções usadas na teoria de escoamento plástico (JENIKE, 1987),
define-se uma função que permite certa compressibilidade da fase sólida,
respresen-tando assim, o termo da pressão do sólido para o regime de escoamento plástico:
Ppsm = #smP∗ (3.16)
onde P∗ é respresentado por uma lei empírica: P∗ = A!#∗
g−#g
"n
paraA=1025en=10 (SYAMLAL; ROGERS; O’BRIEN, 1993).
O tensor das tensões viscosas para o regime plástico é calculado usando a
formu-lação de Schaeffer (1987):
=
τsm
p
= 2µpsm
=
Dsm (3.17)
com µpsm = P
∗sinφ
2√I2D, onde φ é o ângulo de fricção interna e I2D representa o segundo
invariante do tensor taxa de deformaçãoD=sm:
I2D= 1 6
5
(Ds11−Ds22)2+(Ds22−Ds33)2+(Ds33−Ds11)2
6
+D2s12+D2s23+D2s31 (3.18)
Os termos do regime de escoamento viscoso na equação (3.15) são baseados em
uma forma modificada da teoria cinética de partículas esféricas, inelásticas e suaves
desenvolvida por Lun et al. (1984). A pressão da fase sólida no regime viscoso é
expressa por:
Pvsm = K1m#2smθ (3.19)
com,K1m =2(1+elm)ρsmg0lm
O tensor das tensões do sólido no escoamento viscoso é modelado considerando
um fluido Newtoniano:
=
τsm
v
=2µvsm
=
Dsm +λvsmtr
7 =
Dsm
8=
I (3.20)
O tensor taxa deformaçãoD=sm é dado por:
=
Dsm= 1 2
5
∇vsm+(∇vsm)T
6
(3.21)
A viscosidade volumétricaλv
sm é expressa por:
λvsm = K2m#sm
√
A constanteK2mé:
K2m = 4
3√πdpmρsm(1+elm)#smg0lm −
2
3K3m (3.23)
e a constanteK3mé:
K3m=
dpmρsm
√
π
6(3−elm)
9
1+ 2
5(1+elm)(3elm−1)#smg0lm :
+ 8dpmρsm#sm
10√π g0lm(1+elm) (3.24)
A viscosidade dinâmicaµvsm é dada por:
µvsm = K3m#sm
√
θ (3.25)
A temperatura granular θ é calculada, no presente trabalho, por uma expressão
algébrica de acordo com a equação de energia de Lun et al. (1984). Essa equação
algébrica para a temperatura granular é obtida assumindo que a energia granular é
dis-sipada localmente, desprezando as contribuições de difusão e de convecção,
permane-cendo somente os termos de dissipação e geração (SYAMLAL; ROGERS; O’BRIEN,
1993): θ =
−(K1m#sm+ρsm)tr(
=
Dsm)+
0
[(K1m#sm+ρsm)2tr2(
=
Dsm) 2#smK4m
+
+
0
4K4m#sm[2K3mtr(
=
Dsm2)+K2mtr2(
=
Dsm)]] 2#sK4m
(3.26)
onde, K4m=
12(1−e2lm)ρsmg0lm
dpm√π .
3.2 O Modelo Euleriano-Lagrangeano baseado no
Mé-todo dos Elementos Discretos
Um importante modelo discreto é o chamado Método dos Elementos Discretos
(DEM - Discrete Element Method), originalmente desenvolvido por Cundall e Strack
entre si por meio de forças de contato. O movimento translacional e rotacional de
cada partícula em um sistema é descrito pelas equações de movimento de Newton.
Simulações DEM fornecem informações cinemáticas e dinâmicas, como as trajetórias
e as forças transientes agindo sobre as partículas individualmente, o que é difícil de se
obter através de ensaios experimentais. O método DEM tem sido acoplado a dinâmica
dos fluidos computacional para descrever os escoamentos fluido-partículas (TSUJI;
KAWAGUCHI; TANAKA, 1993) o que torna possível o estudo de vários sistemas de
partículas em processos de engenharia.
Nesta seção, apresenta-se a formulação matemática para o modelo
Euleriano-Lagrangeano, que consiste em utilizar técnicas da dinâmica dos fluidos
computaci-onal combinadas com o método DEM. Nesta abordagem, o fluido (gás) é considerado
contínuo e é modelado através de um sistema de equações de conservação de massa
e quantidade de movimento (ver seção 3.1). No sistema particulado, cada partícula é
modelada individualmente através das Leis de Newton. A influência hidrodinâmica
das partículas sobre o fluido aparecem principalmente na interface através da força de
arrasto.
No modelo DEM apresentado, uma fase sólidamé representada porNmpartículas
esféricas, sendo que cada partícula possui diâmetro Dm e densidadeρm. Para um total
deMfases sólidas, o número total de partículas éN =AM
m=1Nm. No presente trabalho, as fases sólidas são diferenciadas de acordo com o diâmetro e a densidade.
O movimento individual de cada partículai, com massam(i)é calculado a partir da
segunda Lei de Newton:
m(i)d 2X(i)
dt2 = F (i)
total(t)=m
(i)g+F(i)
contato(t)+F
(i∈k,m) f luido(t)+F
(i)
coesiva(t) (3.27)
onde X(i) é a posição da partícula e g é a aceleração da gravidade. F(i)
contato é a força
de contato devido às colisões,F(i∈k,m)
f luido é a força de interação fluido-partícula (pressão+