PABLO GILBERTO FINI
AVALIAÇÃO DAS CONDIÇÕES DE CONTORNO DA
TEORIA DE HERTZ, COMPARANDO OS RESULTADOS
ANALÍTICOS E NUMÉRICOS A PARTIR DE SIMULAÇÕES
EM SOFTWARE DE ELEMENTOS FINITOS.
PABLO GILBERTO FINI
AVALIAÇÃO DAS CONDIÇÕES DE CONTORNO DA TEORIA
DE HERTZ, COMPARANDO OS RESULTADOS ANALÍTICOS E
NUMÉRICOS A PARTIR DE SIMULAÇÕES EM SOFTWARE DE
ELEMENTOS FINITOS.
Guaratinguetá
2013
Trabalho de Graduação apresentado ao
Conselho de Curso de Graduação em
Engenharia Mecânica da Faculdade de
Engenharia do Campus de Guaratinguetá,
Universidade Estadual Paulista, como parte dos
requisitos para obtenção do diploma de
Graduação em Engenharia Mecânica.
F498a
Fini, Pablo Gilberto
Avaliação das condições de contorno da teoria de Hertz, comparando os resultados analíticos e numéricos a partir de simulações em software de elementos finitos / Pablo Gilberto Fini – Guaratinguetá : [s.n], 2013. 73 f : il.
Bibliografia: f. 71-72
Trabalho de Graduação em Engenharia Mecânica – Universidade Estadual Paulista, Faculdade de Engenharia de Guaratinguetá, 2013.
Orientador: Prof. Dr. José Elias Tomazini Coorientador: Dr. Fernando de Azevedo Silva
1. Mecânica dos sólidos 2. Método dos elementos finitos 3. Simulação (Computadores) I. Título
PABLO GILBERTO FINI
ESTE TRABALHO DE GRADUAÇÃO FOI JULGADO ADEQUADO COMO
PARTE DO REQUISITO PARA A OBTENÇÃO DO DIPLOMA DE
“
GRADUADO EM ENGENHARIA MECÂNICA”
APROVADO EM SUA FORMA FINAL PELO CONSELHO DE CURSO DE
GRADUAÇÃO EM ENGENHARIA MECÂNICA
BANCA EXAMINADORA:
Prof. Dr. JOSÉ ELIAS TOMAZINI
Orientador/UNESP-FEG
Prof. Dr. FERNANDO AZEVEDO SILVA
UNESP-FEG
Eng. FELIPE ANTONIO CARREIRINHA MENDES
Membro Externo
DADOS CURRICULARES
PABLO GILBERTO FINI
NASCIMENTO 22/02/1987 – CHARQUEADA / SP
FILIAÇÃO
Aparecido Gilberto Fini
Maria Isabel Gadotti Fini
2008/2013
curso de graduação
Dedicatória
AGRADECIMENTOS
Primeiramente agradeço a Deus pela minha vida, sem ela nada disso seria
possível.
Agradeço a minha família por estar sempre ao meu lado e me dar suporte
nos momentos difíceis e por sorrir comigo em meus momentos de felicidade,
agradeço por todo o amor incondicional, que mesmo com a distância foi imenso.
Agradeço, em especial, ao meu irmão
Rodolfo Fini
de servir como
inspiração por toda sua dedicação aos estudos.
Agradeço a todos meus amigos, em especial,
Vinicius Rorato, Willian Doi
Fellipi Bortollin, Anderson Corrêa e Venâncio Castro
, por estarem sempre ao
meu lado vivendo desafios e alegrias durante todos esses anos.
Agradeço ao amigos do trabalho pela amizade, suporte nos momentos de
dificuldades e todo os ensinamentos diários.
EPÍGRAFE
“Alguém que nunca cometeu um erro, nunca tentou algo novo.”
FINI, P. G. Avaliação das condições de contorno da teoria de hertz, comparando os resultados analíticos e numéricos a partir de simulações em software de elementos
finitos. 2013. 73f. Trabalho de Graduação (Graduação em Engenharia Mecânica) –
Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual Paulista, Guaratinguetá, 2013.
RESUMO
O objetivo deste trabalho foi apresentar a comparação entre os resultados analíticos e numéricos buscando identificar as diferenças e comportamentos da variação das tensões principais e da pressão máxima de contato para diferentes configurações do modelo. Foram demostradas as equações analíticas da teoria de Hertz a partir das condições de contorno adotadas por ele e apresentado um passo-a-passo da elaboração do modelo indicando as dimensões geométricas, superfícies de contato, tipo de contato, formulação utilizada pelo software, tipo de malha, assim como as condições de contorno e de carregamento. Nos resultados, foram apresentadas as tensões calculadas analiticamente e comparadas com as tensões obtidas pelas simulações no software de elementos finitos, indicando as variações.
PALAVRAS-CHAVE: Teoria de Hertz, contato mecânico, não linearidade, método de
FINI, P. G. Evaluation of boundary conditions of the theory of Hertz, comparing
the analytical and numerical results from finite element simulations software.
2013. 73f. Graduate Work (Graduate in Mechanical Engineering) – Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual Paulista, Guaratinguetá, 2013.
ABSTRACT
The objective of this study was to present the comparison between analytical and numerical results trying to identify the differences and behaviors of the variation of the principal stresses and the maximum contact pressure for different model configurations. The analytical equations of the theory of Hertz from the boundary conditions adopted by him were differences are shown. A step-by-step of developing the model indicating the geometric dimensions, surface contact, type of contact, the formulation used by the software, type of mesh, as well as the boundary conditions and load was presented. In the results, the stresses calculated analytically and compared with the stresses obtained by the finite element simulation software indicating the changes have been made.
KEYWORDS: Hertz theory, mechanical contact, nonlinear, finite element method,
Lista de figuras
FIGURA 1-1:PINTURA ENCONTRADA EM EL-BERSHED, DATADA DE 1880A.C.A IMAGEM MOSTRA UM
ASSISTENTE COLOCANDO LUBRIFICANTE EM FRENTE A ESTATUA PARA REDUZIR O ATRITO. ... 15
FIGURA 2-1:PLANOS E EIXOS DE REFERÊNCIA. ... 18
FIGURA 2-2:IMAGEM DAS FOLGAS ENTRE AS LENTES. A) SEM CARREGAMENTO. B) SOB EFEITO DE CARREGAMENTO. ... 21
FIGURA 2-3:DESLOCAMENTO E DEFORMAÇÃO ENTRE OS CORPOS DEVIDO À APLICAÇÃO DE UM CARREGAMENTO. ... 26
FIGURA 2-4:CONTATO ENTRE DOIS CILINDROS, E SECÇÃO DO CONTATO DE COMPRIMENTO 2A COM UMA DISTRIBUIÇÃO DE PRESSÃO P(X). ... 27
FIGURA 4-1:CILINDRO SOBRE BASE PLANA E DIREÇÃO DE APLICAÇÃO DA FORÇA. ... 39
FIGURA 4-2:CILINDRO SOBRE A BASE CURVADA E DIREÇÃO DE APLICAÇÃO DA FORÇA. ... 40
FIGURA 4-3:IMAGEM DO DOIS CORPOS QUE COMPÕEM O MODELO NUMÉRICO ... 42
FIGURA 4-4:IMAGEM DO CORPO MEDIDAS VARIÁVEIS. ... 43
FIGURA 4-5:VARIAÇÃO DO RAIO DA BASE. ... 44
FIGURA 4-6:IMAGEM DO CILINDRO SUPERIOR. ... 45
FIGURA 4-7:DIVISÃO DAS SUPERFÍCIES PARA REFINAMENTO DA MALHA. ... 46
FIGURA 4-8:CONTATO (FRICTIONLESS) E FORMULAÇÃO (PURE PENALTY). ... 47
FIGURA 4-9:SUPERFÍCIE DE CONTATO E OBJETIVA. ... 47
FIGURA 4-10:IMAGEM DOS CORPOS COM MALHA DO TIPO MULTIZONE. ... 48
FIGURA 4-11: SUPERFÍCIES SEM CONDIÇÃO DE CONTORNO. ... 50
FIGURA 4-12: DIREÇÃO DA FORÇA APLICADA ... 51
FIGURA 4-13: SUPERFÍCIES INDICADAS COM CONDIÇÃO FRICTIONLESS DE CONTORNO. ... 52
FIGURA 4-14: BASE FIXA ... 52
FIGURA 5-1:REPRESENTAÇÃO DE DOIS TIPOS DE REFERENCIAS DOS CENTROS DAS SUPERFÍCIES CILÍNDRICAS, A IMAGEM A ESQUERDA (A) MOSTRA A DIREÇÃO QUANDO R1 E R2 TEM SENTIDO POSITIVO E IMAGEM A DIREITA (B) MOSTRA O VALOR DE R1 POSITIVO E R2 NO SENTIDO OPOSTO... 53
FIGURA 5-2:VARIAÇÃO DO RAIO RELATIVO EM FUNÇÃO DE R1 E R2 POSITIVOS. ... 54
Lista de símbolos
Deformação na direção do eixo . Deformação na direção do eixo .
Deformação na direção do eixo . Tensão na direção de
Tensão na direção de Tensão na direção de
Tensão cisalhante na direção e .
Deformação elástica na direção do eixo Deformação elástica na direção do eixo Deformação elástica na direção do eixo
Deformação por cisalhamento.
Coeficiente de poisson Modulo de elasticidade
Modulo de elasticidade transversal Coeficiente de atrito
Largura do contato Raio relativo
Raio do corpo 1.
Raio do corpo 2.
Força por unidade de metro. Coeficiente de
Coeficiente de Coeficiente de
Constante
Diferença entre superficies.
Raio equivalente Deslocamento.
Pressão máxima no contato
Pressão média
Tensão de Von Mises
sumário
1 INTRODUÇÃO. ... 14
1.1 EVOLUÇÃO DA MECÂNICA DO CONTATO. ... 15
1.2 OBJETIVOS ... 16
1.2.1 Objetivo geral ... 16
1.2.2 Objetivos específicos. ... 16
2 FUNDAMENTOS TEÓRICOS ... 17
2.1 ELASTIC HALF-SPACE ... 17
2.1.1 Tensões e deformações. ... 17
2.2 TEORIA DE HERTZ ... 20
2.3 SUPERFÍCIES NÃO CONFORMÁVEIS. ... 23
2.4 CONTATO BIDIMENSIONAL ENTRE SUPERFÍCIES CILÍNDRICAS. ... 27
2.4.1 Tensão nos corpos ... 30
3 MÉTODO DE ELEMENTOS FINITOS. ... 32
3.1 NÃO LINEARIDADE ... 32
3.2 CLASSIFICAÇÃO DO CONTATO EM GERAL. ... 33
3.3 MODELOS DE ANÁLISE. ... 33
3.3.1 Contato de elementos nó-para-nó ... 33
3.3.2 Superfície para superfície ... 34
3.3.3 Nó-para-superfície ... 35
3.4 DESCRIÇÃO DO CONTATO ... 36
3.4.1 Tipo de contato ... 36
3.4.2 Formulação de contato. ... 37
4 METODOLOGIA ... 39
4.1 ANALÍTICA ... 39
4.2 NUMÉRICA ... 41
4.2.1 Geometria ... 41
4.2.2 Contato ... 47
4.2.3 Malha ... 48
5 RESULTADOS. ... 53
5.1 ANÁLISE ANALÍTICA DA VARIAÇÃO DO RAIO RELATIVO. ... 53
5.2 LARGURA DO CONTATO ... 57
5.3 COMPARAÇÃODASTENSÕES PRINCIPAIS SOBRE O EIXO Z ... 59
5.3.1 Tensões na direção do eixo Z ... 59
5.3.2 Tensões na direção do eixo x ... 61
5.3.3 Tensões na direção do eixo Y ... 63
5.3.4 Tensões de von Mises ... 65
5.4 COMPARAÇÃO DA PRESSÃO MÁXIMA NA SUPERFICIE. ... 66
6 CONCLUSÃO ... 69
1 INTRODUÇÃO.
Contato mecânico é um tema da engenharia que estuda a deformação entre dois sólidos em contato um com o outro e fornece informações necessárias para o desenvolvimento de projetos seguros e economicamente viáveis. Os problemas de contato são o centro da mecânica dos sólidos, pois os principais métodos de aplicação de cargas são feitos através do contato entre dois ou mais corpos, e o resultado da concentração de tensão e deformação são frequentemente mais críticos nos pontos de contato (POPOV, 2010).
Os estudos são de total interesse em inúmeras aplicações, como por exemplo: embreagens, freios, pneus, luvas e rolamentos, motores a combustão, vedações e gaxetas, usinagem, conformações a frio, soldas ultrassônicas, contatos elétricos e térmicos entre outros. Essas aplicações estendem na análise de tensões dos elementos de contatos e juntas, sob a influência da lubrificação e desenvolvimento de matérias na aplicação em micro e nanotecnologia.
Os problemas de contato estão inteiramente relacionados ao atrito. Atrito é um fenômeno que tem interessado as pessoas por centenas de anos e até hoje permanece no meio do desenvolvimento de novos produtos e tecnologias. A Figura 1-1 mostra um exemplo do uso de fluidos lubrificantes antes do nascimento de cristo, no qual é possível observar uma pessoa, utilizando um jarro, jogando um fluido na frente do monumento que esta sendo arrastado.
Um exemplo clássico de contato é um contato roda-trilho, o qual interessa principalmente o estudo de resistência do material e as propriedades de transmissão de força. Contatos podem transferir força mecânica (parafusos), conduzem eletricidade ou calor, ou impedir o fluxo de materiais (selos).
superficial são comprimidos um ao outro, eles não apresentam contato em toda a sua superfície, mas apenas na distribuição áspera, ocorrendo assim a existência do contato atômico (LORENZ, 2012).
Figura 1-1: Pintura encontrada em El-Bershed, datada de 1880 A.C. A imagem mostra um assistente colocando lubrificante em frente a estatua para reduzir o atrito.
Fonte: (LORENZ, 2012)
1.1 EVOLUÇÃO DA MECÂNICA DO CONTATO.
A mecânica do contato clássica esta associada a Heinrich Hertz, 1880, é o resultado de seus estudos entre dois corpos elásticos com superfícies curvas constitui a base da mecânica do contato até hoje. Em sua teoria, Hertz não considerava qualquer interação atômica entre as superfícies, tais como as interações adesivas ou contatos próximos de Van der Walls (POPOV, 2010).
Toporov, desenvolveram outra teoria, teoria DMT, que além do contato adesivo entre as superfícies, ele também considera as forças de Van der Walls fora do regime de contato elástico, que dão origem a uma carga extra. A teoria simplificada de Van der Wall proposta por Bradley, leva em consideração apenas as forças de Van der Wall, negligenciando as deformações do material elástico.
Os trabalhos de Johnson e Derjagin (JKR e DMT) tiveram grande importância nos estudos de Bowden e Tabor, que representam a teoria mais avançada no estudo da mecânica do contato.
Em meados do século XX, Bowden e Tabor foram os primeiros a considerar a importância da rugosidade superficial nos problemas de mecânica do contato. Com a investigação da rugosidade superficial, eles encontraram que a área de contato aparente é menor que a área real de contato (POPOV, 2010) .
1.2 OBJETIVOS
1.2.1 Objetivo geral
Esse trabalho apresenta como objetivo geral avaliar o contato mecânico, presente entre duas superfícies cilindricas submetidas a uma força de compressão externa, identificando a divergência dos resultados das tensões de Hertz.
1.2.2 Objetivos específicos.
Analisar o comportamento físico e matemático do raio relativo, devido à relação dimensional entre os raios característicos de cada corpo.
Avaliar os resultados dos cálculos analíticos e numéricos das tensões principais e de von Mises do contato mecânico dentro dos limites do raio relativo devido à variação da aplicação de uma carga externa.
2 FUNDAMENTOS TEÓRICOS
2.1 ELASTIC HALF-SPACE
O termo “elastic half-space” é muito utilizado em soluções de problemas onde há dois ou mais corpos em contato e pode ser definido como sendo sólidos elásticos que em contato, apresentam uma deformação (na região de contato) suficientemente pequena, comparada à deformação linear apresentada na teoria da elasticidade (JOHNSON, 1994). Desta forma, inevitavelmente, as dimensões sobre o contato são pequenas comparadas com o raio de curvatura da superfície não deformada. As tensões se mantém altamente concentradas na área de contato e diminuem consideravelmente sua intensidade, ao ponto que se afastam do primeiro ponto de contato. Com isso, pode se dizer que os corpos têm suas dimensões grandes o suficiente, comparada com a dimensão do contato, e as tensões geradas no contato podem ser desprezadas, independentemente da geometria que esta fora do contato.
2.1.1 Tensões e deformações.
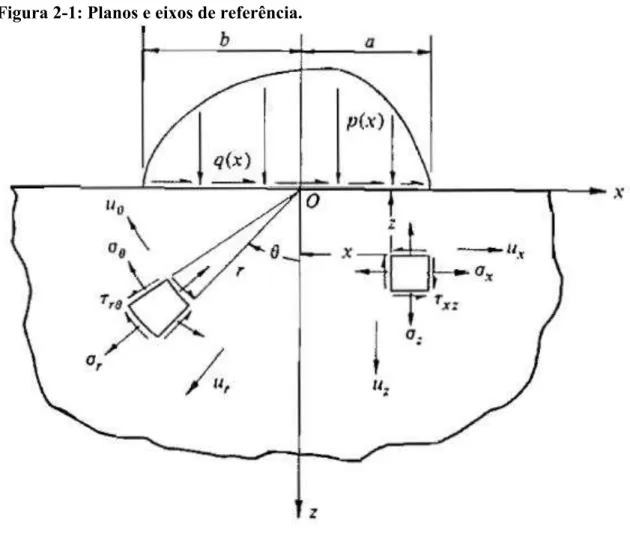
Para descrever as tensões e deformações que a superfície sofre devido a uma distribuição de carregamento, é necessário adotar algumas considerações. O plano de referência foi adotado como sendo o plano e o eixo que vai em direção ao centro do sólido como sendo o eixo . A força F é aplicada sobre um comprimento ao longo da direção de e é igual para todo valor de , ou seja, a faixa de força esta paralela e apoiada no eixo . Também, pode se considerar para estado de deformação plana na direção de desprezado ( .
A Figura 2-1 mostra a secção de um corpo meio elástico carregado em sua superfície com uma distribuição de pressão normal e uma força de tração
Figura 2-1: Planos e eixos de referência.
Fonte: (JOHNSON, 1994)
As equações de balanceamento e os cálculo das tensões e deformações são baseadas na teoria de elasticidade (TIMOSHENKO e GOODIER, 1951).
Equação de equilíbrio das tensões no sólido:
[1]
[2]
As componentes da deformação e devem ser compatíveis:
Onde cada componente da deformação específica pode ser relacionado com o deslocamento da seguinte forma:
[4]
[5]
[6]
Da condição de deformação plana tem-se que:
[7]
[8]
Pela Lei de Hooke, a resultante das componentes da deformação nos elementos submetidos às tensões normais aplicadas ( , e de compressão podem ser dadas da seguinte maneira (TIMOSHENKO e GOODIER, 1951):
[9]
[10]
[11]
A primeira condição diz que as tensões na superfície dos corpos ( ) fora da área de contato devem ser zero:
( ou [12]
A segunda condição diz que as tensões na superfície dos corpos dentro da região de contato é definido como:
[13]
[14]
2.2 TEORIA DE HERTZ
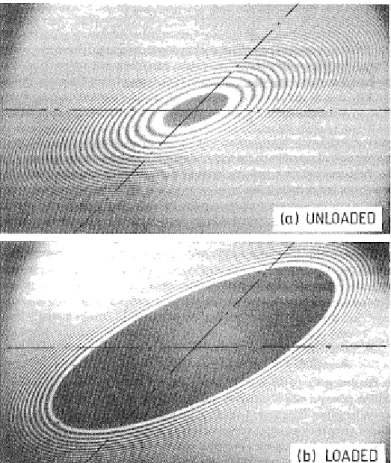
Figura 2-2: Imagem das folgas entre as lentes. a) sem carregamento. b) sob efeito de carregamento.
Fonte: (JOHNSON, 1994)
Devido às observações, Hertz supôs que a área de contato são elípticas, conforme observado na Figura 2-2, Hertz supôs que cada corpo pode ser considerado como um sólido elástico semi-infinito carregado sob uma pequena área elíptica na superfície.
Para essa simplificação ser valida é necessário que a dimensão significativa do contato seja muito menor que as dimensões características dos corpos e também, muito menor que o raio relativo da curvatura das superfícies (JOHNSON, 1994).
pequena (JOHNSON, 1994), comparada a deformação apresentada na teoria linear (TIMOSHENKO e GOODIER, 1951).
Outra condição feita por hertz é de que o contato entre as superfícies seja livre de atrito, isso implica que a única força aplicada no contato seja a normal. Entretanto, essa consideração possibilita dizer que as superfícies de contato não necessariamente devem ser planas, uma vez que a pressão de contato entre elas seja perpendicular às superfícies. Uma vez que a superfície entre o contato deve ser livre de atrito (μ=0), é possível afirmar que a força de tração apresentada na Figura 2-1 seja igual à zero. A força de tração é transmitida para a superfície devido o atrito entre os corpos.
[15]
Desta forma, é possível afirmar que a tensão de cisalhamento na superfície ( será igual à zero.
[16]
Denominando a dimensão significativa do contato por “ ”, o raio relativo entre as superfícies por “ ” e os raios significativo de cada corpo por “ ” e “ ” é possível simplificar as condições de Hertz da seguinte maneira:
1. As superfícies devem ser contínuas e indeformáveis, assim é possível afirmar que .
2. A deformação deve ser pequena, .
3. Cada corpo pode ser considerado como um “elastic half-space” .
4. As superfícies são livres de atrito , apenas carregamento normal à superfície .
problemas de contato, desta forma, para situações nas quais uma ou mais condições não são satisfeita, é viável a utilização de outros métodos na resolução do problema.
2.3 SUPERFÍCIES NÃO CONFORMÁVEIS.
O estudo do contato entre os corpos prevê as componentes das tensões e deformações de ambos os corpos na região de contato, tentando correlacionar e equacionar o comportamento da região de contato devido ao carregamento de compressão.
O contato inicial entre duas superfícies ocorre pontualmente ou linearmente, dependendo da geométrica dos corpos. Quando é inserida uma força compressiva sobre os corpos, ocorre uma deformação na região de contato, e assim os pontos próximos ao contato inicial se aproximam e entram em contato aumentando a região, formando assim, uma área.
Para se determinar o comportamento e a capacidade do corpo, devem ser feitas algumas considerações, nas quais as superfícies devem ser totalmente lisas, tanto em micro e macro escala. Quando analisada as superfícies em micro escala, deve-se desconsiderar qualquer descontinuidade, ou seja, ausência de falhas, assumindo que todos os pontos da área estão em contato. Quando analisada em macro escala, o perfil da superfície deve ser contínuo. Uma superfície contínua pode ser descrita por uma equação de segundo grau, na qual, após a segunda derivação, seja constante (JOHNSON, 1994).
[17]
[18]
[19]
Onde: e são os raios principais, máximo e mínimo. Deve- se lembrar, que as equações são deduzidas a partir da observação de que o contato entre as superfícies são elípticos.
Para um plano de simetria, a superfície do outro corpo pode ser determinada analogamente a equação anterior:
[20]
Uma vez conhecida a posição dos pontos de cada superfície, é possível determinar o espaçamento entre as superfícies reais, podem ser dados da seguinte maneira:
[21]
[22]
De modo generalizado, o espaçamento entre as superfícies podem ser escritas da seguinte forma:
[23]
onde e B= .
[24]
Uma vez desenvolvida a ideia generalizada para a área (elíptica) do contato entre as superfícies dos corpos, é possível adaptar o conceito para o contato cujas superfícies sejam definidas como sólidos de revolução e cilindros.
Quando aplicada uma força F de compressão entre dois cilindros, pode-se afirmar que e , portanto e . A região de contato que ocorrerá devido a deformação das superfícies é representada por uma superfície elíptica, onde o raio maior é muito maior que o raio menor, desta forma a região se aproxima de um retângulo de lado “ ” e comprimento”
”.
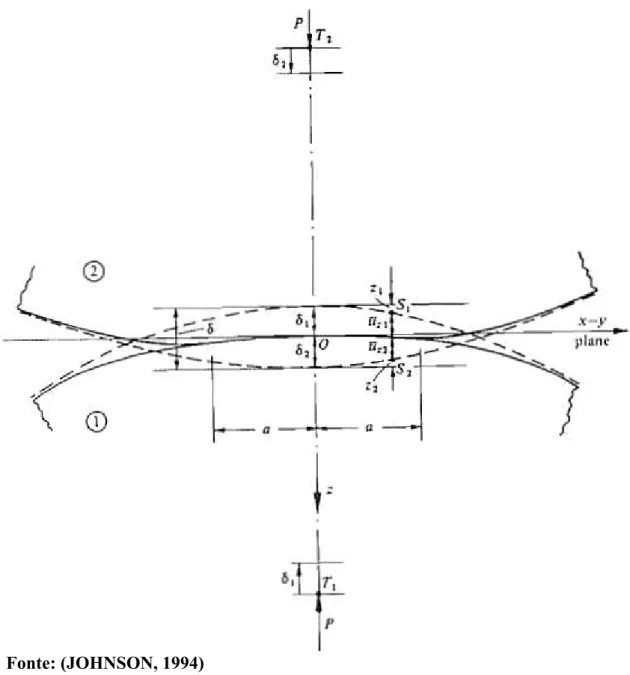
Figura 2-3: Deslocamento e deformação entre os corpos devido à aplicação de um carregamento.
Fonte: (JOHNSON, 1994)
A linha tracejada representa o deslocamento dos corpos sem deformação, neste caso, a figura mostra o deslocamento da superfícies paralelo ao eixo que pode ser medido pelas componentes e (ambos adotados como positivos). Após a deformação, se os pontos das equações e são coincidentes dentro do contato então, o contato pode ser descrito pela equação abaixo:
[25]
onde e são as coordenadas em comum das superfícies e projetadas no plano .
Qualquer outro ponto da superfície fora da área de contato (que não toque a superfície) deve satisfazer a seguinte condição:
[27]
2.4 CONTATO BIDIMENSIONAL ENTRE SUPERFÍCIES CILÍNDRICAS.
Neste item será abordado com maior precisão de detalhes o problema, que envolve as deformações e as tensões do contato entre corpos cilíndricos. Quando dois corpos cilíndricos cujos eixos do comprimento estão paralelos e alinhados com o eixo do sistema de coordenadas e então, aplicado uma força de compressão F por unidade de comprimento, o problema pode ser tratado como bidimensional (JOHNSON, 1994).
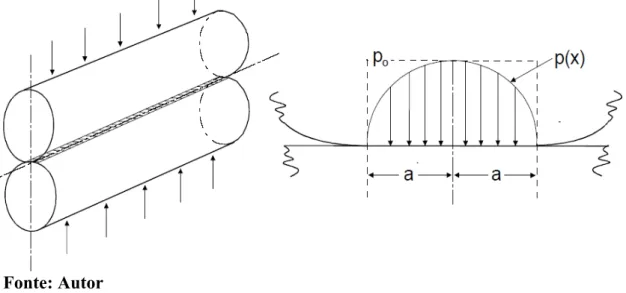
Figura 2-4: Contato entre dois cilindros, e secção do contato de comprimento “2ª” com uma distribuição de pressão p(x).
Fonte: Autor
Com a aplicação da força F entre os corpos as superfícies sofrem deformação e então pode se dizer que a dimensão do contato é “ ”, conforme mostrado na Figura 2-4, que é constante por todo o comprimento do cilindro.
[28]
Portanto, a deformação dentro e fora do contato pode ser representada pelas equações (29) e (30), respectivamente.
[29]
[30]
Considerando como sendo o raio relativo entre as superfícies, a equação (29) pode ser reescrita da seguinte maneira:
[31]
Para o estudo de contato bidimensional, os deslocamentos e só podem ser determinados a partir de um ponto de referência adotado. Dependendo do ponto de referencia, à distância denotada por pode assumir qualquer valor. Em termos físicos, essa aproximação significa que a deformação não pode ser determinada a partir da consideração de uma força local, ou seja, é necessário considerar uma distribuição de pressão. Entretanto para determinar o seguinte proposito, que é analisar as tensões locais do contato é necessário descrever a equação (31) na forma diferencial, e assim, obter o gradiente da deformação na superfície. Desta forma a equação pode ser reescrita da seguinte maneira:
[32]
∫
[33]
Resolvendo equação diferencial acima é possível determinar a distribuição de pressão como sendo:
[34]
A distribuição de pressão depende, ao mesmo tempo, da força de compressão F e do comprimento do contato “a”, em outras palavras, é possível obter mais de uma solução. No entanto a distribuição de pressão deve ser positiva para qualquer valor de x compreendido dentro da região de contato ( Portanto:
( [35]
Uma vez que o objetivo é determinar as tensões e deformações dentro da área de contanto Desta força a desigualdade pode ser simplificada e a força pode ser relacionada com a largura do contato da seguinte maneira:
[36]
[37]
Desta forma a distribuição de pressão de Hertz no contato pode ser definida como:
Da equação (38) a distribuição de pressão cai à zero nas bordas ( ou . Também, comparando a distribuição de pressão de Hertz, com a distribuição de pressão arbitraria apresentada pela equação (35), é possível determinar pressão máxima e a pressão média.
( ) [39]
( ) [40]
2.4.1 Tensão nos corpos
Uma vez definida a distribuição de pressão no item anterior, é possível determinar as tensões geradas pelo o contato entre os corpos. As tensões na região de contato ( no plano são definidas por Hertz da seguinte maneira (POPOV, 2010):
⁄ [41]
⁄ [42]
As tensões principais e a tensão de cisalhamento principal ao longo do eixo z são representadas pelas equações:
[43]
[44]
[46]
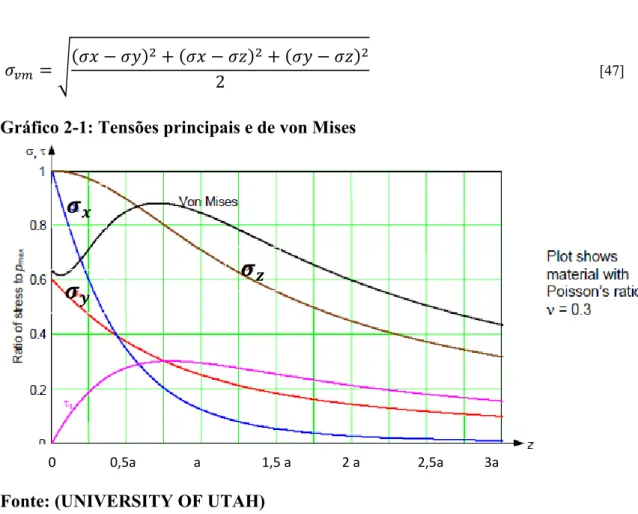
A partir dos resultados obtidos pelas equações apresentadas acima, é possível determinar a tensão equivalente de von Mises (SHIGLEY, MISCHKE e BUDYNAS, 2005).
√ [47]
Gráfico 2-1: Tensões principais e de von Mises
Fonte: (UNIVERSITY OF UTAH)
O Gráfico 2-1 apresenta a variação das tensões principais, de cisalhamento e de von Mises ao longo do eixo Z. As tensões principais na direção de Z e X começam na tensão máxima e diminuem ao longo do eixo Z. A tensão em Z diminui de forma suave, já a tensão principal em X tem uma diminuição acentua, chegando praticamente a zero quando a razão do profundida Z pela metade da largura a ( . A tensão na direção de Y tem uma diminuição lenta, sendo que para uma valores próximos de 0,5a a tensão principal em Y fica maior que a tensão X. A tensão de von Mises tem um valor inicial próximo ao da tensão na direção de Y, menor do que a tensão máxima no contato da superfície. Ao modo que a tensão se distância a 0,75a da superfície de contato a tensão de von Mises apresenta seu ponto máximo e depois apresenta um decaimento lento.
0 0,5a a
3 MÉTODO DE ELEMENTOS FINITOS.
O alto grau de complexidade matemática encontrado nos problemas de engenharia podem ser formulador por equações diferenciais por serem caracterizados pela não proporcionalidade entre a causa e o efeito. A busca por soluções de projetos que apresentem bom desempenho estrutural. Para se atingir este objetivo, é fundamental a utilização de materiais que apresentem melhores desempenhos. Desta forma, para se tornar possível a utilização máxima das características dos materiais, é necessário adotar teorias mais complexas, com formulações não lineares (CORREARD, 2006)
O método de elementos finitos (MEF) fornece soluções para problemas estruturais não lineares, dentro do estudo da mecânica dos sólidos, possui uma serie de problemas caracterizados por comportamento de instabilidade, nos quais não é possível a partir de certa condição.
3.1 NÃO LINEARIDADE
De acordo com o tutorial do programa ANSYS®14.5, a não linearidade está relacionada com as mudanças nas condições iniciais e de contorno da estrutura, chamada de não linearidade de contato. Sendo observado em problemas envolvendo contato e impacto entre corpos.
A não linearidade pode acontecer por vários motivos, e podem ser agrupadas da seguinte maneira:
1. Estado variável (inclusive o contato)
2. Não linearidade da geometria.
3. Não linearidade do material.
considerar as condições de iniciais e de contorno, sem essas considerações a elaboração de um modelo pode ser falha.
Os problemas de contato estão, na sua grande maioria, relacionados com o atrito e o desgaste, estes são problemas não lineares e suas analises são de difícil solução e convergência. Também, geralmente as regiões de contato são desconhecidas até que a solução do problema seja resolvida. Isto se deve ao fato das cargas aplicadas, das características do material, e outros fatores, que podem variar de modo imprevisível dentro e fora do contato. Além disso, fatores como: condução de calor, correntes elétricas, fluxos magnéticos, entre outros, devem ser relacionados nas áreas de contato.
3.2 CLASSIFICAÇÃO DO CONTATO EM GERAL.
A classificação do contato mecânico entre dois corpos por ser feitas de duas maneiras. Quando ocorre o contato entre dois corpos de materiais e geometria diferentes, no qual um deles apresente uma rigidez muito menor que o outro, por exemplo, uma bola de borracha em contato uma placa de aço, pode se dizer que apenas a bola sofrerá deformação, assim este tipo de contato pode ser classificado como rígido-para-flexível.
O segundo modo é quando rigidez entre os corpos são praticamente iguais, por exemplo, duas esferas de aço em contato uma com a outra. Este tipo de contato pode ser classificado com flexível-para-flexível, pois ambos os corpos sofrerão deformações.
3.3 MODELOS DE ANÁLISE.
3.3.1 Contato de elementos nó-para-nó
Os elementos de nó-para-nó também podem ser utilizados na solução de problemas nos quais são utilizados elementos de superfície-para-superfície, em casos que a deformação de deslizamento relativa é desprezível e as rotações (deformação) das duas superfícies permaneçam pequenas, nos nós das duas linhas das superfícies superiores. Um problema com ajuste de interferência (pino/furo) é um típico problema que envolve faceamento e geometria simples entre os corpos, os elementos de nó-para-nó podem substituir os elementos de superfície-para-superfície.
Outra utilização de elementos de nó-para-nó em problemas onde se deseja determinar com precisão as tensões na superfície do corpo, por exemplo, análise das pás e palhetas de uma turbina.
3.3.2 Superfície para superfície
Os elementos de contato superfície-para-superfície podem ser utilizados para problemas de corpos rígido-rígido e rígido-flexível. O programa ANSYS suporta elementos de contato de superfície-para-superfície, rígido-para-flexível e flexível-para-flexível. Estes elementos de contato usam uma “superfície objetivo” e uma “superfície de contato” para formar um par de contatos. A “superfície objetivo” é modelada com elementos TARGE169 ou TARGE170 (para 2-D e 3-D, respectivamente). A “superfície de contato” é modelada com elementos CONTA171, CONTA172, CONTA173, e CONTA174 (para 3-D). Para criar um par de contatos, nomeia-se o mesmo número da constante real para ambos os elementos, o elemento objetivo e o elemento de contato. Estes elementos de superfície-para-superfície são bem apropriados para aplicações como ajuste de interferência no contato quando da montagem ou no contato de entrada, forjamento, e problemas de contato profundo. Os elementos de contato de superfície-para-superfície têm várias vantagens sobre o elemento de nó-para-nó CONTA175. Estes elementos:
• Suportam elementos de alta e baixa ordem, nas superfícies de contato e objetivo (em outras palavra, canto-nó ou elementos de meio-nó).
• Não tem nenhuma restrição na forma da superfície objetiva. Descontinuidades de superfície podem ser físicas ou devido à discretização da malha. Usando estes elementos para uma superfície objetivo rígida, podem-se modelar superfícies planas e curvas em 2-D e 3-D, usando frequentemente formas geométricas simples como círculos, parábolas, esferas, cones, e cilindros. Podem ser modeladas formas rígidas mais complexas ou formas deformadas gerais usando técnicas de pré-processamento especiais. Elementos de contato de superfície-para-superfície não são bem apropriados para ponto-para-ponto, ponto-para-superfície, ou aplicações de contato de extremidade para- superfície, como suporte de tubo ou montagens com ajuste. Devem-se utilizar os elementos nó-para-superfície ou nó-para-nó nestes casos. Podem-se usar elementos de contato de superfície-para-superfície para a maioria das regiões de contato e podem-se usar alguns elementos de contato de nó-para-superfície próximos dos cantos de contato. Os elementos de contato de superfície-para-superfície suportam análise geral estática e transiente, flambagem, análise harmônica, análise modal ou de espectro e análises de subestruturas.
3.3.3 Nó-para-superfície
CONTA175 é um elemento de contato de nó-para-superfície. O mesmo suporta grande deslizamento, grande deformação, e diferentes malhas entre os componentes de contato.
de alta ordem no lado da superfície de contato. O elemento pode falhar se a superfície objetivo contiver descontinuidades.
3.4 DESCRIÇÃO DO CONTATO
3.4.1 Tipo de contato
O programa ANSYS apresenta cinco tipos de contato e eles são classificados de acordo com o grau de não linearidade, onde podem ser classificados como contatos lineares ou não lineares. Os cinco tipos são denominados como: “bonded”, “no separation”, “frictionless”, “rough” e “frictional” (LEE, 2010).
Bonded ou “colado” como seria a tradução, é um tipo de contato que pertence à classe dos contatos lineares. Quando esse tipo de contato é utilizado às faces ou as bordas, 3D e 2D respectivamente, se mantêm em contato como se estivem unidas, tanto na direção tangencial quanto normal.
No separation ou sem separação, assim como “bonded” é um tipo de contato linear, no entanto as superfícies ou bordas permanece unidas apenas na direção normal, o que permite pequenos deslizamentos entre os corpos na direção tangencial.
Frictionless ou “livre de atrito”, diferente dos dois anteriores, ele pertence à classe dos contatos não lineares. Esse tipo de contato permite tanto deslocamento na direção normal e deslizamento na direção tangencial sem qualquer força de atrito no contato entre as superfícies ou bordas dos corpos.
Rough ou “rugoso”, faz parte dos contatos não lineares. Esse tipo de contato assume que a rugosidade é tão grande que nenhum deslizamento tangencial é permitido e a separação das superfícies (bordas) é permitido na direção normal.
cisalhamento excede a força de atrito (um valor múltiplo da tensão normal pelo coeficiente de atrito).
3.4.2 Formulação de contato.
MPC (Multi-point Constraint) é altamente recomendada para analises lineares do tipo “bonded” e “no separation”. Este tipo de formulação adiciona algumas relações de deslocamento entre os pontos das superfícies em contato.
Pure Penalty, é utilizado quando não se deseja penetração entre as superfícies. Sempre que ocorrer uma penetração normal, o sistema reage aplicando uma força normal contraria, a fim de recuar a superfície, eliminando a penetração. Esse tipo de situação pode ser regulada, aumentando ou diminuindo a constante
(dureza normal) que é apenas um parâmetro de penalidade do algoritmo, não apresentando significado físico. Do mesmo modo, se não desejar deslizamento tangencial entre as superfícies é possível adicional uma constante de rigidez tangencial , que funciona do mesmo modo que a penalidade normal, no entanto, na direção tangencial.
Normal Lagrange, assim como a formulação “pure penalty” ela é utilizada em contatos não lineares, no qual é necessário maior grau de liberdade. Esse tipo de formulação adiciona uma pressão de contato para satisfazer a compatibilidade da solução. Sempre que há contato entre as superfícies, o programa calcula a pressão explicitamente e então utilização este valor para não permitir a penetração da superfície objeto. Como o próprio nome diz, esse tipo de formulação calcula somente a pressão do contato normal à superfície. Na direção tangencial é aplicado o sistema “pure penalty” permitindo um pequeno deslizamento. O método normal lagrange não permite penetração alguma, por esse motivo o status do contato pode abrir e fechar, o que aumenta a dificuldade do sistema convergir.
4 METODOLOGIA
A metodologia utilizada para resolução deste trabalho consiste na comparação entre os resultados analíticos e numéricos, utilizando software de elementos finitos. Para isso são elaboradas planilhas e gráficos, o que viabiliza a comparação e compreensão dos resultados.
4.1 ANALÍTICA
A metodologia analítica é dividida em duas partes. Na primeira parte é feita uma análise da variação do raio relativo, apresentando seu comportamento com a variação dos raios principais ( , apresentado o sentido e a direção do raio , assim como também algumas restições matemáticas e físicas estabelecidas quando o valor de
é igual ou menor que . Seguindo o mesmo conceito, foi discutido o comportamento da largura do contato com a variação das forças e do raio relativo.
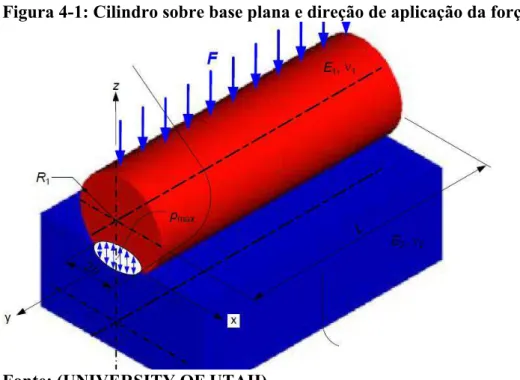
Na segunda parte, foram elaboradas tabelas com os valores dos resultados das equações [43], [44], [45] e [47] para diferentes valores de carga aplicadas (F[N]) utilizando uma geometria constante, ou seja, um cilindro sobre uma base plana, conforme mostrado na Figura 4-1 e comparados com os valores obtidos pelo MEF.
Figura 4-1: Cilindro sobre base plana e direção de aplicação da força.
Para a realização do estudo foram adotados valores: do raio do cilindro
constante e igual a 40[mm], comprimento igual a 4[mm] a material para ambas as partes (cilindro e base) como sendo o aço (modulo de elasticidade ( igual a 210[GPa] e coeficiente de poisson igual a 0,3). A Tabela 4-1 indica a sequencia e o carregamento para cada análise.
Tabela 4-1: Variação das forças em cada análise.
ANÁLISE FORÇA [N] ANÁLISE FORÇA [N]
01 10 10 120
02 20 11 140
03 30 12 160
04 40 13 200
05 50 14 240
06 60 15 280
07 70 16 320
08 80 17 360
09 100 18 400
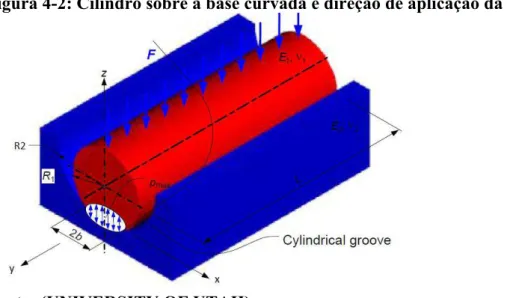
Após a análise das tensões principais para uma geometria constante devido a variação das forças, foi analisada a variação da pressão máxima de contato, devido a variação do raio da base (aproximando-se ao do raio do cilindro) como mostrado na Figura 4-2. Para isso foi adotado a força máxima aplicada (400[N]). A geometria e os materiais (cilindro e base) não se alteraram.
Figura 4-2: Cilindro sobre a base curvada e direção de aplicação da força.
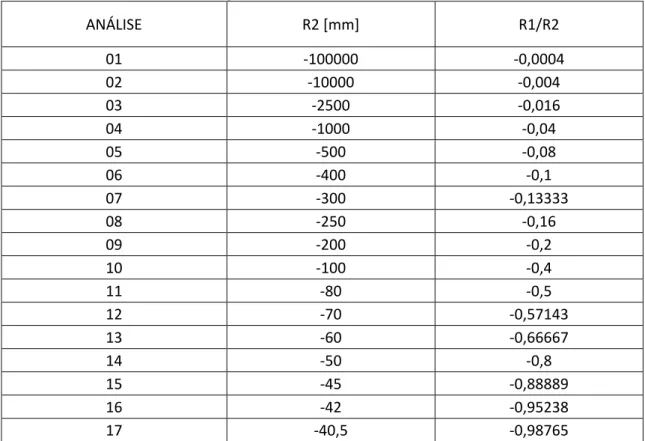
A Tabela 4-2 apresenta a sequencia, os valores do raio da base ( ) e a razão entre o raio do cilindro e o raio da base ( .
Tabela 4-2: Ordem de variação do raio da base R2.
ANÁLISE R2 [mm] R1/R2
01 -100000 -0,0004
02 -10000 -0,004
03 -2500 -0,016
04 -1000 -0,04
05 -500 -0,08
06 -400 -0,1
07 -300 -0,13333
08 -250 -0,16
09 -200 -0,2
10 -100 -0,4
11 -80 -0,5
12 -70 -0,57143
13 -60 -0,66667
14 -50 -0,8
15 -45 -0,88889
16 -42 -0,95238
17 -40,5 -0,98765
4.2 NUMÉRICA
Analogamente à metodologia analítica, o estudo numérico também ocorreu variando-se as forças e a geometria do modelo. No entanto, a análise numérica é mais complexa, pois depende inteiramente da construção do modelo.
Abaixo será descrito, passo-a-passo da elaboração do modelo numérico e apontados às formulações e tipos de contato utilizados nas simulações, que são fundamentais nos resultados apresentados.
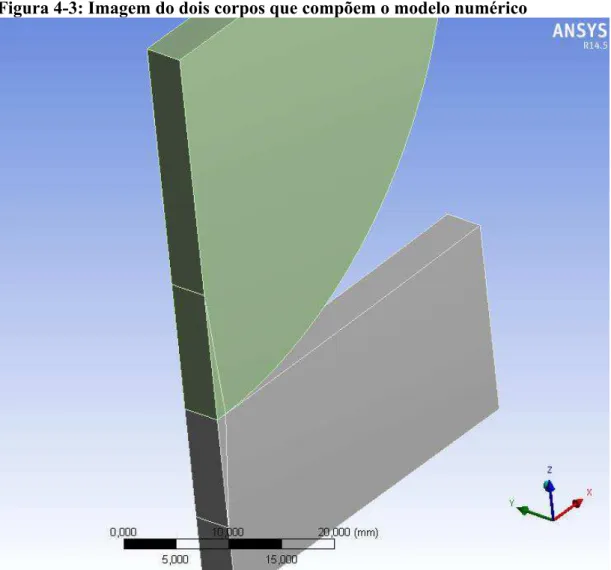
4.2.1 Geometria
são iguais, tendo como variável apenas as forças, conforme a sequencia apresentada pela Tabela 4-1. A Figura 4-3 mostra a posição e a geometria.
Figura 4-3: Imagem do dois corpos que compõem o modelo numérico
4.2.1.1 Base
A base foi determinada por 4 dimensões, como mostra a Figura 4-4:
A, sendo a largura;
H, a altura da base;
R2, o raio de superfície variável.
Profundidade, determinado na extrusão do corpo
Figura 4-4: Imagem do corpo medidas variáveis.
Fonte: Autor.
A base foi elaborada dessa maneira, para tornar possível a alteração da configuração para diferentes valores de raios relativos ( .
forma, o valor do raio da superfície ( foi mantido constante igual a 100000[mm], simulando uma superfície plana.
Para a segunda parte, onde tem como objetivo analisar a variação da pressão máxima de contato com a variação do raio relativo, o valor do raio da superfície da base ( foi variável para cada sequencia, como mostrado na Tabela 4-2. A Figura 4-5 mostra algumas das variações da base, onde ela parte de um máximo (100000[mm]) até uma valor mínimo (40,5[mm]).
Figura 4-5: Variação do raio da base.
4.2.1.2 Cilindro
Para simplificar a elaboração do modelo foi elaborado apenas um quarto do cilindro , conforme mostrado na Figura 4-6. As dimensões do cilindro são definidas, conforme apresentado na metodologia analítica, como sendo o raio da superfície (
igual a 40[mm] e não varia ao decorrer das analises.
Figura 4-6: Imagem do cilindro superior.
Fonte: Autor.
Figura 4-7: Divisão das superfícies para refinamento da malha.
4.2.2 Contato
A definição do tipo de contato e identificação das superfícies “superfície objetivo” e “superfície de contato” são fundamentais para a precisão dos resultados. Dessa forma, foi determinado o tipo de contato e o equacionamento conveniente. A Figura 4-8 apresenta a interface do software , na qual é determinado o tipo de contato, definito os contatos e identificado à formulação a ser utilizada durante a simulação.
Figura 4-8: Contato (frictionless) e formulação (pure penalty).
Fonte: Autor.
A Figura 4-9 mostra as superfícies de contato, indicada na superfície do cilindro, e a objetivo, indicada na superfície da base.
Figura 4-9: Superfície de contato e objetiva.
4.2.3 Malha
A malha dos dois corpos foram executadas com elementos puramente hexagonais a partir do método de Multzone. A escolha da malha é fundamental para o funcionamento do programa. O tempo de simulação é proporcional ao numero de nós e elementos do modelo, de modo que, quanto maior o número de nós e elementos, maior será o tempo de simulação, analogamente, quanto menor o número de elementos e nós, menor será o tempo de simulação.
Figura 4-10: Imagem dos corpos com malha do tipo Multizone.
Fonte: Autor.
diminuição dos elementos (refinamento) nas regiões de maior variação das tensões e deformações permitindo assim melhor resolução dos resultados, e o aumento no tamanho dos elementos nos locais de pouca variação das tensões e deformações. Para esse trabalho, o refinamento ocorreu próximo ao ponto de contato, pois é onde apresenta a maior concentração e variação das tensões e deformações.
Para se determinar um tempo reduzido de simulação com boa precisão de resultado, foi feita uma análise da densidade de malha, o Gráfico 4-1, apresenta a relação entre a tensão máxima no contato e o tamanho do elemento, comparando os resultados entre três simulações, alterando apenas o tamanho do elemento.
Gráfico 4-1: Análise da densidade de malha
Fonte: Autor.
4.2.4 Condições de contorno: carregamento e fixação.
O bom funcionamento do modelo consiste no carregamento e aplicações de condições de contorno que permitam a movimentação e deformação dos corpos. Dessa forma foi analisado e relacionado às superfícies para as devidas condições, que são: “fixed support”, “force” e “frictionless”.
A Figura 4-11 mostra de modo geral as superfícies com as devidas condições aplicadas, entretanto, também apresenta três superfícies sem a restrição, essas superfícies foram indicadas na figura por três setas.
Figura 4-11: superfícies sem condição de contorno.
4.2.4.1 Força
Na superfície superior foi imposta a condição de carregamento na direção apontada para baixo, conforme indica a seta da Figura 4-12. A intensidade da força é variável uma simulação para outra na primeira parte do trabalho, conforme indicado na Tabela 4-1, e será constante e igual a 400[N] na segunda parte, conforme indicado na Tabela 4-2.
Figura 4-12: direção da força aplicada
Fonte: Autor 4.2.4.2 Frictionless
A Figura 4-13 apresenta as superfícies indicadas pelas letras C, D, E, F, G, H, I e J estão definidas com a condição de contorno do tipo “frictionless”. Embora com o mesmo nome do tipo de contato, a condição de contorno não tem a mesma função.
Figura 4-13: superfícies indicadas com condição “frictionless” de contorno.
Fonte: Autor.
4.2.4.3 Fixed support.
Para fixação do modelo foi determinado condição de contorno do tipo “fixed support”. A Figura 4-14 mostra a superfície da base, oposta ao contato com o cilindro, na qual foi aplicada a condição de contorno. Este tipo de condição trava a superfície de modo que não ocorram deslocamento, nem rotação em qualquer direção, ou seja não há deslocamento de nenhum ponto da superfície.
Figura 4-14: base fixa
5 RESULTADOS.
5.1 ANÁLISE ANALÍTICA DA VARIAÇÃO DO RAIO RELATIVO.
A variação do raio relativo “ ” é inversamente proporcional à variação da força “F” aplicada por unidade de comprimento, conforme mostrado pela equação [36], e diretamente proporcional ao quadrado da dimensão significativa do contato “ ”, conforme mostrado pela equação [37]. Deste modo, o entendimento da variação do raio relativo “ ” entre os corpos devido a variação dos raios individuais “ ” e “ ” é de total importância.
Os valores de R1 e R2 podem ser maiores ou menores que zero, dependendo da direção do raio em relação à origem O.
Figura 5-1: Representação de dois tipos de referencias dos centros das superfícies cilíndricas, a imagem a esquerda (a) mostra a direção quando R1 e R2 tem sentido positivo e imagem a direita (b) mostra o valor de R1 positivo e R2 no sentido oposto.
Fonte: Autor
Conforme mostrado na Figura 2-3, Hertz adotou que os valores dos raios de cada corpo, são positivos, quando estão em direções opostas em relação à origem. A Figura 5-1.(a) mostra valores positivos para ambos os raios enquanto que a Figura 5-1(b) representa raios na mesma direção, ou seja, o raio é positivo e o raio do segundo corpo é negativo.
[48]
Figura 5-2: Variação do raio relativo em função de R1 e R2 positivos.
Fonte: Autor.
Considerando que ambos os raios sejam positivos, onde R1 é constante e que R2 varia entre zero (um ponto) até um valor muito grande (um plano) ( , conforme mostra Figura 5-2. A partir da figura, nota-se, que quando
tende a zero ( a razão tende a se tornar muito grande ( ) e consequentemente o raio relativo tende a zero ( ). No entanto se for igual a
, ou seja, tender ao infinito ( ) então a razão tende a um numero muito pequeno ( e assim o raio relativo tende a ser duas vezes o raio R1 ( ).
Gráfico 5-1: Variação o Raio
Fonte: Autor.
Analogamente ao caso anterior, é possível estabelecer os limites e o comportamento dos raios para valores opostos, ou seja, quando R2 é negativo. A Figura 5-3, mostra a variação de R2 onde ( . Se tender a
Figura 5-3: Mudança do sentido do raio R2.
Fonte: Autor.
A partir dessas condições, para o caso de tendendo a ( ) o valor de tende a ser muito grande ( ). Para o caso quando tender a ser muito grande, a razão tende a zero ( e com isso o valor de tende a .
Se então (
Gráfico 5-2: Variação e mudança de direção do raio R2.
Fonte: Autor.
Tabela 5-1: Visão geral da variação do raio relativo “R” em função da variação do raio característico “R2”.
Fonte: Autor.
5.2 LARGURA DO CONTATO
A largura do contato “ ” é uma das variáveis mais importantes da teoria de Hertz, sua validade está condicionada a geometria dos corpos e a dimensão do contato entre eles. Como descrito anteriormente, Hertz assumiu que todas as pressões, tensões e deformações nas superfícies dos corpos devem ocorrer dentro da área de contato, conforme mostrado pelas equações (29), (30), (35) e (38). Lembrando que essas relações foram descritas sob a condição de que a dimensão significativa do contato “ ” seja muito menor do que o raio relativo entre as superfícies ( . Tal condição é vital na precisão dos problemas, entretanto, Hertz não limita a teoria numericamente.
R
R
R1=R2
R1=R2
R
1
>
R
2
R
1
<
R
2
R
1
>
R
2
R1, R2 >0
R1>0 e R2 <0
Desse modo, é possível mostrar o comportamento da variável do contato “ ”, dentro do limite físico e matemático do raio relativo “ ”, conforme apresentado anteriormente. Assumindo que a força aplicada por unidade de comprimento ( ) é constante e que o modulo de elasticidade ( ) dos materiais não varie com a dimensão dos corpos. A equação (37) pode ser reescrita da seguinte maneira:
√ [49]
Onde é constante e igual .
Gráfico 5-3: variação do contato “a” com aumento de R.
Fonte: Autor.
5.3 COMPARAÇÃO DAS TENSÕES PRINCIPAIS SOBRE O EIXO Z
Foram comparadas as tensões máxima principais na superfície ( ) e de von Mises máxima ( ) determinadas analiticamente pela teoria de Hertz, utilizando as equações [43], [44], [45] e [47] com os resultados obtidos a partir de simulações em elementos finitos.
5.3.1 Tensões na direção do eixo Z
As Tabela 5-2, contêm os valores das tensões principais na direção do eixo Z dos resultados analíticos, das simulações e a diferença entre eles. Esses valores foram obtidos variando a força de carregamento para uma dada geometria, conforme mostrado na Figura 4-3.
Tabela 5-2: Comparação da tensão principal no eixo Z.
FORÇA
[N]
σz
[MPa]HERTZσz
[MPa]MEF Diferença [%]10 47,91 36,10 24,65
20 67,76 53,54 20,98
30 82,99 67,35 18,84
40 95,82 79,18 17,37
50 107,13 89,58 16,38
60 117,36 99,00 15,65
70 126,76 107,83 14,94
80 135,51 116,04 14,37
100 151,51 131,17 13,42
120 165,97 144,76 12,78
140 179,27 157,27 12,27
160 191,65 169,06 11,79
200 214,27 190,52 11,08
240 234,72 210,30 10,40
280 253,52 227,99 10,07
320 271,03 244,82 9,67
360 287,47 260,46 9,39
400 303,02 275,68 9,02
gráfico 5-4: Comparação entre os valores de tensão na direção de Z.
Fonte: Autor
5.3.2 Tensões na direção do eixo x
Analogamente, aos resultados das tensões da superfície na direção do eixo Z, o comportamento das tensões na direção do eixo X com a variação das forças de aplicação, mostraram um aumento da tensão na direção de X com o aumento da força de aplicação. Apresentando uma diferença entre os valores encontrado pelo MEF e analíticos, conforme mostrado na Tabela 5-3: Comparação da tensão principal no eixo X, variando de 37,22% para a carga mais baixa de 10[N] até 10,62% para a carga de 400[N].
De acordo com a Tabela 5-2 e Tabela 5-3 as tensões analíticas de Hertz apresentaram os mesmos valores, o que é demostrado pelas equações [43] e [44].
Tabela 5-3: Comparação da tensão principal no eixo X
FORÇA
[N] [MPa] [MPa]
DIFERENÇA [%]
10 47,91 32,72 31,70
20 67,76 50,41 25,60
40 95,82 76,50 20,16
50 107,13 87,07 18,73
60 117,36 96,61 17,68
70 126,76 105,56 16,73
80 135,51 113,88 15,96
100 151,51 129,19 14,73
120 165,97 142,95 13,87
140 179,27 155,57 13,22
160 191,65 167,48 12,61
200 214,27 189,14 11,73
240 234,72 209,14 10,90
280 253,52 226,95 10,48
320 271,03 243,92 10,00
360 287,47 259,69 9,66
400 303,02 275,09 9,22
Entretanto, os valores obtidos pela análise de elementos finitos não apresentaram o mesmo comportamento. A diferença entre as tensões na direção de Z e X foi maior (9,36%) para a força aplicada de 10[N] e menor (0,21%) para força aplicada de 400[N], conforme mostra o Gráfico 5-5:.
Gráfico 5-5: Comparação entre as tensões em Z e X.
5.3.3 Tensões na direção do eixo Y
A Tabela 5-4 mostra a comparação da tensão principal na superfície de contato na direção Y. Analogamente ao comportamento mostrado para as tensões na direção de Z e X, as tensões aumentaram com o aumento da força de aplicação e diferença entre os resultados do método analítico e MEF foram de 28,17% para força de 10[N] e 9,12% para aplicação da força de 400[N].
Tabela 5-4: Comparação da tensão principal no eixo Y
FORÇA
[N] [MPa] [MPa]
DIFERENÇA [%]
10 28,75 20,65 28,17
20 40,65 31,19 23,29
30 49,79 39,54 20,58
40 57,49 46,71 18,76
50 64,28 52,99 17,56
60 70,42 58,68 16,66
70 76,06 64,02 15,83
80 81,31 68,98 15,17
100 90,91 78,11 14,08
120 99,58 86,31 13,33
140 107,56 93,85 12,75
160 114,99 100,96 12,20
200 128,56 113,90 11,41
240 140,83 125,83 10,65
280 152,11 136,48 10,28
320 162,62 146,62 9,83
360 172,48 156,04 9,53
400 181,81 165,23 9,12
As tensões analíticas na superfície de contato na direção do eixo Y podem ser calculadas utilizando a equação [7], a partir dos resultados apresentados nas Tabela 5-2 e Tabela 5-3.
a equação [7] apresenta o mesmo resultado calculado pelo MEF, como pode ser visto pela Tabela 5-5.
Tabela 5-5: Comparação entre os resultados das tensões na direção de Y, calculadas pelo método de elementos finitos com as tensões na direção de Y calculados pela equação [7] a partir das tensões na direção de Z e X de elementos finitos.
FORÇA
[N] [MPa] [MPa] [MPa] [MPa] equação [7]
10 36,10 32,72 20,65 20,65
20 53,54 50,41 31,19 31,19
30 67,35 64,46 39,54 39,54
40 79,18 76,50 46,71 46,71
50 89,58 87,07 52,99 52,99
60 99,00 96,61 58,68 58,68
70 107,83 105,56 64,02 64,02
80 116,04 113,88 68,98 68,98
100 131,17 129,19 78,11 78,11
120 144,76 142,95 86,31 86,31
140 157,27 155,57 93,85 93,85
160 169,06 167,48 100,96 100,96
200 190,52 189,14 113,90 113,90
240 210,30 209,14 125,83 125,83
280 227,99 226,95 136,48 136,48
320 244,82 243,92 146,62 146,62
360 260,46 259,69 156,04 156,04
5.3.4 Tensões de von Mises
A tensão de von Mises foi estudada a partir de seus valores máximos. Conforme mostrado no Gráfico 2-1, a tensão de von Mises tem seu valor máximo fora da superfície. Assim, foram determinados os valores máximo teóricos a partir da equação [47] utilizando os valores das tensões principais sobre o eixo Z e comparado com os valores obtidos nas simulações utilizando o software de elementos finitos.
Assim como as tensões principais, a tensão de von Mises apresentou aumento com crescimento da força de aplicação, como pode ser verificado os valores na Tabela 5-6, e também é possível perceber que a tensão apresentou uma diferença de 27,12% para a força mais baixa de 10 [N] e 9,6% para a maior carga aplicada nesse trabalho de 400[N].
Tabela 5-6: Comparação entre os resultados das tensões de von Mises calculadas analiticamente e pelo método de elementos finitos.
FORÇA
[N]
[MPa]
[MPa]
DIFERENÇA [%]
10 26,71 19,47 27,12
20 37,78 29,32 22,40
30 46,26 36,44 21,24
40 53,42 42,13 21,14
50 59,73 48,45 18,89
60 65,43 54,20 17,17
70 70,67 59,47 15,84
80 75,55 64,25 14,96
100 84,47 72,71 13,92
120 92,53 79,92 13,63
140 99,94 86,25 13,70
160 106,84 92,84 13,10
200 119,46 105,39 11,78
240 130,86 116,53 10,95
280 141,34 125,88 10,94
320 151,1 134,83 10,77
360 160,27 143,95 10,19
5.4 COMPARAÇÃO DA PRESSÃO MÁXIMA NA SUPERFICIE.
Anteriormente foram analisadas as comparações (analítica e MEF) entre as tensões principais e de von Mises devido a variação da carga aplicada (entre 10[N] e 400[N]) para uma dada geometria fixa (cilindro com raio igual a 40[mm] e base com superfície plana), mostrada na Figura 4-3.
As equações [43], [44], [45] e [47] apresentam uma variável em comum, que é a pressão máxima de contato, determinada pela equação [39]. Deste modo, foram comparadas as pressões máxima na superfície devido a variação do raio da base, partindo da superfície plana ( ) até um raio próximo de ( ) para uma carga apllicada de 400[N]. Com base comparação feita anteriormente, a diferença entre a tensão analítica e a calculada pelo MEF foi de 9,6%. A partir desse dado foram corrigidos os dados obtidos pelo software e comparados com o analítico.
A Tabela 5-7 apresenta os valores obtidos a partir dos cálculos analíticos utilizando a equação [39], os valores das simulações utilizando o software de elementos finitos, e a comparação entre esses valores.
Tabela 5-7: Comparação entre os valores corrigidos obtidos pelo MEF e as pressões máximas análiticas
R2 R1/R2
[MPa] [MPa] [MPa]
erro [%] 100000 -0,0004 302,96 275,68 302,96 0,00
10000 -0,004 302,41 266,78 293,18 3,05
2500 -0,016 300,58 263,89 290,00 3,52
1000 -0,04 296,90 260,87 286,68 3,44
500 -0,08 290,65 257,41 282,88 2,67
400 -0,1 287,47 253,41 278,48 3,13
300 -0,13333 282,09 248,99 273,63 3,00
250 -0,16 277,72 245,44 269,73 2,88
200 -0,2 271,03 241,43 265,32 2,11
100 -0,4 234,72 211,25 232,15 1,09
80 -0,5 214,27 195,06 214,36 -0,04
70 -0,57143 198,37 181,37 199,32 -0,48
60 -0,66667 174,95 161,16 177,11 -1,23
50 -0,8 135,51 125,75 138,19 -1,98
45 -0,88889 101,01 94,97 104,37 -3,33
40,5 -0,98765 33,67 32,40 35,61 -5,75
Analisando o comportamento do raio relativo , apresentado no Gráfico 5-2, com a variação do raio da base ( é possivel identifica que o raio relativo apresenta uma diminuição acentuada na primeira parte da variação ( ) e depois tem uma diminuição lenta até se aproximar do valor de seja igual ao valor do
. A equação [39] mostra que a pressão máxima de Hertz na supertfície é inversamente proporcional a raiz quadrada da variação do raio relativo . A linha tracejada do gráfico 5-6 mostra a variação da pressão máxima de Hertz, com a variação da razão entre o raio do cilindro e o raio da base ( ) no qual parte do valor onde
é igual a , até tendo a uma superfície plana ( ). A variação da pressão máxima da superfície apresenta um crescimento acentuado na quando a razão é máxima ( ), de modo que a diminuição a razão entre
resultará num crescimento aumento acentuado da pressão máxima no contato. Já a variação da pressão para valores de menores que -0,9 até 0 apresentam um aumento lento, assim, uma variação pequena variação da razão não apresentará grande variação na pressão.
gráfico 5-6: Variáção entre as pressões máxima analítica e MEF.
A variação da pressão máxima no contato determinada pela método de elementos finitos através do software (linha cheia) apresentada no gráfico 5-6, mostra um comportamento semelhante ao calculado analiticamente. Entretanto, a diferença entre os valores das tensões (Tabela 5-7) mostra uma variação descontrolada, onde, para valores onde de muito grandes (superficies planas) a diferença é bastante instavel com diminuição do raio relativo apresentando uma diferença máxima de 3,52[%], e com a diminuição do raio relativo, a diferença foi diminuindo, assim como a instabilidade. Para valores.onde era aproximadamente metade de ( a diferença entre foi invertido, neste ponto as tensões do MEF corrigida apresentaram valores maiores que o calculado analiticamente, e a diferença começou a aumentar. Pelo comportamento do gráfico 5-7 pode se afirmar que quando menor o raio relativo maior será a diferença entre os resultados.
gráfico 5-7: Variação da diferença entre as pressões máximas analíticas e MEF corrigida.