Paulo Vitor Silva
Orientador: Prof. Dr. Ricardo Ferreira Pinheiro Coorientador: Prof. Dr. Andrés Ortiz Salazar
Tese de Doutorado apresentada ao
Pro-grama de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Doutor em Ciências em Engenharia Elétrica e Engenharia de Computação.
Silva, Paulo Vitor.
Regulador Eletromagnético de Frequência aplicado no controle de velocidade de geradores eólicos / Paulo Vitor Silva. - Natal, RN, 2015.
83 f.
Orientador: Prof. Dr. Ricardo Ferreira Pinheiro. Coorientador: Prof. Dr. Andrés Ortiz Salazar.
Tese (doutorado) - Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e de Com-putação. 2015
1. Aerogeradores - Tese. 2. Controle de Velocidade - Tese. 3. Inovação Tecnológica - Tese. 4. Regulador Eletromagnético de Frequência - Tese. 5. Eletromagnético de Velocidade - Tese. I. Pinheiro, Ricardo Ferreira. II. Salazar, Andrés Ortiz. III. Universidade Federal do Rio Grande do Norte. IV. Título.
Prof. Dr. Andrés Ortiz Salazar (coorientador) . . . DCA/UFRN
Prof. Dr. Vladimiro Henrique Barrosa Pinto de Miranda . . . UNIPORTO
Prof. Dr. Fabiano Salvadori . . . UFPB
Prof. Dr. Aldayr Dantas de Araújo . . . UFRN
Prof. Dr. José Tavares de Oliveira . . . UFRN
orientações acadêmicas.
A todos os meus familiares e amigos, que me incetivaram e me apoiaram nessa etapa de minha vida.
que, além de uma vida útil curta, representam frequentemente, fontes de ruído e defeitos. O REF dispensa essas caixas de transmissão, representando um avanço tecnológico, uti-lizando para isso uma máquina de indução adaptada, na qual o estator passa a ser móvel, solidário ao eixo da turbina.
Na topologia utilizada neste trabalho, o REF também permite dispensar o uso de con-versores eletrônicos para estabelecer o acoplamento entre o gerador e a rede elétrica, razão pela qual também proporciona a possibilidade de obtenção de geração em corrente alternada, com tensão e frequência constantes, onde não exista a rede elétrica.
Responsável pelo controle da velocidade mecânica do gerador, o REF pode ser útil em outros sistemas de transmissão onde o controle de velocidade mecânica de saída seja o objetivo.
Além disso, por operar através da combinação de duas entradas, uma mecânica e outra elétrica, o REF multiplica as possibilidades de aplicações por ser apto ao acoplamento sinérgico entre energias de matrizes diferentes, e, por tais motivos, possibilita que as di-versas fontes de energia envolvidas sejam desacopladas da rede, sendo o gerador síncrono o responsável pela conexão do sistema com a rede elétrica, simplificando as estratégias de controle quanto à potência injetada na mesma.
Resultados de simulação e experimentais são apresentados no decorrer do trabalho, voltados a um aerogerador, validando a proposta em relação a eficiência no controle de velocidade do sistema para diferentes condições de vento.
Palavras-chave: Aerogeradores, Controle de Velocidade, DSP TMS320F2812,
boxes, representing a technological advancement, using for that an adapted induction machine, in which the stator becomes mobile, supportive to the axis of the turbine.
In the topology used in this study, the EFR also allows us to leave out the usage of the eletronic converters to establish the coupling between the generator and the electrical grid. It also the reason why it provides the possibility of obtaining the generation in alternating current, with constant voltage and frequency, where there is no electrical grid.
Responsable for the mechanical speed control of the generator, the EFR can be use-ful in other transmission systems in which the mechanical speed control output is the objective.
In addition, the EFR operates through the combination of two inputs, a mechani-cal and other electrimechani-cal. It multiplies the possibilities of application because it is able to synergistic coupling between different arrays of energy, and, for such reasons, it en-ables the various sources of energy involved to be uncoupled from the network, being the synchronous generator responsible for the system connection with the electrical grid, simplifying the control strategies on the power injected in it.
Experimental and simulation results are presented through this study, about a wind turbine, validating the proposal related to the efficience in the speed control of the system for different wind conditions.
Keywords: Wind Turbine, Speed Control, DSP TMS320F2812, Technological
1.1.1 Topologias de Aerogeradores . . . 4
1.2 Estado da Arte . . . 8
1.2.1 O Problema . . . 8
1.2.2 Contribuição deste Trabalho . . . 9
1.2.3 Potencialidades do REF . . . 10
2 Descrição do Sistema e Modelagem 15 2.1 Descrição do Sistema . . . 15
2.1.1 Estratégia de Controle . . . 19
2.2 Modelagem Matemática . . . 20
2.2.1 Turbina . . . 20
2.2.2 REF . . . 22
2.2.3 Gerador Síncrono . . . 25
2.2.4 Adequação da Estratégia de Controle do REF . . . 26
2.2.5 Rotinas da Lógica de Programação . . . 27
2.3 Conclusão . . . 29
3 Montagem Experimental 31 3.1 Esquema Geral da Montagem . . . 31
3.2 Estrutura Laboratorial . . . 32
3.2.1 Protótipo . . . 32
3.2.2 Bloco dos Sensores . . . 35
3.2.3 Interface de Comando dos Pulsos . . . 37
3.2.4 Inversor . . . 38
3.2.5 Carga Resistiva . . . 39
3.2.6 Aquisição de Dados . . . 39
3.3 Recursos Computacionais . . . 39
4.1 Resultados de Simulação . . . 47
4.1.1 Sistema Completo - Análise de Fluxo de Potência e Controle de Velocidade . . . 47
4.1.2 Controle de Velocidade do REF . . . 57
4.2 Resultados Experimentais . . . 62
4.2.1 Controle de Velocidade do REF . . . 62
4.2.2 Sistema Completo - Gerador Síncrono Acoplado . . . 65
4.2.3 Sistema Completo - Carga Aclopada ao Gerador Síncrono . . . . 67
4.3 Conclusão . . . 68
5 Conclusões Gerais e Propostas para Trabalhos Futuros 69 5.1 Conclusão . . . 69
5.2 Propostas para Trabalhos Futuros . . . 71
5.2.1 Evolução dos Testes Iniciais . . . 71
5.2.2 Integração do Sistema com a Energia Solar . . . 71
5.2.3 Estudo e Implementação do Vento . . . 72
5.2.4 Estimador de Velocidade . . . 72
5.2.5 Interligação do Sistema com a Rede e/ou Acoplamento do Dipos-itivo Simulador de Rede . . . 72
5.2.6 Avaliação de outras Estratégias de Controle e Tipo de Controlador 72 5.2.7 Utilizar Gerador de Indução . . . 73
5.2.8 Uso de Mancais Magnéticos . . . 73
5.2.9 Análise dos Campos Magnéticos Envolvidos . . . 73
5.2.10 Desenvolvimento de Software para Otimização em Sistema Híbrido 74 Referências Bibliográficas 75 A Diagramas Esquemáticos 79 A.1 Diagrama Esquemático - Sensor de Tensão ca . . . 79
A.2 Diagrama Esquemático - Sensor de Corrente ac e Tensão cc . . . 79
A.3 Diagrama Esquemático - Sensor de Velocidade - 1 . . . 80
A.4 Diagrama Esquemático - Sensor de Velocidade - 2 . . . 80
A.5 Diagrama Esquemático - Condicionamento dos Pulsos PWM . . . 81
A.6 Diagrama Esquemático - Driver . . . 82
fonte eólica no Brasil, numa previsão até o ano 2020. Fonte: http://
brazilenergy.com.br/portfolio/brazil-wind/perfil-do-setor/. . . 5
1.5 Diagrama esquemático ilustrando os principais componentes de um aeroger-ador utilizando um Geraeroger-ador de Indução com rotor em Gaiola de Esquilo. . 6
1.6 Diagrama esquemático ilustrando os principais componentes de um aeroger-ador utilizando um Geraeroger-ador Síncrono Multipolar. . . 7
1.7 Diagrama esquemático ilustrando os principais componentes de um aeroger-ador utilizando um Geraeroger-ador de Indução Duplamente Excitado . . . 8
1.8 Diagrama esquemático ilustrando os principais componentes da tecnolo-gia proposta. . . 11
1.9 Diagrama esquemático ilustrando as principais fontes para alimentação da bateria que alimenta o Inversor. . . 12
1.10 Diagrama esquemático ilustrando a topologia com o Gerador de Indução e o filtro ativo. . . 13
2.1 Diagrama esquemático ilustrando a topologia proposta. . . 16
2.2 Diagrama com a ilustração do sistema de referência - máquina convencional. 17 2.3 Diagrama com a ilustração do sistema de referência - REF. . . 17
2.4 Diagrama esquemático do protótipo do REF - detalhamento físico. . . 17
2.5 Diagrama esquemático ilustrando a estrutura mecânica completa. . . 18
2.6 Foto ilustrativa do protótipo - detalhamento físico. . . 18
2.7 Gráfico da velocidade de referência - controle escalar. . . 19
2.8 Gráfico da velocidade Wrm - controle escalar. . . 20
2.9 Gráfico do comportamento do sinal de erro de Wrm - controle escalar. . . 20
2.10 Coeficiente de potência em funçãoλ. . . 21
2.11 Ilustração demonstrando a Transformação 123 para dq, passando pela Transformaçãoαβ. . . 22
3.1 Visão panorâmica do sistema. . . 31
3.2 Foto ilustrativa do protótipo - detalhamento físico. . . 32
3.3 Diagrama esquemático ilustrando a estrutura de conversão de energia com-pleta. . . 32
3.4 Fotografia do Motor de Corrente Contínua utilizado para emular a fonte primária de energia. . . 33
3.5 Fotografia do variac utilizado como fonte cc variável. . . 33
3.6 Fotografia do REF. . . 35
3.7 Fotografia dos anéis coletores do REF. . . 35
3.8 Fotografia de uma das três escovas utilizada para o acesso elétrico do REF. 36 3.9 Fotografia do Gerador Síncrono utilizado no protótipo. . . 36
3.10 Fotografia da fonte cc utilizada para alimentação do enrolamento de campo do gerador síncrono. . . 37
3.11 Fotografia do quadro de acionamentos para os chaveamentos necessários ao funcionamento do sistema. . . 38
3.12 Bloco de sensores. . . 39
3.13 Desenho do disco do encoder utilizado no sensor de velocidade - vista superior. . . 40
3.14 Desenho do disco do encoder utilizado no sensor de velocidade - vista isométrica. . . 40
3.15 Gráfico de calibração da velocidade do rotor síncrono com a saída do sinal do sensor de velocidade. . . 41
3.16 Gráfico de calibração da velocidade do rotor síncrono com o sinal do canal de leitura do DSP. . . 41
3.17 Fotografia da placa de condicionamento dos pulsos PWM. . . 42
3.18 Fotografia da placa de condicionamento conectada aos Drivers. . . 43
3.19 Fotografia do Inversor. À esquerda os capacitores, ao centro o inversor, à direita a placa de condicionamentos e, acima, um ventilador para o sis-tema de refrigeração dos IGBT’s. . . 43
3.20 Resistor de potência utilizado no banco de carga resistiva. . . 44
3.21 Fotografia da placa de aquisição de dados da National Instruments. . . 44
3.22 Fotografia da placa controladora DSP TMS320F2812 . . . 44
3.23 Desenho proporcionando uma visão geral do módulo DSP . . . 45
3.24 Demonstração da apresentação de um sinal lido através do DSP, em tela de computador. . . 45
4.1 Diagrama esquemático ilustrando a topologia adotada nas simulações. . . 48
4.2 Gráfico do comportamento da potência de saída da turbina eólica. . . 48
4.3 Gráfico do comportamento da potência de saída da turbina eólica. . . 49
4.4 Gráfico da velocidade Wrm e velocidade de referência. . . 49
4.5 Gráfico do comportamento do sinal de erro de Wrm. . . 50
4.20 Gráficos dos comportamentos da tensão eficaz e frequência de saída do Gerador Síncrono. . . 56 4.21 Gráfico do comportamento da tensão de pico de saída do Gerador Síncrono. 56 4.22 Gráfico do comportamento da potência de saída do Inversor. . . 57 4.23 Gráfico do comportamento da potência de saída do REF. . . 57 4.24 Gráfico do comportamento da potência de saída do REF diante da
vari-ação da potência turbinada. . . 58 4.25 Gráfico do comportamento da potência de saída do Gerador Síncrono
di-ante da variação da potência turbinada. . . 58 4.26 Diagrama esquemático ilustrando os principais componentes da
tecnolo-gia proposta. . . 59 4.27 Gráfico da velocidade Wv da Turbina. . . 60 4.28 Gráfico do comportamento da velocidade Wrm e velocidade de referência. 60 4.29 Gráfico do comportamento do sinal de erro de Wrm. . . 60 4.30 Gráfico mostrando as variações de velocidade Wv da Turbina adotadas na
simulação. . . 61 4.31 Gráfico do comportamento da velocidade Wrm e velocidade de
referên-cia, durante as variações de velocidade do vento. . . 61 4.32 Gráfico do comportamento do sinal de erro de Wrm, durante as variações
de velocidade do vento. . . 62 4.33 Gráfico do comportamento da velocidade Wv da Turbina (rotor
assín-crono), em teste experimental. . . 62 4.34 Gráfico do comportamento da velocidade Wrm, em teste experimental. . . 63 4.35 Gráfico do comportamento do sinal de erro de Wrm, em teste experimental. 63 4.36 Gráfico apresentando as variações de Velocidade Wv impostas à Turbina. 64 4.37 Gráfico do comportameto da velocidade Wrm, quando a turbina varia
conforme o gráfico da Figura 4.36. . . 64 4.38 Gráfico do comportamento do sinal de erro de Wrm, quando a Turbina
4.40 Comportamento da corrente da fase A do rotor assíncrono para velocidade
da Turbina em 300 rpm. . . 66
4.41 Comportamento da corrente da fase A do rotor assíncrono para velocidade da Turbina em 400 rpm. . . 66
4.42 Oscilograma das tensões de saída do gerador síncrono via sensor de ten-são para velocidadeWvde 200 rpm. . . 67
4.43 Oscilograma da corrente de saída do gerador síncrono via sensor de cor-rente para velocidadeWvde 200 rpm. . . 67
5.1 Diagrama esquemático ilustrando a topologia com integração do painel solar. . . 71
5.2 Diagrama esquemático ilustrando a topologia com o gerador de indução e o filtro ativo. . . 73
5.3 Gráfico ilustrando as linhas de campo de uma máquina de indução com rotor em gaiola. . . 74
A.1 Sensor de Tensão ca. . . 79
A.2 Sensor de Tensão cc. . . 80
A.3 Sensor de Velocidade - 1. . . 80
A.4 Sensor de Velocidade - 2. . . 81
A.5 Diagrama Esquemático - Sensor de condicionamento dos pulsos PWM. . 81
4.1 Fluxo de potência. . . 51
vW Velocidade do vento;
Wv Velocidade de saída da turbina;
β Ângulo de passo das pás;
Ct Coeficiente de torque da turbina;
D Diâmetro externo da turbina;
Tv Torque mecânico de saída da turbina;
ωr Velocidade angular do rotor da máquina convencional;
ωs Velocidade angular do campo girante da máquina convencional;
S Escorregamento;
ωrm Velocidade angular do rotor síncrono;
ω∗
rm Velocidade angular de referência do rotor síncrono;
vs Tensão nos terminais do estator;
vr Tensão nos terminais do rotor;
Rs Resistência do estator da máquina de indução;
Rr Resistência do rotor da máquina de indução;
Ls Indutância do estator da máquina de indução;
Lrr Forma matricial das indutâncias próprias do rotor da máquina de indução;
Lm Indutância mútua da máquina de indução;
p Número de pares de pólos;
vsα Tensão na componenteαdo estator; vrα Tensão na componenteαdo rotor; vsβ Tensão na componenteβdo estator;
vrβ Tensão na componenteβdo rotor; isα Corrente na componenteαdo estator; irα Corrente na componenteαdo rotor; isβ Corrente na componenteβdo estator; irβ Corrente na componenteβdo rotor;
λsα Fluxo na componenteαdo estator;
λrα Fluxo na componenteαdo rotor;
λsβ Fluxo na componenteβdo estator;
λrβ Fluxo na componenteβdo rotor;
vsd Tensão na componented do estator;
vrd Tensão na componented do rotor;
vsq Tensão na componenteqdo estator;
vrq Tensão na componenteqdo rotor;
isd Corrente na componenteddo estator;
ird Corrente na componenteddo rotor;
isq Corrente na componenteqdo estator;
irq Corrente na componenteqdo rotor;
λsd Fluxo na componenteddo estator;
id Corrente na componented do enrolamento de campo do gerador síncrono;
iq Corrente na componenteqdo enrolamento de campo do gerador síncrono;
if d Corrente na componenteqdo enrolamento de campo do gerador síncrono;
λd Fluxo na componented do enrolamento do estator do gerador síncrono;
λq Fluxo na componenteqdo enrolamento do estator do gerador síncrono;
vf d Tensão na componenteqdo enrolamento de campo do gerador síncrono;
λf d Fluxo na componented do enrolamento de campo do gerador síncrono;
Tmi Torque eletromagnético de saída da máquina de indução;
Te Torque eletromagnético interno do gerador síncrono;
TREF Torque eletromagnético de saída do REF;
T∗
e Torque eletromagnético de referência;
H Momento de inércia do conjunto;
P Número de polos;
J Componente de atrito geral do conjunto;
irsd Corrente de referência do rotor assíncrono na componente d no referencial do fluxo rotórico;
irsq Corrente de referência do rotor assíncrono na componente d no referencial do fluxo rotórico;
ˆ
V∗
sb Tensão de referência da fase b para rotina de modulação vetorial;
V∗
sc Tensão de referência da fase c para rotina de modulação vetorial;
SA Sinal PWM de referência da fase a;
SB Sinal PWM de referência da fase b;
SC Sinal PWM de referência da fase c;
−→ WF
V Vetor da velocidade de saída da turbina no referencial fixo;
−−−−→
WCF_RAS Vetor da velocidade do campo do rotor assíncrono no referencial fixo;
−−−→
WCF_RS Vetor da velocidade final do rotor síncrono no referencial fixo;
−−−−−→
de combustíveis fósseis, a emissão de gases causadores do "efeito estufa"e a polêmica preocupação com o aquecimento global são alguns dos fatores que vêm desencadeando a procura cada vez maior por fontes alternativas de energia [WWEA 2014].
Paralelamente, o desenvolvimento tecnológico caminha numa tendência em que cada vez mais cresce a dependência energética, sendo que a energia elétrica cada vez mais se torna importante nas matrizes de todos os países que, historicamente, a obtiveram a partir de várias fontes primárias.
Nas últimas décadas, fatores como a elevação dos custos das fontes primárias, cujos mananciais vêm se esgotando e exigindo a captação em locais cada vez mais distantes e de elevado risco para o trabalho humano, assim como problemas causados pelos impactos ambientais envolvidos na captação, transporte e transformação das energias primárias, têm conscientizado a população e forçado dirigentes dos mais diversos países a investir cada vez mais na busca da substituição das fontes primárias por fontes renováveis [Onat & Bayar 2010].
Não apenas pela redução das reservas das fontes tradicionais tornou-se necessário caminhar em busca das fontes renováveis, mas também a necessidade de redução dos im-pactos ambientais em todo o ciclo de processamento dos recursos energéticos têm obri-gado a migração para fontes que, além de renováveis, apresentem um balanço de impacto ambiental nulo, ou se possível, negativo, de modo a contribuir para preservar ou melhorar as condições de vida no planeta [Fadigas 2011].
Como exemplo, observe-se a Tabela 1.1 em que o balanço total do ciclo da produção energética quanto à produção deCO2 é apresentado comparativamente para várias
tec-nologias. O quadro demonstra que as fontes renováveis causam uma emissão muito mais baixa de CO2, razão pela qual a produção de energia a partir delas tem sido alvo de
grandes investimentos em pesquisa e desenvolvimento tecnológico em vários países do mundo, especialmente visando à produção de energia elétrica.
Tabela 1.1: Emissão de CO2 para diversas tecnologias. Fonte: Renewable Energy
Re-sources
do REF nesta tese. Observa-se que em estudos comparativos, a energia eólica foi con-siderada a fonte de maior sustentabilidade, como é apresentada na Tabela 1.2, no qual foram analisados quesitos como: custo de produção da energia, emissão de gás carbônico, disponibilidade da fonte, eficiência, consumo de água potável, uso da terra, custos exter-nos e benefícios comunitários. Nesta tabela, o número 1 representa o melhor caso e 8 o pior caso [Onat & Bayar 2010].
Tabela 1.2: Análise de sustentabilidade das fontes alternativas de energia. Fonte: [Onat Bayar 2010]
Nesse contexto, a produção de eletricidade a partir da energia eólica, desde a primeira crise do petróleo da década de 1970, passou a ser muito pesquisada em diversos países e vem sendo crescentemente explorada em todo o mundo, sendo hoje uma das que tem maior taxa de crescimento anual em termos de potência instalada, conforme demonstram os gráficos das Figuras 1.1 e 1.2.
Figura 1.1: Evolução da potência mundial instalada anualmente de 1996 a 2013 no mundo. Fonte GWEC: Global Wind Energy Council http: //www.gwec. net/global-figures/graphs/
representam 5% da capacidade total instalada no mundo [WWEA 2014].
Figura 1.3: Capacidade acumulada de Energia Eólica instalada. Fonte: [WWEA 2014] No Brasil, algumas políticas já estão sendo implantadas com o objetivo de incenti-var a exploração de novas fontes de energia, buscando melhorar a sustentabilidade no abastecimento através de fontes renováveis. Dentre elas, pode-se destacar o Programa Emergencial de Energia Eólica - PROEÓLICA, criado em julho de 2001, com o objetivo de incentivar investimentos na área de geração eólica por meio de benefícios, tais como, garantir a compra de energia gerada por um prazo mínimo de 15 anos e garantir preços determinados pela Agência Nacional de Energia Elétrica - ANEEL e o Programa de In-centivo às Fontes Alternativas de Energia Elétrica - PROINFA, regulamentado através da Lei no10.438 de 15 de abril de 2002, que estabeleceu a contratação de 3.300MW de ener-gia no Sistema Interligado Nacional em esquema de geração distribuída produzidos por biomassa, pequenas centrais hidrelétricas e fontes de energia eólica.
Conforme ilustra o gráfico da Figura 1.4, com as contratações dos leilões A-3 e de Reserva de 2011, a capacidade instalada de energia eólica passará de 1 GW para aproxi-madamente 7 GW em 2015. Até 2020, essa fonte de energia alcançará mais de 11 GW, respondendo por cerca de 7% da matriz energética nacional.
1.1.1
Topologias de Aerogeradores
A necessidade constante por novas fontes de energias renováveis promove cada vez mais o aumento de investimentos nessa área. Como já foi dito, dentre essas fontes, a ener-gia eólica tem apresentado grande destaque. Torna-se importante promover a busca pelo aprimoramento das tecnologias envolvidas nas topologias de aerogeradores, buscando al-ternativas que aumentem o rendimento obtido, apesar da irregularidade de velocidade do vento [de Oliveira Pinto 2013], [WWEA 2014], [Li et al. 2015].
Figura 1.4: Evolução da capacidade instalada para produção de energia elétrica de fonte eólica no Brasil, numa previsão até o ano 2020. Fonte: http:// brazilenergy.com.br/portfolio/brazil-wind/perfil-do-setor/.
• o tipo de gerador utilizado, síncrono ou assíncrono;
• a conexão à rede elétrica, sendo de forma direta ou através de conversores; • a utilização ou não de caixas de transmissão;
• trabalharem com velocidade fixa ou variável.
Com isso, de acordo com o atual estado da técnica, são utilizados aerogeradores ditos de velocidade variável ou de velocidade constante. Os primeiros dependem de sistemas de conversão eletroeletrônicos para acoplar o aerogerador à rede elétrica, o que causa limitações operacionais em virtude das oscilações de tensões e da qualidade da energia produzida. Além disso, operam de forma dependente das tensões da rede elétrica, sendo desconectados quando esta deixa de operar em função de alguma avaria [Djagarov et al. 2013], [Sharma 2014]. Como exemplo desses tipos de aerogeradores há os que utilizam geradores de indução duplamente excitados (DFIG) e os geradores síncronos multipolos. Já os aerogeradores de velocidade constante com maior razão necessitam de um sis-tema mecânico (multiplicador de velocidade) para compatibilização da velocidade da turbina com a exigida ao gerador diretamente conectado à rede elétrica. Como exem-plo, temos o gerador de indução em gaiola [Zanchettin 2012]. Nele, o estator é conectado diretamente à rede elétrica e, devido ao baixo número de polos, é necessária uma caixa multiplicadora de velocidade. Essa velocidade fixa é determinada pela frequência da rede elétrica e pela variação da carga.
Dentre os principais componentes envolvidos em um sistema de geração de energia eólica, pode-se destacar a turbina eólica, a caixa de trasmissão e o gerador elétrico. A turbina eólica é responsável pela conversão de energia cinética dos ventos em energia mecânica, que será utilizada no gerador. As turbinas são classificadas de acordo com o porte, eixo de rotação (horizontal ou vertical), número de pás, velocidade de operação e controle de potência [Pao & Johnson 2009], [da Silva Costa Duarte 2010].
mecânica fornecida pela turbina em energia elétrica, podendo ser uma máquina síncrona ou uma máquina de indução.
Atualmente são mais conhecidas no mercado cerca de sete tecnologias de sistemas de geração para turbinas eólicas. Os principais tipos de geradores utilizados no mundo são o gerador síncrono multipolar, sem caixa de transmissão e com um melhor aproveitamento da faixa de variação de velocidade do vento e o gerador de indução com rotor bobi-nado, que necessita da caixa de transmissão. Ambos necessitam de conversores estáticos [Pereira et al. 2010].
Dentre essas topologias, serão detalhadas a seguir apenas três, entendendo serem su-ficientes para dar uma boa base das configurações existentes. Tais tecnologias adotam como geradores o gerador de indução com rotor em gaiola de esquilo, o gerador síncrono e o gerador de indução duplamente alimentado ou, em inglês, Double fed induction gen-erator (DFIG).
Gerador de Indução - Rotor em Gaiola de Esquilo
Na configuração apresentada na Figura 1.5, o gerador opera com velocidade fixa. O estator é conectado diretamente à rede elétrica e, devido ao baixo número de polos, é necessária uma caixa multiplicadora de velocidade. Essa velocidade fixa (com uma pequena variação devido ao escorregamento que varia com a carga) é determinada pela frequência do sistema e pelo escorregamento da máquina de indução.
Apesar dessa configuração apresentar vantagens no que diz respeito ao custo de im-plantação, manutenção e à robustez, as possibilidades de controle são bastante reduzi-das. A operação em velocidade fixa impede o aproveitamento da potência máxima para velocidades de vento diferentes da nominal e necessita de uma caixa multiplicadora de velocidade muito sofisticada [de Paula Machado Bazzo 2007], [Blaabjerg et al. 2010], [Zanchettin 2012].
Figura 1.6: Diagrama esquemático ilustrando os principais componentes de um aerogera-dor utilizando um Geraaerogera-dor Síncrono Multipolar.
DFIG
Uma das topologias de maior comercialização mundial é o gerador de indução dupla-mente alimentado - DFIG (Doubly Fed Induction Generator). A Figura 1.7 apresenta de forma esquemática a configuração de um gerador de indução com rotor bobinado, cujo estator é ligado à rede de forma direta e o rotor é conectado na rede elétrica através de um conversor de potência bi-direcional conhecido como back-to-back. Essa configuração trabalha com velocidade variável e necessita de uma caixa de transmissão [Liu 2011], [Zanchettin 2012].
Figura 1.7: Diagrama esquemático ilustrando os principais componentes de um aerogera-dor utilizando um Geraaerogera-dor de Indução Duplamente Excitado
1.2
Estado da Arte
1.2.1
O Problema
Analisando as topologias existentes, nenhuma permite a operação isolada da rede elétrica e pode-se notar que um dos pontos mais importantes do sistema de conversão da energia mecânica para a energia elétrica é o controle de velocidade. A eficiência nesse controle interfere de forma direta na frequência da energia elétrica gerada, na qualidade da energia no ponto de conexão do parque com a rede elétrica e no aproveitamento da energia cinética do vento pela turbina [Nunes 2003], [Ragheb & Ragheb 2010].
As principais alternativas para realizar esse controle de velocidade utilizando a turbina eólica são o controle de estol, um sistema passivo geralmente utilizado em sistema com velocidade fixa e o controle de passo, sistema ativo que regula o ângulo de passo das hélices de acordo com a velocidade do vento. Tais estratégias de controle são projetadas para atuar quando a velocidade do vento excede o valor que proporciona a potência no-minal do gerador, limitando o aproveitamento da energia cinética do vento a este valor.
Dependendo do número de polos do gerador, é necessária a presença de caixa mul-tiplicadora de velocidade, para adaptar a baixa velocidade de rotação da turbina eólica ao eixo de alta velocidade dos geradores convencionais. Por exemplo, considerando as restrições de velocidade na ponta da pá, a velocidade angular das turbinas pode variar na faixa de 20 a 150 rpm., enquanto os geradores convencionais trabalham a rotações elevadas na faixa de 1200 a 1800 rpm. A caixa de transmissão mecânica, que engloba a caixa multiplicadora, tem a finalidade de realizar o acoplamento entre os dois sistemas que operam em velocidades diferentes: o gerador e a turbina.
Segundo [Pereira et al. 2010], é fabricada pela Voith em parceria com DeWind e evita a utilização de conversores nas topologias com geradores síncronos de grandes velocidades. Ainda segundo [Pereira et al. 2010], essa nova tecnologia apresenta algumas vantagens como:
• boa integração à rede elétrica;
• aplicação adequada em situações onshore e offshore para diferentes climas; • não gerar harmônicos;
• maior confiabilidade por não usar conversores estáticos.
Em [Daneshi-Far et al. 2012], são analisados os efeitos do sistema mais tradicional de engrenagens, conhecido como sistemas de engrenagens epicicloidais ou sistemas de engrenagens planetárias. Outra tecnologia, abordada em [Sun et al. 2010], trabalha com um algoritmo de rastreamento de máxima potência em um sistema de transmissão variável de energia elétrica.
Também visando a solução dos problemas relacionados à caixa de transmissão, outros trabalhos foram desenvolvidos, como o Geared Turbofan Engine (GTF), que utiliza uma tecnologia com rolamentos com levitação magnética utilizados na indústria aeroespacial e o Continuously Variable Transmissions (CVTs), da indústria automobilística, que é ca-paz de variar continuamente a velocidade através de um número "infinito"de proporções de engrenagens, diferente da variação discreta entre um número definido de específicas relações de transmissão de uma caixa de velocidades padrão [Ragheb & Ragheb 2010].
Todos esses casos envolvem uma transmissão sofisticada, de custo elevado, manuten-ção frequente e confiabilidade não muito elevada.
1.2.2
Contribuição deste Trabalho
Na realidade, o desenvolvimento do REV partiu justamente da busca por adaptações tecnológicas aos aerogeradores em instalação no Nordeste brasileiro. A observação de que em nossa região, temos ventos muito diferentes (velocidades e direções menos vari-áveis) do que na maioria dos lugares onde as atuais tecnologias têm sido desenvolvidas, foi o ponto de partida para esta concepção.
Diante disto, este trabalho consiste na apresentação do REF. Sendo um equipamento que recebe velocidade variável e entrega velocidade constante, pode ter muitas aplicações. Aqui será apresentado o controle de um aerogerador devido à necessidade e a importância do crescimento da energia eólica apresentadas no início deste trabalho, visando contribuir com uma nova concepção usada no controle de velocidade para aerogeradores e validar a sua eficiência através de simulações e testes experimentais, desenvolvendo uma máquina que se assemelha a uma máquina de indução e que permite ao sistema trabalhar com velocidade variável de vento, mantendo constante a velocidade de saída do sistema pro-posto, realizando, para isso, um controle de velocidade, dispensando o uso da caixa de transmissão atualmente conhecida.
Para essa finalidade, um inversor de frequência é conectado à máquina, injetando cor-rentes para produzir um campo girante de armadura, principal responsável pelo controle de velocidade.
A Figura 1.8 apresenta esquematicamente a topologia de um aerogerador com o Re-gulador Eletromagnético de Frequência (REF). O "estator convencional"da máquina, aqui chamado de rotor assíncrono, será adaptado para que também gire, acompanhando o eixo da turbina eólica. O objetivo é manter constante a velocidade de saídaWrm do rotor da
máquina, aqui denominado de síncrono, para velocidades variáveis do ventoWv. A
des-crição física do sistema proposto e a forma de controle utilizada serão apresentadas no capítulo seguinte.
1.2.3
Potencialidades do REF
Sinergia
Partindo de dois conceitos bastante discutidos na atualidade que são eficiência ener-gética e o uso de energia renovável, considerando-os como pilares para um caminho da sustentabilidade energética, uma das grandes pontecialidades do REF aponta para o con-ceito de sinergia.
Uma das possíveis evoluções do sistema é alimentar as baterias do link dc do inver-sor através de energia oriunda de outras fontes, tais como, painéis solares, células de hidrogênio, diesel ou até mesmo um conjunto de aerogeradores de menor porte, possi-bilitando uma geração integrada e aumentando a eficiência de produção de energia do sistema. Um diagrama esquemático dessa proposta é apresentado na Figura 1.9.
Figura 1.8: Diagrama esquemático ilustrando os principais componentes da tecnologia proposta.
Campos de Estudos
Além da conexão de uma outra fonte de energia ao sistema, outros campos impor-tantes de estudos são apresentados a seguir e detalhados novamente no Capítulo 5, com as propostas de trabalhos futuros.
Com a evolução da montagem, analisar experimentalmente o sistema conectando o gerador síncrono à rede elétrica ou a um simulador de rede Real Time Digital Simulator (RTDS), para validar os resultados de simulação para controle de velocidade do rotor síncrono para variações de carga e de vento, acrescentando testes reais característicos de uma rede elétrica como curto-circuito, falta de fase e sobrecargas.
Após testes com gerador síncrono, deve ser realizada a substituição desse gerador por um gerador de indução e acoplar um filtro ativo para relização da excitação inicial e/ou correção de harmônicos da rede. Um diagrama esquemático dessa proposta é apresentado na Figura 1.10. O mesmo estudo de eficiência deve ser analisado, tanto para variações de vento como de carga, para validar a proposta do REF para outros geradores. Para conectar o aerogerador à rede elétrica, o sistema de controle deverá detectar as tensões da rede e obter, a partir das componentes alfa/beta, o vetor girante a ser sincronizado com as tensões geradas no aerogerador. Ou seja, não será mero controle de frequência ou velocidade, mas, entrará o controle de sincronismo.
ana-Figura 1.9: Diagrama esquemático ilustrando as principais fontes para alimentação da bateria que alimenta o Inversor.
lisam campos magnéticos de estatores convencionais.
Cenários do REF nas Atuais Topologias
É possível perceber que o REF proporciona, nas aplicações em aerogeradores, uma nova concepção tecnológica, através da qual novos modelos de aerogeradores e de par-ques eólicos poderão proporcionar mais eficiência para a produção de energia a partir dos ventos. Este aumento de eficiência deverá resultar em redução de custo da energia elétrica produzida, aumentando a confiabilidade da geração eólica.
Além de contribuir para novos melhores modelos de parques eólicos, o REF deverá proporcionar um sitema inovador do ponto de vista do aerogerador em si, possibilitando o desenvolvimento de um gerador capaz de gerar de forma autônoma (independente da rede elétrica), isolada e contínua.
A semelhança do REF com um motor de indução com rotor em gaiola, assegura a substituição da transmissão mecânica por um equipamento robusto dotado de elevada confiabilidade e rendimento.
Outras consequências tecnológicas do REF são:
• possibilita o uso de gerador síncrono ou de indução convencional (e não multipolar),
o que reduz o custo do equipamento;
• realizar acoplamento direto do gerador com a carga ou rede de CA, dispensando
Figura 1.10: Diagrama esquemático ilustrando a topologia com o Gerador de Indução e o filtro ativo.
• em uma concepção de geração híbrida, o REF proporcionará um sistema no qual
outras fontes energéticas, especialmente que produzem energia em corrente con-tínua, somar-se-ão à energia da fonte eólica, porém, dispensando a necessidade da multiplicidade do controle da injeção de energia na rede elétrica, já que, com ele, todas as fontes de energia injetarão suas contribuições exclusivamente através do gerador acoplado ao REF;
• possibilidade de várias fontes primárias de energia serem utilizadas ao mesmo
2.1
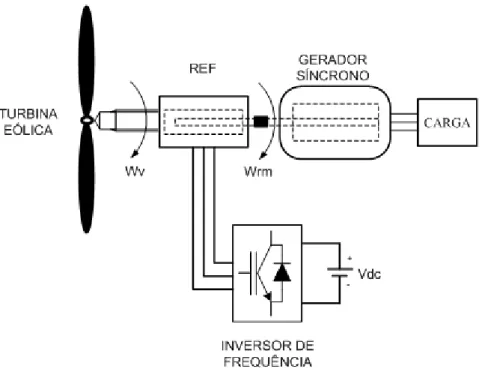
Descrição do Sistema
A Figura 2.1 ilustra a topologia completa utilizada nesta tese. Ela é composta pela turbina, o REF, o gerador síncrono, a carga resistiva, o inversor e uma bateria que pode ser alimentada a partir de outras fontes de energia. O regulador eletromagnético de fre-quência (REF) é derivado de uma máquina de indução com rotor em gaiola de esquilo, com o enrolamento de armadura trifásico acomodado na parte da máquina conhecida como estator, já que numa máquina convencional essa peça é estática. Contudo, neste caso, o enrolamento de armadura gira solidariamente ao eixo da turbina eólica, sendo denominado neste trabalho de rotor assíncrono, apoiado em mancais. Sua utilização irá representar uma vantagem na topologia proposta em relação à robustez e diminuição nos custos de manutenção.
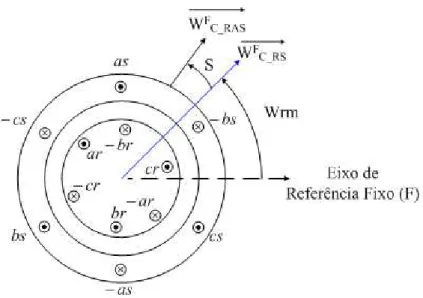
REF
O enrolamento de armadura do rotor assíncrono é alimentado eletricamente através de um inversor de frequência que produz correntes a uma frequência tal que determina a velocidade do campo girante, em relação ao referencial fixo "F", apresentada no dia-grama esquemático da Figura 2.2, como (W−−−−→CF_RAS) que resulta em uma velocidade do rotor síncrono (Wrm), descontando o valor do escorregamento (S), acompanhando o vetor do
campo girante do rotor síncrono (W−−−→CF_RS), no valor da velocidade síncrona desejada no eixo do gerador, como ilustrado no diagrama de posição dos vetores da Figura 2.2. Para valores de vento com velocidades iguais a zero, esse diagrama se assemelha ao princípio de funcionamento de uma máquina de indução convencional.
No caso do sistema proposto, é acrescida ao eixo de referência fixo (F) a velocidade da turbina (Wv), deslocando o rotor assíncrono, resultando em um novo eixo de referência
Figura 2.1: Diagrama esquemático ilustrando a topologia proposta.
girante das correntes injetadas pelo inversor em relação ao eixo do rotor assíncrono é denominado (−−−−−→WCGRA_RAS), como ilustrado no diagrama da Figura 2.3.
O sistema de referência entre o rotor síncrono e o rotor assíncrono permanece equiva-lente ao de uma máquina de indução convencional, encontrado amplamente na literatura. Contudo, o posicionamento relativo entre o rotor síncrono e o eixo de referência fixo passa a ser diferente do convencional, já que o rotor assíncrono sofre um deslocamento vetorial denominado (W−→VF), referente à velocidade da turbina. Com isso, pode-se observar que continua havendo campos estacionários entre o rotor assíncrono e o síncrono, condição essencial para que seja mantido o torque eletromagnético que move o rotor síncrono.
Analisando a Equação 2.1, pode-se perceber que para velocidade de vento nula, temos o sistema tradicional de referência, com o vetor do campo do rotor assíncrono girando com velocidade igual ao vetor do campo girante das correntes nele injetadas, com isso, teríamos a velocidade do campo do rotor assíncrono igual a velocidade do rotor síncrono.
−−−→
Figura 2.2: Diagrama com a ilustração do sistema de referência - máquina convencional.
Figura 2.3: Diagrama com a ilustração do sistema de referência - REF.
Figura 2.5: Diagrama esquemático ilustrando a estrutura mecânica completa.
vos de acionamento mais eficientes para controlar a velocidade de motores de indução. Sobre os tipos de métodos de controle utilizados, existem basicamente dois tipos: controle escalar e o controle vetorial [Santos et al. 2014],[Liu et al. 2010]. De forma resumida, no controle escalar é imposta ao motor uma razão entre tensão e frequência, visando manter essa razão constante, ou seja, manter o fluxo constante, controlando com isso a veloci-dade do motor. É aplicado quando não há necessiveloci-dade de respostas rápidas a comandos de velocidade e de torque.
Inicialmente esse controle foi simulado no sistema proposto, para uma referência de velocidade de 188,5 rad/s com variações do valor de referência em +/- 5%, como mostra o gráfico da Figura 2.7. Os resultados porém não foram satisfatórios, como apresentado no gráfico da Figura 2.8 que mostra a velocidade do rotor síncrono.
Figura 2.7: Gráfico da velocidade de referência - controle escalar.
Como observado no gráfico da Figura 2.9, não foi possivel obter o erro nulo no con-trole de velocidade utilizando o concon-trole tensão/frequência (v/f), sendo alterada a técnica de controle para o vetorial.
Figura 2.8: Gráfico da velocidade Wrm - controle escalar.
Figura 2.9: Gráfico do comportamento do sinal de erro de Wrm - controle escalar.
na literatura, foi utilizada a técnica de controle em quadratura com referencial no fluxo rotórico [Jacobina & Lima 1996].
2.2
Modelagem Matemática
2.2.1
Turbina
Para modelar o sistema, é necessário começar pelo modelo da turbina, e, para isto, recorreu-se à literatura existente, especialmente no que se refere à ação aerodinâmica do vento sobre ela. Para obter tal análise, deve-se levar em conta o comportamento aleatório da velocidade do vento, inclusive pelo efeito de turbulências [Neto et al. 2005], [de Oliveira Pinto 2013].
[Garcia-cp(λ,β) =0.22
λi −0.4β−5 e (2.3)
ondeλié obtido por:
1
λi =
1
λ+0,08β−
0,035
β3+1 (2.4)
e λ é a razão entre a velocidade linear das pontas das pás da hélice e a velocidade do vento, sendo obtida por:
λ= ωr
vW.R (2.5)
onde:
ωr é a velocidade angular da máquina;
βé o ângulo de passo das pás;
vW é a velocidade dos ventos.
A partir das equações descritas anteriormente, pode-se construir o gráfico apresentado na Figura 2.10, que representa a curvacpxλ, para diferentes valores deβ.
Figura 2.10: Coeficiente de potência em funçãoλ.
através dos eixos rotativos da turbina [de Oliveira Pinto 2013]. Quando essa potência é transmitida através do eixo é obtido um torqueTv, calculado pela Equação 2.6.
Tv=C2tρ2πR2vW2 D (2.6)
onde:
Cté o coeficiente de torque da turbina;
Dé o diâmetro externo da turbina;
Tvé torque mecânico de saída da turbina.
2.2.2
REF
As equações que descrevem a modelagem de uma máquina de indução são encon-tradas na literatura [Liu 2011], [Ronconi 2010]. De um modo geral, para se reduzir a complexidade das equações de tensão que descrevem o modelo da máquina, elas são transformadas de um sistema trifásico para um sistema bifásico com eixos estacionários (transformaçãoαβ) e em seguida, em um sistema bifásico com eixos girantes
(transfor-mada de Park), como ilustrado na Figura 2.11. Essa modelagem matemática é muito bem descrita em [Barbi 1985] e serve como base para os resultados obtidos no decorrer deste trabalho.
Figura 2.11: Ilustração demonstrando a Transformação 123 para dq, passando pela Trans-formaçãoαβ.
A transformaçãoαβ permite determinar o vetor bifásico girante, resultante da
com-posição em magnitude, fase e espaço, das tensões (ou correntes) de um sistema trifásico. A finalidade da segunda transformação matemática consiste em viabilizar o controle da máquina de corrente alternada (CA) como se fosse uma máquina CC, já que nessa, os eixos dos enrolamentos da armadura e do campo são sempre ortogonais, equivalentes ao sistema bifásico dq, onde as componentes ortogonais podem ser matematicamente desacopladas dependendo do referencial utilizado, o que significa poder controlá-las de forma independente.
[Rs] = s
0 0 Rs
, [Rr] = r
0 0 Rr
[Lss] e [Lrr] representam de forma matricial as indutâncias próprias do estator e do
rotor, respectivamente. Estas matrizes são:
[Lss] =
Ls Ms Ms
Ms Ls Ms
Ms Ms Ls
, [Lrr] =
Lr Mr Mr
Mr Lr Mr
Mr Mr Lr
(2.9)
[Lsr(θ)]e[Lrs(θ)]representam as indutâncias mútuas entre o estator e o rotor e
depen-dem do ânguloθ, podendo ser calculadas por:
[Lsr(θ)] =Msr
cos(θ) cos(θ+23π) cos(θ+43π)
cos(θ+43π) cos(θ) cos(θ+23π)
cos(θ+23π) cos(θ+43π) cos(θ)
(2.10)
onde[Lsr(θ)] = [Lrs(θ)]t
Partindo do sistema trifásico e utilizando a transformação do sistema para bifásico com eixos estacionários (transformaçãoαβ), é apresentada a seguir a modelagem de uma
máquina de indução nas coordenadasαβ.
Tensões e fluxos no estator para o sistemaαβ:
vsα=Rsisα+dλdtsα vsβ=Rsisβ+
dλsβ
dt
(2.11)
λsα =Lsisα+Lmirα
Tensões e fluxos no rotor para o sistemaαβ:
vrα=0=Rrirα+dλdtrα+ωrλrα vrβ=0=Rrirβ+
dλrβ
dt +ωrλrβ
(2.13)
λrα=Lrirα+Lmisα
λrβ=Lrirβ+Lmisβ (2.14)
onde Rs , Rr , Ls eLr são, respectivamente, as resistências e indutâncias do estator e do
rotor eLmé a indutância mútua.
vsα, vsβ, vrα, vrβ, isα, isβ, irα, irβ, λsα, λsβ, λrα, eλrβ são as componentes αe βdas
tensões, correntes e fluxos do estator e do rotor.
Agora, transformando em um sistema bifásico com eixos girantes (transformada de Park), temos as tensões e fluxos no estator para o sistema bifásico com eixos girantesdq:
vsd=Rsisd+ddtλsd −ωsλsq
vsq=Rsisq+dλdtsq+ωsλsd
(2.15)
λsd=Lsisd+Lmird
λsq=Lsisq+Lmirq (2.16)
Tensões e fluxos no rotor para o sistema bifásico com eixos girantesdq:
vrd=Rrird+ddtλrd−(ωs−ωr)λrq
vrq=Rrirq+ddtλrq+ (ωs−ωr)λrd
(2.17)
λrd=Lrird+Lmisd
λrq=Lrirq+Lmisq (2.18)
onde Rs , Rr , Ls eLr são, respectivamente, as resistências e indutâncias do estator e do
rotor eLmé a indutância mútua.
vsd, vsq, vrd, vrq, isd, isq, ird, irq, λsd, λsq, λrd, e λrq são as componentes d e q das
tensões, correntes e fluxos do estator e do rotor.
O torque eletromagnético é função da derivada parcial da co-energia armazenada nas indutâncias com relação ao deslocamentoθ:
Tmi=∂W(θ,i)
2.2.3
Gerador Síncrono
Para o modelo do gerador síncrono [de Assis Pereira Matias 2007], aplica-se nova-mente a transformação de Park e com isso, as equações de tensão e fluxo no enrolamento do estator do gerador síncrono são:
vd =−rsid+ddtλd −ωrλq
vq=−rsiq+ddtλq+ωrλd
(2.22)
λd=−Ldsid+Lmdif d
λq=−Lqsiq (2.23)
onders,LdseLqs são, respectivamente, a resistência e as indutâncias do estator eLf d é a
indutância do enrolamento de campo.
vd, vq, id, iq, λd e λq são as componentes d e q das tensões, correntes e fluxos do
estator.
A tensão e fluxo no enrolamento de campo do gerador para o sistema bifásico com eixos girantes dq:
vf d =−rf dif d+dλdtf d (2.24)
λf d=−Lmdid+Lf dif d (2.25)
onderf d é a resistência do enrolamento de campo evf d,if d eλf d são, respectivamente, a
tensão, corrente e fluxo do enrolamento de campo.
O torque eletromagnético interno do gerador síncrono (Te), que é também o torque
através do qual o gerador reage ao REF, é definido como:
Com isso, a equação principal do balanço energético do sistema é definida por:
HP2d(ωr)
dt +Jωr=TREF−Te (2.27)
onde H representa o momento de inércia geral do conjunto, P é o número de polos, J
representa a componente de atrito geral do conjunto eTREF é o torque mecânico de saída
do REF.
O torque mecânico de saída do REF é dado pelo somatório do torque eletromag-nético produzido pela máquina de indução adaptada com o torque mecânico produzido pela turbina, sendo definido por:
TREF=Tv+Tmi (2.28)
2.2.4
Adequação da Estratégia de Controle do REF
A partir das Equações do modelo do REF, 2.17 e 2.18, pode-se escrever as seguintes equações dinâmicas, em um referencial genérico, indicado pelo expoente g:
vgr =Rrigr+dλ
g r
dt + (ωg−ωr)λgr (2.29)
λgr =Lrigr+Lmigs (2.30)
Utilizando as Equações 2.29 e 2.30 e relacionando-se o fluxo rotórico e a corrente estatórica:
Lm.Rr
Lr .is
g= λrg.Rr
Lr +
dλrg
dt + (ωg−ωr).λrg (2.31)
Considerando o referencial no fluxo rotórico, a partir de 2.31 e considerando que:
λrdr =λr, λrqr =0 e λs =λr tem-se o modelo das correntes estatóricas em função do fluxo rotórico no referencial fluxo rotórico expresso pelas seguintes equações:
Lm.Rr
Lr .i
r
sd =λrL.rRr+
dλr
dt (2.32)
Lm.Rr
Lr .i
r
sq=ωrλr (2.33)
A Figura 2.12 apresenta em diagrama de blocos a estratégia de controle do sistema.
Figura 2.12: Diagrama de blocos de controle.
Variáveis de Entrada/Leitura
As variáveis de entrada necessárias para realização do controle de velocidade são: as três correntes de saída do inversor que alimenta o rotor assíncrono do REF (ia, ib e
ic), velocidade do rotor síncrono (Wrm), sinal de tensão do barramento dc do inversor
(VDC) e a velocidade do rotor assíncrono (Wv). Na bancada experimental essas variáveis
de leitura são lidas através de sensores, detalhados no próximo capítulo. Através das transformadas de Clark e Park aplicadas nos sinais das correntes, são geradas as correntes nas componentesdq(isd eisq) utilizadas na malha de controle de corrente.
Estimador de Fluxo
a solução adotada para a obtenção do valor do fluxo magnético é a implementação de um estimador baseado no modelo vetorial da máquina referenciado ao fluxo do rotor. A grande vantagem deste estimador é um número reduzido de equações, por utilizar ape-nas as correntes de fase do estator e da velocidade mecânica como parâmetros de entrada, minimizando, assim, o esforço computacional. Na estimação de parâmetros este método é baseado no sistema de referênciadqa partir do modelo do motor de indução, por correntes impostas em coordenadas com referência no fluxo do rotor. O fluxo rotórico estimado uti-lizado neste trabalho é definido pela Equação 2.35, [Zhou et al. 2010], [Patel et al. 2011], calculado a partir da obtenção da correnteisde da indutância mútuaLm.
ˆ
λrest=Lmisd (2.35)
Malha de Controle de Velocidade
O conjugado eletromagnético de referência (T∗
e)é calculado a partir de um controlador
proporcional-integral (PI), resultante do sinal de erro entre a velocidade de referência (W∗
rm) e velocidade de rotação do rotor síncrono (Wrm). O controlador PI apresenta uma
implementação mais fácil, dentro de certas faixas de operação, comparado a outros tipos de controladores e possui ampla aplicação em processos industriais, justificando a sua utilização nessa primeira etapa do projeto [Bazanella & da Silva Júnior 2005], [Liu 2011], [Honda 2013]. Em trabalhos futuros serão sugeridas outras técnicas de controle.
A partir das leituras dos sinais de corrente e da velocidade do rotor síncrono, é cal-culado o ângulo de referência (ˆρ) utilizado para o sincronismo do sistema de controle.
A partir do fluxo estimado e do torque de referência, é obtida a corrente de referência rotórica do eixo q (irsq).
Malha de Controle do Fluxo
A corrente de referência rotórica do eixod (irsd) é calculada a partir de outro contro-lador PI, resultante do sinal de erro entre o fluxo de referência (λ∗
r) e o fluxo rotórico
estimado.
Malha de Controle das Correntes
A partir dos sinais de erros entre as correntes lidas e as correntes rotóricas de refe-rência, são utilizados 2 controladores PI, um para o eixo d e outro para o eixo q, para se obter os sinais de controleV∗
sd eVsd∗. Esses sinais, após passarem pelas transformadas
inversas de Park e Clark, resultam nas tensões de referência (V∗
sa, Vsb∗ eVsc∗) que geram
os sinais PWM (SA, SB e SC) para o acionamento do inversor de frequência [Martins &
Barbi 2008].
A Figura 2.13 apresenta em diagrama de blocos a estratégia de controle do sistema com as funções de transferências de cada bloco/etapa do projeto. O índiceMVDC
Figura 2.13: Diagrama de blocos de controle com as funções de transferência. O programa de simulação foi estruturado conforme ilustrado no fluxograma da Figura 2.14.
2.3
Conclusão
A experimentação prática tem o objetivo de comparar os resultados obtidos na simu-lação. A Figura 3.1 apresenta uma fotografia panorâmica de todo o sistema.
A bancada de ensaios é composta por 3 fontes cc, o protótipo contendo um motor cc, o REF e o gerador síncrono, um inversor trifásico, sensores de condicionamento de sinais de tensão contínua do barramento do inversor, sensores de corrente alternada, sen-sores ópticos de velocidade e placa de condicionamento dos pulsos de acionamento dos drivers do inversor. O DSP utilizado é o DSP TMS320F2812 da Texas Instrument. Após montagem e aferição do seu funcionamento, é iniciada a etapa de testes para a validação experimental proposta neste trabalho.
A seguir, os demais componentes do sistema serão mais detalhadamente descritos.
3.2
Estrutura Laboratorial
Os equipamentos utilizados para a montagem da bancada experimental serão apresen-tados a seguir, destacando as suas características nominais, formas de ligação e limitações.
3.2.1
Protótipo
A Figura 3.2 apresenta a fotografia do conjunto conversor de energia, ou seja, o pro-tótipo do sistema proposto. Dele fazem parte o motor cc, o REF e o gerador síncrono. Um diagrama esquemático do sistema é apresentado na Figura 3.3.
Figura 3.2: Foto ilustrativa do protótipo - detalhamento físico.
Figura 3.3: Diagrama esquemático ilustrando a estrutura de conversão de energia com-pleta.
Motor de Corrente Contínua
Figura 3.4: Fotografia do Motor de Corrente Contínua utilizado para emular a fonte primária de energia.
Figura 3.5: Fotografia do variac utilizado como fonte cc variável.
Os enrolamentos de armadura e de campo foram conectados em série. As caracterís-ticas nominais do motor são apresentadas na Tabela 3.1.
REF
Variável Valor Potência 1,2 cv Velocidade 1800 rpm Tensão 180 V Corrente 6 A
Tabela 3.1: Parâmetros nominais do Motor cc
Variável Valor
Potência 3 cv
Velocidade 3400 rpm
Tensão 220 V
Pares de Polos 1
Resis/Reat. Rotor Síncrono 2,3/3,7Ω
Resis/Reat. Rotor Assíncrono 2,8/3,9Ω
Indut. Mútua 220 mH
Tabela 3.2: Parâmetros medidos do REF
Gerador Síncrono
Nos experimentos aqui apresentados, o gerador síncrono é convencional, sendo seu enrrolamento de armadura localizado no estator, conectado eletricamente a uma carga resistiva. O gerador é visto na fotografia da Figura 3.9. O enrolamento de campo do gerador síncrono é alimentado por uma segunda fonte cc, vista na fotografia da Figura 3.10. É importante destacar o número de polos do gerador, o que justifica o valor de velocidade de referência escolhida para o sistema. Os parâmetros do gerador síncrono estão relacionados na Tabela 3.3. Foram obtidos através de medições e seus valores foram os adotados nas simulações.
Variável Valor Potência 1 cv Velocidade 1800 rpm Pares de Polos 2
Resis/Reat. Síncrona 1,7/4,1Ω
Resis/Reat. de Campo 1,1/2,8Ω
Indut. Mútua 300 mH
Figura 3.6: Fotografia do REF.
Figura 3.7: Fotografia dos anéis coletores do REF.
Quadro de Comando
Para realizar o acionamento do sistema, foi montado um quadro de comando, cuja fotografia é vista na Figura 3.11.
O circuito de comando do quadro é apresentado no Apêndice A.5. De um modo geral, o quadro possibilita os seguintes procedimentos:
• B0 - Emergência - Desliga todo o sistema de alimentação do conjunto; • B1 - Liga/desliga o varivolt-1, responsável pela alimentação do motor cc;
• B2 - Liga/desliga o varivolt-2, responsável pela alimentação do link dc do
barra-mento do inversor.
3.2.2
Bloco dos Sensores
A Figura 3.12 apresenta a fotografia do bloco de sensoriamento utilizado no projeto. Os diagramas esquemáticos dos sensores são mostrados no Apêndice A.
Figura 3.8: Fotografia de uma das três escovas utilizada para o acesso elétrico do REF.
Figura 3.9: Fotografia do Gerador Síncrono utilizado no protótipo.
• (1) Fonte de Tensão cc de 5 V;
• (1) Fonte de Tensão Simétrica cc +/- 15 V; • (1) Sensor de Tensão cc;
• (6) Sensores de Tensão ca; • (6) Sensores de Corrente ca.
Os sensores recebem o sinal do sistema por dispositivos de efeito Hall (sensores de corrente e sensor de tensão cc do capacitor) e por transformadores de tensão (sensores de tensão ca). Em seguida, o sinal é filtrado através de capacitores e condicionado para uma faixa de operação de modo a torná-los acessíveis à leitura do canal analógico/digital (AD) do DSP. No caso, um sinal entre 0V e 3,3V. Todas as saídas dos sensores apresentam um sinal de offset de 1,5 V.
O sensor de tensão cc do capacitor está calibrado para leituras de 0 a 400 V e os sensores de corrente estão calibrados para correntes de até 5A.
Figura 3.10: Fotografia da fonte cc utilizada para alimentação do enrolamento de campo do gerador síncrono.
Sensor de Velocidade
O sensor de velocidade é um dos principais sensores desse bloco, já que é responsável pelo leitura da principal variável de controle, a velocidade do rotor síncrono (Wrm). O
desenho do disco utilizado no encoder é apresentado nas Figuras 3.13 e 3.14 e o circuito elétrico do sensor é apresentado nos diagramas esquemáticos dos Apêndices A.3 e A.4.
Como exemplo de procedimento para se obter a calibração do sensor de velocidade, inicialmente é comparada a velocidade do rotor síncrono via tacômetro com a saída de tensão do sensor de velocidade, como mostra o gráfico da Figura 3.15. Em seguida, é comparada a velocidade do rotor síncrono em relação ao sinal obtido do canal de leitura de entrada do DSP, ajustando os ganhos internos via programação, para obter o valor em rad/s, usado na lógica de controle, como apresentado no gráfico da Figura 3.16, confir-mando a linearidade do sensor dentro da faixa de operação.
Alguns filtros passa-baixa foram inseridos nos sensores devido a problemas com in-terferências provocadas pelo chaveamento dos IGBT’s.
3.2.3
Interface de Comando dos Pulsos
Figura 3.11: Fotografia do quadro de acionamentos para os chaveamentos necessários ao funcionamento do sistema.
na Figura 3.18. A placa apresenta seis saídas condicionadas, mas são utilizadas apenas 3 delas.
O driver consiste em um dispositivo que recebe o sinal do circuito de controle e co-manda os IGBTs, através de níveis de tensão em +15Vcc para Turn on (liga) e -7Vcc para Turn off (desliga), com dead band (tempo morto) pré-definido de fábrica para 3,25 µs. Cada módulo fornece o interfaceamento completo com os IGBT’s de um braço da ponte do inversor. Pontos de acesso permitem também que se programem alguns parâmetros do módulo. Um diagrama esquemático do módulo SKHI22A encontra-se na Figura A.4 do Apêndice.
3.2.4
Inversor
Figura 3.12: Bloco de sensores.
3.2.5
Carga Resistiva
A carga resistiva acoplada ao gerador síncrono é formada por um banco de 9 resistores de potência, com potência máxima de aproximadamente 1 kW. Um dos resistores do banco é apresentado na fotografia da Figura 3.20.
3.2.6
Aquisição de Dados
Para obtenção dos sinais de velocidade é utilizada a placa NI USB-6008 da National Instrument, realizando a aquisição dos sinais na saída dos sensores de velocidade, apre-sentada na fotografia da Figura 3.21.
3.3
Recursos Computacionais
O comportamento do sistema proposto foi primeiramente testado através de simu-lações numéricas. Foi utilizado o software Borland C++. Com isso, pôde-se melhor dimensionar o sistema experimental. Os resultados de simulação serão apresentados no próximo capítulo, assim como os experimentais. Para a implementação prática, foi uti-lizado o DSP - TMS320F2812, detalhado a seguir.
3.3.1
DSP - TMS320F2812
Introdução
pro-Figura 3.13: Desenho do disco do encoder utilizado no sensor de velocidade - vista supe-rior.
Figura 3.14: Desenho do disco do encoder utilizado no sensor de velocidade - vista isométrica.
gramação (code composer). O dispositivo utilizado foi o DSP TMS320F2812, da Texas Instruments e é apresentado na Figura 3.22.
Descrição do Módulo DSP
O módulo escolhido para o sistema, desenvolvido comercialmente pela Spectrum Digital foi o eZdspF2812, o qual foi arquitetado sobre o processador digital de sinais TMS3202812 de 32 bits da Texas Instruments sob a arquitetura de ponto fixo em hard-ware, como mostrado na Figura 3.23.
onde:
P1−Interface JTAG;
P2−Pinos de Expansão;
Figura 3.15: Gráfico de calibração da velocidade do rotor síncrono com a saída do sinal do sensor de velocidade.
Figura 3.16: Gráfico de calibração da velocidade do rotor síncrono com o sinal do canal de leitura do DSP.
P4/P8/P7−Interface de entrada e saída; P5/P9−Interface Analógica;
P6−Fonte de Alimentação.
A família C28x apresenta uma excelente capacidade de processamento, altas taxas de transferência de dados e baixo custo dos recursos integrados, tornando-se um ótimo dispositivo para ser usado em diversos sistemas embarcados.
Ambiente de Programação
Figura 3.17: Fotografia da placa de condicionamento dos pulsos PWM.
onde o mesmo pode ser programado através das linguagens C/C++ e assembler.
Sinal de Entrada para o DSP
A Figura 3.24 representa o sinal de tensão dc do barramento do inversor após a leitura realizada pelo DSP dos sinais recebidos pelo bloco de sensores, servindo para calibrar e testar os ganhos dos sensores e ganhos internos de programação.
3.4
Conclusão
Figura 3.18: Fotografia da placa de condicionamento conectada aos Drivers.
Figura 3.20: Resistor de potência utilizado no banco de carga resistiva.
Figura 3.21: Fotografia da placa de aquisição de dados da National Instruments.
Figura 3.23: Desenho proporcionando uma visão geral do módulo DSP
O estudo de desempenho da nova concepção proposta nesse trabalho foi avaliado ini-cialmente através de simulações. Para realização dos testes foi implementado um pro-grama de simulação escrito em linguagem C/C++. A Figura 4.1 apresenta um diapro-grama esquemático contendo os componentes que foram simulados e a forma de operação es-tudada. Esses resultados foram divididos em 2 etapas: a primeira mostra o sistema pro-posto completo, analisando o controle de velocidade e o fluxo de potência em cada eixo principal (turbina, conversor, REF e carga), calculando a eficiência total, considerando variações de vento e carga e a segunda etapa mostra o desempenho no controle de veloci-dade do REF para diferentes condições de vento, comparando com os resultados práticos obtidos, apresentados na seção seguinte.
4.1.1
Sistema Completo - Análise de Fluxo de Potência e Controle de
Velocidade
Vento
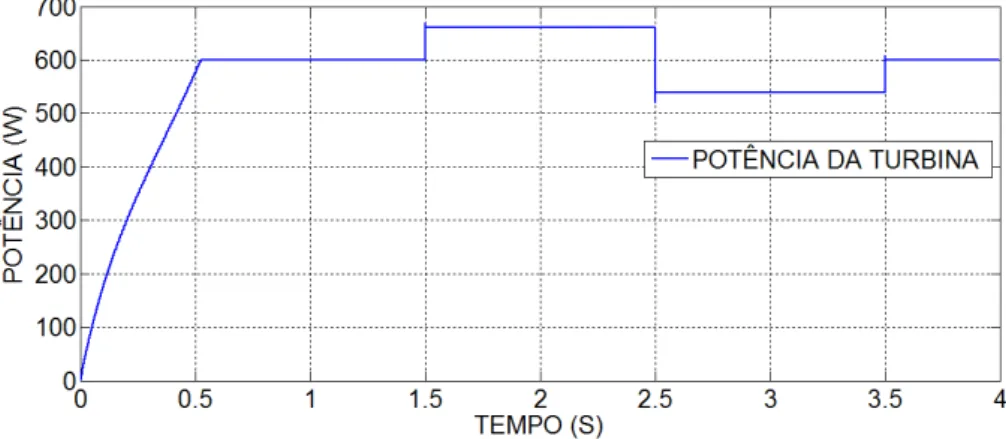
O gráfico da Figura 4.2 representa o comportamento da potência da turbina em função da velocidade do vento que foi utilizada nas simulações. Inicialmente, o sistema foi si-mulado em uma situação de vento constante com velocidade aproximada de 11m/s, resul-tando em uma potência injetada pela turbina eólica no valor de 600 W, como apresentado no gráfico da Figura 4.3. Uma carga resistiva e de valor constante é conectada ao estator do gerador síncrono.
Velocidade do Vento e Carga Constantes
Figura 4.1: Diagrama esquemático ilustrando a topologia adotada nas simulações.
Figura 4.3: Gráfico do comportamento da potência de saída da turbina eólica.
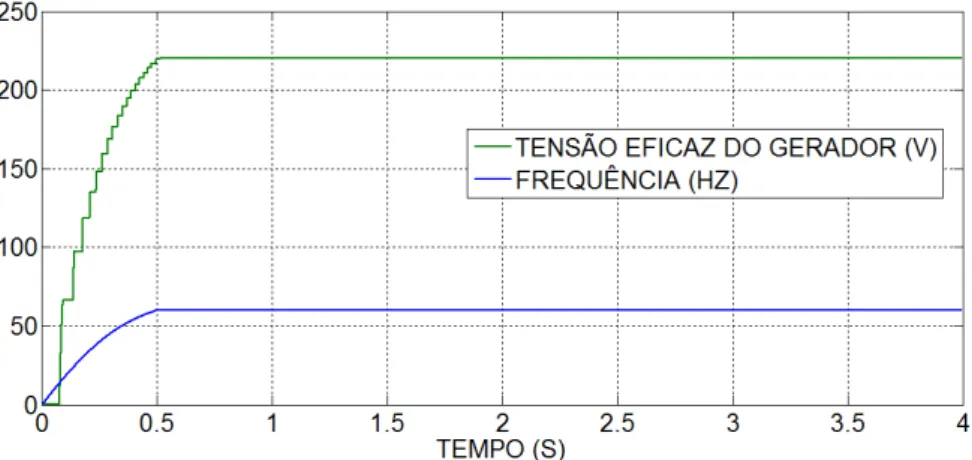
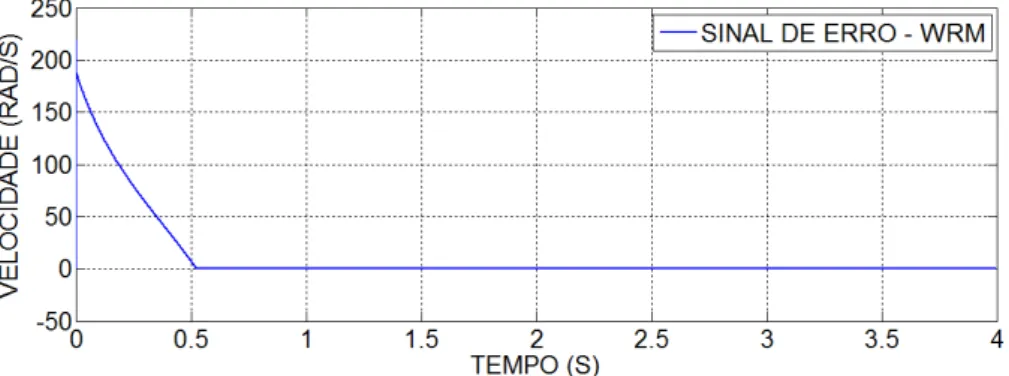
observado, o sistema apresenta erro praticamente nulo em regime permanente, o que se vê através do gráfico da Figura 4.5. Outro ponto importante foi a obtenção da tensão eficaz de saída no valor de 220 V e frequência de 60 Hz, como mostram os gráficos da Figuras 4.6 e 4.7.
Figura 4.4: Gráfico da velocidade Wrm e velocidade de referência.
Análise de Fluxo de Potência
Figura 4.5: Gráfico do comportamento do sinal de erro de Wrm.
Figura 4.6: Gráfico da tensão eficaz e frequência de saída do Gerador Síncrono.
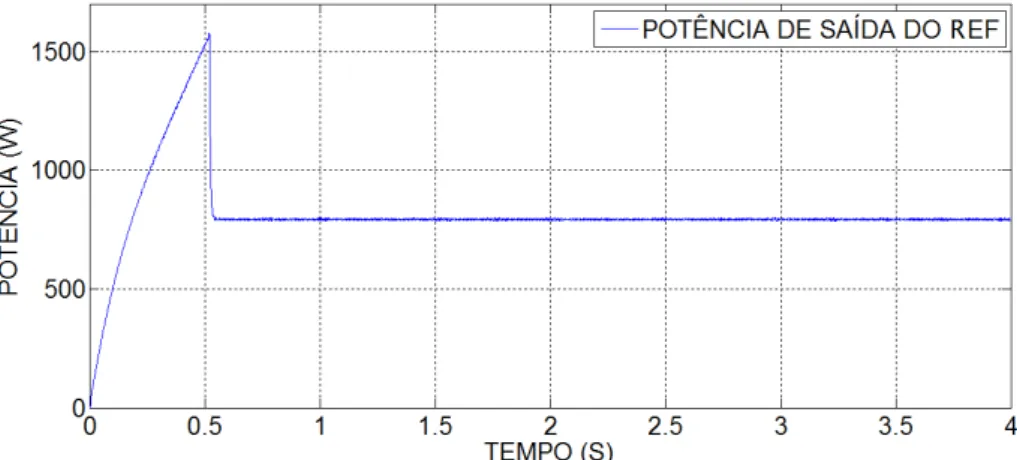
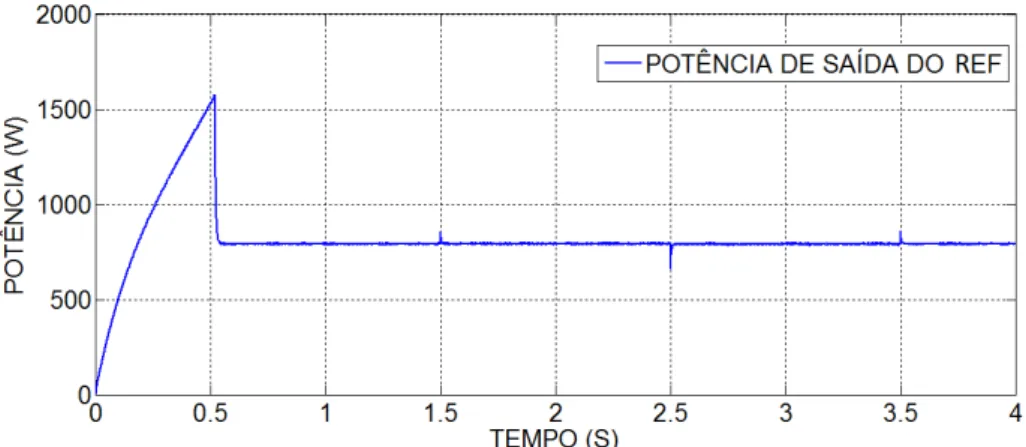
Figura 4.8: Diagrama esquemático ilustrando os fluxos de potências analisados. Como se vê no gráfico da Figura 4.11, a potência de saída do sistema é de aproxima-damente 626 W. Considerando o sistema isolado, os 600 W de potência fornecida pela turbina eólica e os 200 W injetados pelo inversor, resultaram em 800 W de potência de entrada para os 626 W de saída, representando um rendimento do sistema no valor de 78,25%. O resumo do fluxo de potência é apresentado na Tabela 4.1.
Eixo de Saída Potência Turbina 600W Inversor 200W
REF 800W
Gerador 626W
Figura 4.9: Gráfico do comportamento da potência de saída do Inversor.
Figura 4.10: Gráfico do comportamento da potência de saída do REF.
Figura 4.12: Gráfico mostrando a variação da resistência de carga.
Analisando as Figuras 4.13 e 4.14, pode-se observar que o sistema manteve a veloci-dade de referência e que o erro permaneceu praticamente nulo para variações de carga na saída do gerador, o que valida o controle de velocidade do sistema. Novamente foram obtidas a tensão eficaz de saída no valor de 220 V e frequência de 60 Hz, como mostram os gráficos das Figuras 4.15 e 4.16.
Figura 4.13: Gráfico apresentando a velocidade Wrm e velocidade de referência.
Velocidade do Vento Variável e Carga Constante
Figura 4.14: Gráfico do comportamento do sinal de erro de Wrm.
Figura 4.15: Gráficos dos comportamentos da tensão eficaz e frequência de saída do Gerador Síncrono.
Figura 4.17: Gráfico apresentando a variação de potência de saída da Turbina Eólica.
Figura 4.18: Gráfico do comportamento da velocidade Wrm e velocidade de referência.
Análise de Fluxo de Potência