Estabilidade de Liapunov e derivada radial
Gerard John Alva Morales
TESE APRESENTADA
AO
INSTITUTO DE MATEM ´ATICA E ESTAT´ISTICA
DA
UNIVERSIDADE DE S ˜AO PAULO
PARA
OBTENC¸ ˜AO DO T´ITULO
DE
DOUTOR EM CIˆENCIAS
Programa: Matem´atica Aplicada
Orientador: Prof. Dr. Manuel Valentim de Pera Garcia Durante o desenvolvimento deste trabalho o autor recebeu
aux´ılio financeiro do CNPq.
Estabilidade de Liapunov e derivada radial
Esta tese corresponde `a reda¸c˜ao final devidamente corrigida e defendida por Gerard John Alva Morales, e aprovada pela Banca Examinadora.
S˜ao Paulo, 31 de Outubro de 2014
Banca Examinadora:
Prof. Dr. Manuel Valentim de Pera Garcia (Orientador) -IME-USP
Prof. Dr. F´abio Armando Tal -IME-USP
Prof. Dr. Ricardo dos Santos Freire Jr. -IME-USP
Prof. Dr. Ricardo Miranda Martins -IMECC-UNICAMP
Dedico este trabalho a:
Agradecimentos
Agrade¸co:
A minha fam´ılia, pelo apoio moral, pelos ensinamentos, pelo carinho, pela confian¸ca e pela for¸ca incondicional que me proporcionaram em todo momento; em particular durante este per´ıodo no doutorado. Meu carinho e especial considera¸c˜ao para: Isadora Silva Alva Morales, Adriana Maria Silva Morales, Marco Ascenci´on Alva Castillo, Mercedes Georgina Morales de Alva e Miriam Edith Alva Morales.
A meu orientador, Prof. Dr. Manuel Valentim de Pera Garcia, pela aceita¸c˜ao como seu aluno de doutorado no programa de matem´atica aplicada em momentos cr´ıticos na minha forma¸c˜ao acad´emica, pela generosidade em compartilhar comigo a matem´atica sutil que ele estuda, pela orienta¸c˜ao e pelas valiosas sugest˜oes que tornaram poss´ıvel esta tese. `A Profa. Dra. Sˆonia Regina Garcia, pelas corre¸c˜oes do portuguˆes e sugest˜oes que deram maior est´etica a este trabalho.
As sugest˜oes da banca examinadora durante a defesa de esta tese o qual permitiu consider´avel melhoramento na reda¸c˜ao da mesma.
Aos amigos, Prof. Dr. Jorge Manuel Sotomayor Tello, pela cama-radagem proporcionada em momentos de descontra¸c˜ao no IME, FEA-USP durante a homenagem `a Profa. Dra. Marilda Sotomayor e pelas con-versa¸c˜oes sobre equa¸c˜oes integro-diferenciais singulares, Prof. Dr. Alexan-dre Patriota Galv˜ao, pelas conversa¸c˜oes de caracter filos´ofico durante repeti-das tardes de caf´e, Dr. Pedro Losco Takecian, pela cordialidade e pelas sugest˜oes t´ecnicas sobre Ubuntu, ambiente onde preparei esta tese.
A hospitalidade dos departamentos de matem´atica e matem´atica apli-cada do IME-USP que facilitaram o desenvolvimento desta tese, e o aux´ılio financeiro do CNPq.
Resumo
Apresentaremos uma classe de energias potenciais Π ∈ C∞(Ω,R) que s˜ao s−decid´ıveis e que admitem fun¸c˜oes auxiliares de ˇCetaev da forma
h∇jsΠ(q), qi,q∈Ω⊂Rn que s˜ao s−resistentes.
Abstract
We will present a class of potential energies Π ∈ C∞(Ω,R) that are s−decidable and that admit auxiliary functions of ˇCetaev of the formh∇jsΠ(q), qi, q∈Ω⊂Rn which ares−resistant.
Conte´
udo
1 Introdu¸c˜ao 9
2 Preliminares, o problema e um lema 13
2.1 Fun¸c˜oess-decid´ıveis . . . 13
2.2 Formula¸c˜ao do problema . . . 14
2.2.1 O problema . . . 16
2.3 Lema fundamental . . . 17
3 Cones tangentes e s-resistˆencia 21 3.1 O coneZs−1 . . . 21
3.2 Construindo o coneKs . . . 23
3.3 s-resistˆencia de Ps . . . 34
4 Aplica¸c˜oes da s-resistˆencia de Ps 39 4.1 Instabilidade do equil´ıbrio segundo Liapunov . . . 39
4.1.1 Hip´oteses (H1)−(H3) . . . 39
4.1.2 Hip´oteses (H11)−(H3) . . . 40
4.1.3 Hip´oteses (H2 1)−(H3) . . . 41
4.2 An´alise da hip´otese (H1) . . . 42
4.3 Existˆencia de trajet´orias assint´oticas . . . 46
Cap´ıtulo 1
Introdu¸
c˜
ao
Neste trabalho, estamos interessados em estudar a estabilidade segundo Liapunov de um equil´ıbrio (q0, p0) ∈ Rn×Rn do sistema mecˆanico comn
graus de liberdade, cuja dinˆamica ´e governada pelo sistema hamiltoniano
XH(q, p)
˙
q = ∂H∂p(q, p)
˙
p=−∂H∂q(q, p)
com hamiltoniana H(q, p) = T(q, p) + Π(q), (q, p)∈ Ω×Rn, onde Ω ⊂Rn ´e uma vizinhan¸ca aberta de q0. Admitiremos que a energia cin´eticaT(q, p)
´e uma forma quadr´atica definida positiva na vari´avelp, assim, podemos ver que os equil´ıbrios deste sistema, isto ´e, os pontos tais queXH(q0, p0) = (0,0),
s˜ao os pontos (q0,0), em queq0 ´e um ponto cr´ıtico de Π.
O teorema de Dirichlet-Lagrangeafirma que, se emq0a energia potencial
Π tem um m´ınimo estrito local, ent˜ao o equil´ıbrio (q0,0) do sistema XH ´e
est´avel.
O seguinte exemplo com 1 grau de liberdade com hamiltoniana definida em R×R
T(q, p) = 1 2p
2, Π(q) =
e−1/q2cos(1/q) , q 6= 0
0 , q = 0
mostra que a rec´ıproca do teorema de Dirichlet-Lagrange ´e falsa, pois neste caso a origem (q0,0) = (0,0) ´e est´avel mas Π(q) n˜ao tem m´ınimo emq0= 0.
Apesar deste exemplo, a situa¸c˜ao de sistemas com um grau de liberdade (n = 1) ´e a ´unica em que a estabilidade do equil´ıbrio ´e caracterizada de forma completa por propriedades da energia potencial.
10 CAP´ITULO 1. INTRODUC¸ ˜AO
De fato, se n = 1, a origem (0,0) ´e est´avel segundo Liapunov se, e s´o se, existem sequˆencias (q+n) e (qn−), convergentes para 0, (qn+) estritamente decrescente, (q−
n) estritamente crescente, tais que Π(qn+) > 0 e Π(q−n) > 0
(para uma demonstra¸c˜ao veja [LHR]).
Em termos topol´ogicos, esta condi¸c˜ao para n = 1 pode ser reescrita assim, “ para sistemas com um grau de liberdade, a origem (0,0) ´e est´avel segundo Liapunov se, e s´o se, existe um sistema fundamental de vizinhan¸cas da origem, (Un), tal que Π(q)>0,∀q∈∂Un, para todon∈N”.
Durante algum tempo acreditou-se que a condi¸c˜ao acima caracterizasse a estabilidade da origem para o caso geral de sistemas comngraus de liber-dade, entretanto, embora esta seja efetivamente uma condi¸c˜ao suficiente para a estabilidade da origem, ela n˜ao ´e necess´aria, conforme se vˆe pelo exemplo abaixo, devido a Laloy (1977), para o caso de dois graus de liberdade.
Considere em R2×R2,T(q, p) = 1
2(p21+p22) e Π(q) a fun¸c˜ao
Π(q1, q2) =
e− 1
q21 cos(1
q1)−e
−1
q22q2
2+ cos(q12)
, q1q2 6= 0
0 , q1q2 = 0.
Note que, na verdade, Π ´e de classeC∞. Aqui, o equil´ıbrio (q0,0) = (0,0)
do sistema XH ´e est´avel, mas na reta {q2 = q1}, tem-se para q1 6= 0,
Π(q1, q1) =−q12e−1/q
2 1 <0.
Nos dois exemplos anteriores Π ´e uma fun¸c˜ao C∞, mas n˜ao anal´ıtica, de fato, todas as derivadas de Π em 0 anulam-se. No contexto de fun¸c˜oes anal´ıticas o problema da estabilidade de Liapunov de um equil´ıbrio est´a discutido em [P].
Neste trabalho estudamos um problema que na literatura (ver por exem-plo [LHR]) ´e conhecido como invers˜ao do teorema de Dirichlet-Lagrange e consiste em estabelecer condi¸c˜oes suficientes sobre a energia potencial para nosso sistemaXH que garantam a instabilidade do equil´ıbrio (q0,0) = (0,0)
deste sistema hamiltoniano.
Existem muitos trabalhos relevantes abordando este problema (por ex-emplo [LP], [MN], [GT] e [FGT]), mas o problema ainda n˜ao tem uma completa solu¸c˜ao para o caso geral den graus de liberdade.
Um dos primeiros resultados nesta dire¸c˜ao foi mostrado pelo pr´oprio A.M. Liapunov, e mostra que: se a matriz hessiana de Π em q0 mostra que
Π n˜ao tem m´ınimo nesse ponto, ent˜ao (q0,0) ´e um equil´ıbrio inst´avel do
sistema XH. Utilizando a linguagem de jatos pontuais, introduzida por A.
11
ordem 2 de Π em q0 mostra que a energia potencial Π n˜ao tem m´ınimo em
q0, ent˜ao o equil´ıbrio(q0,0) do sistema hamiltoniano XH ´e inst´avel.
Na classe de energias potenciais Π que admitem jatos de ordens≥2 no ponto cr´ıtico q0, a generaliza¸c˜ao natural deste resultado ´e a:
Conjectura (Liapunov-Barone)
Se para algum natural s ≥ 2, o jato de ordem s de Π em q0 mostra que
a energia potencial Π n˜ao tem m´ınimo em q0, ent˜ao o equil´ıbrio (q0,0) do
sistema hamiltoniano XH ´e inst´avel.
No caso em que o jato de ordem sde Π ´e um polinˆomio homogˆeneo, no contexto dengraus de liberdade, o artigo [MN] mostra, usando a teoria da variedade est´avel, que, o equil´ıbrio (q0,0) do sistemaXH, ´e inst´avel.
No artigo [GT] mostrou-se que esta conjectura ´e verdadeira no contexto de 2 graus de liberdade, e em [FGT] mostrou-se parcialmente, que a con-jectura ´e verdadeira no contexto geral de ngraus de liberdade. Nestes dois resultados usaram-se fun¸c˜oes auxiliares como ferramenta b´asica.
Tanto no trabalho [MN] como em [GT] e [FGT] demonstrou-se n˜ao ape-nas a instabilidade de (q0,0), mas a existˆencia de trajet´orias assint´oticas
para esse equil´ıbrio.
Outro resultado cl´assico neste problema ´e um teorema de ˇCetaev que garante a instabilidade de (q0,0) se existe uma componente conexa do
con-junto Π−1(−∞,0) aderente aq
0 em que a derivada radial de Π,h∇Π(q), qi,
´e estritamente negativa (se Π tem essa propriedade diremos que Π ´e um potencial de tipo ˇCetaev).
Neste trabalho consideramos uma quest˜ao que relaciona estas duas for-mas de abordar o problema da invers˜ao do teorema de Dirichlet-Lagrange, mais precisamente, admitiremos que jsΠ mostra que q0 n˜ao ´e ponto de
m´ınimo de Π e que jsΠ ´e um potencial de tipo ˇCetaev (isto ´e, suporemos que a derivada radial de jsΠ, h∇jsΠ(q), qi ´e estritamente negativa numa
componente conexa de (jsΠ)−1(−∞,0)), e procuramos determinar situa¸c˜oes em que isto garantisse que Π ´e um potencial de tipo ˇCetaev (e portanto a instabilidade de (q0,0) fica provada).
Conseguimos assim determinar uma classe de energias potenciais em que a instabilidade da origem ´e garantida por jatos.
O resultado central do trabalho (veja o Teorema 4.1.1) afirma, em lin-guagem um pouco livre (para defini¸c˜oes precisas veja a se¸c˜ao 2.1) que se a energia potencial Π : Ω→ R, Ω⊂Rn aberto com 0 ∈Ω, ´e suficientemente regular e tem um ponto cr´ıtico na origem, com Π(0) = 0, satisfaz:
(H1) Paraℓ≤s−1, jℓΠ(q)≥0 para q numa vizinhan¸ca da origem.
12 CAP´ITULO 1. INTRODUC¸ ˜AO
(H3) Existeε >0 tal que
{q∈Rn|jsΠ(q)<0,|q|< ε} \ {0} ⊂ {q ∈Rn|h∇jsΠ(q), qi<0,|q|< ε}.
Ent˜ao Π ´e um potencial de tipo ˇCetaev.
Isso mostra que nos sistemas XH em que as energias potenciais
satis-fazem (H1), (H2) e (H3) o ponto (0,0) ´e inst´avel segundo Liapunov, o que
justifica nossa afirma¸c˜ao anterior sobre caracterizar uma classe de potenciais em que a instabilidade ´e garantida por jatos.
Os resultados obtidos neste trabalho garantem al´em da instabilidade da origem do sistema XH, a existˆencia de trajet´orias assint´oticas `a origem de
XH.
As hip´oteses (H2) e (H3) feitas sobre Π s˜ao, em um sentido que expomos
no texto, bastante naturais neste contexto. J´a a hip´otese (H1) parece, `a
primeira vista, um pouco restritiva demais, por´em mostramos na se¸c˜ao 4.2 que, enfraquecendo um pouco essa hip´otese, a conclus˜ao do nosso resultado central n˜ao se mantem.
Cap´ıtulo 2
Preliminares, o problema e
um lema
O objetivo deste cap´ıtulo ´e apresentar nosso problema e tamb´em apre-sentar um lema que ser´a fundamental no resto do trabalho.
2.1
Fun¸
c˜
oes
s
-decid´ıveis
No espa¸co euclidiano (Rn,| · |) com a norma usual, consideramos uma vizinhan¸ca aberta da origem Ω e denotamos por B(q0, ε) o conjunto aberto
B(q0, ε) ={q∈Rn| |q−q0|< ε}.
Quando q0 = 0, simplesmente denotaremos esta bola por Bε.
Como ´e usual, para fun¸c˜oes f, g : Ω → R em que g(q) 6= 0 se q 6= 0, a nota¸c˜ao f =o(g) em 0 significa que
lim
q→0
f(q) g(q) = 0.
Defini¸c˜ao 2.1.1 Sejam s um natural n˜ao nulo eΩ uma vizinhan¸ca aberta da origem de Rn. Dizemos que uma fun¸c˜ao f : Ω→R tem jato pontual de ordems na origem, se existe um polinˆomio de grau menor ou igual as, que denotamos por jsf, tal que
f(q) =jsf(q) +o(|q|s).
Observa¸c˜ao 2.1.2 E simples ver que existe no m´´ aximo um polinˆomio que satisfaz estas condi¸c˜oes e, se f for de classe Cs, ent˜ao f tem jato pontual de ordem sna origem ejsf ´e o polinˆomio de Taylor de ordemsde f em0.
14 CAP´ITULO 2. PRELIMINARES, O PROBLEMA E UM LEMA
Denotemos porJs(Ω,R) o conjunto das fun¸c˜oes f : Ω→ R, comf(0) = 0, que admitem jato pontual de ordemsna origem.
Diremos quef tem um m´ınimo forte (respectivamente um m´aximo forte) na origem se existeε >0 tal que f(x)>0 (respectivamente f(x)<0) para todox∈(Ω\ {0})∩Bε; diz-se quef tem um m´ınimo fraco (respectivamente
um m´aximo fraco) na origem se existe ε >0 tal que f(x) ≥0 (respectiva-mentef(x)≤0) para todox∈Ω∩Bε e existe uma sequˆencia (xk),xk 6= 0,
comxk →0 ef(xk) = 0.
Nestes casos diz-se quef tem extremo forte, ou extremo fraco, na origem. Se f n˜ao tem extremo forte ou fraco na origem, diremos quef tem sela na origem.
Diz-se que as fun¸c˜oes f : Ω → R e g : Ω → R tˆem mesmo compor-tamento em rela¸c˜ao a extremo na origem se f e g tiverem ambas m´ınimo forte (respectivamente m´aximo forte) na origem, ou ambas tiverem m´ınimo fraco (respectivamente m´aximo fraco) na origem, ou ambas tiverem sela na origem.
Defini¸c˜ao 2.1.3 Uma fun¸c˜ao f ∈ Js(Ω,R) ´e s-decid´ıvel se, para cada
fun¸c˜ao g ∈ Js(Ω,R) tal que jsf = jsg, tem-se que ambas as fun¸c˜oes f eg possuem o mesmo comportamento em rela¸c˜ao a extremo na origem.
Denotamos por Ds(Ω,R) a classe de fun¸c˜oes f ∈ Js(Ω,R) s-decid´ıveis na
origem. Uma consequˆencia direta desta defini¸c˜ao ´e que, se f ∈ Ds(Ω,R), ent˜ao na origem 0, f tem extremo forte ou uma sela, conforme se vˆe na observa¸c˜ao abaixo.
Observa¸c˜ao 2.1.4 Se f ∈ Jr(Ω,R) e jrf tem na origem um extremo
brando, ent˜ao f /∈Dr(Ω,R). Para ver isto, basta supor, sem perda de
gen-eralidade que jrf tem m´ınimo fraco e considerar a fun¸c˜ao g(q) :=jrf(q) +
|q|2r ∈ Jr(Ω,R); observemos que enquanto jrf tem m´ınimo fraco, g tem m´ınimo forte na origem; e se considerarmosg(q) :=jrf(q)−|q|2r∈Jr(Ω,R),
g tem uma sela na origem (ou m´aximo, caso f ≡0).
Mais detalhes acerca des-decidibilidade podem ser vistos em [B] ou [G].
2.2
Formula¸
c˜
ao do problema
Sejam dois n´umeros naturais k e s, com 2 ≤ k < s, e consideremos fun¸c˜oes f ∈Js(Ω,R) cujo primeiro jato n˜ao nulo ´e o de ordem k. Ent˜ao o jato de ordemsde f na origem, pode ser escrito da seguinte forma
2.2. FORMULAC¸ ˜AO DO PROBLEMA 15
onde, para cada ℓ∈ {k, ..., s},fℓ(q) =jℓf(q)−jℓ−1f(q). Note que fℓ ´e um
polinˆomio ℓ−homogˆeneo (isto ´e, fℓ(λq) =λℓfℓ(q), para todo λ ∈R e para
todo q ∈Rn), chamada parte homogˆenea de grau ℓ de jsf. Veja ainda que fk =jkf.
Estamos interessados em energias potenciais cujo jato de ordemsmostra que esta fun¸c˜ao n˜ao tˆem m´ınimo na origem, mais precisamente isto ´e for-malizado na defini¸c˜ao abaixo.
Defini¸c˜ao 2.2.1 Dada uma fun¸c˜ao f ∈ Js(Ω,R), dizemos que o jato jsf mostra quef n˜ao tem m´ınimo na origem se, para cada fun¸c˜aog∈Js(Ω,R) com jsf =jsg, tem-se que g n˜ao tem m´ınimo na origem.
Observa¸c˜ao 2.2.2 Note que o fato dejsf mostrar que f n˜ao tem m´ınimo
na origem n˜ao implica quef ´es-decid´ıvel, por exemplo, sej2f(x, y) =−x2, claro que esse jato mostra que f n˜ao tem m´ınimo na origem, mas f n˜ao ´e 2-decid´ıvel, pois j2f tem m´aximo n˜ao estrito na origem. Entretanto se o
primeiro jato n˜ao nulo de f na origem tem m´ınimo fraco nesse ponto ejsf
mostra que f n˜ao tem m´ınimo na origem, ´e simples ver que f ´e s-decid´ıvel e tem sela na origem.
Ser´a de fundamental importˆancia estudar o comportamento da derivada radial de jsΠ na origem, P
s(q) :=h∇jsΠ(q), qi; em geral, as fun¸c˜oes jsΠ e
Psn˜ao tˆem o mesmo comportamento em 0, como pode ser visto no seguinte
exemplo
Exemplo 2.2.3 Consideremos um polinˆomio
f(q1, q) := (aq1−b|q|2)2+c|q|4, com a >0, b >0, c >0, b2>8c.
e onde q:= (q2, ..., qn). Notemos que
∂f ∂q1
= 2a(aq1−b|q|2)
∂f ∂qj
=
−4abq1+ (4b2+ 4c)|q|2
qj, j= 2, ..., n
assim, a derivada radial h∇f(q), qi= ∂q∂f 1q1+
Pn
j=2 ∂q∂fjqj, escreve-se como
h∇f(q), qi= 2a2q1−
3b 2a|q|
22 −b
2−8c
2
|q|4.
´
16 CAP´ITULO 2. PRELIMINARES, O PROBLEMA E UM LEMA
A fun¸c˜aoh∇f(q), qi, foi utilizada por ˇCetaev para mostrar o seguinte resul-tado de instabilidade
Teorema 2.2.4 (N.G. ˇCetaev [1936])
Suponha que Bε ⊂Ω, para algum ε >0 e que o sistema hamiltoniano XH
satisfaz as propriedades
1. Θ ={q ∈Bε|Π(q)<0} 6=∅
2. 0∈∂Θ
3. h∇Π(q), qi<0, ∀q∈Θ
ent˜ao o equil´ıbrio(q, p) = (0,0)´e instavel.
Uma demonstra¸c˜ao deste resultado pode ser vista, por exemplo, em [LHR]. Se uma energia potencial Π satisfaz as condi¸c˜oes deste teorema diremos que Π ´e um potencial do “tipo ˇCetaev”.
O que faremos neste trabalho ser´a determinar se Π ´e um potencial do “tipo ˇCetaev”a partir de propriedades dejsΠ. Mais precisamente,
descreve-mos este problema a seguir.
2.2.1 O problema
Supondo quejsΠ ´e uma energia potencial do tipo ˇCetaev, ser´a verdade que Π tamb´em ´e uma energia potencial do tipo ˇCetaev?
Esta quest˜ao, sem outras hip´oteses, tem uma resposta negativa, mesmo quando jsΠ mostra que Π n˜ao tem m´ınimo na origem, e um exemplo
mostrando isto ser´a apresentado em algum detalhe no cap´ıtulo 4.
A fim de trabalhar no contexto das energias potenciais Π∈Js(Ω,R) que
n˜ao apresentam m´ınimo na origem, consideramosPs(q) :=h∇jsΠ(q), qie os
conjuntos semi-alg´ebricos
As:={q ∈Ω|jsΠ(q)<0}, Cs:={q ∈Ω|Ps(q)<0}
e vamos supor que a energia potencial Π∈Js(Ω,R) satisfaz:
(H1) jℓΠ(q)≥0 numa vizinhan¸ca da origem 0∈Ω, seℓ≤s−1;
(H2) jsΠ mostra que Π n˜ao tem m´ınimo na origem 0∈Ω;
2.3. LEMA FUNDAMENTAL 17
Claro que (H3) mostra que jsΠ ´e um potencial do tipo ˇCetaev.
Nosso principal resultado ´e:
Teorema.
“ Se Π satisfaz as hip´oteses (H1)−(H3), ent˜ao Π ´e um potencial de tipo
ˇ
Cetaev ”.
Mostraremos tamb´em que, enfraquecendo um pouco a hip´otese (H1) esse
resultado deixa de ser verdadeiro.
2.3
Lema fundamental
Nesta se¸c˜ao colocamos em evidˆencia a importˆancia da hip´otese (H3), o
que ser´a crucial na constru¸c˜ao feita no pr´oximo cap´ıtulo.
Seγ : [0, ρ]→Rn´e uma curva alg´ebrica tal queγ(0) = 0 eγ(t)6= 0 para todo t∈(0, ρ]; denotamos por rγ a semi-reta tangente aγ na origem. Para
detalhes t´ecnicos acerca de curvas alg´ebricas e conjuntos semi-alg´ebricos referimos a [M].
Lema 2.3.1 Suponha que Π ∈Js(Ω,R) satisfaz a hip´otese (H3) e seja γ : [0, ρ]→ Rn uma curva alg´ebrica tal que γ(0) = 0 e γ(t) ∈As se t∈(0, ρ]. Ent˜ao jsΠ|
rγ tem m´aximo local estrito na origem.
Demonstrac¸˜ao
Sejav6= 0 o versor deγ em 0+. Como jsΠ ´e um polinˆomio de graus, existe ε >0 tal que uma das seguintes possibilidades acontece:
(a) jsΠ(λv)>0, para todo λ∈(0, ε) (b) jsΠ(λv) = 0, para todo λ∈(0, ε)
(c) jsΠ(λv)<0, para todo λ∈(0, ε)
eλv,λ∈R+, ´e uma parametriza¸c˜ao derγ. Mostremos que as possibilidades (a) e (b) n˜ao ocorrem.
1. Suponha que (a) ocorre. Tome q = ε2v, ent˜ao jsΠ(q) > 0 e escolha δ >0 tal que1jsΠ(x)≥0, para todo x tal que|x−q|< δ. Seja agora Σδ(q) o disco de dimens˜ao n−1 centrado em q de raio δ, ortogonal
a v. Tomando ent˜ao o tronco de cone ∆ de v´ertice 0 e base Σδ(q),
veja que, como v ´e o versor de γ em 0+ e, para t > 0, γ(t) ∈ As,
1
Neste ponto pode-se garantirjsΠ(x)>0 emB(q, δ), preferimos a desigualdade branda
18 CAP´ITULO 2. PRELIMINARES, O PROBLEMA E UM LEMA
resulta que existe um ponto p no interior de ∆ tal que jsΠ(p) < 0. Considere a semi-reta de origem 0 que passa por pe note que, comop est´a no interior de ∆ existe exatamente um ponto w dessa semi-reta que est´a em Σδ(q). Claro que p´e um ponto do interior do segmento
0we, comojsΠ ´e um polinˆomio,jsΠ(p)<0 ejsΠ(w)≥0, resulta que existetu ∈(0,1) tal que o pontou:=tuw do segmento 0w satisfaz,
(i) jsΠ(tw)≥0, setu ≤t≤1;
(ii) existeρ >0 tal quejsΠ(tw)<0, set
u−ρ < t < tu.
Portanto u∈As\ {0} e dtdjsΠ(tw)|t=tu ≥0. Como
d dtj
sΠ(tw)
t=tu
=
∇jsΠ(tuw), w=
1 tu
Ps(u)
resulta Ps(u) ≥ 0. Isso contraria a hip´otese (H3), e mostra que (a)
n˜ao pode acontecer.
2. Suponha que (b) ocorre. Tome outra vezq= 2εve agora escolha Σ1(q)
o disco de dimens˜ao n−1 centrado em q de raio 1, ortogonal a v. Se existe uma sequˆencia de pontos (qk) ⊂Σ1(q)\ {q}, qk → q, tais que
jsΠ(qk) < 0 ent˜ao q ∈ As\ {0}, e como jsΠ(λv) = 0, se λ ∈ (0, ε),
resulta
Ps(q) =
ε 2
∇jsΠ(ε 2v), v
= ε 2
d dλj
sΠ(λv)
λ=ε
2 = 0
contrariando outra vez a hip´otese (H3). Se isso n˜ao acontece, existe
δ >0 tal quejsΠ(x)≥0, para todo x∈Σ
δ(q), aplicamos o raciocinio
do item (a) contrariando a hip´otese (H3) tamb´em neste caso. Assim,
(c) ocorre (ver Figura 2.1).
2.3. LEMA FUNDAMENTAL 19
. r
γ
A
γ Cs
s
0
ε n−1 R
Bε
Figura 2.1: A hip´otese (H3)
0
γ A 4
C4
r γ y
Figura 2.2: Sem a hip´otese (H3)
Notemos que sem a hip´otese (H3) o resultado enunciado no lema acima
´e falso, para ver isto considere, emR2, Π(x, y) = (y−x2)(y−3x2) e a curva γ(t) = (t,2t2), t≥0. ´E imediato ver que γ ´e tangente em 0+ ao semi-eixo
x≥0 e Π(γ(t)) =−t4 enquanto Π(x,0) = 3x4 (ver Figura 2.2).
Al´em disso, ´e interessante destacar que o Lema 2.3.1 apresenta apenas conclus˜oes sobre o sinal de jsΠ em semi retas tangentes a curvas em As e
n˜ao em Cs, o exemplo a seguir esclarece este ponto.
Considere emR3o polinˆomiof(x, y, z) = (x−8z2)2+z4−y6, no semi-eixo y≥0 este polinˆomio satisfazf(0, y,0) =−y6, isto ´e, este semi-eixo menos a origem est´a contido no conjuntof−1(−∞,0). Notemos que a derivada radial
F(x, y, z) =h∇f(x, y, z),(x, y, z)i, ´e um polinˆomio que pode ser escrito como
20 CAP´ITULO 2. PRELIMINARES, O PROBLEMA E UM LEMA
r γ
γ C 6
B
A 6
y
x Bε
ε
0
Figura 2.3: γ ⊂C6\A6 n˜ao satisfaz a conclus˜ao do Lema 2.3.1
notemos tamb´em que no conjunto
B:={(x, y, z)∈R3|(12−√14)z2≤x≤(12 +√14)z2, −az2≤y≤az2} onde [(4 +√14)2+ 1]16 < a <2, o polinˆomio
G(x, y, z) := 2[x−(12 +√14)z2][x−(12−√14)z2]
satisfaz G((12±√14)z2,±az2, z) = 0 e como F(x, y, z) < G(x, y, z) re-sulta que vale a inclus˜ao B ⊂ C6, onde C6 ´e a componente conexa de
F−1(−∞,0) que cont´em o semi-eixo y ≥ 0. Por outro lado, nas curvas
((12±√14)z2,±az2, z) da fronteira de B vˆe-se que
f(12±√14)z2,±az2, z=(4±√14)2+ 1−a6z8z4,
daqui, se ε = [(4−
√ 14)2
+1]18
a
3
4 temos que f((12±
√
14)z2,±az2, z) > 0 para todo 0< z < ε, portanto
(A6\ {0})∩Bε⊂B∩Bε
onde A6 ´e a componente conexa de f−1(−∞,0) que cont´em o semi-eixo
y≥0. Mostramos, de fato, a inclus˜ao
(A6\ {0})∩Bε ⊂C6∩Bε.
Mas note que, a curva γ(t) = ((12 +√14)t2, at2, t), t ≥ 0 ´e tangente em 0+ ao semi-eixo z ≥0, γ(0) = 0, e vale F(γ(t)) = −6a6t12, e seλv ´e a
Cap´ıtulo 3
Cones tangentes e
s
-resistˆ
encia
Neste cap´ıtulo ser´a construido um cone positivo Ks ⊂ Rn de v´ertice
na origem, no qual ter´a sentido apresentar nosso resultado principal de s−resistˆencia. Entendemos como cone de v´ertice na origem a um conjunto M ⊂ Rn tal que para cada q ∈ M e todo λ ∈ R tem-se λq ∈ M; M ser´a chamado cone positivo se esta propriedade vale para todo λ≥0.
Lembremos que, a menos de men¸c˜ao expl´ıcita em contr´ario, Ω ser´a uma vizinhan¸ca aberta da origem de Rn e Js(Ω,R) representa o conjunto das fun¸c˜oes de Ω em R, de classe C2 e que tem jato pontual de ordem sem 0.
Lembremos tamb´em que, a energia potencial Π ∈ Js(Ω,R) satisfaz as hip´oteses:
(H1) jℓΠ(q)≥0 numa vizinhan¸ca da origem 0∈Ω, seℓ≤s−1;
(H2) jsΠ mostra que Π n˜ao tem m´ınimo na origem 0∈Ω;
(H3) existeε >0 comBε⊂Ω, tal que (As\ {0})∩Bε⊂Cs◦∩Bε.
3.1
O cone
Z
s−1Como no cap´ıtulo anterior, se Π ∈ Js(Ω,R) ent˜ao denotemos Ps(q) =
h∇jsΠ(q), qi e porA
s e Cs os conjuntos semi-alg´ebricos
As:={q∈Ω|jsΠ(q)<0}, Cs:={q∈Ω|Ps(q)<0}.
Lembremos que se γ : [0, ρ] → Ω ´e uma curva alg´ebrica com γ(0) = 0 e γ(t)6= 0 se 0< t≤ρ, denota-se por rγ a semireta tangente a γ em 0+.
Uma consequˆencia direta do Lema 2.3.1 ´e o seguinte
22 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
Corol´ario 3.1.1 Se Π ∈ Js(Ω,R) satisfaz a hip´otese (H3) e, al´em disso, jsΠ´e o primeiro jato que mostra que Π n˜ao tem m´ınimo na origem, ent˜ao, para toda curva alg´ebrica γ : [0, ρ]→Rn tal que γ(0) = 0 eγ(t)∈As\ {0} se 0 < t ≤ρ, tem-se que Πℓ|rγ ≡ 0 para todo ℓ ≤ s−1 e Πs(q) <0 para
cadaq ∈rγ\ {0}.
Demonstrac¸˜ao
Seja uma curva alg´ebricaγ : [0, ρ]→Rn tal que γ(0) = 0 eγ(t)∈As\ {0} se 0< t≤ρ; parametrizemos a semi-retarγ={τ q0} comτ ≥0 para algum
q0∈rγ\ {0}. Do Lema 2.3.1 segue que
jsΠ(q)<0, ∀q∈(rγ\ {0})∩Bε0
para algum 0< ε0 <1. UsandojsΠ =Pℓ≤s−1Πℓ+ Πs e a homogeneidade
das fun¸c˜oes Πℓ, podemos escrever
jsΠ(τ q0) =
X
ℓ≤s−1
τℓΠℓ(q0) +τsΠs(q0).
Suponha, por absurdo, que para algum ℓ ≤ s−1, Πℓ|rγ 6= 0, tomemos
ℓ0 = min{ℓ≤s−1 : Πℓ|rγ 6= 0}, ent˜ao Πℓ0|rγ ´e uma fun¸c˜ao homogˆenea de
grauℓ0, portanto ou Πℓ0|rγ tem m´ınimo estrito em 0 ou tem m´aximo estrito
em 0. No primeiro caso Πℓ0(q0) > 0 e j
sΠ(τ q
0) = τℓ0Πℓ0(q0) +o(|q0|
s),
dondejsΠ|
rγ tem m´ınimo estrito local em 0, contrariando o Lema 2.3.1. No
segundo caso jℓ0Π mostra que Π n˜ao tem m´ınimo na origem, contrariando a hip´otese, pois ℓ0 < s.
Observa¸c˜ao 3.1.2 Considere
Zs−1 :=
s−1
\
ℓ=k
q∈Ω
Πℓ(q) = 0 \ {0}.
Observemos que, Zs−1 ⊂(js−1Π)−1({0}) e, da homogeneidade das fun¸c˜oes
Πℓ, segue queZs−1∪ {0} ´e um cone de v´ertice em0.
Observa¸c˜ao 3.1.3 O Corol´ario3.1.1, mostra que seΠ∈Js(Ω,R) e jsΠ ´e
o primeiro jato que mostra queΠ n˜ao tem m´ınimo na origem, ent˜ao existe pelo menos uma semi-retar⊂Zs−1 de origem em 0 tal que Πs(q)<0 para
3.2. CONSTRUINDO O CONE KS 23
Proposi¸c˜ao 3.1.4 Suponha que Π satisfaz as hip´oteses (H1)−(H3), seja
uma semi-reta r⊂Zs−1 de origem em0 e denotemos por ∆r `a componente
conexa de Zs−1 que cont´emr. Se Πs(q0)<0para algum q0 ∈r\ {0}, ent˜ao
Πs(q)<0 para todoq ∈∆r\ {0}.
Demonstrac¸˜ao
Da conexidade de ∆r, basta mostrar que Πs(q)6= 0 para todoq ∈∆r\ {0}.
Suponha por absurdo que, para algum q1 ∈ ∆r \ {0}, vale Πs(q1) = 0.
Notemos primeiro que na reta ℓ = {tq0|t ∈ R} tem-se Πs(tq0) = tsΠs(q0),
assim o ´unico ponto de ℓ onde Πs anula-se ´e a origem, portanto q1 ∈/ ℓ.
Tomemos ent˜ao q∗ o ponto do segmento q0q1 mais afastado de q1 tal que
Πs(q∗) = 0 e Πs(q) < 0 se q est´a no segmento q0q∗ \ {q∗}. Ent˜ao, pelas
observa¸c˜oes precedentes, q∗ 6= 0, e temos que q∗ ∈ As\ {0} e jsΠ(q∗) = 0,
contrariando (H3).
3.2
Construindo o cone
K
sSe r ⊂ Zs−1 ´e uma semi-reta de origem em 0 e q ∈ r\ {0} um ponto
fixado, podemos considerar aqui o hiperplano [r]⊥ ortogonal a r que passa
por q. Vamos construir um cone fechado Kr ⊂Rn contendo r e de v´ertice
na origem; simplesmente consideramos uma bola fechadaB ⊂[r]⊥de centro em q e raio δ >0, com B∩Zs−1 ⊂∆r, e definindoKr como
Kr :=
[
x∈B
Lx, Lx:={λx|0≤λ}.
Este cone fechado ser´a ´util no futuro para uma constru¸c˜ao mais sofisticada.
Proposi¸c˜ao 3.2.1 Suponha que Π satisfaz as hip´oteses (H1)−(H3), seja
uma semi-reta r ⊂ Zs−1 de origem em 0 tal que Πs(q) < 0 para todo q ∈
r\ {0} e considere a componente conexa ∆r de Zs−1 que cont´em r. Ent˜ao
existe um cone fechado Kr⊂Rn de v´ertice na origem tal que
1. r\ {0} ⊂(Kr)◦,
2. Πs(q)<0 para todoq ∈Kr\ {0},
24 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
K r
∆r r
0
B R
n−1
Figura 3.1: O cone Kr e o cone ∆r⊂Zs−1.
Demonstrac¸˜ao
Fixemos um pontoq0 ∈r\{0}e escolhamos um n´umero 0< δ0 <1 pequeno
o suficiente tal queB∩Zs−1⊂∆r, ondeB⊂[r]⊥´e a bola fechada de centro
emq0 e raioδ0>0 de [r]⊥; como feito acima, o conjunto Kr dado por
Kr:=
[
x∈B
Lx, Lx:={λx|0≤λ}
´e de fato um cone fechado de v´ertice em 0 e como vale Lq0 = r, segue ent˜ao o item 1. Como Πs(q0) < 0, da continuidade da fun¸c˜ao Πs segue
que eventualmente diminuindoδ0>0, se necess´ario, tem-se Πs(x)<0 para
todox ∈B, e sendo Πs uma fun¸c˜ao homogˆenea tem-se que Πs(q)<0 para
todo q ∈ Lx \ {0} e todo x ∈ B, consequentemente Πs(q) < 0 para todo
q∈Kr\{0}, isto mostra o item 2. Para obter o item 3, note que, comoKre
Zs−1 s˜ao cones de v´ertice na origem, ent˜ao, sey∈Kr∩Zs−1,ty∈Kr∩Zs−1,
para todot >0, assim tomandot⋆ = |q0|
|y|, tem-se t⋆y∈B∩Zs−1, portanto
Kr∩Zs−1 =
[
x∈B
(Lx∩Zs−1) =
[
x∈B∩Zs−1 Lx.
ComoB∩Zs−1⊂∆r, resulta da conexidade de ∆r quey∈∆r, concluindo
a demonstra¸c˜ao (ver Figura 3.1).
Observa¸c˜ao 3.2.2 A Proposi¸c˜ao 3.2.1 diz que, para cada semi-reta r ⊂ Zs−1 de origem em 0 tal que Πs(q) < 0 para todo q ∈ r\ {0}, o cone Kr
3.2. CONSTRUINDO O CONE KS 25
Corol´ario 3.2.3 Suponha que Π satisfaz as hip´oteses (H1)−(H3), e
con-sidere uma semi-reta r⊂Zs−1 de origem em 0 tal que Πs(q)<0 para todo
q ∈r\ {0}, e seja ∆r a componente conexa de Zs−1 que cont´em r. Ent˜ao
existe um cone Ks⊂Rn de v´ertice na origem tal que
(a) ∆r\ {0} ⊂(Ks)◦.
(b) Seq∈∂Ks\{0}existeℓ∈ {k,· · · , s−1}tal queΠℓ(q)>0eΠj(q) = 0
para j < ℓ.
(c) Πs(q)<0 para todoq ∈ Ks\ {0}.
Demonstrac¸˜ao
Da Proposi¸c˜ao 3.1.4, temos que para cada semi-reta ˜r⊂∆r de origem em 0
tem-se Πs(q)<0 para todoq∈r˜\{0}e da Proposi¸c˜ao 3.2.1, existe um cone
fechadoK˜r⊂Rnde v´ertice na origem com as propriedades l´a descritas, isto
´e:
1. r\ {0} ⊂(Kr)◦,
2. Πs(q)<0 para todoq ∈Kr\ {0},
3. Kr∩Zs−1 ⊂∆r.
Definamos o conjunto Ks como sendo
Ks:=
[
˜
r⊂∆r
Kr˜.
Seja q ∈ Ks\ {0} arbitr´ario, ent˜ao q ∈ Kr˜\ {0} para alguma semi-reta
˜
r ⊂∆r, tal que ˜r\ {0} ⊂Kr◦˜; daqui segue que, Πs(q)<0 e al´em disto, para
cadaλ≥0 valeλq∈Kr˜; isto mostra o item (c) e queKs´e de fato um cone
de v´ertice em 0.
Notemos que para todo ˜r ⊂ ∆r, o conjunto Sr˜⊂∆r(K˜r)
◦ ´e aberto e
S
˜
r⊂∆r(K˜r)
◦ ⊂ Ks, portanto S
˜
r⊂∆r(Kr˜)
◦ ⊂ (Ks)◦, e daqui obtemos as
seguintes inclus˜oes (∆r\ {0}) =
[
˜
r⊂∆r
(˜r\ {0})⊂ [
˜
r⊂∆r
(Kr˜)◦ ⊂(Ks)◦,
o que mostra o item (a).
Agora note que Ks∩Zs−1 =S˜r⊂∆rK˜r∩Zs−1 e, pela Proposi¸c˜ao 3.2.1
Kr˜∩Zs−1 ⊂∆r\ {0}, assim
26 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
r ∆r
0 R
n−1
F i
K s
Figura 3.2: O cone Ks e algum coneFi⊂∂Ks\ {0} (k≤i≤s−1).
ComoZs−1 =Zs−1∪ {0}, ´e claro que se q ∈Zs−1 e q6= 0, ent˜ao q ∈Zs−1,
o que mostra que∂Ks∩Zs−1∩Bδ =∅, para todoδ >0.
Portanto, seq ∈∂Ks e q= 0, ent˜ao6 q∈(Zs−1)c, e como
(Zs−1)c =
s−1
[
ℓ=k
q ∈Ω
Πℓ(q)6= 0
vem que, para todoq∈∂Ks\{0}, existeℓ1 ∈ {k, ..., s−1}tal que Πℓ1(q)6= 0. Podemos considerar o menor destes n´umerosℓ1(q) := min{ℓ1∈ {k,· · · , s−
1}|Πℓ1(q)6= 0}, e definir subconjuntosFℓ⊂∂Ks\ {0} da forma
Fℓ:=
n
q ∈∂Ks\ {0}
ℓ1(q) =ℓ o
, ℓ∈ {k, ..., s−1}.
Note que (ver Figura 3.2)
s−1
[
ℓ=k
Fℓ = (∂Ks\ {0}).
Proposi¸c˜ao 3.2.4 Suponha queΠ satisfaz as hip´oteses(H1)−(H3). Ent˜ao
existem ε > 0 e m > 0 tal que o cone Ks ⊂ Rn dado no Corol´ario 3.2.3
satisfaz:
(i) js−1Π(q)≥ m
3.2. CONSTRUINDO O CONE KS 27
(ii) Ps−1(q)≥(s−1)m2|q|s−1, ∀q ∈(∂Ks\ {0})∩Bε.
Demonstrac¸˜ao
Tem-se que ∂Ks ´e um cone de v´ertice na origem. Seja S a esfera de centro
na origem e raio 1; o conjunto∂Ks∩S ´e compacto.
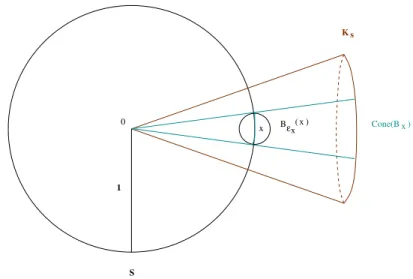
Se x ∈ ∂Ks∩S ent˜ao x ∈ Fℓ para algum ℓ ∈ {k, ..., s−1} e portanto
Πℓ(x)>0. Existeεx >0 tal que Πℓ(q)>0 para todoq∈(∂Ks∩S)∩Bεx(x);
podemos definir Bx= (∂Ks∩S)∩Bεx(x) e considerar
mx= min q∈Bx{
Πℓ(q)}>0
Se Cone(Bx) ´e o cone de v´ertice na origem gerado porBx, eq∈Cone(Bx),
q 6= 0, ent˜ao (ver Figura 3.3)
jℓΠ(q) =jℓ−1Π(q) + Πℓ(q)≥Πℓ(q) =|q|ℓΠℓ
q
|q|
≥mx|q|ℓ.
Para s > ℓ+ 1, escrevendo js−1Π =jℓΠ +jℓs−1Π, vem jℓs−1Π = Πℓ+1+...+
Πs−1, e portanto jℓ(jℓs−1Π) = 0. Seq ∈Cone(Bx),q 6= 0, ent˜ao
js−1Π(q) =jℓΠ(q) +jℓs−1Π(q)≥mx|q|ℓ+jℓs−1Π(q),
e como jℓ(jsℓ−1Π) = 0 existeρx>0 tal que se 0<|q|< ρx ent˜ao
|jℓs−1Π(q)| ≤ mx
2 |q|
ℓ.
Assim, se 0<|q|< ρx e q ∈Cone(Bx), tem-se
js−1Π(q)≥ mx
2 |q|
ℓ.
A fam´ıliaC={Bεx(x)|x∈∂Ks∩S}´e uma cobertura por abertos de∂Ks∩S.
Seja{Bεx1(x1), Bεx2(x2), ..., Bεxr(xr)}uma subcobertura finita deCtal que
∂Ks∩S ⊂Bεx1(x1)∪Bεx2(x2)∪...∪Bεxr(xr).
Como Bxi = (∂Ks∩S)∩Bεxi(xi),i∈ {1, ..., r}, segue que
∂Ks∩S ⊂Bx1∪Bx2 ∪...∪Bxr.
Notemos que xi ∈∂Ks∩S,i∈ {1, ..., r}, ent˜ao pelo procedimento anterior,
para cada i ∈ {1, ..., r} existem mxi >0, ρxi > 0 e ℓi ∈ {k, ..., s−1} tais
que, se 0<|q|< ρxi e q∈Cone(Bxi) tem-se
js−1Π(q)≥ mxi
2 |q|
28 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
Consideremos agora os n´umeros
m:= min{mx1, ..., mxr}>0, ρ:= min{ρx1, ..., ρxr}>0,
e seja q ∈∂Ks, q 6= 0; ´e claro que xq = |qq| ∈ S e como ∂Ks ´e um cone de
v´ertice na origemxq= |qq| ∈∂Ks, logoxq∈∂Ks∩S, portantoxq ∈Bεxiq(xiq)
para algum iq ∈ {1, ..., r}, consequentemente tem-se que xq ∈ Bxiq; e al´em
disso observemos que q = |q|xq ∈ Cone(Bxiq). Assim, se 0 < |q| < ρ
obtemos
js−1Π(q)≥ mxiq
2 |q|
ℓiq ≥ m
2|q|
ℓiq.
Portanto, se 0< ε′ <min{ρ,1}tem-se
js−1Π(q)≥ m
2|q|
ℓiq ≥ m
2|q|
s−1, ∀q∈(∂K
s\ {0})∩Bε′,
o qual mostra o item (i) emBε′.
Para ver o item (ii) note que, como js−1Π(q) =Ps−2
ℓ=kΠℓ(q) + Πs−1(q),
podemos escrever a seguinte estimativa
Πs−1(q)≥
m 2|q|
s−1−
s−2
X
ℓ=k
Πℓ(q), ∀q∈(∂Ks\ {0})∩Bε′.
Pela hip´otese (H1) vale jℓΠ(q) ≥ 0 se k ≤ ℓ ≤ s−1 e q ∈ Bε′; e como
jℓΠ(q) =jℓ−1Π(q) + Πℓ(q) =Piℓ=−k1Πi(q) + Πℓ(q), podemos escrever
Πℓ(q)≥ − ℓ−1
X
i=k
Πi(q), ∀q ∈Bε′, k+ 1≤ℓ≤s−1
Dado q ∈ (∂Ks\ {0})∩Bε′ temos que tq ∈ ∂Ks \ {0} para todo t > 0.
Como vale ℓ+1ℓ < ℓℓ+1+2 para cada ℓ∈N, temos que k
k+1 = mink≤ℓ≤s−1{ℓ+1ℓ }.
Consideremos 0< t < k+1k , as estimativas dadas acima e a identidade
Ps−1(q) =h∇js−1Π(q), qi=
s−1
X
ℓ=k
3.2. CONSTRUINDO O CONE KS 29
para mostrar as seguintes desigualdades
Ps−1(tq) =
s−2
X
ℓ=k
ℓtℓΠℓ(q) + (s−1)ts−1Πs−1(q)
≥
s−2
X
ℓ=k
ℓtℓΠℓ(q) + (s−1)ts−1
m
2|q|
s−1−
s−2
X
ℓ=k
Πℓ(q)
=
s−2
X
ℓ=k
(ℓtℓ−(s−1)ts−1)Πℓ(q) + (s−1)ts−1
m 2|q|
s−1
=
s−3
X
ℓ=k
(ℓtℓ−(s−1)ts−1)Πℓ(q) + ((s−2)ts−2−(s−1)ts−1)Πs−2(q)
+(s−1)ts−1m 2|q|
s−1
≥
s−3
X
ℓ=k
(ℓtℓ−(s−1)ts−1)Πℓ(q)−((s−2)ts−2−(s−1)ts−1) s−3
X
ℓ=k
Πℓ(q)
+(s−1)ts−1m 2|q|
s−1
=
s−3
X
ℓ=k
(ℓtℓ−(s−2)ts−2)Πℓ(q) + (s−1)ts−1
m 2|q|
s−1
.. .
= (ktk−(k+ 1)tk+1)Πk(q) + (s−1)ts−1
m 2|q|
s−1
= (k−(k+ 1)t)Πk(tq) + (s−1)
m 2|tq|
s−1.
Daqui, como Πk(tq) =jkΠ(tq)≥0 e 0< t < k+1k resulta
Ps−1(tq)≥(s−1)
m 2|tq|
s−1, ∀q ∈(∂K
s\ {0})∩Bε′, 0< t <
k k+ 1 Portanto, se ε= k+1k ε′ obtemos o afirmado
Ps−1(q)≥(s−1)
m 2|q|
s−1, ∀q ∈(∂K
s\ {0})∩Bε.
30 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
K s
Cone(B x )
x Bεx( x )
1 0
S
Figura 3.3: Um pontox∈∂Ks∩S e o coneCone(Bx).
Corol´ario 3.2.5 Suponha que Π satisfaz as hip´oteses (H1)−(H3). Ent˜ao
existeε >0 tal que o coneKs⊂Rn dado no Corol´ario3.2.3, satisfaz:
(i)′ jsΠ(q)>0 para cadaq ∈(∂K
s\ {0})∩Bε,
(ii)′ Ps(q)>0 para cada q∈(∂Ks\ {0})∩Bε.
Demonstrac¸˜ao
Do item (c) dado no Corol´ario 3.2.3, tem-se que Πs(q) < 0 para cada q ∈
Ks\ {0}; logo vale Πs(|qq|) =|q|−sΠs(q)<0 para cada q∈ Ks\ {0}, e como
a esfera∂B1 de raio 1 ´e compacta, existem constantes M1>0,M2>0 tais
que
−M1≤Πs
q
|q|
≤ −M2, ∀q∈(Ks\ {0}).
Da Proposi¸c˜ao 3.2.4, item (i), existem uma constante uniforme m > 0 e o n´umero 0< ε′ <1 tais que
js−1Π(q)≥ m
2|q|
s−1, ∀q∈(∂K
s\ {0})∩Bε′.
Assim, para cadaq ∈(∂Ks\ {0})∩Bε′ resulta
jsΠ(q) =js−1Π(q) + Πs(q)≥
m 2|q|
s−1−M
1|q|s =|q|s−1
m
2 −M1|q|
e considerandoε1 = min{ε′,2mM1}obtemos o afirmado no item (i)
′, emBε
3.2. CONSTRUINDO O CONE KS 31
Analogamente, da Proposi¸c˜ao 3.2.4, item (ii), existe 0< ε′′ <1 tal que
Ps−1(q)≥(s−1)
m 2|q|
s−1, ∀q∈(∂K
s\ {0})∩Bε′′,
logo, para cada q∈(∂Ks\ {0})∩Bε′′ obtemos
Ps(q) = Ps−1(q) +sΠs(q)≥(s−1)
m 2|q|
s−1−sM 1|q|s
= |q|s−1h(s−1)m
2 −sM1|q|
i
,
e considerando ε2 = min{ε′′,(s2−sM1)1m} obtemos o afirmado no item (ii)
′, em
Bε2. Agora tomeε= min{ε1, ε2}.
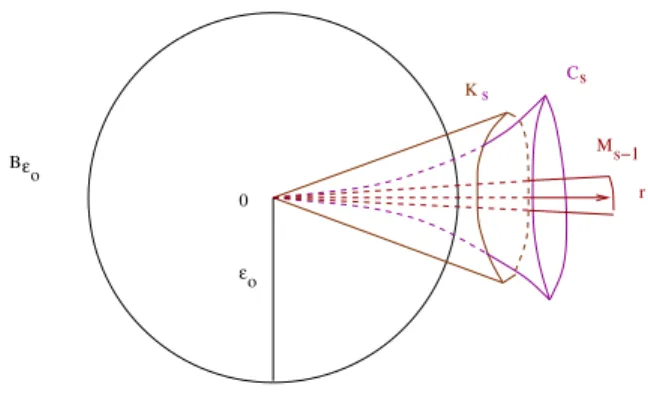
Observa¸c˜ao 3.2.6 Do Corol´ario 3.2.3, temos que, se o conjunto Ms−1 :=r ⊂Zs−1
Πs|(r\{0})<0 6=∅
for conexo, ent˜ao Ms−1 = ∆r para alguma semi-reta r ⊂ Ms−1 de origem
em 0. O conjunto Ms−1 ´e de fato um cone positivo de v´ertice na origem e
ser´a chamado de cone tangente ao conjunto As, pois, para qualquer curva
alg´ebrica γ: [0, ρ]−→Ωcomγ(0) = 0eγ(t)∈As\ {0}se0< t≤ρ, tem-se
que rγ ⊂Ms−1.
Admitindo que o cone tangente Ms−1 ao conjunto As ´e constituido por
uma ´unica componente conexa, temos a seguinte consequˆencia
Corol´ario 3.2.7 Suponha que Π satisfaz as hip´oteses (H1)−(H3), e seja
r uma semi-reta de origem0 contida em Ms−1. SeA˜s eC˜s s˜ao,
respectiva-mente as componentes conexas de As eCs que cont´em r\ {0} eKs ´e o cone
dado pelo Corol´ario3.2.3, ent˜ao existe 0< ε0<1 tal que
( ˜Cs\ {0})∩Bε0 ⊂(Ks)◦∩Bε0. Demonstrac¸˜ao
Do Lema 2.3.1, o cone tangente a ˜As\ {0}´e
Ms−1 ={r⊂Zs−1| Πs|(r\{0})<0}
e satisfaz a inclus˜aoMs−1 ⊂A˜spoisjsΠ|(r\{0}) = Πs|(r\{0})para cada
32 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
do item (b) segue que a fronteira ∂Ks\ {0} n˜ao ´e tangente aAs\ {0} pois
(∂Ks\ {0})∩Zs−1∩Bε=∅ para todoε >0.
Al´em disto, do item (i)′ dado no Corol´ario 3.2.5, existe 0 < ε1 <1 tal
que jsΠ(q) > 0 para cada q ∈ (∂K
s\ {0})∩Bε1, assim, diminuindo ε1 se necess´ario, obtemos
( ˜As\ {0})∩Bε1 ⊂(Ks)◦∩Bε1
e, como do item (c) dado no Corol´ario 3.2.3, vale Πs(q) < 0 para cada
q∈ Ks\ {0}, tem-se
Πs(q)<0, ∀q ∈(∂A˜s\ {0})∩Bε1.
Pela hip´otese (H3) vale a inclus˜ao ( ˜As \ {0}) ∩Bε1 ⊂ C˜s ∩Bε1, conse-quentemente vale Ps(q) < 0, para todo q ∈ (∂A˜s \ {0}) ∩Bε1, e como Ps(q) =h∇jsΠ(q), qi satisfaz a igualdade (dada na pr´oxima se¸c˜ao, no Lema
3.3.1)
Ps(q) = (s−1)jsΠ(q)− s−2
X
ℓ=k
jℓΠ(q) + Πs(q)
utilizando a hip´otese (H1) obtemos daqui que
Ps(q)≤Πs(q), ∀q∈(∂A˜s\ {0})∩Bε1.
Lembremos que comoKs ´e um cone positivo de v´ertice na origem, fechado,
existem constantesM1>0 eM2 >0 tais que
−M1≤Πs
q
|q|
≤ −M2, ∀q∈(Ks\ {0}).
Seja agora uma fun¸c˜aoo(|q|s), esta fun¸c˜ao satisfaz lim
q→0 o(|q|
s)
|q|s = 0, isto ´e,
paraM2>0 existe 0<ε˜1 < ε1 tal que
o(|q|s)
|q|s
<
M2
2 , ∀q∈Bε˜1. Daqui, seq∈(Ks\ {0})∩Bε˜1 tem-se
Πs(q) +o(|q|s) =|q|s
h
Πs
q
|q|
+o(|q|
s)
|q|s
i
3.2. CONSTRUINDO O CONE KS 33
Cs Ks
r M
ε Bε
0 o
o
s−1
Figura 3.4: O conjunto Cs e o cone Ks.
consequentemente, como para cada q ∈(∂A˜s\ {0})∩B˜ε1 existe uma semi-reta contida em (Ks)◦∩B˜ε1 passando pela origem e porq, vale que
Πs(q) +o(|q|s)≤ −
M2
2 |q|
s,
∀q ∈(∂A˜s\ {0})∩Bε˜1.
Assim, usando a desigualdade
Ps(q)≤Πs(q), ∀q∈(∂A˜s\ {0})∩Bε˜1 resulta que
Ps(q) +o(|q|s)≤ −
M2
2 |q|
s,
∀q∈(∂A˜s\ {0})∩Bε˜1.
Al´em disto, do item (ii)′ dado no Corol´ario 3.2.5, existe 0 < ε2 < 1 tal
que Ps(q) > 0 para cada q ∈ (∂Ks\ {0})∩Bε2, assim, se considerarmos ε0 = min{ε2,ε˜1}, obtemos (ver Figura 3.4)
( ˜Cs\ {0})∩Bε0 ⊂(Ks)◦∩Bε0.
Observa¸c˜ao 3.2.8 A desigualdade
Ps(q) +o(|q|s)≤ −
M2
2 |q|
s, ∀q∈(∂A˜
s\ {0})∩Bε˜1
vista no Corol´ario 3.2.7 mostra uma propriedade do polinˆomio Ps no
34 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
Esta propriedade refere-se `a resistˆencia do sinal de um polinˆomio num con-junto. Neste caso tem-se claramente que o sinal dePs(q)+o(|q|s)´e o mesmo
que o dePs(q) em(∂A˜s\ {0})∩B˜ε1, isto ´e, o sinal de Ps(q) “resiste”a per-turba¸c˜oes de ordemo(|q|s) no conjunto(∂A˜s\{0})∩Bε˜
1 em uma vizinhan¸ca da origem.
Observa¸c˜ao 3.2.9 Se Ms−1 ´e constituido por mais de uma componente
conexa, aplicamos a cada componente o corol´ario 3.2.7.
3.3
s
-resistˆ
encia de
P
sCome¸camos esta se¸c˜ao dando a seguinte estimativa para Ps
Lema 3.3.1 Se Π ∈Js(Ω,R), ent˜ao jsΠ(q) = Ps
ℓ=kΠℓ(q) e sua derivada
radial Ps(q) :=h∇jsΠ(q), qi satisfazem a seguinte igualdade:
Ps(q) = (s−1)jsΠ(q)− s−2
X
ℓ=k
jℓΠ(q) + Πs(q).
Demonstrac¸˜ao
Como Πℓ ´e uma fun¸c˜ao homogˆenea para todo ℓ ∈ {k, ..., s}, obtemos do
teorema de Euler quePs(q) =Psℓ=kℓΠℓ(q), e a igualdade segue diretamente.
Admitindo que os conjuntosAse Cs, assim como o coneMs−1 tangente
ao conjuntoAs, s˜ao todos constituidos por uma ´unica componente conexa,
o seguinte resultado de crucial importˆancia ´e obtido:
Proposi¸c˜ao 3.3.2 Suponha queΠ satisfaz as hip´oteses(H1)−(H3). Ent˜ao
existem0< ε <1e um conjunto semi-alg´ebricoWs⊂Bε tais que 0∈∂Ws,
e:
1. (As\ {0})∩Bε⊂Ws◦⊂Ws\ {0} ⊂(Cs)◦∩Bε.
2. Πs(q)<0para todoq∈Ws\{0}e, ademais, existem constantesα >0
e β >0 tais que:
(a) Se q∈∂Ws\ {0}, ent˜aojsΠ(q)≥ −αΠs(q);
3.3. S-RESIST ˆENCIA DE PS 35
Demonstrac¸˜ao
Consideremos a seguinte fam´ılia a um parˆametro de conjuntos semi-alg´ebricos
Wλ
s :={q∈Ω|Q(q, λ)<0}, ondeQ(q, λ)∈R[q, λ] s˜ao polinˆomios definidos
como
Q(q, λ) := (s−1)jsΠ(q) +λh−
s−2
X
ℓ=k
jℓΠ(q) + Πs(q)
i
.
Observemos que estes polinˆomios satisfazem o seguinte:
(i) Q(q,0) = (s−1)jsΠ(q) para todoq∈Ω, o qual mostra queW0
s =As;
(ii) Q(q,1) =Ps(q) para todo q ∈Ω, mostrando que Ws1 =Cs;
(iii) ∂Q∂λ(q, λ) = −Ps−2
ℓ=kjℓΠ(q) + Πs(q) para todo q ∈ Ω, daqui que,
uti-lizando a hip´otese (H1), obtemos
∂Q
∂λ(q, λ)<Πs(q)<0, ∀q ∈ Ks\ {0}, ∀λ∈[0,1],
ondeKs ´e o cone construido no Corol´ario 3.2.7 (e que tem a estrutura
dada no Corol´ario 3.2.3).
Consideremos 0 < ε0 < 1 dado no Corol´ario 3.2.7; do item (iii), sendo as
fun¸c˜oes Q(q,·) decrescentes, para todo q ∈ (Ks\ {0})∩Bε0 temos que, a fam´ılia Wλ
s ´e crescente emλ, isto ´e; se 0< λ1 < λ2 <1 valem as seguintes
inclus˜oes
(As\ {0})∩Bε0 ⊂ W
λ1
s ∩Bε0 ⊂ W
λ2
s ∩Bε0 ⊂Cs∩Bε0
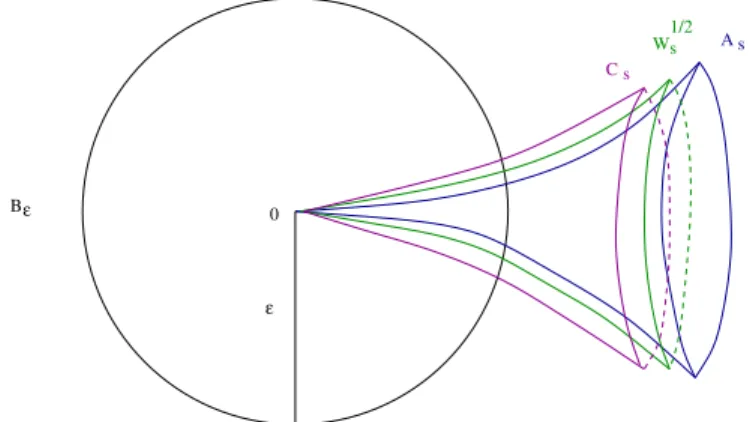
Para algum n´umero 0< ε < ε0<1, consideremos o conjunto semi-alg´ebrico
Ws:=Ws1/2∩Bε, ´e claro que 0∈∂Ws e que Ws ⊂Bε satisfaz o item 1. ´E
claro tamb´em que, da inclus˜ao
Ws\ {0} ⊂Cs∩Bε⊂(Ks)◦∩Bε
e do Corol´ario 3.2.3, tem-se que Πs(q)<0 para todoq∈Ws\{0}. Daqui, se
q ∈∂Ws\{0}, ent˜aoQ(q,1/2) = 0, de onde obtemos a seguinte desigualdade
(s−1)jsΠ(q) =−(1/2)h−
s−2
X
ℓ=k
jℓΠ(q) + Πs(q)
i
≥ −(1/2)Πs(q)
36 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
C s
Ws A s
0
ε Bε
1/2
Figura 3.5: O conjuntoWs e as-resitˆencia.
Por outro lado, seq∈Ws\{0}, ent˜aoQ(q,1/2)≤0, de onde conseguimos
a segunda desigualdade
Ps(q) = Q(q,1) =Q(q,1/2) +Q(q,1)−Q(q,1/2)
≤ (1/2)h−
s−2
X
ℓ=k
jℓΠ(q) + Πs(q)
i
≤ (1/2)Πs(q)
mostrando o item 2-(b) comβ = 12 (ver Figura 3.5).
Consideremos a seguinte
Defini¸c˜ao 3.3.3 Seja U ⊂ Ω um conjunto aberto com 0 ∈ ∂U e f um polinˆomio de grau menor ou igual a s tal que f(0) = 0 e f(q) < 0 para cadaq ∈U. Dizemos que f ´e s-resistente em U \ {0}, se para toda fun¸c˜ao h∈Js(Ω,R) com jsh≡0, existe ε=ε(h)>0 tal quef(q) +h(q)<0 para cadaq ∈(U \ {0})∩Bε.
Podemos agora, apresentar nosso resultado principal em termos de s-resistˆencia.
Teorema 3.3.4 Se Π satisfaz as hip´oteses (H1)−(H3), e se Ws ´e o
con-junto dado na Proposi¸c˜ao3.3.2, ent˜ao
3.3. S-RESIST ˆENCIA DE PS 37
(ii) Existe 0< ε2 <1 tal que, Ps ´e s-resistente em(Ws\ {0})∩Bε2.
Demonstrac¸˜ao
Consideremos 0< ε0<1 obtido na Proposi¸c˜ao 3.3.2, tal que
Πs(q)<0, ∀q ∈Ws\ {0} ⊂Cs∩Bε0 ⊂(Ks)◦∩Bε0.
Como em qualquer curva alg´ebricaγ : [0,1)→Wscomγ(0) = 0,γ(t)6= 0 se
t >0, tem-se que 0 ´e ponto de m´aximo de Πs|γ, existe 0< ε1=ε1(ε0)< ε0
tal que
Πs(q)≤ −ε0|q|s, ∀q∈Ws\ {0} ∩Bε1.
Na vizinhan¸ca Bε0, a fun¸c˜ao Π pode ser escrita, por hip´otese, da seguinte forma
Π(q) =jsΠ(q) +o(|q|s), q ∈Bε0,
ondeo(|q|s) ´e uma fun¸c˜ao cont´ınua satisfazendo lim
q→0 o(|q|
s)
|q|s = 0, portanto
|o(|q|s)|< αε0 2 |q|
s, ∀q∈B
ε1\ {0}.
Assim, do item 2-(a) dado na Proposi¸c˜ao 3.3.2, podemos obter, para todo q ∈(∂Ws\ {0})∩Bε1 a seguinte desigualdade
Π(q) =jsΠ(q) +o(|q|s)≥ −αΠs(q) +o(|q|s)> αε0
2 |q|
s,
o que mostra o item (i), para ε1 ≤ αε20.
Considere agora 0< ε1<1, obtido na Proposi¸c˜ao 3.3.2. Sabemos que
Πs(q)<0, ∀q∈Ws\ {0} ⊂Cs∩Bε1 ⊂(Ks)◦∩Bε1
e, como na prova do item anterior, existe 0< ε2 =ε2(ε1)< ε1 tal que
Πs(q)≤ −ε1|q|s, ∀q∈Ws\ {0} ∩Bε2.
Seja agora h ∈Js(Ω,R) uma fun¸c˜ao definida emBε1 ⊂Ω, tal quejsh≡0; por defini¸c˜ao h(q) =o(|q|s),q ∈B
ε1, portanto,
|h(q)|< βε1 2 |q|
s, ∀q ∈B
38 CAP´ITULO 3. CONES TANGENTES E S-RESIST ˆENCIA
Assim, do item 2-(b) dado na Proposi¸c˜ao 3.3.2, podemos obter, para todo q∈(Ws\ {0})∩Bε2 a seguinte desigualdade
Ps(q) +h(q)≤βΠs(q) +h(q)≤ −
βε1
2 |q|
s,
mostrando o item (ii) para ε2 ≤ βε21, isto ´e, mostra-se a s-resistˆencia de
Ps(q) :=h∇jsΠ(q), qi no conjunto (Ws\ {0})∩Bε2.
Observa¸c˜ao 3.3.5 Considere a componente conexa Θ do conjunto Bε2 ∩ Π−1((−∞,0))que cont´em o cone tangente (Ms−1\ {0})∩Bε2. Obtemos da Proposi¸c˜ao 3.3.2 que
Θ∩(∂Ws\ {0})∩Bε2 =∅
e, como(Ms−1\{0})∩Bε2 ⊂Θ∩Ws∩Bε2 6=∅, da conexidade deΘ, obtemos a inclus˜ao
Θ⊂Ws∩Bε2 ⊂(Ws\ {0})∩Bε2. Portanto, Ps ´e s-resistente emΘ.
Corol´ario 3.3.6 Suponha que Π = jsΠ +R satisfaz as hip´oteses (H1)−
(H3), e que exista a fun¸c˜ao ∇R(q) =o(|q|s−1). Se Ws ´e um conjunto dado
na Proposi¸c˜ao 3.3.2, ent˜ao existe 0 < ε3 < 1, tal que h∇Π(q), qi <0 para
todoq ∈(Ws\ {0})∩Bε3.
Demonstrac¸˜ao
Considerando a fun¸c˜aoh(q) :=h∇R(q), qi, temos
h∇Π(q), qi=Ps(q) +h(q)
e o resultado segue das-resistˆencia da fun¸c˜ao Ps dada no Teorema 3.3.4.
Cap´ıtulo 4
Aplica¸
c˜
oes da
s
-resistˆ
encia
de
P
s
Neste cap´ıtulo usaremos nosso resultado sobre s-resistˆencia do cap´ıtulo anterior para obter uma resposta positiva `a conjectura de Liapunov apre-sentada no Cap´ıtulo 1 para energias potenciais Π∈Js(Ω,R) que satisfazem as hip´oteses (H1)−(H3). Variantes das hip´oteses (H1)−(H3) ser˜ao
apre-sentadas e veremos em que medida aconjectura de Liapunov ´e ainda v´alida.
4.1
Instabilidade do equil´ıbrio segundo Liapunov
Estudemos aqui a estabilidade segundo Liapunov do equil´ıbrio (q0, p0) =(0,0)∈Rn×Rn, com n≥2 graus de liberdade, cuja dinˆamica ´e governada pelo sistema hamiltoniano
XH(q, p)
˙
q = ∂H∂p(q, p)
˙
p=−∂H ∂q(q, p)
com hamiltoniana H(q, p) = T(q, p) + Π(q), (q, p) ∈ Ω×Rn onde Ω⊂ Rn ´e uma vizinhan¸ca aberta da origem. Suporemos que a energia cin´etica ´e da forma T(q, p) := 12hp, B(q)pi, sendo B(q) uma matriz sim´etrica definida positiva, de clase C2(Ω,Rn2).
4.1.1 Hip´oteses (H1)−(H3)
No que segue, dizer que o sistema hamiltonianoXH satisfaz as hip´oteses
(H1)−(H3) ser´a equivalente a dizer que a energia potencial Π ∈Js(Ω,R)
40 CAP´ITULO 4. APLICAC¸ ˜OES DAS-RESIST ˆENCIA DE PS
satisfaz as hip´oteses (H1)−(H3). Admitiremos tamb´em que, se Π(q) =
jsΠ(q) +R(q), ent˜ao ∇R(q) ´e de ordem o(|q|s−1) em uma vizinhan¸ca da origem.
Teorema 4.1.1 Se o sistema hamiltoniano XH(q, p) satisfaz as hip´oteses
(H1)−(H3), ent˜aoΠ ´e uma energia potencial do tipo ˇCetaev e, portanto, o
equil´ıbrio(q, p) = (0,0) deste sistema ´e inst´avel segundo Liapunov.
Demonstrac¸˜ao
Sejaε >0, o n´umero dado no item (ii) do Teorema 3.3.4, tal que Bε⊂Ω.
Temos deste resultado, a existˆencia do conjuntoWs:=Ws1/2∩Bε6=∅com
0 ∈ ∂Ws tal que Ps(q) := h∇jsΠ(q), qi ´e s-resistente em (Ws\ {0})∩Bε;
al´em disso, na prova do Teorema 3.3.4 foi mostrado que se Θ ´e a componente conexa de Π−1((−∞,0))∩Bε que cont´em o cone tangente Ms−1∩Bε, vale
a inclus˜ao
Θ⊂Ws∩Π−1((−∞,0))∩Bε⊂(Ws\ {0})∩Bε,
diminuindoε se necess´ario. Portanto, do Corol´ario 3.3.6, resulta
h∇Π(q), qi<0, ∀q∈Θ.
Agora vai-se apresentar, nas se¸c˜oes 4.1.2 e 4.1.3, casos particulares do teorema 4.1.1. De um ponto de vista formal n˜ao haveria necessidade de fazer a demonstra¸c˜ao da instabilidade da origem nestes casos, visto serem casos particulares do nosso teorema principal, mas optamos por apresentar demonstra¸c˜oes expl´ıcitas para cada caso pois, al´em de serem mais simples do que a do Teorema 4.1.1, ilustram t´ecnicas e procedimentos usuais nesta ´
area, podendo eventualmente vir a ser usadas em outras situa¸c˜oes no futuro.
4.1.2 Hip´oteses (H1
1)−(H3)
Aqui substituimos nossa hip´otese (H1) pela seguinte hip´otese
(H1
1) Πℓ≥0 numa vizinhan¸ca da origem 0∈Ω, seℓ≤s−1.
Corol´ario 4.1.2 Se o sistema hamiltoniano XH(q, p) satisfaz as hip´oteses
(H11)−(H3), ent˜ao o equil´ıbrio(q, p) = (0,0)deste sistema ´e inst´avel segundo
4.1. INSTABILIDADE DO EQUIL´IBRIO SEGUNDO LIAPUNOV 41
Demonstrac¸˜ao ´
E claro que a hip´otese (H11) implica na hip´otese (H1), ent˜ao com as hip´oteses
(H1
1)−(H3), podemos obter tamb´em um n´umero ε > 0 e um conjunto
Ws := Ws1/2∩Bε de maneira similar ao feito na Proposi¸c˜ao 3.3.2. Neste
caso particular o conjuntoWs1/2´e obtido como um elemento da fam´ılia a um
parˆametro Wλ
s ={q ∈Ω|Q(q, λ)<0}de conjuntos semi-alg´ebricos, onde
Q(q, λ) := (s−1)jsΠ(q) +λh
s−2
X
ℓ=k
(ℓ−(s−1))Πℓ(q) + Πs(q)
i
, λ∈[0,1].
Paraε >0 pequeno suficiente, o conjuntoWs :=Ws1/2∩Bε, de fato, satisfaz
a Proposi¸c˜ao 3.3.2 com constantes α= 2(s1−1) eβ = 12.
4.1.3 Hip´oteses (H2
1)−(H3)
Aqui substituimos nossa hip´otese (H1) pela seguinte hip´otese
(H12) Existeν ∈ {k, ..., s−1} tal que numa vizinhan¸ca da origem Πr ≥0 e
Πℓ≤0, se k≤r ≤ν eν+ 1≤ℓ≤s−1 e, al´em dissojs−1Π≥0.
Corol´ario 4.1.3 Se o sistema hamiltoniano XH(q, p) satisfaz as hip´oteses
(H2
1)−(H3), ent˜ao o equil´ıbrio(q, p) = (0,0)deste sistema ´e inst´avel segundo
Liapunov.
Demonstrac¸˜ao ´
E claro que as hip´oteses (H12)−(H3) implicam nas hip´oteses (H1)−(H3),
ent˜ao de maneira similar ao feito na Proposi¸c˜ao 3.3.2 conseguimos aqui tamb´em um n´umero ε > 0 e um conjunto Ws := Ws1/2 ∩Bε, onde Ws1/2
neste caso particular, ´e obtido como um elemento da fam´ılia a um parˆametro
Wsλ ={q∈Ω|Q(q, λ)<0}comλ∈[0,1], de conjuntos semi-alg´ebricos, onde
Q(q, λ) =νjsΠ(q) +λh
ν−1
X
r=k
(r−ν)Πr(q) + s−1
X
ℓ=ν+1
(ℓ−ν)Πℓ(q) + (s−ν)Πs(q)
i
Para εpequeno suficiente, o conjunto Ws := Ws1/2∩Bε tamb´em satisfaz a
Proposi¸c˜ao 3.3.2 com constantes α= s2−νν e β = s−2ν.