Registro Geométrico e Radiométrico Automático de
Imagens Landsat-TM na Amazonia pela Maximização
da Informação Mútua
Dissertação apresentada ao Curso de Pós- Graduação em Ciência da Computação da Universidade FederaJ de Minas Gerais, como requisito parcial para a obtenção do grau de Mestre em Ciência da Computação.
Belo Horizonte
FOLHA DE APROVAÇAO
Registro Geométrico e Radiométrico Automático de Imagens Landsat-TM na Aniazônia, pela
Maximização da Informação Mútua
JOSÉ PINHEIRO DE QUEIROZ NETO
Dissertação^efendidaj;&<Cpr-evada pela banca examinadora constituída pelos Senhores:
'itf. Mário Fernandq^ontenegro Campos ~ Orientador Departaríiento de Ciência da Computação - ICEx ~ UFMG
ProL Bruce Walker N/elson - Co-orientador Instituto Nacional de Pesquisas da Amazônia ~ MCT
P^í^ÔífíTALDo ^OA^s Silveira Filho ^departamento de Cartografia - IGC - UFMG
■■ vldo de Albuquerque Arauj Prof. Arna'ldo de Albuquerque Araújo
Departamento de Ciência da Computação - ICEx - UFMG
Agradecimentos
Ao Prof Mário Fernando Montenegro Campos, pela amizade, confiança e dedicação na orientação deste trabalho.
Ao Dr. Bruce Walker Nelson, pela oportunidade de desenvolver um trabalho voltado à minha região, pelo apoio e co-orientação deste trabalho.
Aos Profs. Nívio Ziviani e Edjard Mota. pelo esforço e dedicação, sem os quais não seria possível a realização do mestrado inter-institucional UFMG/FUA.
Aos Drs. Alexei Machado, Frederik Maes, Leila Fonseca e Britaldo Soares Filho, pela atenção e sugestões ao trabalho.
Ao Prof José Luiz de Souza Pio, pela colaboração no exame deste trabalho.
Aos Profs. Alberto Laender, Claudiooor Coelho, Antônio Alfredo Loureiro, Sérgio Campos e Alberto Nogueira, pelos conhecimentos valiosos que me transmitiram.
Ao Centro Federal de Educação Tecnológica do Amazonas, na pessoa do Prof Vicente Gimenez, pela oportunidade e auxílio financeiro.
Aos Cel. Antonio S. Sanches, Ten. Evandro B. Barbosa e Sgt. Robson P. Álvares, da 4" DL do Exército Brasileiro, pela experiência e ensinamentos repassados.
Aos colegas Guilherme, Flávio, Bruno, João e toda a equipe do VERLAB. pela amizade e companheirismo.
Aos amigos Adeildo, Ana, André, Arlindo, Daniela, Danielle, Eduardo, Ernande, Eudo, Flávio, Gilbert, Gilberto, Márcia, Mauricio, Nakamura, Patrícia. Rosana, Sérgio, Suely, Tanara, Tania, e Tayana, pela convivência e amizade nesta fase de minha vida.
A minha mãe D. Joana, minha esposa Michelle, minhas filhas Larissa e Juliana, meus irmãos e familiares, pelo amor e compreensão.
Sumário
Lista de Tabelas
4.1 Valores iniciais dos índices das transformações geométrica e radiométrica. . 48 4.2 Valores experimentais obtidos para definir o vetor de índices inicial 49 4.3 Imagens utilizadas no experimento 1 56 4.4 Resultados dos índices da transformação geométrica, divididas em rotação
{fx e ry) , escala (e^ e ey) e translação {tx e ty) 57 4.5 Resultados dos índices da transformação radiométrica 58 4.6 Imagens utilizadas no experimento 2 60 4.7 Resultados dos índices da transformação geométrica, divididas em rotação
{tx e ry) , escala (ci e Cy) e translação {tx e ty) 61 4.8 Resultados dos índices da transformação radiométrica, divididos em ganho
{ga) adimensional e compensação (of) em pixels 61 4.9 Imagens multi-temporais da cena 231_062 utilizadas para obtenção dos re-
sultados ^2 4.10 Resultados dos índices da transformação geométrica, divididas em rotação
(t*! e Ty) , escala (cx e e,,) e translação (íi e íy) 65 4.11 Resultados dos índices da transformação radiométrica, divididos em ganho
{gá) adimensional e compensação {of) em pixels 65 4.12 Resultados do erro geométrico em pixels do experimento 1 72 4.13 Resultados do erro geométrico em pixels 72 4.14 Resultados dos erros radiométricos em DN's do experimento 2, utilizando
RABIM e ASCR 73 4.15 Resultados dos erros radiométricos em DN's do experimento 3, utilizando
Lista de Figuras
1.1 Recorte da Cena 231_062 em composição colorida das bandas 3, 4 e 5, onde aparece a cidade de Manaus e a área da Reserva Ducke 3 3.1 A esquerda a imagem de referência (1995) e a direita a imagem a ser regis-
trada (1999) 21 3.2 Diagrama de dispersão da banda TM-5 contendo os valores dos pixels das
imagens de referência(1995) no eixo horizontal e a ser registrada (1999) no eixo vertical 23 3.3 Ilustração dos conceitos radiométricos básicos, adaptada de
[Trucco and Verri, 1998] e [Lillesand and Kiefer, 1987| 35 3.4 Método de Powell: O primeiro passo desloca a fimção na direção x e y ao
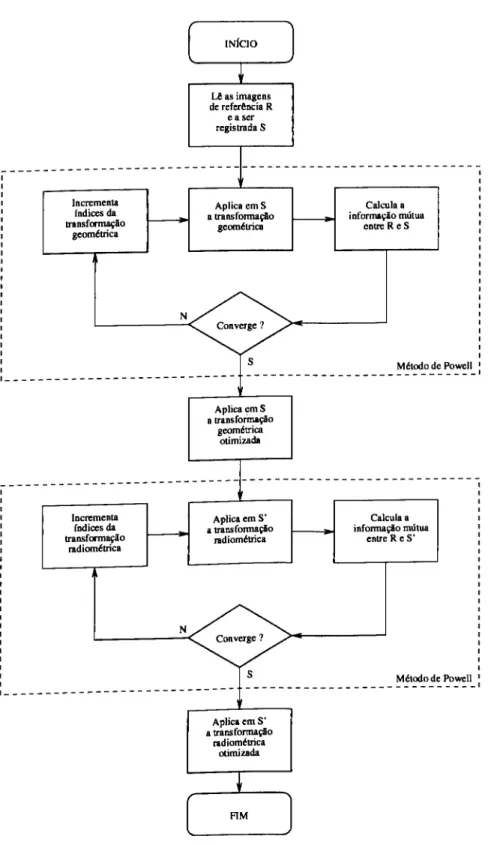
ponto P, e a minimização continua a partir deste. A resultante r se aproxi- ma, a cada iteração, do mínimo da função (adaptada de [Press et al., 1992]). 39 4.1 Fluxograma do Programa RABIM (Registro Automático Baseado em Infor-
ma,ção Mútua) 44 4.2 À esquerda a imagem de referência (1995) e à direita a imagem a ser regis-
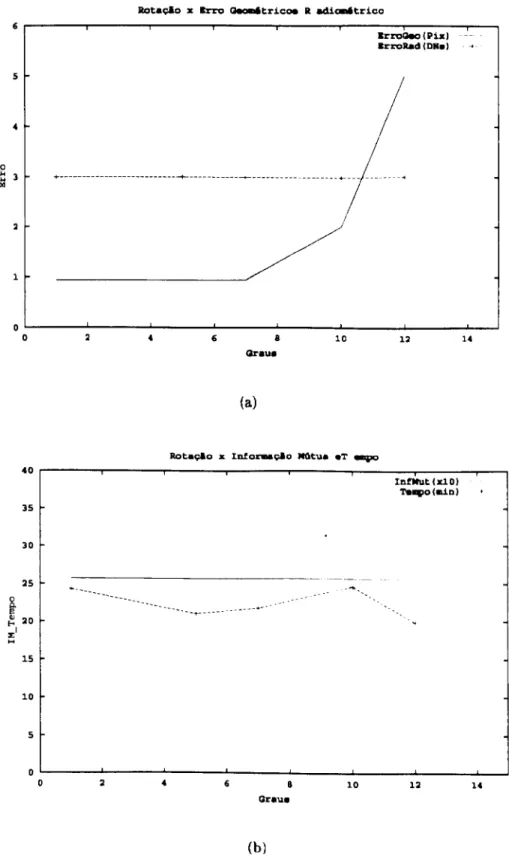
trada (1999) 48 4.3 (a) erros geométrico (em pixels) e radiométrico (em DN) e (b) informação
mútua (xlO) e tempo de processamento em minutos, para diferentes valores iniciais de rotação 50 4.4 (a) erros geométrico (em pixels) e radiométrico (em DN) e (b) informação
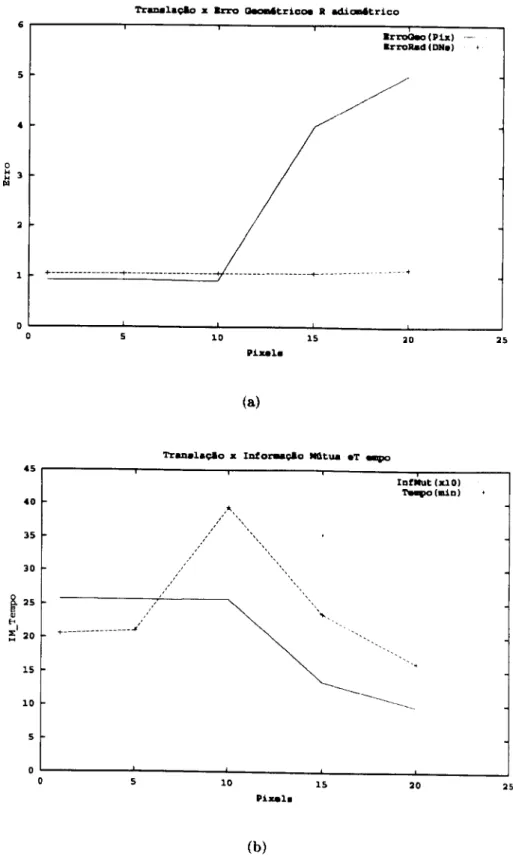
mútua (xlO) e tempo de processamento em minutos, para diferentes valores iniciais de translação 51 4.5 (a) erros geométrico (em pixels) e radiométrico (em DN) e (b) informação
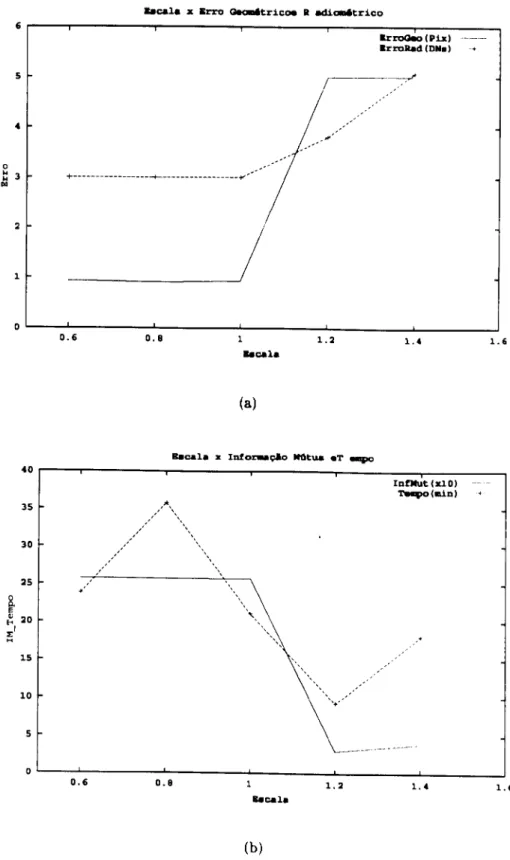
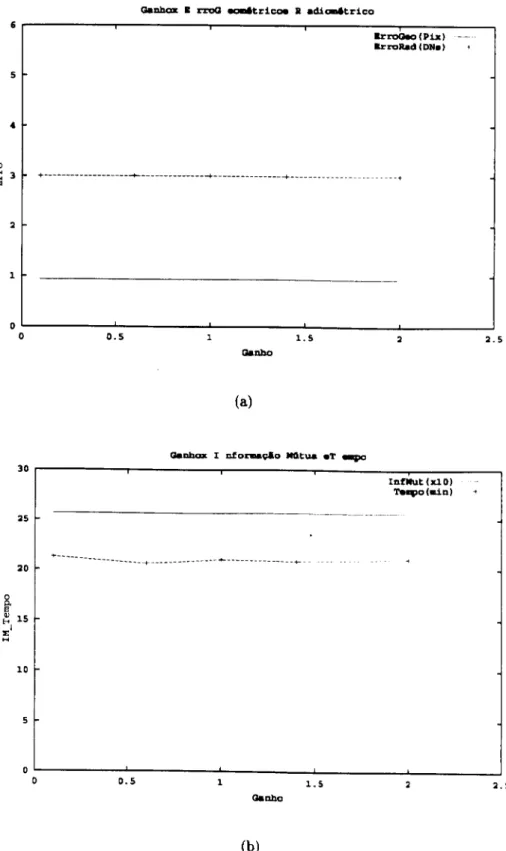
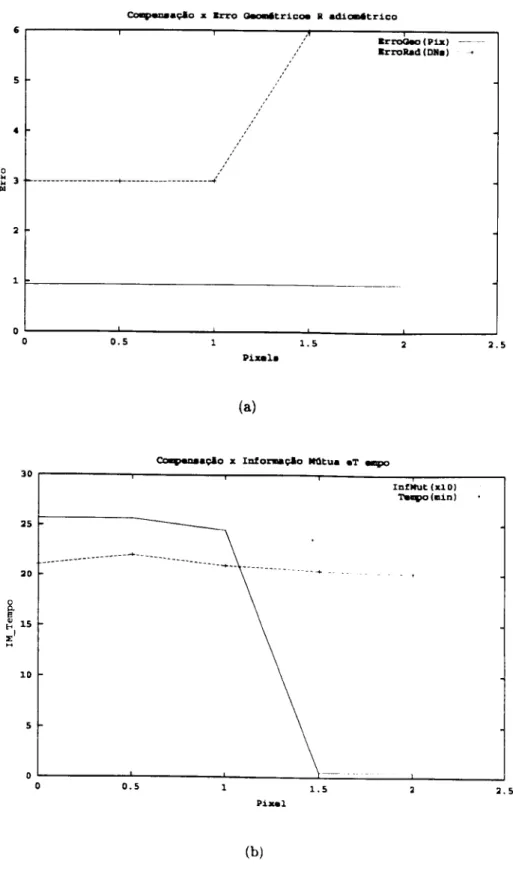
4.6 (a) erros geométrico (em pixels) e radiométrico (em DN) e (b) informação mútua (xlO) e tempo de processamento em minutos, para diferentes valores iniciais de ganho radiométrico 53 4.7 (a) erros geométrico (em pixels) e radiométrico (em DN) e (b) informação
mútua (xlO) e tempo de processamento em minutos, para diferentes valores iniciais de compensação radiométrica aditiva 54 4.8 (a) Imagem de referência TM945AM; (b) Imagem a ser registrada
TM925AM; e (c) Resultado do registro 57 4.9 (a) Imagem de referência TM955AM; (b) Imagem a ser registrada
TM975AM; e (c) Resultado do registro 58 4.10 (a) Imagem de referência TM945AM; (b) Imagem a ser registrada
TM965AM; e (c) Resultado do registro 59 4.11 (a) Imagem de referência Mao95; (b) Imagem a ser registrada Mao99; e (c)
Resultado do registro 61 4.12 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
a ser registrada 1 (1985) 62 4.13 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
a ser registrada 2 (1988) 63 4.14 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
a ser registrada 3 (1990) 63 4.15 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
a ser registrada 4 (1999) 64 4.16 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
1 registrada (1985) 66 4.17 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
2 registrada (1988) 66 4.18 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
3 registrada (1990) 67 4.19 Imagem da esquerda a imagem de referência (1995) e da direita a imagem
4 registrada (1999) 67 4.20 Pontos de teste utilizados nas imagens de referência TM955AM (esquerda)
e TM945AM (direita) do experimento 1 para a medida do erro geométrico. 69 4.21 Pontos de teste utilizados no experimento 2 para a medida do erro geométrico. 69 4.22 Pontos de teste utilizados no experimento 3 para a medida do erro geométrico. 70 4.26 Comparação do erro radiométrico da banda 3 em DN's entre os métodos
4.27 Comparação do erro radiométrico da banda 4 em DN's entre os métodos RABIM e ASCR. No eixo horizontal as imagens 1 (1985), 2 (1988), 3 (1990) e 4 (1999) 76 4.28 Comparação do erro radiométrico da banda 5 em DN's entre os métodos
RABIM e ASCR. No eixo horizontal as imagens 1 (1985), 2 (1988), 3 (1990) e 4 (1999) 76 4.23 Histogramas da banda 3 do experimento 2 77 4.24 Histogramas da banda 4 do experimento 2 78 4.25 Histogramas da banda 5 do experimento 2 79 4.29 Histogramas da banda 3 de 1999 do experimento 3 80 4.30 Histogramas da banda 4 de 1999 do experimento 3 81 4.31 Histogramas da banda 5 de 1999 do experimento 3 82 5.1 (a) Imagem de referência (1995), (b) Imagem 1 registrada (1985), e (c) Erro
radiométrico em DN's das bandas 3, 4 e 5 dos métodos RABIM e ASCR. . 87 5.2 (a) Imagem de referência (1995), (b) Imagem 4 registrada (1999), e (c) Erro
radiométrico em DN's das bandas 3, 4 e 5 dos métodos RABIM e ASCR. . 88 D.l Pirâmide de imagens (3 níveis de resolução). O tamanho e a resolução
Lista de Algoritmos
1 Diagrama de Dispersão 22 2 Implementação do Cálculo da Informação Mútua 32 3 Implementação do Algoritmo de Powell 41 4 Implementação do Programa RABIM (Registro Automático Baseado em
Capítulo 1
Introdução
1.1 Motivação e Objetivo
Este trabalho visa estudar e implementar um método (tendo como referenciai as peculiaridades próprias das áreas da Floresta Amazônica) que permita o registro automá- tico de imagens multitemporais, considerando tanto as distorções geométricas quanto as radiométricas, com maior ênfase na normalização radiométrica.
ambientais para a região, o continente e o globo [INPA, 2000]. Em nível nacional, o INPA (Instituto Nacional de PesQuisas da Amazônia) tem dado uma importante contribuição ao conhecimento científico e tecnológico da Amazônia. O conjunto desses conhecimentos se tornou indispensável para uma correta formulação de políticas públicas regionais.
A pesquisa na área ambiental utiliza significativamente as imagens de sensoriamento remoto obtidas da floresta, efetuado por sensores orbitais, principalmente o Mapeador Temático (TM) a bordo da série de satélites Landsat (Apêndice A). Estas imagens são utilizadas por pesquisadores diversos para que possam concluir com êxito seus objetivos, dentro de cada projeto específico. Estudos comparativos utilizando diretamente imagens obtidas em épocas distintas têm se mostrado uma tarefa difícil, devido aos efei- tos causados pelas distorções geométricas e distorções radiométricas presentes nas imagens.
1.2 Descrição do Problema
Figura 1.1: Recorte da Cena 231_062 em composição colorida das bandas 3, 4 e 5, ondo aparece a cidade de Manaus e a área da Reserva Ducke.
A floresta da Reserva é pouco alterada. Até 1991, alterações na paisagem visíveis em imagens de satélite representavam apenas 5% de sua área total. Nos últimos anos a cidade chegou aos limites Sul e Oeste da Reserva, hoje adjacente ao bairro Cidade de Deus. Apenas no limite Leste a Reserva continua ligada à floresta contíinia. Os principais problemas de extrativismo e invasões foram minimizados com a construção em 199'l/95 de uma cerca nos limites Sul e Oeste e por uma fiscalização mais rígida. A caça é uma atividade bastante intensa e constitui um dos principais problemas. Nestas áreas de conflito entre a cidade e a floresta, o INPA vem desenvolvendo um programa de educação ambiental e mais recentemente, está em planejamento a criação de um Jardim Botânico com o apoio da Prefeitura de Manaus.
ental, produzir uma série temporal destas imagens, que possam mostrar o crescimento desordenado dos bairros na periferia que colocam em risco a Reserva. Para concluir esta série temporal, será necessário, primeiramente, executar o registro entre as imagens obtidas em épocas distintas.
Atualmente, o registro é feito com o auxílio de aplicativos que demandam a definição manual dos pontos de controle entre uma imagem de referência e a imagem a ser registrada. Em sua maioria, esses métodos corrigem apenas geometricamente a imagem. Utilizar a técnica de registro por pontos de controle para uma série multitemporal se toma um problema, pois um ponto tomado em uma imagem de referência, correspondente a uma determinada região na cena, pode não ser visível em uma outra imagem a ser corrigida, seja pela mudança naturaJ da região, seja pela ação humana. Além disto, é difícil obter pontos de controle em áreas da Floresta Amazônica, com grandes regiões de densa vegetação, muitas vezes sem estradas, construções ou outro tipo de feição na imagem que possa ser considerado como um ponto de controle confiável.
Para um registro que envolve ao mesmo tempo as questões de geometria e radiometria da imagem, há que se considerar o Problema da Correspondência. Este problema se refere a identificação em imagens distintas, de pontos que são a projeção do mesmo ponto da cena. No problema em estudo, esse problema é dificultado, pois em geral necessita-se da imagem corrigida geometricamente para aplicar uma técnica de normalização radiométrica, e por outro lado precisa-se da imagem radiométricamente corrigida ou normalizada, para que se possa aplicar uma função para correção geométrica (Seção 3.1). Portanto, o problema pode ser resumido da seguinte forma:
rência e a imagem a ser registrada, considerando o Problema da Correspondência.
• Definir um critério para avaliação do registro.
• Como uma aplicação, produzir uma série temporal de imagens de satélite da Reserva Florestal Ducke, com fins educacionais, de propriedade do INPA.
1.3 Relevância e Contribuições
Os sistemas de processamento de imagens de sensoriamento remoto não disponibilizam técnicas de registro automático. Além disso, o registro manual é uma tarefa passível de erro, e demanda muito tempo. Este trabalho tem sua relevância ao permitir que pesquisadores da área ambiental e afins, possam concentrar-se no objeto de suas pesquisas, sem necessariamente despenderem tempo no processo de registro.
Dentro da revisão bibliográfica, encontraram-se vários trabalhos relacionados à área, mas nenhum que trate simultaneamente com a correção de ambas as distorções - geomé- tricas e radiométricas -, o que reforça o caráter inovador da metodologia proposta, tendo como principais contribuições:
• Um algoritmo para registro de imagens, considerando ambas as distorções geométri- cas e radiométricas.
• Um método para normalização radiométrica de imagens, baseada na informação mú- tua como métrica de similaridade.
Estado da Arte do Registro Geométrico
e Radiométrico
Neste capítulo são discutidos alguns trabalhos relacionados ao registro de imagens em sensoriamento remoto, com ênfase à correção radiométrica, dando uma visão crítica sobre o assunto, e fazendo algumas comparações pertinentes ao escopo do nosso trabalho. Cabe ressaltar que os trabalhos aqui descritos tratam de correção das distorções ou geométricas ou radiométricas separadamente, sejam semi-manual ou automaticamente, enquanto que este trabalho propõe uma ferramenta que faz o registro automático completo, considerando ambas as distorções geométricas e radiométricas. Alguns conceitos e informações sobre imagens e o sensor Mapeador Temático do satélite Landsat podem ser encontrados no Apêndice A, e conceitos sobre registro de imagens e correção geométrica e radiométrica podem ser encontrados no Apêndice B.
Ccirbono t6rr6StrG, fGrtilidadG g erosão do solo [Turner et al., 1993]. 0 uso de imagens multÍGspectrâis adQuiridas por sensorGS orbitais têm-se mostrado uma valiosa técnica para a extração dos dados destinados às várias aplicações de pesquisa de recursos naturais.
A imagem orbital teve início com as primeiras imagens obtidas pelo satélite meteoro- lógico MA-4-Mercury, e apresentou grande melhoria com as informações fornecidas pelos satélites Landsat4-TM, SIR-A, SIR-B e MOMS, lançados em 1983, todos utilizados na área de sensoriamento remoto. [Mika, 1997] apresenta um estudo sobre o histórico e de- senvolvimento dos sensores e instrumentos utilizados pela família de satélites Landsat, que obtiveram as imagens utilizadas neste trabalho. A extração das informações espectrais adquiridas pelos sistemas nas diferentes partes do espectro eletromagnético, visando a iden- tificação e discriminação dos alvos de interesse, depende, principalmente, da qualidade dos dados contidos nas imagens. Dois são as correções efetuadas nestas imagens: Geométrica e Radiométrica.
2.1 Registro Radiométrico
denominados pontos de controle, que são utilizados para determinar os coeficientes de uma função de transformação, geralmente linear que, aplicada à imagem, efetua a normalização desejada. O grande desafio, portanto, consiste em se identificar estes pixels invariantes e o tipo de transformação a ser utilizada. Trabalhos visando a correção radiométrica aòsoluta devido, principalmente, à calibração dos sensores, foram desenvolvidos em [Markham and Barker, 1987] e [Thome et al., 1997]. Na literatura, trabalhos que lidam com esse assunto, na sua grande maioria, tratam de normalização radiométrica, e não de correção radiométrica absoluta.
A normalização radiométrica de imagens, considerando os aspectos existentes entre uma imagem de referência e uma imagem a ser registrada, iniciou-se com a obtenção dos conjuntos de pvcels invariantes a partir dos extremos dados pelo diagrama de intensidade de verde - brilho desenvolvido em [Kauth and Thomas, 1976] como em [Chavez, 1988], e tiveram uma nova abordagem na utilização de técnicas de normalização baseadas em regressão linear [Jenson, 1983]. É importante observar que a retificação radiométrica citada por alguns pesquisadores é, na verdade, uma normalização radiométrica, chamada de riRN {Relative Radiometric Normalization) em [Elvidge et al., 1995]. Neste contexto, o problema concentra-se na obtenção destes conjuntos de pixels invariantes, muitas vezes uma tarefa difícil, principalmente se feita manualmente. Nosso trabalho utiliza uma abordagem diferente, pois verifica a similaridade entre as imagens, e não a busca de pixels invariantes, pois a busca de alvos claros e escuros invariantes e sem vegetação é praticamente impossível em algumas imagens da Amazônia.
possuir o mesmo valor digital (DN - Digital Number), fazendo então uma subtração entre os valores correspondentes às áreas mais escuras e utilizando este valor para fazer a correção [Chavez, 1988], consideração esta dificilmente alcançável em áreas da Amazônia sem sombras profundas e sem água livre de sedimentos. Outras duas abordagens são o método de normalização de Máximo-Mínimo (MM), que normaliza duas imagens considerando que ambas possuam valores de DN máximo e mínimo iguais, e o método de normalização de Média-Desvio Padrão (MS), que normaliza duas imagens considerando que a média e o desvio padrão dos DN's de cada banda das imagens seja o mesmo [Yuan and Elvidge, 1996]. Estas técnicas são limitadas às considerações tomadas, não permitindo sua generalização para a maioria das imagens obtidas, apesar disto, são aplicáveis em situações específicas onde se deseja tão somente uma melhoria visual da imagem, não sendo relevantes as informações radiométricas, que são comprometidas em razão das considerações assumidas ou restrições impostas.
[Schott et al., 1988) apresenta uma proposta que assume a existência de áreas que não sofreram alterações significativas entre a imagem de referência e a imagem a ser corrigida, utilizando alvos invariantes (utilizados como pontos de controle)conhecidos como PIF(Feições Pseudo-Invariantes), tais como estradas, áreas urbanas e centros industriais. Estas áreas são obtidas a partir da análise da razão entre as bandas do infravermelho e infravermelho próximo (Apêndice A), para identificar os pixels com pouca ou nenhuma cobertura vegetal, e estabelecer um limiar para eliminar os pixels equivalentes às áreas de água. Uma vez definidas as áreas para obtenção dos pixels invariantes, uma transformação linear é utilizada para fazer a normalização radiométrica.
áreâs possu6ni vâlor6s de DN mais altos, g qug são dG fácil id6ntificaçáo nas bandas XM-3 (infravermelho) e TM-4 (infravermelho próximo), mas que, considerando a região da Flores- ta Amazônica, pouco povoada e com extensas áreas de vegetação, dificilmente existirão em quantidade e qualidade suficientes. Além disto, a obtenção dos pontos de controle é feita de forma manual, e se faz necessário que as imagens já estejam geometricamente corrigidas.
Uma das principais contribuições é descrita em [Hall et al.. 1988] e [Hall et al., 1991], que desenvolveu um trabalho voltado à normalização radiométrica de imagens de satéli- te, embora o título do trabalho fale em retificação radiométrica. Este trabalho foi uma continuação da pesquisa iniciada em [Hall and Badhwar, 1987], e por ser ainda bastante utilizado, será descrito com mais detalhes a partir de seu algoritmo, que se baseia em dois pontos principais:
bandas, portanto com termos de ganho positivo em todas. Os autores aplicaram este diagrama para determinar os conjuntos de pixels da mesma cena entre duas imagens obtidas pelo Landsat-TM em épocas distintas, sob diferentes condições atmosféricas. Com base no diagrama, é possível determinar os conjuntos de pontos de controle, divididos em pixels claros, sendo aqueles com alto brilho médio em todas as bandas, e pixels escuros, com baixo nivel de brilho médio. Ambos os conjuntos escolhidos devem ter baixo conteúdo de vegetação com folhas.
• Encontrar uma transformação linear que retifique radiometricamente a imagem. Esta transformada é do tipo Y' = a + bY, onde F é o pixel da imagem a ser registrada, F' é o pixel da imagem normalizada radiometricamente, a e ò são coeficientes calcu- lados a partir do conjunto de pixels invariantes, mais especificamente, utilizando os conjuntos de alto brilho e baixo brilho médio em todas as bandas. Várias fórmulas são apresentadas, demonstrando como tornar estes pontos de controle os coeficientes da transformação linear.
que os 5% menos verdes terão alguma vegetação em ambas as imagens e o brilho pode variar caso haja variação na deciduidade/foliosidade entre as duas datas. Portanto, os conjuntos de alvos escuros e claros não são realmente invariantes entre uma data e outra. É especialmente problemático quando os fatiamentos acabam incluindo pas- tos como os alvos mais claros e menos verdes, pois estes são muito variáveis espectralmente.
[Elvidge et al., 1995] têm-se dado grandes contribuições a área de normaliza- ção radiométrica, desenvolvendo uma técnica diferente da técnica desenvolvida por [Hall et al., 1991], e que convencionaram chamar de Normalização Radiométrica Relativa. Similarmente às outras técnicas, é também baseada em um conjunto de pixels invariantes são utilizados para calcular os coeficientes da transformação linear. A grande diferença encontra-se na utilização de um diagrama de dispersão com regressão linear controlada para definir este conjunto de pixels automaticamente. A técnica de regressão linear baseia-se na observação de uma banda espectral que possui uma relação linear entre os valores digitais de duas imagens obtidas de uma mesma cena, e é controlada para desconsiderar piseis que sofreram mudanças, estabelecendo experimentalmente uma largura de faixa de 10 DN em torno da linha central" do diagrama, e utilizando métodos estatísticos próprios da regressão linear [Montgomery. 1992] para ajustar esta faixa.
que de fato ocorre quando muda a quantidade de sedimentos em suspensão dentro da água entre uma data e outra. Tem como desvantagem o fato de necessitar Que as imagens estejam corrigidas geometricamente, etapa esta que depende da escolha manual dos pontos de controle geométricos, e que provoca mudanças nos valores dos pixels devido à reamostragem, com maior ou menor alteração no DN, dependendo do tipo utilizada. A abordagem aqui apresentada efetua ambas as correções, geométrica e radiométrica, de forma automática, não necessitando de qualquer pre-processamento das imagens.
Mais recentemente, [Heo and FitzHugh, 2000] sugerem a utilização de uma técnica padrão para normalização radiométrica, que consiste em um sistema de regressão linear e um método de estudo residual, para determinação de pontos inválidos, utilizando um critério de decisão padrão, obtido a partir de análises banda a banda do conjunto de pontos de controle em potencial. Caso o critério não seja alcançado, este conjunto é descartado e a verificação é refeita até atingir-se o critério estabelecido. Embora proponha um método padrão, não foge muito ao modelo proposto por Elvidge, trazendo ainda a desvantagem da subjetividade na obtenção do primeiro conjunto de pontos de controle, além de apresentar um conjunto de pré-condições rígidas, não alcançáveis em muitas áreas que são objeto de estudos.
2.2 Registro Geométrico
A correção geométrica busca modificar a geometria da imagem, de forma que a posição, o tamanho e o formato do pixel, que foram alterados durante o processo de aquisição da imagem, sejam ajustados em relação a um referencial, seja uma imagem de referência ou um sistema de referência geográfica utlizando uma projeção cartográfica específica. A correção radiométrica afeta os valores dos níveis de cinza da imagem, visa compensar as distorções na mensuração da radiância do alvo, inseridas pelo sensor óptico no processo de geração das imagens digitais e devido aos efeitos atmosféricos e de iluminação no momento de sua aquisição.
[Brown, 1992] apresenta um trabalho demonstrando várias técnicas de registro de imagens, nas quais são realizadas correção geométrica, propõe critérios para a escolha do método de correção geométrica, bem como o tipo de transformação e reamostragem mais adequadas. [Kardoulas et al., 1996) relata resultados da correção geométrica utilizando GPS {Global Positioning System) para se determinar os pontos de controle, tomados au- tomaticamente e referenciados em um mapa topográfico. [Fonseca and Manjunath, 1996] descreve algoritmos de registro de imagens, fazendo um estudo comparativo entre eles. tomando como base o processo de casamento, as feições utilizadas e o tipo de transforma- ção, tendo como resultado os méritos e limitações de cada um.
em seguida a mesma é decomposta e representada por wavelets que são utilizadas para detecção de feições e obtenção dos pontos de controle geométricos, com posterior aplicação de uma transformação polinomial baseada nestes pontos.
Os resultados obtidos em [Fonseca, 1999] são de boa qualidade quanto à correção geométrica, e aliada à técnica de normalização radiométrica de [Elvidge et al., 1995], podem tornar todo o processo automático, o que precisaria ainda ser analisado com mais critérios. Neste trabalho, no entanto, é utilizada uma abordagem que não depende dos pontos de controle geométricos, não necessita de pré-processamento das imagens, e não é dependente da presença de um pico de freqüência de pixels de água como em [Elvidge et al., 1995].
Muitas aplicações envolvendo imagens requerem seu registro, em particular sua cor- reção geométrica, e existem diferentes tipos de algoritmos para realizá-la [Brown, 1992], Recentemente, um novo tipo de solução tem sido bastante utilizado em imagens médicas, devido sua robustez e facilidade de implementação em transformações rígidas, conhecido como registro de imagens baseado em informação mútua [Egnal, 2000). [Viola, 1995] e [Wells et al., 1995], assim como [Collingnon et al., 1995] desenvolveram esse método independentemente em 1995. A informação mútua é, então, uma métrica de similaridade entre duas imagens, baseada na Teoria da Informação [Shannon, 1948], que mede o grau de interdependência dos valores dos pixels de cada imagem, através de cálculos probabilísticos. Embora de uso corrente em imagens médicas, seus conceitos são também aplicados às imagens de satélite em sensoriamento remoto, como será visto no escopo deste trabalho (Seção 3.2).
rência e outra a imagem a ser registrada. Basicamente, escolhe-se um conjunto de pontos na imagem (ou a imagem inteira), utilizando uma transformação afim (Apêndice B) inicial que é aplicada à imagem a ser registrada, e em seguida compara-se a similaridade, através da informação mútua, entre esta e uma imagem de referência. A correção acontece quando a informação mútua entre ambas é máxima, e isto é verificado tomando-se a derivada desta em relação aos valores dos pontos utilizados na transformação afim. Se a derivada for próxima de zero, o algoritmo termina, caso contrário, é verificada a convergência através do gradiente e gerados novos valores dos índices da transformação afim, que é reaplicada e assim sucessivamente. O algoritmo continua até que a convergência indique a máxima informação mútua alcançada, ou o número máximo de iterações na busca seja atingido. Para estimar a freqüência dos pixels no cálculo das probabilidades, utiliza-se uma técnica conhecida como Parzen Window [Viola and Wells, 1997]. É um trabalho pioneiro e motivou uma série de outros trabalhos utilizando a mesma conceituação, como em [Gilles, 1996], [Viola and Wells, 1997], [Thévenaz and Unser. 1998], [Maintz et al.. 1998] e [Rogelj and Kovacic, 2000]. Em todos a questão da radiometria não é apreciada, uma vez que imagens médicas, em geral de tomografia computadorizada e ressonância magnética, possuem um processo de aquisição bastante controladó, diferente do processo de aquisição de imagens de satélite.
e [Maes et al., 1998], que serviram de base teórica para este trabalho, principalmente os trabalhos desenvolvidos por Maes, com quem tivemos ainda alguns contatos e trocas de informações.
Jeremy Bonet utilizou informação mútua em imagens de radar, basicamen- te para a detecção de pontos de controle para posterior correção geométri- ca [Bonet and Chão, 1998] (Bonet et al., 1998], similar ao trabalho de [Fonseca, 1999], sendo que com a abordagem da informação mútua como métrica de similaridade. Uma vez identificados os pontos de controle geométrico, uma transformação polinomial é aplicada à imagem, não havendo portanto busca baseada na informação mútua máxima.
[Gilles, 1996], além de fazer uma abordagem bem interessante sobre o uso da informa- ção mútua, faz um comparativo entre as técnicas de Viola e Collingnon, utilizando esta última, inclusive, em uma imagem de satélite, banda infra-vermelho, onde gera artifici- 1 i. f.r.Tn rntarão de 0 = —30 e efetua sua correção. Cabe ressaltar almente uma imagem com rotaçao ue c ^
Capítulo 3
Metodologia Utilizada
3.1 O Problema do Registro de Imagens Multi-
Temporais
Imagens adquiridas por sensores a bordo de satélites ou aeronaves possuem distorções geométricas e radiométricas. As distorções geométricas modificam a geometria da imagem, de forma que a posição, o tamanho e o formato do pixel são alterados durante o processo de aquisição. Várias são as fontes que causam os erros na geometria da imagem, tais como a rotação da Terra durante o processo de aquisição, a curvatura da Terra, variações de velocidade e altitude da plataforma, mudanças na elevação topográfica, parâmetros do sensor, entre outros [Fonseca, 1999].
imagens [Hall et al., 19911, ou seja, se uma imagem for adquirida em um dia ensolarado, em um determinado horário, com certo ganho dos sensores do satélite, e uma outra imagem for adquirida em um outro dia, nublado, em horário próximo, mas distinto do anterior, com ganho diferente dos sensores, certamente a diferença radiométrica entre ambas será grande.
O problema do registro entre duas imagens obtidas de uma mesma cena pode ser entendido como sendo uma forma de fazer as correções geométrica e radiométrica, ou seja, como uma operação que faz com que uma imagem se sobreponha a outra, de modo que cada par de pontos sobrepostos corresponda ao mesmo ponto da cena real [Fonseca, 1999] e mantenha seu nível de intensidade de cinza, caso não tenha ocorrido mudança na região deste ponto.
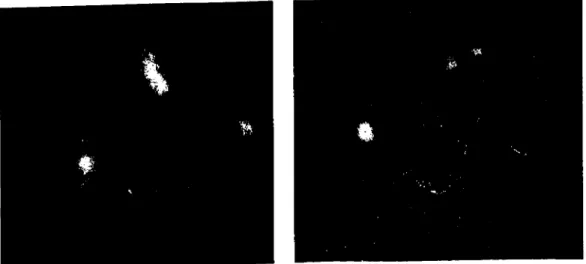
A Figura 3.1 apresenta duas imagens da cena 231_062 obtidas pelo satélite Landsatõ em duas épocas distintas, banda õ do sensor TM no formato escala de cinza. A primeira de 03/08/1995, aqui chamada de imagem de referência, pois a mesma já se encontra geo-referenciada, e a segunda de 15/09/1999, aqui chamada de imagem a ser registrada. Esta cena envolve uma região de 175x175 Km^ do estado do Amazonas, na qual pode-se perceber os rios Negro e Solimões, e a cidade de Manaus.
Figura 3.1: A esquerda a imagem de referência (1995) e a direita a imagem a ser registrada (1999)
Algoritmo 1 Diagrama de Dispersão £iiitra.(lã: Imagem de referência li e imagem a ser registrada S,
Saída: Diagrama de Dispersão entre as duas imagens, Início
Para i = O Até n Faça Para j = O Até m Faça
X 4- s[í][j]; y
Desenha o ponto {x,y) no diagrama de dispersão;
Fim
Onde r[i][j] e s[^[j] são os valores das intensidades dos pixels das imagens de referência e a ser registrada 5, respectivamente, de tamanhos nxm. Os eixos do diagrama são os valores dos pixels de O a 255, sendo a imagem de referência o eixo vertical e a imagem a ser registrada o eixo horizontal, conforme a Figura 3.2, que apresenta o diagramação de dispersão para as imagens da Figura 3.1, banda 5, isto após efetuada a correção geométrica entre ambas, condição necessária para geração do diagrama.
Dlagrana dm DÍBp«rBãol9 95x1999(b andaS)
150 a aarc orrlglda
Fieura 3 2- Diagrama de dispersão da banda TM-5 contendo os vdores dos püels das iSens de referência(1995) no eixo horizontal e a ser registrada (1999) no eixo vertical
Até o momento, têm sido consideradas duas imagens de uma mesma cena. Agora serão utilizadas várias imagens de uma mesma cena, na qual fay-se necessário registrar cada uma delas, para criação de uma série multi-temporal, muito utilizada para avaliar o desenvolvimento de uma dada região em relação à cobertura vegetal, ao desmatamento, ao crescimento de cidades, novas estradas, entre outros. Utilizar a técnica de registro por pontos de controle se torna um problema, pois um ponto tomado em uma imagem de referência pode não mais se encontrar em uma das imagens a serem registradas, seja pela mudança natural, seja pela ação humana, ou seja até pelo aparecimento de uma nuvem justamente sobre aquela região. Isto considerando-se apenas a correção geométrica.
e com isto permitir efetuar a correção geométrica das imagens, utilizando uma transfor- mação polinomial como em [Brown, 1992]. Certamente isto implica em uma redução na qualidade do registro, pois não raro, a distribuição dos pontos de controle nas imagens pode não ser a mais adequada, pois a condição desejada é uma distribuição mais uniforme possível, o que terá impacto nos resultados obtidos.
A correção radiométrica, entretanto, se torna um caminho complicado, pois seriam necessários os levantamentos das condições que influenciam na distorção radiométrica, entre todas as imagens a serem registradas, tais como ângulo de elevação do sol, condições atmosféricas, ângulo de visada do satélite e ganho dos sensores. Essas informações podem se tornar impossíveis de serem obtidas para imagens antigas, de 10 ou 20 anos atrás, adquiridas por diferentes instituições, ainda que utilizando o mesmo satélite, e que são de interesse para a criação da série multi-temporal.
[Elvidge et al., 1995] , [Hall et al., 1991] e outros pesquisadores, como visto no Capítulo 2, propuseram, em vez de correção, uma normalização radiométrica das imagens a serem registradas em relação à imagem de referêiicia. Ou seja, dados os valores de intensidades dos pixels que não sofreram alterações naturais, aplica-se uma transformação linear, baseada nestes pnels, para tornar os valores dos demais phels, da imagem a ser registrada, equivalentes aos da imagem de referência. Com isto, todas as imagens da série multi-temporal ficariam nas mesmas condições em relação à radiometria.
trabalhos que desenvolvem apenas a correção radiométrica, através da normalização das imagens, já partindo de imagens que estejam geométricamente corrigidas. Isto ocorre devido ao Problema da Correspondência, que pode ser representado por:
S{x,y) = G{R{T{x,y))) (3.1)
Onde R e S são, respectivamente, as imagens de referência e a imagem a ser registrada, T é uma função de transformação 2D que mapeia duas coordenadas x e y, para novas coordenadas x' e y', conforme B.2 (Apêndice B), e G é a função ID de transformação radiométrica. Em outras palavras, existe uma interdependência entre estas duas funções, de tal forma que é necessário corrigir a imagem geometricamente, para posteriormente realizar a normalização radiométrica. Por outro lado, para que se possa realizar a correção geométrica, sem que sejam necessárias operações de pré-processamento da imagem, que alterariam sua radiometria, é necessário que primeiramente se tenha a imagem radiometricamente corrigida ou normalizada.
3.2 O Registro de Imagens Utilizando Informação Mú-
tua
A Informação Mútua (IM) como métrica de similaridade tem sido aplicada, de um modo geral, no registro de imagens médicas, a par- tir de uma transformação rígida, com bons resultados empíricos como em (Gilles, 1996], [Viola and Wells, 1997], [Thévenaz and Unser, 1998], [Maintz et al., 1998], [Rogelj and Kovacic, 2000], [Maes et al., 1996], [Gilles, 1996], [Maes et al., 1997a|, [Maes et al., 1997b] e [Maes et al., 1998], todos envolvendo tão somente a correção geométrica entre as imagens. Nesta seção será discutida a utilização da informação mútua aplicada ao registro de imagens de satélite, utilizando-a tanto na correção geométrica quanto na correção radiométrica das imagens.
3.2.1 Descrição do Método
Existem diversas maneiras de se classificar os algoritmos de registro. Uma delas, bem objetiva, é apresentada por [Brown, 1992], e pode ser encontrada no Apêndice B, que classifica os algoritmos com base em.
• Característica do Espaço: Que informação na imagem é utilizada para o casamento (i.e. intensidade do pixel ou pontos de controle selecionados).
• Espaço de Busca: A classe de transformações que são assumidas como sendo capazes de alinhar as imagens (i. e. transformação afim ou polinomial).
• Métrica de Similaridade: Como a estratégia de busca mede o mérito relativo para cada transformação candidata (i.e. correlação ou correlação cruzada).
A informação mútua é a métrica de similaridade utilizada neste trabalho. Outras métricas podem ser encontradas no Apêndice C. A origem da IM é creditada a Shan- non [Shannon, 1948] em um artigo publicado em 1948, onde trata de varias de suas utilizações, incluindo estatística básica, teoria da comunicação e análise de complexidade [Egnal 2000]. Apenas mais recentemente foi utilizada para o registro de imagens médicas, com um método desenvolvido independentemente em 1995 por Viola [Viola, 1995] e Collingnon et al [Collingnon et al., 1995].
A informação mútua IM está relacionada à entropia, que é uma técnica estatística que mede a aleatoriedade de uma variável randômica, através da equação [Maes et al., 1997a]:
IM{A, B) = H{A) + H{B) - H{A, B) (3.2)
IM{A,B) = H{A)-H{A\B) (3.3)
IM{A,B) = H{B)-H{B\A) (3.4)
Com H{Á) e H{B) sendo a entropia de ^ e J3, H{A, B) sua entropia conjunta e H{A\B) a entropia condicional de A dado B e H{B\A) a entropia condicional de B dado
H{A) = - PA{a)\ogPA{a) (3.5) a
H{A,B) = - PAB{a,b)\ogPAB{a,b) (3.6) a,6
Sendo P^(a) a probabilidade de A, PabÍQ, b) a probabilidade conjunto de A e B e PA\B{a\b) a probabilidade condicional de A dado B. A entropia H{A) indica a medida da incerteza sobre o valor de uma variavel aleatória A, enquanto H{A\B) é a incerteza do valor de A conhecido B. Portanto, da Equação 3.3, IM{A,B) é a redução na incerteza da variável aletória A a partir do conhecimento de outra variável aleatória B, ou equivalentemente, a medida de informação que B contém sobre A. A informação mútua satisfaz as seguintes propriedades:
1. Não Negatividade: IM{A,B) > 0.
2. Independência: /A/(^, 5) = O PAsia, b) - P^(a).PB(ò) = 0.
3. Simetria: IM{A,B) = IM{B, A).
4. Auto-informação: IM(A,A) = H{A).
5. Limites: O < IM{A,B) < min{IM{A,A)JM{B,B)).
6. Invariância: Se T{A) é função de transformação que mapeia ^ de 1 : 1, então IM{A,T{A)) = IM{A,A).
A informação mútua IMrs, que expressa a similaridade entre uma imagem de referência Re a. imagem a ser registrada S, definida a partir das Equações 3.2, 3.5 e 3.6, é dada por [Machado, 1999].
s) = ») log (3.8) (r,s)
Onde r e s são os valores de intensidade dos pixels das imagens R e S, respectivamente, e Ps{s) as distribuições de probabilidade de r e s em cada imagem, e Prs{t,s) a distribuição da probabilidade conjunta de r e s.
3.2.2 Análise de Complexidade
A implementação da métrica da informação mútua ainda é bastante limitada, devido sua complexidade de custo computacional. Esta é uma das principais ratões que fazem com que a métrica, na prática, seja aplicada basicamente a transformações rígidas. Considerando este caso, a avaliação de todas as possibilidades dos parâmetros de rotaçao, translaçao e escala consome bastante tempo. A eficiência da métrica em relação à complexidade de tempo é afetada, basicamente, pelos seguintes aspectos, como visto no Algoritmo 2 apresentado na próxima seção:
1. A métrica é computada baseada em um somatório, que é 0(1'^) , sendo / o número de intensidades considerado nas imagens.
2. Cada termo da soma requer ao menos uma operação logaritmica e uma operação de divisão, o que implica em 0{f) operações de ponto flutuante.
lidade conjunto PRs{r, s) varia com os parâmetros de rotação, translação e escala de uma imagem em relação a outra, e o seu cálculo é O {n) , sendo n o número de pixels considerados na imagem.
Em relação à complexidade de espaço, o algoritmo é 0{p*q), sendo p o número de linhas ego número de colunas da imagem. Este dado é importante, pois dependendo do tamanho da imagem, pode ser necessário o uso de memória secundária para o processamento do algoritmo, o que implicaria em um aumento substancial no seu tempo de processamento.
3.2.3 Implementação da Informação Mútua
Para efetuarmos o cálculo da informação mútua, é necessário conhecer as probabilida- des Pfí(r), Ps{s) e PRsir,s) da Equação 3.8. O cálculo dessas probabilidades pode ser mais facilmente obtido pelo método de estimativa da densidade dos pixels através de his- tograma, bem abordado em [Egnal, 2000], e que é utilizada neste trabalho. Os seguintes procedimentos são executados para melhorar a eficiência do cálculo da informação mútua entre duas imagens, baseados em [Machado, 1999]:
1. Selecionar a região da imagem a ser utilizada para o cálculo da informação mútua, que deve ser de no mínimo 5x5 pixels. A dimensão da região tomada é um parâmetro que pode ser ajustado com base em resultados experimentais. A escolha de qual dimensão usar é um compromisso entre a robustez estatística dos histogramas e a complexidade de custo do algoritmo. Para que os resultados obtidos tenham maior acurácia, mesmo com perda de eficiência, a região utilizada neste trabalho é da imagem completa.
complexidade da métrica continua sendo 0{f), porém cada termo requer apenas uma multiplicação simples e duas subtrações.
3. LUTprob e LUTlog são as tabelas auxiliares {lookup tables):
LUTlog[i\ = log {i/n), LUTprob[Í] = i/n (3.9)
Que são são calculadas uma única vez, a um custo extra de memória que éO{p*q) no número de linhas e colunas da imagem, o que é viável se considerarmos o ganho de eficiência global devido a este artifício.
O Algoritmo 2 descreve o cálculo da informação mútua IM em cada passo do processo de registro. R e S são as imagens de referência e a ser corrigida, respectivamente. A matriz auxiliar armazena o histograma conjunto de R e S, que é inicializada com valores nulos antes que a função principal do algoritmo seja executada, assim como os vetores auxiliares Hr e i/s, com os histogramas dos valores de r e 5 das respectivas imagens.
Algoritmo 2 Implementação do Cálculo da Informação Mútua Entrãdã: Imagem de referência R. e imagem a ser registrada S,
Saída: Valor da informação mútua entre as duas imagens, Início
{ Inicializa os histogramas } Para < = O Até / - 1 Faça
Para i = O Até l - 1 Faça Hr[Í] <- O
Hsi'i] O Híislhj] ^ O { Computa os histogramas } Para i = O Até n - 1 Faça
HrM ^ HrIt] + 1; Hs{s] -í/sN +
HRs[r,s]^ HRs[r,s] + l-,
{ Computa a informação mútua para correção geométrica} Para i = O Até / - 1 Faça
Para j = O Até / - 1 Faça Se Hfís[i,j] 7^ O
IM <r- IM + LUTprob[Hiis[i,j]]*
{LUTlog[HRs[iJ]] ' LUTlog[HR[i]] - LUTlog[Hs[j]]y, { Computa a informação mútua para correção radiométrica)
Para i = O Até / - 1 Faça Para j = O Até / — 1 Faça
Se Hnslhj] O E '< = j
IM -í- IM + LUTprob[Hits[i,j]]*
{LUTlog[Híis[i,j]] - LUTlog{Hii[i]] - LUTlog[Hs[j]])]
3.3 As Funções de Transformação Geométrica e Radio-
métrica
Duas funções de transformação são utilizadas neste trabalho, uma aplicada à correção geométrica (Apêndice B), e outra aplicada à normalização radiométrica da imagem a ser registrada S, em relação à imagem de referência R. Nesta seção, cada uma delas será discutida de forma resumida e direcionada aos objetivos deste trabalho.
3.3.1 A Função de Transformação Geométrica
A transformação geométrica é uma função T{x,y) que mapeia os pontos {x,y) da imagem a ser registrada nos pontos {x',y') na imagem de referência, conforme a Equação B 2 do Apêndice B. O tipo de transformação indicada para o registro de imagens de sensoriamento remoto, utilizando informação mútua, é a transformação de corpo rígido, devido principalmente às questões de eficiência do algoritmo, como visto anteriormente. Neste trabalho utiliza-se a transformação afim genérica, devido às seguintes características da imagem:
• Comumente possuem distorções rígidas, com ângulos de rotação inferiores a 60°, translação menor que 20% da imagem, e fator de escala entre 0.7 e 1.2.
• As distorções devido ao cisalhamento podem ser compensadas pelos fatores de escala distintos para cada direção x e y da. imagem.
• O tamanho das imagens tornaria o algoritmo ineficiente para transformações não rígidas, pois demandam uma quantidade maior de cálculos.
em linhas retas, sendo portanto comumente utilizadas onde é suficiente o casamento de duas imagens geradas em uma cena de um mesmo ângulo de visão, mas de posições diferentes. Na transformação afim genérica, ângulos e comprimentos não são mais preservados, somente linhas paralelas continuam paralelas. Esta transformação leva em consideração a distorção de cisalhamento, que pode atuar tanto ao longo da direção x, quanto ao longo da direção y, diferenças de escala nas direções xey,e pode descrever distorções espacias como inclinações e mudanças nas proporções da imagem {aspect ratio). A função de transformação afim genérica em 2D é dada por [Machado, 1999]:
X2 yi
a b
c d yi +
e /
(3.10)
que possui seis parâmetros, sendo dois envolvendo a rotação 0, dois para translação e dois para escala, que são tratados aqui, respectivamente, como r^, Ty, t^, ty, e^, ey, conforme Apêndice B.
3.3.2 A Função de Transformação Radiométrica
A Figura 3.3 ilustra a situação típica encontrada quando um sistema sensor grava a energia solar refletida por um alvo na superfície. A atmosfera afeta a radiância de qualquer alvo disposto na superfície de duas maneiras paradoxais. Primeiro, ela atenua a energia que chega à superfície, e que será refletida pelos objetos. Em seguida, a atmosfera atua como um refletor, adicionando uma radiância extra na trajetória que leva ao sensor, provocada por efeito de espalhamento [APFSR, 2000].
FiEura 3.3: Ilustração dos contótos radiométricos básicos, adaptada (tSÍcco and Verri, 1998| e |Lillesand and Kiefer, 1987|.
Ao expressar esses dois efeitos atmosféricos matematicamente, a radiância total gra- vada pelo sistema sensor pode ser relacionada à refleetáncia do objeto na superfície e à irradiâucia, através da seguinte equação |Lillesand and Kiefer, 1987|:
Sendo Ltot a radiância total medida pelo sensor, T a transmitância atmosférica, p a reflectância do objeto, E a energia incidente sem a presença da atmosfera, e Lp a radiância do trajeto a partir da atmosfera (e não do objeto).
Reescrevendo a Equação 3.11 temos:
L = Kip + h.2 (3.12)
Onde L é a radiância detectada pelo sensor, é a reflectância do objeto, A'i é a constante que inclui a irradiação solar, radiância perdida por reflexão e absorção, e transmissão atmosférica, e K2 é relativo à radiância do espalhamento atmosférico. Esta forma é apresentada em [Schott et al., 1988] como uma relação viável para condições em que a mudança do ângulo de visada seja relativamente estreita, como no caso do Landsat-TM.
Além disso, para muitos sensores a radiância quantizada para o intervalo 0-255, ou DN {Digital Number), em cada banda é uma função linear simples da radiância alcançada pelo sensor. Este é o caso dos sensores do Landsat-TM [Maxkham and Barker, 1987], dado por:
ON = K3L + K4 (3.13)
eletrônicos [Schott et al., 1988]. Combinando 3.12 e 3.13, nas imagens R e 5 temos:
DNR = turPR + DNs = "ms Ps + bs
Onde DNr e DNs se referem aos valores dos pixels das imagens, mit,ms,bR e bs são constantes. Para regiões nas duas imagens, que correspondam a regiões da cena que não sofreram alterações, sejam naturais ou pela ação humana, podemos considerar que pr = ps, e os valores dos DN's dos pixels da imagem 5 podem ser transformados ao seu equivalente na imagem R, ou seja, podem ser normalizados, utilizando-se a Equação 3.14, de acordo com:
^ ^dNS + bR- —bs (3.15) ^ ms
Que pode ser simplificada por:
G{DNs) = P® * DNs + of (3.16)
Sendo G a função de transformação radiométrica aplicada na normalização, 5a (gain) o ganho e of {offset) um valor de compensação fixo, aplicados a cada pixel.
3.3.3 Análise de Complexidade
1. A complexidade de ambas as transformações, geométrica e radiométrica, são lineares, no sentido em que mapeiam os pontos pixel a pixel, que é 0{n), sendo n o número de pixels considerados na imagem.
2. Cada termo da transformação geométrica requer quatro operações de multiplicação e duas de soma, e da transformação radiométrica requer uma operação de multiplicação e uma de soma, o que implica em 0{n) operações de ponto flutuante.
3.4 Otimização na Busca da Transformação
3.4.1 Critério do Registro
Considera-se, para esta análise, que a é o conjunto de parâmetros que registram a imagem, dados por a = {r., r„í., e., e„^a, o/}, sendo estes os parâmetros de rotação, translação, escala, ganho e compensação, como vistos anteriormente, aplicados à imagem S a partir de uma transformação genérica T(a), com .base na máxima informação mútua entre as imagens R e 5. Tem-se, então, que:
IMrsÍO^) = Y1 (pR,a(r).ka(s)) (r,s)
o critério de otimização dos parâmetros Q*, que levam ao registro da imagem e são alcan- çados quando a informação mútua entre as imagens é máxima, é dado por:
3.4.2 A Busca Utilizando o Método de Powell
Se todas as possibilidades de valores dos parâmetros fossem verificados, a busca dos parâmetros da transformação ótima, aplicada ao registro, seria inviável sob o pon- to de vista da eficiência computacional do algoritmo. Utiliza-se, então, o Método de Powell [Press et al., 1992], que requer apenas a avaliação da função T{a), diferente de [Viola, 1995], onde é utilizado o gradiente da derivada da função. O método faz a busca dos mínimos de N dimensões de T{a) através de sucessivas minimizações de uma dimensão por vez ao longo de um conjunto de M direções diferentes, iniciando sempre a partir do mínimo encontrado na direção anterior, através de um método de minimização unidimen- sional, como o Método de Brent [Press et al., 1992], A Figura 3.4 demonstra um exemplo de uma função fix,y) de duas dimensões.
Figura 3.4; Método de Powell: O primeiro passo desloca a função na direção x e y ao ponto P, e a minimização continua a partir deste. A resultante r se aproxima, a cada iteração, do mínimo da fimção (adaptada de [Press et al., 1992|).
Isto implica em uma pequena alteração nas Equações 3.17 e 3.18, onde o registro, agora, é alcançado quando os mínimos da função T(a) são obtidos, mantendo a premissa
básica de que isto ocorre na máxima informação mútua entre as duas imagens, ficando então:
IMrsÍoc) = - IZ ( p^^^[r).PsAs)) (t,s)
a* = arg minaiMits(a) (3.20)
Se todas as direções do conjunto forem conjugadas umas às outras, com respeito à função a ser minimizada, como é o caso aqui apresentaxio, a otimização de uma única direção pode prejudicar nas próximas direções e fa^er com que, erroneamente, seja necessário apenas uma única iteração em todas as direções para encontrar o mínimo (possivelmente local) da função. O Método de Powell incorpora, então, um esquema para atualizar o conjunto de direções, assim como prosseguir com a otimização e construí-lo iterativamente como um conjunto de direções conjugadas.
Este conjunto é iniciado com um vetor base em cada dimensão. Após cada iteração, na qual todas as direções do conjunto são otimizadas, um novo vetor de direção é construído a partir da distância total percorrida no espaço de parâmetros. Outro processo de minimização é executado ao longo desta nova direção, que é, então, anexada ao conjunto de direções, enquanto a direção inicial do conjunto é abandonada.
o vetor base após todas as N iterações do procedimento. É preferível, então, abrir mão da convergência quadrática em favor de um esquema mais heurístico que tenta encontrar uma boa direção ao longo de vales estreitos, em lugar de obrigatoriamente N direções conjugadas [Press et al., 1992]. Isto envolve heurísticas para decidir, após cada iteração, qual distância movida considerar em cada iteração como sendo a nova direção, e qual direção no conjunto corrente deverá ser trocada por essa nova. A estratégia utilizada no Método de Powell consiste em descartai a melhor direção, pois seria aquela ao longo da qual T{a) teria seu maior decremento, e que provavelmente implicaria em ser a maior componente da nova direção que está sendo adicionada.
Algoritmo 3 Implementação do Algoritmo de Powell Entrada; vetor de índices a, métrica IMrs{o^) e conjunto de direções n.,
Saída: a*, Início
Salva a posição inicial ao Repita
Para i = 1 Até N Faça
Move «i-i para o valor mínimo de IMrsÍcí) ao longo de Ui e chama este ponto de «í; Unovo ^ Oín ~ 0!o;
TVoca a direção m por u^ovo no qual o maior decremento foi alcançado; Desloca a partir de na direção Unavo para obter o mínimo nesta direção; Se (máximo de iterações)
Escreva "erro: número máximo de iterações alcançados"; Sair;
Até (IMRsia) convergir)
0 Algoritmo 3 apresenta uma simplificação do método, que inicia com um conjunto de direções m para o vetor base, com i = 1,N, executa os passos do algoritmo ciclicamente, até que um número máximo de iterações seja alcançado ou ocorra a convergência do algoritmo obtendo-se a*. Para algumas situações, guardamos o conjunto de direções antigo na próxima iteração. Basicamente esta situação ocorre quando a nova direção candidata a„ - ao aparenta ser ruim ou quando o conjunto de direções antigo ainda mostra ter potencial, o que pode ser visto analisando q„ - «o e o gradiente. O Método de Powell não especifica o método de minimização unidimensional. Como dito anteriormente, optou-se por utilizar o Método de Brent para esse fim, no que consta resumidamente em [Press et al., 1992].
A eficiência da busca pode ser substancialmente melhorada com a utilização da técnica de multi-resolução [Fonseca, 1999], entretanto utilizada somente à correção geométrica da imagem, e que será objeto de pesquisa em trabalhos futuros. A técnica de multi-resolução, assim como outros métodos de otimização, podem ser encontrados no Apêndice C
3.4.3 Análise da Complexidade
1 O Algoritmo de Powell minimiza uma função linear em N dimensões de minimização, ciclicamente em i iterações. Como o Algoritmo de Brent também utiliza j iterações para minimizar uma única dimensão, temos então que, para o pior caso, o algoritmo é 0{N *i*j)-
2. Cada minimização unidimensional requer j operações de divisão e subtração, em i ciclos de busca, o que implica em 0{i * j) operações de ponto flutuante.
Capítulo 4
Implementação e Resultados
Neste capítulo apresentamos a forma como foi implementado o registro automático uti- lizando a informação mútua como métrica de similaridade, os parâmetros inicias utilizados, a forma de medição e os resultados obtidos.
4.1 O programa RABIM
4.1.1 Fluxograma e Algoritmo
Como pode ser observado no fluxograma, o programa executa o registro em duas etapas similares, porém distintas:
1. Na primeira etapa do registro é feita a correção geométrica da imagem a ser registrada S, através de transformações geométricas sucessivas, cujos índices são incrementados com base na informação mútua entre a imagem de referência Res. imagem a ser registrada transformada S', utilizando o Método de Powell para a busca otimizada dos índices para atingir o mínimo da função, o que implicaria na correção geométrica para a máxima informação mútua entre as duas imagens.
2. Na segunda etapa, uma vez corrigida geometricamente a imagem 5, produzindo uma imagem S', é feita a normalização radiométrica da imagem S' em relação à imagem R, através de transformações radiométricas sucessivas, análogo ao caso da (ítaj)a anterior. Finda esta etapa, a imagem S" fica registrada em relação à imagem R.
Algoritmo 4 Implementação do Progicima RABIM (Registro Automático Baseado em Informação Mútua).
Entrada: Imagem de referência R e imagem a ser registrada S, Saída: Imagem Registrada 5",
Início
{ Inicializa parâmetros }
Inicializa aoto = {índices da transformação geométrica '/"(«ovo)}: Inicializa anod = [ga, of} {índices da transformação radiométrica T{aiiad))'^
Inicializa o conjunto de direções Uj para o Método de Powell; { Faz a correção geométrica }
Repita
S' ^ TiaGec){S)
IMRS'iaCeo) < Z)(r,5') PrS' s') log aoeo arg minaa^JMits'{aaeo) Se (máximo de iterações)
Escreva "erro: número máximo de iterjições alcançados"; Sair;
Até {IMits'(aGeo) convergir) { Faz a correção radiométrica } Repita
S" ^ T{aRaé)iS')
IMRS"{oiRad) < J2{r,s") PRS"{r, s") log OíRad ^ arg minan^JMRS"(a[iad)
Se (máximo de iterações)
Escreva "erro: número máximo de iterações alcançados": Sair;
Pode-se pensar, inicialmente, em aplicar ambas as transformações geométrica c radiométrica - à imagem S, considerando-as uma única função de transformação, c utilizar o Método de Powell para minimizá-la, encontrando os índices da função para o registro. Isto, entretanto, ainda não é possível, conforme mostrado no Problema da Correspondência (Ekjuação 3.1), pois existe uma interdependência entre estas duas funções, de tal forma que a primeira depende da segunda, pois a informação mútua utili/a os valores dos pixels como probabilidades, e estes devem permanecer os mesmos at.ê (juc se determinem os índices da transformação geométrica, e a segunda depende da primeira, pois não seria possível aplicar a normalização radiométrica em um pixel que não esteja na mesma posição nas duas imagens.
Observe que no Algoritmo 2 existem duas formas de cálculo para a informação mútua. A primeira aplicada à métrica de similaridade para a correção geométrica, largaiiunitc utilizada para imagens médicas, como visto no Capítulo 2. A segunda é apli(;ada à métrica de similaridade para a normalização radiométrica, com uma pequena alteração qu<í a torna capaz de fixar as posições dos valores dos pixels utilizados nas probabilidades. Pode- se, então, variar estes valores através da transformação radiométrica. Após revisão da literatura pertinente, pode-se dizer que esta é a primeira vez em que esta técnica é aplicada na normalização radiométrica de imagens de satélite em sensoriamento remoto.
4.1.2 Parâmetros Iniciais
para a correção geométrica das imagens, os primeiros seis parâmetros da Tabela 1.1, (luc são também utilizados neste trabalho. Os outros dois, referentes aos índices da transforma- ção radiométrica, foram obtidos experimentalmente, como mostrado a seguir. O conjunto de direções iniciais é uma matriz identidade raxn, sendo n o número de índices a serem otimizados envolvidos, que neste trabalho é uma matriz 8x8 [Press et al., 1992|.
farãmetro Valor Rotação (ri, ry)
Translação itx,ty) Escala (ej-.e^)
Ganho (g4 Compensação {Of)
5 graus 5 pixels
1.0 1.0 0.0 pixels
Tabela 4.1: Valores iniciais dos índices das transformações geométrica e radiométrica.
Em tomo destes valores, alguns resultados foram gerados utilizando as imagens da cena 231_062, banda-5, de 1995 (803x768 pixels) como imagem de referência e 1999 (8'l()x768 pixels) como imagem a ser registrada (Figura 4.2), ambas reduzidas de seu tamanho ori- ginal través do aplicativo xview. Para cada experimento, apenas um parâmetro é variado, mantendo-se fixos os demais conforme a Tabela 4.1, obtendo-se os dados na Tabela 4.2.
Estes dados podem ser interpretados através das Figuras 4.3, 4.1, 1.5, 4.6 c 4.7 (pie apresentam gráficos contendo quatro características principais: erro geométrico, erro ra- diométrico, informação mútua e tempo total de processamento. Os experiment,os foram executados em uma máquina Sun UltraSparc-5 na plataforma Solaris. O tempo do proces- samento foi medido com a função difftime do G I I , incluindo tempo de CPU, usuário c acesso a memória. Os erros foram calculados de acordo com o especificado na Seção 4.3.1.
Parâmetro Valor Erro Geo(Pix) Erro Rad(DN) Inf Mutua Tempo (min) Rotação (Graus) r 5° r 10° 12° 0.935 0.935 0.935 2.021 5.000 2.990 2.996 2.986 2.981 3.005 0.257 0.256 0.257 0.256 0.257 21.32 21.05 21.75 24.63 19.88 TYanslação (Pixels) 1 5 10 15 20 0.926 0.935 0.913 4.103 5.000 2.993 2.996 2.992 3.063 3.215 0.257 0.256 0.257 0.134 0.097 20.52 21.05 39.45 23.47 16.12 Escala Ü.6 0.8 1.0 1.2 1.4 0.935 0.913 0.935 5.000 5.000 2.994 2.995 2.996 3.816 5.077 0.257 0.257 0.256 0.030 0.039 23.80 35.82 21.05 09.30 18.10 Ganho U.l 0.6 1.0 1.4 2.0 0.935 0.935 0.935 0.935 0.935 2.996 3.004 2.996 2.997 2.996 0.256 0.256 0.256 0.256 0.256 21.30 20.62 21.05 20.87 21.12 Compensação (Pixels) Ü.O 0.5 1.0 1.5 2.0 0.935 0.935 0.935 0.935 0.935 2.996 2.993 3.001 5.000 5.000 0.256 0.256 0.245 0.005 0.005 21.05 22.02 20.97 20.45 20.18 Tabela 4.2: Valores experimentais obtidos para definir o vetor do índices inicial.
Rotação X Brro Oeoeâtricoe R adionétrico
lrroQ«o{Pix) IrroRad(DNa)
QrauB
40 35 30 25 t 20 t!
15 10 5 O
0 2 4 6 8 10 12 14 Qraua
(b)
Figura 4.3: (a) erros geométrico (em pixels) e radiométrico (em DN) c (h) inforiiiacíão mútua (xlO) e tempo de processamento em minutos, para diferentes valores iniciais de rotação.
(a)
RotaçAo X InforwçAo NAtua «T mmpo
Tranalaçlo x Brro OMMiétrlooa B «dioiDétrlco
(a)
Tranalaçlo x Inforaaçlo Mútua «T —ir"
(b)
0.6 o.e
(a)
Bacala x InforwçAo Mútua «T eEço
Bacala
(b)
3 -
KrroR«d(DN«)
0.5
(a)
Qanbox I nfonoaçâo «T —>
15 -
10 -
Infltut(xlO) TMf>o(Bin)
Qanbo
(b)
5 -
« 1
u 3
1 1.5 2 2.5 PiX*l«
(a)
Cos^ttnsaçlo x InforwçAo Mútua «T
Pixal
(b)
dos tipos de imagens utilizadas, bem como das deformações que possuem. Para imagens de satélite da Região Amazônica, contudo, os mesmos foram satisfatórios, como pode ser visto na Seção 4.2.
4.1.3 Análise da Complexidade
1. O Programa utiliza o Método de Powell em m linhas de minimização, ciclicament (> ciii i*j iterações (vide Subseção 3.4.3). Cada ciclo tem o custo 0{n) das transformações e do cálculo da informação mútua. Considerando p = m * i * j o fator relativo ao custo do Método de Powell, temos que o custo total do programa é 0{n » />), sendo n o número de pixels considerados na imagem.
2. Cada ciclo requer uma determinada quantidade de operações de ponto flut uante, como visto nas Subseções 3.2.2, 3.3.3 e 3.4.3, tomando o tempo de execução ainda maior.
3. O número de iterações depende de qq, o conjunto de pontos iniciais utilizados. A convergência dos índices das transformações geométrica e radiométrica convergem mais rapidamente se utilizadas separadamente, o que já é uma característica do programa devido à necessidade do cálculo diferenciado da infomiação mútua para os dois casos.
4.2 Resultados Obtidos
4.2.1 Experimento 1
O primeiro experimento utiliza o programa RABIM nas imagens de floresta, banda 5 do TM-Landsat, obtidas em datas distintas, conforme a Tabela 4.3:
Imagem Uata de Aquisição Uíscnminaçào TM925AM TM945AM TM955AM TM965AM TM975AM 07/06/1992 15/07/1994 03/08/1995 20/07/1996 07/07/1997
Imagem a ser registrada 1 Imagem de referência 1 e 3
Imagem de referência 2 Imagem a ser registrada 3 Imagem a ser registrada 2 Tabela 4.3: Imagens utilizadas no experimento 1.
Os experimentos foram executadas utilizando as imagens citadas, com base nas seguin- tes informações:
• Executado em uma máquina Pentium III 800MHz na plataforma Linux.
• As imagens foram escolhidas em função de sua utilização no trabalho (1(> [Fonseca, 1999], para permitirem uma comparc^ão dos resultados obtidos.
• Imagens gentilmente cedidas pela Dra Leila Fonseca do Instituto Nacional de Pes- quisas Espaciais.
Os experimentos foram executados utilizando as mesmas imagens para referência c registro como em [Fonseca, 1999], obtendo os seguintes resultados, divididos no ciue se refere à correção geométrica e radiométrica, apresentadas nas Tabelas 1.-1 e 4.5.
Final -0.352 0.028 0.983 1.061 7.619 5.042 'l'M955AM TM975AM Inicial
Final
-Ü.Ü87 0.002 o
c o c o 0 0 1.000 0.999 1.000 1.001 5.000 45.430 5.000 15.930 'l'M945AM 'i'M965AM Inicial
Final -U.Ü87 0.002 0.087 0.000 I.ÜOÜ 1.001 l.UUU 0.999 5.UUU 71.322 5.000 2.214 Tabela 4.4: Resultados dos índices da transformação geométrica, divididas em rotação (tj e Tp) , escala (Ci e e,,) e translação (íi e tp).
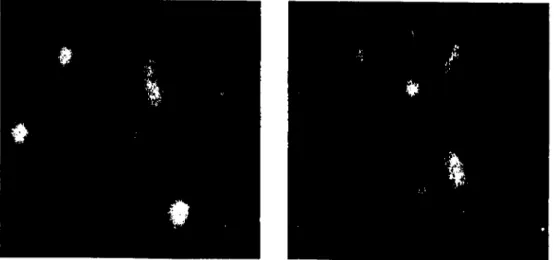
ê
(a) TM945AM (b) TM925AM
(c) TM925AM Registrada (insucesso)
Imagem Estado Banda ga oj 1M945AM lIViy25AM inicial
Final
5 5
I.ÜOO 0.577
Ü.OOO -0.032 1 My55AM 'l'M975AM inicial
Final
5 5
I.ÜOO 1.000
Ü.OOO 0.000 1 My45AM IMübôAM inicial
Final
5 5
l.üüü 0.998
O.üüü 0.000 Tabela 4.5: Resultados dos índices da transformação radiométrica.
(c) TM965AM Registrada