DESENVOLVIMENTO DE UMA INTERFACE
HUMANO-ROBÔ UTILIZANDO VISO
COMPUTACIONAL E SISTEMAS A EVENTOS
DISCRETOS
Instituto de Ciênias Exatas
Programa de Pós-Graduação em Ciênia da Computação
DESENVOLVIMENTO DE UMA INTERFACE
HUMANO-ROBÔ UTILIZANDO VISO
COMPUTACIONAL E SISTEMAS A EVENTOS
DISCRETOS
Dissertação apresentada ao Curso de
Pós-Graduação em Ciênia da Computação da
Universidade Federal de MinasGerais omo
requisito parialparaaobtenção dograude
Mestre emCiênia da Computação.
RAONI MAÍRA RESENDE
Este trabalho apresenta umanova abordagem para o desenvolvimento de interfaes
vi-suaishumano-rob baseadas em visãoomputaional. Ométodo proposto sebaseia na
utilização de uma linguagem omposta por gestos simples, onde um gesto isolado não
possui qualquer signiado, mas uma palavra, omposta por uma seqüênia de gestos
realizados na ordem orreta, gera umaresposta. Dessamaneira, pode serdenida uma
gramátia e assoiada uma ação do rob a ada uma dessas palavras, permitindo ao
operadorhumanoomandar o robde maneiraintuitiva.
Considerando apenas gestos simples, o sistema de visão omputaional privilegia a
robustez sebaseando emténias qualitativas, menos preisas porém mais robustas. A
saída do sistemade visão omputaionalé proessada por um sistemaa eventos
disre-tos estoástio que deteta a exeução de omandos. O reonheimento é realizado de
maneiraontínua, sendoo iníioe o mdeada gesto identiados impliitamente pelo
modelo. Foram utilizados doistiposde sistemasa eventosdisretos: adeiasde Markov
e Modelos Oultos de Markov (MOMs,do inglês, Hidden Markov Models). Para ambos
ostiposfoidesenvolvidaumametodologia para a onstruçãoautomátia do modelo.
Ostestesrealizadosomprovamaeáiadométodomesmoemambientesomplexos
eomoexeutordosgestossemovendo. Foiomprovadaarobustezdométodoeabaixa
inidênia defalsospositivos,prinipalmente para osMOMs. A utilização de MOMsno
ontextopropostoapresentou desempenho superiorao dasadeiasde Markov. Também
foiidentiada aimportâniadaesolhaorretadosomandos dagramátia,para evitar
umadeterioração signiativa dataxade reonheimento àmedida queaquantidade de
Thisworkpresentsaomputervisionhuman-robotinterfaebasedongesturereognition.
A grammaromposed ofstrings ofsimple gesturesis dened sothatan isolatedgesture
hasnomeaning to the system, andonly asequene ofgestures performedintheorret
order, aording to the grammar, will issue a ommand to the robot. Eah of these
words, made of gestures, an be assoiated to a ommand, whih will be issued to the
roboteverytimeit'sreognized. Through theuseofthis interfae, ahumanoperator an
ontrol arobot ina natural andintuitive way.
Sine only simple gestures are onsidered, the omputer vision system is based on
qualitative tehniques that exhibits robustness properties. The output of theomputer
vision systemispassed on to a stohastidisrete event systemwhih is responsible for
theommands reognition. Continuousgesture reognition is performed and themodel
impliitly identies the beginning and the end of eah gesture. Two types of disrete
event systemswereemployed: Markovhainsand Hidden MarkovModels(HMM). The
models werebuilt automatially for both ofthese types.
Experimentalresultsshowsthattheproposedmethodology yieldsrobustreognition
withlowourreneoffalsepositiveseveninomplexbakgroundsandwiththeoperator
moving. The HMMs outperformed the Markov hains in the proposed methodology
ontext. The ommands must be orretly hosen to avoid serious degradation of the
Agradeço primeiramente aosmeus pais,Maria JoséMendes eHeliéser JoséResende e à
minhaavó AnaMendesFerreira, poiseles sãoosresponsáveispor todaaaminhadaaté
esse ponto.
ÀminhaesposaDaniellepeloompanheirismoeàminhalhaFernandapelaalegriae
portermeemprestadoosbrinquedosparaqueeupudesserealizardiversosexperimentos.
AgradeçoaomeuorientadorGuilhermePereirapelainndávelompreensão,
disponi-bilidadee paiênia. Ao LuizChaimowiz peloaprendizadoe orientaçãono projeto
ori-entado,essenialnessa aminhada. Ao Máriopeladisussãoiniial, responsávelpor que
eumeenveredasseporessaárea,epelosprimeirospassosnomestrado. AoCareronipor
sempreterdespendidotodaaatençãoneessária,sendotãoriteriosoquanto neessário.
Agradeço à ATAN por todo oapoioduranteosmomentos emquemaispreisei.
Agradeço tambémàsdemais pessoas queforamtão importantes na minhaformação
aadêmia, prossional e pessoal, em ordem ronológia, Renato Mesquita, Ana Liddy,
MareloSzuter,GuilhermeSalles,LeandroBarbosa,EbenezerOliveiraetodososdemais
olegasda ATAN omquem tive aoportunidade de trabalhar.
Aos olegas do VERLab, prinipalmente ao Pedro Shiroma, pela disponibilidade e
introdução ao Pioneer.
1 Introdução 1
1.1 Contribuições . . . 3
1.2 Organização da dissertação . . . 3
2 Revisão Bibliográa 4 3 Coneitos Preliminares 11 3.1 Sistemasa EventosDisretos . . . 11
3.2 Cadeias deMarkov . . . 12
3.3 ModelosOultos de Markov . . . 14
3.3.1 Motivação . . . 15
3.3.2 Denição . . . 16
3.3.3 Os três problemasbásios dosMOMs . . . 18
3.3.4 Solução parao Problema1 . . . 19
3.3.5 Solução parao Problema2 . . . 22
3.3.6 Solução parao Problema3 . . . 23
4 Metodologia 26 4.1 Sistema deVisão Computaional . . . 26
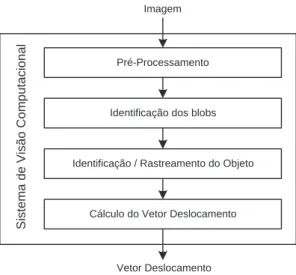
4.1.1 Pré-Proessamento . . . 27
4.1.2 Identiaçãodosblobs . . . 28
4.1.3 Identiação/Rastreamento doobjeto . . . 28
4.1.4 Cálulo do vetordesloamento . . . 29
4.1.5 Consideraçõessobre aordem deomplexidade . . . 29
4.2 Máquina de EstadosFinitos . . . 29
4.3 Cadeias deMarkov . . . 31
4.4 ModelosOultos de Markov . . . 33
4.4.1 Formulação . . . 34
4.4.2 Treinamento e Preparação . . . 35
4.4.3 Proessamento . . . 36
4.4.4 Treinamento do MOM omo Comando Completo. . . 37
4.4.5 Treinamento Independente de CadaGesto . . . 38
5 Resultados 45 5.1 AmbienteeImplementação . . . 45
5.2 Avaliação . . . 46
5.3 Cadeias deMarkov . . . 49
5.4 MOMs . . . 53
5.4.1 Treinamento . . . 53
5.4.2 Reonheimento ontínuo . . . 55
5.5 Análise rítiadosresultados . . . 57
6 Conlusões e Trabalhos Futuros 59
3.1 Exemplo de autmato om três estados onde
X
=
{
0,
1,
2
}
,E
=
{
a, b, c
}
,q
0
= 0
(marado pela seta)eXm
=
{
0,
2
}
. . . 123.2 CadeiadeMarkov omquatro estados(
0
a3
). . . 133.3 Trêspossíveismodelos deMarkovparaoexperimentodo lançamentode uma moeda. (a)Modelode umamoeda. (b)Modelode duasmoedas. ()Modelo detrês moedas. . . 16
4.1 Diagramade bloosdo sistemautilizado.. . . 26
4.2 Sistemade Visão Computaional - diagramade bloos. . . 27
4.3 MEFquereonhee o gestodireita (d). . . 30
4.4 MEFquereonhee a seqüêniade gestosdireita (d) epara ima ().. . . 30
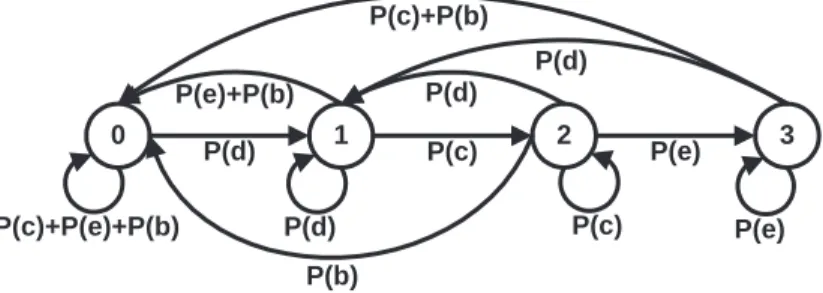
4.5 MEFquereonhee a seqüêniadireita (d), para ima ()e esquerda (e). . . 31
4.6 CadeiadeMarkovquereonheea seqüêniadireita,para ima,esquerda. A probabilidadedeadatransição
a
ij
éaluladaapartirdasprobabilidadesde ada gesto. . . 324.7 Classiação dos ângulos de desloamento em intervalos. Por exemplo, os ângulosentre
π/8
e3π/8
orrespondemao intervalo1. . . 354.8 Topologia esquerdaparadireita semomissões(left right withno skips).. . . . 35
4.9 MOMdotipoesquerdaparadireitasemomissões(leftright withno skips)de doisestados. . . 38
4.10 MOM om seis estados, resultante da união dos três MOMs de dois estados treinados. . . 41
5.1 Seqüênia de gestos para ima, direita, para baixo. A trajetória perorrida peloobjetorastreado é apresentada naorbrana. . . 47
4.1 Exemplode omportamento do buer onsiderando umtamanho mínimo de
seqüênia de 4 e máximo de 6. Para ada quadro é apresentado o símbolo
identiado,oonteúdodo buer, oonjuntode seqüêniasproessadaspelo
MOMe sehouve ou não algumomando identiado nesse quadro. . . 37
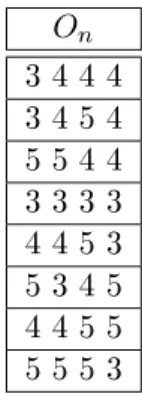
4.2 Seqüênias de observações utilizadas no treinamento do MOM para o
reo-nheimento dogesto direita.. . . 39
4.3 Seqüêniasde observaçõesutilizadasno treinamento do MOM para
reonhe-imento dogesto para ima. . . 40
4.4 Seqüêniasde observaçõesutilizadasno treinamento do MOM para
reonhe-imento dogesto esquerda. . . 41
4.5 Símbolosque podemsergerados por ada estado,deaordo oma matriz
B
apóso treinamento. . . 434.6 Seqüênias de observações utilizadas na validação do MOM onstruído para
reonheimento doomandodireita,para ima,esquerda eprobabilidadesde
adaumaserreonheidautilizandotantoametodologiaproposta(penúltima
oluna)quanto atradiional(última oluna). Asseqüêniasquerepresentam
esseomando, eportanto deveriam serreonheidas, sãoexibidas emnegrito. 44
5.1 Conjuntosde dadosutilizados nosexperimentos. . . 47
5.2 Exemplo de probabilidades de ada gesto a partir do setor no qual o vetor
desloamento foilassiado. Probabilidadesobtidas parao onjunto
NUM-REPpormeio de inferênia bayesiana. . . 49
5.3 Taxasde reonheimento dasadeiasdeMarkovparaadaumdosonjuntos
de testes onsiderando diversos limiares para a seqüênia de gestos direita,
para ima e esquerda. Foram utilizados diversoslimiares de reonheimento
refereàsiniiais dosgestos. . . 51
5.5 Resultados do reonheimento para múltiplos omandos utilizando adeias
de Markov. Para ada onjunto de omandos utilizado são apresentados os
resultados paraada umdosonjuntos de treinamento.. . . 52
5.6 Taxadereonheimento deaordooma quantidade deelementos utilizados
paratreinamentoutilizandooonjuntoNUMREP.Paraadatamanhodo
on-juntodetreinamentosãoapresentadosotamanhodoonjuntodevalidação,a
taxade reonheimento TR(Equação (5.2))e oaumento perentualrelativo
à linha anterior. O proedimento de treinamento e validação foi exeutado
20 e 30 vezes para ada tamanho de onjunto de treinamento, sendo que as
seqüêniasutilizadasparatreinamentoforamesolhidasaleatoriamentesendo
asdemaisutilizadasparavalidação. . . 54
5.7 Resultados do reonheimento para múltiplos omandos utilizando MOMs.
Para ada onjunto de omandos utilizado são apresentados os resultados
paraada umdosonjuntos de treinamento. . . 56
5.8 Comparação dasduasmetologiasutilizadas, baseadas em adeiasde Markov
Γ
função deestadosativos.a
ij
probabilidade de atingiroestadoj
oriundo do estadoi
.αt(i)
probabilidade de observaçãodaseqüênia parialO
=
O
0
O
1
· · ·
Ot
atéoinstantet
e doestadoi
no instantet
,dado o modeloλ
.β
t
(i)
probabilidade de observaçãodaseqüênia parial det
+ 1
aT
−
1
dado o estadoi
noinstantet
eo modeloλ
.bj
(k)
probabilidade de seobservar o símbolov
k
noestadoj
.N
real
número de omandos quedeveriam tersidoidentiados(ground truth).γ
t
(i)
probabilidade de se estar no estadoi
no instantet
dadas a seqüênia de obser-vaçõesO
eo modeloλ
.q
0
estadoiniial.λ
onjunto ompleto de parâmetros de umMOM.X
m
onjunto de estadosmarados ounais.q
k
estadono instantek
.v
k
k-ésimosímbolo doonjunto de símbolos distintosV
.V
onjunto de símbolosdistintosobserváveisdo modelo.ξt(i, j)
probabilidadedeseestarnoestadoi
noinstantet
enoestadoj
noinstantet
+ 1
, dadoo modeloe a seqüêniade observações.B
matrizda distribuiçãoprobabilístia de observação dossímbolos nosestados.E
onjunto de eventos.f
função detransição.h
altura daimagem empixels.T
omprimento daseqüênia de observações.T
avg
tamanhomédio dasseqüênias utilizadaspara treinaro modelo.T
max
tamanhoda maiorseqüênia utilizada paratreinaro modelo.Tmin
tamanhoda menor seqüênia utilizada para treinaromodelo.w
largura daimagem empixels.X
onjunto de estados.MOMs ModelosOultos de Markov.
AEFD autmato deestados nitosdeterminístio.
D número de erros dedeleção.
GSMS Generalized Semi-Markov Sheme.
H número de omandos identiadosorretamente.
I número de erros deinserção.
MEF Máquinade Estados Finitos.
S número de erros desubstituição.
SED Sistemaa EventosDisretos.
Introdução
A Robótia pessoal e de serviço é atualmente uma das áreas de pesquisa mais ativas
em robótia, om grande potenial de resimento de aordo om a aeitação da
so-iedade. Robsde serviço interagemdiretamente om aspessoas, tornando a existênia
de interfaes naturais e fáeis de usar fundamental. O foo de grande parte dos
traba-lhospassadosé predominantemente navegaçãoe manipulação epouo foio interesseem
sistemas robótios equipados om interfaes exíveis, que permitam ao usuário
ontro-lar o rob por meios naturais. Um rob om interfae natural possibilitaria toda uma
nova gama de apliações, omo por exemplo um rob de limpeza, guiado para limpar
loais espeíos e pegar o lixo [Waldherr etal., 2000 ℄. Diferentemente de robs
indus-triais, que são enontrados prinipalmente em linhas de produção, os robs de serviço
sãoutilizadospelasmassas,milhõesde usuáriosemtodosostiposde loais,do hospital
à asa, dorestaurante ao esritório[Pransky,1996 ℄. Diversosespeialistas apontam que
emumfuturopróximo, entreinoe dezanos, robsde serviçosetornarão ummerado
multibilionário [Bishop,2006 ℄.
Autilizaçãoresentederobsnasmaisdiversasapliações,algumasdestasexigindo
alta interatividade, demanda interfaesintuitivas om o homem,uma vez que estas
po-demreduzirorisodeerroemapliaçõesrítias, onsiderandoumainterfaenatural de
aordoomosreexosondiionados doserhumano. Umexemplodissoseriamosrobs
irúrgios[Pransky,1996 ℄.
Ariaçãodeinterfaesnaturaishomem-robéumassuntoquedespertaadavezmais
ointeressedaomunidadeientíamundialdevidotambémàextensagamadeapliações
queelapossibilita. Entretanto podemosonsiderarqueestasaindaseenontramemseu
estágio iniial. À medida que aumenta a apaidade dos robs de realizar maistarefas
paraaomodar essaevolução [Sholtz, 2002 ℄.
Na robótia atual, prinipalmente na robótia industrial, existe poua ou nenhuma
interaçãodiretaentrehomemerob. Osrobssãoprogramadosparadeterminada
ativi-dade e se limitam a exeutar tais atividades, o que gera uma segmentação do trabalho
entrehomense robs. Essa exlusividadedehumanos ourobsaabalimitando as
apli-ações dos robs, uma vez que o uso de robs aaba se tornando viável somente em
ambientes totalmente ontrolados. As tarefas devem ser inteiramente desempenhadas
pelo rob,situaçõesemque asapaidades de deisãoeplanejamento deum supervisor
sãoneessáriasnão podemsurgiroudevemser resolvidasremotamente, devidoà
ausên-ia de interfae om o ser humano. Sistemas robótios projetados para interagir om
sereshumanos abrem um novo leque de apliações abrangendo tarefasomplexas e não
repetitivas que requerem supervisão humana e podem ser exeutadas por robs, porém
devemseroordenadaspelosoperadores(autonomia supervisionada). Taissistemas
pre-isariam permitiruma interação natural entre o robe o operador tornando ainterfae
visual fundamental. Para isso o sistema preisa ser apaz de loalizar o operador no
ambiente erastrear osseusmovimentosem tempo real.
A área de busa e resgate urbano é uma área em que humanos devem interagir
om robs e om a informação produzida por eles. Pesquisas baseadas em dados reais
apontamqueoserrosdeexeução(i.e.,ontrole dorob)sãomuitomaioresqueoserros
deintenção (i.e,onde eomoutilizar orob) [Murphye Casper,2002 ℄,oque indiaque
umainterfae natural poderia reduziroserros nessatarefa.
Além disso, interfaes baseadas em visão omputaional possuem outras apliações
menos óbvias, omo por exemplo os omputadores usáveis (wearable omputers). A
utilização desse tipo de interfae nesses dispositivos pode forneer usabilidade mesmo
quandoo usuário está emmovimento [Kölsh etal.,2004 ℄.
Este trabalho propõe umainterfae visual humano-rob baseada emvisão
omputa-ional. Aomuniaçãoéfeitaporumalinguagemompostaporgestossimples,denindo
umagramátia ondeumgestoisoladonãopossuiqualquersigniado, masumapalavra,
omposta por umaseqüênia de gestosrealizados naordem orreta, gera umaresposta.
Umaaçãodorobpodeserassoiadaaadaumadessaspalavras,permitindoaooperador
humano omandar orob de maneiraintuitiva.
Dois módulos prinipais ompõem o sistema, o de visão omputaional e o de
pro-essamento estoástio dosgestos. Busou-se a utilizaçãode métodosestoástios,uma
vez que estes forneem níveis de onança em vez de apenas suesso ou falha, o que
A interfae é baseada em algoritmos tradiionais de visão omputaional, simples e
eientes, uma vez que a tarefa aloada para o sistema de visão, da maneira que foi
formulada, pode seronsideradasimples. Sendosimples, podeser resolvidapor ténias
qualitativasquesãorobustas. Dessamaneira, omódulodevisãoomputaionalfoaem
identiar apenasasaraterístiasimportantes, neessárias paraatingiroseuobjetivo,
emvez de tentarreonstruir omundo.
Para o proessamento dos gestos foram utilizados reonheedores de linguagens
es-toástios, sendo seleionadas as adeias de Markov, por se tratarem de máquinas de
estados nitos probabilístias e Modelos Oultos de Markov(MOMs, do inglês, Hidden
MarkovModels). MOMsforamutilizadoslargamenteao longodasúltimas deádaspara
oreonheimentodepadrõeselassiaçãoeformamhojeabaseparaumagrandegama
de soluções para análise de dados e modelagem estatístia. MOMs são utilizados nas
maisdiversasapliaçõesomo,porexemplo,guiarmísseis[Niluboletal.,1998℄,predição
derisesnoOrienteMédio[Shrodt,2000℄epesquisasbiomédiasenvolvendoseqüênias
de genes[Kulpetal.,1996 , Yada eHirosawa,1996,Pedersen etal.,1996 ℄.
1.1 Contribuições
Asprinipaisontribuições destetrabalho são:
•
desenvolvimento de uma interfae visual utilizando visão omputaional baseadana utilização de sistemas a eventos disretos estoástios para o reonheimento
ontínuo de gestos;
•
desenvolvimento de uma metodologia para o proessamento estoástio de gestosutilizando tanto adeiasde Markovquanto MOMs;
•
utilizaçãodeumanovaabordagemparaoálulodaprobabilidade deumaseqüên-iade observaçõesserreonheida utilizando MOMs.
1.2 Organização da dissertação
Este trabalho está organizado da maneira que será desrita a seguir. O Capítulo 2
apresenta os trabalhos relaionados e o Capítulo 3 apresenta os oneitos neessários
para o orreto entendimento da metologia proposta, que por sua vez é apresentada no
Capítulo 4. OCapítulo 5apresenta osresultados obtidose oCapítulo6,asonlusõese
Revisão Bibliográa
Asinterfaesbaseadas emvisão omputaional(IBVC)omeçaram aserlargamente
ex-ploradas em meados da déada de noventa, quando foram desenvolvidos desde mouses
baseados em gestos [Fukumotoetal., 1994, Quek etal.,1995 ℄ até interfaes para jogos
baseadas em visão omputaional [Freeman etal.,1996℄. Devido às limitações de
pro-essamento omputaional, essas interfaes baseavam-se em ténias simples para que
pudessemresponderemtemporeal aosgestosdousuário, omohistogramas de
orienta-ção emomentos da imagem[Horn,1986℄.
Paraavaliar aqualidade e usabilidade de umaIBVCdevem seronsideradas quatro
araterístias prinipais, de aordo om Kölsh [Kölshetal.,2004 ℄: veloidade,
exati-dão, preisão e robustez. De aordo om Sheridan e Ferrell [Sheridan eFerrell, 1963℄ o
tempo delatêniamáximo entreaoorrêniadeumeventoe arespostado sistemadeve
ser de 45 ms para que o usuário não pereba nenhum atraso. A partir de 300 ms de
atraso asinterfaes passama pareer lentas, pondendo provoar osilações e resultando
numefeito onheido omo osintoma movae espere.
Asinterfaesbaseadasemgestospodemserlassiadaspordiversosparâmetros. Os
gestos a serem identiados podem ser estátios, identiados pela posição e forma, ou
dinâmios, identiados por sua trajetória. A abordagem pode ser bottom-up baseada
nasaraterístiasdebaixoníveldaimagemoutop-down omométodosdereonstrução
geométria do orpo. Oreonheimento pode aindaser realizado em três dimensões ou
simpliadamente em duasdimensões.
A maioria dossistemas que emprega a abordagem top-down utiliza ummodelo
geo-métrio doorpo humano. Partes do orposãomodeladas,porexemplo, omoilindros
[Hogg,1983 ℄esuper quadris[Horowitz ePentland, 1991 ℄,entreoutros,eosparâmetros
[Yamamoto, 1991 ℄, propagação de restrições [O'Rourke e Badler, 1980 ℄ ou análises
mo-dais [Horowitze Pentland, 1991 ℄. A reonstrução da postura do orpo humano (i.e.,
extração dos parâmetros do modelo) fornee uma grande gama de informações aso a
reonstrução tenha suesso, omo por exemplo, os ângulos das juntas. Entretanto os
algoritmosde reonstrução não sãorobustosparaimagens reais,poisestasem geralsão
muitoruidosasparapermitirumasamento fáildo modelo[Yamato etal.,1992 ℄. Além
disso, métodos baseados na deteção de arestas e formasnão sãoreomendados para a
identiaçãoerastreamento embakgrounds omplexospoissuaexatidãoédeterminada
peloontrasteexistenteentreosplanosdefundo efrontal, oque nãopode sergarantido
nesse aso[Kölsh etal., 2004 ℄.
Umexemplodeabordagemtop-down éorastreamento eidentiaçãodemovimentos
damãoemtrêsdimensões(3D)realizadoporDaviseShah[Davise Shah,1994a ℄. Amão
foimodelada por ino ilindrosque eram ajustados àfalange distal dosdedos da mão.
Atrajetóriadosilindroseraaluladanoespaço3Dpodendoserutilizadano
reonhei-mento degestos. Cominformações3Dépossívelsaberaloalizaçãoexatadosdedos,em
oordenadasdomundo,aqualquermomento. Esseonheimentopodeserexploradosem
apreoupaçãode ambigüidade,omooorreomainformação bidimensional(2D),uma
vezqueumatrajetória2Dpodeorresponderadiversastrajetórias3Ddevidoà
transfor-maçãoperspetiva. Além disso, autilização demodelos3De parâmetros de movimento
evitaaneessidade da orrespondêniado movimento paramapeararaterístias àsua
orreta trajetória 2D [Rangarajan eShah,1991 ℄. A informação 3D pode ser utilizada
pararemoveressasinertezas quesurgem em2D. Oalgoritmo implementado por Davis
eShah exigequea mãosejao objetodominantena imagemdevendo tambéminiiarem
posição pré-denida.
Entretanto, deaordoomoparadigmadavisãoqualitativapropostoporAloimonos
[Aloimonos,1990 ℄, a reonstrução do orpo não é essenial para o reonheimento das
açõeshumanas. A visãoomputaional geralmente é tratada omo umproblema de
re-uperação [Horn,1986 ℄,busando reuperar (reonstruir) o mundoe suas propriedades,
omo a posição 3D e formatos dos objetos, de modo a realizar ações e tomar deisões
baseados nessasinformações. Aloimonosquestionou a tradiionalabordagem
reonstru-ionistae propso paradigmadavisãoqualitativa-objetiva(purposive-qualitative) omo
umaalternativa. Nesseparadigmaavisãonãoé vistaomoumm,massimomoparte
de um proesso maior que visa, por exemplo, realizar determinadas tarefas. A
abor-dagem deve serobjetiva paraformularassoluções orretas(simples) paraos problemas
de baixo nível extraídas de imagens reais, têm sido objeto de numerosos estudos
[Yamato etal.,1992 ℄ sendo utilizadas, por exemplo, para ontagem de pessoas a
par-tir da identiação de regiões andidatas. Em geral, as araterístias de baixo nível
não forneem desrições tão rias quanto as representações baseadas em modelos, mas
seu proesso de extração é mais simples e robusto que os proedimentos de ajuste dos
modelos.
Freeman[Freeman etal.,1996 ℄utilizouaabordagembottom-up paraimplementar
in-terfaes para jogos baseadas em visão omputaional. Foram implementadas interfaes
baseadas em ténias omo momentos da imagem, histogramas de orientação e uxo
óptio,queapartirdosgestosdousuário ontrolavaosjogos. Apliaçõesgráas
intera-tivastêm a grandevantagem de permitir aexploração do feedbak visual da tela,pois o
usuário vê imediatamente o resultadodo seugesto e pode alterá-loasoneessário. Por
exemplo,seumusuário seinlinaparafazerumaurvanojogoevêqueainlinação não
foisuiente, elepode seinlinar umpouo mais.
Uma desvantagemda abordagem bottom-up équea desriçãode ategorias deações
em representações de baixo nível é mais difíil que em representações de alto nível
(baseadas em modelos), pois as relações entre as dimensões do vetor de
araterísti-aseadesriçãodealtoníveldasategoriasnãoéexplíita. Alémdisso,asdimensõesdo
vetor de araterístias podemser muito grandes para serem entendidasintuitivamente
[Yamato etal.,1992 ℄.
Gestos estátios são denidos omo o reonheimento de uma posição da mão
ou do orpo enquanto gestos dinâmios são identiados por trajetórias do braço ou
da mão. Um dos prinipais problemas no aso dos gestos estátios é a
identi-ação da mão. A maioria dos trabalhos restringe fortemente o ambiente de
utiliza-ção exigindo bakground uniforme [Segen eKumar, 1998 ℄, bakground estátio, luvas
oloridas ou maradores na mão [Cipollaetal.,1993 , Davise Shah,1994 ℄. Deteção
de mãos em quaisquer bakgrounds foi realizado, por exemplo, por Triesh e Malsburg
[Triesh evon derMalsburg, 1996 ℄ obtendo uma taxa de aerto de 86.2% e por Cui e
Weng [Cuie Weng, 1999 ℄,porémnenhumdessesmétodosé apazderealizar adeteção
em tempo real, requisito das interfaes om o usuário. Alguns trabalhos apresentam
métodosapazesde reonheera posturadamãoindependentementedoângulodevisão
[Wue Huang,2000 , Rosales etal.,2001, Onge Bowden, 2004 ℄,porém esses artigos não
fazem nenhuma ressalva quanto à exeuçãoemtemporeal.
Para o reonheimento de gestos dinâmios é feito em geral o rastreamento de um
omplexo, uma vez que os dados amostrados da trajetória de qualquer gesto variam
para ada exeução do mesmo. Isso é justiado por várias razões omo freqüênia de
amostragem, erros de rastreamento, ruído e, prinipalmente, variações na exeução do
gesto peloser humano, tanto espaial quanto temporal[Hong etal.,2000a ℄.
Reentemente algumas abordagens baseadas em sistemas a eventos disretos foram
propostas paraamodelageme reonheimento de gestos. Umadasprinipaisvantagens
dessa abordagem é que a mesmanão requerum grandeonjunto de dados paratreinar
o modelo[Hong etal.,2000a ℄. Bobike Wilson [Bobik eWilson, 1997 ℄utilizaram uma
abordagem baseada em estados para representar e reonheer gestos onde ada gesto
foi modelado omo uma seqüênia de estados em um espaço de ongurações. Os
dados para treinamento foram alinhados temporalmente e segmentados manualmente.
Primeiro,diversasamostrasdeumgestosãoutilizadasparaomputarsuaprinipalurve
[Hastie eStuetzle, 1989 ℄queéparametrizadapeloomprimento doaro. Omapeamento
de ada ponto da amostra do gesto exemplo para umomprimento de aroao longo da
urvaé umprodutodesse áluloda urva. Aseguir,segmentosderetadeomprimento
uniforme são utilizados para aproximar a urva disretizada. Cada segmento de reta é
representado porumvetor etodosossegmentosde retasãoagrupados emlusters. Um
estadoédenidoparaindiaroluster aoqualumsegmento deretapertene. Umgesto
entãoé denido por umaseqüênia de estados. O proesso de reonheimento onsiste
emavaliarseumatrajetóriapassaou nãopelosestadosna ordemorreta. Cadagesto é
umatrajetóriaúniano espaço.
Hong et al. [Hongetal.,2000b ℄ utilizaram MEFs (Máquinas de Estados Finitos)
parareonheergestosdinâmios. Asposições2Ddaabeçaedasmãosforamutilizadas
omo araterístias, sendo loalizadas utilizando segmentação por or e rastreamento.
Cada gesto foi modelado omo uma seqüênia de estados no espaço espaial-temporal
(spatial-temporal),sendoadaestadomodeladoomoumaGaussianamulti-dimensional.
Hong onsiderouque astrajetórias de umgestosão umonjunto de pontos distribuídos
espaialmente, podendoportantoser representadospor umonjunto deregiõesespaiais
Gaussianas. Um limiar foi seleionado para representar a variânia espaial permitida
para ada estado, determinando a variânia espaial do gesto. O número de estados e
seus parâmetros foram alulados utilizando k-means dynami lustering nos dados de
treinamento do gesto, sem informação temporal (as informações espaiais e temporais
dos dados de treinamento sãoprimeiro desaopladas). O resultado desse primeiro
trei-namento é utilizado para a segmentação e alinhamento dos dados. O modelo então é
iade estadosé umaMEFreonheedora deumgesto. Toda essa etapade treinamento
é realizada o-line. Quando um novo vetor de araterístias é omputado, ada MEF
deideseontinuanoestadoatualouvaiparaopróximoestadobaseadonosparâmetros
espaiais e temporais. Quando o estado nal é atingido o gesto é onsiderado
reonhe-ido. Caso o estado nal de mais de uma MEF seja atingido ao mesmo tempo, aquele
om a menor distânia média aumulada é onsiderado o venedor. O reonheimento
é realizado on-line. Essa ténia foi testada om suesso em gestos omo aenar om a
mão esquerda, aenar om a mãodireita, desenhar um írulo, desenhar um oito,entre
outros. A omplexidade omputaional do proessamento foi reduzida por meio do
ar-mazenamento do ontexto nas MEFs, sendo proessados apenas os novos dados a ada
quadro.
Posteriormente, Hong [Hongetal., 2000a ℄ utilizou uma variação do algoritmo de
asamento de padrões Knuth-Morris-Pratt(KMP) para aelerar o proessamento,
on-siderandooreonheimento degestosomo umasamento deadeia dearateres entre
umaseqüênia de dadosea seqüênia de estadosdaMEF.
Davis e Shah[Davise Shah,1994b ℄ utilizaram umamáquina de estadosnitos para
modelar quatro fases diferentes de um gesto genério qualitativamente. Se a mão está
emmovimento para a posição do gesto são riadastrajetórias dosdedosusando
orres-pondênia dospontos daspontasdosdedosdomovimentono planoda imagem. Vetores
sãoutilizadosentãoparaaproximar astrajetórias eosgestosdesonheidos sãoasados
om os gestosde umabibliotea usando esses vetores. Foram reonheidos sete gestos,
querepresentamasaçõesesquerda,direita, paraima,parabaixo,agarrar,girareparar,
sema utilizaçãode hardwareespeial.
Siskind e Morris [Siskinde Morris,1996 ℄ propuseram uma metodologia para
lassi-ação de eventos visuais utilizando uma abordagem de máxima verossimilhança. Seu
trabalho se baseou na modelagem das araterístias dos pers de movimentação,
va-riando ao longo do tempo, de objetos que partiipam emdiferente eventos simples. Os
eventosonsiderados foram pegar, deixar,empurrar, puxar,soltare lançar (pik up, put
down, push, pull, drop, throw). Em vez de formular lógias detalhadas e modelos
geo-métrios de lasses de eventos manualmente, os parâmetros de um modelo genériosão
determinados empiriamente a partirdos dadosde treinamento. Orastreador utilizado
usaumonjunto deténiasbaseadas emore movimento,operandoquadroaquadro e
rastreandodemaneiraindependenteobjetosoloridosequesemovimentam. Cadaregião
identiada no quadro é modelada omo uma elipse, abstraindo-se assim dos dados da
nheimento de eventos. Utiliza-se ténias de aprendizado supervisionado para treinar
um modelo gerador para ada lasse de eventos a partir de um onjunto de exemplos
de treinamento para ada lasse. O modelo gerador obtido é utilizado para lassiar
asnovasobservações em lasses existentes. Um dos vídeos do onjunto de treinamento
é esolhido para ser o evento annio. Esse vídeo deve onter o mesmo número de
se-qüênias de elipses tais quaisexistem objetos partiipando no evento. Essasseqüênias
sãoutilizadasomoreferêniaparaidentiar osonjuntosdeelipsesnasdemais
seqüên-ias de treinamento. Os vídeos foram ajustados manualmente paraque o iníio e o m
do vídeo oinidissemom o iníio e mdo evento e também para que todosos vídeos
representando o mesmo evento tivessem o mesmo número de quadros. O experimento
utilizou umonjunto de72 vídeos, sendo12 paraada gesto. Desses,6 foramutilizados
paratreinamento e6 paravalidação, esolhidosaleatoriamente.
AsprinipaisdiferençasdaabordagemdeSiskindeMorrisparaaquelapropostanesta
dissertaçãosãooreonheimentoontínuoon-line,semneessidadedaindiaçãodoiníio
e m de ada evento e a utilização de Modelos Oultos de Markov (MOMs, do inglês,
Hidden Markov Models) disretos no lugar dos ontínuos. O método de rastreamento
utilizado por Siskind e Morris também restringe queos objetos partiipantes do evento
sejampratiamenteosúniosnaenaeexigepós-proessamentoparaaidentiaçãodos
objetos queestãoem todaa seqüênia.
Vogler e Metaxas[Vogler e Metaxas,1998 ℄ apresentaram umarabouço parao
reo-nheimento isolado e ontínuo da linguagem de sinais ameriana (ASL- Amerian Sign
Language). Os dadosforam obtidos por umsistemade rastreamento 3De apresentados
omo entrada paraMOMs realizarem o reonheimento. Três âmeras posiionadas
or-togonalmente eram responsáveis pela identiação e rastreamento em 3D. O algoritmo
de rastreamento baseou-se no ltro de Kalman objetivando evitar problemas ausados
por olusão. Paraotreinamento foramutilizadosdadosdevisãoomputaionaledeum
aparatode apturademovimento,devido àgrandequantidadede dadosneessáriapara
treinar os MOMs e o alto usto omputaional do sistema de visão. O reonheimento
ontínuo é omplexo pois as fronteiras entre os gestos individuais não são laras. A
utilização de MOMspermite apturar as variações estatístias tanto na posição quanto
na duração dos movimentos, bem omo a segmentação dos dados. A identiação das
fronteiras entre os símbolos foi realizada utilizando informações geométrias e da
tra-jetóriaperorrida juntamenteomoalgoritmo deViterbi[Viterbi, 1967 ℄para identiar
o iníio de ada gesto. Vogler utilizou a topologia esquerda paradireita por aomodar
zando486 frases,totalizando2345 sinais. Dessasfrases,389(80%) foramutilizadaspara
treinamento e 97 (20%) para validação, esolhidas aleatoriamente. O reonheimento
obtevetaxa de aerto de89,91%.
AabordagempropostanestadissertaçãodiferedadeVoglerpoissugereproedimento
paragerarosmodelosautomatiamente,inlusivedeterminandooseunúmerodeestados.
Também não neessita da informação de posição, pois o rastreamento 3D é omplexo.
Além disso, não exige segmentação para identiar o iníio de ada gesto, sendo essa
identiação realizadaimpliitamentepelomodelo.
Redes Neuraistambém foram utilizadasno reonheimento de gestos. Por exemplo,
Yang e Narendra [Yang e Ahuja,1999 ℄ utilizaram redes neurais om atraso de tempo
(TDNN - time-delay neural network) para o reonheimento de 40 gestos da
lingua-gens de sinais ameriana (ASL- Amerian Sign Language). TDNN é uma rede neural
multi-amadasfeedforward queutilizaatrasosentreasamadaspararepresentarrelações
temporais entreoseventosnotempo. Osistemasebaseouemalgoritmospara
reonhei-mento eextraçãodepadrõesdemovimento utilizando trajetórias. Foramutilizados80%
dos dados paratreinamento e 20% paravalidação, obtendo taxa de reonheimento de
96.21% nosdadosde validação.
Esteapítuloapresentouostrabalhosrelaionadosidentiandoasprinipais
diferen-ças entre estes e a metodologia proposta neste trabalho. O próximo apítulo apresenta
Coneitos Preliminares
Esteapítulotemporobjetivointroduzirosoneitosneessáriosparaoentendimentoda
metodologiapropostanestadissertação. Eleédivididoemtrêsseçõesprinipais: sistemas
aeventosdisretos,adeiasdeMarkoveMOMs. Ostextosdasseçõestemaráterapenas
introdutóriosendoreomendadasasreferêniasitadasparamaisinformaçõesedetalhes.
AsprimeirasseçõessãobreveseaquetratadeHiddenMarkovModels (ModelosOultos
de Markov) é mais detalhada por ser um assunto ainda não tão disseminado quanto os
demais.
3.1 Sistemas a Eventos Disretos
UmSistema a Eventos Disretos(SED) deve satisfazerasseguintes ondições: o espaço
de estados deve ser um onjunto disreto e o meanismo de transição entre estados
deve ser dirigido por eventos. Portanto um SED pode ser denidoomo umsistema de
estadosdisretos, dirigidoporeventos, uja evolução dosestadosdepende daoorrênia
de eventosdisretosassínronosdurante otempo[Cassandras e Lafortune,1999 ℄.
Oomportamento deumSEDpodesermodeladoporumalinguagem,se
onsiderar-mosoonjunto deeventos
E
omooalfabeto easseqüênias(nitas) deeventosomo aspalavras. Umeventopodeserdenidoomoalgoqueoorreinstantaneamenteequeausatransiçõesde umvalor de estadopara outro.
A utilizaçãode autmatos é umformalismo paraa modelagemde eventos disretos,
assimomoautilizaçãoderedesdePetri. Ambososformalismosrepresentamlinguagens
utilizando umaestrutura de transição de estados. A diferença entre osdois é omoeles
0
a
1
b
b
2
a, c
c
2
0
Figura 3.1: Exemplo de autmato om três estados onde
X
=
{
0,
1,
2
}
,E
=
{
a, b, c
}
,q
0
= 0
(maradopelaseta) eXm
=
{
0,
2
}
.Um autmato é umdispositivo apazde representaruma linguagem de aordo om
regras bemdenidas. Umautmatodeterminístio,representadopor
G
,é umatuplade seiselementosG
≡
(X, E, f,
Γ, q
0
, X
m
)
,
(3.1)onde:
X
é oonjunto de estados;E
é o onjunto nitode eventosassoiados omastransiçõesemG
;f
:
X
×
E
→
X
é a função de transição;f
(x, e) =
y
signia que há uma transição do estadox
para oestadoy
denidapeloeventoe
;Γ :
X
→
2
E
é a função de eventos ativos (ou fatíveis);
Γ(x)
é o onjunto de todososeventos
e
para os quaisf
(x, e)
é denida, denominada onjunto de eventos ativos (ou fatíveis) deG
emx
;q
0
éo estado iniial;X
m
∈
X
éo onjunto de estadosmaradosou nais. A Figura3.1exemplia essasdenições.Se
X
é um onjunto nito,G
é denominado um autmato de estados nitos deter-minístio (AEFD) . Esse modelo também é onheido omo Generalized Semi-MarkovSheme (GSMS) .
3.2 Cadeias de Markov
A análise de adeias de Markov fornee um arabouço para o estudo de diversos SEDs
de interesse prátio, variando de jogos de azar e do merado de ações até o projeto de
sistemasde omputadores e redes deomuniação [Cassandrase Lafortune,1999℄.
0
1
a
01
a
00
a
11
2
a
12
a
02
3
a
23
a
20
a
31
Figura3.2: Cadeiade Markovom quatro estados(
0
a3
).estadodo onjuntode
N
estadosdistintos0,
1,
· · ·
, N
−
1
,omo ilustradona Figura3.2, ondeN
= 4
. Em instantes disretos, uniformemente espaçados, o sistema passa por uma transição (possivelmente para o mesmo estado) de aordo om um onjunto deprobabilidadesassoiadas aoestado. Osinstantesde tempo assoiadosàstransiçõessão
denidos omo
t
=
t
0
, t
1
,
· · ·
, e o estado no instantet
é representado porqt
. Em geral, umadesriçãoompleta dessesistemarequeraespeiaçãodoestado atualnoinstantet
, bem omo todos os estados predeessores. Para o aso espeial de uma adeia de Markovdisretadeprimeira ordem,essadesrição probabilístiaétrunadaparaapenasoestado atual e seupredeessor,i.e.,
P
[qt
=
Sj
|
qt
−
1
=
Si, qt
−
2
=
Sk,
· · ·
] =
P
[qt
=
Sj
|
qt
−
1
=
Si].
(3.2)Oproesso desrito onstitui um modelode Markovobserváveluma vez quea saída
do proesso é o onjunto de estados em ada instante de tempo, onde ada estado
or-responde a umevento observável.
AprinipalaraterístiadasadeiasdeMarkovéqueseuomportamentoestoástio
é denido pelas probabilidades de transição da forma
P
[q
k
+1
=
x
′
|
q
k
=
x]
, ondex
é o estado atual ex
′
é o próximo estado, para todos os valores de
x
,x
′
. Dadas essas
probabilidadesdetransiçãoeumadistribuiçãoparaoestadoiniialépossíveldeterminar
aprobabilidade deseestar em qualquerestado emqualquer instante.
Uma adeiade Markové denidapor [Cassandras eLafortune, 1999 ℄:
1. Umespaço deestados
X
.2. Adistribuição iniial de probabilidades
p
0
(x) =
P[q
0
=
x],
∀
x
∈
X
. 3. As probabilidades de transiçãop(x
′
, x)
ondex
é o estado atual ex
′
é o próximo
As probabilidades de transição podem ser representadas na forma de uma matriz,
denominadamatriz deprobabilidades de transição,
A
,A
≡
[aij
(k)],
i, j
= 0, . . . , N
−
1
(3.3)onde
aij
(k)
é aprobabilidade de seatingiro estadoj
oriundo doestadoi
noinstantek
, formalmenteaij
(k)
≡
P
[q
k
+1
=
j
|
q
k
=
i].
(3.4)Como
a
ij
(k)
é uma probabilidade temos0
≤
a
ij
(k)
≤
1
eP
∀
j
a
ij
(k) = 1
paraqualquer estadoi
.O funionamento dasadeias deMarkov arámaislaro quando a metodologia for
apresentada(Seção 4.3).
3.3 Modelos Oultos de Markov
Modelos OultosdeMarkov(MOMs,doinglês,Hidden MarkovModels) 1
sãoumtipode
modelo estoástio, também onheidos omo fontes de Markov ou funções
probabilís-tias de adeias de Markov. MOMs tem sido largamente utilizados ao longo das duas
últimas déadasparao reonheimento de padrõese lassiação. Com a popularidade,
diversoslivrosontendo abordagens baseadas na utilização de MOMs foram publiados
em diversas áreas omo biomediina [Baldie Brunak, 1998 , Durbin etal.,1998 ℄, onde
sãoutilizados, porexemplo, paralassiação deproteínas emlasses, e inteligênia
ar-tiial[Russelle Norvig, 2002 ℄,ondesãoutilizados,porexemplo,paraoreonheimento
de falaegestos.
AteoriabásiafoipubliadaporBaumetal. entre1966e1972[Baume Petrie, 1966,
Baum eEgon, 1967,Baume Sell,1968 ,Baum etal.,1970 ,Baum,1972℄efoi
implemen-tadaparao reonheimento de falapor diversosautores na déadade 1970 omo Baker
[Baker, 1975 ℄. Entretanto, a popularização dos MOMs oorreu somente no iníio da
déadade 1980 oma publiaçãode diversostutoriais.
Porbrevidadeessaseçãoseráfoadanostrêsproblemas fundamentaisparaoprojeto
deMOMs,asaber: oálulodaprobabilidadedeumaseqüêniadeobservaçõesdadoum
MOM espeío; a determinação da melhor seqüênia de estadosdo modelo; e o ajuste
dosparâmetros do modelode modoa melhorrepresentar asobservaçõesforneidas.
1
Otextodessaseçãoébaseadoprinipalmentenasreferênias[Rabiner,1989,RabinereJuang,1986 ,
3.3.1 Motivação
Alimitaçãodeada estadoorresponderaumevento observávelpresentenasadeiasde
Markoveautmatosdeestadosnitosdeterminístioémuitorestritivaparaqueomodelo
setorne apliável a diversosproblemas. Nessa seção ooneito de modelo de Markov é
estendido paraonsiderar os asos emque a observação é uma função probabilístia do
estado,sendoomodeloresultante umMOM,queé umproessoduplamenteestoástio
embutido onde o proesso estoástio subjaente não é observável (é oulto) e pode
somente ser observado por meio de um outro onjunto de proessos estoástios que
produzema seqüênia de observações.
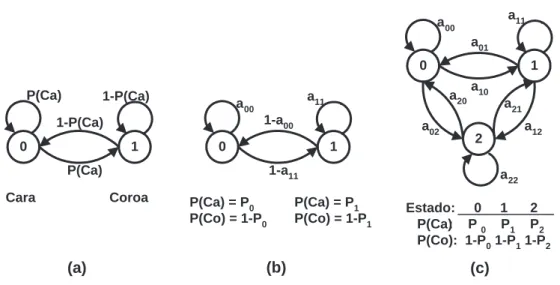
Podemos exempliar modelando o problemado lançamento de umamoeda no qual
há um quarto om uma barreira (e.g., uma ortina) de modo que não é possível ver
o que oorre do outro lado, onde uma pessoa está lançando uma moeda (ou diversas
moedas diferentes). Essa pessoa não irá dizer exatamente o que está fazendo, apenas
o resultado de ada lançamento. Dessa maneira uma seqüênia de lançamentos oultos
serárealizada,omoresultadoonsistindonumasériedearase oroas. Umaseqüênia
de observações poderiaser, por exemplo:
O
=
O
0
O
1
O
2
· · ·
OT
−
1
(3.5)=
CaCaCoCoCoCaCoCoCa
· · ·
Ca
(3.6)onde
Ca
representa ara,Co
representa oroa eT
éo omprimento da seqüênia. Para onstruir umMOM paramodelar a seqüênia de aras e oroas observadade-vemos primeirodeidir oqueosestadosdomodelorepresentam eentão quantosestados
o modelo deve ter. Uma possibilidade seria assumir que apenas uma moeda está sendo
lançada,utilizandoummodelode2estadosondeadaumdessesestadosorresponderia
aumdosladosdamoeda(i.e.,araouoroa). EssemodeloémostradonaFigura3.3(a).
Nesseasoo modelode Markové observável, sendo portanto umMOM degenerado,e o
únio parâmetro neessário para espeiaro modelo ompletamente é a probabilidade
de umdoslados.
UmaoutramaneiraseriamodelaromonaFigura3.3(b)ondesãoutilizadostambém
doisestados,porémadaestadoorrespondeaumamoedaomprobabilidadesdiferentes
paraara e oroa. Cada estado é araterizado por uma distribuição de probabilidades
dearaseoroase astransiçõesentreosestadossãodadasporumamatrizdetransição.
Omeanismofísioquedeterminaastransiçõesentreosestadosquesãoativadaspoderia
0
1
P(Ca)
1-P(Ca)
1-P(Ca)
P(Ca)
0
1
a
00
a
11 .
1-a
00
1-a
11
P(Ca) = P
0
P(Co) = 1-P
0
P(Ca) = P
1
P(Co) = 1-P
1
0
1
a
00
a
11 .
a
01
a
10
2
a
02
a
20
a
21
a
12
a
22
Estado: 0 1 2
P(Ca): P
0
P
1
P
2
P(Co): 1-P
0
1-P
1
1-P
2
(a)
(b)
(c)
Cara
Coroa
Figura3.3: TrêspossíveismodelosdeMarkovparaoexperimentodolançamentodeuma
moeda. (a) Modelo de uma moeda. (b) Modelo de duas moedas. () Modelo de três
moedas.
Uma tereira maneira de modelar a seqüênia de lançamentos observada utilizando
umMOM é apresentadana Figura3.3(). Nessemodelo sãoonsideradas 3moedase a
esolhaentreastrês é feitabaseada emumevento probabilístio.
Dados ostrês modelos mostrados na Figura3.3paraexpliar aseqüênia de aras e
oroasobservadasurgeumadúvidanatural: qualdelesrepresentamelhoressaseqüênia.
Omodelo de umamoeda possui apenas umparâmetro desonheido; o modelode duas
moedaspossuiquatroparâmetros desonheidos; eomodelodetrês moedaspossuinove
parâmetros desonheidos. Com maisgraus de liberdade osMOMsmaiores seriam
nat-uralmente maisapazes de modelar uma sériede lançamentos que osmodelos menores.
Apesar disso ser teoriamente verdade, algumas onsiderações prátias impem fortes
restriçõesquantoaotamanhodosmodelosquepodemserutilizados. Além disso,utilizar
o modelo de 3 moedas seria inapropriado no aso de apenas uma moeda estar sendo
lançada uma vez que o evento físio propriamente dito não orresponderia ao modelo
sendoutilizado.
3.3.2 Denição
UmMOM é araterizadopor:
ou ao onjunto de estados do modelo. Os estados são representados por
X
=
{
0,
1,
2,
· · ·
, N
−
1
}
,e oestado no instantet
porq
t
.2.
M
,onúmerodesímbolosdistintosobserváveisporestado(i.e.,otamanho do alfa-beto). Os símbolos observados orrespondem à saída físia do sistema modelado.Para o experimento do lançamento da moeda ossímbolos sãosimplesmentes ara
e oroa. Os símbolos sãorepresentados pelo onjunto
V
=
{
v
0
, v
1
,
· · ·
, vM
−
1
}
. 3. A distribuição de probabilidades de transição entre osestadosA
=
{
aij
}
ondeaij
é aprobabilidade de atingiro estado
j
oriundodo estadoi
,formalmenteaij
=
P
[qt
+1
=
j
|
qt
=
i],
0
≤
i, j < N.
(3.7)Paraoasoespeialdequalquerestadopoderseratingidodequalqueroutroestado
em uma únia transição temos
a
ij
>
0
para todoi, j
e o modelo é denominado ergódio. Para os demais tipos de MOMs temosaij
= 0
para um ou mais pares(i, j)
.4. Adistribuiçãoprobabilístiadeobservaçãodossímbolosnosestados,
B
=
{
b
j
(k)
}
, ondeb
j
(k)
éa probabilidade deseobservar osímbolov
k
noestadoj
,formalmentebj
(k) =
P[Ot
=
vk
|
qt
=
j],
0
≤
j < N
0
≤
k < M
.5. Adistribuição de estadosiniial
π
=
{
πi
}
,ondeπi
=
P
[q
0
=
i],
0
≤
i < N
(3.8)Dados valores apropriados para
N
,M
,A
,B
eπ
o MOM pode ser utilizado omo gerador paraforneer umaseqüênia deobservaçõesO
=
O
0
O
1
O
2
· · ·
OT
−
1
(3.9)(ondeadaobservação
Ot
éumsímbolodeV
eT
éonúmerodeobservaçõesnaseqüênia) omodesrito a seguir:1. Seleione um estado iniial
q
0
=
i
de aordo om a distribuição de estadosiniial2. Seleione
Ot
=
vk
de aordoom a distribuiçãode probabilidades dossímbolos no estadoi
(i.e.,b
i
(k)
).3. Váparao novo estado
q
t
+1
=
j
de aordoomadistribuição deprobabilidades de transição doestadoi
(i.e.,aij
).4.
t
=
t
+ 1
;retorne aoitem2 asot < T
,senãotermine.Esseproedimentopodeserutilizadotantoomogeradordeobservaçõesquantoomo
modeloparamostraromoumadadaseqüênia deobservaçõespodetersidogeradapor
umMOM espeío.
A espeiação ompletade umMOM requerportanto a espeiação dedois
parâ-metros do modelo (
N
eM
), espeiação dossímbolos observáveis e a espeiação de três distribuições de probabilidadesA
,B
eπ
. Por onveniênia é utilizada a notação ompataλ
= (A, B, π)
(3.10)paraindiaro onjunto ompletode parâmetros do modelo.
3.3.3 Os três problemas básios dos MOMs
Trêsproblemasbásiosdevemserresolvidos paraqueomodeloapresentado nasubseção
anterior possa serapliado, a saber:
Problema 1: Dada a seqüênia de observações
O
=
O
0
O
1
O
2
· · ·
OT
−
1
e o modeloλ
, omoP
(O
|
λ)
pode sereientementeomputado?Problema 2: Dada a seqüênia de observações
O
=
O
0
O
1
O
2
· · ·
O
T
−
1
e o modeloλ
, omopode serdenidaaseqüênia deestadosQ
=
q
0
q
1
· · ·
qT
−
1
quemelhor repre-senta a seqüêniaobservada, ouseja, queé ótima emalgum sentido.Problema 3: Dada a seqüênia de observações
O
=
O
0
O
1
O
2
· · ·
O
T
−
1
e o modeloλ
, omoosparâmetros do modelopodemserajustados paramaximizarP
(O
|
λ)
? O Problema 1 se resume a alular a probabilidade de uma seqüênia ter sidopro-duzidapelomodelo, dadososparâmetros domodelo ea seqüênia de observações. Esse
problema também pode ser visto omo identiar omo determinado modelo asa om
uma seqüênia de observações. A solução deste problema nos permite seleionar entre
diversosmodelospossíveisqual melhorrepresenta asobservações.
não há uma seqüênia de estados orreta a ser enontrada. Em geral é utilizado um
ritério de otimalidade pararesolveresse problemada melhormaneira possível. Porém,
existemdiversosritériosquepodemser adotadoseessa esolhaéfeitade aordooma
apliaçãona qual seráutilizada a seqüênia deestadosutilizada.
OProblema3envolveaotimizaçãodosparâmetros domodeloparamelhordesrever
umaseqüêniadeobservações. Aseqüêniautilizadaparaajustaromodeloédenominada
seqüênia de treinamento, uma vez queé utilizada paratreinar o MOM.Esse problema
em geral é o mais importante, pois permite a adaptação de modelos para representar
fenmenosreais.
A seguirserá desritaa solução paraada umdessesproblemas.
3.3.4 Solução para o Problema 1
Amaneiradiretade alularaprobabilidadeda seqüênia
O
=
O
0
O
1
O
2
· · ·
O
T
−
1
dadoo modeloλ
= (A, B, π)
seriaenumerartodasasseqüêniasdeestadospossíveisdetamanhoT
(número de observações). Considerando umaseqüênia de estadosxaQ
=
q
0
q
1
· · ·
qT
−
1
,
(3.11)onde
q
0
éoestadoiniial. Aprobabilidade daseqüênia deobservaçõesO
paraa seqüên-iade estadosda Equação (3.11)éP
(O
|
Q, λ) =
T
−
1
Y
t
=0
P
(O
t
|
q
t
, λ)
,
(3.12)supondo que asobservações sãoestatistiamenteindependentes. Então, lembrando que
b
j
(k)
éa probabilidade de seobservar osímbolov
k
no estadoj
,obtemosP
(O
|
Q, λ) =
bq
0
(O
0
)
·
bq
1
(O
1
)
· · ·
bq
T
−
1
(OT
−
1
).
(3.13)
A probabilidade daseqüênia de estados
Q
podeser esritaomoP
(Q
|
λ) =
π
q
0
·
a
q
0
q
1
·
a
q
1
q
2
· · · ·
a
q
T
−
2
q
T
−
1
.
(3.14)Aprobabilidade onjunta de
O
eQ
,ouseja, aprobabilidade deO
eQ
oorrerem simul-taneamente, édada peloproduto dosdoistermos aimaA probabilidade de
O
pode ser nalmenteobtida somando essa probabilidade onjunta de todasaspossíveisseqüênias deestadoQ
,resultando emP
(O
|
λ) =
X
∀
Q
P
(O
|
Q, λ)
·
P(Q
|
λ)
=
X
∀
Q
πq
0
bq
0
(O
0
)
·
aq
0
q
1
bq
1
(O
1
)
· · ·
aq
T
−
2
q
T
−
1
bq
T
−
1
(OT
−
1
)
.
(3.16)A Equação (3.16) pode ser interpretada da sequinte maneira. No instante iniial
(
t
= 0
) o sistema enontra-se no estadoq
0
om probabilidadeπ
q
0
e gerando o símboloO
0
om probabilidadebq
0
(O
0
)
. É então feita a transição do estadoq
0
para o estadoq
1
om probabilidadeaq
0
q
1
, gerando o símboloO
1
om probabilidadebq
1
(O
1
)
. O proessoontinuadessamaneiraatéquesejafeitaaúltimatransição,noinstante
T
−
1
,doestadoqT
−
2
parao estadoqT
−
1
oma probabilidadeaq
T
−
2
q
T
−
1
gerandoo símboloOT
−
1
om a probabilidadebq
T
−
1
(OT
−
1
)
.
De aordo om a Equação (3.16) a ada instante
t
existemN
estados que podem ser atingidos, ou seja, existemN
T
seqüênia de estadospossíveis. Para ada seqüênia
são neessárias
(2T
−
1)
multipliações e o somatório delas requer(N
T
−
1)
adições.
Portanto o número de operações neessárias para o álulo de
P
(O
|
λ)
é da ordem deO(T N
T
)
sendo omputaionalmente inviável até mesmo para pequenos valores de
N
eT
(e.g., paraN
= 5
eT
= 100
sãoneessáriasaproximadamente10
72
operações).
Felizmente existe um algoritmo mais eiente para efetuar esse álulo hamado
forward-bakward [Baume Egon,1967 , Baum eSell, 1968 ℄. Considerando a variável
di-reta (do inglês, forward)
αt(i)
denida omoαt(i) =
P(O
=
O
0
O
1
· · ·
Ot, qt
=
i
|
λ),
(3.17)que representa a probabilidade de observação da seqüênia parial
O
=
O
0
O
1
· · ·
Ot
até o instantet
e do estadoi
no instantet
, dado o modeloλ
. Podemos alularα
t
(i)
reursivamente da seguinte maneira:1) Iniialização
α
0
(i) =
π
i
b
i
(O
0
),
0
≤
i < N
(3.18)2) Reursão
αt
+1
(j) =
"
N
−
1
X
i
=0
(αt(i)aij
)
#
3) Terminação
P(O
|
λ) =
N
−
1
X
i
=0
α
T
−
1
(i)
(3.20)Opasso1iniializaasprobabilidadesdiretasomoaprobabilidadeonjuntadoestado
i
e daobservaçãoiniialO
0
. Opasso dareursão, quepodeseronsiderado o núleo do algoritmo,éaluladoonsiderandoqueoestadoatualpodeseratingidodequalquerumdos demais
N
estados, fator que é levado em onta pelo somatório da Equação (3.19). Uma vez queαt(i)
é a probabilidade de queO
=
O
0
O
1
· · ·
Ot
sejam observados e o estado no instantet
sejai
, o produtoαt(i)aij
é a probalidade de que seja observadoO
=
O
0
O
1
· · ·
O
t
eoestadoj
sejaatingidonoinstantet
+ 1
apartirdoestadoi
. Asoma dessesprodutosparatodosospossíveisN
estadosi
,0
≤
i < N
,noinstantet
resultana probabilidade dej
no instantet
+ 1
inluindo todas asobservações pariais anteriores. Assim que isso é feito ej
é onheido, a óbvio queα
t
+1
(j)
é obtido ontabilizando a probabilidade de ser observado o símboloOt
+1
no estadoj
, ou seja, multipliando o somatórioporbj
(Ot
+1
)
. AEquação(3.19)éaluladaparatodososestadosj
,0
≤
j < N
, para um dadot
; sendo então iterada parat
= 0,
1,
2,
· · ·
, T
−
2
. Finalmente o passo 3 fornee ovalordeP
(O
|
λ)
omoa soma daprobabilidades direta terminaisαT
−
1
(i)
.Esse algoritmorequer
N
(N
+ 1)(T
−
1) +
N
multipliaçõeseN
(N
−
1)(T
−
1) +
N
adições,realizandoportantodaordemdeN
2
T
operações(e.g.,paraN
= 5
eT
= 100
são neessáriasaproximadamente3000
operações,umaeonomiade 69ordensdemagnitudeemrelaçãoao métodoforça brutaapresentadoanteriormente).
Demaneirasimilarpodemosdenirumavariávelreversa (do inglês,bakward)
β
t
(i)
, que apesar de não ser utilizada na solução do Problema 1 é importante na solução dosdemaisproblemas, omo
βt(i) =
P(Ot
+1
Ot
+2
· · ·
OT
−
1
|
qt
=
i, λ),
(3.21)queéaprobabilidade deobservaçãodaseqüêniaparialde
t
+ 1
aT
−
1
dado oestadoi
no instantet
e omodeloλ
. Utilizando novamente reursão: 1) IniializaçãoβT
−
1
(i) = 1,
0
≤
i < N
(3.22)2) Reursão
β
t
(i) =
N
−
1
X
j
=0
Nainiialização
βT
−
1
(i)
éarbitrariamentedenidoomo1
paratodoi
[Rabiner, 1989℄. O passo 2 onsidera que para que se tenha passado pelo estadoi
no instantet
e para levar emonta asobservaçõesdo instantet
+ 1
emdiante,devemseronsiderados todos os estadosj
possíveis no instantet
+ 1
levando em onta a probabilidade de transição dei
paraj
(o termoa
ij
) bem omo a observaçãoO
t
+1
noestadoj
(o termob
j
(O
t
+1
)
). Entãodevemserlevadasemontaasdemaisobservaçõespariaisapartir doestadoj
(o termoβt
+1
(j)
).O álulo de
β
t
(i)
,0
≤
t < T
,0
≤
i < N
, também requer da ordem deN
2
T
operações, omopode seridentiado seguindo raioínio similar aodo áluloanterior.
Eisner [Eisner, 2002 ℄apresentou umaplanilhadidátiaparao aprendizadodoalgoritmo
forward-bakward quemostratodososseuspassoseapresentaosresultadosgraamente.
3.3.5 Solução para o Problema 2
Hádiversasmaneirasde resolvero Problema2pois,diferentementedo Problema1,esse
problema,queonsisteemenontraraseqüêniadeestadosótimaassoiadaaumadada
seqüênia observada, não possui solução exata. Diversos ritérios podem ser adotados
para identiar o ótimo. Por exemplo, um ritério possível é seleionar os estados
qt
que são individualmente mais prováveis. Esse ritério maximiza o número esperado deestados orretos individualmente. Entretanto, pode haver problemas om a seqüênia
de estados resultante. Por exemplo, aso o MOM possua transições om probabilidade
zero (
a
ij
= 0
para algumi, j
), a seqüênia enontrada omo ótima pode não ser uma seqüênia válida.Umasoluçãopossíveléalteraroritériodeotimalidade. Porexemplo,poderiaser
en-ontradaaseqüêniadeestadosquemaximizaonúmerodeparesdeestado
(q
t
, q
t
+1
)
or-retos,ou triplasde estados(qt, qt
+1
, qt
+2
)
orretas, et. Apesar dessesritériospoderem fazersentido paraalgumas apliações, oritério maisutilizado é enontrar amelhorse-qüêniade estados (aminho),ou seja, maximizar
P
(Q
|
O, λ)
. Uma téniaformalpara enontrar a melhor seqüênia de estados existe, baseada no método da programaçãodinâmia, denominadaalgoritmo deViterbi [Viterbi,1967 ℄.
Esse algoritmo, apesar de importante no ontexto dos MOMs, não será desrito
por não ter sido utilizado na metodologia proposta nesta dissertação. Para deixar
laro a importânia desse algoritmo podemos itar o trabalho de Vogler e Metaxas
3.3.6 Solução para o Problema 3
Otereiroemaisomplexoproblemaonsisteemajustarosparâmetrosdomodelo(
A
,B
,π
) demodoa maximizar aprobabilidade dedeterminada seqüênia ser observada. Esse problemanãopossuisolução analítia. Dadaumaseqüênia deobservaçõesnitaparaotreinamento, nãohámaneiraótimadeestimarosparâmetrosdomodelo[Rabiner,1989 ℄.
Podemos,entretanto, esolher
λ
= (A, B, π)
talqueP(O
|
λ)
sejamaximizadoloalmente utilizando umalgotirmoiterativo omoo métodode Baum-Welh (ou equivalentementeo EM - Expetation-Maximization), ou utilizar ténias baseadas no gradiente. Nessa
subseção será apresentado um método iterativo para seleionar os parâmetros do
mo-delobaseado nos trabalhosiniiais de Baum [BaumePetrie, 1966 ,Baum e Egon,1967,
Baum eSell,1968 , Baum etal.,1970 ,Baum,1972 ℄, ompiladopor [Rabiner,1989℄.
Paradesrever oproedimento de reestimação (melhoriaeatualização iterativa) dos
parâmetros do MOM será denida
ξ
t
(i, j)
, a probabilidade de se estar no estadoi
no instantet
e noestadoj
no instantet
+ 1
, dadoo modeloe aseqüênia de observações.ξ
t
(i, j) =
P
(q
t
=
i, q
t
+1
=
j
|
O, λ)
(3.24)Partindo da denição das variáveis direta e reversa podemos esrever
ξt(i, j)
da seguintemaneiraξt(i, j) =
αt(i)aij
bj(Ot
+1
)βt
+1
(j)
P(O
|
λ)
(3.25)=
P
N
−
1
α
t
(i)a
ij
b
j
(O
t
+1
)β
t
+1
(j)
i
=0
P
N
−
1
j
=0
α
t
(i)a
ij
b
j
(O
t
+1
)β
t
+1
(j)
(3.26)
ondeonumeradorésimplesmente
P
(qt
=
i, qt
+1
=
j, O
|
λ)
eadivisãoporP
(O
|
λ)
fornee aprobabilidade desejada.Podemos denir a variável
γt(i) =
P(qt
=
i
|
O, λ)
(3.27)que representa a probabilidade de se estar no estado