NATAL-RN SETEMBRO /2014
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE CIÊNCIAS EXATAS E DA TERRA
Programa de Pós-graduação em Ciências Climáticas
ANEMÔMETRO ULTRASSÔNICO BASEADO EM SENSOR DE
DISTÂNCIA
ANEMÔMETRO ULTRASSÔNICO BASEADO EM SENSOR
DE DISTÂNCIA
ALESSANDRO DIONISIO DA SILVA
Orientador: Prof.Dr. Carlos Chesman de Araújo Feitosa
Coorientador: Prof.Dr. Alexandre Barbosa de Oliveira
COMISSÃO EXAMINADORA
Prof.Dr. José Humberto de Araújo (UFRN)
Prof.Dr. Charlie Salvador Gonçalves (UFPE)
Dissertação de Mestrado submetida á Coordenação do Programa de Pós-Graduação em Ciências Climáticas, do Centro de Ciências Exatas e da Terra da Universidade Federal do Rio Grande do Norte como parte dos requisitos para obtenção do título de Mestre em Ciências Climáticas.
Dedicatória
A Deus;
A minha mãe Maria Cícera da Silva, pela educação e formação de caráter que meu deu.
A meus familiares;
A minha noiva Deyzianne dos Santos Fonseca pelo apoio e incentivo;
A meus amigos;
Aos colegas de laboratório;
Agradecimentos
A Deus por me dar forças para chegar até aqui.
Aos professores Alexandre Barbosa de Oliveira e Carlos Chesman de Araújo Feitosa.
Aos colegas de laboratório Abner Carlos e Gustavo.
Ao técnico de laboratório Ricardo.
RESUMO
Neste trabalho propomos o desenvolvimento de um anemômetro ultrassônico utilizando
sensores de distância. A velocidade do vento é uma variável meteorológica importante para o
estudo da dinâmica da atmosfera, mudanças no clima e plantações agrícolas. Com isso se faz
necessário avanços em estudos que possibilitem cada vez mais a caracterização do
comportamento do vento. Atualmente existem diversos tipos de anemômetros para medir
velocidade do vento, entre os quais se destaca o anemômetro ultrassônico devido à precisão
nas medidas. Porém este dispositivo possui um alto custo dificultando a utilização do mesmo.
Sendo assim, buscamos baixar o custo do anemômetro ultrassônico, desenvolvendo um
aparelho capaz de medir a velocidade do vento, utilizando sensores de distância. Neste tipo de
anemômetro a velocidade do vento é aferida com base no tempo de trânsito do pulso
ultrassônico, mesma técnica presente nos sensores de distância para medidas de espaço. Aqui
foram feitas diversas montagens buscando a melhor configuração a qual pudéssemos utilizar o
sensor de distância para mensurar a velocidade do vento. Arranjos com anteparo e
transdutores separados são exemplos, de montagens trabalhadas que serão detalhadas no
capítulo 3. Com as medidas coletadas (sem e com vento) foram gerados histogramas, que
mostram a distribuição dos registros de tempo de trânsito da onda sonora para cada caso.
Duas das configurações estudadas apontam resultados favoráveis quanto ao uso do sensor de
distância na medida da velocidade do vento.
ABSTRACT
In this work we propose the development of an ultrasonic anemometer using distance sensors. The wind is an important tool for studying the dynamics of the atmosphere, changes in climate and agricultural crops meteorological variable. Thus it is necessary advances in studies that provide increasingly characterizing the behavior of the wind. Currently there are several types of anemometers to measure wind speed, among which stands out due to the ultrasonic anemometer accuracy in measurements. But this device has a high cost difficult to
use. Therefore, we sought to lower the cost of the ultrasonic anemometer, developing an
apparatus capable of measuring wind velocity using distance sensors. In this type of anemometer wind speed is measured based on the transit time of the ultrasonic pulse, in this same distance sensors to space technique measures. Here various assemblies seeking the best configuration which could use the distance sensor to measure wind speed were made. Arrangements bulkhead and separate transducers are examples of worked assemblies that will be detailed in chapter 3. With the measures collected (with and without wind) histograms, which show the distribution of records transit time of the sound wave for each case were generated. Two of the studied configurations show favorable results regarding the use of the distance sensor as the wind speed.
SUMÁRIO
CAPÍTULO – 1 INTRODUÇÃO ... 11
1.1– Hipótese ... 12
1.2 – Objetivo Geral ... 12
1.3 – Objetivo Específico ... 12
CAPÍTULO 2 - FUNDAMENTAÇÃO BIBLIOGRÁFICA ... 13
2.1 - Tipos de anemômetros ... 13
2.1.1 - Anemômetro de rotação ... 13
2.1.2 - Anemômetro termoelétrico ... 14
2.1.3 - Tubo de Pitot ... 14
2.1.4- Anemômetro a laser... 16
2.1.5 - Anemômetro ultrassônico ... 17
2.2 - Propriedades das ondas sonoras ... 18
2.2.1 - Velocidade de propagação do som ... 18
2.2.2 - Influência do vento na propagação da onda sonora. ... 21
2.2.3 - Geração de ultrassom no anemômetro. ... 22
2.2.4 – Configuração dos transdutores no anemômetro ultrassônico. ... 22
2.3 – Métodos de operação do anemômetro ultrassónico. ... 25
2.3.1 – Operação por tempo de trânsito. ... 25
2.4 - Técnicas para estimação do tempo de trânsito do pulso ultrassônico. ... 25
2.4.1 – Método da diferença de fase. ... 26
2.4.2 - Método de limiar de tensão. ... 26
2.4.3 – Método da correlação cruzada. ... 28
CAPÍTULO 3 – MATERIAS E PROCEDIMENTOS ... 30
3.1- Montagens com o sensor HC-SR04 ... 31
3.2 – Montagens com o sensor LV-Maxsonar-EZOTM ... 32
3.3 – Coleta de dados ... 33
CAPÍTULO 4 - RESULTADOS E DISCUSSÕES ... 35
4.1 – Montagem com anteparo ... 35
4.2 – Montagem com sensores colocados um de frente ao outro. ... 39
4.3 – Montagem com transdutores separados ... 40
CAPÍTULO 5 - CONCLUSÃO ... 53
5.1 Montagens... 53
CAPÍTULO 6 - PESPECTIVAS ... 55
LISTA DE FIGURAS
Figura 2 – Fotografia de um anemômetro de conchas com um dispositivo acoplado para medida da
direção do vento. ... 13
Figura 1 – Fotografia de um anemômetro digital de rotação, portátil com hélices. ... 13
Figura 3 – Fotografia do anemômetro termoelétrico e zoom do elemento sensor de fio quente. 14 Figura 4 – Ilustração de um tubo de Pitot, onde é medida no ponto (A) a pressão estática e no ponto (B) a pressão de estagnação, por meio da variação na altura (h) da coluna do líquido ilustrado de cor preta (HALLIDAY,2002). ... 15
Figura 5 – Fotografia de um anemômetro digital portátil com tubo de Pitot ... 15
Figura 7 – Fotografia da parte superior de um anemômetro ultrassônico composto por quatro transdutores distantes 20cm um do outro. ... 17
Figura 8 - Ilustração da propagação do som no ar ... 18
Força do elemento não perturbado ... 19
Força de compressão ... 19
Figura 9a – Ilustração de um pulso de pressão se deslocando em direção a um elemento de ar não perturbado... 19
Figura 9b – Ilustração de elemento de ar comprimido. ... 19
Figura 10 a – Ilustração de onda sonora se propagando no mesmo sentido do vento. ... 21
Figura 10 b – Ilustração de onda sonora se propagando em sentido oposto ao vento. ... 21
Figura 11b - Ilustração de vetores de velocidade das partículas do meio. ... 23
Figura 11a – Configuração de transdutores ... 23
Figura 12 – Ilustração de transdutores funcionando como emissor e receptor. ... 24
Figura 13 – Ilustração do sinal emitido e recebido ... 27
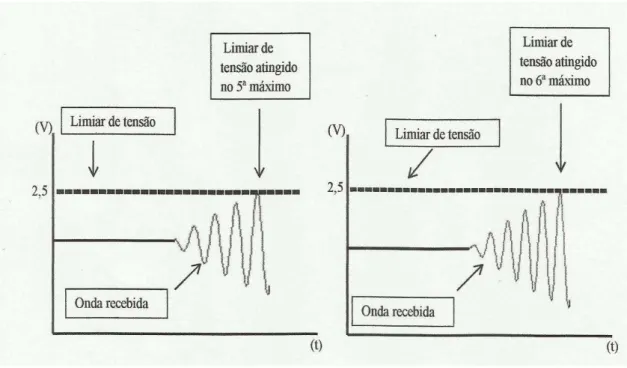
Figura 14 – Ilustração do método de limiar de tensão ... 28
Figura 16 – Fotografia do sensor de distância HC-SR04, contendo dois transdutores, um oscilador de cristal e a placa de circuito. ... 30
Figura 17 – Ilustração do sensor de distância LV – Maxsonar-EZOTM , onde podemos visualizar um transdutor e a placa de circuito. ... 31
Figura 18 – Ilustração de montagem com anteparo ... 31
Figura 19- Ilustração de arranjo de sensores (HC-SR04) em lados opostos ... 32
Figura 21 – Arduino UNO (www.arduino.cc) ... 33
Figura 22 – Arduino Nano (www.arduino.cc) ... 34
Figura 23 – Ilustração da arduino Mega 2560 ... 34
Figura 24- Histogramas de tempo de trânsito com o ventilador ligado e desligado ... 36
Figura 25. Histogramas mostrando distribuições semelhantes para medidas diferentes. ... 36
Figura 26 - Gráfico mostrando a diferença entre os tempos e a velocidade do vento. ... 37
Figura 29 – Ilustração dos sensores colocados um de frente ao outro ... 39
Figura 30 b – Sensor HC –SR04 com os transdutores separados ... 40
Figura 30 a – Sensor HC –SR04 ... 40
Figura 31 – Montagem com transdutores separados. ... 40
Figura 32 – Histogramas gerados com dados de tempo coletados com os transdutores separados.41 Figura 33a- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – Sem vento. ... 42
Figura 33b- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – vento no mesmo sentido de propagação da onda. ... 42
Figura 33c- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – vento em sentido contrário ao sentido de propagação da onda. ... 43
Figura 34 – Ilustração de transdutores funcionando ora como emissor ora como receptor. ... 43
Figura 35 – Chave analógica usada para permutar a configuração dos transdutores ... 43
Figura 37 – Esquema de permuta usando chave analógica CD4066B ... 45
Figura 38 – Ilustração de mini relés 5V ... 46
Figura 39 – Circuito integrado ULN2004 ... 46
Figura 40 – Esquema do circuito com relés. ... 47
Figura 41 – Histogramas mostrando os registros de tempo sem vento para transdutores separados ... 48
Figura 42 – Módulo relé usado para comutar os transdutores ... 48
Figura 43 – Histogramas mostrando os registros de tempo com vento para os transdutores separados. ... 49
Figura 44 – Ilustração da configuração dos transdutores com ângulo de 60º. ... 49
Figura 45 – Anemômetro de rotação AD -145 ... 50
Figura 46 – Gráfico mostrado a relação entre o comercial e experimental. No gráfico constam três medidas para cada ponto (velocidade). ... 51
LISTA DE TABELAS
Tabela 1-Valores de velocidade do vento convertidos em ... 54
LISTA DE SÍMBOLOS
LDA – Laser doppler anemometer
LIDAR – Light detection and ranging
Tx – Emissor
Rx – Recptor
- Massa especifica
B – Módulo de elasticidade volumétrica
L1 – Comprimento de um elemento de ar
p –Variação de pressão
P1 – Pressão inicial de um elemento de ar
F – Força
L – Variação de comprimento
M – Massa molar
– Velocidade do som no ar
– Velocidade da onda sonora
– Velocidade do vento
tida –Tempo de ida
tvolta–Tempo de volta
Ø – Diferença de fase
f – Frequência da onda sonora
- Componente da velocidade do vento paralela ao eixo entre os transdutores.
CAPÍTULO – 1 INTRODUÇÃO
O vento é uma variável importante para o estudo do clima, agricultura e regiões propícias
à implantação de energia eólica. Mapear os fluxos de vento é estritamente relevante para
alimentar os modelos de previsão na meteorologia. Já na agricultura, o vento é uma variável
que pode modificar o crescimento, reprodução e distribuição de plantações no campo
(KOYAMA, 2009). Conhecer bem a velocidade e a direção do vento de uma região é um dos
primeiros passos para a instalação de torres eólicas. Sendo assim, é necessário cada vez mais
avanços em técnicas e equipamentos utilizados para caracterizar a dinâmica dos ventos.
Um aparelho utilizado no estudo dos ventos é o anemômetro, dispositivo que mensura a
velocidade do vento. Alguns são capazes de medir não só a velocidade, mas também sua
direção e sentido. Atribui-se a invenção do anemômetro ao italiano Leon Battista Albert em
1450. O dispositivo da época consistia de um disco disposto perpendicular à direção do vento.
Era possível inferir a velocidade do vento quando este passasse pelo disco causando um
aumento em sua inclinação.Hoje existem os mais variados tipos de anemômetros (de rotação,
termoelétrico, com tubo de Pitot, ultrassônico, etc). Porém, muitos apresentam limitações que
restringem seu uso, dependendo das condições climáticas, como temperatura e umidade ou do
desgaste que as partes mecânicas apresentam durante seu uso. O anemômetro ultrassônico
apresenta algumas propriedades que o coloca em vantagem em relação aos outros modelos,
tais como:
- Ausência de partes móveis. Com isso não há demanda em manutenção constante;
- Estrutura física robusta. Por isso pode ser usado em ambientes turbulentos e
sujeito a intempéries.
- Não obstrui a passagem do fluido. Assim, pode ser utilizado não só para medir a
velocidade do vento, mas também de vários outros fluidos.
No entanto, seu alto custo dificulta a sua aplicação. Este projeto tem como objetivo
propor um anemômetro ultrassônico de baixo custo baseado no uso do sensor ultrassônico de
distância. Além disso, o estudo do princípio de funcionamento do anemômetro ultrassônico
será abordado e como medidas de tempo de trânsito de pulsos sonoros podem ser usadas para
medir a velocidade dos fluidos.
A medição da velocidade de fluido usando sensores ultrassônicos é fundamentada na
determinação do tempo de trânsito (tempo de propagação da onda sonora entre um transdutor
pelo fluxo de fluido (ALMEIDA, 2004). Geralmente este tipo de anemômetro possui
transdutores que emitem um pulso ou trem de pulsos de ondas sonoras com frequência de 40
kHz. A opção de se fazer o estudo com base na utilização de sensores de distância
ultrassônicos deriva das características apresentadas por alguns sensores de distância. Elas são
bem semelhantes a dos transdutores encontrados nos anemômetros ultrassônicos. Os sensores
de distância modelo HC-SR04 e LV-Maxsonar-EZO, utilizados nesse trabalho emitem pulsos
ultrassônicos com frequência de 40 kHz. A medida da distância é efetuada a partir do tempo
de trânsito do pulso sonoro, mesmo método presente nos anemômetros ultrassônicos para
mensurar velocidade de vento.
1.1– Hipótese
A hipótese de que os sensores de distância ultrassônicos de baixo custo podem ser
utilizados na montagem de um anemômetro ultrassônico, abre a perspectiva de que é possível
reduzir o custo do anemômetro. Isso facilita o uso do anemômetro ultrassônico permitindo
avanços nos estudos do vento.
1.2 – Objetivo Geral
Abrir perspectivas para reduzir o custo do anemômetro ultrassônico facilitando a
aquisição do mesmo.
1.3 – Objetivo Específico
CAPÍTULO 2 - FUNDAMENTAÇÃO BIBLIOGRÁFICA
Neste capítulo são apresentados os principais equipamentos encontrados no mercado para
medir velocidade dos ventos e também é feita uma visão geral das propriedades sonoras com
foco no ultrassom, destaque dessa dissertação.
2.1 - Tipos de anemômetros
Anemômetro são aparelhos que medem a velocidade e direção do vento. Eles são
amplamente utilizados em túneis de vento, aeroportos, estações meteorológicas e pesquisas
para instalação de torres eólicas.
2.1.1 - Anemômetro de rotação
Este aparelho é comumente encontrado em estações meteorológicas. Consiste em um
dispositivo composto por pás, em formas de conchas ou hélices (ver Fig. 1 e 2), que giram em
torno de um eixo de suporte com rolamentos. Nesse caso a geometria do dispositivo permite
medir apenas a componente do vetor velocidade do vento perpendicular ao plano das pás, pois
a componente paralela do vetor velocidade não contribui para a rotação das pás. A velocidade
de rotação é mensurada através de um tacômetro que pode ser mecânico, óptico ou elétrico.
Um ponto positivo em se utilizar este anemômetro é o baixo custo, porém o mesmo possui
peças móveis que estão em contínuo movimento sendo necessária manutenção constante do
aparelho. Além disso, o anemômetro de rotação não mede a direção do vento. Para tal é feito
o acoplamento de um dispositivo que indica a direção do vento, como pode ser visto na Fig.2.
Outra desvantagem é que a velocidade inicial do vento precisa ser capaz de vencer a inércia
dos copos ou hélices (KOYAMA, 2009).
Figura 1 – Fotografia de um anemômetro digital de rotação, portátil com hélices – Faixa de medição: 0,3 a 45m/s.
Figura 2 – Fotografia de um anemômetro de conchas com um dispositivo acoplado para medida da direção do vento – Faixa de medição: 0,9 a 50m/s.
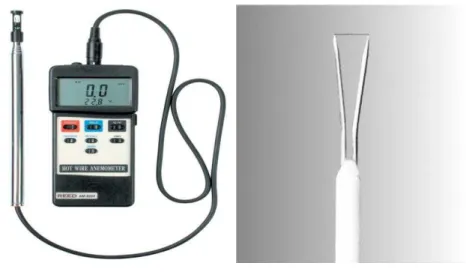
2.1.2 - Anemômetro termoelétrico
Este tipo de equipamento mensura a velocidade de fluidos a partir de trocas de calor entre
o fluido e um sensor térmico. O sensor usado geralmente são fios (ver Fig.3) ou filmes
(cilindro isolante recoberto por fio metálico) finos condutores de calor com diâmetro na
ordem de 5 µ m. O metal comumente usado como elemento sensível é a platina ou tungstênio.
Para aquecer o sensor é mantido uma corrente ou tensão constante. A medida de velocidade é
feita aferindo-se a variação de temperatura devido à passagem do vento.
Outra forma de se medir a velocidade do vento usando sensores termoelétricos é
mantendo a temperatura constante. Nesse método a velocidade é medida a partir da variação
de corrente necessária para manter a temperatura estável.
Os pontos favoráveis a este tipo de anemômetro é não possuir partes móveis e ter uma
maior sensibilidade para baixas velocidades de vento (PINTO,2006). Porém como o sensor
precisa estar exposto ao ambiente para ocorrer uma melhor troca de calor fica susceptível a
danos, visto que o mesmo é fragil. Danos físicos provocados por ventos com alta velocidade e
danos físico-químicos como oxidação e acúmulo de sujeiras, que alteram a resistência elétrica
do elemento sensor.
2.1.3 - Tubo de Pitot
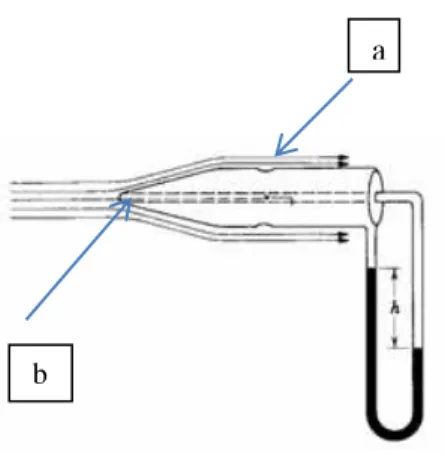
O anemômetro com tudo de Pitot, mostrado na Fig.5 funciona com base na variação da
pressão medida em um tubo, onde uma das extremidades fica voltada em sentido contrário ao
deslocamento do vento. Como se observa na Fig.4 ele é formado basicamente por um tubo em
forma de U onde suas extremidades se conectam formando um L.
No ponto (a) na extremidade externa (ver Fig. 4) é medida a pressão estática (ar
parado). A abertura da extremidade interna é colocada no sentido contrário ao fluxo de ar. No
ponto (b) é medida a pressão de estagnação, ou seja, a pressão quando a velocidade do fluxo
de ar dentro do tubo é reduzida a zero. Conhecendo a pressão estática e de estagnação,
pode-se obter a velocidade da massa de ar que provoca a alteração na pressão, pois pela equação de
Bernoulli temos que a soma da pressão estática ( ) mais a pressão dinâmica ( é igual à
pressão de estagnação ( ):
A vantagem em se utilizar o Tubo de Pitot é a facilidade em ser construído e o pequeno
custo. Mas o mesmo se mostra ineficiente para baixas velocidades. Outra desvantagem é a
necessidade de que o tubo esteja bem alinhado com a direção do vento para que a medida seja
precisa.
Figura 5 – Fotografia de um anemômetro digital portátil com tubo de Pitot. Faixa de medição – 2 a 45m/s
Figura 4 – Ilustração de um tubo de Pitot, onde é medida no ponto (a) a pressão estática e no ponto (b) a pressão de estagnação, por meio da variação na altura (h) da coluna do líquido ilustrado de cor preta (HALLIDAY,2002).
a
2.1.4- Anemômetro a laser
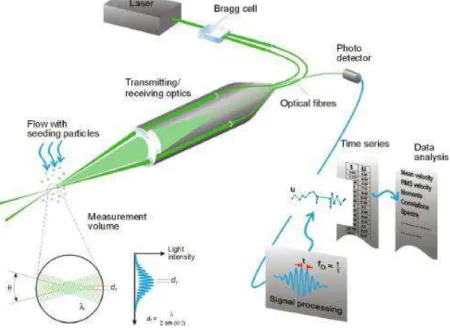
O LDA (Laser Doppler Anemometer) contém um sistema óptico que emite um feixe de
laser. Este feixe é dividido em dois feixes que posteriormente se cruzam formando uma zona
de interferência mostrada na Fig. 6. Este anemômetro requer que estejam presentes no fluido
pequenas partículas capazes de seguir a orientação do fluido e refletir a luz. Estas partículas
podem ser de pó, água, fumaça, etc. Quando as partículas passam pela zona de interferência
difundem uma luz que possui frequência proporcional ao movimento das partículas entre as
franjas de interferência.
Um dispositivo capta a luz refletida nestas partículas. A variação das frequências (Efeito
Doppler) registradas é relacionada à velocidade do fluido.
Entre as vantagens deste tipo de anemômetro está o fato de não possuir partes móveis e
ter uma grande faixa de medição de velocidade de fluido. Porém para seu uso é necessária à
existência de partículas em suspenção no fluido para que ocorra o efeito Doppler. Com isso a
sua utilização tem sido quase que unicamente em laboratórios de pesquisa.
No entanto, uma variação do LDA é o LIDAR (Light Detection And Ranging) que é um
tipo de radar de luz acoplado aos aero geradores (Turbina Eólica). Com um funcionamento
semelhante ao LDA, o LIDAR fornece informações sobre o vento que pode atingir o aero
gerador por meio da detecção das características da massa de ar. Sabendo as características do
Figura 6 – esquema de funcionamento do LDA –
vento que vai atingir a torre eólica é possível ajustar as pás do gerador de forma a obter o
melhor rendimento.
2.1.5 - Anemômetro ultrassônico
Esse anemômetro mede a velocidade de fluidos com base no tempo de trânsito de um
pulso sonoro. A velocidade de propagação do som depende das características do meio em
qual se propaga. Fatores como densidade e temperatura influenciam na velocidade de
propagação da onda sonora. Outro ponto importante que influencia na propagação do som é o
movimento das partículas do meio como será discutido em seções posteriores. Com isso é
possível aferir a velocidade do vento sabendo o tempo de trânsito de um pulso ultrassônico
entre dois transdutores (Emissor/receptor).
Diferente dos outros anemômetros este é mais robusto, tendo em vista que o elemento
sensor não precisa estar em contato direto com o fluido a qual se aferi a velocidade. Isso lhe
permite ser utilizado no estudo de vários fluidos e em ambientes com ventos turbulentos.
Outra vantagem é o fato de não possuir partes móveis (ver Fig. 7), nem obstruir a passagem
do fluxo. Além de medir a velocidade do vento o anemômetro ultrassônico, também mede a
direção do vento. Para isso é necessário um arranjo bidimensional, por exemplo, com quatro
transdutores como pode ser observado na Fig. 7.
Figura 7 – Fotografia da parte superior de um anemômetro ultrassônico composto por quatro transdutores distantes 20cm um do outro – Faixa de medição: 0 a 70m/s.
2.2 - Propriedades das ondas sonoras
Ondas sonoras são ondas mecânicas, ou seja, precisam de um meio material para se
propagar (Sólido, líquido ou gasoso). Elas se propagam como ondas de pressão transferindo
energia ponto a ponto, sem transportar massa. A pressão causada em um ponto do meio
devido a vibrações provoca compressões e rarefações como ilustrado na Fig.(8).
As ondas sonoras podem ser classificadas quanto a sua frequência de propagação.
Aquelas que possuem frequência entre 20 Hz e 20 kHz são denominadas sônicas (faixa
audível pelo ouvido humano). Já as que estão abaixo de 20 Hz são infrassônicas, e as que
estão acima de 20 kHz são ultrassônicas.
Atualmente ondas sonoras são usadas para determina fissuras em estruturas de concreto, na
localização de objetos através do sonar (localiza embarcações e destroços afundados), na
medicina para visualizar órgãos através de exames de ultrassom dentre outras aplicações.
Aqui vamos usá-la para medir velocidade do vento.
2.2.1 - Velocidade de propagação do som
Como o som é uma onda mecânica, a velocidade de propagação depende das propriedades
do meio. Atributos inercias e elásticos definem quão veloz pode ser uma onda sonora em
certo ambiente. No caso do ar, a contribuição inercial é a massa específica (1,21kg/m3) e a
elástica é o módulo de elasticidade volumétrica B (Define a variação de volume de um
elemento quando submetido a uma pressão).
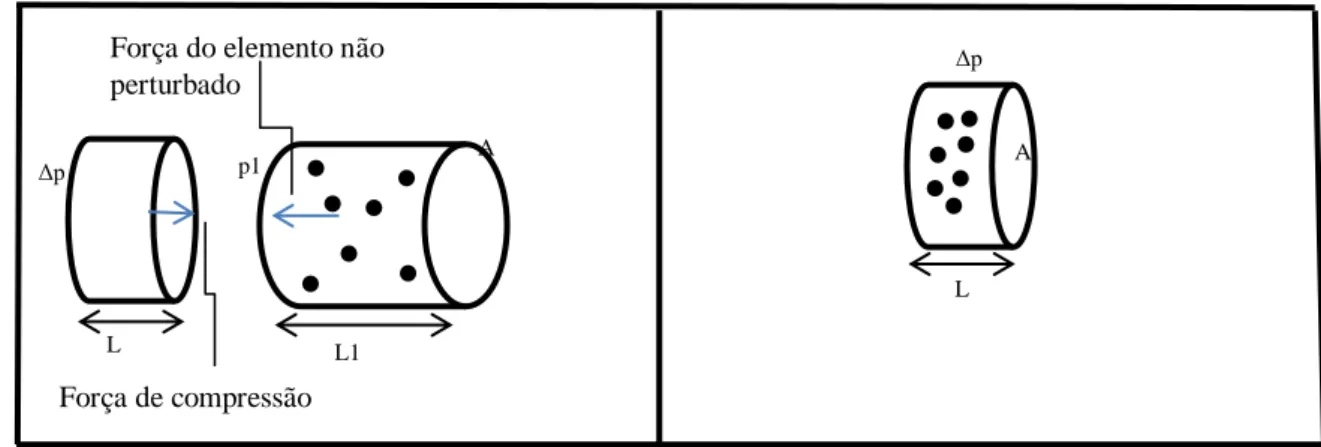
Quando um ambiente é perturbado (nesse caso o ar) um pulso de pressão se desloca
provocando áreas de compressão e rarefação. A figura 9a ilustra um pulso de pressão se
deslocando em direção a um elemento de ar com comprimento L1, área da seção transversal
(A) e pressão inicial (p1). Quando o pulso de pressão atingir o elemento de ar, causa a
compressão do mesmo (ver Fig.9b) alterando o comprimento para L e a pressão para Δp.
Figura 8 - Ilustração da propagação do som no ar
O pulso de compressão exerce uma força de compressão para a direita enquanto que a
parte do elemento não perturbado exerce força para a esquerda. Da relação de força e pressão
( F = pA) temos
Força de compressão = (p1 + Δp) A e Força do elemento não perturbado = p1A.
Sendo assim a força externa resultante no elemento é AΔp.
Considerando o elemento de ar como um sistema de partículas, podemos usar a lei de
Newton na forma (Σ F = Macm ) onde M é a massa total do sistema e acm é a aceleração do
centro de massa. De (Halliday, 2002) temos
acm = e M = AL1 , onde ΔL = L2 – L1 e é o tempo que o pulso leva para se
propagar no elemento de ar.
Da segunda lei de Newton temos:
AΔp = ( AL1) ( ) (1)
O tempo t é dado por
t = , onde é a velocidade do pulso. (2)
Substituindo (2) em (1) temos:
AΔp = ( A)(
). (3)
Resolvendo (3) para temos:
L1 L
p1 A A
Figura 9a – Ilustração de um pulso de pressão se deslocando em direção a um elemento de. ar não perturbado
Figura 9b – Ilustração de elemento de ar comprimido.
L
Δp
Força de compressão Força do elemento não
= ( ) (
). (4)
Extraindo-se a raiz em ambos os lados temos:
= √
. (5)
Fazendo V = AL1 e ΔV = ΔL A temos:
= √ . (6)
Como B = -Δp/ (ΔV/V) temos que a velocidade de propagação da onda sonora no ar é dada
por
= √ , onde B é o módulo de compressibilidade. (7)
O módulo de compressibilidade determina o quanto um elemento de ar varia seu
volume quando submetido a uma pressão, temos assim, que B é a propriedade elástica do
meio enquanto que é a propriedade inercial. Se considerarmos o ar como um gás ideal,
temos de (Gettys, 1999) que
= √ . (8)
Onde é o índice adiabático, R é a constante universal dos gases (8,314J/molK), T é
temperatura absoluta e M é massa molar. Para o ar temos 1,4 e M = 0,0289 kg/mol.
Substituindo as constantes:
= 20,06 √ . (9)
Com isso vemos que a velocidade do som depende da temperatura do ar em que a onda se
2.2.2 - Influência do vento na propagação da onda sonora.
Como vimos neste trabalho à velocidade de propagação da onda sonora depende das
características do meio em que ela se propaga. Variações de temperatura, densidade
volumétrica do meio de propagação e até mesmo a velocidade e sentido das partículas do
próprio meio podem interferir na velocidade de propagação da onda sonora.
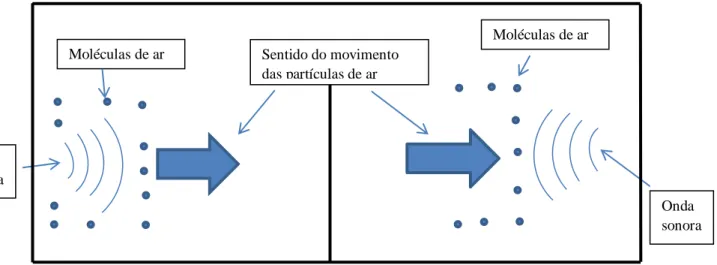
No caso do ar um fluxo de partículas (vento), por exemplo, provoca um deslocamento
direcionado das moléculas de ar, dando uma velocidade às partículas que constituem o meio.
Sendo assim, se uma onda sonora se desloca no mesmo sentido do vento ocorre um acréscimo
em sua velocidade de propagação (ver Fig. 10a). No caso contrário, quando a onda sonora se
propaga em sentido oposto a direção do vento ocorre uma redução em sua velocidade de
propagação (situação ilustrada na Fig. 10b).
Devido o acréscimo de velocidade ao meio provocado pelo fluxo de partículas (vento),
o tempo de propagação de uma onda sonora aumenta ou diminui dependendo do sentido da
mesma em relação ao vento. O anemômetro ultrassônico se baseia na influência do vento
sobre o deslocamento da onda sonora para medir a velocidade do vento.
Na próxima seção será discutida como o anemômetro ultrassônico gera a onda sonora.
Figura 10 a – Ilustração de onda sonora se propagando no mesmo sentido do vento.
Figura 10 b – Ilustração de onda sonora se propagando em sentido oposto ao vento. Onda
sonora
Moléculas de ar Sentido do movimento das partículas de ar
Moléculas de ar
2.2.3 - Geração de ultrassom no anemômetro.
O anemômetro ultrassônico pode operar emitindo uma onda sonora contínua ou um trem
de pulsos. Para gerar a onda sonora o aparelho possui transdutores piezo elétrico
(Transdutores são dispositivos que transmutam energia).
O efeito Piezo elétrico é um fenômeno no qual ocorrem variações físicas (dimensões)
quando determinados materiais são submetidos à diferença de potencial elétrico. Essa
variação nas dimensões do material provoca a perturbação do meio gerando a onda
ultrassônica. Também se pode ter o inverso, com uma onda de pressão sobre o elemento
produz-se uma diferença de potencial elétrico entre as faces do mesmo (PEREIRA, 2008).
Com isso, um mesmo sensor pode ser usado em um instante como emissor em outro instante
como receptor. Um elemento muito usado nos transdutores é o cristal de quartzo laminado
(PAREDES, 2009).
Os transdutores ultrassônicos transformam energia de forma semelhante a um alto
falante. Sendo que nos transdutores ultrassônicos as vibrações que originam as ondas sonoras
derivam do efeito piezo, geralmente em um cristal de quartzo. Em quanto que nos alto
falantes as vibrações surgem de interações eletromagnéticas entre um imã e um solenoide.
Na seção posterior trataremos da configuração dos transdutores, de maneira a obter a
velocidade do vento com base no tempo de trânsito do pulso ultrassônico (tempo de
propagação da onda sonora entre os transdutores emissor e receptor).
2.2.4 – Configuração dos transdutores no anemômetro ultrassônico.
Dispondo os transdutores um de frente ao outro como mostra a Fig. 11a, temos que o
transdutor emissor Tx emite um pulso que é captado pelo transdutor receptor Rx. A
velocidade da onda sonora sofre influência do vento com velocidade . Supondo
que a direção do vento forme um ângulo θ com a linha que liga os transdutores, esta
inclinação viria a eliminar distúrbios provocados pela incidência direta do vento sobre o
transdutor Rx. Aqui usamos uma inclinação de 60º, a qual foi estabelecida visando à
Considerando o conjunto de vetores de velocidade das partículas do meio ilustrado na
Fig. 11b temos que:
(10)
Resolvendo para temos
. (11)
Integrando em ambos os lados temos
∫ ∫
. (12)
Supondo uniforme temos
t =
, (13)
onde , é avelocidade típica do som no ar, x é o espaço
entre os transdutores e t o tempo de trânsito da onda sonora entre o transdutor emissor e
receptor.
Substituindo x por d em (13) temos para t :
t =
. (14)
Figura 11a – Configuração de transdutores. d
Tx
Figura 11b - Ilustração de vetores de velocidade das partículas do meio.
𝑣onda
Rx
Tx Tx
Rx
Resolvendo (14) para temos :
= ( (15)
Porém para o uso da equação (15) é necessário estimar a velocidade do som no ar e esta
varia com a temperatura. Uma forma de mensurar a velocidade do vento sem ser necessário
estimar consiste em aferir t contra e a favor do fluxo de partículas (vento).
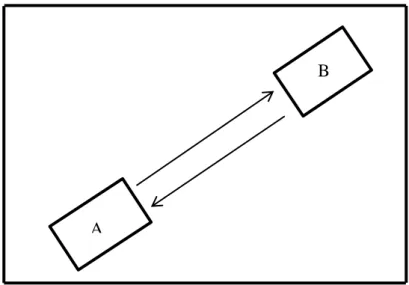
Para essa técnica os transdutores são configurados de maneira que um mesmo transdutor
funcione como emissor e receptor (ver Fig. 12). O transdutor A emite um pulso (onda sonora)
que é recebido pelo transdutor B, ocorrendo assim o registro de um tempo de trânsito de ida
(tida). Após essa medição o transdutor B funciona como emissor, emitindo o pulso que é
recebido pelo transdutor A. Dessa forma o tempo de trânsito de volta (tvolta) é medido.
As equações para os tempos de ida e volta ficam:
tida =
, (16)
tvolta =
. (17)
Rearranjando os termos:
= e (18)
A
B
= . (19)
Multiplicando (19) por (-1), somando com (18) e resolvendo para
obtemos uma equação que calcula a componente da velocidade do vento paralela ao eixo
entre os transdutores sem a necessidade de estimar dada por:
- (20)
Nessa seção vimos que sabendo o tempo de trânsito da onda sonora pode-se
mensurar a velocidade do vento. Nas próximas seções trataremos dos métodos de operação do
anemômetro ultrassônico e das técnicas para registro do tempo de trânsito.
2.3 – Métodos de operação do anemômetro ultrassônico.
O anemômetro ultrassônico pode trabalhar seguindo dois princípios distintos: Efeito
Doppler e Tempo de trânsito. Aqui trataremos apenas do método de tempo de trânsito, pois é
o método utilizado no sensor de distância ultrassônico e o mesmo é base para este trabalho.
2.3.1 – Operação por tempo de trânsito.
O anemômetro ultrassônico utiliza transdutores para emitir e receber uma onda sonora.
Um dos fatores que influencia a velocidade de propagação do som é o movimento das
partículas, que compõe o meio (ar) em que a onda se propaga.
Com isso o tempo de trânsito entre a onda emitida e recebida muda de acordo com a
velocidade de propagação da onda, que estar relacionada com a velocidade das partículas
(vento) do meio. Assim sabendo o tempo de trânsito entre a onda emitida e recebida, pode-se
medir a velocidade do vento.
2.4 - Técnicas para estimação do tempo de trânsito do pulso ultrassônico.
Existem varias técnicas que podem ser utilizadas para medir o tempo que o pulso
ultrassônico leva para ir do emissor ao receptor (tempo de trânsito). Dentre as mais usadas
2.4.1 – Método da diferença de fase.
Essa técnica se baseia na diferença de fase entre uma onda emitida e a recebida. É possível
obter o tempo de trânsito do pulso através da defasagem entre as ondas. Temos que
Δ = 2πft. (21)
Onde Δ é a diferença de fase entre a onda emitida e recebida, f é frequência da onda e t o
tempo de trânsito do pulso ultrassônico.
É necessário ajustar a distância entre os transdutores de maneira que a diferença de fase
seja zero para a velocidade do vento igual a zero. Ou seja, o sinal emitido precisa estar em
fase com o sinal recebido.
Uma vantagem em se utilizar o método da diferença de fase é o fato do mesmo ser menos
susceptível a ruídos, já que não mede o tempo de trânsito da onda sonora de forma direta que
é a medição do tempo através de um contador (cronômetro). Neste método o tempo de
trânsito é medido com base na diferença de fase entre uma onda emitida e recebida. Porém
esta técnica é limitada, tendo em vista que a medição da defasagem (Δ ) é finita, indo de 0 a
2π. O que provoca um limite na faixa de medição da velocidade do vento (PINTO, 2006).
Esta limitação não é visualizada na técnica de limiar de tensão que será apresentada na seção
2.4.2.
2.4.2 - Método de limiar de tensão.
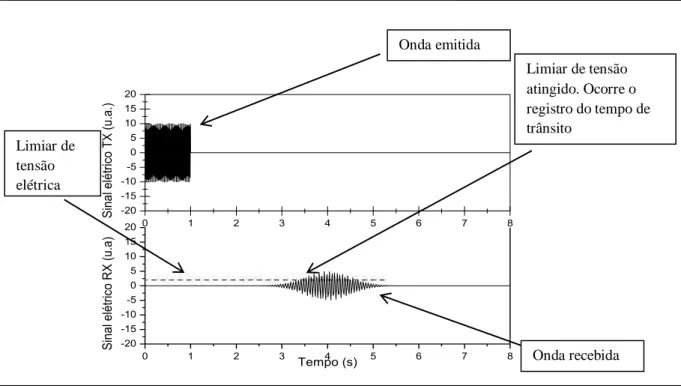
No método de limiar o tempo de trânsito do pulso ultrassônico entre o sensor emissor e
receptor é medido com base em um nível de tensão pré-estabelecido. Através de um contador
é marcado o tempo a partir do instante de emissão da onda ultrassônica. Quando o pulso é
gerado (ver Fig. 13), o contador é disparado (inicia-se a contagem do tempo) até que o sensor
receptor capte um pulso com amplitude igual à tensão pré-determinada, ilustrada na Fig.13.
Assim o temporizador registra o tempo em que a saída de um circuito comparador ficou
em um nível de tensão previamente estabelecido (Esse tempo equivale ao tempo de trânsito
do pulso ultrassônico).
O método de limiar é muito susceptível a ruídos principalmente devido a atenuações
que o próprio meio de propagação da onda causa na mesma. Como a onda emitida sofre
atenuações, não atingi o limiar de tensão sempre com o mesmo máximo como pode ser
observado na Fig.14 causando assim, o registro de tempos de trânsito diferentes. Porém
apesar do método de limiar ser susceptível a ruídos, aqui vamos usar a eletrônica do próprio
sensor de distância que funciona com este método.
Uma técnica mais adequada para a medida de tempo de trânsito é a correlação cruzada
(apresentada na seção posterior), por não apresentar as limitações presentes nos
procedimentos de diferença de fase e limiar de tensão.
Figura 13 – Ilustração do sinal emitido e recebido.
0 1 2 3 4 5 6 7 8
-20 -15 -10 -5 0 5 10 15 20 Si n a l e lé tri co T X (u .a .)
0 1 2 3 4 5 6 7 8
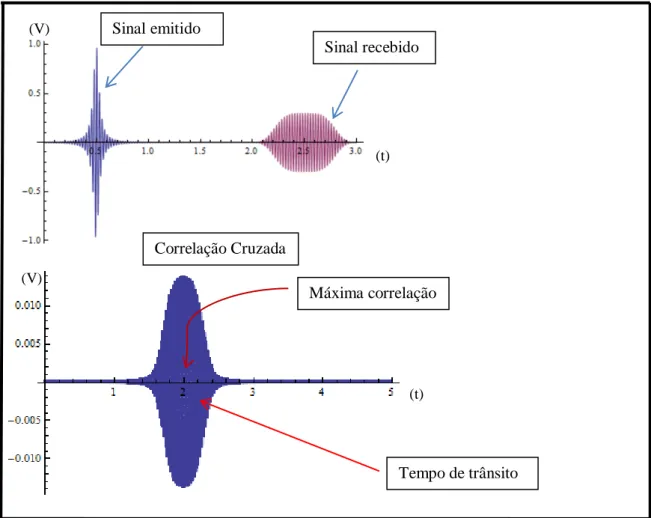
2.4.3 – Método da correlação cruzada.
O método de correlação cruzada é uma técnica de processamento de sinais, em que a
onda transmitida é cruzada e correlacionada com onda recebida, ou seja, é feito o calculo de
correlação cruzada, entre o sinal elétrico enviado para o transdutor emissor com o sinal
elétrico detectado pelo receptor (PEREIRA, 2008). O sinal emitido e recebido pelos
transdutores é digitalizado de forma a ser feito a correlação cruzada. Quando a onda sonora é
gerada, o sinal elétrico usado para excitar o transdutor é armazenado, enquanto o pulso sonoro
se propaga até o transdutor receptor o sistema fica em espera. Quando a onda sonora chega ao
receptor o sistema registra o sinal elétrico recebido, este é armazenado e é feito o cruzamento
(calculo de correlação cruzada) entre os sinais emitido/recebido. No ponto de máxima
correlação (ver Fig. 15) é estimado o tempo de trânsito da onda sonora.
A correlação cruzada minimiza os ruídos quando comparada com a técnica de limiar de
tensão e diferença de fase. A desvantagem desta técnica é o alto investimento em micro-
controladores (PEREIRA, 2008).
Figura 15 – Ilustração do sinal emitido, recebido e a correlação cruzada. Sinal recebido
Sinal emitido
Tempo de trânsito Correlação Cruzada
(V)
(t)
(V)
CAPÍTULO 3 – MATERIAS E PROCEDIMENTOS
Realizamos um estudo acerca da utilização de sensores de distância no desenvolvimento
de um anemômetro ultrassônico. Para isso usou-se dois tipos de sensores com características
semelhantes aos transdutores ultrassônicos encontrados nos anemômetros comerciais
(Frequência na faixa de 40kHz e transdutores que operam como emissor e receptor) .
O primeiro sensor de distância estudado foi HC-SR04 (Ver Fig. 16). Ele funciona emitindo
um trem de pulsos na faixa do ultrassom com frequência de 40 kHz. A distância é calculada
com base no tempo de trânsito do pulso que é refletido pelo objeto no qual se estima a
distância.
Como pode ser visto na Fig. 16 o sensor HC-SR04 possui os dois transdutores em um
mesmo lado. Outro sensor de distância usado neste trabalho foi o LV – Maxsonar-EZOTM. O
cálculo da distância ocorre de forma análoga ao sensor HC-SR04. Porém este é constituído de
apenas um transdutor (ver Fig. 17). Nesse caso um mesmo transdutor funciona como emissor
e receptor. A frequência de trabalho é de 42 kHz.
Várias montagens foram testadas buscando a melhor configuração para medição da
velocidade do vento. A primeira montagem com anteparo se baseia no tempo de trânsito da
onda sonora, emitida por um transdutor emissor que posteriormente é refletida por um
obstáculo e captada por um transdutor receptor. A segunda montagem consiste em por dois
sensores de distância um de frente ao outro, para com isso obter o tempo de trânsito de ida e
volta e usarmos a equação (20). A terceira montagem foi feita apenas com o sensor HC-SR04,
pois os transdutores foram retirados da placa de circuito e colocados um de frente ao outro.
Os detalhes de cada montagem serão apresentados na seção posterior.
Figura 16 – Fotografia do sensor de distância HC-SR04, contendo dois transdutores, um oscilador de cristal e a placa de circuito.
3.1- Montagens com o sensor HC-SR04
A primeira montagem utiliza um anteparo como ilustrado na Fig.18.
Nesse caso a velocidade do vento é medida tendo a soma dos tempos tida e tvolta ao
contrario da equação (20) que propõe a diferença entre os tempos.
tida+tvolta = (
) +( ), (22)
fazendo tida+tvolta = e resolvendo (22) para obtemos
= √ . (23)
Na segunda montagem ilustrada na Fig.19 usamos dois sensores de distância HC-SR04
de maneira a serem arranjado um em frente ao outro. Nesse caso o transdutor emissor do
sensor A emite uma onda sonora que é captada pelo transdutor receptor do sensor B. Em
contra partida o transdutor emissor do sensor B emite uma onda sonora que é captada pelo
transdutor receptor do sensor A. Buscamos com isso verificar a utilização da equação (20) na
medida da velocidade do vento com o sensor de distância.
Tx Rx
Figura 18 – Ilustração de montagem com anteparo
Figura 17 – Ilustração do sensor de distância LV – Maxsonar-EZOTM , onde podemos visualizar um transdutor e a placa de circuito.
Uma terceira montagem consiste em separar os transdutores do sensor HC-SR04 e
colocá-los um de frente ao outro como pode ser observado na Fig.20. Isso permitirá o uso da
equação (20) no calculo da velocidade do vento.
3.2 – Montagens com o sensor LV-Maxsonar-EZOTM
Para o LV-Maxsonar-EZOTM foram feitas montagens analogamente aquelas trabalhadas
com o sensor HC – SR04. Configurações com anteparo e com dois sensores dispostos um de
frente ao outro.
Tx
Rx
Rx x
Tx
Figura 19- Ilustração de arranjo de sensores (HC-SR04) em lados opostos
Tx
Rx
Tx Rx
Figura 20a– Ilustração do sensor HC –SR04
Figura 20b– Ilustração do sensor HC –SR04 com seus transdutores separados.
Transdutores
Placa de circuitos do sensor HC-SR04 A
3.3 – Coleta de dados
Para todas as montagens citadas realizamos medidas com 1000 aquisições variando a
taxa de aquisição entre 3µs e 1000 ms. Outro parâmetro variado foi à distância entre o sensor
e o anteparo (montagem com anteparo) e a distância entre os sensores/transdutores
(montagem sem anteparo). Os dados foram coletados com e sem vento. Para produzir o fluxo
de partículas (vento) na ausência de um túnel de vento usamos um ventilador. Em algumas
ocasiões usamos o túnel de vento do laboratório de ensino do departamento de física teórica e
experimental.
A análise estatística foi fundamentada em histogramas, desvio padrão da média e
reprodutibilidade. Em um primeiro momento o estudo concretizou-se com base nos valores de
tempo de trânsito coletados. Em um segundo momento com valores de velocidade.
Para controle e aquisição de dados utilizamos a plataforma arduino. A arduino é uma
plataforma de prototipagem eletrônica de estrutura aberta, que surgiu em 2005 na Itália. Como
a original arduino possui estrutura aberta existem várias cópias no mercado com funções e
configurações semelhantes. Ela é composta basicamente por um microprocessador, um
oscilador de cristal e um regulador de tensão linear. Existem vários modelos de placa arduino
no mercado onde os mais comuns são: Arduino UNO, MEGA 2560 e arduino NANO.
A arduino uno (ver Fig. 21) foi o primeiro modelo criado, ela possui um micro
controlador Atmega328, 14 pinos digitais (entrada ou saída), 6 entradas analógicas e um
oscilador de cristal de 16MHz.
A arduino Nano apresentada na Fig.22 é uma versão reduzida da arduino semelhante à
arduino UNO, onde suas dimensões são 1,8cm de largura e 4,3cm de comprimento, enquanto
que, a arduino uno possui 5,3 cm de largura e 6,8 cm de comprimento. Este modelo de
arduino tem toda a capacidade eletrônica da arduino uno, porém com 8 pinos analógicos.
A sua forma compacta permite a criação de projetos com tamanho total diminuto em relação
aos projetos com os outros modelos de arduino.
Aqui usamos a arduino Mega 2560 - http://www.arduino.cc/. Neste modelo de arduino
encontra-se um chip ATmega 2560 que permite uma placa com 54 pinos de saídas/entradas
digitas entre os quais 16 são PWM (Modulação de largura de pulso).
A arduino Mega 2560 abre espaço para projetos mais extensos, devido o grande número
de saídas e entradas existentes na mesma. A vantagem em se utilizar uma plataforma arduino
está na facilidade em seu uso, já que a placa não precisa de softwares ou hardware
sofisticados para executar seus comandos.
Por exemplo, neste trabalho os sensores são conectados a saída de 5 volts da arduino que
pode ser alimentada pela porta USB do computador. Através dos pinos digitais a plataforma
controla o envio e recebimento de dados do sensor. Essa interação ocorre de acordo com os
comandos executados por meio de uma IDE (ambiente de desenvolvimento integrado). Este
software é gratuito e a linguagem de programação é bem semelhante à linguagem C/C++.
A Mega 2560 possui uma taxa de clock de 16 MHz o que nos permite fazer medidas
com uma taxa de aquisição a partir de 3 µs (usando linguagem de alto nível).
CAPÍTULO 4 - RESULTADOS E DISCUSSÕES
Aqui tratamos dos resultados tirados a partir da análise dos dados coletados. Com o
objetivo de medir a velocidade do vento foram feitos diferentes arranjos com os transdutores.
As vantagens e desvantagem de cada montagem trabalhada serão discutidas aqui. Além disso,
discutimos e apresentamos soluções encontradas para problemas que surgiram durante as
montagens.
4.1 – Montagem com anteparo
As primeiras medidas realizadas foram feitas com o intuito de verificar se a plataforma
eletrônica composta pelo sensor de distância e pela placa arduino apresentariam sensibilidade
suficiente para medir a diferença do tempo de transito do pulso ultrassônico entre as situações
com e sem vento. Ou seja, se ocorre, mudanças no registro de tempo quando passa fluxo de
partículas (vento) no caminho entre os sensores. Compilamos um código no programa da
arduino de maneira a coletar 1000 aquisições de tempo (tempo de trânsito da onda sonora
entre os transdutores emissor e receptor). Foi colocado um anteparo a 15 cm de distância do
sensor HC-SR04. Com isso o percurso da onda sonora é de 30 cm, tendo em vista que nesta
montagem o sinal captado pelo sensor receptor é oriundo da reflexão do som (eco) no
anteparo como foi observado na Fig.18.
Com os dados coletados foram plotados histogramas mostrados na Fig.24. No eixo
horizontal dos histogramas constam o tempo de trânsito da onda sonora e no eixo vertical a
frequência com que foram registrados valores de tempo de trânsito em um mesmo intervalo
de tempo, por exemplo, no histograma com ventilador desligado (ver Fig.24) o pico maior
representa que das 1000 medidas de tempo de trânsito realizadas, 550 estão no intervalo de
818 µs a 819 µs.
Os dados coletados mostram que ocorrem modificações nos registros de tempo (tempo
de trânsito da onda sonora entre o emissor e receptor) nas medidas realizadas sem e com
vento. Podemos ver nos histogramas da Fig. 24 que sem vento o maior pico de registros de
tempo está no intervalo entre 818 µs e 819 µs, enquanto, que com vento acontece um
deslocamento no maior pico de tempo para os intervalos entre 814 µs e 815 µs, 816 µs e
Analisando os histogramas observamos uma variação nos registros de tempo. Por
exemplo, no histograma para o ventilador desligado da Fig.24 existem vários picos menores
de registro de tempo em volta do maior pico. Isso ocorre devido o método de limiar de tensão
ser susceptível a ruídos e atenuações do meio, como foi discutido na seção (2.4.2).
Neste histograma temos que o tempo de trânsito da onda sonora está entre 818µs e
819µs (intervalo de maior pico do histograma). Porém em volta deste pico existem outros
picos de registros de tempo. Os picos de intervalos de tempo abaixo de 818µs são oriundos de
ondas sonoras pouco atenuadas, ou seja, o limiar de tensão elétrica é atingido mais
rapidamente. Já os picos que estão acima de 819µs, são registros de tempo de trânsito que
derivam de ondas muito atenuadas (atraso no alcance do limiar de tensão).
Com tudo, os dados coletados mostraram uma reprodutibilidade nos registros de
tempo (tempo de trânsito do som entre os sensores emissor/receptor). Pois medidas diferentes
(ver Fig.25) para uma mesma configuração (exemplo: ventilador ligado) apresentam
distribuições (histogramas) muito semelhantes no acúmulo de tempo.
Figura 24- Histogramas de tempo de trânsito com o ventilador ligado e desligado
Figura 25. Histogramas mostrando distribuições semelhantes para medidas diferentes.
813 814 815 816 817 818 819 820 821 822 823 824 825 826 0 50 100 150 200 250 300 350 400 450 500 550 600 F re q u ê n ci a
Tempo de trânsito (microssegundos) Ventilador desligado
813 814 815 816 817 818 819 820 821 822 823 824 825 826 0 50 100 150 200 250 300 350 400 450 500 550 600 F re q u ê ci a .
Tempo de trânsito (microssegundos) Ventilador ligado
813 814 815 816 817 818 819 820 821 822 823 824 825 826 0 50 100 150 200 250 300 350 400 450 500 550 600 F re q u ê ci a .
Tempo de trânsito (microssegundos) Ventilador ligado 1
813 814 815 816 817 818 819 820 821 822 823 824 825 826 0 50 100 150 200 250 300 350 400 450 500 550 600 F re q u ê n ci a
Rescrevendo a Eq. (22) modelo teórico adotado para esta montagem, em que o tempo de
trânsito da onda sonora é dado pela soma dos tempos de trânsito da onda emitida até o
anteparo, mais o tempo da onda refletida até o sensor receptor, temos:
T = (
) + ( ) onde T = tida + tvolta
Fazendo = - componente da velocidade do vento paralela ao eixo entre
os transdutores, temos que T para (com vento) é dado por
T = (
+ ( ), (24)
para = 0 (sem vento) temos T dado por :
T =
. (25)
Fazendo obtemos a diferença entre os tempos de trânsito da onda
sonora com e sem vento.
= {[
] [
]}. (26)
Fazendo = 343 m/s, velocidade da onda sonora no ar a 20ºC e atribuindo valores
a na equação (26), obtemos a curva mostrada na Fig.26 da diferença entre os tempos de
trânsito da onda sonora sem e com vento em função da componente da velocidade do vento
paralela ao eixo entre os transdutores. Constatou-se que a diferença entre os tempos sem e
com vento deveria ser menor que 1µs para velocidades abaixo de 12m/s.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0.0 0.5 1.0 1.5 2.0 (t id a + vo lt a ) co m ve n to (
t ida
+ vo lt a ) se m ve n to ( s)
Velocidade do vento (m/s)
Diferênça entre os tempos x velocidade do vento
Porém, isto não era visualizado experimentalmente, tendo em vista que os dados
mostravam uma diferença de aproximadamente 2µs para o vento com velocidade de 3,5 m/s
(velocidade máxima da componente produzida pelo ventilador). Com isso foram realizadas
medidas diminuindo o tamanho do anteparo que inicialmente era um quadrado de 15cm de
lado para um círculo de 3cm de diâmetro. Os histogramas (ver Fig. 27) gerados a partir dos
dados obtidos com o anteparo menor mostram uma distribuição muito semelhante. Os
maiores picos em ambos os casos (sem e com vento) estão no intervalo de tempo de 830µs a
831 µs. Neste caso não é observado o deslocamento do maior pico de intervalo tempo
apresentado nos histogramas da Fig. 24. Verificamos apenas uma diminuição no maior pico e
um aumento na quantidade de picos do histograma com vento em relação ao histograma sem
vento.
Diminuindo a separação entre o sensor e o anteparo de 15 cm para 10 cm, verifica-se
que a diferença entre os tempos registrados com e sem vento aproxima-se do modelo teórico
observado na Fig.26. Os histogramas gerados a partir dos dados coletados com 10 cm de
separação entre o sensor e o obstáculo, são muito semelhantes (ver Fig. 28),ou seja, a
diferença entre os tempos de trânsito com e sem vento é muito pequena (menor que 1µs).
825 826 827 828 829 830 831 832 833 834 835 836 837 838 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a .
Tempo de trânsito (microssegundos) Ventilador ligado
825 826 827 828 829 830 831 832 833 834 835 836 837 838 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a
Tempo de trânsito (microssegundos) Ventilador desligado
Observou-se assim, uma coerência entre os dados experimentais e os valores teóricos
para a diferença entre os tempos de trânsito com e sem vento. No entanto, a arduino não
possui precisão suficiente para trabalhar com diferenças tão pequenas. Os mesmos resultados
foram observados com o sensor LV-Maxsonar-EZOTM.
Apesar da montagem com anteparo ser funcional, a mesma possui a desvantagem de
precisar de um anteparo e ser necessária a medida da temperatura para uso da Eq.23.
4.2 – Montagem com sensores colocados um de frente ao outro.
Nessa etapa foram usados quatro sensores de distância. Dois sensores do modelo
HC-SR04 e dois sensores do modelo LV-Maxsonar –EZOTM. A proposta aqui era obter o tempo
de trânsito da onda sonora no mesmo sentido do vento (tida) e contra o sentido do vento
(tvolta). Para isso pretendia-se que o sinal emitido por um sensor A fosse recebido pelo
receptor de um sensor B, e o sinal emitido pelo sensor B fosse captado pelo receptor do sensor
A (situação ilustrada na Fig.29). Mas aparentemente os sensores são projetados para
reconhecer apenas ondas emitidas pelo próprio sensor.
Figura 28 - Histogramas gerados a partir dos dados coletados com 10 cm de separação entre o sensor e o anteparo de 3 cm de diâmetro.
577 578 579 580 581 582 583 584 585 586 587 588 0 50 100 150 200 250 300 350 400 450 F rê n q u ê n ci a
Tempo de trânsito(microssegundos) Ventilador desligado
577 578 579 580 581 582 583 584 585 586 587 588 0 50 100 150 200 250 300 350 400 450 F re q u ê n ci a
Tempo de trânsito ( microssegundos) Ventilador ligado
TX
RX
RX
TX
TX/RX TX/RX
A B
A B
HC – SR04 LV – Maxonar - EZOTM
4.3 – Montagem com transdutores separados
Nesta fase usamos apenas o sensor de modelo HC-SR04, pois o mesmo é constituído de
dois transdutores, os quais foram separados (ver Fig. 30).
Os transdutores foram montados em um suporte de maneira a ficar posicionado um em
frente ao outro como mostrado na Fig.31.
Figura 30 a – Sensor HC –SR04. Figura 30 b – Sensor HC –SR04 com os transdutores separados.
As primeiras medidas de tempo de trânsito com essa montagem foram feitas com o
intuito de verificar a diferença nos registros de tempo sem e com vento (ventilador –
desligado/ligado). Pelo modelo teórico (Eq. 16) a diferença entre os tempos de trânsito sem e
com vento para 10 cm de separação entre os transdutores deve ser de aproximadamente 2,9 µs
(para ventos com de 3,5 m/s).
Analisando os histogramas da Fig.32 podemos ver uma coerência entre os dados
experimentais e a previsão teórica. Tendo em vista que os histogramas mostram um
deslocamento de 3µs no pico de maior acúmulo de tempo entre os registros com e sem vento.
Outro fato observado foi que como o som é uma onda mecânica, sua velocidade de
propagação depende das características do meio em que a onda se propaga. Uma dessas
características é o movimento das partículas que compõe o ambiente de propagação da onda
sonora. Com isso quando, houver um fluxo de partículas (vento) em sentido contrário ao
deslocamento da onda sonora (ultrassom emitido pelo transdutor) o tempo de trânsito da onda
será maior do que o tempo de trânsito quando não existir vento.
Em contra partida, quando o deslocamento das partículas (vento) do meio estiver no
mesmo sentido de propagação da onda sonora, o tempo de trânsito será menor do que seria se
não houvesse vento. Os dados coletados com os transdutores separados mostram coerência
com a fundamentação teórica citada aqui. Observamos que sem vento o tempo médio de
trânsito é 219,8 µs (ver Fig.33a). Já no caso em que o vento incide no mesmo sentido de
propagação da onda o tempo médio é de 216,8 µs (ver Fig.33b) (tempo de trânsito menor que
o tempo de trânsito sem vento). Enquanto que, o tempo médio quando o vento é direcionado
em sentido oposto ao de propagação da onda sonora é de 222,9µs (ver Fig.33c) (tempo de
trânsito maior que o tempo sem vento).
Figura 32 – Histogramas gerados com dados de tempo coletados com os transdutores separados.
211 212 213 214 215 216 217 218 219 220 221 222 223 224 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a
Tempo de trânsito (microssegundos) Ventilador desligado
211 212 213 214 215 216 217 218 219 220 221 222 223 224 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a
Os dados coletados experimentalmente mostram coerência com o que se espera pela
fundamentação teórica, conclui-se com isso, que a montagem com os sensores separados pode
ser trabalhada para aplicar o sensor de distância na medida de velocidade de vento.
Figura 33a- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – Sem vento.
Figura 33b- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – vento no mesmo sentido de propagação da onda.
211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a
Tempo de trânsito (microssegundos) Ventilador desligado
211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 F re q u ê n ci a
Tempo de trânsito (microssegundos)
Ventilador ligado no mesmo sentido de deslocamento da onda
Tempo médio de trânsito – 219,8µs
Visando uma medida mais precisa, trabalhou-se para eliminar a necessidade de se
estimar a temperatura na medida da velocidade do vento e assim poder usar a Eq.20. Para isso
é preciso que um transdutor funcione ora como emissor ora como receptor (ver Fig.34).
Sendo assim, se fez necessário a implementação de um circuito que permutasse a
configuração dos transdutores de maneira que um mesmo transdutor opere como emissor e
receptor. Inicialmente usou-se um circuito integrado do tipo chave analógica modelo CD4066
(ver Fig.35).
211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 0
50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
F
re
q
u
ê
n
ci
a
Tempo de trânsito (microssegundos)
Ventilador ligado em sentido oposto ao deslocamento da onda
Figura 33c- Histograma gerado a partir de dados coletados com os transdutores separados da placa de circuito do sensor – vento em sentido contrário ao sentido de propagação da onda.
Tempo médio de trânsito – 222,9µs
TX/RX TX/RX
Placa de circuito do sensor HC-SR04
O circuito integrado CD 4066B possui quatro chaves que funcionam de maneira
semelhante a um interruptor comum, porém controlados por níveis de tensão. Cada chave
possui um pino de controle. Quando este é levado a um nível lógico alto (2,8V a 5V) a chave
estar fechada e quando o pino de controle e levado a um nível logico baixo (0V a 2,7V) a
chave estar aberta.
A chave analógica utiliza transistores bipolares. Os transistores permitem ou não a
passagem de corrente entre dois de seus terminais dependendo da corrente que passa em um
terceiro terminal. Mas estes dispositivos não são chaves perfeitas, pois mesmo em modo
aberto ocorre uma pequena passagem de corrente.
O circuito que compõe o sensor de distância HC-SR04 é formado por dois sistemas
independentes (ver Fig. 36). O circuito responsável por excitar o transdutor e o responsável
por registrar o tempo de trânsito da onda sonora.
Figura 36 – Circuitos que compões o sensor HC-SR04. Circuito receptor
Para realizar a permuta entre os transdutores emissor e receptor foram usadas duas chaves
analógicas CD4066B mostradas na Fig.37, pois os terminas negativos não estão interligados.
Como a corrente de fuga apresentada pela chave analógica é suficiente para interferir na
permutação entre os transdutores, o circuito integrado CD4066B não é uma solução viável
para o nosso caso, pois como um mesmo transdutor estava conectado aos circuitos emissor e
receptor, uma pequena parte do pulso elétrico que deveria excitar o transdutor emissor chega
ao circuito receptor. Isso faz com que o circuito receptor registre um tempo de trânsito muito
abaixo do esperado.
Para resolver este problema usou-se um conjunto de mini-relés que associados fariam
a permuta entre os transdutores emissor e receptor. O relé é um tipo de chave acionado por
interações eletromagnéticas. Ele é composto basicamente por uma bobina, um pino central
conectado a uma armadura metálica móvel e dois contatos.
Ao acionarmos o relé a corrente elétrica que passa pela bobina gera um campo magnético
que atrai a armadura do pino central abrindo ou fechando fisicamente um circuito. Sendo
assim, resolveu-se o problema que se tinha com a chave analógica (permitia a passagem de
uma pequena corrente, mesmo em estado aberto). Para fazer a permuta entre os transdutores
foram usados quatro relés de 5 V ( Ver Fig.38), que quando testados observou-se serem
acionados a partir de 3V.
Figura 37 – Esquema de permuta usando chave analógica CD4066B.
Placa do sensor HC-SR04 CH1 / CH2
Para proteger a arduino utilizamos o circuito integrado ULN2004 ilustrado na Fig.39
que funciona como um driver de controle para corrente elétrica. Este driver permite que a
arduino controle dispositivos que trabalham com correntes superiores a 40 mA (corrente
máxima fornecida pela arduino).
O CI ULN2004 é basicamente um conjunto de transistores em configuração darlington,
o que permite que os mesmo proporcionem um ganho de corrente. Como os relés usados são
de baixa tensão, aqui usamos o ULN2004 para proteger a placa arduino de correntes inversas
oriundas da auto indução ocasionadas pelas bobinas dos relés. Configurando as ligações dos
relés juntamente com o driver de controle (ver Fig.40) é possível a comutação entre os
transdutores emissor e receptor. A automação dos relés se da por meio da compilação de um
código no software da arduino.
Figura 38 – Ilustração de mini relés 5V.