UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE
CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Arquiteturas Eficientes para Sensoriamento
Espectral e Classificação Automática de
Modulações Usando Características
Cicloestacionárias
Arthur Diego de Lira Lima
Orientador: Prof. Dr. Luiz Felipe de Queiroz Silveira
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Engenharia de Computação) como parte dos requisitos para obtenção do título de Mestre em Ciências.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte
Lima, Arthur Diego de Lira.
Arquiteturas eficientes para sensoriamento espectral e classificação automática de modulações usando características cicloestacionárias / Arthur Diego de Lira Lima. – Natal, RN, 2014. 77 f. : il.
Orientador: Prof. Dr. Luiz Felipe de Queiroz Silveira.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação Engenharia Elétrica e da Computação.
1. Cicloestacionariedade – Dissertação. Classificação automática de modulação – Dissertação. 3. Computação paralela – Dissertação. 4. CPD paralelo – Dissertação 5. Perfil-alfa reduzido – Dissertação. 6. Rádio cognitivo – Dissertação. 7. Sensoriamento espectral – Dissertação. I. Silveira, Luiz Felipe de Queiroz. II. Universidade Federal do Rio Grande do Norte. III. Título.
Agradecimentos
Ao meu orientador, professor Luiz Felipe, pela confiança e paciência.
Ao professor Samuel, pela ajuda essencial na paralelização do algoritmo apresentado neste trabalho.
Aos professores Allan, Edmar e Marcelo, pelas preciosas sugestões.
Aos colegas de laboratório e de pesquisa, Aluisio, Avelino, Danilo, Evandro, Fabrício, Ítalo, Lenival, Leonardo, Lucas, Pedro, Vitor e Tales, pelas diversas contribuições. Aos colegas de trabalho da ECT, Armando, Jeffersson, Judson, Peter, Rafael e Thiago, pela amizade e momentos de descontração.
Resumo
O aumento da demanda por sistemas de comunicação sem fio de alto desempenho tem evidenciado a ineficiência do atual modelo de alocação fixa do espectro de rádio. Nesse contexto, o rádio cognitivo surge como uma alternativa mais eficiente, ao proporcionar o acesso oportunista ao espectro, com a maior largura de banda possível. Para garantir esses requisitos, é necessário que o transmissor identifique as oportunidades de transmis-são e que o receptor reconheça os parâmetros definidos para o sinal de comunicação. As técnicas que utilizam a análise cicloestacionária podem ser aplicadas tanto em pro-blemas de sensoriamento espectral, quanto na classificação de modulações, mesmo em ambientes de baixa relação sinal-ruído (SNR). Entretanto, apesar da robustez, uma das principais desvantagens da cicloestacionariedade está no elevado custo computacional para o cálculo das suas funções. Este trabalho propõe arquiteturas eficientes de obtenção de características cicloestacionárias para serem empregadas no sensoriamento espectral e na classificação automática de modulações (AMC). No contexto do sensoriamento espec-tral, um algoritmo paralelizado para extrair as características cicloestacionárias de sinais de comunicação é apresentado. O desempenho da paralelização desse extrator de carac-terísticas é avaliado através das métricas despeedupe eficiência paralela. A arquitetura de sensoriamento espectral é analisada para diversas configurações de probabilidades de falso alarme, níveis de SNR e tempo de observação das modulações BPSK e QPSK. No contexto da AMC, operfil-alfa reduzidoé proposto como uma assinatura cicloestacioná-ria calculada para um conjunto reduzido de frequência cíclicas. Essa assinatura é validada por meio de uma arquitetura de classificação baseada no casamento de padrões. A arqui-tetura para AMC é investigada para as taxas de acerto obtidas para as modulações AM, BPSK, QPSK, MSK e FSK, considerando diversos cenários de tempo de observação e ní-veis de SNR. Os resultados numéricos de desempenho obtidos neste trabalho demonstram a eficiência das arquiteturas propostas.
Palavras-chave: Cicloestacionariedade, Classificação Automática de Modulação,
Abstract
The increasing demand for high performance wireless communication systems has shown the inefficiency of the current model of fixed allocation of the radio spectrum. In this context, cognitive radio appears as a more efficient alternative, by providing opportu-nistic spectrum access, with the maximum bandwidth possible. To ensure these require-ments, it is necessary that the transmitter identify opportunities for transmission and the receiver recognizes the parameters defined for the communication signal. The techniques that use cyclostationary analysis can be applied to problems in either spectrum sensing and modulation classification, even in low signal-to-noise ratio (SNR) environments. Howe-ver, despite the robustness, one of the main disadvantages of cyclostationarity is the high computational cost for calculating its functions. This work proposes efficient architectures for obtaining cyclostationary features to be employed in either spectrum sensing and auto-matic modulation classification (AMC). In the context of spectrum sensing, a parallelized algorithm for extracting cyclostationary features of communication signals is presented. The performance of this features extractor parallelization is evaluated by speedup and parallel eficiency metrics. The architecture for spectrum sensing is analyzed for several configuration of false alarm probability, SNR levels and observation time for BPSK and QPSK modulations. In the context of AMC, thereduced alpha-profile is proposed as as a cyclostationary signature calculated for a reduced cyclic frequencies set. This signature is validated by a modulation classification architecture based on pattern matching. The architecture for AMC is investigated for correct classification rates of AM, BPSK, QPSK, MSK and FSK modulations, considering several scenarios of observation length and SNR levels. The numerical results of performance obtained in this work show the eficiency of the proposed architectures.
Keywords: Cyclostationarity, Automatic Modulation Classification, Parallel
Sumário
Sumário i
Lista de Abreviaturas iii
Lista de Figuras vi
Lista de Tabelas ix
1 Introdução 1
1.1 Sensoriamento Espectral . . . 3
1.1.1 Detecção por Energia . . . 4
1.1.2 Filtro Casado . . . 5
1.1.3 Detecção de Características Cicloestacionárias . . . 5
1.1.4 Outros . . . 6
1.2 Classificação Automática de Modulações (AMC) . . . 7
1.3 Organização do Texto . . . 11
2 Teoria da Cicloestacionariedade de Sinais Aleatórios 12 2.1 Processos Cicloestacionários . . . 12
2.2 Função de Autocorrelação Cíclica (CAF) . . . 13
2.3 Função Densidade Espectral Cíclica (SCD) . . . 14
2.4 Estimação da Função SCD: Periodograma Cíclico . . . 14
2.5 Cicloestacionariedade de Ordem Superior . . . 16
2.6 Perfil-Alfa e Perfil-Alfa Reduzido . . . 17
2.7 AlgoritmoCyclic Periodogram Detection(CPD) . . . 18
3 Cicloestacionariedade Aplicada a Sensoriamento Espectral e a Classificação de Modulações 21 3.1 AlgoritmoCyclic Periodogram Detection(CPD) Paralelo . . . 22
3.2 Arquitetura Proposta para Sensoriamento Espectral . . . 26
3.3 Arquitetura Proposta para AMC . . . 26
3.3.1 Introdução ao Perfil-Alfa Reduzido . . . 26
3.3.2 Perfis-Alfa Reduzidos da Arquitetura Proposta . . . 28
3.3.3 Arquitetura de Classificação . . . 31
4 Análise de Resultados 34 4.1 Resultados da Arquitetura de Sensoriamento Espectral . . . 34
4.1.1 CPD Paralelo . . . 34
4.1.2 Sensoriamento Espectral . . . 37
4.2 Resultados da Arquitetura de Classificação de Modulações . . . 41
5 Conclusão 45 5.1 Artigos Publicados . . . 46
5.2 Principais Contribuições . . . 46
5.3 Propostas para Continuação do Trabalho . . . 47
Referências 49 A Cicloestacionariedade em Sinais AM 59 A.1 Função de Autocorrelação Cíclica do Sinal AM . . . 59
A.2 Função Densidade Espectral Cíclica do Sinal AM . . . 64
B Templates dos Perfis-Alfa Reduzidos 66 C Resultados do Sensoriamento Espectral a Serem Analisados 69 C.1 Resultados da detecção para BPSK ePF =1%, 5% e 10%, variando-se o tempo de observação (L) . . . 69
Lista de Abreviaturas
AM DSB-SC Amplitude Modulation with Double Sideband Suppressed Carrier (Modulação em Amplitude com Faixa Lateral Dupla e Portadora Supri-mida)
AM SSB-SC Amplitude Modulation with Single Side Band-Suppressed Carrier (Modulação em Amplitude com Faixa Lateral Única e Portadora Supri-mida)
AMC Automatic Modulation Classification (Classificação Automática de Mo-dulação)
API Application Programming Interface (Interface de Programação de Apli-cativos)
ASK Amplitude-Shift Keying (Modulação por Chaveamento de Amplitude) ATSC Advanced Television System Committee
AWGN Additive White Gaussian Noise (Ruído Aditivo Gaussiano Branco)
BFSK Binary Frequency-Shift Keying (Modulação por Chaveamento de Frequên-cia Binária)
BPSK Binary Phase-Shift Keying (Modulação por Chaveamento de Fase Biná-ria)
CAF Cyclic Autocorrelation Method (Função de Autocorrelação Cíclica) CPD Cyclic Periodogram Detection
CSCMF Cyclic Spectral Cross-Moment
CTCMF Cyclic Temporal Cross-Moment Functions FAM FFT Accumulation Method
FFT Fast Fourier Transform (Transformada Rápida de Fourier) FPGA Field Programmable Gate Array
FSK Frequency-Shift Keying (Modulação por Chaveamento em Frequência) GCC GNU Compiler Collection
GPU Graphics Processing Unit (Unidade de Processamento Gráfico) GSM (Global System for Mobile CommunicationsSistema Global para
Co-municações Móveis)
HMM Hidden Markov Model (Modelo Oculto de Markov) LTE Long Term Evolution (Evolução de Longo Prazo)
MIMO Multiple-Input Multiple-Output (Múltiplas Entradas e Múltiplas Saídas) MSK Minimum-Shift Keying (Modulação por Chaveamento Mínimo)
NTSC National Television System Committee
OFDM Orthogonal Frequency-Division Multiplexing (Multiplexação por Divi-são de Frequência Ortogonal)
OpenMP Open Multi-Processing (Multiprocessamento Aberto)
PCA Principal Component Analysis (Análise de Componentes Principais) QAM Quadrature Amplitude Modulation (Modulação de Amplitude em
Qua-dratura)
QPSK Quaternary Phase-Shift Keying (Modulação por Chaveamento de Fase Quaternária)
ROC Receiver Operating Chracteristic (Característica de Operação do Re-ceptor)
SCD Spectral Correlation Density Function (Função Densidade Espectral Cíclica)
SSCA Strip Spectral Correlation Algorithm
SVM Support Vector Machine (Máquina de Vetor de Suporte) TCMF Temporal Cross-Moment Function
WiMAX Worldwide Interoperability for Microwave Access (Interoperabilidade Mundial para Acesso por Microondas)
Lista de Figuras
1.1 Diagrama de blocos de um detector por energia. . . 4
2.1 Assinatura da modulação BPSK obtida através da função SCD. . . 17
2.2 Perfil-alfa da modulação BPSK. . . 18
2.3 Perfis-alfa das modulações AM, BPSK, QPSK, MSK e FSK . . . 19
3.1 Diagrama de blocos com o pseudocódigo do algoritmo CPD paralelo. . . 25
3.2 Diagrama de blocos da arquitetura proposta para sensoriamento por ci-cloestacionariedade. . . 26
3.3 Perfil-alfa reduzido da modulação BPSK. . . 27
3.4 Perfil-alfa reduzido da modulação MSK. . . 28
3.5 Perfil-alfa reduzido da modulação BPSK com nível de ruído de -6 dB. . . 30
3.6 Perfil-alfa reduzido da modulação MSK com nível de ruído de -6 dB. . . . 31
3.7 Diagrama da arquitetura de classificação de modulações proposta. . . 33
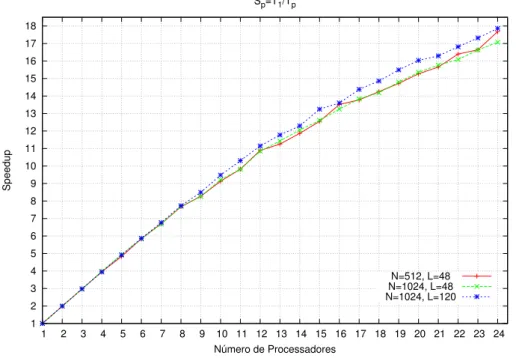
4.1 Resultados de speedup para diversos valores de tamanhos de blocos (N) e quantidade de blocos (L), variando-se a quantidade de processadores p=1,2, . . . ,24. . . 35
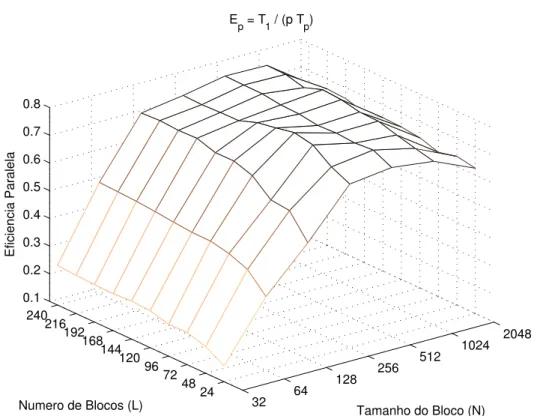
4.2 Resultados de eficiência paralela para diversas configurações de tamanhos de blocos (N) e quantidade de blocos (L), fixando-se o número de proces-sadores em 24. . . 36
4.3 Perfis-alfa das modulações BPSK e QPSK. . . 37
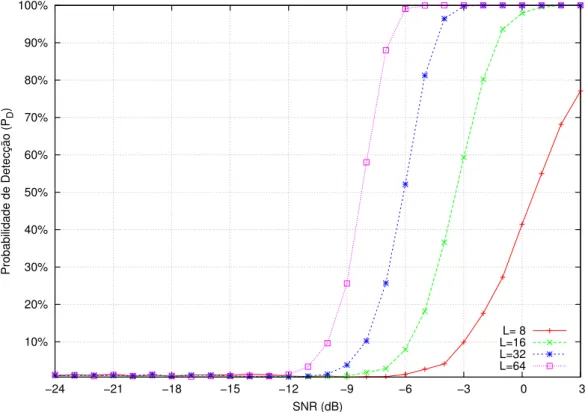
4.4 Probabilidade de detecção (PD) de um sinal QPSK, para uma probabili-dade de falso alarmePF =1% e quantidade blocosL=8, 16, 32 e 64. . . 39
4.5 Probabilidade de detecção (PD) de um sinal BPSK, para uma probabili-dade de falso alarmePF =1% e quantidade blocosL=8, 16, 32 e 64. . . 40
4.6 Curva ROC para BPSK, considerandoL=32 blocos e variando os valores de SNR de -15 a -13 dB. . . 40
4.7 Taxa de acerto do classificador para cada modulação (AM, BPSK, QPSK, MSK e FSK), comL=8 blocos e variando-se os valores de SNR de -24
a 3 dB. . . 42
4.8 Taxa de acerto do classificador para cada modulação (AM, BPSK, QPSK, MSK e FSK), comL=16 blocos e variando-se os valores de SNR de -24 a 3 dB. . . 43
4.9 Taxa de acerto do classificador para cada modulação (AM, BPSK, QPSK, MSK e FSK), comL=32 blocos e variando-se os valores de SNR de -24 a 3 dB. . . 43
4.10 Taxa de acerto do classificador para cada modulação (AM, BPSK, QPSK, MSK e FSK), comL=64 blocos e variando-se os valores de SNR de -24 a 3 dB. . . 44
4.11 Taxa média de acerto do classificador, de acordo com o tempo de obser-vação e variando-se os valores de SNR de -24 a 3 dB. . . 44
B.1 Perfil-alfa reduzido da modulação AM. . . 66
B.2 Perfil-alfa reduzido da modulação BPSK. . . 67
B.3 Perfil-alfa reduzido da modulação QPSK. . . 67
B.4 Perfil-alfa reduzido da modulação MSK. . . 68
B.5 Perfil-alfa reduzido da modulação FSK. . . 68
C.1 Resultados de PD para um sinal BPSK, fixando-se L=8 e variando-se PF =1%, 5% e 10%. . . 69
C.2 Resultados de PD para um sinal BPSK, fixando-seL=16 e variando-se PF =1%, 5% e 10%. . . 70
C.3 Resultados de PD para um sinal BPSK, fixando-seL=32 e variando-se PF =1%, 5% e 10%. . . 70
C.4 Resultados de PD para um sinal BPSK, fixando-seL=64 e variando-se PF =1%, 5% e 10%. . . 71
C.5 Resultados de PD para um sinal QPSK, fixando-se L=8 e variando-se PF =1%, 5% e 10%. . . 72
C.6 Resultados dePDpara um sinal QPSK, fixando-se L=16 e variando-se PF =1%, 5% e 10%. . . 73
C.7 Resultados dePDpara um sinal QPSK, fixando-se L=32 e variando-se PF =1%, 5% e 10%. . . 73
C.9 Comparação entre as taxas de acerto para BPSK e QPSK, comPF =1%
eL=8. . . 75 C.10 Comparação entre as taxas de acerto para BPSK e QPSK, comPF =1%
eL=16. . . 76 C.11 Comparação entre as taxas de acerto para BPSK e QPSK, comPF =1%
eL=32. . . 76 C.12 Comparação entre as taxas de acerto para BPSK e QPSK, comPF =1%
Lista de Tabelas
3.1 Localização numérica dos impulsos característicos para cada tipo de mo-dulação analisada na arquitetura proposta. . . 29 3.2 Localização genérica dos impulsos característicos para cada tipo de
mo-dulação analisada na arquitetura proposta. . . 29 4.1 Parâmetros de simulação. . . 37 4.2 Valores de limiares (λ) obtidos para as probabilidades de falso alarme
(PF) e tempo de observação (L) investigados. . . 38
Capítulo 1
Introdução
Com o avanço tecnológico, a demanda por sistemas de comunicação sem fio tem au-mentado significativamente. Entretanto, o atual modelo de alocação fixa do espectro de rádio tem se mostrado ineficiente, o que motiva o desenvolvimento de técnicas inteligentes que permitam a identificação de faixas de frequência subutilizadas, bem como a configu-ração dos parâmetros de transmissão de modo a otimizar o uso dessas oportunidades de transmissão.
Neste ambiente de comunicação inteligente, surgem, portanto, dois importantes desa-fios: a detecção de oportunidades de transmissão e a identificação automática dos parâme-tros utilizados no sinal, especialmente o tipo de modulação. Para se identificar a presença do usuário primário1 no canal, diversas técnicas de sensoriamento espectral podem ser utilizadas, como, por exemplo, a detecção por energia [Yucek & Arslan 2009].
Além do sensoriamento, esses sistemas inteligentes, tais como os rádios cognitivos, devem ser capazes de selecionar automaticamente o esquema de modulação mais apro-priado, em função da qualidade do canal de comunicação, com o objetivo de maximizar a sua eficiência [Haykin 2005]. Essa flexibilidade na escolha do formato de modulação pode requerer do receptor a habilidade de reconhecer, de forma cega, sem o auxílio de um canal de controle, o formato da modulação empregado pelo sinal detectado. Assim, ao su-portar dinamicamente uma grande variedade de esquemas de modulação, o desempenho do sistema pode aumentar significativamente.
Estudos recentes indicam que a análise cicloestacionária se apresenta como uma ferra-menta robusta capaz de tanto detectar a presença de sinais de comunicação com bastante precisão [Gardner 1991, Gardner et al. 2006], quanto de classificar o formato da modula-ção utilizada por esses sinais [Fehske et al. 2005, Headley et al. 2008, Ramkumar 2009].
1Na terminologia dos rádios cognitivos, o usuário primário é aquele detentor dos direitos de uso do
CAPÍTULO 1. INTRODUÇÃO 2
Para ser aplicada aos problemas de sensoriamento espectral e de classificação de sinais, é necessário extrair características (também chamadas de assinaturas) cicloestacionárias do sinal, o que é feito com o cálculo dafunção densidade espectral cíclica(SCD -Spectral Correlation Density Function) [Ramkumar 2009].
Uma das grandes vantagens da análise cicloestacionária é que a extração de carac-terísticas pode ser efetuada mesmo em sinais muito corrompidos por ruído. Contudo, o custo computacional para se obter essas características é elevado, o que pode tornar proi-bitiva a aplicação da técnica em sistemas de tempo real. Neste trabalho, são propostas arquiteturas onde as assinaturas utilizadas no sensoriamento e as assinaturas utilizadas na classificação de modulações podem ser obtidas de forma mais eficiente.
A primeira das arquiteturas propostas é empregada no sensoriamento espectral. Es-sencialmente, a arquitetura compara a localização de maior amplitude da assinatura com um determinado limiar, decidindo, a partir desse resultado, se há um sinal modulado no canal. Nessa arquitetura, propõe-se a paralelização de um algoritmo de cálculo das assi-naturas cicloestacionárias, o CPD (Cyclic Periodogram Detection). Com a paralelização, é possível reduzir o tempo de resposta do sistema, potencializando a aplicação da técnica em sistemas de tempo real [Renshall & Deniau 2012].
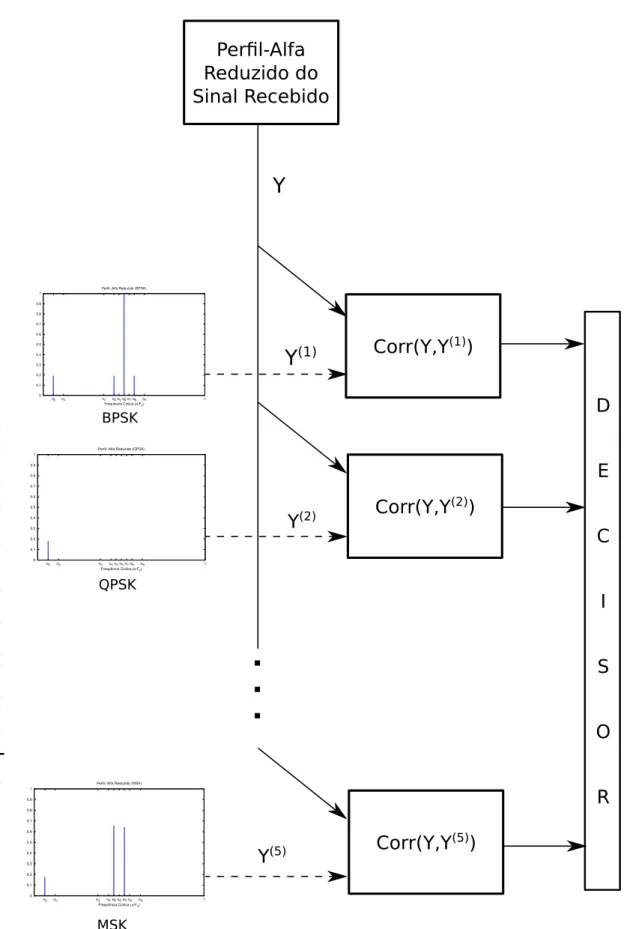
Já a segunda arquitetura, para a classificação de modulações, utiliza o conhecimento prévio sobre as características cicloestacionárias de cada modulação para se reduzir o espaço de busca onde essas características são computadas. A assinatura cicloestacionária proposta, derivada do conhecimento prévio sobre o conjunto de modulações suportadas pelo sistema, é chamada deperfil-alfa reduzido. Após obter o perfil-alfa reduzido do sinal analisado, a arquitetura realiza um casamento de padrões, por correlação, com seu banco de templates de modulações, classificando, então, de acordo com a maior similaridade obtida.
As arquiteturas propostas são avaliadas como descrito a seguir. A versão do algo-ritmo paralelizado é avaliado segundo as duas principais métricas de desempenho para-lelo [Sahni & Thanvantri 1995]: ospeedupe a eficiência. A arquitetura de sensoriamento é analisada segundo a probabilidade de detecção das modulações BPSK e QPSK, em fun-ção da relafun-ção sinal-ruído (SNR -Signal-to-Noise Ratio), de uma probabilidade de falso alarme específica2e do tempo de observação do sinal. Também são apresentadas as curvas características de operação do receptor (ROC -Receiver Operating Characteristic) como métrica de desempenho do detector. Por sua vez, a arquitetura de classificação é avaliada
2Os valores de probabilidade de falso alarme mais comumente encontrados na literatura são 1%, 5% e
CAPÍTULO 1. INTRODUÇÃO 3
de acordo com as taxas de acerto para as modulações AM DSB-SC3, BPSK, QPSK, MSK
e FSK, em função da SNR do sinal de teste e do tempo de observação do canal.
1.1
Sensoriamento Espectral
O atual modelo de alocação do espectro de rádio em segmentos licenciados tem se mostrado pouco eficiente [Tandra et al. 2009]. Assim, as propostas de uso mais eficiente do espectro, tais como os rádios cognitivos, buscam utilizar de maneira oportunista esses recursos espectrais ociosos. Isto é, esses recursos ociosos, denominados de lacunas es-pectrais (do inglês,spectrum holesouwhite spaces), poderiam ser compartilhados entre o usuário primário (licenciado) e usuários secundários (não-licenciados).
No modelo de rádio cognitivo, o usuário primário deixa de ter exclusividade no uso do canal, mas passa a ser apenas um usuário prioritário. Com isso, quando os usuá-rios secundáusuá-rios detectam a ausência do usuário primário, eles podem utilizar o canal de forma oportunista4. Portanto, um dos principais objetivos do sensoriamento do espectro é garantir que os usuários secundários não causem interferência no usuário primário.
As técnicas de sensoriamento espectral podem ser vistas como um teste de hipótese binária, em que é avaliada a hipótese da ausência do usuário primário no canal. Aceitando-se a hipóteAceitando-se nula,
H
0, conclui-se que o sinal sensoriado é composto apenas por ruído e,consequentemente, o canal encontra-se desocupado e há uma oportunidade de transmissão para os usuários secundários. Por sua vez, rejeitando-se a hipótese nula, decide-se pela ocupação do canal pelo usuário primário.
Esse teste de hipótese pode ser expresso como
H
0 : y(n) =w(n) (1.1)H
1 : y(n) =w(n) +s(n), (1.2)onde y(n) indica o sinal sensoriado, w(n) representa um ruído do tipo AWGN e s(n) é
o sinal transmitido pelo usuário primário. Sendo assim, dois tipos de erros podem ocor-rer. Um erro do tipo I, chamado de nível de significância ou falso alarme (PF), acontece
quando um canal está desocupado, mas é detectado como ocupado. Já um erro do tipo II, também conhecido como detecção perdida (PDP), acontece quando um canal está
ocu-pado, mas é definido como desocupado.
3Neste trabalho, referida simplesmente por AM.
4Esta estratégia, que será tratada nessa dissertação, é chamada deoverlay. Porém, há uma abordagem
CAPÍTULO 1. INTRODUÇÃO 4
Cada tipo de erro provoca uma forma de degradação no desempenho do sistema. Na ocorrência do falso alarme, há uma perda na oportunidade de transmissão para os usuários secundários. Por sua vez, a detecção perdida ocasiona uma interferência na transmissão do usuário primário. O desafio, portanto, é equilibrar o compromisso entre garantir opor-tunidades ao usuários secundários, sem que isso cause interferência ao usuário primário.
O desempenho das técnicas de sensoriamento espectral pode se caracterizado por suas principais métricas: a probabilidade de detecção (PD), dada porPD=1−PDP, e a
proba-bilidade de falso alarme.
Dentre os métodos usados em sensoriamento espectral podem ser citados a detecção por energia, a detecção por filtro casado, a detecção por cálculo de autovalores, a detec-ção no domínio wavelet e os detectores de características cicloestacionárias [Ikuma & Naraghi-Pour 2008, Safatly et al. 2014, Yucek & Arslan 2009].
1.1.1
Detecção por Energia
A detecção por energia é um dos algoritmos de sensoriamento espectral mais utili-zados, devido à sua estrutura simples e não ser necessário conhecimento prévio sobre o sinal do usuário primário. Entretanto, seu desempenho degrada-se significativamente em cenários de baixos valores de SNR, devido ao fenômeno da barreira de SNR (SNR wall). Isto é, há um valor de SNR a partir do qual, mesmo aumentando-se infinitamente o tempo de observação, o sensoriamento perde sua robustez [Tandra & Sahai 2008].
Na detecção por energia, a decisão sobre ocupação do canal ocorre comparando-se uma estatística de teste,V, com um certo limiar de decisão,λE. A estatística de teste do detector por energia é dada por
V =
∑
N|y(n)|2. (1.3)
Após obter a estatística de testeV, seu valor é comparado com um limiar, quando, então, o algoritmo decidirá pela presença do usuário primário, conforme ilustrado na Figura 1.1.
y(n) (.)2 V d e c i s ã o
Figura 1.1: Diagrama de blocos de um detector por energia.
Um dos objetivos dos métodos de sensoriamento espectral é maximizarPD, limitando
CAPÍTULO 1. INTRODUÇÃO 5
usuário primário, podendo, para o detector de energia, ser expressa como
PD=P(V >λE|
H
1), (1.4)enquanto a probabilidade de falso alarme pode ser formulada por
PF =P(V >λE|
H
0). (1.5)O problema, entretanto, é que a elevação do limiar λE, não somente maximiza PD,
mas tende a aumentar também o valor de PF (o oposto ocorre com a redução de λE).
Além disso, a definição do limiar é muito suscetível ao nível de SNR, o que dificulta sua aplicação em cenários de incerteza de ruído5. Um outro problema do detector por
ener-gia é que ele não é capaz de diferenciar entre interferência e sinal modulado, não sendo possível, p.ex., utilizar mecanismos de cancelamento de interferência. Essa dificuldade de diferenciação, inclusive, restringe a utilização de algoritmos para ajuste adaptativo do limiar [Cabric et al. 2004].
Apesar das limitações apresentadas, diversas propostas de utilização da detecção por energia podem ser citadas, tais como o sensoriamento em redes WLAN [Geirhofer et al. 2007] e WRAN [Kim & Shin 2010], telefonia celular GSM [Papadimitratos et al. 2005] e os padrões de TV NTSC (National Television System Committee) e ATSC (Advanced Television Systems Committee) [Leu et al. 2005].
1.1.2
Filtro Casado
O filtro casado é a abordagem ótima para detecção de sinais, já que ele maximiza a SNR do sinal recebido [Yucek & Arslan 2009]. Entretanto, a aplicação dessa técnica exige a efetiva demodução do sinal. Ou seja, de fato, é necessário o conhecimentoa priori
do sinal, de parâmetros como tipo e ordem da modulação, tipo de formatação de pulso e largura de banda, o que na prática se mostra inviável [Cabric et al. 2004].
1.1.3
Detecção de Características Cicloestacionárias
Durante a etapa de modulação de um sinal de comunicação, operações como amos-tragem, filtragem e codificação, dão origem a um sinal que pode ser modelado como sendo cicloestacionário. Isto é, o sinal modulado resultante apresenta periodicidade na sua média e na função de autocorrelação [Gardner 1988a].
CAPÍTULO 1. INTRODUÇÃO 6
Enquanto os sinais estacionários são analisados a partir da função de autocorrelação e da densidade espectral de potência, os sinais cicloestacionários são analisados por meio de generalizações dessas funções, denominadas de função de autocorrelação cíclica (CAF) e função densidade espectral cíclica (SCD), definidas em (2.6) e (2.8), respectivamente.
Além disso, a cicloestacionariedade possui uma capacidade discriminatória onde, mesmo com ruído estacionário e interferência, é possível identificar a presença do usuá-rio primáusuá-rio [Gardner 1988a]. Ou seja, a detecção de características cicloestacionárias mostra-se eficiente, inclusive em cenários com baixos níveis de SNR ou de incerteza de ruído, onde poderia ser inviável, p. ex., o uso da detecção por energia. Entretanto, apesar da robustez da técnica, a estimação das suas principais funções, a CAF e a SCD, apresen-tam um elevado custo computacional.
1.1.4
Outros
Dentre as abordagens menos usuais para sensoriamento espectral, está abaseada em autovalores[Zeng & Liang 2009], onde a ideia central é calcular a variância do ruído no sinal recebido. Resumidamente, esse algoritmo obtém os autovalores máximo e mínimo da matriz de covariância do sinal, calcula a razão entre esses autovalores e compara essa razão com um determinado limiar, tendo sido testada com sinais de microfone sem fio e de TV digital (padrão ATSC). Contudo, uma desvatagem dessa técnica é o elevado custo computacional para calcular a matriz de covariância [Zhang & Bao 2011]. Também podem ser citadas a detecção de energia baseada em estimação bayesiana [Shen et al. 2009], o sensoriamento por algoritmos de inteligência artificial [Bkassiny et al. 2012], o sensoriamento baseado na transformadawavelet[de Almeida et al. 2008] ou, ainda, esta combinada comamostragem compressiva[Liu et al. 2013].
CAPÍTULO 1. INTRODUÇÃO 7
1.2
Classificação Automática de Modulações (AMC)
Uma estratégia utilizada pelos sistemas de comunicação sem fio modernos para au-mentar a eficiência no uso do espectro é a chamadamodulação adaptativa. Os sistemas que adotam essa técnica suportam diversos tipos de modulação, mas a seleção daquela que será usada depende da qualidade do canal. Isto é, em canais com melhor qualidade, com maiores níveis de SNR, as modulações de alta ordem são preferidas. Enquanto que em canais de pior qualidade, as modulações mais robustas são recomendadas.
A modulação adaptativa com sinalização explícita ocorre em diversas tecnologias, tais como a Long Term Evolution (LTE). Nesse caso, a partir da estimação da SNR do canal, o sistema LTE utiliza um canal de controle para informar ao usuário qual o tipo de modulação que deverá ser adotada: BPSK, QPSK, 16-QAM ou 64-QAM [Ghosh et al. 2007].
Para que as técnicas de modulação adaptativa funcionem, é necessário que o receptor identifique o tipo de modulação empregada pelo transmissor. Tradicionalmente, o tipo de modulação utilizada pelo transmissor é informada ao receptor por sinalização explícita. Porém, como as características dos canais de comunicação sem fio podem variar significa-tivamente com o tempo, o tipo de modulação mais apropriada deve ser ajustada de acordo com a qualidade instantânea do canal. Consequentemente, pode ser necessário utilizar a sinalização com muita frequência. Além disso, como a informação da sinalização é essen-cial para que ocorra a demodulação, a própria sinalização precisar estar protegida contra condições adversas do canal de comunicação. Sendo assim, a sinalização costuma utilizar modulações e esquemas de codificação de canal mais robustos do que os aplicados aos dados.
Apesar da simplicidade, o uso da sinalização possui como desvantagem a redução na eficiência da largura de banda. Esse desperdício pode se tornar significativo, por exemplo, em sistemas OFDM, onde potencialmente cada subportadora necessitará de uma sinaliza-ção própria [Faezah & Sabira 2009]. Uma forma de eliminar ooverheadde sinalização é através da classificação automática de modulações (AMC), onde o receptor poderia iden-tificar de maneira cega a modulação do transmissor, derivando essa informação apenas dos símbolos dos dados recebidos e com o mínimo de informaçãoa priori.
CAPÍTULO 1. INTRODUÇÃO 8
As primeiras arquiteturas de AMC foram concebidas para resolver problemas bastante específicos como, por exemplo, distinguir a ordem da modulação (BPSK, QPSK e 8-PSK) de um enlace de comunicação por satélite [Umebayashi et al. 2005]. Contudo, no ambiente de rádios cognitivos, onde há uma grande variedade de potenciais modulações, a classificação de modulações tem se tornado um problema cada vez mais complexo.
Tradicionalmente, as arquiteturas de AMC costumam ser divididas em duas etapas: pré-processamento e classificação [Dobre et al. 2005]. Na etapa de classificação, os algo-ritmos de AMC possuem duas abordagens principais: as baseadas em verossimilhança ( li-kelihood) [Chavali & da Silva 2011] e as baseadas em características (assinaturas) [Dobre et al. 2007]. Já o pré-processamento a ser realizado depende do algoritmo de classificação utilizado na segunda etapa.
Na primeira abordagem de classificação, a função de verossimilhança é calculada para cada modulação candidata, ou seja, é um problema de teste de múltiplas hipóteses. Na abordagem de classificação baseada em verossimilhança é possível obter um desempe-nho de classificação ótimo, caso todas as informações necessárias estejam disponíveis no sinal analisado. Entretanto, essa abordagem não somente possui elevada complexidade computacional, o que dificulta sua aplicação em sistemas de tempo real, mas também se mostra pouco robusta a adversidades como deslocamento de fase e frequência, bem como erros de temporização [Swami & Sadler 2000].
A segunda abordagem baseia-se na extração de características capazes de diferenciar as modulações empregadas no sistema. Apesar da abordagem baseada em características somente possibilitar a obtenção de resultados subótimos, a eficiência computacional é maior e os classificadores tendem a ser mais resistentes às divergências entre os modelos teóricos e as condições reais do sinal.
Entre as técnicas aplicadas na extração de características, podem ser citadas as estatís-ticas de amplitude, fase e frequência instantâneas [Nandi & Azzouz 1998], a magnitude de pico da transformada wavelet [Ho et al. 2000], os cumulantes [Soliman & Hsue 1992], as medidas de teoria da informação (correntropia) [Fontes et al. 2012], e a cicloestacio-nariedade [Ramkumar 2009]. Neste trabalho, a arquitetura de classificação utiliza carac-terísticas cicloestacionárias do sinal para distinguir o tipo de modulação utilizada.
Arquiteturas das mais variadas já foram propostas para classificar assinaturas de sinais cicloestacionários. Em [Headley et al. 2008] uma rede neural é empregada para realizar tanto sensoriamento, quanto classificação. Já a arquitetura proposta em [Fehske et al. 2005] também emprega uma rede neural, porém seu foco é na classificação dos sinais modulados AM, BPSK, FSK, MSK e QPSK a partir dos seus perfis-alfa.
CAPÍTULO 1. INTRODUÇÃO 9
classificados por meio de uma arquitetura híbrida de duas camadas, que combina modelos ocultos de Markov (HMM - Hidden Markov Model ) e máquinas de vetor de suporte (SVM Support Vector Machine) [Petrova et al. 2010]. A primeira camada é composta por cinco HMMs, especializados em cada uma das modulações investigadas. Então, são selecionadas as duas classes de maior probabilidade de se enquadrar o sinal avaliado. A segunda camada é composta de classificadores SVM especializados em diferenciar pares dessas modulações. Isto é, um SVM capaz de diferenciar entre AM e BPSK, outro SVM capaz de diferenciar entre AM e FSK, e assim sucessivamente. Enquanto a primeira camada, de HMM, é utilizada para definir as duas classes mais prováveis, a segunda camada, de SVM, decide a qual dessas duas classes o sinal de entrada pertence. Os resultados obtidos são, então, comparados com arquiteturas semelhantes [Kim et al. 2007, Fehske et al. 2005].
A arquitetura proposta por [Liu et al. 2008] também emprega uma classificação em duas etapas. Essencialmente, ele se fundamenta no fato das características cicloestacioná-rias de alguns tipos de modulações serem bem mais resistentes ao ruído (AM e FSK) do que outras (BPSK, MSK e QPSK). Se o classificador SVM da primeira etapa classificar o sinal como pertencente a alguma das classes mais suscetíveis ao ruído, as características desse sinal passam a ser avaliadas pela segunda etapa do classificador. Na segunda etapa, a etapa de validação ocorre verificando-se a quantidade e localização das características cicloestacionárias, ou seja, os impulsos no perfil-alfa. Os resultados obtidos são, então, comparados com aqueles apresentados em [Fehske et al. 2005].
Enquanto diversas arquiteturas [Headley et al. 2008, Kim et al. 2007, Fehske et al. 2005, Liu et al. 2008] utilizam o perfil-alfa como redutor de dimensionalidade das carac-terísticas cicloestacionárias obtidas pela função densidade espectral cíclica (SCD), apre-sentada na Seção 2.3, a arquitetura proposta por [Jang et al. 2011] utiliza outra abordagem. Em [Jang et al. 2011], a redução de dimensionalidade é feita através daAnálise de Com-ponentes Principais(PCA). Após esse procedimento, os resultados obtidos pela aplicação da PCA à SCD do sinal de entrada são comparados com os resultados previamente obtidos comtemplatesdisponíveis no classificador.
Além dos trabalhos já citados, a cicloestacionariedade também tem sido aplicada com sucesso em classificação de sinais OFDM [Al-Habashna et al. 2012, Zhang et al. 2013] e em canais com desvanecimento [Sutton et al. 2007, Dobre, Abdi, Bar-Ness & Su 2010, Mossa & Jeoti 2010]. Por fim, trabalhos recentes apontam que técnicas de amostragem compressivapodem ser utilizadas em arquiteturas de classificação de sinais cicloestacio-nários [Tian et al. 2012, El Khamy et al. 2012].
CAPÍTULO 1. INTRODUÇÃO 10
de sensoriamento espectral e classificação do sinal modulado no mesmo sistema. Por exemplo, na arquitetura proposta em [Headley et al. 2008], calcula-se o perfil-alfa do sinal de entrada. Feito isso, uma mesma rede neural classifica a assinatura dentre cinco classes possíveis: as modulações BPSK, FSK, MSK e QPSK; ou apenas ruído. Esse processo ocorre de forma distribuída, onde cada rádio possui um classificador local que envia a decisão local a um decisor global, chamado de centro de fusão, que decide a qual classe pertence o sinal sensoriado. O conjunto de treinamento da rede é composto por perfis-alfa obtidos de sinais em um canal AWGN com nível de SNR entre −2 e 5 dB, enquanto a validação considera sinais com níveis de SNR de 0 e−2 dB.
Já em [Kim et al. 2007] essas etapas são realizadas separadamente. De início, o sis-tema verifica se o perfil-alfa da assinatura do sinal sensoriado apresenta impulsos com amplitude maior que um determinado limiar. Caso positivo, é declarada a presença de um sinal no canal sensoriado e o perfil-alfa é encaminhado ao classificador. Nessa etapa, há um classicador do tipo Modelo Oculto de Markov(HMM) [Choi & Hossain 2013] trei-nado para identificar cada uma das modulações suportadas: AM SSB-SC, BPSK, BFSK, MSK e QPSK. No cenário de avaliação, o classificador foi treinado com perfis-alfa de si-nais ideais (sem ruído). A validação é realizada sobre um canal AWGN com SNR limitada a−3 dB, sendo investigada a influência do tempo de observação na taxa de classificação do sistema.
Os diferentes esquemas de modulação podem apresentar características cicloestaci-onárias de segunda ordem ou de ordem superior. Enquanto as modulações investigadas em [Headley et al. 2008] e [Kim et al. 2007] exibem cicloestacionariedade de segunda ordem, outros tipos de modulações, notadamente a QAM, somente podem ser diferencia-das utilizando-se cicloestacionariedade de alta ordem [Renard et al. 2010]. Partindo dessa ideia, [Dobre, Inkol & Rajan 2010] utiliza uma árvore de decisão capaz de classificar si-nais do tipo AM, ASK, FSK, PSK, QAM e OFDM; além de identificar se esse sinal é apenas ruído.
Inicialmente, a arquitetura descrita em [Dobre, Inkol & Rajan 2010] verifica se o si-nal de entrada apresenta cicloestacionariedade de primeira ordem; se sim, é aplicada uma estatística de teste capaz de diferenciar os sinais AM e FSK. Se não apresentar cicloesta-cionariedade de primeira ordem, verifica-se se ele apresenta a de segunda ordem (no caso, o sinal OFDM). Em último caso, é aplicada a cicloestacionariedade de alta ordem, capaz de extrair características dos sinais ASK, PSK e QAM. Caso o sinal não seja de nenhum desses tipos, é declarada a ausência de sinais modulados.
CAPÍTULO 1. INTRODUÇÃO 11
realiza o sensoriamento espectral e, caso seja detectado um sinal OFDM, o classificador utiliza informações como preâmbulos e pilotos para definir se esse sinal OFDM é carac-terístico do padrão LTE ou do padrão WiMAX.
1.3
Organização do Texto
Esse trabalho é organizado como descrito a seguir.
No Capítulo 2 se define um sinal cicloestacionário e são definidas as principais fun-ções da análise cicloestacionária: a função de autocorrelação cíclica (CAF) e a função densidade espectral cíclica (SCD). Também apresenta o perfil-alfa e o algoritmo utilizado na obtenção das características cicloestacionárias, ocyclic periodogram detection(CPD). O Capítulo 3 detalha a paralelização do algoritmo CPD e descreve uma assinatura cicloestacionária denominada de perfil-alfa reduzido. Além disso, são propostas arquite-turas para sensoriamento espectral e classificação de modulações, que utilizam, respecti-vamente, o CPD paralelo e o perfil-alfa reduzido.
No Capítulo 4 são apresentados os resultados despeedupe eficiência do CPD paralelo, a probabilidade de detecção para sinais BPSK e QPSK, e a curva ROC da arquitetura de sensoriamento. Adicionalmente, a taxa de acerto da arquitetura de classificação é avaliada para as modulações AM, BPSK, QPSK, MSK e FSK.
Capítulo 2
Teoria da Cicloestacionariedade de
Sinais Aleatórios
Neste capítulo serão apresentados os fundamentos gerais da teoria da cicloestacionari-edade, com ênfase nas suas principais funções: a função de autocorrelação cíclica (CAF) e a função densidade espectral cíclica (SCD). Também serão abordados os conceitos de frequência cíclica e espectro cíclico.
A teoria da cicloestacionariedade tem sido utilizada em diversos campos das engenha-rias. Em telecomunicações, especialmente no contexto de rádios cognitivos, as caracterís-ticas cicloestacionárias, também chamadas de assinaturas, combinam a possibilidade de aplicação em dois tipos de problemas: sensoriamento espectral e classificação de sinais modulados.
2.1
Processos Cicloestacionários
Um processo aleatório, x(t), é chamado de cicloestacionário de segunda ordem em sentido amplo1caso a sua média,E{x(t)}, e a sua função de autocorrelação,
Rx(t,τ),E{x(t+τ)x(t)}, (2.1)
sejam periódicas com um certo períodoT0[Gardner et al. 2006]. Isto é, para quaisquer
va-lores deteτ, a média e a função de autocorrelação podem ser expressas, respectivamente, como
E{x(t+T0)}=E{x(t)} (2.2)
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS13
e
Rx(t+T0,τ) =Rx(t,τ). (2.3)
2.2
Função de Autocorrelação Cíclica (CAF)
Uma vez que os processos cicloestacionários apresentam periodicidade na função de autocorrelação, a Equação (2.3) pode ser expressa como uma série de Fourier [Gardner et al. 2006, Gardner 1990a]
Rx(t,τ) =
∑
αRα
x(τ)ej2παt, (2.4)
com os coeficientes de Fourier,Rα
x(τ), dados por
Rα x(τ),
1
T0 Z T0/2
−T0/2
Rx(t,τ)e−j2παtdt. (2.5)
Esses coeficientes são conhecidos porfunção de autocorrelação cíclicaeα={n/T0}n∈Z é chamada defrequência cíclicado sinal.
Caso o sinal analisado apresente mais do que uma frequência cíclica fundamental, ou seja, mais de um valor de α para os quais Rαx(τ)6≡0, o processo é chamado de
po-licicloestacionário. Entretanto, quando essa distinção não for importante, os proces-sos policicloestacionários podem ser referidos, simplesmente, como cicloestacionários [Gardner 1994].
Considerando os processos policicloestacionários, a Equação (2.5) precisa ser genera-lizada. Nesse caso, a seguinte modificação da CAF é necessária [Gardner 1990a, Gardner et al. 2006]:
Rα
x(τ),Tlim→∞
1
T
Z T/2
−T/2Rx(t,τ)e
−j2παtdt. (2.6)
Na análise cicloestacionária, a CAF pode ser interpretada como a função que per-mite verificar se um processo apresenta cicloestacionariedade, o que se observa quando a funçãoRα
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS14
2.3
Função Densidade Espectral Cíclica (SCD)
Um conceito importante utilizado em processamento de sinais é o que relaciona a densidade espectral de potência e a função de autocorrelação. Essa relação, descrita no
teorema de Wiener-Khinchin, enuncia que a densidade espectral de potência no domínio da frequência, Sx(f), pode ser obtida a partir da transformada de Fourier da função de
autocorrelação de um sinal aleatório, ou seja,
Sx(f) = Z ∞
−∞Rx(
τ)e−j2πfτdτ. (2.7)
Uma extensão desse teorema é aRelação Cíclica de Wiener-Khinchin[Gardner 1991] ou Relação de Gardner [Napolitano 2012], que define a função densidade espectral cíclica, Sα
x(f), como sendo a transformada de Fourier da função de autocorrelação
cí-clica, Rα
x(τ). Portanto, a SCD, também conhecida porespectro cíclico, é definida como
[Gardner et al. 2006]
Sα x(f),
Z ∞
−∞R α
x(τ)e−j2πfτdτ. (2.8)
Pode-se observar que a função SCD apresenta as propriedades de simetria [Gardner 1988b, Cap. 11]
S−α
x (f) =Sαx(f)∗e (2.9)
Sα
x(−f) =Sxα(f), (2.10)
onde∗denota o conjugado complexo.
A SCD e a CAF são as principais funções empregadas no estudo de sinais cicloestaci-onários. Enquanto a CAF permite identificar a presença de características cicloestacioná-rias nos sinais, a SCD permite extrair essas características. No contexto de rádios cogni-tivos, a CAF geralmente costuma ser aplicada em problemas de sensoriamento espectral. Por sua vez, a SCD pode ser aplicada tanto em problemas de sensoriamento espectral, quanto na classificação de sinais modulados [Ramkumar 2009, Da Silva et al. 2008].
2.4
Estimação da Função SCD: Periodograma Cíclico
Os principais métodos de estimação da SCD são derivados doperiodograma cíclico,
Iα
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS15
Iα
x(t,f),
1
TXT(t,f)X
∗
T(t,f−α), (2.11)
ondeXT(t,f) é a transformada de tempo curto de Fourier (short-time Fourier transform
- STFT), também chamada de transformada de Fourier variante no tempo, para um seg-mento de dados de compriseg-mentoT, no instantete analisado na frequência f, sendo dada por [Gardner et al. 2006]
XT(t,f),
Z t+T/2
t−T/2 x(s)e
−j2πf sds. (2.12)
O períodograma cíclico,Iα
x(t,f), é um estimador não-polarizado (unbiased), mas
não-consistente2, para a SCD. Entretanto, é possível obter um estimador consistente para a SCD por suavização em frequência ou por suavização no tempo do periodograma cíclico [Roberts et al. 1991]. A operação de suavização visa reduzir os efeitos do ruído e do tempo de observação finito no sinal analisado [Gardner et al. 2006].
O primeiro tipo de estimador consistente, chamado de periodograma cíclico suavi-zado em frequência,Sα
XT(t0,f)∆f, é denotado por [Gardner et al. 2006]
Sα
XT(t0,f)∆f ,
1 ∆f
Z f+∆f/2
f−∆f/2
1
TXT(t0,λ)X
∗
T(t0,λ−α)dλ. (2.13)
De maneira análoga, mas por meio da suavização no tempo, obtém-se operiodograma cíclico suavizado no tempo,Sα
X1/∆f(t,f)T, expresso por [Gardner et al. 2006]
Sα
X1/∆f(t,f)T ,
1
T
Z t+T/2
t−T/2 ∆f X1/∆f(s,f)X ∗
1/∆f(s,f−α)ds. (2.14)
Mais precisamente, para se estimar a SCD a partir dos periodogramas cíclicos suavi-zados no tempo ou em frequência, é necessário que ∆f →0 e T →∞, isto é [Gardner et al. 2006, Ramkumar 2009]:
Sα
x(f) = ∆limf→0Tlim→∞SαX1/∆f(t,f)T (2.15)
= lim
∆f→0Tlim→∞S α
XT(t,f)∆f. (2.16)
2Um estimador consistente é aquele que, a partir de uma quantidade arbitrariamente grande de amostras,
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS16
Pode-se observar que∆f representa a resolução em frequência,∆α=1/T é a
resolu-ção em frequência cíclica eT é o tempo de correlação.
2.5
Cicloestacionariedade de Ordem Superior
Alguns tipos de modulação apresentam as mesmas características cicloestacionárias de segunda ordem, não sendo possível, neste caso, diferenciá-los. Por exemplo, as modu-lações M-PSK (paraM>4) e QAM, e as modulações ASK e BPSK [Gardner 1991, Agee et al. 1990]. Para diferenciar essas modulações, é preciso utilizar as funções de análise cicloestacionária de ordem superior [Gardner 1990b, Dobre et al. 2003, Like et al. 2009]. A primeira dessas funções é chamada de cyclic temporal cross-moment functions
(CTCMF) de ordem N, definida como [Gardner et al. 2006, Like et al. 2009]
Rα
xxx(τττ),E
( N
∏
k=1x(∗)k
k (t+τk)e−j2παt
)
, (2.17)
onde(∗)kdenota a conjugação complexa do sinalxk(t)eτττ= [τ1, . . . ,τN]T não é
identica-mente nulo. CasoRα
xxx(τττ)não seja identicamente nula para algum valor de α6=0, diz-se
que as N séries temporais apresentam cicloestacionariedade conjunta de N-ésima ordem no sentido amplo.
Já a função temporal cross-moment function(TCMF) de ordem N é definida como [Gardner et al. 2006, Spooner & Gardner 1991]
Rxxx(t,τττ),
∑
αRα
xxx(τττ)ej2παt. (2.18)
Finalmente, pode-se definir a função cyclic spectral cross-moment (CSCMF) de or-dem N como sendo a tranformada de Fourier N-dimensional da função TCMF de oror-dem N [Gardner et al. 2006], ou seja,
Sα xxx(fff) =
Z
RNR
α
xxx(τττ)e−j2πfff Tτ
dτττ, (2.19)
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS17
2.6
Perfil-Alfa e Perfil-Alfa Reduzido
A função SCD permite extrair assinaturas características de sinais modulados, as quais variam conforme o tipo de modulação utilizada. Por exemplo, a Figura 2.1 mostra a su-perfície sobre o plano (f,α) resultante da função SCD de um sinal modulado BPSK.
Porém, o uso direto dessa superfície de características para a classificação de sinais exigi-ria classificadores muito complexos. Sendo assim, é necessário empregar algum método de redução de dimensionalidade a essa superfície.
Figura 2.1: Assinatura da modulação BPSK obtida através da função SCD. Conforme expresso em (2.10), a superfície resultante da função SCD é simétrica em
f, isto é,Sα
x(−f) =Sxα(f). Além dessa propriedade, outro método utilizado na redução
de dimensionalidade da SCD consiste em calcular uma projeção dos valores máximos da SCD sobre um plano ortogonal a f, para valores de α≥0. Dessa forma, é possível reduzir a complexidade da representação da SCD de três dimensões para apenas duas, preservando-se os impulsos utilizados no sensoriamento espectral e na classificação dos sinais. Essa projeção é chamada deperfil-alfa[Fehske et al. 2005, Liu et al. 2008, Headley et al. 2008, Kim et al. 2007] e está exemplificada na Figura 2.2 para um sinal modulado BPSK.
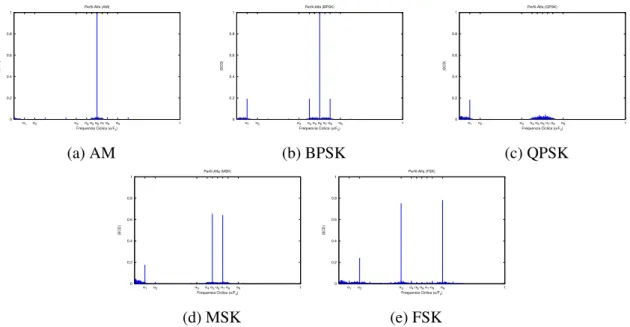
As técnicas de sensoriamento espectral por cicloestacionariedade se baseiam no surgi-mento de impulsos no perfil-alfa. Isto é, caso o perfil-alfa do sinal analisado não apresente qualquer impulso, o canal é considerado desocupado. Contudo, se o perfil-alfa calculado apresentar algum impulso, então há algum sinal modulado no canal. Adicionalmente, uma vantagem da análise cicloestacionária é que a localização e a amplitude dos impul-sos no perfil-alfa podem diferenciar o tipo de modulação do sinal, conforme observado na Figura 2.3, onde estão ilustrados os perfis-alfa obtidos de sinais que empregam as modulações AM, BPSK, QPSK, MSK e FSK3.
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS18 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
|SCD|
Frequencia Ciclica (α/Fs)
Perfil-Alfa (BPSK)
Figura 2.2: Perfil-alfa da modulação BPSK.
2.7
Algoritmo
Cyclic Periodogram Detection
(CPD)
A partir da teoria de estimação da função SCD, foi desenvolvido o algoritmo Cyclic Periodogram Detectionem [Zhang & Xu 2007]. Em nosso trabalho, o algoritmo CPD é utilizado na obtenção das assinaturas cicloestacionárias dos experimentos realizados.
O algoritmo CPD pode ser descrito por meio dos seguintes passos: 1. O sinal de entrada é segmentado emLblocos deN amostras;
2. Dado o sinalxl[n], ondel=0,1, . . . ,L−1 identifica os blocos en=0,1, . . . ,N−1
identifica as amostras nos blocos, calcula-se a transformada discreta de Fourier de cada um dosLblocos, ou seja,
Xl[k] = N−1
∑
n=0xl[n]e−j 2π
Nkn,k=0,1, . . . ,N−1; (2.20)
3. Calcula-se a seguinte expressão parak=0,1, . . . ,N−1 el=0,1, . . . ,L−1:
Tα l [k] =
1
NXl
h
k+α
2 i
X∗ l
h
k−α 2 i
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS19 0 0.2 0.4 0.6 0.8 1
α1 α2 α3 α4α5α6α7α8 α9 1
|SCD|
Frequencia Ciclica (α/Fs) Perfil-Alfa (AM) (a) AM 0 0.2 0.4 0.6 0.8 1
α1 α2 α3 α4α5α6α7α8 α9 1
|SCD|
Frequencia Ciclica (α/Fs) Perfil-Alfa (BPSK) (b) BPSK 0 0.2 0.4 0.6 0.8 1
α1 α2 α3 α4α5α6α7α8 α9 1
|SCD|
Frequencia Ciclica (α/Fs) Perfil-Alfa (QPSK) (c) QPSK 0 0.2 0.4 0.6 0.8 1
α1 α2 α3 α4α5α6α7α8 α9 1
|SCD|
Frequencia Ciclica (α/Fs) Perfil-Alfa (MSK) (d) MSK 0 0.2 0.4 0.6 0.8 1
α1 α2 α3 α4α5α6α7α8 α9 1
|SCD|
Frequencia Ciclica (α/Fs) Perfil-Alfa (FSK)
(e) FSK
Figura 2.3: Perfis-alfa das modulações AM, BPSK, QPSK, MSK e FSK
4. Calcula-se o valor médio deTα
l [k]sobre todos osLblocos:
Tα[k] = 1
L
L−1
∑
l=0Tα
l [k],k=0,1, . . . ,N−1; (2.22)
5. Suaviza-se o resultado deTα no domínio da frequência obtendo, então, o
periodo-grama cíclico:
Sα[k] = 1
M
M−1
∑
m=0Tα[kM+m]. (2.23)
Isto é, o algoritmo CPD tem como entrada o sinal que se deseja analisar e possui três parâmetros principais: L, N eM. O parâmetroL representa a quantidade de blocos em que o sinal de entrada será dividido; quanto maior o valor de L, mais precisa será a assinatura cicloestacionária e maior o custo computacional do algoritmo. O segundo parâmetro,N, é o tamanho de cada um dosLblocos; quanto maior o tamanho dos blocos, melhor a resolução da assinatura, porém a quantidade de memória e custo computacional também serão maiores. Finalmente, o parâmetroMé o fator de suavização em frequência, um parâmetro que ajuda a evidenciar os impulsos característicos das assinaturas de sinais com muito ruído.
CAPÍTULO 2. TEORIA DA CICLOESTACIONARIEDADE DE SINAIS ALEATÓRIOS20
Capítulo 3
Cicloestacionariedade Aplicada a
Sensoriamento Espectral e a
Classificação de Modulações
Com o aumento da demanda por sistemas de comunicação sem fio, os rádios cog-nitivos surgem como uma alternativa capaz de oferecer uma maior largura de banda ao utilizar de forma mais eficiente o espectro de rádio. Assim, nesse ambiente, os parâmetros de transmissão e recepção dos usuários ajustam-se continuamente, tanto para tornar mais eficiente o uso do canal, quanto para evitar interferência nos usuários primários.
Uma ferramenta que se mostra promissora no ambiente de rádios cognitivos é a aná-lise dos padrões cicloestacionários que surgem a partir de operações típicas nos sinais de comunicação, tais como amostragem, modulação, multiplexação e codificação. Por meio da análise cicloestacionária, é possível obter alguns desses padrões, também chamados de assinaturas, que podem ser empregados tanto no sensoriamento espectral, quanto na clas-sificação automática de modulações(AMC). Isto é, ao contrário de diversas estratégias que apenas podem ser aplicadas em problemas de sensoriamento espectral ou apenas em AMC, a cicloestacionariedade pode ser utilizada para resolver ambos os tipos de tarefas [Ramkumar 2009].
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 22
3.1
Algoritmo
Cyclic Periodogram Detection
(CPD)
Para-lelo
A análise cicloestacionária, apesar de se mostrar bastante robusta, possui como princi-pal desvantagem a sua elevada complexidade computacional, especialmente quando com-parada, por exemplo, aos métodos convencionais de estimação da densidade espectral de potência. Visando reduzir essa complexidade, foram propostos algoritmos mais eficientes para estimação da SCD, tais como oFFT Accumulation Method (FAM) e o Strip Spec-tral Correlation Algorithm(SSCA) [Roberts et al. 1991, Brown & Loomis 1993]. Outra possível abordagem, apresentada em [Wang et al. 2010, Roberts & Loomis 1995], indica a possibilidade de paralelizar os métodos de estimação da SCD.
Neste trabalho foi desenvolvida uma versão paralelizada do algoritmo CPD [Lima et al. 2014], visando aproveitar de forma mais eficiente o poder computacional disponível nos processadores multi-core, presentes, inclusive, nos dispositivos móveis modernos. Ou seja, com o desenvolvimento do algoritmo CPD paralelo é possível reduzir o tempo computacional necessário para calcular as assinaturas cicloestacionárias.
A computação paralela tem se mostrado essencial em diversas áreas da ciência e enge-nharia. Podem ser citados os trabalhos de paralelização da FFT [Duy & Ozaki 2014, Ayala & Wang 2013, Hinitt & Kocak 2010, Franchetti et al. 2009], reconhecimento automático de padrões típicos de processamento de sinais [Shafiee Sarvestani et al. 2013], análise de sinais e imagens no domínio wavelet [Blazewicz et al. 2012, Bernabe et al. 2007], pro-cessamento de imagem e vídeo [Li et al. 2010], integração entre GPU e plataformas de SDR [Bang et al. 2014, Horrein et al. 2012, Kim, Hyeon & Choi 2010, Kim, Lee & Chen 2010], aplicações em sistemas de comunicação do tipo MIMO [Wu et al. 2011, Fasthuber et al. 2011] e decodificação de códigos corretores de erros [Ji et al. 2011].
O algoritmo CPD paralelo foi implementado utilizando a linguagem de programação C, juntamente com a interface de programação de aplicativos (Application Program Inter-face- API)Open Multi-Processing(OpenMP) [Chapman et al. 2008]. O OpenMP é um padrão para programação paralela que se caracteriza pela eficiência, uso amigável e por-tabilidade entre plataformas. A distribuição de carga entre asthreadse o gerenciamento de posições de memórias privadas e compartilhadas são controladas pelo uso de diretivas de compilação (no formato #pragma omp <diretiva> [cláusula1, ...]. Uma das
principais diretivas é afor, que determina que as iterações do loop subsequente deverão
ser executadas paralelamente entre asthreads1.
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 23
Uma configuração essencial na paralelização dos laços está na distribuição do traba-lho entre asthreads, o que é chamado de escalonamento. Os laços paralelos podem ser configurados para utilizar um escalonamento do tipo static, dynamic ouguided. No
escalonamento do tipostatic, a distribuição de trabalho é definida pelo OpenMP antes
do início do laço. Enquanto nos tiposdynamiceguided, essa distribuição acontece
dina-micamente durante a execução do laço. A diferença entre eles é que odynamicdivide os
pedaços de tarefas (chunks) igualmente entre as threads. Já com oguided, o laço começa
comchunksde maior tamanho e que são reduzidos ao longo das iterações. A configura-ção apropriada dos escalonamentos empregados em cada laço é, portanto, essencial para obter o máximo desempenho do algoritmo paralelo [Ayguade et al. 2003].
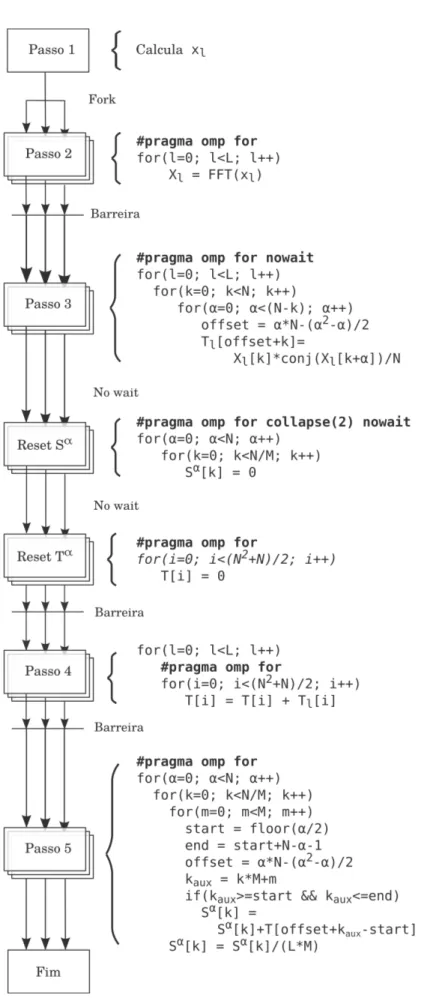
A estratégia de paralelização adotada para o algoritmo CPD encontra-se ilustrada na Figura 3.1, onde os passos mencionados no diagrama correspondem àqueles descritos na Seção 2.7. A paralelização do algoritmo, propriamente, ocorre após o primeiro passo. No diagrama, os blocos sobrepostos representam a carga computacional e as setas indicam as
threadsem execução. As barreiras são empregadas como ponto de sincronização global entre as threads, isto é, cada thread aguarda a finalização das tarefas das demais para, somente então, prosseguir com a execução do algoritmo. O balanceamento de carga é realizado com o escalonamento de Nload blocos computacionais entre Nthreads threads,
comNload≥Nthreads.
O passo 1 consiste na atribuição de ponteiros locais, xl, para l = 0,1, . . . ,L−1, a
cada um dosL blocos. Devido a baixa complexidade computacional, esse passo é feito serialmente. Após esse passo, a diretiva parallel é empregada para criar uma região
paralela, isto é, um bloco de código executado por múltiplasthreads. A criação da região paralela é representada peloForkna Figura 3.1.
No passo 2, a transformada discreta de Fourier é aplicada paralelamente a cada um dos
Lblocos usando aFastest Fourier Transform in the West2[Frigo & Johnson 2005], resul-tando emLvetores,Xl,l=0,1, . . . ,L−1. Por padrão, a diretivaforpossui uma barreira
implícita, isto é, o algoritmo somente prosseguirá quando todas asthreadsfinalizarem as tarefas daquele laço.
O passo 3 é o que possui o maior custo computacional do algoritmo. Cada thread
calcula sua respectiva SCD parcial,Tα
l , como descrito na equação 2.21, onde os valores
não-nulos são definidos no intervalo−(N−α)/2≤k≤(N−α)/2−1, de forma similar a um triângulo. Na implementação do algoritmo CPD paralelo, a função SCD foi represen-tada como uma estrutura de dados unidimensional e contígua com tamanho(N2+N)/2,
chamada deTl. O mapeamento do αoriginal nessa estrutura de dados foi realizado com
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 24
o auxílio da variáveloffset.
Para evitar a ocorrência de overhead, duas configurações foram importantes: a
cláu-sulanowait, evitando a barreira implícita padrão ao final do laço paralelo; e a
iniciali-zação, em laços distintos, dos vetoresTα eSα entre os passos 3 e 4, aproveitando-se do
desbalanceamento de carga que potencialmente pode ocorrer ao final do passo 3.
No passo 4, é realizada uma média entre asLSCDs parciais. Para isso, osL blocos são percorridos serialmente e a paralelização ocorre ao longo dos blocos.
Já no passo 5, a suavização no eixo da frequência é realizada pela paralelização do domínioαentre asthreads.
Finalmente, o algoritmo foi configurado para utilizar os seguintes escalonamentos: o passo 2 e a inicialização do vetorSαsão do tipodynamic; o passo 4 éstatic; e os passos
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 25
Fim
#pragma omp for nowait
for(l=0; l<L; l++) for(k=0; k<N; k++)
for(α=0; α<(N-k); α++)
offset = α*N-(α2-α)/2
Tl[offset+k]=
Xl[k]*conj(Xl[k+α])/N
Passo 3
#pragma omp for
for(l=0; l<L; l++)
Xl = FFT(xl)
Passo 2
#pragma omp for collapse(2) nowait
for(α=0; α<N; α++) for(k=0; k<N/M; k++)
Sα[k] = 0
Reset Sα
for(l=0; l<L; l++)
#pragma omp for
for(i=0; i<(N2+N)/2; i++)
T[i] = T[i] + Tl[i]
Passo 4 Barreira Fork No wait No wait Barreira Barreira
Calcula xl Passo 1
#pragma omp for
for(i=0; i<(N2+N)/2; i++)
T[i] = 0
Reset Tα
#pragma omp for
for(α=0; α<N; α++) for(k=0; k<N/M; k++) for(m=0; m<M; m++) start = floor(α/2) end = start+N-α-1
offset = α*N-(α2-α)/2
kaux = k*M+m
if(kaux>=start && kaux<=end)
Sα[k] =
Sα[k]+T[offset+kaux-start]
Sα[k] = Sα[k]/(L*M)
Passo 5
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 26
3.2
Arquitetura Proposta para Sensoriamento Espectral
Na arquitetura proposta para sensoriamento espectral, o algoritmo CPD paralelo é aplicado ao sinal analisado,y(n), com o objetivo de obter uma superfície de características
cicloestacionárias,Sα. Então, a partir da assinatura obtida, calcula-se o parâmetro de teste,
Λ, definido como
Λ=max(S α>0)
max(Sα=0). (3.1)
Vale observar que o valor máximo da superfície de características ocorre na frequência cíclica3 α=0, isto é, em Sα=0, o que limita o Λ ao intervalo [0,1]. Caso o parâmetro
de teste obtido seja menor do que o limiar pré-determinado4 (isto é, o valor crítico λ), aceita-se a hipótese nula,
H
0 (ausência do usuário primário). Caso contrário, rejeita-se ahipótese nula, decidindo-se pela presença do usuário primário (hipótese
H
1).CPD
Paralelo decisão
y(n) Filtro
Passa-Faixa
Figura 3.2: Diagrama de blocos da arquitetura proposta para sensoriamento por cicloestacionariedade.
3.3
Arquitetura Proposta para AMC
3.3.1
Introdução ao Perfil-Alfa Reduzido
Diversas arquiteturas de classificação de modulações por cicloestacionariedade uti-lizam o perfil-alfa como padrão para diferenciar modulações. Este trabalho, contudo, propõe a utilização de uma versão simplificada do perfil-alfa chamada deperfil-alfa redu-zido. Ao contrário do perfil-alfa, que é calculado para todo o espectro cíclico, o perfil-alfa reduzido é calculado apenas para um conjunto de frequências cíclicas específicas.
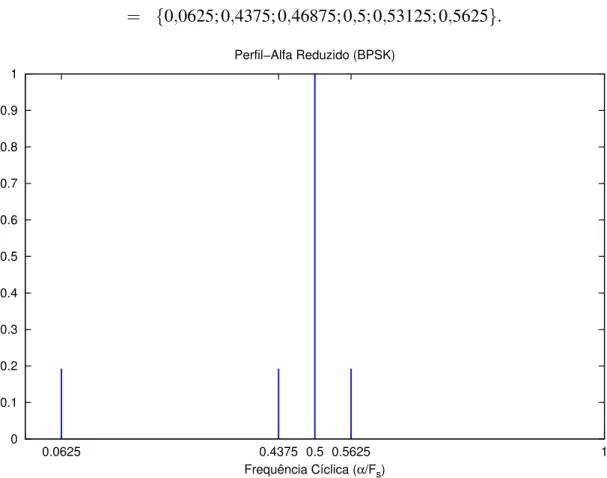
Para exemplificar a obtenção no perfil-alfa reduzido, serão utilizadas as modulações BPSK e MSK. No caso da modulação BPSK, a sua assinatura cicloestacionária se carac-teriza por impulsos localizados no conjunto de frequências cíclicas
αBPSK ={0,0625; 0,4375; 0,5; 0,5625}(α/Fs), conforme ilustrado na Figura 3.3. Por sua
vez, a modulação MSK se caracteriza por impulsos localizados no conjunto de frequên-cias cíclicas αMSK ={0,0625; 0,46875; 0,53125} (α/Fs), como pode ser observado na
3O que pode ser observado, para uma modulação BPSK, na Figura 2.1.
4O limiar é ajustado empiricamente a fim de se obter uma determinada probabilidade de falso alarme
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 27
Figura 3.4. Observa-se, portanto, que um classificador de modulações poderia diferenciar entre esses dois tipos de modulações utilizando apenas o seguinte conjunto reduzido de frequências:
αreduzido = αBPSK∪αMSK
= {0,0625; 0,4375; 0,46875; 0,5; 0,53125; 0,5625}.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.0625 0.4375 0.5 0.5625 1
Frequência Cíclica (α/F
s)
Perfil−Alfa Reduzido (BPSK)
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 28
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.0625 0.468 0.531 1
Frequência Cíclica (α/F
s)
Perfil−Alfa Reduzido(MSK)
Figura 3.4: Perfil-alfa reduzido da modulação MSK.
O perfil-alfa reduzido apresenta duas vantagens principais: é uma assinatura obtida em menor tempo computacional, além de poder ser utilizada em classificadores mais simples. A redução no tempo computacional para obtenção da assinatura ocorre porque o conjunto de frequências cíclicas necessárias para caracterizar a modulação é muito menor do que o espectro cíclico. Já a segunda vantagem está relacionada a probabilidade de surgirem impulsos espúrios na assinatura, isto é, de impulsos em frequências não associadas a qualquer modulação5, é bem menor no perfil-alfa reduzido, o que, consequentemente, reduz a complexidade no processo de classificação dessas assinaturas.
3.3.2
Perfis-Alfa Reduzidos da Arquitetura Proposta
Além de BPSK e MSK, neste trabalho também foram utilizadas as modulações AM, QPSK e FSK. As frequências cíclicas características de cada modulação avaliada são apresentadas na Tabela 3.1.
As frequências cíclicas calculadas neste trabalho são resultado da união dos conjuntos
5O surgimento dos impulsos espúrios ocorre na proporção do tempo de observação e da SNR do sinal
CAPÍTULO 3. CICLOEST. APLICADA À SENSORIAMENTO E AMC 29
Modulação Frequências Cíclicas (α/Fs)
αAM {0,5}
αBPSK {0,0625; 0,4375; 0,5; 0,5625} αQPSK {0,0625}
αMSK {0,0625; 0,46875; 0,53125} αFSK {0,125; 0,375; 0,625}
Tabela 3.1: Localização numérica dos impulsos característicos para cada tipo de modula-ção analisada na arquitetura proposta.
de frequências cíclicas de cada modulações, ou seja,
αreduzido = αAM∪αBPSK∪αQPSK∪αMSK∪αFSK (3.2)
= {0,0625; 0,125; 0,375; 0,4375; 0,46875; 0,5; 0,53125; 0,5625; 0,625}.
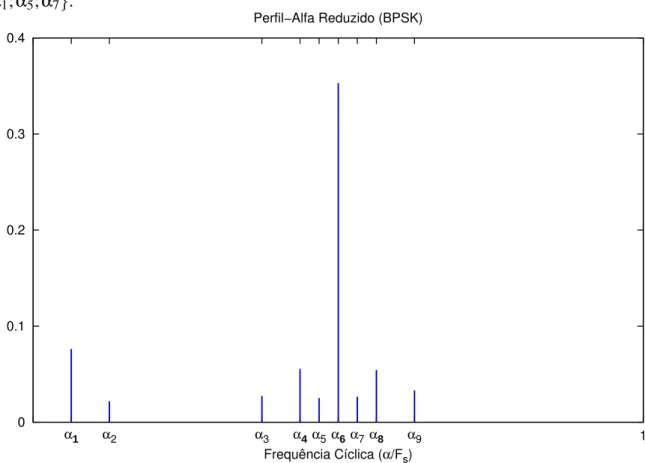
Para simplificar a notação, identificaremos as frequências cíclicas de αreduzido por
α1, . . . ,αn. Neste caso,α1=0,0625,α2=0,4375, . . . ,α9=0,5625. Portanto, o conjunto
αreduzido da Equação 3.2 pode ser apresentado mais genericamente, da seguinte forma:
αreduzido = αAM∪αBPSK∪αQPSK∪αMSK∪αFSK (3.3)
= {α1;α2;α3;α4;α5;α6;α7;α8;α9}. (3.4)
Sendo assim, as frequências cíclicas características de cada modulação analisada, indi-cadas numericamente na Tabela 3.1, podem ser descritas de forma genérica como na Tabela 3.2.
Modulação Frequências Cíclicas (α/Fs)
αAM {α6}
αBPSK {α1;α4;α6;α8}
αQPSK {α1}
αMSK {α1;α5;α7}
αFSK {α2;α3;α9}
Tabela 3.2: Localização genérica dos impulsos característicos para cada tipo de modula-ção analisada na arquitetura proposta.
As Figuras 3.5 e 3.6 ilustram o perfil-alfa reduzido a um nível de SNR de -6 dB para as modulações BPSK e MSK, respectivamente. Mesmo a esse nível de ruído, a tura mantém, ainda que com menor amplitude, seus impulsos característicos. A assina-tura da modulação possui impulsos evidentes nas frequências denominadas deαBPSK =