Dissipac¸˜ao no Modelo Fermi-Ulam
Fortaleza
Dissipac¸˜ao no Modelo Fermi-Ulam
Tese apresentada ao Curso de P´os-graduac¸˜ao em F´ısica da Universidade Federal do Cear´a como parte dos requisitos para a obtenc¸˜ao do T´ıtulo de Doutora em F´ısica.
Orientador:
Prof. Dr. Raimundo Nogueira da Costa Filho
Co-orientador:
Prof. Dr. Edson Denis Leonel
UNIVERSIDADEFEDERAL DOCEARA´ CENTRO DE CIENCIASˆ
DEPARTAMENTO DEF´ISICA CURSO DE P ´OS-GRADUAC¸ ˜AO EM F´ISICA
Fortaleza
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
"#$%&!'()*+(#,-%(#-&!$*!.#)#/%0#12%!(#!345/-,#12%! 6(-7*+&-$#$*!8*$*+#/!$%!.*#+9!
:-5/-%)*,#!$%!.4+&%!$*!8;&-,#! !
!
<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<! !
=>>?$!!!!!Sousa , "#(-/#!8*+(#($*& Tavares de!
!!!!!!!!!!!!!!!!!!!!!!!!"-&&-A#12%!(%!B%$*/%!8*+C-D6/#C!E!"#(-/#!8*+(#($*&!=#7#+*& de SousaF!8%+)#/*G#@!>HI>F!
!!!!!!!!!!!!!!!!!!!!!!!!IJ1!LFM!-/F!,%/%+F@!*(,FN!JH!,CF! !
!!!!!!!!!!!!!!!!!!!!!!!!=*&*!O"%4)%+#$%P!6(-7*+&-$#$*!8*$*+#/!$%!.*#+9@!.*()+%!$*!.-Q(,-#&@!"*A#+)#C*()%! !!!!!!!!!!!!!!!!!!$*!8;&-,#@!8%+)#/*G#@!>HI>F!
!!!!!!!!!!!!!!!!!!!!!!!!R+*#!$*!.%(,*()+#12%M!8;&-,#!S*+#/M!8;&-,#!./9&&-,#F! !!!!!!!!!!!!!!!!!!!!!!!!T+-*()#$%+M!3+%LF!"+F!U#-C4($%!V%04*-+#!$#!.%&)#!8-/W%F! !
!!!!!!!!!!!!!!!!!!!!!!!IF!8;&-,#!X&)#);&)-,#F! >F!Y-&)*C#&!"-(ZC-,%&F! 'F!=;)4/%F! !
Dissipação no Modelo Fermi-Ulam
Tese submetida à Coordenação do Curso de Pós-Graduação em Física, da Universidade Federal do Ceará, como requisito parcial para a obtenção do grau de Doutor em Física.
Aprovada em 17 / 02 / 2012
BANCA EXAMINADORA
____________________________________________________
Dr. Raimundo Nogueira da Costa Filho – Orientador
UFC
____________________________________________________
Dr. Edson Denis Leonel – Co-Orientador
UNESP
____________________________________________________
Dr. Wandemberg Paiva Ferreira
UFC
____________________________________________________
Dr. Ascânio Dias Araújo
UFC
_____________________________________________________
Dr. Juliano Antônio de Oliveira
UNESP
Ao meu orientador e amigo, Prof. Raimundo Nogueira da Costa Filho, meus sinceros agrade-cimentos n˜ao s´o pela orientac¸˜ao, mas pela confianc¸a, incentivo e amizade que fez a diferenc¸a ao longo do trabalho.
Ao meu Co-orientador, Prof. Edson Denis Leonel, pela confianc¸a e pelas valiosas discuss˜oes.
Ao Prof. Murilo, por me permitir usufruir das instalac¸˜oes do Laborat´orio de Simulac¸˜ao Num´erica e Rede de ´Oleos Pesados.
Aos membros da banca examinadora, pelas contribuic¸˜oes.
Aos amigos que conquistei ao longo desses quatro anos.
`
A minha fam´ılia pelo encorajamento e por me ajudar a suportar a saudade e a distˆancia.
`
A Deus, sem o qual n˜ao teria conseguido.
In this work, we revisit the Fermi accelerator model, also known as Fermi-Ulam model. This model consists of a classical particle of unitary mass wich is confined to bounce between two rigid walls. One of them is fixed and the other one is assumed to move periodically in time. The particle collisions with the walls are assumed to be elastic. The description of the dynamic is made everytime the particle collides with the moving wall, so that we know the particle’s time and velocity at each collision needed to describe the dynamic of the system. Two versions for this model are studied: the complete and the simplified versions. In the simplified version, two walls of the model are assumed to be fixed. The Fermi-Ulam model is a conservative model because it preserves area of the phase space. Our analytical and numerical results for this conservative model are presented and discussed. Some dynamical properties for a particle suffering the action of a drag force are obtained for a dissipative Fermi-Ulam model. The dissipation is introduced via a viscous drag force, like a gas, wich is assumed to be proportional to any power of the velocity, F =−ηVγ. The dynamics of the models are described by two dimensional nonlinear mappings obtained via the solution of the second Newtons’ law of motion. We prove analytically that the decay of high energy is given by a continued fraction wich recovers the following expressions: (i) linear for γ =1, (ii) exponential for γ=2 and (iii) second degree polynomial type forγ =1.5. For any value ofγ, the numerical results shows a polynomial behavior for the velocity decay. Our results are discussed for both the complete and simplified versions. The phase spaces and the basin of attraction for some values of γ are obtained. Complementing our studies on this dissipative version of the Fermi-Ulam model, a mixed model was proposed. In this model, one particle travels through two different media. It started in a medium with no dissipation lets say vacuum and at some point it enters a region with a dissipative medium. The dissipation is also introduced by a viscous drag force, such that F =−ηVγ. In particular, for the study of the mixed model we use
ξ posic¸ ˜ao da parede imaginaria dos modelos mistos´
η coef iciente de viscosidade
ǫ amplitude de oscilac¸ ˜ao do movimento da parede movel´
ω f requˆencia angular da parede movel´ w wall(denota parede movel´ )
l distˆancia entre a parede f ixa e a posic¸ ˜ao de equil´ıbrio da parede movel´
ε grandeza adimensional(amplitude de oscilac¸ ˜ao da parede movel´ )
φ grandeza adimensional(f ase da parede movel´ ) λ expoente de Lyapunov
ǫ0 distˆancia inf initesimal de uma condic¸ ˜ao inicial
γ expoente da velocidade da part´ıcula(∈ ℜ∗+)
1 Introduc¸˜ao p. 11
2 Modelo Fermi-Ulam Conservativo p. 17
2.1 Introduc¸˜ao . . . p. 17
2.2 Modelo Completo . . . p. 18
2.2.1 Mapeamento . . . p. 18
2.2.2 Matriz Jacobiana . . . p. 25
2.3 Modelo Simplificado . . . p. 28
2.3.1 Mapeamento . . . p. 28
2.3.2 Matriz Jacobiana . . . p. 30
2.4 Resultados Num´ericos . . . p. 30
2.4.1 Espac¸os de Fases . . . p. 30
2.4.2 Precis˜ao Num´erica . . . p. 34
2.4.3 Expoentes de Lyapunov . . . p. 35
3 Modelos Fermi-Ulam Dissipativos p. 41
3.1 Introduc¸˜ao . . . p. 41
3.2 Forc¸a Dissipativa Proporcional `a Velocidade da Part´ıcula: F =−V . . . p. 42 3.2.1 Modelo Completo . . . p. 42
3.2.2 Matriz Jacobiana . . . p. 46
3.2.3 Resultados Num´ericos para o Modelo Completo . . . p. 48
3.2.4 Modelo Simplificado . . . p. 52
3.3.1 Modelo Completo . . . p. 55
3.3.2 Matriz Jacobiana . . . p. 62
3.3.3 Resultados Num´ericos para o Modelo Completo . . . p. 64
3.3.4 Modelo Simplificado . . . p. 66
3.3.5 Matriz Jacobiana . . . p. 66
3.3.6 Resultados Num´ericos para o Modelo Simplificado . . . p. 67
4 Modelo Fermi-Ulam: Descric¸˜ao Gen´erica para um Caso Dissipativo p. 75
4.1 Introduc¸˜ao . . . p. 75
4.2 Modelo Completo . . . p. 76
4.2.1 Mapeamento . . . p. 76
4.2.2 Matriz Jacobiana . . . p. 83
4.2.3 Comportamento da Velocidade . . . p. 85
4.3 Modelo Simplificado . . . p. 87
4.3.1 Mapeamento . . . p. 87
4.3.2 Matriz Jacobiana . . . p. 88
4.3.3 Resultados Num´ericos para o Modelo Simplificado . . . p. 89
5 Modelos Fermi-Ulam Mistos p. 100
5.1 Introduc¸˜ao . . . p. 100
5.2 Modelo Misto 1: Regi˜ao Conservativa versus Regi˜ao Dissipativa comγ=1 . . p. 100
5.2.1 Modelo Completo . . . p. 101
5.2.2 Modelo Simplificado . . . p. 109
5.2.3 Resultados Num´ericos . . . p. 110
5.3 Modelo Misto 2: Regi˜ao Conservativa×Regi˜ao Dissipativa comγ =2 . . . . p. 113 5.3.1 Modelo Completo . . . p. 113
6 Conclus˜oes e Perspectivas p. 126
1
Introduc¸˜ao
Em todos os ramos da ciˆencia um dos conceitos centrais no entendimento dos fenˆomenos natu-rais ´e o de evoluc¸˜ao no tempo. A descric¸˜ao dinˆamica, na qual o tempo exerce o papel essencial de parˆametro de referˆencia, ´e utilizada nas mais variadas ´areas da f´ısica, da astronomia, da matem´atica
aplicada e da engenharia.
Com o sucesso da mecˆanica newtoniana onde a evoluc¸˜ao temporal dos sistemas ´e representada matematicamente pelas chamadas leis de Newton, estabeleceu-se um modelo b´asico constituindo o ponto de partida para o que se chama hoje de “teoria dos sistemas dinˆamicos”. Um sistema dinˆamico ´e descrito por qualquer conjunto de grandezas (chamadas vari´aveis dependentes) que
variam no tempo (vari´avel independente). O estado do sistema ´e representado pelos valores, num dado instante de tempo, do conjunto completo de vari´aveis dependentes. O espac¸o de estados poss´ıveis para o sistema ´e denominado espac¸o de fases. A evoluc¸˜ao de um tal sistema ´e descrita por um conjunto de equac¸˜oes discretas ou cont´ınuas (diferenciais) que constituem a regra que permite
prever o seu comportamento futuro, global ou parcialmente, uma vez conhecido seu estado inicial. Se as vari´aveis dependentes e o tempo forem cont´ınuos essas regras ser˜ao equac¸˜oes diferenciais ordin´arias; caso existam outras vari´aveis independentes, tamb´em cont´ınuas - como as coordenadas espaciais, no caso da f´ısica dos meios cont´ınuos ou nas teorias de campo - teremos as equac¸˜oes
diferenciais parciais. A existˆencia de alguma vari´avel discreta leva `a regra com diferenc¸as finitas, genericamente denominadas de mapeamentos.
A concepc¸˜ao determin´ıstica da mecˆanica cl´assica, exposta por Laplace, em 1814 [1], pretendia a previsibilidade quantitativa absoluta para um sistema cl´assico, se o seu estado inicial fosse conhe-cido com exatid˜ao. Maxwell, j´a em 1873 [1], com aguda sensibilidade e intuic¸˜ao f´ısica, alertava
para as limitac¸˜oes da vis˜ao determinista laplaciana e mostrava a existˆencia de sistemas que, mesmo com poucas part´ıculas, exigiam uma descric¸˜ao probabil´ıstica em func¸˜ao de apresentarem grande sensibilidade `a variac¸˜ao das condic¸˜oes iniciais. Ou seja, uma variac¸˜ao extremamente pequena nas condic¸˜oes iniciais induziria variac¸˜oes grandes no comportamento futuro desses sistemas, tornando
Mas essas id´eias n˜ao empolgaram seus contemporˆaneos e s´o com advento dos computadores e com a gerac¸˜ao recente de novos conceitos, provenientes de diversas ´areas do conhecimento, o
estudo de sistemas com comportamento ca´otico viriam se ampliar enormemente.
A classe de problemas dos bilhares constitui um dos tipos mais simples de sistemas dinˆamicos [2]. Eles consistem de uma part´ıcula confinada numa regi˜ao do espac¸o delimitada por uma fron-teira. As colis˜oes da part´ıcula com a fronteira podem ser el´asticas ou inel´asticas. A fronteira atua como uma forc¸a externa e sua posic¸˜ao no espac¸o pode ser est´atica ou dependente do tempo.
Dependendo da geometria das fronteiras, os bilhares podem apresentar dinˆamica integr´avel, n˜ao integr´avel ou ca´otica, mesmo para os casos em que a fronteira ´e est´atica. Quando a posic¸˜ao da fronteira do bilhar ´e dependente do tempo [2], a energia cin´etica da part´ıcula pode apresentar crescimento ilimitado, fenˆomeno conhecido como Acelerac¸˜ao de Fermi ou permanecer limitada.
Embora os bilhares possam ser descritos atrav´es da formulac¸˜ao Hamiltoniana, ´e mais f´acil des-crevˆe-los por meio de mapas discretos. Como o movimento da part´ıcula entre uma colis˜ao e outra ´e trivial, estes mapas descrevem a dinˆamica dos bilhares no instante de cada colis˜ao. Apesar de simples, estes sistemas apresentam dinˆamica bastante rica, o que motiva a investigac¸˜ao num´erica
e anal´ıtica de suas propriedades.
Neste trabalho, revisitamos o Modelo do Acelerador de Fermi, que ´e um tipo de bilhar
unidi-mensional, descrito por um mapeamento bidiunidi-mensional, buscando entender e descrever algumas de suas propriedades dinˆamicas. Os estudos sobre o modelo unidimensional do Acelerador de Fermi iniciaram-se em 1949 [3], quando Enrico Fermi tentou descrever um mecanismo de acelerac¸˜ao dos raios c´osmicos no meio interestelar. Este mecanismo simula as interac¸˜oes desses raios com
campos magn´eticos oscilantes. Um sistema dinˆamico que corresponde ao modelo original pro-posto por Fermi, foi depois propro-posto por Ulam [4]. Este modelo consiste de uma part´ıcula cl´assica confinada e colidindo elasticamente entre duas paredes r´ıgidas. Uma das paredes ´e assumida como sendo fixa enquanto que a outra move-se periodicamente no tempo. Tal modelo ficou conhecido
como Modelo Fermi-Ulam [5–8] e, desde ent˜ao, vem sendo estudado em muitas outras diferentes vers˜oes. Dentre algumas das modificac¸˜oes sofridas e estudadas no modelo, podemos citar a in-clus˜ao de campos externos, colis˜oes inel´asticas, coeficientes de amortecimento e tamb´em efeitos quˆanticos [9–16]. Uma vers˜ao alternativa do modelo, na presenc¸a de campo gravitacional, tamb´em
chamada de bouncer [17], consiste de uma part´ıcula colidindo em uma plataforma vertical m´ovel, sob um campo gravitacional constante. A propriedade mais importante do modelo bouncer e que se op˜oe ao modelo Fermi-Ulam ´e que ele mostra, para uma combinac¸˜ao espec´ıfica de parˆametros de controle e condic¸˜oes iniciais, o fenˆomeno da acelerac¸˜ao de Fermi. Uma vers˜ao h´ıbrida dos
resultados do modelo Fermi-Ulam no limite de campo externo zero e mostra propriedades do mo-delo bouncer para campo gravitacional intenso. Al´em disso, para um certo conjunto de parˆametros
de controle, propriedades que s˜ao caracter´ısticas individuais do modelo Fermi-Ulam e do modelo
bouncer, podem coexistir na vers˜ao h´ıbrida do modelo.
Considerando a introduc¸˜ao de dissipac¸˜ao, uma consequˆencia imediata ´e que a dinˆamica do modelo ´e drasticamente afetada. Sabemos que existem muitas diferentes maneiras de se introduzir forc¸as de amortecimento no sistema. Uma delas ´e considerar colis˜oes inel´asticas da part´ıcula com
uma das paredes ou com as duas. Assim, a part´ıcula sofre uma perda fracional de energia a cada colis˜ao. Como consequˆencia, o sistema n˜ao preserva ´area do espac¸o de fases, cuja estrutura mista ´e destru´ıda. Em especial, ´e poss´ıvel observar diferentes comportamentos assint´oticos `a medida que o coeficiente de amortecimento ´e variado. Dentre eles, efeitos de transiente [19], pontos fixos
atrativos [20] e atratores ca´oticos [21, 22]. A figura 1.1 mostra a classificac¸˜ao dos pontos fixos quanto a sua estabilidade.
Figura 1.1: Em (a) temos um ponto fixo est´avel. Em (b) temos um ponto fixo inst´avel. A figura (c)
ilustra um ponto de sela. Os pontos fixo espirais (d) e (e) correspondem, respectivamente, a um ponto est´avel e um inst´avel. A figura (f) ilustra trajet´orias em torno de um ponto fixo el´ıptico.
O atrator ´e definido como sendo um ponto ou um conjunto de pontos para o(s) qual(is) a evoluc¸˜ao temporal de uma condic¸˜ao inicial converge(m) no espac¸o de fases para tempos suficien-temente longos. Em sistemas que contraem medida no espac¸o de fases, os pontos fixos das figuras
1.1(a) e (d) correspondem a atratores. O tempo que a part´ıcula gasta vagando at´e convergir para um ou mais destes pontos ´e chamado de transiente. Em sistemas com muitos atratores, o interesse est´a centrado na determinac¸˜ao das bacias de atrac¸˜ao de cada atrator, cujas fronteiras podem ser cont´ınuas ou fractais. A bacia de atrac¸˜ao ´e uma regi˜ao no espac¸o de fases cuja evoluc¸˜ao temporal
Figura 1.2: Em (a) pontos fixos atrativos e um atrator ca´otico. Em (b) as bacias de atrac¸˜ao
correspondentes aos pontos fixos atrativos e ao atrator ca´otico.
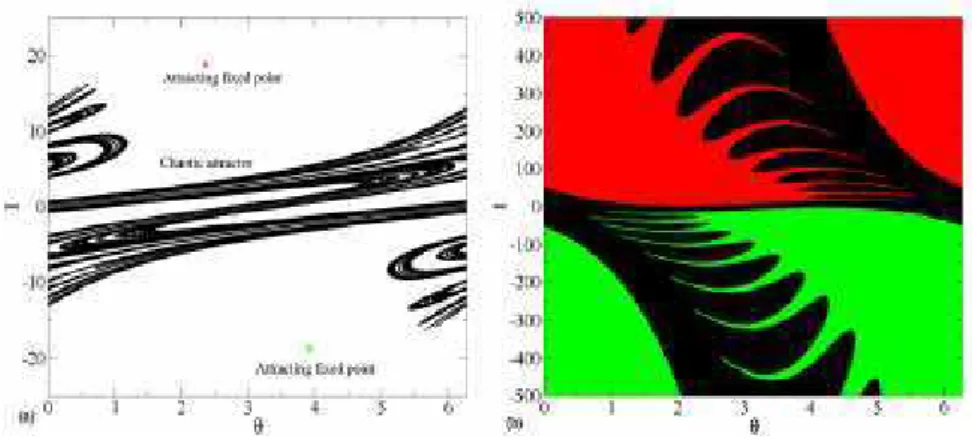
importante propriedade que pode ser extra´ıda da presenc¸a de dissipac¸˜ao na dinˆamica do modelo ´e a ocorrˆencia de crises de fronteira [22]. A figura 1.3 mostra a caracterizac¸˜ao de um evento de crise de fronteira.
Figura 1.3: Caracterizac¸˜ao de uma crise de fronteira. As variedades insta´aveis dos pontos
fi-xos de sela s˜ao mostradas nas cores vermelha e verde, ao passo que as variedades est´aveis s˜ao mostradas nas cores azul e cinza. Em (a), comportamento do sistema antes das crises e, em (b), comportamento do sistema ap´os as crises.
Um evento de crise de fronteira acontece quando dois ramos de variedades est´aveis de um ponto fixo do tipo sela, que estabelecem os limites das fronteiras das bacias de atrac¸˜ao, colidem com as bordas do seu atrator ca´otico. ´E sabido que num ponto fixo do tipo sela, que ´e um ponto de
est´aveis estabelecem as fronteiras entre o ponto fixo atrativo e o atrator ca´otico. Em outras palavras, os dois ramos das variedades inst´aveis evoluem de modo que um deles converge para o ponto
fixo atrativo enquanto que o outro converge para o atrator ca´otico. Os dois ramos da variedade est´avel geram as fronteiras da bacia de atrac¸˜ao, tanto para o atrator ca´otico quanto para o ponto fixo atrativo. Reduzindo-se a forc¸a de dissipac¸˜ao do sistema, os dois ramos da variedade est´avel colidem com as bordas do seu atrator ca´otico. Essa colis˜ao implica na s´ubita destruic¸˜ao do atrator
ca´otico e tamb´em de sua bacia de atrac¸˜ao. Ap´os a crise, o atrator ca´otico ´e substitu´ıdo por um transiente ca´otico que ´e descrito por uma lei de potˆencia [15, 23]. Outra opc¸˜ao diferente de se introduzir forc¸a de amortecimento no sistema ´e considerar que a part´ıcula move-se na presenc¸a de uma forc¸a de arrasto. Este tipo de dissipac¸˜ao age ao longo de toda a trajet´oria da part´ıcula, ao
contr´ario das colis˜oes inel´asticas, onde ela atua somente no instante de cada impacto. Este tipo de froc¸a de dissipac¸˜ao ser´a tratado nesta tese.
O principal objetivo deste trabalho ´e caracterizar os efeitos de uma forc¸a dissipativa no Modelo Fermi-Ulam. Esta forc¸a dissipativa ´e introduzida no sistema via um movimento relativo de uma part´ıcula dentro de um fluido, como um g´as. Uma consequˆencia deste tipo de forc¸a de
amorte-cimento introduzida no sistema ´e ter o determinante da matriz Jacobiana apresentando somente a propriedade de contrac¸˜ao de ´area do espac¸o de fases. Adicionalmente, para uma dada combinac¸˜ao de parˆametros de controle o sistema exibe um n´umero arbitrariamente grande de pontos fixos atra-tivos e ´orbitas peri´odicas. ´Orbita ´e a sequˆencia de posic¸˜oes de um sistema em seu espac¸o de fases,
para uma dada condic¸˜ao inicial, por onde a soluc¸˜ao passa `a medida que o tempo evolui. Este grande n´umero de ´orbitas peri´odicas produz uma complexa estrutura de bacia de atrac¸˜ao, cujos limites percorrem quase todo o espac¸o de fases. Em particular, s˜ao observados muitos atratores de baixo per´ıodo. ´E importante salientar que estudos de sistemas dinˆamicos considerando um single
rotor [24], tem mostrado que, no caso de sistemas Hamiltonianos, o sistema exibe um vasto n´umero
de ´orbitas peri´odicas est´aveis e cada uma delas converge para um ponto fixo atrativo quando uma pequena dissipac¸˜ao ´e aplicada. Al´em disso, ´e esperado que a complexidade de tal modelo possa ser extendida para sistemas de alta dimens˜ao, como por exemplo, o double rotor [25], onde para
parˆametros de controle espec´ıficos s˜ao encontrados mais de 1000 atratores peri´odicos de baixo per´ıodo. Os modelos Fermi-Ulam dissipativos estudados aqui tamb´em s˜ao modelos que exibem grande n´umero de atratores peri´odicos coexistentes. Neste trabalho, vamos estudar as principais propriedades quantitativas e qualitativas observadas nestes sistemas.
O trabalho est´a organizado da seguinte forma: no Cap´ıtulo 2 apresentamos o modelo Fermi-Ulam conservativo e discutimos as principais caracter´ısticas do sistema. No Cap´ıtulo 3,
discu-tido no Cap´ıtulo 3 ´e apresentado. No Cap´ıtulo 5, estudamos dois modelos Fermi-Ulam mistos. Os modelos s˜ao divididos em duas regi˜oes distintas separadas por um parˆametroξ. No primeiro modelo, a regi˜ao 1 ´e assumida como sendo conservativa e a regi˜ao 2 ´e dissipativa com forc¸a de arrasto do tipoF =−ηV; no segundo modelo, a regi˜ao 1 continua sendo conservativa e a regi˜ao 2 agora passa a sofrer a ac¸˜ao de uma forc¸a do tipo F =−ηV2. Finalmente, nossas conclus˜oes e
2
Modelo Fermi-Ulam Conservativo
2.1
Introduc¸˜ao
O acelerador de Fermi ´e um sistema dinˆamico proposto por Enrico Fermi [3] com o objetivo de compreender o processo pelo qual os raios c´osmicos adquirem altas energias. Este modelo consiste basicamente de uma part´ıcula carregada que interage com campos magn´eticos dependentes do
tempo. Posteriormente, v´arios autores propuseram vers˜oes do modelo original adaptadas para diferentes aplicac¸˜oes.
Quando Enrico Fermi propˆos seu estudo, ele n˜ao utilizou equac¸˜oes matem´aticas para descrever a dinˆamica do modelo. Seu estudo se concentrou na an´alise do comportamento dinˆamico do sis-tema apenas de forma qualitativa. Foi ent˜ao que Stanislaw Ulam [4], propˆos um sissis-tema dinˆamico que corresponde `a essˆencia do modelo original proposto por Fermi. Deste modo, ele pˆode
equaci-onar a dinˆamica do sistema e estudar numericamente o modelo. O modelo, ent˜ao, ficou conhecido como modelo Fermi-Ulam [5–8], tamb´em chamado de modelo bouncing ball, que consiste de uma part´ıcula cl´assica de massamconfinada entre duas paredes r´ıgidas e colidindo elasticamente com elas. Uma das paredes ´e assumida como sendo fixa ao passo que a outra move-se periodicamente
no tempo. Por ser um modelo relativamente simples, unidimensional e que produz resultados ex-tremamente interessantes, serviu de instrumento de estudo de muitos f´ısicos e matem´aticos, que acrescentaram uma variedade de modificac¸˜oes no modelo e estudaran suas propriedades. Ainda nos dias de hoje o modelo Fermi-Ulam tem despertado muito interesse uma vez que muitas de suas
propriedades dinˆamicas podem ser descritas por leis de potˆencia [3, 15].
O Modelo Fermi-Ulam ´e um modelo conservativo, pois preserva medida do espac¸o de fa-ses. Neste tipo de modelo, a estrutura caracter´ıstica de sistemas Hamiltonianos ´e observada, com espac¸o de fases misto, contendo ilhas Kolmogorov-Arnold-Moser (KAM), curvas invariantes
spanning separando diferentes porc¸˜oes do espac¸o de fases e mares de caos. As ilhas KAM s˜ao
As curvas invariantes spanning percorrem o espac¸o de fases totalmente ao longo do eixo hori-zontal, a fase, e s˜ao invariantes por iterada. Assim, uma part´ıcula na curva jamais sai dela. Como
consequˆencia de sua disposic¸˜ao no espac¸o de fases, limitam o ganho de energia da part´ıcula per-correndo o mar de caos. Tal regi˜ao do espac¸o de fases ´e muito sens´ıvel `as variac¸˜oes nas condic¸˜oes iniciais. Um bom indicador de caos ´e o conhecido expoente de Lyapunov, que mede a taxa de afastamento da evoluc¸˜ao de duas condic¸˜oes iniciais muito pr´oximas e consequentemente levando
`a perda de previsibilidade de condic¸˜oes iniciais muito pr´oximas.
Neste Cap´ıtulo, fazemos uma breve revis˜ao do modelo de Fermi Conservativo e discutimos uma simplificac¸˜ao no modelo, a qual ´e chamada de vers˜ao simplificada [8]. Na vers˜ao completa do modelo assumimos que uma das paredes est´a fixa ao passo que a outra move-se periodicamente no tempo. Na vers˜ao simplificada assumimos que as duas paredes do modelo est˜ao fixas. Constru´ımos
os espac¸os de fases para as duas vers˜oes, onde observamos a existˆencia de ilhas KAM, mares de caos e curvas invariantes spanning. Na ´ultima sec¸˜ao do cap´ıtulo, caracterizamos e avaliamos numericamente os expoentes de Lyapunov para a regi˜ao no mar de caos localizada abaixo da primeira curva invariante spanning do espac¸o de fases dos modelos completo e simplificado.
2.2
Modelo Completo
2.2.1
Mapeamento
Nesta sec¸˜ao, vamos descrever os passos necess´arios para a construc¸˜ao do mapa n˜ao-linear bidimensional que descreve o modelo Fermi-Ulam conservativo.
O modelo do acelerador de Fermi, como tamb´em ´e conhecido, consiste de uma part´ıcula
cl´assica de massa unit´aria, confinada ao interior de duas paredes r´ıgidas, sendo uma delas fixa e a outra com posic¸˜ao dependente do tempo, sofrendo colis˜oes el´asticas com as paredes. A parede fixa est´a localizada emx=le a parede m´ovel tem a equac¸˜ao da posic¸˜ao dada porxw=εcos(ωt),
onde ε ´e a amplitude de oscilac¸˜ao do movimento, ω ´e a frequˆencia angular et ´e o tempo. Neste modelo, a part´ıcula n˜ao experimenta a influˆencia de nenhum campo externo. A figura (2.1) ilustra o modelo.
A regi˜ao compreendida no intervalo dex∈[−ǫ, ǫ] ´e chamada de zona de colis˜ao. Na figura,l ´e a distˆancia entre a parede fixa e a posic¸˜ao de equil´ıbrio da parede m´ovel. A velocidade da parede m´ovelvw ´e dada pela derivada da sua posic¸˜ao em relac¸˜ao ao tempo, ou seja,vw= (dxw/dt), que
fornecevw=−εωsin(ωt). Considera-se que a velocidade da parede m´ovel n˜ao seja afetada pelas
Figura 2.1: Esquema ilustrativo do modelo Fermi-Ulam.
A dinˆamica do modelo pode ser descrita pelo uso de um mapeamento discreto, bidimensional, n˜ao-linear, escrito nas vari´aveis (v, t), ondev etcorrespondem, respectivamente, `a velocidade da part´ıcula e o tempo imediatamente ap´os a colis˜ao com a parede m´ovel. Dependendo da combinac¸˜ao de condic¸˜oes iniciais e parˆametros de controle, duas situac¸˜oes devem ser consideradas:
(1) A part´ıcula sofre mais de uma colis˜ao com a parede m´ovel antes de sair da zona de colis˜ao, emx∈[−ǫ, ǫ]. A este tipo de colis˜ao daremos o nome de Colis˜ao M´ultipla.
(2) A part´ıcula sofre uma ´unica colis˜ao com a parede m´ovel e abandona a zona de colis˜ao. A
este tipo de colis˜ao daremos o nome de Colis˜ao Simples.
Caso (1): O mapeamento para colis˜oes m´ultiplas, caso em que a part´ıcula colide sucessivas
vezes com a parede m´ovel antes de deixar a zona de colis˜ao, ´e definido como uma aplicac¸˜ao T(vn, tn) = (vn+1, tn+1), que nos permite determinar os valores dessas vari´aveis no instantetn+1
(pr´oxima colis˜ao), uma vez conhecidos os valores dessas vari´aveis no instantetn(colis˜ao anterior).
Supomos, como condic¸˜ao inicial, a situac¸˜ao em que a part´ıcula, no instantet=tn, tem posic¸˜ao
dada porxp(tn) =xw(tn) =εcos(ωtn). A part´ıcula est´a com velocidade inicialvn>0, uma vez
que est´a viajando no sentido positivo do eixox.
A velocidade da part´ıcula ´e obtida considerando a conservac¸˜ao de energia e momento no
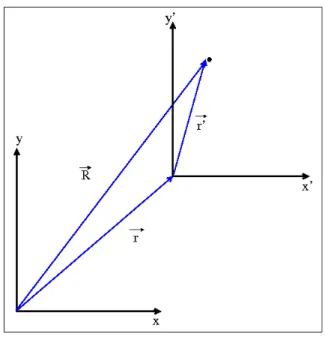
re-ferencial da parede m´ovel. A seguir, vamos descrever o processo de obtenc¸˜ao desta velocidade atrav´es deste princ´ıpio. A figura (2.2) mostra, de forma esquem´atica, como ´e feita a mudanc¸a de referenciais.
Figura 2.2: Esquema ilustrativo da mudanc¸a de referenciais. O planoxyrepresenta o referencial inercial, ou seja, a parede fixa. O plano x′y′ representa o referencial n˜ao inercial, ou seja, a parede m´ovel.
dinˆamica ´e unidimensional, a partir daqui n˜ao consideraremos mais a notac¸˜ao vetorial) medida no
referencial inercial, dada por
vp=vp′+vw, (2.1)
onde v′p ´e a velocidade da part´ıcula vista do referencial n˜ao inercial e vw ´e a velocidade da
pa-rede medida no referencial inercial. Identificando o instante imediatamente anterior ao choque pelo ´ındicej e o instante imediatamente posterior ao choque pelo ´ındicek, podemos reescrever a equac¸˜ao (2.1) nestes dois instantes,
vp,j′ =vp,j−vw,j, (2.2)
v′p,k=vp,k−vw,k. (2.3)
No sistema n˜ao inercial, a velocidade da part´ıcula depois da colis˜ao ´e a mesma de antes da colis˜ao (condic¸˜ao de colis˜oes el´asticas), por´em com o sentido contr´ario, ou seja
vp,k′ =−v′p,j. (2.4)
Substituindo a equac¸˜ao (2.2) na equac¸˜ao (2.4), encontramos que,vp,k′ =−(vp,j−vw,j), ou ainda
Tendo encontrado no sistema n˜ao inercial a velocidade da part´ıcula depois da colis˜ao, voltamos novamente ao referencial inercial da parede fixa, combinando a equac¸˜ao (2.3) com a equac¸˜ao (2.5)
e obtemos
vp,k=−vp,j+vw,j+vw,k. (2.6)
Podemos reescrever esta equac¸˜ao com novos ´ındices, substituindo, do lado esquerdo, o ´ındice (k)que caracteriza o instante posterior ao impacto pelo ´ındice(n+1), que caracteriza o pr´oximo impacto (n+1), uma vez que o mapeamento sempre considera as velocidades ap´os os impactos com a parede m´ovel. O lado direito da express˜ao ser´a modificado levando-se em conta que a velocidade com que a part´ıcula alcanc¸a a parede m´ovel no momento anterior ao impacto (´ındice j), ´e igual `a velocidade da part´ıcula logo ap´os o impacto anterior (´ındicen) e que a velocidade da parede imediatamente anterior ao impacto ´e igual `a sua velocidade imediatamente ap´os ao impacto, calculada no instante(n+1). Assim,
vp,(n+1)=−vp,(n)+2vw,(n+1). (2.7)
Uma vez que a velocidade da parede m´ovel ´e vw = −εωsin(ωt), temos que a velocidade da
part´ıcula para o caso das colis˜oes m´ultiplas ´e dada por:
vn+1=−vn−2εωsin(ωtn+1). (2.8)
O pr´oximo passo ´e obter o instante da colis˜ao da part´ıcula com a parede m´ovel (tc). Este
instante ´e obtido da condic¸˜ao de que xw(t) =xp(t), ou seja, no instante do choque, a posic¸˜ao
da parede m´ovel ´e igual `a posic¸˜ao da part´ıcula. Sabemos que a velocidade da part´ıcula do nosso
modelo ´e sempre constante, consequentemente sua acelerac¸˜ao ´e nula. Assim podemos, de forma mais gen´erica, utilizar a equac¸˜ao da posic¸˜ao da cinem´atica,x−x0=v0(t−t0) + (1/2)a(t−t0)2,
para encontrarmos a posic¸˜ao da part´ıcula no instante de colis˜ao com a parede m´ovel. Considerando a acelerac¸˜ao nula, o segundo termo depois da igualdade da equac¸˜ao acima se torna zero, reduzindo
nossa equac¸˜ao a x−x0=v0(t−t0). Isolandox, encontramosx=x0+v0(t−to). Combinando
esta equac¸˜ao com os dados do nosso problema, obtemos que
xw(tn+1) =xp(tn+1) =xp(tn) +vntc, (2.9)
ondexw(tn+1) ´e a posic¸˜ao da parede m´ovel no instante da colis˜ao(n+1)com a part´ıcula,xp(tn)
´e a posic¸˜ao da part´ıcula no instante da colis˜ao n evn ´e a velocidade da part´ıcula no intervalo tc
entre as colis˜oes. Combinando as equac¸˜oes anteriores, encontramos
que fornece,
g(tc) =εcos(ω[tn+tc])−εcos(ωtn)−vntc. (2.10)
O instante de tempo tc ´e obtido numericamente resolvendo-se g(tc) =0. Se a func¸˜ao g(tc) n˜ao
admitir soluc¸˜ao no intervalo tc ∈ (0,2π/ω], podemos concluir que a part´ıcula deixa a zona de
colis˜ao sem experimentar colis˜oes m´ultiplas com a parede m´ovel. Entretanto, considerando que a part´ıcula est´a na zona de colis˜ao, o tempo na pr´oxima colis˜ao(tn+1) ´e, ent˜ao, dado por
tn+1=tn+tc, (2.11)
ondetnrepresenta o tempo inicial da evoluc¸˜ao etco instante da colis˜ao da part´ıcula com a parede
m´ovel.
Assim, podemos escrever o mapeamento que descreve a dinˆamica do modelo para colis˜oes m´ultiplas da part´ıcula com a parede m´ovel, dado pelas Eqs.(2.8) e (2.11), na forma
TM : (
vn+1=−vn−2εωsin(ωtn+1)
tn+1=tn+tc
. (2.12)
onde o ´ındice “M” denota colis˜oes m´ultiplas.
Considerando, agora, o caso (2), em que a part´ıcula sofre uma ´unica colis˜ao com a parede m´ovel antes de abandonar a zona de colis˜ao, vamos contruir o seu mapeamento.
Num instante inicialtn, supomos novamente que a posic¸˜ao da part´ıcula seja a mesma que a
posic¸˜ao da parede m´ovel,xp(tn) =xw(tn), e que sua velocidade inicial seja positiva,vn>0, uma
vez que a part´ıcula est´a se deslocando no sentido positivo ao longo do eixo x. A part´ıcula viaja em direc¸˜ao `a parede fixa, colide elasticamente e ´e refletida em direc¸˜ao `a parede m´ovel. Para obter a fase da parede m´ovel na pr´oxima colis˜ao, precisamos determinar o tempo que a part´ıcula gasta para percorrer este caminho, saindo de xp(tn) =xw(tn) e viajar at´ex=l, ser refletida e viajar
novamente at´e a pr´oxima colis˜ao. A figura (2.3) mostra o trajeto percorrido pela part´ıcula.
Considerando a velocidade constante vn com que a part´ıcula viaja para a direita, temos que
vn = (l−εcos(ωtn))/td, onde td ´e o intervalo de tempo que a part´ıcula gasta viajando para a
direita. Isolandotd, encontramos
td=
l−εcos(ωtn)
vn
.
Considerando, agora, a velocidade constante ve com que a part´ıcula viaja para a esquerda, com
Figura 2.3: Trajeto percorrido pela part´ıcula saindo da zona de colis˜ao, colidindo elasticamente
com a parede fixa, sendo refletida e entrando novamente na zona de colis˜ao.
gasta viajando para a esquerda, at´e alcanc¸ar a zona de colis˜ao. Isolandote, encontramos
te=
l−ǫ vn
.
De volta `a zona de colis˜ao, a part´ıcula colide com a parede m´ovel no instante em quexw(t) =xp(t)
e, para que esta condic¸˜ao seja satisfeita, vamos utilizar a equac¸˜ao da posic¸˜ao dada pela equac¸˜ao (2.9). Considerando (i) o tempo de viagem da part´ıcula para a direita (td), do instante do choque
com a parede m´ovel at´e o choque com a parede fixa, incluindo o tempo para abandonar a zona de colis˜ao; (ii) o tempo de viagem da part´ıcula para a esquerda(te), da parede fixa at´e a entrada na
zona de colis˜ao; (iii) e o intervalo de tempo (tc) entre a entrada na zona de colis˜ao e a pr´oxima
colis˜ao, podemos substituir estes valores na equac¸˜ao (2.9) e obtermos,
εcos[ω(tn+td+te+tc)] =ε−vntc,
que ´e a equac¸˜ao que fornece o tempo de colis˜ao da part´ıcula com a parede m´ovel tc. O sinal da
velocidade ´e negativo devido a part´ıcula estar viajando para a esquerda, no sentido negativo do eixoxantes de colidir com a parede m´ovel. Chamando esta equac¸˜ao def(tc)e fazendof(tc) =0,
obtemos
f(tc) =εcos[ω(tn+td+te+tc)]−ε+vntc. (2.13)
O tempotn+1no instante do choque(n+1), ser´a dado pela somas dos tempos do argumento
da func¸˜ao cosseno da equac¸˜ao (2.13), ou seja
tn+1=tn+td+te+tc. (2.14)
anteriormente. Assim, da equac¸˜ao (2.7), temos quevn+1=−ve+2vw. Considerando como
ante-riormente queve =−vndevido ao choque el´astico, obtemos a equac¸˜ao,
vn+1=vn+2vw. (2.15)
Sabemos que vw(tn) =−εωsin(ωtn)no instantetn. Analogamente, no instantetn+1, a equac¸˜ao
da velocidade da parede fica vw =−εωsin(tn+td+te+tc). Note que a soma dos tempos no
argumento da func¸˜ao seno desta equac¸˜ao ´e o pr´oprio tn+1. Considerando que a velocidade da
part´ıcula para a esquerda ´e negativa e substituindo na equac¸˜ao (2.15) estas express˜oes encontradas, a velocidade da part´ıcula na pr´oxima colis˜ao ´e ent˜ao dada por
vn+1=vn−2εωsin(ωtn+1), (2.16)
ou seja, a velocidade da part´ıcula ap´os o choque com a parede m´ovel.
Assim, as Eqs.(2.14) e (2.16) formam o mapeamento geral para o caso das colis˜oes simples, dado por
TS : (
vn+1=vn−2εωsin(ωtn+1)
tn+1=tn+td+te+tc
, (2.17)
onde o ´ındice “S” denota colis˜oes simples.
Para obtermos tc, precisamos encontrar uma raiz para a equac¸˜ao (2.13), que ´e uma equac¸˜ao
transcendental. Desse modo,tcn˜ao pode ser obtido analiticamente de forma expl´ıcita, mas apenas
numericamente.
A func¸˜aof(tc)pode admitir mais de uma raiz no intervalotc∈[0,2π/ω], mas a colis˜ao entre
a parede m´ovel e a part´ıcula ´e representada pela raiz de menor valor dentro deste intervalo.
Como podemos ver, existe um n´umero excessivo de parˆametros de controle nos mapas(2.12) e (2.17), como ω, ε e l e nem todos s˜ao relevantes para a descrever a dinˆamica, portanto, para descrever a dinˆamica do sistema n˜ao precisamos de todas elas. Ent˜ao, torna-se conveniente definir vari´aveis adimensionais mais apropriadas. Assim, definimos ǫ =ε/l, Vn =vn/(ωl) e o tempo
´e medido em termos do n´umero de oscilac¸˜oes da parede m´ovel, consequentemente, φn =ωtn.
Incorporando estas novas vari´aveis no modelo, o mapaT, tal queT(Vn, φn) = (Vn+1, φn+1), pode
ser escrito como
T :
(
Vn+1=Vn∗−2ǫsin(φn+1)
φn+1=φn+∆Tn mod(2π)
, (2.18)
onde o termoVn∗=−Vne o termo∆Tn=φc, comφc obtido da equac¸˜ao
comφc∈(0,2π], para o caso das Colis˜oes M´ultiplas.
No caso das Colis˜oes Simples, o termo Vn∗ =Vn e o termo ∆Tn = ([(1−ǫcos(φn))/Vn] +
[(1−ǫ)/Vn] +φc), comφcobtido da equac¸˜ao
F(φc) =ǫcos(φn+φd+φe+φc)−ǫ+Vnφc, (2.20)
comφc∈[0,2π].
A func¸˜aomod(2π)foi introduzida para manter a fase dentro do intervalo[0,2π].
2.2.2
Matriz Jacobiana
O c´alculo da matriz Jacobiana ser´a usado para a obtenc¸˜ao dos expoentes de Lyapunov nas
sec¸˜oes seguintes.
A matriz Jacobiana J do mapa T ´e a matriz cujos coeficientes s˜ao dados pelas derivadas parciais em relac¸˜ao `as equac¸˜oes do mapa dado por(2.18), definido em termos da velocidadeVn+1
e da faseφn+1. Esta matriz ´e escrita como
J=
∂Vn+1
∂Vn
∂Vn+1
∂φn
∂φn+1
∂Vn
∂φn+1
∂φn .
Considerando o caso (1), para as colis˜oes m´ultiplas, os elementos da matriz Jacobiana s˜ao
dados por
∂Vn+1
∂Vn = −
1−2ǫcos(φn+1)
∂φn+1
∂Vn ,
∂Vn+1
∂φn
= −2ǫcos(φn+1)
∂φn+1
∂φn
,
∂φn+1
∂Vn =
∂φc
∂Vn,
∂φn+1
∂φn
= 1+∂φc ∂φn
,
onde os termos ∂φc
∂Vn e
∂φc
∂φn s˜ao obtidos derivando-se implicitamente G(φc) =0 em relac¸˜ao `aVn e
φn, respectivamente. Assim,
−ǫsin(φn+1)
∂φc
∂Vn
φc−Vn
∂φc
∂Vn
∂φc
∂Vn =
φc
−Vn−ǫsin(φn+1)
, (2.21)
−ǫsin(φn+1)
1+∂φc ∂φn
+ǫsin(φn)−Vn
∂φc
∂φn
=0,
∂φc
∂φn
= ǫsin(φn+1)−ǫsin(φn)
−Vn−ǫsin(φn+1)
. (2.22)
O determinante da matriz Jacobiana ´e dado pela seguinte multiplicac¸˜ao
det(J) =
∂Vn+1
∂Vn
·
∂φn+1
∂φn
−
∂Vn+1
∂φn
·
∂φn+1
∂Vn
.
Assim, depois de alguma ´algebra, encontramos que o determinante da matriz Jacobiana para o
caso das colis˜oes m´ultiplasdet(JM) ´e dado por,
det(JM) =
Vn+ǫsin(φn)
Vn+1+ǫsin(φn+1)
. (2.23)
O ´ındice “M” denota colis˜oes M´ultiplas.
De posse do determinante da matriz Jacobianadet(JM), podemos verificar por que o modelo
Fermi-Ulam ´e chamado de conservativo. Para isso, vamos analisar a evoluc¸˜ao de uma medida
infinitesimal do espac¸o de fases bidimensional deste modelo, como mostra a figura (2.4).
Figura 2.4: Exemplo de evoluc¸˜ao de uma medida infinitesimal do espac¸o de fases do modelo
Fermi-Ulam. Na figura,dA=dV dφ.
a seguir,
d(An+1) =det(J) d(An).
A equac¸˜ao acima nos diz que a medida no instante(n+1)´e igual ao determinante da matriz Jacobi-ana multiplicado pela medida num dado instante inicial(n). Substituindo o valor do determinante det(JM)para colis˜oes m´ultiplas na equac¸˜ao acima, obtemos
d(An+1) =
Vn+ǫsin(φn)
Vn+1+ǫsin(φn+1)
d(An).
A evoluc¸˜ao das medidas, por definic¸˜ao, ´e dada pela evoluc¸˜ao da velocidade da part´ıcula e da fase da parede m´ovel no instante da colis˜ao. Reorganizando os termos, ficamos com
d(Vn+1) d(φn+1) (Vn+1+ǫsin(φn+1)) = (Vn+ǫsin(φn)) d(Vn) d(φn).
Chamando o termo do lado esquerdo do sinal da igualdade de (dµn+1)e o termo do lado direito
do sinal de igualdade de(dµn), obtemos,
dµn+1=dµn.
Podemos observar que todos os termos com ´ındice (n+1)ficaram do lado esquerdo da equac¸˜ao enquanto que os termos com ´ındice(n)ficaram do lado direito. Este resultado nos mostra que a evoluc¸˜ao das medidas no instante(n+1)´e igual `a evoluc¸˜ao das medidas no instante(n). ´E impor-tante enfatizar que o formato da medida no insimpor-tante inicial da evoluc¸˜ao n˜ao tem necessariamente o mesmo formato geom´etrico da medida no instante final da evoluc¸˜ao.
Considerando o caso (2), colis˜oes simples, os elementos da matriz Jacobiana s˜ao dados por
∂Vn+1
∂Vn
= 1−2ǫcos(φn+1)
∂φn+1
∂Vn
, ∂Vn+1
∂φn
= −2ǫcos(φn+1)
∂φn+1
∂φn
,
∂φn+1
∂Vn
= ǫcos(φn)−l Vn2
+ǫ−l Vn2
+∂φc ∂Vn
,
∂φn+1
∂φn
= 1+ǫsin(φn) Vn
+∂φc ∂φn
.
Os termos ∂φc
∂Vn e
∂φc
∂φn s˜ao obtidos derivando-se implicitamenteF(φc) =0 em relac¸˜ao `a Vn e φn,
respectivamente. Assim,
−ǫsin(φn+1)
−1−ǫVcos2(φn)
n −
1−ǫ V2
n
+∂φc ∂Vn
+φc+Vn
∂φc
∂φc
∂Vn
= ǫ
sin(φn+1)
h
ǫcos(φn)−l
Vn2 +
ǫ−l Vn2
i
−φc
Vn−ǫsin(φn+1)
. (2.24)
−ǫsin(φn+1)
1+ǫsinφn Vn
+∂φc ∂φn
+Vn
∂φc
∂φn
=0,
∂φc
∂φn
=
ǫsin(φn+1)
h
1+ǫsin(φn)
Vn
i
Vn−ǫsin(φn+1)
. (2.25)
Encontrados os elementos, agora podemos obter o determinante da matriz Jacobiana (JS) que,
depois de algum algebrismo, nos d´a que
det(JS) =
Vn+ǫsin(φn)
Vn+1+ǫsin(φn+1)
, (2.26)
onde o ´ındice “S” denota colis˜oes Simples.
Pela mesma an´alise da evoluc¸˜ao de uma medida infinitesimal do espac¸o de fases discutida anteriormente, podemos concluir que o determinante da matriz Jacobiana para o caso das colis˜oes simples tamb´em conserva medida do espac¸o de fases do modelo completo de Fermi-Ulam. Por
esta raz˜ao, este modelo ´e chamado de Modelo Conservativo. O fato dedet(J)n˜ao ser igual a 1 se deve ao fato das vari´aveis usadas na descric¸˜ao do mapeamento n˜ao serem pares canˆonicos.
A matriz Jacobiana tamb´em constitui um dos requisitos para se obter os expoentes de Lyapu-nov de um determinado sistema, como veremos na sec¸˜ao 2.4.2.
2.3
Modelo Simplificado
2.3.1
Mapeamento
No modelo Fermi-Ulam completo, o tempo entre colis˜oes da part´ıcula com a parede m´ovel ´e obtido resolvendo numericamente uma equac¸˜ao transcendental. Entretanto, existe uma simplificac¸˜ao do modelo em que o deslocamento da parede m´ovel ´e desprezado, considerando o tempo entre dois choques com a parede m´ovel dado por∆t=2/V, em queV ´e a velocidade da part´ıcula [11]. A transferˆencia de momento entre a parede m´ovel e a part´ıcula, no entanto, continua a ocorrer como descrito na vers˜ao completa. Esta aproximac¸˜ao permite que as simulac¸˜oes sejam realizadas mais rapidamente, uma vez que o tempo entre colis˜oes,∆t, n˜ao ´e obtido de uma equac¸˜ao transcenden-tal. Nesta simplificac¸˜ao, as colis˜oes sucessivas n˜ao existem e, em decorrˆencia disto, a dinˆamica da
vers˜ao simplificada do modelo Fermi-Ulam, al´em de acelerar as simulac¸˜oes num´ericas, mant´em a n˜ao-linearidade do problema e muitas de suas propriedades dinˆamicas.
No modelo simplificado do acelerador de Fermi considera-se que as duas paredes est˜ao fixas,
uma emx=0 e a outra emx=1, j´a considerando vari´aveis adimensionais. Ao colidir com uma das paredes (com a parede emx=0, por exemplo), a part´ıcula sofre uma troca de energia e momentum como se a parede estivesse se movendo. As equac¸˜oes transcendentais no modelo completo s˜ao obtidas no momento em que a part´ıcula colide com a parede m´ovel. Uma vez que a parede emx=0 no modelo simplificado ´e assumida como sendo fixa, as equac¸˜oes produzidas no ato da colis˜ao n˜ao s˜ao mais transcendentais, reduzindo-se significantemente o tempo das simulac¸˜oes num´ericas.
Para a construc¸˜ao do mapeamento, supomos que a part´ıcula parte da posic¸˜aox=0 e viaja em direc¸˜ao `a parede emx=1. A velocidade inicial da part´ıcula ´eV0>0, pois est´a se deslocando na
direc¸˜ao positiva do eixox. O tempo gasto pela part´ıcula neste trajeto ´e, ent˜ao,(1/V0). A part´ıcula
colide elasticamente com a parede em x= 1 e tem sua velocidade invertida. Para percorrer o trajeto de volta, a part´ıcula gasta um tempo correspondente a (1/V0). Portanto, para completar
uma viagem partindo dex=0, colidir emx=1 e retornar emx=0, a part´ıcula gasta um tempo total de (2/V0). Logo, a fase na pr´oxima colis˜ao ser´a dada pela soma da fase inicial φ0 com o
tempo total gasto para completar o trajeto, ou seja,φ1= [φ0+ (2/V0)]mod(2π).
A velocidade inicial da parede emx=0, dada a transferˆencia de energia e momento no instante da colis˜ao com a part´ıcula, ´e dada porV =−ǫsin(φ), em analogia ao modelo completo. Portanto, da equac¸˜ao (2.7), encontramos a express˜ao da velocidade da part´ıcula na pr´oxima colis˜ao, que ´e dada porV1=V0−2ǫsin(φ1). Para evitar queV1assuma valores negativos, o que corresponderia
`a part´ıcula viajar em uma regi˜ao externa `as paredes, impomos que a velocidade da part´ıcula seja
sempre positiva, introduzindo arbitrariamente na express˜ao da velocidadeV1uma func¸˜ao m´odulo.
Eliminadas as divergˆencias e definindo vari´aveis adimensionais tais comoǫ=ε/l,Vn=vn/(ωl)e
φn=ωtn, o mapeamento para o modelo Fermi-Ulam simplificado pode ser escrito como
T :
Vn+1=|Vn−2ǫsin(φn+1)|
φn+1=
h
φn+V2n i
2.3.2
Matriz Jacobiana
A matriz Jacobiana(J)para este modelo simplificado tem elementos dados por
∂Vn+1
∂Vn
= sign[Vn−2ǫsin(φn+1)][1−2ǫcos(φn+1)]
∂φn+1
∂Vn
,
∂Vn+1
∂φn =
sign[Vn−2ǫsin(φn+1)][−2ǫcos(φn+1)]
∂φn+1
∂φn ,
∂φn+1
∂Vn
= 2
Vn2
,
∂φn+1
∂φn
= 1.
e o determinante desta matriz ´e
det(J) = sign[Vn−2ǫsin(φn+1)].
Este determinante nos d´a exatamente a id´eia do conceito de m´odulo. Se a express˜ao deVn+1 for
maior que zero, ent˜ao o sinal da express˜ao dentro do m´odulo ´e(+1), ao passo que, se for negativa, a express˜ao dentro do m´odulo ´e(−1). Assim, fica assegurado que a part´ıcula ficar´a confinada na regi˜ao entre as paredes e o determinante(J)pode ser escrito como,
det(Jn) =±1. (2.28)
Pelo teorema de Liouville [27], que diz que se o determinante da matriz Jacobiana de um sistema ´e igual a±1, ent˜ao o sistema ´e conservativo. Logo, o modelo Fermi-Ulam simplificado conserva medida do espac¸o de fases.
2.4
Resultados Num´ericos
2.4.1
Espac¸os de Fases
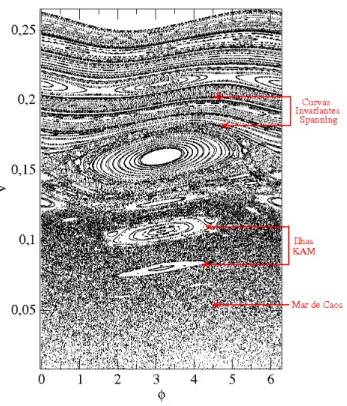
A Fig.(2.5) mostra o espac¸o de fases para o modelo Fermi-Ulam completo.
Na construc¸˜ao da figura (2.5) foram usadas 400 condic¸˜oes iniciais iteradas a partir das equac¸˜oes do mapa (2.18), de modo que a fase e a velocidade iniciais foram divididas em 20 incrementos
igualmente espac¸ados nos intervalos deφ0∈[0,2π]eV0∈[0.01,0.25]. O procedimento para
sa-ber se houve ou n˜ao colis˜ao sucessiva da part´ıcula com a parede m´ovel consiste em encontrar, numericamente, ra´ızes (ou zeros) para as func¸˜oesG(φc)eF(φc), dadas pelas Eqs.(2.19) e (2.20),
respectivamente. Se a func¸˜aoG(φc)admitir soluc¸˜ao no intervalo deφc∈(0,2π], ent˜ao houve
Figura 2.5: Espac¸o de fases para o modelo Fermi-Ulam. O parˆametro de controle usado na
construc¸˜ao da figura foiǫ=5×10−3.
contr´ario, uma raiz para a func¸˜ao F(φc) ´e encontrada e as equac¸˜oes do mapa (2.18) s˜ao iteradas
para o caso (2). Em seguida, uma nova raiz paraG(φc)´e procurada e todo o processo se repete at´e
que o n´umero de iterac¸˜oes (colis˜oes) estabelecido no in´ıcio da simulac¸˜ao seja atingido.
No espac¸o de fases mostrado na figura (2.5) podemos observar que a regi˜ao de mais baixa energia ´e limitada por uma curva invariante do tipo spanning. Nesta regi˜ao existem ilhas KAM que por sua vez est˜ao envoltas por um mar de caos. As ilhas KAM tˆem a caracter´ıstica de n˜ao permitirem o trˆansito livre de uma ´orbita entre seu interior e o mar de caos. Assim, a evoluc¸˜ao de
uma condic¸˜ao inicial que esteja em seu interior jamais sai de l´a, da mesma forma que uma ´orbita pertencente ao mar de caos jamais penetra na ilha KAM. A regi˜ao que est´a acima da primeira curva invariante spanning ´e a regi˜ao convencionada como de alta energia e apresenta basicamente pequenas ilhas KAM separadas por outras curvas invariantes spanning e podem, eventualmente,
possibilitar o surgimento de pequenos mares de caos entre as curvas, mas este fato n˜ao ´e sempre observado.
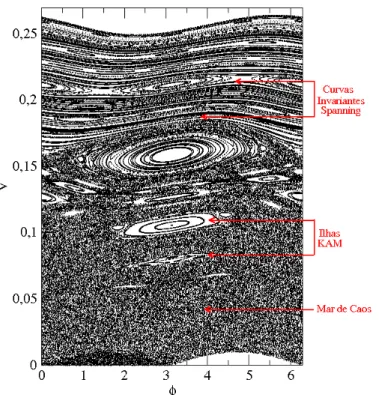
O espac¸o de fases para o modelo Fermi-Ulam simplificado ´e bastante similar ao do modelo completo, apresentando a mesma hierarquia de comportamentos com ilhas KAM, mar de caos e curvas invariantes spanning. Existe apenas uma pequena diferenc¸a na regi˜ao perto das velocidades
Na construc¸˜ao do espac¸o de fases do modelo simplificado, iteramos as equac¸˜oes do mapa (2.27) utilizando 400 condic¸˜oes iniciais divididas em 20 incrementos igualmente espac¸ados nos
intervalos deφ0= [0,2π]eV0= [0.01,0.25](os mesmos utilizados no modelo completo). Cada
condic¸˜ao inicial foi iterada 500 vezes. A figura (2.6) mostra o espac¸o de fases para o modelo Fermi-Ulam simplicado.
Figura 2.6: Espac¸o de fases para o modelo Fermi-Ulam simplificado. O parˆametro de controle
usado na construc¸˜ao da figura foiǫ=5×10−3.
Podemos observar que o espac¸o de fase para o modelo simplificado ´e muito semelhante ao do
modelo completo, apresentando ilhas KAM circundadas por um mar de caos na regi˜ao de mais baixa energia, limitada pela primeira curva invariante spanning e ilhas KAM separadas por outras curvas invariantes spanning na regi˜ao de alta energia (acima da primeira curva). A diferenc¸a notada se limita `a regi˜ao com velocidades pr´oximas de zero que se deve `a introduc¸˜ao do m´odulo
na equac¸˜ao da velocidade do mapeamento.
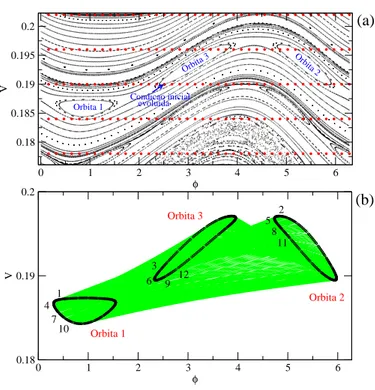
Uma curiosidade que surgiu em relac¸˜ao ao espac¸o de fases do modelo Fermi-Ulam conser-vativo, foi sobre a convergˆencia das trajet´oria para cada arranjo de comportamentos mostrado no espac¸o de fases do tipo misto, especialmente naquelas regi˜oes onde nenhuma condic¸˜ao inicial era evolu´ıda. As regi˜oes “em branco” observadas neste espac¸o de fases s˜ao visitadas em algum
converge, n˜ao para uma ´unica ilha KAM, mas para um conjunto delas ao mesmo tempo. Veja a figura.
0 1 2 3 4 5 6
φ
0.18 0.185 0.19 0.195 0.2
V
0 1 2 3 4 5 6
φ
0.18 0.19 0.2
V
1
2
3
4
5
6
7
8
9
10
11
12
Orbita 1
Orbita 3
Orbita 2
(a)
(b)
Orbita 1
Orbita 3
Orbita 2
Condicao inicial evoluida
Figura 2.7: Convergˆencia de uma condic¸˜ao inicial para trˆes ilhas KAM dos espac¸o de fases do
modelo Fermi-Ulam conservativo simplificado. Em (a) vemos o detalhe da regi˜ao estudada e, em (b), ´e mostrada em que ´orbita a trajet´oria se inicia e a sequˆencia em que ela evolui.
Na figura (2.7)(a) ´e mostrado o espac¸o de fases simplificado do Modelo Fermi-Ulam Conser-vativo, na cor preta, em escala ampliada, de modo a destacar a regi˜ao onde fizemos a an´alise da evoluc¸˜ao de uma condic¸˜ao inicial. Os pontos, na cor vermelha, mostram as coordenadas de todas
as condic¸˜oes iniciais evolu´ıdas. Podemos observar que, a condic¸˜ao inicial escolhida est´a contida na ´orbita 3. A figura (2.7)(b), mostra, em detalhes, que a condic¸˜ao inicial evolu´ıda converge para trˆes ´orbitas. Neste modelo, a trajet´oria percorrida por esta condic¸˜ao inicial soma um total de 500 pontos, mostrados na cor preta. ´E mostrada tamb´em, a sequˆencia em que a part´ıcula transita pelo
espac¸o dando origem `as ´orbitas (trac¸os na cor verde). Podemos ver que a trajet´oria se inicia na ´orbita 1, passa pela ´orbita 2, segue para a ´orbita 3 e retorna para a ´orbita 1. Esta sequˆencia ´e matida at´e o final da convergˆencia e um detalhe importante a se observar ´e que ela cresce sempre no sentido anti-hor´ario das ´orbitas. Enfatizamos, ainda, que o grupo das trˆes ilhas, escolhidas para
Observe que, tanto a ´orbita 2 quanto a ´orbita 3 possuem condic¸˜oes iniciais em suas ´orbitas. Assim, ´e razo´avel de esperar que a evoluc¸˜ao dessas condic¸˜oes iniciais percorram todos os pontos da
´orbita em que est´a inserida. J´a com a ´orbita 1, o mesmo n˜ao acontece. Veja que nenhuma condic¸˜ao inicial est´a em sua ´orbita mas, mesmo assim, ela ´e visitada. Da´ı nossa curiosidade em descobrir, qual condic¸˜ao inicial percorre a ´orbita 1. A figura (2.7)(a) mostra que a coordenada [0.19,2.51], para a velocidade da part´ıcula e a fase, respectivamente, ´e a condic¸˜ao inicial que converge para a
´orbita 1, al´em das ´orbitas 2 e 3 e que a ´orbita 1 ´e a primeira delas a ser visitada.
Este comportamento ocorre, tamb´em, em outras regi˜oes do espac¸o de fases, formando, assim, a rica e complexa hierarquia de estruturas que comp˜oem o espac¸o de fases do Modelo Fermi-Ulam conservativo, tanto completo quanto simplificado.
2.4.2
Precis˜ao Num´erica
O estudo das propriedades de sistemas ca´oticos ´e frequentemente realizado de forma num´erica. Portanto, ´e importante conhecer as vantagens e limitac¸˜oes dos m´etodos num´ericos dispon´ıveis. Normalmente, ao estudar sistemas n˜ao-lineares devemos escolher qual a melhor maneira de
resol-ver o problema. Contudo, mesmo utilizando a t´ecnica mais apropriada, a soluc¸˜ao num´erica obtida n˜ao ´e um resultado exato. Os computadores trabalham com um n´umero finito de algarismos sig-nificativos. Devido a esta limitac¸˜ao, o procedimento num´erico gera erros de tal forma que, ap´os um determinado tempo, a soluc¸˜ao n˜ao corresponde ao estado inicial do sistema, mas corresponde,
por exemplo, ao estado de uma configurac¸˜ao inicial vizinha `a que foi utilizada. Assim, devemos interpretar os resultados e julgar at´e que ponto o resultado ´e confi´avel.
Nesta sec¸˜ao vamos descrever o m´etodo num´erico utilizado na soluc¸˜ao das equac¸˜oes transcen-dentais G(φc) e F(φc) respons´aveis pelo tempo da colis˜ao da part´ıcula com a parede m´ovel do
nosso problema.
O m´etodo que adotamos para resolver estas equac¸˜oes foi o m´etodo da bissec¸˜ao [28], que ´e um m´etodo num´erico de refinamento de ra´ızes, feito via processo iterativo. Um m´etodo iterativo
consiste em uma sequˆencia de instruc¸˜oes que s˜ao executadas passo a passo, algumas delas s˜ao repetidas em ciclos. A execuc¸˜ao de um ciclo recebe o nome de iterac¸˜ao. A principal caracter´ıstica do m´etodo da bissec¸˜ao ´e reduzir a amplitude do intervalo [a, b], onde cont´em a soluc¸˜ao, sempre pela metade, at´e atingir uma precis˜ao tal que b−a < tol, onde tol ´e a tolerˆancia previamente estabelecida. A seguir, vamos descrever os c´alculos para obtenc¸˜ao de zeros de func¸˜oes utilizando o m´etodo da bissec¸˜ao.
Seja uma func¸˜aof(x). O m´etodo da bissec¸˜ao exige quef(x)seja cont´ınua emx∈[a, b] =I0
sinal diferente def(b). Se isto ocorrer, esta condic¸˜ao garante que a func¸˜aof(x)intercepta o eixo xemx∈[a, b]pelo menos uma vez. Se a derivada def(x)n˜ao muda de sinal emx∈(a, b), ent˜ao esta intersec¸˜ao ´e ´unica. O segundo passo ´e encontrar umx0=a+2b e avaliarf(x0). Sef(x0)tem o
mesmo sinal def(a), ent˜ao o novo intervalo parax´ex∈a+b
2 , b
=I1, mas sef(x0)tem o mesmo
sinal def(b), ent˜aox∈
a,a+2b
=I1. No pr´oximo passo,x1 assume o valor m´edio do intervalo
I1 e o mesmo procedimento ´e repetido v´arias vezes at´e se encontrar umx∗ tal que|f(x∗)|< tol,
ondetol ´e uma tolerˆancia pr´e estabelecida.
Incorporando este m´etodo ao nosso modelo, temos que o intervalo onde as equac¸˜oes g(t) e f(t). O procedimento para obter as soluc¸˜oes de t s˜ao: ap´os a colis˜ao com a parede m´ovel, procuramos uma soluc¸˜ao para g(t). Seg(t) n˜ao admitir soluc¸˜ao emt∈(0,2π], ent˜ao n˜ao houve colis˜ao m´ultipla, de modo que a part´ıcula colide com a parede fixa emx=0 e retorna. Neste caso, a func¸˜ao f(t) ´e resolvida e g(t) ´e testada novamente. Se g(t) admitir uma soluc¸˜ao no intervalo (0,2π], ent˜ao ocorreu uma colis˜ao m´ultipla eg(t) ´e resolvida. Esse processo ´e realizado todas as vezes que a part´ıcula colide com a parede m´ovel. Salientamos que tanto a func¸˜aog(t)quanto af(t) podem ter mais de uma soluc¸˜ao no intervalo t∈[0,2π]. Neste caso, a soluc¸˜ao que tem interesse f´ısico ´e somente a primeira delas, que representa o instante da primeira colis˜ao. As outras soluc¸˜oes devem ser desconsideradas.
Para garantir que encontramos a soluc¸˜ao desejada, que retrata o instante em que ocorreu a colis˜ao, dividimos o intervalo original em n intervalos menores, dados por I0 =
0,2nπ
, I1 =
2π n,
4π n
, I2=
4π n ,
6π n
; ..., In =
h(n−1)2π
n ,2π
i
. Para cada sub-intervalo, na ordem crescente, as condic¸˜oes de sinais distintos nos extremos s˜ao verificadas parag(t)ef(t). Se a primeira condic¸˜ao ´e satisfeita emI0, ent˜ao a segunda condic¸˜ao do sinal da derivada ´e verificado. Se existir mudanc¸a
no sinal da derivada, ent˜ao o intervalo ´e refinado novamente e assim por diante at´e que o m´etodo da bissec¸˜ao possa ser usado. Se a soluc¸˜ao n˜ao estiver contida em I0, o intervalo I1 ´e verificado
e isto acontece at´e o ´ultimo intervalo In. A soluc¸˜ao ´e admitida se existir umt∗ tal que |g(t∗)|<
tol ou |f(t∗)|< tol. Aqui, tol ´e a tolerˆancia e, quando utilizamos precis˜ao dupla na simulac¸˜ao computacional, como geralmente acontece,tol=1×10−16.
O m´etodo da bissec¸˜ao tem convergˆencia lenta quando comparado com outros m´etodos, como o m´etodo de Raphson, por exemplo, mas a soluc¸˜ao obtida ´e confi´avel. O m´etodo de Newton-Raphson pode fornecer uma soluc¸˜ao da equac¸˜ao que n˜ao tem interesse f´ısico, ou seja, uma soluc¸˜ao
fora do intervalot∈[0,2π]no nosso caso, o que n˜ao representa um resultado de interesse.
2.4.3
Expoentes de Lyapunov
Vimos, na sec¸˜ao anterior, que os espac¸os de fases do modelo Fermi-Ulam, tanto completo
na regi˜ao de mais baixa energia. Sabemos que o que determina um comportamento ca´otico ´e a perda de previsibilidade de condic¸˜oes iniciais muito pr´oximas e que uma ´unica condic¸˜ao inicial
iterada naquela regi˜ao ca´otica do espac¸o de fases do modelo Fermi-Ulam ´e suficiente para pre-encher toda a regi˜ao acess´ıvel. Os expoentes de Lyapunov s˜ao bons indicadores de caos e muito utilizados na caracterizac¸˜ao de tais sistemas. Eles indicam se uma ´orbita ´e sens´ıvel ou n˜ao `as condic¸˜oes iniciais, ou seja, se elas se separam uma da outra com o passar do tempo. Nosso
obje-tivo, nesta sec¸˜ao, ´e utilizar o c´alculo do expoente de Lyapunov para caracterizar o comportamento ca´otico encontrado no espac¸o de fases do modelo Fermi-Ulam conservativo.
Para obter os expoentes de Lyapunov, precisamos verificar se duas ´orbitas, partindo de condic¸˜oes iniciais vizinhas, divergem exponencialmente uma da outra com o passar do tempo. Se tal di-vergˆencia ocorre, ent˜ao as ´orbitas s˜ao classificadas como ca´oticas. Se duas ´orbitas permanecerem
pr´oximas ou divergem apenas linearmente, ent˜ao n˜ao s˜ao sens´ıveis `as condic¸˜oes iniciais e, conse-quentemente, n˜ao s˜ao ca´oticas.
Vamos agora efetuar os c´alculos para obtenc¸˜ao dos expoentes de Lyapunov. Iniciaremos com um mapeamento unidimensional e generalizaremos para mapas bidimensionais.
Seja o mapa unidimensional,
Xn+1=F(Xn). (2.29)
Considerando o mapeamento discreto unidimensional representado porF(X)eX0uma condic¸˜ao
inicial, podemos definir a distˆancia relativa entre duas trajet´orias, na n-´esima iterac¸˜ao, pela raz˜ao,
d ǫ0 ≡
|F(n)(X0+ǫ0)−F(n)(X0)|
ǫ0
, (2.30)
ondeǫ0 ´e arbitrariamente pequeno. Considerando o limite em queǫ0→0, podemos definir,
lim
ǫ0→0
F(n)(X0+ǫ0)−F(n)(X0)
ǫ0
=|F′(n)(X0)| ≡e(λn). (2.31)
Tomando logar´ıtmo de ambos os lados da equac¸˜ao (2.31) e reorganizando os termos, obtemos que o expoente de Lyapunov, para mapeamentos unidimensionais, ´e dado por,
λ= 1 n ln|F
′(n)
(X0)|. (2.32)
Considerando o caso em que n→∞, a express˜ao para o c´alculo do expoente de Lyapunov ´e dada por,
λ= lim
n→∞
1 n
n
∑
i=1
ln|F′(Xi)|. (2.33)
s˜ao dados por
λj= lim n→∞
n
∑
i=1
1 nln|Λ
i
j|, com j=1,2. (2.34)
O termoΛij representa os autovalores da matrizM =∏ni=1Ji(Vi, φi)eJi ´e a matriz Jacobiana do
mapeamento avaliada na ´orbita(Vi, φi). ´E importante salientar que a implementac¸˜ao direta de um
algoritmo computacional para avaliar a equac¸˜ao (2.34), implica em profundas limitac¸˜oes para se obter a matrizM. Mesmo no limite de pequenos(n), as componentes deM podem assumir muitas ordens de grandeza diferentes para ´orbitas ca´oticas e atratores peri´odicos, tornando impratic´avel
a implementac¸˜ao do algoritmo. Em outras palavras, o c´alculo da matrizM pode gerar problemas num´ericos. Para evitar tais problemas, vamos utilizar um algoritmo chamado de Algoritmo de
Triangularizac¸˜ao, proposto por Eckman em 1985 [29].
O algoritmo consiste em escrever a matrizJa partir do produto de uma matriz Triangular(T) por uma matriz Ortogonal(Θ), tal como,
J =ΘT,
onde(J)´e a matriz Jacobiana.
Uma matriz ´e dita ser ortogonal quando sua transposta ´e igual `a sua inversa, ou seja,
Θ−1=ΘT.
Usando estas definic¸˜oes, podemos reescrever a matrizM como
M=Jn Jn−1Jn−2, ..., J2J1=JnJn−1, ..., J2Θ1Θ1−1J1,
ondeT1=Θ1−1J1. Um produto deJ2Θ1define uma novaJ2′. Em um pr´oximo passo, ´e poss´ıvel
mostrar que
M =JnJn−1, ..., J3Θ2Θ2−1J2′T1.
O mesmo procedimento pode ser usado para obterT2=Θ2−1J2′e assim por diante. Usando este
procedimento, o problema se resume a avaliar os elementos da diagonal principal da matriz(T): T11eT22. Para tanto, devemos encontrar as express˜oes deΘ1−1J1=T1, dadas por
cos(θ) sin(θ)
−sin(θ) cos(θ)
!
. j11 j12 j21 j22
!
= T11 T12 0 T22
!
.
j11cos(θ) +j21sin(θ) j12cos(θ) +j22sin(θ)
−j11sin(θ) +j21cos(θ) −j12sin(θ) +j22cos(θ)
!
= T11 T12 0 T22
!
.
Como ´e uma igualdade de matrizes, podemos escrever
−j11sin(θ) +j21cos(θ) =0,
−j11sin(θ) =−j21cos(θ),
sin(θ) cos(θ) =
j21
j11
.
Para melhor visualizar quem s˜ao o cateto oposto e o cateto adjacente das raz˜oes trigonom´etricas acima, vamos utilizar a ilustrac¸˜ao contida na figura (2.8).
Figura 2.8: No triˆangulo retˆangulo da figura, encontramos quem s˜ao o cateto oposto (CO) e
o cateto adjacente (CA) usados na obtenc¸˜ao do sin(θ) e do cos(θ) e aplicamos o Teorema de Pit´agoras para encontrarmos a hipotenusa (HI).
Da figura (2.8), podemos concluir que
sin(θ) = q j21
j2 11+j212
,
cos(θ) = q j11
j2 11+j212
.
Dessas express˜oes, podemos agora reescrever os autovalores da matriz(T), ou seja
T11=j11cos(θ) +j21sin(θ) =
j2 11+j212
q
(j2
11+j212 )
T22=j22cos(θ) +j12sin(θ) =
j11j22−j12j21
q
(j2
11+j212 )
. (2.36)
Encontrados os autovaloresT11eT22da matriz Triangular, podemos encontrar numericamente
os expoentes de Lyapunov para uma ´orbita ca´otica do espac¸o de fases do modelo Fermi-Ulam.
Em sistemas Hamiltonianos, os expoentes de Lyapunov aparecem aos pares, com sinais contr´arios (Robert C. Hilborn) [26]. O expoente que determina se uma ´orbita ´e ca´otica ´e o expoente de Lya-punov positivo, pois, pela equac¸˜ao (2.31), vemos que com λ positivo, o valor da distˆancia dvai aumentando exponencialmente, caracterizando uma separac¸˜ao entre as ´orbitas vizinhas cada vez
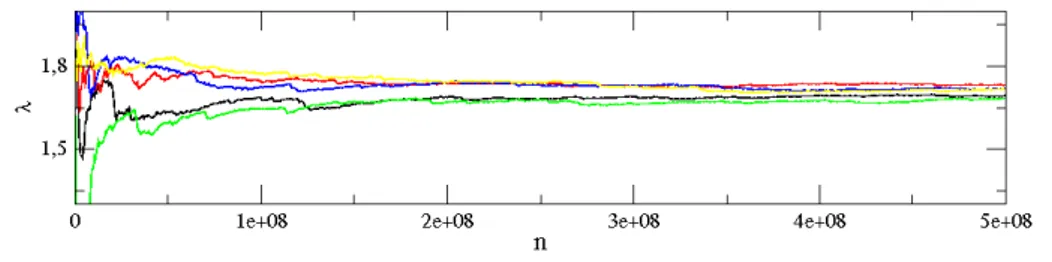
mais r´apida. Esta perda de previsibilidade das condic¸˜oes iniciais ´e o que define uma ´orbita ca´otica. A figura (2.9) mostra a convergˆencia dos expoentes de Lyapunov, para o modelo Fermi-Ulam completo, em func¸˜ao do n´umero de iterac¸˜oes.
Figura 2.9: Convergˆencia dos expoentes de Lyapunov para o modelo Fermi-Ulam completo.
Foram usadas cinco condic¸˜oes iniciais diferentes, iteradas 5×107 vezes na regi˜ao de mais baixa energia do espac¸o de fases, correspondente `a regi˜ao do mar de caos. Este valor do n´umero de iterac¸˜oes foi escolhido por possibilitar a visualizac¸˜ao de uma boa convergˆencia das curvas. As condic¸˜oes iniciais utilizadas na construc¸˜ao da figura foramV0=1×10−4, ǫ=1×10−4 e cinco
valores deφ, no intervaloφ∈[0,2π). Para estes parˆametros de controle, o expoente de Lyapunov positivo encontrado foiλ=0.78±0.02. O erro±0.02 representa o desvio padr˜ao das cinco s´eries temporais.
Tamb´em calculamos os expoentes de Lyapunov para o modelo Fermi-Ulam simplificado. Como mostra a figura (2.10), uma boa convergˆencia dos resultados foi obtida, como func¸˜ao do
n´umero de colis˜oes.
Os parˆametros de controle usados foramǫ=1×10−4,V0=1×10−4e cinco valores deφ, no
Figura 2.10: Convergˆencia dos expoentes de Lyapunov para o modelo Fermi-Ulam simplificado.
Nossos resultados mostram que os pares de expoentes de Lyapunov encontrados possuem mesmo m´odulo e sinais contr´ario, cuja soma ´e nula. Este fato era esperado uma vez que o mo-delo Fermi-Ulam, tanto completo quanto simplificado, ´e descrito por um sistema Hamiltoniano e tem medida do espac¸o de fases preservada. Em sistemas conservativos, a soma dos expoentes de
3
Modelos Fermi-Ulam Dissipativos
3.1
Introduc¸˜ao
Neste cap´ıtulo revisitamos o Modelo Fermi-Ulam dissipativo. Nosso objetivo ´e entender e
descrever algumas de suas propriedades dinˆamicas, quando uma forc¸a dissipativa do tipo arrasto gasoso ´e introduzida no sistema.
Uma consequˆencia da introduc¸˜ao de dissipac¸˜ao no sistema ´e que sua dinˆamica ´e drasticamente afetada. Sabemos que existem muitas diferentes maneiras de se introduzir forc¸as de amortecimento em um sistema. Uma delas ´e considerar colis˜oes inel´asticas da part´ıcula com uma das paredes ou
com as duas. Assim, a part´ıcula sofre uma perda fracional de energia a cada colis˜ao. Como consequˆencia, o sistema n˜ao preserva medida do espac¸o de fases. Com isso, a estrutura mista ´e destru´ıda. Em especial, ´e poss´ıvel observar diferentes comportamentos assint´oticos `a medida que o coeficiente de amortecimento ´e variado. Dentre eles, efeitos de transiente [19], pontos fixos
atrativos [20] e atratores ca´oticos [21].
Nosso objetivo neste Cap´ıtulo ´e, ent˜ao, estudar as principais propriedades quantitativas e
qua-litativas observadas no modelo Fermi-Ulam, sob a influˆencia de uma forc¸a dissipativa introduzida via um arrasto viscoso, como um g´as. Vamos estudar o modelo considerando, primeiramente, a forc¸a de arrasto viscoso diretamente proporcional `a velocidade da part´ıcula,F =−V, onde o ex-poente da velocidade ´e (γ=1). Leonel and McClintock [30] mostraram que, para uma forc¸a de amortecimento proporcional `a velocidade da part´ıcula, o sistema produz determinantes das matri-zes Jacobianas que ora contraem a medida do espac¸o de fases e ora preservam medida do espac¸o de fases. Em seguida, vamos considerar a forc¸a de arrasto diretamente proporcional ao quadrado da
velocidade da part´ıcula,F =−V2, onde o expoente da velocidade ´e(γ=2). Uma consequˆencia