UNIVERSIDADE NOVA DE LISBOA
FACULDADE DE CIÊNCIAS E TECNOLOGIA
Departamento de Engenharia Electrotécnica
Desenvolvimento de Ambiente para
Caracterização Automática de PLLs
Por
Pedro Miguel Ribeiro Pereira
Orientadora:
Prof.ª Doutora Maria Helena Fino
Lisboa
2005
Dissertação apresentada na Faculdade de Ciências e
Tecnologia da Universidade Nova de Lisboa para
obtenção do grau de Mestre em Engenharia
Agrade cim e n to s
Os meus sinceros agradecimentos à minha orientadora, Prof. Doutora Maria Helena Fino, que, pela sua singular personalidade e elevada capacidade de trabalho, colaborou através de sugestões e críticas, deveras úteis para a realização deste trabalho, assim como, pelas revisões feitas à redacção do documento.
Ao Prof. Doutor Amadeu Leão Rodrigues, pela oportunidade de participar no projecto CLIMBER, tornando possível uma maior disponibilidade para a realização do presente trabalho, desejo manifestar o meu agradecimento.
Su m ário
Os PLLs constituem uma classe de sistemas largamente utilizados numa vasta gama de aplicações incluindo não só sistemas de comunicação como aplicações de reconstituição de relógio em sistemas digitais. A necessidade de projectar os circuitos em tempos competitivos e com elevada fiabilidade torna imperiosa a utilização de programas de apoio ao projecto automático dos circuitos.
A existência de programas que permitam o desenvolvimento automático de modelos dos componentes de PLLs é fundamental por forma a tornar possível a simulação a nível comportamental dos referidos circuitos.
No presente trabalho é desenvolvido um ambiente para geração automática de modelos dos diversos elementos constituintes dos PLLs. Para tal, é apresentado um estudo dos conceitos associados ao funcionamento de PLLs bem como do funcionamento de blocos integrantes. São também alvo de estudo, diversas topologias para os diferentes blocos dos PLLs.
Abs tract
The PLLs belong to a class of systems which are widely used in a large range of applications including not only communication systems, but also applications of clock reconstitution in digital systems. The need to produce highly reliable circuits in competitive time makes the use of support software associated to the automatic design of the circuits absolutely necessary.
The existence of software which allows the automatic development of models of the PLLs elements is essential to make the simulation of the behaviour of the mentioned circuits possible.
In this work, an application for the automatic generation of models of the PLLs elements is developed. So, a study is undertaken in order to broaden concepts associated with the operation of PLLs and to present the functioning of the integrant blocks. Several topologies concerning different blocks of the PLLs are also a matter of study.
Ín dice
Introdução... 17
Capítulo 1 Introdução aos PLLs... 19
1.1 Introdução ... 19
1.2 Detector de Fase - PD... 21
1.3 Oscilador Controlado por Tensão - VCO... 22
1.4 Modelo do PLL ... 24
1.5 Largura de Banda ... 28
1.6 Filtro ... 30
1.7 Condições para manter a Captura... 32
1.8 Condições de Aquisição ... 35
1.9 Conclusões ... 39
Capítulo 2 Filtros ... 41
2.1 Introdução ... 41
2.2 Filtro passivo passa-baixo ... 42
2.3 Conclusões ... 45
Capítulo 3 Oscilador Controlado por Tensão - VCO ... 47
3.1 Introdução ... 47
3.2 Características das células de atraso... 48
3.2.1 Ganho ... 48
3.2.2 Células de atraso... 50
3.4 2ª Arquitectura (J. Maneatis - 1994)... 57
3.4.1 Cargas Simétricas ... 58
3.4.2 Frequência de oscilação... 59
3.4.3 Circuito de polarização ... 60
3.5 3ª Arquitectura (Park, Kim - 1999) ... 61
3.6 4ª Arquitectura (Yan, Luong - 2001)... 62
3.7 Conclusões... 64
Capítulo 4 Aplicação Desenvolvida... 65
4.1 Introdução... 65
4.1.1 Funcionamento da aplicação ... 66
4.2 Filtro ... 69
4.2.1 Integração no modelo do PLL ... 70
4.2.2 Filtro – Aplicação desenvolvida ... 70
4.2.3 Exemplo – Filtro 1ª ordem... 73
4.2.4 Exemplo – Filtro 2ª ordem... 75
4.3 VCO... 77
4.3.1 Integração no modelo do PLL ... 78
4.3.2 VCO – Aplicação desenvolvida ... 78
4.3.3 1º Exemplo – 100 MHz ... 81
4.3.4 2º Exemplo – 150 MHz ... 84
4.3.5 3º Exemplo – 200 MHz ... 87
4.4 Conclusões... 90
Capítulo 5 Conclusões ... 91
Referências ... 93
Anexos………... 95
Anexo A – Ficheiro de simulação do filtro (Hsipce) ... 97
Ín dice de Figu ras
Figura 1.1 - Diagrama de blocos de um PLL ... 20
Figura 1.2 – Característica do PD ... 21
Figura 1.3 – Característica do PD (θd0 = 0) ... 21
Figura 1.4 – Modelo do PD... 22
Figura 1.5 – Característica do VCO ... 23
Figura 1.6 – Característica do VCO ... 23
Figura 1.7 – Modelo do VCO... 24
Figura 1.8 – Detector de Fase (multiplicador) ... 24
Figura 1.9 – Representação dos sinais vi(t), θe(t) e vo(t)... 25
Figura 1.10 – Sinal de saída do PD ... 25
Figura 1.11 – Característica do detector de fase ... 26
Figura 1.12 – Modelo do PLL... 27
Figura 1.13 – Modelo ac do PLL ... 28
Figura 1.14 – PLL com atenuador resistivo ... 29
Figura 1.15 – PLL com Filtro passivo... 30
Figura 1.16 – Diagrama de blocos do PLL no domínio s... 31
Figura 1.17 - PLL com Filtro activo ... 31
Figura 1.18 – Característica do PD e do VCO ... 32
Figura 1.19 – PLL de 2ª ordem ... 33
Figura 1.20 – PLL de 2ª ordem ... 35
Figura 2.1 – Filtro genérico... 42
Figura 2.2 – Filtros passivos passa-baixo de 1ª ordem... 43
Figura 2.3 – Filtro passivo de 3ª ordem ... 43
Figura 3.2 – Arquitectura genérica de um VCO... 49
Figura 3.3 – Célula de atraso com arquitectura diferencial ... 51
Figura 3.4 – Célula de atraso com arquitectura diferencial ... 54
Figura 3.5 – Característica ID (VDS) do transístor PMOS ... 55
Figura 3.6 – Controlo do VCO por tensão... 57
Figura 3.7 – Célula de atraso com cargas simétricas... 57
Figura 3.8 – Carga simétrica ... 58
Figura 3.9 – Característica IL(VL)... 59
Figura 3.10 – Célula de atraso diferencial ... 61
Figura 3.11 – Estrutura do VCO com entrada dual ... 62
Figura 3.12 – Célula de atraso ... 63
Figura 4.1 – Interface de alto nível da aplicação ... 66
Figura 4.2 – Característica de blocos constituintes de PLL... 67
Figura 4.3 – Modelo do PLL ... 68
Figura 4.4 – Fluxograma do dimensionamento do filtro ... 71
Figura 4.5 – Filtro passivo passa-baixo ... 72
Figura 4.6 – Output da aplicação (filtro de 1ª ordem) ... 74
Figura 4.7 Output do simulador Hspice, filtro de 1ª ordem... 75
Figura 4.8 – Output da aplicação (filtro de 2ª ordem) ... 76
Figura 4.9 – Output do simulador Hspice, filtro de 2ª ordem... 77
Figura 4.10 – Fluxograma da aplicação... 80
Figura 4.11 – Output da aplicação (100 MHz) ... 82
Figura 4.12 – Output do simulador Hspice (100MHz)... 83
Figura 4.13 – Característica do VCO (100MHz) ... 84
Figura 4.14 – Output da aplicação (150 MHz) ... 85
Figura 4.15 - Output do simulador Hspice (150MHz) ... 85
Figura 4.16 – Característica do VCO (150MHz) ... 86
Figura 4.17 – Output da aplicação (200 MHz) ... 88
Ín dice de Tabe las
Tabela 2.1 – Parâmetros da função de transferência ... 44
Tabela 4.1 – Parâmetros da função de transferência Z(s) ... 72
Tabela 4.2 – Valor dos componentes dos filtros ... 73
Tabela 4.3 – Resultados para um filtro de 1ª ordem (200 Mrad/s)... 73
Tabela 4.4 – Resultados para um filtro de 2ª ordem (200 Mrad/s)... 75
Tabela 4.5– Dimensões dos transístores pelo Matlab, para 100MHz ... 82
Tabela 4.6 – Dimensões dos transístores pelo Hspice, para 100MHz... 82
Tabela 4.7 – Tabela comparativa de resultados do Hspice com a equação linear determinada ... 83
Tabela 4.8 – Dimensões dos transístores pelo Matlab, para 150MHz ... 84
Tabela 4.9 – Dimensões dos transístores pelo Hspice, para 150MHz... 84
Tabela 4.10 – Tabela comparativa de resultados do Hspice com a equação linear determinada ... 86
Tabela 4.11 – Dimensões dos transístores pelo Matlab, para 200MHz ... 87
Tabela 4.12 – Dimensões dos transístores pelo Hspice, para 200MHz... 87
Tabela 4.13 – Tabela comparativa de resultados do Hspice com a equação linear determinada ... 88
In tro du ção
As malhas de captura de fase (em inglês Phase Locked Loop - PLL) constituem um sistema electrónico de grande utilidade para aplicações em sintetizadores de frequência em sistemas de comunicação, desmodulação de sinal em FM e AM, sincronização de relógio e regeneração de sinal, entre outras.
De entre os elementos que constituem o PLL, o oscilador controlado por tensão (em inglês Voltage Controlled Oscillator - VCO) é aquele cuja implementação é mais crítica, pois o VCO é o responsável pela geração do sinal de saída.
Neste trabalho pretende-se desenvolver uma aplicação para caracterização automática dos elementos que constituem os PLLs. A necessidade desta aplicação deve-se ao facto de o projecto de PLLs ser complexo, sobretudo devido aos VCOs actualmente realizados em tecnologia CMOS. Os osciladores como bloco principal dos PLLs estão em destaque neste trabalho. O projecto de VCOs recorrendo a repetidas simulações torna-se demasiado moroso pelo que se torna necessário o desenvolvimento de modelos simples e precisos para caracterizar estes elementos. A necessidade de modelos de elevada precisão torna imperioso o desenvolvimento de modelos baseados em parâmetros tecnológicos.
referidas.
O segundo capítulo é dedicado ao filtro. O bloco de filtragem é um elemento fundamental em um PLL, pois permite rejeitar o ruído do sinal que deve chegar ao VCO no caso dos circuitos de transmissão, ou na implementação de moduladores. É apresentada uma topologia para a implementação de filtros. São apresentados os fundamentos teóricos para a caracterização do filtro na aplicação desenvolvida.
O VCO é descrito no terceiro capítulo. Como principal bloco de PLLs, são apresentadas quatro arquitecturas de VCOs. É realizada uma descrição do funcionamento da célula de atraso de cada arquitectura. É adoptada uma das arquitecturas descritas para ser usada na aplicação desenvolvida.
O capítulo quatro é destinado à aplicação desenvolvida. São apresentadas as interfaces da aplicação desenvolvidas em Matlab. O processo de dimensionamento do filtro e do VCO é aqui explicado. São apresentados os resultados teóricos e os obtidos recorrendo ao simulador de circuitos
Hspice, sendo feita uma análise da concordância entre os resultados obtidos.
Capítu lo 1
In tro du ção ao s PLLs
1.1
In tro du ção
Neste capítulo é apresentado o PLL. Inicialmente considera-se o PLL de 1ª ordem e são apresentados os respectivos blocos constituintes. É ainda feita uma breve enumeração das características dos PLLs como sejam: a largura de banda, erro de fase, tempo de aquisição, margem de captura e ruído. Seguidamente introduz-se o PLL de 2ª ordem descrevendo diversos tipos de filtro. Uma vez apresentados os PLLs são abordadas as principais características destes elementos, nomeadamente a Largura de Banda, as condições necessárias para que o PLL possa realizar a aquisição de sinal assim como manter a sua captura.
O PLL no seu modelo mais simples é constituído por um Detector de Fase (PD) e um Oscilador Controlado por Tensão (VCO) como se ilustra na figura 1.1 [1]. A sua função é sincronizar a fase do sinal produzido pelo VCO com a fase do sinal aplicado.
Figura 1.1 - Diagrama de blocos de um PLL
O detector de fase é o responsável por determinar a diferença de fase (θi) do sinal de entrada com a fase (θo) do sinal de saída do oscilador e produzir uma tensão de saída proporcional a essa diferença, Vd. Essa tensão é aplicada ao VCO, designada por tensão de controlo Vc, de forma a produzir um sinal vo, cuja frequência é proporcional à sua tensão de entrada. Através da realimentação negativa o PLL tenta sincronizar a fase dos dois sinais. Quando tal acontece diz-se que existe captura do sinal [2].
A informação dos sinais do PLL é caracterizada, não pela característica tensão vs tempo, mas pela frequência/fase desses mesmos sinais. O erro de fase é assim uma das características a ter em conta nos PLLs. A largura de banda, o tempo de captura, condições de manter a captura assim como o ruído são também características de um PLL a ter em consideração no respectivo projecto.
O PLL é um sistema que apresenta um comportamento altamente não linear, especialmente quando a diferença de fase dos dois sinais é elevada e o sistema tenta anulá-la. A análise ao comportamento não linear do PLL é deveras complexa, no entanto, mesmo um modelo linear do seu comportamento, para pequenas diferenças de fases, pode fornecer muita informação acerca do seu comportamento [3].
Será então apresentado um modelo linear de cada bloco constituinte de um PLL, de forma a fornecer os fundamentos teóricos para uma abordagem mais complexa.
Detector de Fase (PD)
vi(ωi, θi) vo(ωo, θo)
Oscilador (VCO)
1.2
De te cto r de Fas e - PD
O detector de fase, como referido, tem por objectivo determinar a diferença de fase (θd) entre os dois sinais. O PD produz uma tensão Vd em resposta a essa diferença. A característica do PD na sua forma mais simples, ou seja, considerando o PD com característica linear, está representada na figura 1.2.
Quando o sinal externo vi é nulo, o PD produz uma tensão Vdo à qual corresponde uma fase
θdo, como mostra a figura 1.2. É usual fazer a deslocação da característica de forma a que θdo seja zero, isto é Vd = Vdo, esta característica esta representada na figura 1.3.
Figura 1.2 – Característica do PD
Figura 1.3 – Característica do PD (θd0 = 0) π
θ π ≤ ≤
− d
(
volts)
d V
do V
do
θ
2 π −
(
volts)
d V
do V
π θ π ≤ ≤
Considere-se agora o erro de fase como a diferença entre θd e θdo.
do d
e θ θ
θ = − (1.1)
É de salientar que nestas condições, quando θe = 0, não implica que os dois sinais estejam em fase. O declive da característica do PD é designado por ganho do PD, Kd. Este pode ser determinado pela relação
e d d
d dv K
θ
= (1.2)
Para simplificação de análise, considere-se a característica do PD como sendo linear. Assim pode-se modelar matematicamente a sua característica pela equação
do e d
d K V
V = θ + (1.3)
a que corresponde o modelo do PD representado na figura 1.4.
Figura 1.4 – Modelo do PD
1.3
Os cilado r Co n tro lado po r Te n s ão - VCO
Numa primeira aproximação considera-se o VCO com a característica representada na figura 1.5, onde a frequência do sinal de saída é função da tensão de controlo Vc.
Quando o sinal de controlo é nulo, o VCO gera um sinal com uma frequência vulgarmente denominada por ωfree . Associado a está característica esta o ganho do VCO, Ko. Este ganho é função do declive da característica, assim
c o o
dV d
K = ω (1.4)
Kd
Vdo
θi
-θo
Figura 1.5 – Característica do VCO
Quando é aplicado um sinal de controlo Vc, o VCO produz uma tensão de amplitude fixa com uma frequência
c o free
o =ω +K V
ω (1.5)
Designa-se por desvio da frequência de saída, ∆ωo, à diferença de frequência entre os dois sinais.
i o
o ω ω
ω = −
∆ (1.6)
Figura 1.6 – Característica do VCO
Quando existe captura, ωo =ωi e ao valor de Vc da característica chama-se tensão de controlo “estática” Vco. Esta tensão depende do valor da frequência do sinal de entrada. A representação ∆ωo
ωo
(Mrad/s)
Vc (volts)
ωfree
ωo = ωi
Vco
Vc (volts)
∆ω
o
vs Vc também é a característica do VCO para uma frequência de sinal a ser gerado, e encontra-se representada na figura 1.6.
Da característica anterior, também se pode definir o ganho Ko como
c o o
dv d
K = ∆ω (1.7)
logo
(
c co)
o o=K v −V
∆ω (1.8)
Um modelo gráfico para o VCO esta representado na figura 1.7. De salientar que o modelo do VCO depende da frequência do sinal a ser gerado.
Figura 1.7 – Modelo do VCO
1.4
Mo de lo do PLL
Como referido, um PLL de 1ª ordem é composto pelo detector de fase e pelo oscilador controlado por tensão. Existe uma diversidade enorme de modelos de PD, no entanto de grosso modo todos (os analógicos) se podem resumir ao funcionamento de um multiplicador, como mostra a figura 1.8.
Figura 1.8 – Detector de Fase (multiplicador)
Considere-se dois sinais com a mesma frequência, mas com fases diferentes tal que
[
]
[
(
)
]
cos
)
(
)
(
sin
)
(
0 00
t
V
t
t
v
t
t
V
t
v
i i iθ
ω
θ
ω
+
=
+
=
vd(t)
vi(t)
vo(t)
Vc
-Vco
Ko
na saída do multiplicador, obtém-se
[
(t) (t)]
. VV sin[
t (t) (t)]
sin V V . ) t (
vd =05 i o θi −θo +05 i o 2ω +θi +θo (1.9) Considere-se que o erro de fase entre os dois sinais θe varia linearmente e que o sinal de entrada possui fase inicial nula. Pode-se reescrever a equação da saída do PLL em função do erro de fase θe
[
()]
cos )
( 0
0 t V t t
v = ω −θe
Na figura 1.9 encontram-se representados o andamento de vi
( )
t , θe( )
t e vo( )
t .Figura 1.9 – Representação dos sinais vi(t), θe(t) e vo(t)
O sinal de saída do PD, obedece à equação 1.9 e está representado na figura 1.10.
Figura 1.10 – Sinal de saída do PD
Analisando a equação (1.9), verifica-se que a tensão à saída do multiplicador tem dois termos. O primeiro termo é apenas função da diferença de fase dos dois sinais, representado a vermelho na figura 1.10, e o segundo termo tem frequência dupla e é função da soma das fases dos sinais.
vi(t)
θe(t)
vo(t)
t t
π/2
π
3π/2
t
t vd
Pode-se utilizar o sinal de saída do multiplicador para sincronizar os dois sinais, pois este é função da diferença de fase dos sinais. O termo de frequência dupla pode ser filtrado, pois não fornece qualquer informação útil, para tal torna-se necessário introduzir um filtro passa-baixo no PLL. A sua largura de banda não deve ser muito elevado para evitar ruído, deve sobretudo eliminar o termo de frequência dupla.
Considerando que se elimina totalmente o termo de frequência dupla, o sinal à saída do filtro será
[
(
t
)
(
t
)
]
sin
V
V
.
)
t
(
v
d=
0
5
i oθ
i−
θ
o[
()]
sin 5. 0 )
(t VV t
vd = i o θe (1.10)
onde
o i
d . VV
K =05
Após a filtragem o sinal vd(t) fornece a indicação do erro existente entre a fase dos dois sinais. A relação entre estes dois sinais é a característica do PD, representada na figura 1.11. Para valores de erro de fase pequenos, têm-se sin
( )
θe ≈θe, a equação (1.10) reduz-se à equação (1.11). Se se aproximar a característica do PD a uma onda triangular, obtêm-se a característica apresentada na figura 1.3.e d d K
v ≈ ⋅θ (1.11)
Figura 1.11 – Característica do detector de fase
Pretende-se que o erro de fase seja nulo de modo a atingir a captura. Esse objectivo só é conseguido se existir uma variação de fase do sinal proveniente do VCO. O VCO permite variar a frequência do seu sinal por meio da aplicação do sinal de controlo externo, Vc.
vd
θe
Como se mostrou, o ganho do VCO, Ko, representa a variação instantânea da frequência do VCO em função do erro de sinal, tal que
c o
dv
d
K
=
ω
(1.12)Recordando, se o sinal de saída do VCO for
[
t
(
t
)
]
cos
V
)
t
(
v
o=
oω
+
θ
o (1.13)aplicando uma tensão na sua entrada, ele deverá variar a sua frequência de trabalho segundo a relação
) t ( v Ko out =ω +
ω (1.14)
É sabido que para qualquer sinal periódico existe uma relação entre a frequência e a fase do sinal segundo a expressão
∫
= t f t dt t 0 ) ( 2 ) (
π
θ
(1.15)Desde o início que se refere que o PLL compara a fase de dois sinais, logo interessa exprimir a fase em função da diferença de frequência
∆
ω
o, vem∫
∆
=
t(
t
)
dt
)
t
(
0 0ω
θ
(1.16)esta relação indica que uma variação da frequência origina uma variação da fase do sinal.
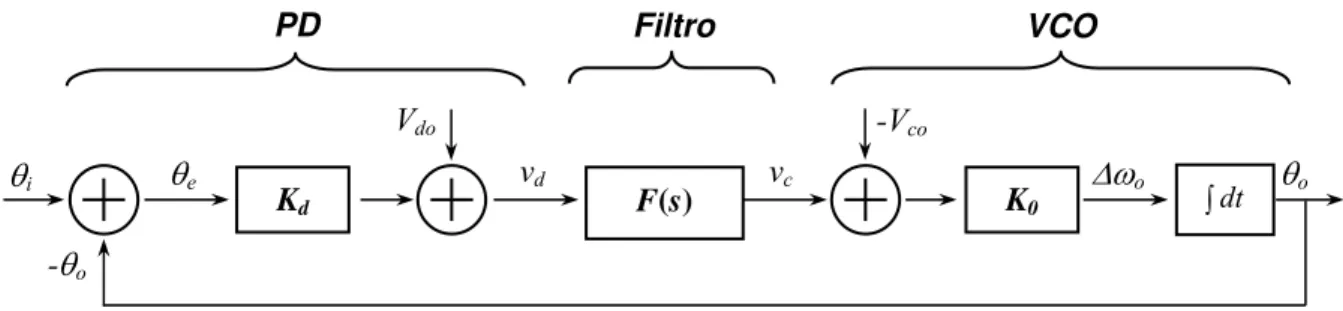
À medida que o erro vai diminuindo a fase do sinal do VCO vai aumentando até que o erro seja nulo. O modelo do PLL com a introdução do filtro é apresentado na figura 1.12.
Figura 1.12 – Modelo do PLL
Do modelo apresentado pode-se determinar a expressão do erro de fase estático, pois permite analisar a influência do tipo de filtro utilizado sobre θeo, têm-se que
Kd
Vdo
θi
-θo
θe vd
F(s) K0 ∫dt
vc
-Vco
∆ωo θo VCO
( )
o do( )
o co o de
o= ⋅K ⋅F s ⋅K +V ⋅F s ⋅K −V ⋅K
∆ω θ (1.17)
O erro de fase estático θeo é definido como sendo θe quando existe captura de sinal, ou seja
quando ∆ωo=0, obtêm-se
( )
0 F K V K V d co d doeo = + ⋅
θ (1.18)
1.5
Largu ra de Ban da
A largura de banda do PLL é a gama de frequência de trabalho que possibilita a existência da captura do sinal de entrada vi, sem perda excessiva de ganho. A largura de banda depende apenas da variação AC dos sinais do PLL. Pode-se reescrever o modelo do PLL apenas com as componentes AC, em que o integral do modelo do VCO é substituído pela sua transformada de Laplace. Para simplificação de análise considere-se a não existência do filtro. Obtêm-se o modelo representado na figura 1.13 [1].
Figura 1.13 – Modelo ac do PLL
O ganho do PLL em malha aberta é
s
K
K
)
s
(
G
=
d o (1.19)A largura de banda do PLL, ω3dB, é dada pela equação (1.20)
1
= ) j (
G
ω
(1.20)logo
o d dB
=
K
K
3
ω
do modelo apresentado também se pode determinar a função de transferência do modelo, dada por
Kd
θi
-θo
θe vd
Ko
vc ∆ωo θo
( )
) ( 1 ) ( ) ( ) ( s G s G s s s H i o + = = θ θ (1.21)caso se pretenda uma redução da largura de banda (p.e. para filtrar a componente de dupla frequência do modelo anterior), pode-se colocar um atenuador entre o PD e o VCO. Este atenuador é vulgarmente implementado com um divisor resistivo de ganho Kh, como mostra a figura 1.14.
Figura 1.14 – PLL com atenuador resistivo
Sendo o ganho do atenuador é dado por
(
1 2)
2
R
R
R
K
h=
+
(1.22)O novo valor da largura de banda do PLL é dado por
0 3dB
=
K
dK
hK
ω
Fazendo 0K
K
K
K
=
d hpode-se reescrever a função de transferência do sistema na forma
( )
K s K s s s H i o + = = ) ( ) ( θ θ (1.23)Um PLL com um atenuador deste tipo é designado por PLL de 1ª ordem. A ordem do PLL é determinada pela ordem do grau do denominador da função de transferência.
Este atenuador satisfaz a largura de banda desejada, no entanto afecta o comportamento estático (DC) do PLL, pois agora vc≠vd, e pela equação (1.23) aumenta o erro estático θeo. O ganho
DC do atenuador é no máximo igual à unidade, logo vai reduzir o valor da tensão de controlo do VCO, consequentemente diminui o intervalo de frequência de trabalho do VCO.
PD vi(θi)
-θo
vd vc vo(θo)
VCO R1
1.6
Filtro
Pode-se obviar o problema do aumento do erro estático introduzido pela malha atenuadora colocando um condensador entre a resistência R2 e a massa. Este conjunto filtra a componente AC do sinal vd, mas não atenua a componente DC, figura 1.15.
Figura 1.15 – PLL com Filtro passivo
Sendo a função de transferência do filtro dada pela equação (1.24)
p z h
s
s
K
)
s
(
F
ω
+
ω
+
⋅
=
(1.24)em que 2 1 2 R R R Kh + =
(
R
R
)
C
p
=
+
⋅
ω
2 11
C
R
z
=
⋅
ω
2
1
Consegue-se para baixas frequências F(0) = 1 e para altas frequências, maiores que ωZ,
( )
j KhF ω = como pretendido. A função de transferência do PLL é agora
( )
(
)
z p z i o K K s K Ks s s s H ω ω ω θ θ + + + + = = 2 ) ( ) ( (1.25)este é então um PLL de 2ª ordem.
PD vi(θi)
-θo
vd vc vo(θo)
VCO R1
R2
Da função de transferência do PLL, pode-se concluir sobre a estabilidade do sistema analisando a margem de fase. Grandes margens de fase, podem fazer decrescer a resposta do sistema e degradar o tempo de aquisição [4]. O diagrama de blocos do PLL no domínio s está representado na figura 1.16.
Figura 1.16 – Diagrama de blocos do PLL no domínio s
É usual descrever o sistema no domínio da frequência s de forma a analisar o seu comportamento. Uma vantagem de representar o PLL em blocos, é ter acesso a todos os sinais em qualquer ponto do PLL (PD, filtro, VCO). Deste modo, pode-se determinar a influência de perturbações ao longo do sistema sobre a saída do PLL. A resposta do PLL a essas perturbações dependerá essencialmente da largura de banda do PLL [4].
Em diversas aplicações pretende-se que o PLL tenha uma largura de banda elevada. A largura de banda depende do ganho de cada um dos blocos constituintes do PLL. A variação do ganho do PD ou do VCO é normalmente pouco flexível, assim fica apenas sobre o filtro, o engenho de conseguir ganhos elevados.
Como se mostrou, um filtro passivo tem ganho máximo igual à unidade. Quando se pretendem ganhos elevados a utilização de um filtro activo é indispensável, figura 1.17. Na implementação do filtro, existem três parâmetros a caracterizar, o ganho a altas frequências Kh, o posicionamento do zero que leva F(0) a infinito e o posicionamento do pólo.
Figura 1.17 - PLL com Filtro activo Kd
θi(s) θ
o(s) F(s)
Vd(s) Vc(s)
Ko / s
R2
PD vi(θi)
-θo
vd
vc vo(θo)
VCO R1
C
1.7
Co n diçõ e s para m an te r a Captu ra
Considere-se que existe captura do sinal (ωo= ωi), nesta situação pode dizer-se que o PLL se encontra num estado estático. Quando existe uma variação de fase (ou frequência) do sinal de entrada, o PLL deverá reagir de forma a capturar de novo o sinal de entrada.
Quando acontece uma variação lenta de frequência do sinal de entrada ωi, o VCO vai tentar acompanhar essa mesma variação desde que essa frequência esteja dentro do seu intervalo de trabalho e dependendo também do seu sinal de controlo vc.
Considere-se um PD e um VCO, cujas características estão representadas na figura 1.18. Existe duas restrições, que impedem o PLL de conseguir capturar novamente o sinal de entrada. A primeira e mais visível, prende-se com o facto de o novo valor de ωi, não poder exceder os limites da característica do VCO, ou seja, ultrapassar o intervalo de frequências de trabalho VCO. A segunda restrição reflecte-se no valor da tensão de controlo vc que depende do tipo de filtro utilizado no PLL. Recorde-se que
( )
dmáx máxc F V
v = 0 ⋅ (1.26)
Figura 1.18 – Característica do PD e do VCO
No caso de ser utilizado um atenuador, figura 1.14, é diminuído o intervalo de frequência de qual é possível seguir o sinal de entrada, pois F
( )
0 <1. Se for utilizado um filtro passivo, figura 1.15, consegue-se que vc = Vd, pois F( )
0 =1. No entanto pode-se estar a não aproveitar toda a característica(
volts)
d V
π θ π ≤ ≤
− e
(
volts)
c V
ωo
(Mrad/s)
máx e
do VCO, pois o VCO produz frequências superiores para vc > Vd. Com a utilização de um filtro activo, figura 1.19, consegue-se um aproveitamento pleno do VCO, pois F
( )
0 =∞.Figura 1.19 – PLL de 2ª ordem
Considere-se o PLL composto por um filtro activo, figura 1.19. Quando existe uma variação rápida de frequência do sinal de entrada, o PLL pode perder a captura mesmo que os limites do VCO não sejam ultrapassados. Isto deve-se ao facto de que para uma variação rápida de ωi F
( ) ( )
jω <F 0 , o que juntamente com a equação (1.26), representa uma restrição ao valor de vc. Este facto explica-se devido ao condensador não conseguir carregar durante o tempo em que houve variação de ωi.A frequência do sinal de entrada é agora ωi +∆ωi, onde ∆ωi representa a variação de frequência. Pela equação (1.16) pode-se representar a variação de frequência ∆ωi em função da fase do sinal
t d
d i
i
θ ω =
∆ (1.27)
É de interesse conhecer qual o valor de ∆ωi que leva o PLL a perder a captura e não conseguir recuperá-la.
Recorde-se novamente o PLL de 2ª ordem com filtro activo. O PLL perde a captura quando o erro de fase θeexcede o valor de θemáxque leva o PD a produzir Vdmáx, pedindo assim uma tensão
máx d
d V
V > , figura 1.18.
Recorrendo às equações (1.6) e (1.8) pode-se escrever a frequência do VCO, ωo, segundo a equação (1.28)
(
c co)
io
o K v V ω
ω = − + (1.28)
R2
PD
vi vd
vc vo
VCO R1
- +
pela figura 1.16, verifica-se que a tensão de controlo vc obedece à equação (1.29)
3
2 v
v
vc = + (1.29)
Quando existe captura
(
ωo =ωi)
, pela equação (1.28) vc =Vco. Este valor de tensão é disponibilizado pelo condensador que armazenou energia eléctrica durante a aquisição até v3 =Vco. Da equação (1.29) tem-se assim que v2 deve ser zero, masd h
d K V
V R R
v = ⋅ = ⋅
1 2
2 (1.30)
assim 0Vd = , e da característica do PD θe =0(assumindo 0Vdo = ). Quando acontece ∆ωi, para manter a captura, o VCO deve sofrer uma variação ∆ωoresultado de uma variação do valor da tensão de controlo ∆vc, pela equação (1.7)
o o c
K
v =∆ω
∆ (1.31)
Considere-se que o tempo de carga do condensador é muito maior do que o tempo da variação
i
ω
∆ . Segundo a equação (1.29), terá de ser o termo v2 o responsável por variar vc em ∆vc, assim
o c
K v
v2=∆ =∆ω (1.32)
por outro lado, pela equação (1.30)
o h h d K K K v V ⋅ ∆ =
= 2 ω (1.33)
se a variação de frequência ∆ω for pequena, Vd será pequena e não ultrapassará Vdmáx, e o PLL conseguirá de novo a captura.
A máxima variação ∆ω que poderá ocorrer, para que o PLL consiga voltar a capturar o sinal é designada por “lock frequency” ωL, têm-se assim
⇔ ⋅ = o h L d K K V ω o h d
L=V ⋅K ⋅K
ω (1.34)
de igual modo para um PD linear, figura 1.18, obtêm-se
K K K
Kd h o
e
ω ω
θ =∆
⋅ ⋅
∆
máx e d máx
d K
V = ⋅θ (1.36)
vem
máx e
L K θ
ω = ⋅ (1.37)
onde K é a largura de banda do PLL. O PLL deverá manter a captura para ∆ω<ωL.
1.8
Co n diçõ e s de Aqu is ição
Até ao momento em todas as situações consideradas, foi assumido que existia captura do sinal, isto é ωo =ωi. Contudo, quando o sinal de entrada vi é aplicado ao PLL as duas frequências são normalmente distintas. O processo de levar ωo até ωi designa-se por aquisição do sinal.
Figura 1.20 – PLL de 2ª ordem
Para simplificação de análise do processo de aquisição assuma-se que o sinal de entrada é caracterizado por frequência constante e fase nula (θi = 0). Para uma frequência ωi constante, à diferença entre ωo e ωi designa-se por erro de frequência ωe,
i o
e ω ω
ω = − (1.38)
num dos pontos anterior esta diferença era designada por desvio de frequência ∆ωo.
É importante conhecer as limitações que o PLL impõe às suas condições inicias, de forma a conseguir realizar a aquisição do sinal. Designa-se por pull-in rangeωp ao máximo erro de frequência
R2
PD
vi vd
vc vo
VCO R1
- +
- v2 + - v3 +
ωe para o qual o PLL consegue a aquisição do sinal [1]. Uma característica também importante, é conhecer o tempo de aquisição do sinal, designado por pull-in rangeTp.
Considere-se o PLL de 2ª ordem apresentado na figura 1.20. Neste tipo de PLL o componente com maior influência pela aquisição do sinal é o condensador. O detector de fase é o responsável pela carga ou descarga do condensador. Deve haver uma componente DC no sinal de saída do PD, por mais pequena que seja, e a sua polaridade deve ser tal que pela carga ou descarga do condensador leve o VCO a produzir uma frequência ωo que se aproxime de ωi. À componente DC, ou valor médio de vd, durante a aquisição é designada por pull-in rangevp.
Considere-se o PD com uma característica triangular, representada na figura 1.18. Assumindo sem perda de generalidade que o sinal de entrada tem fase nula, o erro de fase é dado pela equação (1.39)
o o i
e θ θ θ
θ = − =− (1.39)
Quando não existe captura ωo ≠ωi e o erro de frequência é diferente de zero, têm-se
dt d dt
d o e
e
θ θ
ω = =− (1.40)
O erro de fase vai crescer ou decrescer tendendo para zero, dependendo se a diferença de fase é negativa ou positiva. Para a característica triangular apresentada, têm-se
e d
d K
v = ⋅θ (1.41)
a tensão aos terminais de R2 é
e d h d
h v K K
K
v2= ⋅ = ⋅ ⋅θ (1.42)
e a tensão de controlo vc
3 3
2 v K K v
v
vc = + = h⋅ d ⋅θe + (1.43)
Se existir um valor de θe para o qual vc permita ωe =0 o PLL consegue a captura da fase do
sinal. Sem perda de generalidade assuma-se que vc =0 implica um erro de frequência ωe =0. Têm-se assim um VCO com uma característica que obedece à equação (1.44)
c o e =K ⋅v
ω (1.44)
substituindo a equação (1.43) na equação (1.44), obtêm-se
3
v K K
K
Ko h d e o
e = ⋅ ⋅ ⋅θ + ⋅
c e
e K θ ω
ω = ⋅ + (1.46)
onde ωcé o erro de frequência devido à tensão aos terminais do condensador v3. Para o caso em que θi =0
c e
e K
dt
dθ θ ω
+ ⋅ =
− (1.47)
Da equação anterior consegue-se uma interpretação da variação do erro de fase θe em função de θe. Quando θe ≈π 2, ωe é elevado, o que significa uma rápida variação de θe. Quando
2 π
θe ≈− , ωe é pequeno, havendo uma variação lenta de θe. Para ocorrer a aquisição v3deve
diminuir, diminuindo ωc, até a característica atingirωe =0. Segundo Wolaver [1], têm-se
c d p K K v ω ⋅ ⋅ − = 2 ,
1 (1.48)
Para um elevado erro de frequência ωca assimetria de vdé reduzida, logo a tensão vpé pequena. Consequentemente o condensador descarrega lentamente e ωc decresce lentamente. A aquisição é conseguida quando ωe =0 par um determinado valor de θe, de acordo com as equações (1.45) e (1.46)
e o h d
c K K K θ
ω = ⋅ ⋅ ⋅
max
d o h
c =K ⋅K ⋅V
ω (1.49)
A esta frequência designa-se por lock-in rangeωL
max
d o h
L =K ⋅K ⋅V
ω (1.50)
é o erro máximo de frequência para o qual o PLL consegue fazer a aquisição do sinal. No ponto anterior, esta frequência era a variação máxima de frequência para a qual o PLL conseguia manter a captura.
O erro ωc varia de acordo com a capacidade de o condensador carregar através da corrente i. Assim
3
V Ko
c = ⋅
z h p o d o o o c K v K C R v K C i K dt V K dt d ω ω ⋅ ⋅ ⋅ = ⋅ ⋅ = ⋅ = ⋅ = 1 3 (1.51) em que 1 2 R R Kh =
C R
z = ⋅
2
1 ω
substituindo a equação (1.48) em (1.51), vem
c z z h c d o
c K K K K K
dt d ω ω ω ω ω ⋅ ⋅ − = ⋅ ⋅ ⋅ ⋅ ⋅ − = 2 , 1 2 , 1
2 (1.52)
dt K
d c z
c ⋅ =− ⋅ ⋅
⋅ω ω 2 ω
2 , 1
integrando ambos os membros, obtêm-se a equação (1.53)
2 2
2
2 ,
1 ⋅ωc =−K ⋅ωz ⋅t+ωeo (1.53)
onde ωeo2 é a constante de integração tal que ωc =ωeo para t = 0.
Chama-se pull-in time Tp ao tempo necessário para que ωcchegue ao valor de ωL.
Resolvendo a equação (1.43) para ωc =ωL=K⋅
( )
π 2 , vem [1](
)
z eo p K T ω ω ⋅ − = 6 , 1 5 , 2 2 (1.54)Ao maior erro ωcpara o qual o PLL consegue a aquisição do sinal, chama-se pull-in range
p
ω . Supondo que o PD na ausência de sinal aplicado apresenta uma tensão na saída Vdo. Durante o
processo de aquisição o valor médio de vdé
c d do p do
d V v V K K
v ω ⋅ ⋅ − = + = 2 ,
1 (1.55)
Se ωc for pequeno, vd é negativo e o PLL faz a aquisição do sinal. Por outro lado, se ωc for
elevado, vd é positivo e o erro de frequência ωc aumenta. Assim ωp é o valor de frequência para o
qual vd =0, da equação (1.55) obtêm-se
do d p V K K ⋅ ⋅ = 2 , 1
1.9
Co n clu s õ e s
O PLL é um sistema electrónico amplamente utilizado, como tal é fundamental o estudo no que diz respeito ao seu comportamento. É composto por três blocos; o detector de fase, o filtro e o oscilador controlado por tensão, os quais foram apresentados individualmente. Os detectores de fase analógicos têm um funcionamento típico de um multiplicador. Os detectores de fase digitais têm comportamento sobejamente conhecido, tornando o estudo destes circuitos dispensável neste trabalho.
Por sua vez, o filtro e o oscilador controlado por tensão (VCO) são tipicamente circuitos analógicos, tornando-se necessário conhecer um modelo do seu comportamento de forma a possibilitar a simulação a nível comportamental.
Dos dois tipos de filtros apresentados, passivo e activo, os passivos são os preferidos para aplicação em PLLs. Com efeito, os filtros do tipo passivo são menos sujeitos ao aparecimento de ruído e menos onerosos em comparação com os do tipo activo. O tipo de filtro adoptado num PLL, poderá influenciar a largura de banda deste último. Tipicamente os filtros utilizados são de primeira ou segunda ordem, pois a função de transferência para filtros de ordem superior torna a análise comportamental do sistema mais complexa.
O oscilador controlado por tensão é aqui caracterizado por possuir um comportamento linear. Esta aproximação permite simplificar o estudo do desempenho do VCO, pois neste caso, o VCO é caracterizado por possuir um ganho DC constante.
Capítu lo 2
Filtro s
2 .1
In tro du ção
Os filtros são blocos utilizados em diversos sistemas electrónicos. São blocos imprescindíveis na generalidade dos circuitos de transmissão e recepção de sinal, como PLLs, nomeadamente para a rejeição de ruído, ou na implementação de moduladores/desmoduladores.
A forma mais simples, e mais comum, de caracterizar o comportamento de um filtro é através do cálculo da função de transferência, equação (2.1), no domínio da frequência. Ou seja, o estudo do bloco pode ser feito directamente a partir da relação entre o sinal de saída e o sinal de entrada.
( )
( )
( )
s v
s v s T
i o
= (2.1)
Figura 2.1 – Filtro genérico
Existem duas famílias distintas de filtros, os filtros passivos e os filtros activos. Os filtros passivos são realizados usando apenas componentes passivos, isto é, resistências, condensadores e/ou bobinas. Os filtros activos utilizam componentes activos, tais como AMPOPs, transconductores, ou simples transístores, em conjunto com os componentes passivos, de forma a realizar as funções de filtragem. Os filtros passivos são mais simples de realizar e não necessitam de um circuito de alimentação e/ou de polarização.
Em PLLs, os filtros passivos são geralmente mais utilizados do que os activos, devido a estes últimos provocarem maior aparecimento de ruído e serem mais caros. OS filtros mais comuns são os de primeira e segunda ordem.
A utilização de um bloco de filtragem no PLL, tem geralmente como objectivo eliminar a componente AC do sinal a aplicar ao VCO. Assim, de entre os tipos de filtro passivos, os filtros passivos passa-baixo são os utilizados.
2 .2
Filtro pas s ivo pas s a-baixo
Os circuitos passivos básicos utilizados para realizar um filtro passa-baixo são o circuito RL série e o circuito RC série. Caso o sinal de entrada seja uma fonte de corrente, os circuitos usados são os circuitos duais resultantes da aplicação do teorema de Norton, ou seja, o circuito RL paralelo e o circuito RC paralelo. A figura 2.2 representa dois destes circuitos.
Filtro T(s) +
Vi(s)
-+ Vo(s)
-Figura 2.2 – Filtros passivos passa-baixo de 1ª ordem
Tipicamente em um PLL, a função de transferência do filtro relaciona a tensão de saída, com a corrente de entrada do filtro, ou seja, a impedância do filtro, equação (2.2). A primeira porque o sinal de saída do filtro é aplicado ao VCO, composto por transístores CMOS que não possui correntes de entrada. A segunda porque o sinal proveniente do detector de fase com “charge-pump” é em corrente.
( )
( )
( )
s I s V s Z i o = (2.2)Em [4] é apresentada a topologia da figura 2.3 para a realização do filtro passa-baixo. Esta topologia é adoptada, pois permite apresentar uma função de transferência genérica, passível de representar a função de transferência de filtros até à quarta ordem.
Figura 2.3 – Filtro passivo de 3ª ordem
A função de transferência do filtro da figura 2.3 é
( )
(
) (
)
3 1 2 1 1 1 T s T s s C T s s Zt ⋅ ⋅ + ⋅ ⋅ + ⋅
⋅ +
= (2.3)
A equação (2.3) é válida para filtros de várias ordens. A tabela 2.1, indica o valor dos parâmetros da função de transferência para filtros de segunda a quarta ordem [4].
Parâmetros Filtro 1ª ordem Filtro 2ª ordem Filtro 3ª ordem
T1 2⋅R2⋅C2
t C
C C R2⋅ 2⋅ 1
t C
C C R2⋅ 2⋅ 1
T2 R2⋅C2 R2⋅C2 R2⋅C2
T3 0 0 R3⋅C3
Ct
2
1
R
C1+C2 C1+C2 +C3Tabela 2.1 – Parâmetros da função de transferência
Existem dois parâmetros que caracterizam um filtro, a largura de banda e a margem de fase. A largura de banda é o parâmetro crítico de um filtro, para aplicação em um PLL. Pois, a largura de banda está directamente relacionada com o tempo de aquisição do PLL. Deve-se escolher uma largura de banda para o filtro, que seja suficiente para satisfazer os requisitos de captura com margem suficiente e eliminar o possível ruído.
A margem de fase é indicadora da estabilidade do filtro. Resultados indicados por [4], demonstraram que uma margem de fase entre 40º e 55º graus, assegura um óptimo tempo de aquisição.
Sem perda de generalidade para o filtro de primeira ordem e particularizando para um filtro de segunda ordem, a função de transferência do filtro segundo a equação (2.3) é
( )
(
)
1 2 1 1 T s s C T s s Zt ⋅ ⋅ + ⋅
⋅ +
= (2.4)
Para a caracterização do filtro é necessário determinar as constantes de tempo da equação (2.4). Em [4] é proposta a equação (2.5).que relaciona a margem de fase φ com os pólos e zeros do sistema.
(
2)
(
1)
180+arctg c⋅T −arctg c ⋅T
= ω ω
φ (2.5)
De forma a maximizar a margem de fase para uma dada largura de banda (frequência de corte, ωc), derivando a equação (2.5), obtêm-se a equação (2.6)
2 1 2 1 2 2 2 2 1 1 0 T T T T d d c c c c
c + ⋅
As equações (2.5) e (2.6) formam um sistema de duas equações a duas incógnitas, logo é um sistema solúvel. A capacidade total Ct determina-se igualando o ganho em malha aberta à unidade, para a frequência de corte ωc.
( )
s =1Z (2.7)
No caso do filtro passivo de 2ª ordem, apresentado, vem
(
)
(
2)
1 2
2 2 2
1 1
T T C
c c
c t
⋅ + ⋅
⋅ + =
ω ω
ω
(2.8)
2 .3
Co n clu s õ e s
De entre os dois tipos de filtro existentes, o filtro passivo é o usualmente usado para aplicações em PLLs. Estes são menos sujeitos ao aparecimento de ruído provocado pelo próprio filtro, de realização simples e mais económica, quando comparados com os filtros activos.
Capítu lo 3
Os cilado r Co n tro lado
po r Te n s ão - VCO
3 .1
In tro du ção
A implementação de um Oscilador Controlado por Tensão (em inglês Voltage Controlled Oscillator - VCO) implica ter cuidados especiais com os factores que possibilitam uma variação indesejada da frequência de oscilação, variações da tensão de alimentação, a possibilidade de jitter, variação da temperatura e até mesmo variações no processo de fabrico podem influenciar a frequência de oscilação do VCO.
sintonização reduzida, torna-os pouco atractivos. Os osciladores em anel, não obstante sejam piores do ponto de vista de ruído de fase, são preferencialmente usados em aplicações em que as especificações relativamente à frequência de sinal são muito rigorosas, como nos sintetizadores RF em aplicações em fios [21][17]. Os osciladores em anel apresentam ainda a vantagem de ocuparem menor área e, se implementados com um número par de andares, oferecerem a possibilidade de gerar sinais em fase e quadratura [20]. A estrutura de um VCO em anel está representada na figura 3.1.
Figura 3.1– Estrutura de um VCO em anel
Neste capítulo serão apresentadas quatro topologias de células de atraso de VCOs em anel. Será realizada uma descrição do funcionamento da célula de atraso de cada topologia. Não serão esquecidas algumas considerações quanto aos limites de operação de cada topologia. A célula de atraso deverá também ser caracterizada por ter um ganho adequado, operar em baixa tensão e um controlo linear da frequência de oscilação [5].
3 .2
Caracte rís ticas das cé lu las de atras o
3 .2 .1
Gan h o
análise do comportamento linear do VCO que se determina a frequência de oscilação da célula de atraso. Considere-se a figura 3.2, representativa da arquitectura genérica de um oscilador.
Figura 3.2 – Arquitectura genérica de um VCO
Considere-se Hn(s) a função de transferência de cada célula de atraso e H(s) a função de transferência das N células de atraso que compõem o VCO. A função de transferência em malha fechada é
( )
( )
1( )
( )
s s s s H H v v in out + = (3.1)De acordo com o critério de Barkhausen, para uma dada frequência de oscilação ω0, é necessário que o VCO satisfaça duas condições de forma a garantir uma oscilação estável. Assim é necessário que o ganho em malha aberta seja superior à unidade
(
jω0)
≥1H (3.2)
e possuir uma margem de fase igual a π.
(
)
=π∠H jω0 (3.3)
Para um VCO com N células de atraso, obtêm-se
(
)
N p j A H ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ + = ω ω0 0 0 1jω (3.4)
por outro lado têm-se que
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = p arctg N ω ω
φ 0 (3.5)
H1(s)
vin vout
H2(s) Hn(s)
- +
das equações (3.4) e (3.5) determina-se que o ganho em malha aberta para a frequência de oscilação ω0, deverá obedecer à equação (3.6)
N sec
A0 > 2 π (3.6)
Ao ser necessário um ganho mínimo para que o VCO possua uma oscilação estável, este irá ser um factor que limitará o intervalo de frequências de trabalho do VCO.
3 .2 .2
Cé lu las de atras o
As células de atraso devem ser caracterizadas por um tempo de atraso, ou frequência de oscilação bem definido e idêntico para todos os N andares que componham o oscilador. O atraso da célula deve ser ajustado por uma tensão de controlo. Idealmente deveria ser essa tensão Vctrl a única variável a influenciar o tempo de atraso. No entanto assim não acontece, pois o tempo de atraso da célula é afectado por factores externos, sendo os mais relevantes as variações de tensão na fonte e substrato dos transístores. Estas variações afectam o tempo de atraso, ou frequência de oscilação o que leva a ao aparecimento de jitter. Uma das considerações a ter no desenvolvimento do VCO é minimizar a sensibilidade a perturbações externas.
Devido ao avanço da microelectrónica, tem vindo a ser um desafio a implementação de VCO a reduzida tensão de forma a permitir que se realizem em circuito integrado, evitando desta forma alguns dos problemas existentes na implementação ao nível de circuito impresso. O VCO deve permitir a variação de frequência sob um controlo linear de modo a garantir uma melhor estabilidade ao PLL.
Uma célula de atraso é na sua forma mais simples a apresentada na figura 3.3. Esta é constituída por um par diferencial NMOS, por duas cargas resistivas e uma fonte de corrente apenas composta por um transístor NMOS.
O controlo do tempo de atraso da célula é basicamente feito por variação da resistência efectiva da carga. A variação das capacidades não é comum pois estas são praticamente determinadas por construção da célula. Uma possível variação das capacidades será mínima, logo pouco influente na variação do tempo de atraso. Assim a resistência terá de ser ajustável. No entanto os transístores MOS apresentam uma característica I−V não linear, quando se considera toda a variação de excursão de sinal [7].
A célula de atraso apresentada na figura 3.3, apresentará um bom controlo linear sob o tempo de atraso e uma boa rejeição ao ruído provocado pela fonte de alimentação, se a carga resistiva apresentar um razoável comportamento linear e for pouco sensível ao ruído. Neste tipo de células de atraso, as cargas são tipicamente compostas por transístores PMOS.
Figura 3.3 – Célula de atraso com arquitectura diferencial
do substrato, diminui-se a dependência da tensão de controlo ao ruído, pois este influência a tensão de “threshold”, Vt. Normalmente os transístores NMOS são preteridos em função dos PMOS quando é necessário aplicar um sinal externo ao circuito.
Outra questão que se coloca neste tipo de circuito, prende-se com a sensibilidade da fonte de corrente NMOS utilizada. A excursão do sinal é dependente da tensão de alimentação. Tendo em consideração a célula da figura 3.3, é perceptível que uma variação da fonte faz variar a tensão de dreno da fonte de corrente. Devido à limitação da impedância de saída da fonte de corrente, irá haver uma variação da corrente, logo uma variação na frequência de oscilação. Este problema será ultrapassado com um circuito de polarização, que será apresentado neste capítulo. Outras técnicas, como o uso de fontes em cascata são também utilizadas, limitando a tendência de realizar circuito a reduzida tensão.
No próximo ponto deste capítulo serão apresentadas algumas topologias de células de atraso, as quais podem ser classificadas em dois tipos quanto à zona de funcionamento dos dispositivos CMOS: do tipo saturado e não saturado. No tipo saturado, os transístores CMOS que compõem as células de atraso, podem funcionar como interruptores, isto é, metade dos transístores que compõem a célula estão desligados enquanto a outra metade se encontra na zona de condução. Este tipo de células embora apresentem um bom desempenho quanto ao ruído, tem a desvantagem de manifestar uma característica não linear [8], factor indesejável para o controlo da frequência de oscilação. Por outro lado nas células de tipo não saturado, todos os transístores estão sempre em condução. Devido a esta característica, estas células de atraso apresentam um comportamento idêntico ao de um amplificador linear, sendo caracterizadas por um modelo linear [8].
Outra arquitectura diferencial é apresentada em [7]. A célula de atraso com carga simétrica é proposta. Os transístores PMOS em simetria apresentam uma elevada linearidade de operação. Permite também controlar o atraso da célula, por meio da tensão de controlo aplicada à carga. Uma única equação é determinada de forma a representar a frequência de oscilação. Esta é baseada nas equações de corrente para a região de funcionamento dos transístores da célula de atraso. As capacidades parasitas associadas à tecnologia CMOS, assim como a resistência efectiva da carga em simetria, são também tidas em consideração.
Em [8] é também apresentada uma arquitectura diferencial para uma célula de atraso. Esta célula é do tipo saturado, com entrada dupla de sinal de forma a diminuir o ruído de fase e tornando mais rápida a comutação dos transístores. O principal objectivo desta estrutura é diminuir o tempo de atraso da célula, logo aumentar a frequência de oscilação.
Uma arquitectura diferencial com carga simétrica é proposta em [9]. Caracterizada por elevada frequência de trabalho, a rondar os 900 MHz, baixo consumo, baixo sensibilidade ao ruído de fase e rápida comutação. É apresentada uma equação para a frequência de oscilação com base nas transcondutâncias do circuito e nas capacidades parasitas associadas.
3 .3
1ª Arqu ite ctu ra (W e igan dt - 19 9 8 )
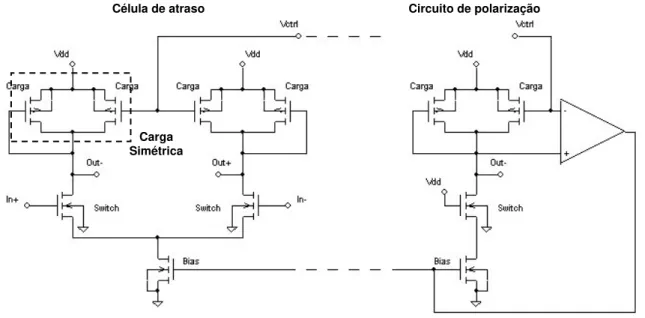
A arquitectura proposta em [2] para o Oscilador Controlado por Tensão (VCO) é a apresentada na figura 3.4. O VCO é composto por N células de atraso em montagem diferencial e por um circuito de polarização de modo a ajustar o nível de tensão nas gates dos transístores PMOS, permitindo fixar a excursão do sinal de saída do VCO. O circuito de polarização, impõe uma tensão na gate dos transístores PMOS de forma a que quando o circuito de polarização é percorrido pela corrente
ISS apresente VDSPMOS =VSW .
SS SW L d
I V C
t = (3.7)
onde CL representa a capacidade vista da saída.
Figura 3.4 – Célula de atraso com arquitectura diferencial
Se a corrente ISS for variável e VSW mantido constante através do circuito de polarização obtêm-se assim uma variação do tempo de atraso da célula, logo uma variação da frequência. Mantendo as cargas na zona de tríodo e variando a corrente, é como variar a resistência da carga e assim variar tdcomo referido.
É desejável manter as cargas PMOS numa boa zona da região de tríodo, de forma a obter uma característica linear de resistência, figura 3.5. Deste modo é desejado um VDS elevado, ou seja, um pequeno VSW, pois para se manter na região de tríodo terá de se verificar a condição da equação (3.8).
(
VDD−Vout)
max ≤VGS −VTP (3.8)Os transístores do par diferencial funcionam como interruptores (“switch”), quando em condução trabalham na região de saturação.
+ Vsw
Vref =
Vdd - Vsw
Iss