Cobertura,
Conectividade e
Requisitos de uma
Rede de Sensores
sem Fios
Vítor Daniel Peixoto de Sousa
Mestrado integrado em Engenharia de Redes e Sistemas Informáticos
Departamento de Ciência de Computadores2013/2014
Orientador
Engº Gil Gonçalves, Grupo de Engenharia da Decisão e Controlo ISR - FEUP
Coorientador
Todas as correções determinadas pelo júri, e só essas, foram efetuadas.
O Presidente do Júri,
4
Aos meus pais,
Agradecimentos
Agradec¸o a todos os que contribu´ıram e me incentivaram para o desenvolvimento deste projeto, a toda a equipa do laborat ´orio LSTS, agradec¸o a boa recec¸ ˜ao e o bom ambiente prestado ao longo de todo o est ´agio.
Quero deixar um agradecimento especial ao Professor Engenheiro Gil Gonc¸alves pela orientac¸ ˜ao e por todos os conhecimentos partilhados, fica tamb ´em um agradecimento especial ao Engenheiro Jo ˜ao Reis e ao meu amigo Luis Neto pela disponibilidade e apoio no esclarecimento de todas d ´uvidas durante o desenrolar da dissertac¸ ˜ao.
Por fim, mas n ˜ao menos importante, agradec¸o `a minha fam´ılia, namorada e amigos mais pr ´oximos o afeto e o apoio incondicional demonstrados.
Um muito obrigado.
Resumo
O tema redes de sensores sem fios tem sido frequentemente abordado por diversas en-tidades devido ao seu uso intensivo nos dias de hoje. O futuro da computac¸ ˜ao e da comunicac¸ ˜ao depende da evoluc¸ ˜ao e inovac¸ ˜ao deste tipo de redes que atualmente s ˜ao utilizadas com diferentes prop ´ositos no nosso dia-a-dia com o conceito de Internet of Things, na ´area ambiental, militar e entre muitas outras, na ´area e setor Industrial.
Esta dissertac¸ ˜ao descreve o trabalho realizado ao longo de largos meses e consistiu na elaborac¸ ˜ao de um servic¸o no ˆambito do setor industrial, com funcionalidades que permitem atuar em fases importantes de um sistema de produc¸ ˜ao reconfigur ´avel nomeadamente a fase de controlo e de configurac¸ ˜ao, contribuindo ainda com uma ajuda importante na fase de planeamento de uma rede de sensores sem fios. A cobertura, a conectividade e os requisitos de uma rede de sensores sem fios s ˜ao o foco principal deste servic¸o, sendo o seu objetivo prim ´ario obter uma configurac¸ ˜ao de uma RSSF para uma determinada ´area, de maneira a alcanc¸ar uma cobertura ´otima da mesma e garantir a conectividade da rede, distribuindo os dispositivos em locais espec´ıficos. Para alcanc¸ar este objetivo, contribuiu o fato do servic¸o estar encapsulado como um bundle na arquitetura SmartComponent, que lhe permite ter acesso e interagir diretamente com os servic¸os que est ˜ao dispon´ıveis na rede, faz com que possa calcular os seus resultados utilizando par ˆametros obtidos diretamente dos dispositivos registados no sistema.
O resultado foi um servic¸o capaz de tratar todos os dados importantes e gerar uma soluc¸ ˜ao com a garantia de obtenc¸ ˜ao de informac¸ ˜ao fidedigna e em tempo real de todos os atores da RSSF, servir ´a n ˜ao s ´o para obter resultados r ´apidos e mais fi ´aveis, como tamb ´em ajudar ´a na an ´alise dos requisitos pretendidos para a aplicac¸ ˜ao, com a verificac¸ ˜ao da precis ˜ao dos servic¸os prestados bem como o raio de alcance dos sensores utilizados. No contexto de produc¸ ˜ao de uma linha industrial, determinismo em relac¸ ˜ao a decis ˜oes de controlo sobre uma c ´elula de produc¸ ˜ao, ´e uma caracter´ıstica fundamental. Este trabalho pretende contribuir nesse ˆambito, reforc¸ando a confianc¸a nas decis ˜oes de controlo, por sua vez tornando ainda mais pr ´oximo o objetivo de conseguir uma SmartFactory.
Palavras-chave: Rede de Sensores sem Fios, Cobertura, Conectiviade.
Abstract
The wireless sensor networks (WSN) theme has been frequently addressed by several entities due to its intensive use nowadays. The usefulness and functionality provided by these network systems, in such diverse and wide areas and sectors, is what made them so popular. The future of both computing and communication depend on the evolution and innovation of these types of networks which are currently used with different purposes, namely in the environmental and military areas and also in industrial applications.
This dissertation describes the work of several months, which consisted in the development of an industrial sector service with functionalities that allow the user to reconfigure the production system during important phases, namely the configuration and control phase, while also providing significant help in the planning phase of a wireless sensor network. The WSN’s coverage, connectivity and its requirements are the main focus of this service and its prime objective is to obtain an RSSF configuration for a given area, so that its coverage is optimal, and network connectivity is guaranteed by placing the devices in specific locations. The fact that the service was encapsulated as a bundle in the SmartComponent architecture allowed it to have access to, and interact directly with, the services available in the network, thus making it possible for the results to be calculated using parameters obtained directly from the devices registered in the system.
The result was an app/service, capable of processing data, and the development of a solution guaranteed to gather reliable real time information from every component of the WSN, not only obtaining faster and more reliable results but also providing help in the analysis of the app’s prerequisites through the verification of the service’s accuracy as well as the range of the sensors used. In the industrial line context, accuracy is essential in regards to control decisions of a production cell. This paper aims to contribute in that scope, reinforcing trust in control decisions, which in turn aims to enhance a SmartFactory development.
Keywords: Wireless Sensor Network, Coverage, Connectivity.
“Coming together is a beginning; keeping together is progress; working together is success” Henry Ford
Conte ´
udo
Agradecimentos 5 Resumo 6 Abstract 7 Lista de Tabelas 12 Lista de Figuras 14 1 Introduc¸ ˜ao 15 1.1 Contexto . . . 161.2 Motivac¸ ˜ao e Objetivos . . . 17
1.3 Estrutura da dissertac¸ ˜ao . . . 19
2 Problema 20 2.1 Contexto Industrial . . . 20
2.1.1 Reconfigurable Manufacturing System (RMS) . . . 20
2.1.2 I-RAMP3 . . . 21
2.1.3 SelSus . . . 21
2.2 Requisitos . . . 22
3 Estado da Arte 24 3.1 Redes de sensores sem fio (RSSF) . . . 24
3.1.1 Areas e setores de aplicac¸ ˜ao . . . .´ 25
3.1.2 Caracter´ısticas das RSSF . . . 26 3.1.2.1 Configurac¸ ˜ao . . . 26 3.1.2.2 Monitorizac¸ ˜ao . . . 27 3.1.2.3 Comunicac¸ ˜ao . . . 27 3.1.2.4 Processamento . . . 29 3.1.2.5 Energia . . . 29
3.1.3 Componentes, padr ˜oes e tecnologias . . . 30 9
3.1.3.1 Dispositivos . . . 30
3.1.3.2 Padr ˜oes . . . 32
3.1.3.3 Sistemas Operativos . . . 33
3.2 Cobertura e conectividade de uma RSSF . . . 34
3.2.1 Modelos de Cobertura . . . 35
3.2.2 Modelos de Conectividade . . . 38
3.2.3 Controlo de cobertura e conectividade . . . 39
3.2.4 Mobilidade . . . 40
3.2.5 Distribuic¸ ˜ao e organizac¸ ˜ao dos dispositivos . . . 41
4 Desenho e Implementac¸ ˜ao 44 4.1 Tecnologias . . . 45
4.1.1 JAVA . . . 45
4.1.2 Universal Plug and Play - UPnP . . . 45
4.1.3 Open Service Gateway initiative - OSGi . . . 46
4.1.4 JAXB . . . 46
4.2 Implementac¸ ˜ao . . . 47
4.2.1 Fase de Planeamento . . . 47
4.2.1.1 Vizinhos . . . 52
4.2.2 Fase de distribuic¸ ˜ao . . . 53
4.2.2.1 Tipos de Movimento . . . 53
4.2.2.2 Prioridades . . . 54
4.2.2.3 Regras para resoluc¸ ˜ao de problemas com fronteiras . . . 55
4.2.2.4 C ´odigo do Algoritmo . . . 60
4.3 Enquadramento do servic¸o na arquitetura - Comunicac¸ ˜ao . . . 63
4.3.1 Arquitetura SmartComponent . . . 63
4.3.2 Universal Plug and Play . . . 64
4.3.3 Device Integration Language . . . 64
4.3.3.1 NetDev Service Description . . . 65
4.3.3.2 Task Description Document . . . 66
4.3.3.3 Quality Result Document . . . 67
4.3.3.4 Task Fullfilmente Document . . . 68
4.4 M ´etodos, func¸ ˜oes, output . . . 69
4.4.1 Cobertura de ´area . . . 69
4.4.2 Cobertura de ´area com Obst ´aculos . . . 70
4.4.3 Verificac¸ ˜ao de Requisitos . . . 70
4.4.4 Comunicac¸ ˜ao DIL . . . 71
6 Conclus ˜oes e trabalho futuro 80
A Acr ´onimos 82
B Ficheiro NSD 83
Lista de Tabelas
3.1 Fluxo de informac¸ ˜ao. Comunicac¸ ˜ao em redes de sensores sem fios. [1] . . . 28 4.1 Posic¸ ˜oes normais dos seis vizinhos de um dispositivo . . . 52
Lista de Figuras
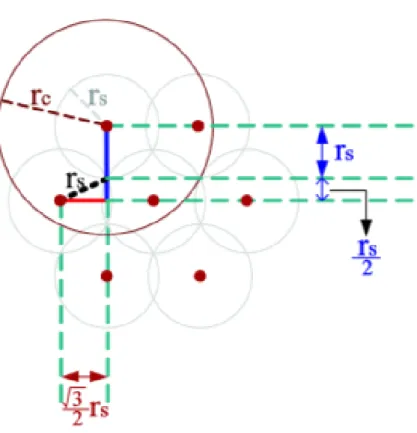
3.1 Componentes do dispositivo . . . 30 4.1 Planeamento da RSSF quando Rs> Rc . . . 48 4.2 Planeamento da RSSF quandoRs= Rc . . . 49 4.3 Planeamento da RSSF quando Rs< Rc≤√3Rs . . . 50 4.4 Planeamento da RSSF quando Rc> √ 3Rs . . . 514.5 Vizinhos de um dispositivo, Distribuic¸ ˜ao em forma de hex ´agono . . . 52
4.6 Tipos de movimento usados . . . 53
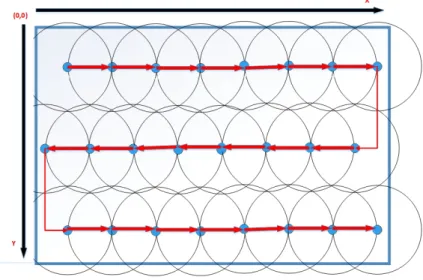
4.7 Distribuic¸ ˜ao de dispositivos sobre uma ´area . . . 54
4.8 Prioridades . . . 55
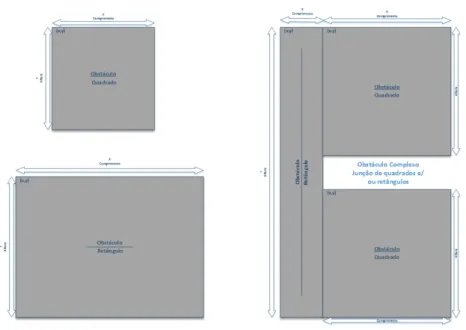
4.9 Representac¸ ˜ao de obst ´aculos . . . 56
4.10 Resoluc¸ ˜ao de problema na fronteira lateral . . . 56
4.11 Resoluc¸ ˜ao de problema na fronteira lateral de obst ´aculos . . . 57
4.12 Regra fronteira da ´area para movimentos tipo 3 e 4 . . . 58
4.13 Regra fronteira do obst ´aculo para movimentos tipo 3 e 4 . . . 59
4.14 Regra fronteira da ´area para movimentos tipo 5 e 6 . . . 59
4.15 Regra fronteira do obst ´aculo para movimentos tipo 5 e 6 . . . 60
4.16 Prioridades de movimentos efetuados na distribuic¸ ˜ao de dispositivos . . . 60
4.17 Comunicac¸ ˜ao via UPnP - Device Spy . . . 64
4.18 Parte do Ficheiro NetDev Service Description . . . 65
4.19 Parte do Ficheiro NetDev Service Description . . . 66
4.20 Ficheiro Task Description Document . . . 67
4.21 Ficheiro Quality Result Document . . . 67
4.22 Ficheiro Task Fullfilmente Document . . . 68
5.1 Distribuic¸ ˜ao quando Rs= Rc . . . 74
5.2 Distribuic¸ ˜ao quando Rs< Rc≤√3Rs . . . 75
5.3 Distribuic¸ ˜ao quando Rc> √ 3Rs . . . 76
5.4 Distribuic¸ ˜ao quando Rs> Rc . . . 77
5.5 Distribuic¸ ˜ao sobre obst ´aculos . . . 78
5.6 Distribuic¸ ˜ao sobre obst ´aculos simples . . . 79 13
Cap´ıtulo 1
Introduc¸ ˜ao
As redes de sensores sem fios (RSSF) s ˜ao uma das tecnologias mais importantes de momento e est ˜ao cada vez mais presentes no nosso quotidiano. A sua aplicabilidade est ´a ligada ao limite da nossa imaginac¸ ˜ao e, grac¸as a sua escalabilidade, modularidade e possibilidade de uma pan ´oplia de funcionalidades, estas redes s ˜ao hoje utilizadas para desempenhar um enorme leque de tarefas e func¸ ˜oes.
O fant ´astico poder que este tipo de redes ´e capaz de fornecer a qualquer tipo de servic¸o ou aplicac¸ ˜ao faz com que seja um dos temas mais investigados na atualidade, e uma tecnologia bastante procurada por imensas entidades nas mais variadas ´areas e setores. A investigac¸ ˜ao e a ind ´ustria de v ´arios pa´ıses atribuem uma grande import ˆancia `as redes de sensores sem fios, que ´e considerada como uma das mais influentes tecnologias do s ´ec. XXI, no entanto, por vezes ´e ainda necess ´ario ultrapassar uma certa barreira mental que poder ´a existir no que toca `a utilizac¸ ˜ao de redes de sensores sem fios aliada `a ind ´ustria. Apesar de tudo, as RSSF ainda n ˜ao s ˜ao uma abordagem direta quando falamos no setor industrial, ou seja, estes sistemas ainda n ˜ao s ˜ao a primeira escolha para a resoluc¸ ˜ao dos problemas associados ao shop-floor.
V ´arios aspetos e atributos fazem este tipo de redes um pouco diferentes das redes tradi-cionais de computadores, sejam esses de m ´etrica, de caracter´ıstica ou de finalidade. As redes de sensores sem fios t ˆem a capacidade de operar de forma aut ´onoma, sendo apenas necess ´ario a intervenc¸ ˜ao humana para tarefas de manutenc¸ ˜ao espec´ıficas. Possuem gran-des restric¸ ˜oes quanto ao processamento, mem ´oria e energia, t ˆem uma topologia din ˆamica e por isso devem prover mecanismos automatizados de modo a gerir a rede garantindo a sua configurac¸ ˜ao, manutenc¸ ˜ao, organizac¸ ˜ao e protec¸ ˜ao.
1.1. CONTEXTO 16
Torna-se importante um estudo aprofundado destas redes em v ´arias vertentes de forma a garantir a m ´axima robustez e fiabilidade em sistemas que utilizem este tipo de tecnologia.
´
E importante que se analise e configure de maneira adequada servic¸os que integrem uma rede de sensores sem fios, fornecendo a possibilidade de uma integrac¸ ˜ao r ´apida e direta em sistemas j ´a implementados.
Este projeto tem como objetivo o estudo da cobertura e conectividade das RSSF, de forma a garantir os requisitos pretendidos por v ´arios tipos de sistemas, pretendendo com isto, garantir um avanc¸o na inovac¸ ˜ao da ind ´ustria, automatizac¸ ˜ao e evoluc¸ ˜ao tecnol ´ogica.
1.1
Contexto
Actualmente, na fase de desenho e planeamento de uma RSSF, s ˜ao escolhidas ferramen-tas espec´ıficas com capacidade para simular uma rede, de modo a que se possa testar e configurar todo o sistema antes da sua implementac¸ ˜ao. Estas soluc¸ ˜oes normalmente n ˜ao t ˆem em considerac¸ ˜ao as condic¸ ˜oes do ambiente onde se pretende implementar a rede e todos os dados s ˜ao simulados, n ˜ao existindo uma comunicac¸ ˜ao direta com a pr ´opria rede, nem com os seus constituintes, de forma a se efetuar uma configurac¸ ˜ao din ˆamica e autom ´atica do sistema.
Existem v ´arios exemplos de implementac¸ ˜oes de simuladores de RSSF que t ˆem em conta as caracter´ısticas dos dispositivos normalmente presentes neste tipo de redes. As suas principais funcionalidades s ˜ao simulac¸ ˜oes e avaliac¸ ˜oes a n´ıvel protocolar, e recaem sobre como a rede gere e distribui os dados ao longo do seu tempo de vida. Esta pesquisa visa a integrac¸ ˜ao na arquitetura l ´ogica do sistema de componentes de software, que gerem os servic¸os deste tipo de redes, focando-se principalmente na camada f´ısica da rede, na forma como os dispositivos est ˜ao distribu´ıdos ao longo de determinada ´area e nas caracter´ısticas dos mesmos. Por este motivo, este projeto difere um pouco dos simuladores existentes, com objetivos e m ´etodos diferentes.
A implementac¸ ˜ao de uma rede de sensores pode ser efetuada de modo manual, onde os dispositivos s ˜ao instalados em posic¸ ˜oes previamente definidas ou de forma aleat ´oria sobre uma ´area de interesse. O problema da distribuic¸ ˜ao dos n ´os de uma rede, tem sido explorado por v ´arios investigadores, que apresentam soluc¸ ˜oes que t ˆem o objetivo de garantir a cobertura m ´axima de uma certa regi ˜ao a monitorizar[2]. Apresentamos ao longo do documento as formas de atuar de uma rede de sensores sem fios, bem como alguns algoritmos e m ´etodos estudados para resolver o problema da maximizac¸ ˜ao de cobertura
1.2. MOTIVAC¸ ˜AO E OBJETIVOS 17
de uma rede devido ao posicionamento dos seus dispositivos e `as caracter´ısticas dos mesmos.
Apesar disso, ainda n ˜ao existem servic¸os integrados na pr ´opria arquitetura da rede, que avaliem as caracter´ısticas da ´area e dos dispositivos dispon´ıveis com o objetivo de apre-sentar uma soluc¸ ˜ao ´otima para a distribuic¸ ˜ao de n ´os da rede, tendo em conta os requisitos pretendidos pela RSSF. Ou seja, a exist ˆencia de servic¸os com capacidade de disponibilizar, atrav ´es da rede, informac¸ ˜ao sobre a melhor topologia e disposic¸ ˜ao dos n ´os ao longo da
´area, de modo a maximizar n ˜ao s ´o a cobertura, mas tamb ´em a conectividade.
A facilidade de projetar e planear uma rede de forma autom ´atica e din ˆamica pode levar `a diminuic¸ ˜ao de custos e de tempo, requisitos de extrema relev ˆancia em todas as ´areas e setores, principalmente no que concerne `a Ind ´ustria. As caracter´ısticas do servic¸o que aqui ´e proposto fazem com que esta tecnologia se enquadre em projetos que t ˆem em vista a forte inovac¸ ˜ao da Ind ´ustria.
1.2
Motivac¸ ˜ao e Objetivos
O seguinte trabalho de pesquisa/investigac¸ ˜ao tem como objetivo, criar um servic¸o com capacidade de ser integrado diretamente na arquitetura de uma rede de sensores sem fios, de forma a efetuar avaliac¸ ˜oes em tempo real dos requisitos e dispositivos do sistema. O servic¸o engloba duas fases inerentes a uma rede de sensores sem fios; a fase de dese-nho e a fase de operac¸ ˜ao/manutenc¸ ˜ao, tem como foco acelerar e automatizar a construc¸ ˜ao e configurac¸ ˜ao de uma RSSF conseguindo minimizar os custos e o tempo despendido em todo o processo.
Na fase de planeamento e desenho deste tipo de redes, o servic¸o tem como objetivo resolver o problema da cobertura m ´axima de uma determinada ´area de forma autom ´atica, com recurso a algoritmos estudados que combatem este problema. Ou seja, possui a ca-pacidade de formular e sugerir o posicionamento dos dispositivos pela ´area a monitorizar, de modo a garantir os requisitos de qualidade e fiabilidade pretendidos pelo sistema.
O servic¸o proposto pretende responder ainda a quest ˜oes sobre os requisitos do sistema, como por exemplo; verificar se determinada ´area est ´a totalmente coberta pelos dispositivos que nela est ˜ao presentes; verificar se determinado par ˆametro (ex. medic¸ ˜ao de tempera-tura) est ´a a ser garantido com a precis ˜ao requerida ou se ´e poss´ıvel garantir determinado par ˆametro numa determinada ´area. Estes s ˜ao elementos que podem ser bastante ´uteis
1.2. MOTIVAC¸ ˜AO E OBJETIVOS 18
na fase de operac¸ ˜ao/manutenc¸ ˜ao do sistema e que pode fornecer informac¸ ˜oes ´uteis aos respons ´aveis por essa tarefa.
Espera-se alcanc¸ar a integrac¸ ˜ao do servic¸o no sistema com ajuda de tecnologias como o OSGi e o UPnP, que fornecem meios para uma comunicac¸ ˜ao livre e transparente entre todos os dispositivos. O servic¸o deve ent ˜ao ser capaz de responder adequadamente a pedidos recebidos por parte de outros agentes atrav ´es da rede. Seguem-se alguns exemplos do tipo de informac¸ ˜ao que o servic¸o pode fornecer:
• Sugest ˜ao de uma distribuic¸ ˜ao ´otima de dispositivos numa determinada ´area.
• Informac¸ ˜ao detalhada sobre todos os dispositivos presentes na rede.
• Verifica a disponibilidade e o estado de dispositivos.
• Informac¸ ˜oes sobre a QoS de uma rede, ou de parte da rede em particular.
• Verificar os servic¸os que est ˜ao dispon´ıveis.
• Verificar a qualidade dos servic¸os que a rede disp ˜oe.
Este projeto tem como objetivo simplificar o planeamento e implementac¸ ˜ao de uma rede de sensores sem fios, com soluc¸ ˜oes que tornam f ´acil e transparente a integrac¸ ˜ao e manutenc¸ ˜ao dos dispositivos, quer seja num sistema j ´a implementado ou numa ´area que se deseje mo-nitorizar. Este servic¸o pode ser considerado uma ferramenta ´util para diagnosticar, avaliar e configurar uma rede de sensores sem fios. Contudo, as informac¸ ˜oes que pode garantir, s ˜ao tamb ´em, bastante ´uteis para as ferramentas de diagn ´ostico das RSSF existentes.
Estas caracter´ısticas referidas acima fazem com que o servic¸o se enquadre em projetos europeus no ˆambito da automatizac¸ ˜ao de sensores, monitorizac¸ ˜ao de m ´aquinas industriais, inovac¸ ˜ao da ind ´ustria e equipamento inteligente, nomeadamente os projetos I-RAMP3 [3] e SelSus [4].
1.3. ESTRUTURA DA DISSERTAC¸ ˜AO 19
1.3
Estrutura da dissertac¸ ˜ao
Esta dissertac¸ ˜ao apresenta na sua estrutura os seguintes cap´ıtulos organizados da se-guinte forma:
Cap´ıtulo 1 Introduc¸ ˜ao: Cap´ıtulo que d ´a inicio a esta dissertac¸ ˜ao. Aborda o contexto do
projeto e exp ˜oe a motivac¸ ˜ao e o objetivo desta dissertac¸ ˜ao.
Cap´ıtulo 2 Problema: Referimos o problema que nos propomos a resolver e abordamos o
contexto industrial em que esta dissertac¸ ˜ao se enquadra, referenciando os projetos a ela associados.
Cap´ıtulo 3 Estado da Arte: Neste cap´ıtulo ´e explorado o tema das redes de sensores sem
fios de uma forma geral, expondo as suas caracter´ısticas e aplicabilidade. ´E abordado tamb ´em o tema da cobertura e conectividade de uma RSSF e os m ´etodos de distribuic¸ ˜ao de dispositivos numa ´area de interesse.
Cap´ıtulo 4 Desenho e Implementac¸ ˜ao: Ao longo deste cap´ıtulo explicamos o nosso projeto
com mais pormenor, evidenciando as tecnologias usadas, o algoritmo contru´ıdo e o seu m ´etodo de funcionamento assim como os resultados esperado.
Cap´ıtulo 5 Testes: Apresentados os testes efetuados e os resultados obtidos.
Cap´ıtulo 6 Conclus ˜oes e trabalho futuro: Cap´ıtulo final desta dissertac¸ ˜ao onde se discute
Cap´ıtulo 2
Problema
2.1
Contexto Industrial
Projetos europeus no ˆambito da automatizac¸ ˜ao das operac¸ ˜oes de manutenc¸ ˜ao e acelerac¸ ˜ao da fase de arranque operacional contextualizam os objetivos deste trabalho, tendo em conta o forte crescimento da ´area e a forte inovac¸ ˜ao da Industria com recurso a equi-pamento inteligente. Os projetos cofinanciados pela Comiss ˜ao Europeia no ˆambito do 7o Programa Quadro (FP7), tratam de uma mudanc¸a no paradigma dos sistemas de produc¸ ˜ao industrial ao n´ıvel do shop-floor, que representa a parte operacional da empresa/f ´abrica.
2.1.1 Reconfigurable Manufacturing System (RMS)
Um sistema de produc¸ ˜ao industrial tem identificadas algumas vari ´aveis que tem um im-pacto acrescido na sua efici ˆencia e funcionamento. Dois par ˆametros que t ˆem particular influ ˆencia num sistema deste tipo s ˜ao a demanda de um produto e a sua variedade. Um RMS ´e uma classe de sistema de manufatura que tem como objetivo alcanc¸ar um elevado n´ıvel de produtividade em c ´elulas de trabalho automatizadas na produc¸ ˜ao de produtos.Para se conseguir imunidade ao decr ´escimo de efici ˆencia do sistema, uma vez influenciado pelas vari ´aveis mencionadas, s ˜ao adotadas um conjunto de estrat ´egias que resultam num sistema de produc¸ ˜ao reconfigur ´avel [31].
Uma das vantagens de um RMS ´e a reduc¸ ˜ao do tempo de RAMP-UP, de modo a que seja reduzido o tempo de iniciac¸ ˜ao e conclus ˜ao de uma tarefa de produc¸ ˜ao. A variac¸ ˜ao do volume do produto dever ´a ter implicac¸ ˜oes m´ınimas na efici ˆencia da linha de produc¸ ˜ao. O sistema dever ´a evitar paragens imprevistas, causadas por falhas nas m ´aquinas. Dever ´a tamb ´em ser conseguida a sobreposic¸ ˜ao dos processos das tr ˆes fases de produc¸ ˜ao,
2.1. CONTEXTO INDUSTRIAL 21
nho, fabrico e montagem. O que se coaduna com os objetivos de manutenc¸ ˜ao inteligente e r ´apida delegac¸ ˜ao de processos de produc¸ ˜ao. Um RMS tem uma capacidade de reconfi-gurar os recursos de hardware e controlo em todos os n´ıveis funcionais e organizacionais, a fim de se ajustar rapidamente a capacidade de produc¸ ˜ao e funcionalidade em resposta a mudanc¸as bruscas de mercado ou em requisitos regulamentares.
2.1.2 I-RAMP3
Este projeto, que se entende por Inteligent Reconfigurable Machines for Smart Plug&Produce Production, explora a capacidade de virtualizac¸ ˜ao dos equipamentos presentes na ind ´ustria, tipicamente, PLC’s, PC’s, M ´aquinas Complexas, sensores e atuadores. No ˆambito do projeto, estes equipamentos necessitam de l ´ogica adicional para que as tarefas delegadas aos equipamentos possam ser desempenhadas com um grau adicional de intelig ˆencia. Estes dispositivos ser ˜ao ent ˜ao virtualmente encapsulados e representados por NETwork enabled DEVices, entidades virtuais que exploram a capacidade de comunicac¸ ˜ao transpa-rente conseguida pelo protocolo UPnP e as capacidades dos dispositivos encapsulados, sejam capacidades de monitorizac¸ ˜ao ou de atuac¸ ˜ao.
Tem como prop ´osito, colmatar os requisitos de produc¸ ˜ao que s ˜ao impostos `a ind ´ustria Europeia nos dias de hoje de forma inteligente. Visa facilitar a integrac¸ ˜ao de dispositivos em sistemas j ´a implementados, explorando o conceito de plug&produce, minimizar os custos e o tempo de arranque, operac¸ ˜ao e de manutenc¸ ˜ao das linhas de produc¸ ˜ao.
2.1.3 SelSus
O projeto, com o nome de Health Monitoring and Life-Long Capability Management for SELf- SUStaining Manufacturing Systems, tem como ambic¸ ˜ao criar um novo paradigma para obter m ´axima efici ˆencia, autorreparac¸ ˜ao e sustentabilidade do sistema e dos recursos de produc¸ ˜ao, com o objetivo de maximizar o seu desempenho ao longo de todo o tempo de vida do sistema. A ideia ´e ter uma nova gerac¸ ˜ao de m ´aquinas, equipamentos e ferra-mentas industriais que em conjunto com dispositivos integrados com capacidade sensorial e software avanc¸ado, permitam criar um sistema com capacidade de autodiagnostico e autorreparac¸ ˜ao que sirvam de suporte a todo o sistema de produc¸ ˜ao.
Este ´e um conceito diferente sobre a manufatura que incide numa autoan ´alise de toda a maquinaria. Criar um sistema de diagn ´ostico onde se pretende que as m ´aquinas te-nham uma forte componente de intervalidac¸ ˜ao, ou seja, que possam verificar de forma autom ´atica se tudo est ´a a decorrer como pretendido, permitindo a detenc¸ ˜ao de avarias
2.2. REQUISITOS 22
e no caso de ser poss´ıvel, permitir o ajuste autom ´atico de certos par ˆametros com vista a melhorar ou prevenir que a m ´aquina fique indispon´ıvel. O conceito de autoconheci-mento e aprendizagem, resultante de dados processados por redes bayesianas, permite a marcac¸ ˜ao autom ´atica de revis ˜oes `as m ´aquinas no shop-floor, a previs ˜ao de poss´ıveis falhas ou problemas e a an ´alise de efici ˆencia individual de cada m ´aquina ou a efici ˆencia total do sistema.
Tudo isto permite ent ˜ao obter um sistema inteligente e autossuficiente, economizador de recursos e que tira a efici ˆencia m ´axima dos equipamentos fazendo com que eles durem e produzam o m ´aximo. As informac¸ ˜oes resultantes do servic¸o proposto nesta dissertac¸ ˜ao, podem ser ´uteis para as ferramentas de diagn ´ostico utilizadas neste projeto.
2.2
Requisitos
A produc¸ ˜ao industrial ´e uma ´area onde a efici ˆencia ´e uma estrat ´egia chave, otimizac¸ ˜ao dos recursos utilizados, aceleramento das fases de desenho dos produtos finais, controlo de qualidade e problemas na linha de montagem. Para que um servic¸o de produc¸ ˜ao seja eficiente, existem v ´arias garantias que t ˆem que ser dadas, tais como:
• Informac¸ ˜ao detalhada sobre todos os dispositivos presentes na rede. • Garantir conetividade e comunicac¸ ˜ao entre dispositivos.
• Garantir que a rede de sensores implementada alcanc¸a uma cobertura m ´axima. • Dispositivos na rede com fiabilidade adequada ao servic¸o pretendido.
• Sugest ˜oes din ˆamicas de planeamento, orientac¸ ˜ao e configurac¸ ˜ao da rede.
O presente trabalho ir ´a incidir sobre estas mesmas garantias, requisitos estes que reque-rem uma integrac¸ ˜ao com os sistemas de gest ˜ao de servic¸os das RSSF permitindo uma abordagem mais eficiente e r ´apida ao seu processo. Ao explorar os servic¸os anunciados na rede de sensores, podem-se implementar estrat ´egias que resultem na soluc¸ ˜ao de problemas concretos no cen ´ario industrial.
O recurso `as ontologias utilizadas por estes sistemas, nomeadamente troca de descric¸ ˜oes de servic¸os e dispositivos em ficheiros de formato XML, permitir ´a obter os dados precisos sobre requisitos de servic¸os e caracter´ısticas espec´ıficas de cada dispositivo, que servir ˜ao de fonte a estrat ´egias de planeamento e gest ˜ao da rede. Este processo resulta num outro problema, visto que a integrac¸ ˜ao com os sistemas dever ´a garantir avaliac¸ ˜oes din ˆamicas,
2.2. REQUISITOS 23
fi ´aveis e em tempo real dos servic¸os e n ´os da rede de sensores. A compatibilidade entre atores tem de ser levada em considerac¸ ˜ao, visando facilitar a comunicac¸ ˜ao e interpretac¸ ˜ao de dados por todos os dispositivos associados ao sistema. ´E necess ´ario o suporte de tecnologias eficazes e com capacidade de fornecer mecanismos de comunicac¸ ˜ao entre diferentes tipos de hardware e servic¸os de forma a criar um sistema robusto e integr ´avel em diferentes plataformas.
O principal problema, que resulta no principal foco deste projeto, ´e garantir que a rede consegue monitorizar toda a ´area ou regi ˜ao, ou seja, garantir que a implementac¸ ˜ao da rede de sensores tem total cobertura sobre a ´area da sua instalac¸ ˜ao e que os dispositivos conseguem fornecer a fiabilidade e precis ˜ao adequada ao tipo de servic¸o e aplicac¸ ˜ao pretendida assim como fornecer um servic¸o integrado na arquitetura da rede de modo a estar dispon´ıvel a qualquer entidade que dele pretenda usufruir.
Cap´ıtulo 3
Estado da Arte
3.1
Redes de sensores sem fio (RSSF)
O avanc¸o tecnol ´ogico que se verifica nas ´areas que est ˜ao intrinsecamente ligadas `as redes de sensores sem fios, levaram a uma crescente adaptac¸ ˜ao e implementac¸ ˜ao de sistemas e aplicac¸ ˜oes com este tipo de rede. A evoluc¸ ˜ao natural de microprocessado-res, dispositivos sensores e/ou atuadomicroprocessado-res, MEMS (Micro Electro-Mecanical Systems) e da comunicac¸ ˜ao sem fios, garante que as redes de sensores sejam uma soluc¸ ˜ao bastante pr ´atica e completa para as mais variadas aplicac¸ ˜oes em que pretendemos determinar de forma autom ´atica informac¸ ˜ao sobre determinado fen ´omeno f´ısico.
Ao longo desta dissertac¸ ˜ao ser ´a adotado o termo de redes de sensores sem fios (RSSF) para designar a interligac¸ ˜ao de um determinado n ´umero de dispositivos com capacidade de observar o meio f´ısico, podendo ou n ˜ao conter dispositivos com capacidade de interagir com o ambiente, nomeadamente atuadores. Segundo os autores de [5], uma rede de sensores/atuadores pode ser definida como uma rede n ˜ao linear de conex ˜oes pesadas entre um pequeno ou grande n ´umero de sensores/atuadores. Note-se tamb ´em que a palavra sensor, ao longo deste documento, representar ´a em concreto dispositivos de ca-pacidade restrita que t ˆem a caca-pacidade de recolher dados do meio em que se encontram, process ´a-los ou n ˜ao e dissemin ´a-los atrav ´es de uma rede. Dispositivos estes, que podem ser tambem denominados de n ´os de uma rede de sensores sem fios.
As RSSF fornecem ent ˜ao a possibilidade de determinar o valor de um par ˆametro num local espec´ıfico ou detetar a ocorr ˆencia de eventos com interesse, estabelecer valores de par ˆametros de acordo com o tipo de evento ocorrido, classificar objetos detetados e rastrear um determinado objeto [6].
3.1. REDES DE SENSORES SEM FIO (RSSF) 25
Os requisitos de software e hardware de uma RSSF diferem mediante o tipo de sistema que se deseja implementar, o que torna o processo de configurac¸ ˜ao e planeamento, assim como o m ´etodo de funcionamento e a manutenc¸ ˜ao deste tipo de redes dependente do prop ´osito da implementac¸ ˜ao, do local da implementac¸ ˜ao e dos requisitos exigidos aos servic¸os da pr ´opria rede.
3.1.1 Areas e setores de aplicac¸ ˜ao´
A enorme capacidade que uma rede de sensores pode conferir em qualquer ´area e setor torna-se cada vez mais atrativo para diversas entidades, sendo j ´a um dos temas mais investigados pela comunidade educacional e investigadora. As RSSF s ˜ao vistas como a pec¸a que faltava no puzzle das redes informatizadas n ˜ao s ´o por fornecer a capacidade de monitorizar o meio, bem como permitem a interac¸ ˜ao com o mundo real, al ´em de que, este tipo de redes pode ser bastante modular, adaptando-se ao tipo de aplicac¸ ˜ao e objetivo final.
Os seus dispositivos, apesar de apresentarem capacidades bastante reduzidas ao n´ıvel do processamento, bateria e mem ´oria, s ˜ao bastante configur ´aveis. Um s ´o dispositivo pode conter v ´arios sensores que podem ser adaptados e escolhidos de acordo com o tipo de aplicac¸ ˜ao que se deseja, por exemplo para um sistema de controlo de gest ˜ao da iluminac¸ ˜ao de um edif´ıcio s ˜ao usados sensores de luminosidade enquanto sensores de imagem e ac ´usticos devem ser implementados nos dispositivos de um sistema de seguranc¸a. A construc¸ ˜ao de uma rede de sensores cablada, seja com par tranc¸ado, cabo coaxial ou de fibra ´otica, pode ser a melhor resposta para sistemas cr´ıticos quando a rapidez de processo e troca de informac¸ ˜ao ´e essencial. Contudo, esta abordagem facilmente se torna invi ´avel, n ˜ao por quest ˜oes de falta garantias de requisitos, mas porque pode fazer com que o custo de instalac¸ ˜ao e manutenc¸ ˜ao da rede suba para valores incomport ´aveis, como uma rede instalada numa floresta ou numa costa mar´ıtima.
As RSSF t ˆem-se demonstrado capazes de responder a problemas em diversas ´areas. Na ´area de controlo onde podem ser utilizadas para efetuar testes numa linha de montagem, na ´area do ambiente com a monitorizac¸ ˜ao de florestas, costas mar´ıtimas, vulc ˜oes ou simplesmente usadas para monitorizar e gerir edif´ıcios p ´ublicos ou privados. A ´area da seguranc¸a faz igualmente uso destas redes, como os sistemas de v´ıdeo vigil ˆancia em cen-tros comerciais ou parques de estacionamento que tamb ´em pode ser aplicada ao tr ´afego na monitorizac¸ ˜ao de ve´ıculos e gest ˜ao de tr ˆansito rodovi ´ario. Duas ´areas que tamb ´em t ˆem despertado grande interesse em servir-se desta tecnologia s ˜ao a medicina/biologia nas quais pode ser ´util a monitorizac¸ ˜ao de ´org ˜aos ou na detec¸ ˜ao de subst ˆancias perigosas, e a
3.1. REDES DE SENSORES SEM FIO (RSSF) 26
´area militar que aplica as RSSF em v ´arias vertentes como a monitorizac¸ ˜ao de militares no terreno, detec¸ ˜ao de minas ou materiais perigosos em determinadas regi ˜oes ou na gest ˜ao de armamento e ve´ıculos.
As v ´arias entidades de diferentes setores est ˜ao atentas `as capacidades que as RSSF possuem e comec¸am a surgir cada vez mais aplicac¸ ˜oes e sistemas que visam respon-der `as necessidades de cada setor, facilitando e/ou melhorando servic¸os e permitir a automatizac¸ ˜ao, monitorizac¸ ˜ao, gest ˜ao e controle de v ´arios par ˆametros.Pode identificar-se alguns identificar-setores onde identificar-se encontram j ´a implementados algumas soluc¸ ˜oes deste tipo como produc¸ ˜ao industrial, setor agriculta, distribuic¸ ˜ao de energia, g ´as e ´agua, extrac¸ ˜ao de petr ´oleo e g ´as, ind ´ustria de aviac¸ ˜ao [6]. Verifica-se ainda um vasto n ´umero de situac¸ ˜oes onde as redes de sensores sem fios podem ser empregues, visto apresentarem soluc¸ ˜oes capazes para um conjunto extraordinariamente diversificado de problemas; monitorizac¸ ˜ao em f ´abricas, edif´ıcios habitacionais, monumentos, florestas, desertos, oceano, ´areas de dif´ıcil acesso como vulc ˜oes atrav ´es de par ˆametros como press ˜ao, temperatura, luminosi-dade, n´ıvel, movimento.
Raz ˜oes mais do que suficientes para despertarem o interesse no setor da ind ´ustria, que visa elevar n ˜ao s ´o o n´ıvel de produc¸ ˜ao, bem como a organizac¸ ˜ao, gest ˜ao, garantia e fiabilidade, diminuindo tempo e custos.
3.1.2 Caracter´ısticas das RSSF
A avaliac¸ ˜ao de uma rede de sensores est ´a subjacente `a aplicac¸ ˜ao a que se destina, por conseguinte as suas caracter´ısticas est ˜ao dependentes do objetivo e servic¸os requeridos. O planeamento da rede, a sua arquitetura, as func¸ ˜oes e capacidades f´ısicas e l ´ogicas de cada dispositivo, a disposic¸ ˜ao de cada n ´o da rede pela ´area a monitorizar e a pilha protocolar a utilizar, dever ˜ao ter em conta o local de implementac¸ ˜ao da RSSF, os seus componentes e o objetivo final da aplicac¸ ˜ao pretendida. De acordo com ou autores de [1] uma rede de sensores pode classificar-se segundo quatro par ˆametros; configurac¸ ˜ao, capacidade de monitorizac¸ ˜ao, tipo de comunicac¸ ˜ao utilizado e tipo de processamento efetuado.
3.1.2.1 Configurac¸ ˜ao
Os n ´os que representam cada componente da rede n ˜ao t ˆem de ser necessariamente iguais nas suas capacidades f´ısicas e l ´ogicas. Uma RSSF define-se como homog ´enea quando constitu´ıda por n ´os com os mesmos requisitos em termos de hardware e heterog ´enea caso contr ´ario. O n´ıvel organizacional dos dispositivos presentes na rede pode ser efetuado de
3.1. REDES DE SENSORES SEM FIO (RSSF) 27
forma hier ´arquica, onde os n ´os se agrupam conforme determinados par ˆametros, ou de forma plana caso n ˜ao exista nenhum grupo de dispositivos formado.Por sua vez, os grupos podem ter hierarquias entre si e conter um n ´o respons ´avel por ser o l´ıder, conhecido como cluster-head, desse conjunto de dispositivos.
Devido a exist ˆencia de dispositivos com capacidades m ´oveis, podemos separar este tipo de redes em dois tipos: a m ´ovel e a estacion ´aria. Numa RSSF m ´ovel, ao longo do tempo de vida da rede, os dispositivos podem alterar as suas posic¸ ˜oes iniciais para cumprir certos requisitos estipulados sendo que, numa rede estacion ´aria nenhum dos dispositivos altera a sua posic¸ ˜ao f´ısica desde a sua instalac¸ ˜ao.
A distribuic¸ ˜ao dos n ´os pela ´area de aplicac¸ ˜ao pode ser ou n ˜ao uniforme e a densidade da rede ´e atribu´ıda mediante o n ´umero de n ´os distribu´ıdos por unidade de ´area. Em [1], o autor afirma que a rede ´e equilibrada quando existe uma distribuic¸ ˜ao ideal segundo o objetivo da rede, densa ou esparsa quando a concentrac¸ ˜ao de n ´os por unidade de ´area ´e alta ou baixa respetivamente.
3.1.2.2 Monitorizac¸ ˜ao
Os dispositivos sensores podem ser configurados de maneira diferente quanto `a recolha de dados do meio ou fen ´omeno. A obtenc¸ ˜ao de dados pode ser efetuada de forma peri ´odica ou cont´ınua, em tempo real ou por reac¸ ˜ao a um impulso. Mais uma vez a escolha de cada um destes m ´etodos recai sobre os requisitos da pr ´opria aplicac¸ ˜ao. Uma aplicac¸ ˜ao com o objetivo de recolher informac¸ ˜oes de temperatura numa floresta poder ´a dividir tem-poralmente o per´ıodo de ativac¸ ˜ao e recolha de dados de cada dispositivo de maneira a economizar energia e consequentemente prolongar o tempo de vida da rede. Num sistema de vigil ˆancia a captac¸ ˜ao de dados ´e realizada de forma cont´ınua ou configurada para reagir apenas se algum movimento for detetado. A comunicac¸ ˜ao em tempo real geralmente ´e escolhida em ´areas com sistemas cr´ıticos, que envolvem riscos ou importantes tomadas de decis ˜ao como ´e o caso da medicina e ´area militar.
3.1.2.3 Comunicac¸ ˜ao
Neste t ´opico ´e abordada a forma como a informac¸ ˜ao ´e distribu´ıda numa RSSF. Para uma mais f ´acil percec¸ ˜ao apresentamos a tabela 3.1 que classifica este tipo de redes mediante a comunicac¸ ˜ao e ligac¸ ˜oes efetuadas.
3.1. REDES DE SENSORES SEM FIO (RSSF) 28
Tabela 3.1: Fluxo de informac¸ ˜ao. Comunicac¸ ˜ao em redes de sensores sem fios. [1]
Envio de dados
Programada N ´os da rede enviam os dados em intervalos regulares
Cont´ınua N ´os da rede enviam os dados de forma cont´ınua.
Reativo N ´os apenas enviam dados mediante consultas ou por reac¸ ˜ao a um qualquer evento.
Tipo de Conex ˜ao
Sim ´etrica Todas as ligac¸ ˜oes entre os n ´os da rede t ˆem o mesmo alcance, eventualmente poder ´a ser diferente no n ´o central.
Assim ´etrica Todas as ligac¸ ˜oes entre os n ´os da rede t ˆem um alcance diferente.
Transmiss ˜ao
Simplex N ´os apenas possuem a capacidade de trans-mitir dados
Half-Duplex N ´os possuem a capacidade de transmitir e receber dados, contudo apenas o consegue fazer em exclusividade, ou seja, se transmite n ˜ao recebe e vice-versa.
Full-Duplex Os n ´os t ˆem capacidades para transmitir e rece-ber dados em simult ˆaneo.
Alocac¸ ˜ao de Canal
Est ´atica A largura de banda pode ser dividida por frequ ˆencia, por tempo, por c ´odigo ou ortogo-nalmente. (FDMA,TDMA,CDMA,OFDM) Din ˆamica N ˜ao existe nenhum crit ´erio de atribuic¸ ˜ao de
banda e por isso os n ´os disputam pela utilizac¸ ˜ao do canal.
Fluxo de informac¸ ˜ao
Flooding N ´os comunicam com os seus vizinhos atrav ´es de broadcast at ´e que os dados cheguem ao destino. Existe muitas mensagens a cir- cular na rede o que pode provocar problemas na fiabilidade da mesma.
Multicast A rede est ´a organizada hierarquicamente e ´e utilizado multicast para a comunicac¸ ˜ao entre os n ´os pertencentes a cada grupo.
Unicast N ´os tomam partido de protocolos de rotea-mento multi-salto para comunicar diretamente com o n ´o pretendido.
Gossiping Os n ´os escolhem os destinat ´arios a que que-rem enviar informac¸ ˜ao
Bargaining Apenas ´e transmitida informac¸ ˜ao por parte de um n ´o se receber uma manifestac¸ ˜ao por parte de outro n ´o. Em geral, os n ´os solicitam a transmiss ˜ao de dados.
3.1. REDES DE SENSORES SEM FIO (RSSF) 29
3.1.2.4 Processamento
O processamento dos dados numa RSSF est ´a tamb ´em dependente do tipo de aplicac¸ ˜ao pretendida, e ocorre de v ´arias formas conforme os requisitos pretendidos pelo sistema. Os n ´os, que representam cada dispositivo presente na rede, realizam procedimentos relativos `a infraestrutura como a eleic¸ ˜ao de l´ıderes em redes hier ´arquicas, procura e descoberta de n ´os ou criptografia de dados. O processamento pode ainda ser realizado de forma localizada, quando os n ´os executam um pequeno processamento local antes de enviar informac¸ ˜oes atrav ´es da rede, como por exemplo a traduc¸ ˜ao dos dados que recolhem, ou de forma correlacionada onde os dispositivos utilizam t ´ecnicas de fus ˜ao e agregac¸ ˜ao de dados, contagem e compress ˜ao `a medida que s ˜ao trocadas as informac¸ ˜oes pela rede.
3.1.2.5 Energia
Uma das caracter´ısticas das RSSF mais importante para garantia de QoS do sistema ´e a sua energia. O facto de estas redes permitirem a sua instalac¸ ˜ao em locais remotos e por vezes de dif´ıcil acesso, dificulta a sua manutenc¸ ˜ao f´ısica, e torna important´ıssima a quest ˜ao da energia. O tempo de vida de uma rede ´e definido pela quantidade de energia de cada um dos seus dispositivos que s ˜ao alimentados geralmente por baterias.
Torna-se ent ˜ao importante, gerir da melhor forma a quantidade de energia gasta por cada componente de uma RSSF, assim como garantir que a rede seja capaz de responder a falhas cr´ıticas de energia que podem ter consequ ˆencia direta na falha de transmiss ˜ao e recec¸ ˜ao de dados. Como exemplo pr ´atico, um dispositivo sensor pode ficar desativado por longos per´ıodos de tempo e apenas transmitir quando lhe ´e efetuado um pedido por parte de outra entidade, poupando desta forma energia. Se os dispositivos forem s ˜ao capazes de trocar atrav ´es da rede, informac¸ ˜ao sobre a quantidade de energia que pos-suem e desta forma fornecer um meio utilizado por certos protocolos de roteamento na gest ˜ao e construc¸ ˜ao de caminhos fi ´aveis entre os n ´os da RSSF. Com esta informac¸ ˜ao torna-se poss´ıvel elaborar um mapa de energia da rede, ou seja, ´e poss´ıvel representar graficamente a informac¸ ˜ao em tempo real de toda a energia presente na rede e desta forma prevenir falhas do sistema ou adaptar a rede da melhor maneira em func¸ ˜ao de maximizar o seu tempo de vida.
Os sensores representam os elementos do dispositivo que s ˜ao respons ´aveis por escutar e sentir o meio ambiente e o seu consumo de energia est ´a dependente da forma como se encontram a operar e do tipo de grandeza que est ˜ao a recolher.
3.1. REDES DE SENSORES SEM FIO (RSSF) 30
3.1.3 Componentes, padr ˜oes e tecnologias
3.1.3.1 Dispositivos
As motes s ˜ao os principais respons ´aveis por captar e recolher informac¸ ˜oes do mundo real, sendo a unidade central deste tipo de redes contudo, podem ter tamb ´em a capacidade de processamento e envio de dados para outros dispositivos [7]. Normalmente estes dispositivos s ˜ao de dimens ˜oes reduzidas e apresentam s ´erias limitac¸ ˜oes no que concerne ao processamento, mem ´oria e bateria. Apesar de apresentarem a vantagem de terem um custo e tamanho reduzido, facilitando assim sua implementac¸ ˜ao e distribuic¸ ˜ao pelas mais diversas regi ˜oes, ´e essencial que se estude os melhores m ´etodos para lidar com as suas restric¸ ˜oes seja pelo fraco processamento ou pela quantidade de bateria que possuem. O facto desta proposta se enquadrar nos projetos acima referidos, I-RAMP3 e Selsus, faz com que sejam considerados os dispositivos que deles fazem parte, fala-se de sensores de toque, humidade, press ˜ao, temperatura, indutivos, ac ´usticos e ´oticos.
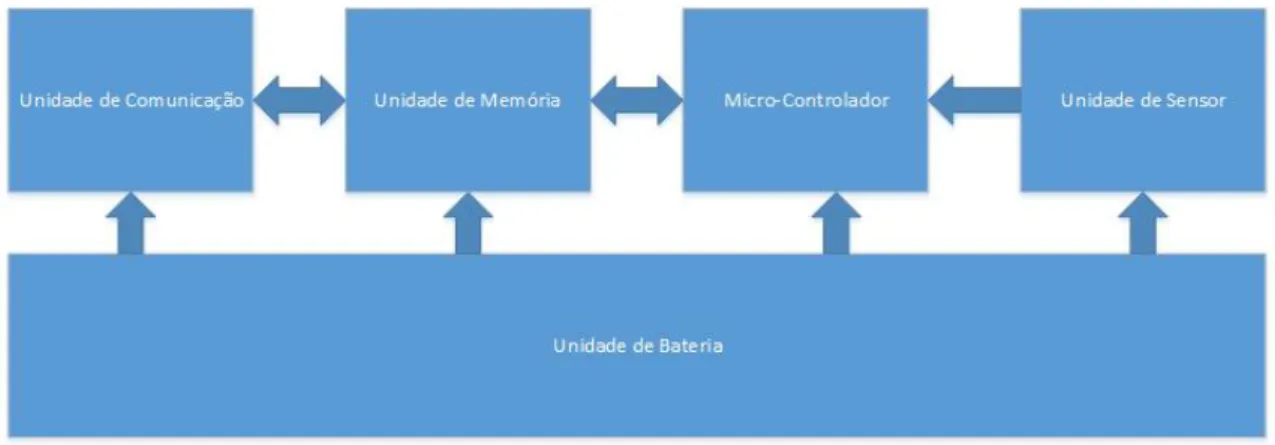
Tipicamente a arquitetura da mote divide-se em cinco unidades: a unidade de microcon-trolador, a unidade mem ´oria, a unidade de Sensor, a unidade de comunicac¸ ˜ao e a unidade de Bateria [7].
Figura 3.1: Componentes do dispositivo
O microcontrolador ´e o n ´ucleo do dispositivo e est ´a diretamente ligada `a sua capacidade de decis ˜ao. ´E projetado para consumir a menor energia poss´ıvel devido `as limitac¸ ˜oes que estes dispositivos apresentam. A funcionalidade desta unidade baseia-se no processa-mento dos dados recolhidos pelo sensor, decidindo e controlando para onde e quando s ˜ao enviados esses dados, gerindo inclusive toda a informac¸ ˜ao que poder ´a receber de outros n ´os. O microcontrolador tem a capacidade de gerir a sua energia quando a sua utilizac¸ ˜ao
3.1. REDES DE SENSORES SEM FIO (RSSF) 31
´e nula ou escassa, controlando o seu per´ıodo de atividade durante o tempo de vida do sistema. A unidade de mem ´oria pode ser dividida em duas partes distintas.
A RAM (random access memory ), que d ´a suporte `a unidade de microcontrolador e a ROM (read-only memory ), usada para guardar os programas do dispositivo e os dados recolhidos pela unidade de sensor. Note-se que a velocidade de acesso e escrita na RAM ´e superior `a da ROM, contudo, se existir alguma falha de energia no dispositivo, este pode perder todos os dados recolhidos e/ou analisados. Ler e escrever dados na mem ´oria tem como consequ ˆencia um gasto de tempo e de mem ´oria que est ´a dependente dos requisitos de cada aplicac¸ ˜ao.
A unidade de sensor cont ´em todos os componentes que interagem e captam informac¸ ˜ao do mundo f´ısico segundo v ´arios par ˆametros, sejam eles temperatura, humidade, luminosidade ou press ˜ao. Possu´ı uma unidade de convers ˜ao (ADC – Analogue-to-Digital Converter ) com a func¸ ˜ao de converter os sinais anal ´ogicos, que s ˜ao produzidos pelos sensores, para sinais digitais que s ˜ao utilizados e processados pela unidade de microcontrolador. Os sensores podem ser desativados e ativados mediante a necessidade de uso ou simplesmente serem definidos para estar num estado de alerta diminuindo a sua atividade at ´e ser estimulado por algum evento externo.
A unidade de Comunicac¸ ˜ao, como o pr ´oprio nome indica, cont ´em todos os componentes necess ´arios para que os dispositivos de uma rede comuniquem entre si. Numa rede cablada existe a necessidade de cada dispositivo estar conectado por um meio f´ısico o que limita a flexibilidade e escalabilidade de uma rede de sensores e pode elevar o custo de implementac¸ ˜ao para valores insuport ´aveis.
Geralmente em algumas RSSF os dispositivos s ˜ao equipados com um transcetor, que inclui um transmissor, recetor, antena, amplificadores de pot ˆencia e outro tipo de com-ponentes de modo a garantir a comunicac¸ ˜ao com os outros dispositivos integrados na rede. Normalmente o transcetor pode funcionar mediante quatro estados, ´e controlado pelo microcontrolador e pode adaptar a sua utilizac¸ ˜ao de modo a controlar os gastos de energia e como consequ ˆencia, maximizar o tempo de vida da rede. Dois estados ´obvios desta unidade s ˜ao a transmiss ˜ao e recec¸ ˜ao. A transmiss ˜ao acontece quando o dispositivo apenas est ´a a transmitir dados pela rede, neste caso o transmissor encontra-se ent ˜ao ligado e a antena irradia energia, a recec¸ ˜ao ocorre quando o dispositivo est ´a a receber dados e simultaneamente o transcetor apenas coloca ativo o recetor, note-se que a quantidade de energia despendida ´e maior no estado de transmiss ˜ao do que recec¸ ˜ao de informac¸ ˜ao. De modo a lidar com a quest ˜ao da gest ˜ao de energia, o transcetor pode
3.1. REDES DE SENSORES SEM FIO (RSSF) 32
operar em dois modos, parado (idle) e dormir (sleep). No primeiro caso, o dispositivo n ˜ao est ´a a receber informac¸ ˜ao mas encontra-se `a escuta e pronto a reagir se algum evento lhe ´e associado. O segundo caso ´e o que tem menor coeficiente de gasto energ ´etico pois todos os componentes do transcetor encontram-se desligados.
A unidade de bateria de um dispositivo sensor, como j ´a foi mencionado ao longo deste trabalho, ´e um dos pontos cr´ıticos no que diz respeito a redes de sensores sem fios. A pr ´opria rede ´e projetada e definida em func¸ ˜ao da maximizac¸ ˜ao do seu tempo de vida e por sinal da conservac¸ ˜ao de energia. Geralmente, esta unidade ´e constitu´ıda por baterias n ˜ao recarreg ´aveis e com energia finita, n ˜ao obstante que poder ´a ser incorporado no dispositivo um sistema de recarga, como por exemplo pain ´eis de captac¸ ˜ao de luz solar.
3.1.3.2 Padr ˜oes
V ´arios protocolos foram propostos para redes sem fios para automac¸ ˜ao industrial tais como: Bluetooth, Wi-Fi, ZigBee, WirelessHART e ISA SP100.11a.
O Bluetooth atua na banda industrial, cient´ıfica e m ´edica (ISM) entre 2,4 a 2,458 GHz, usando spread spectrum atrav ´es de um sinal full-duplex. A modulac¸ ˜ao utilizada ´e OFDM e utiliza adaptive frequency hopping (AFH) de modo a lidar com certas interfer ˆencias presentes no meio, tendo liberdade de escolher frequ ˆencias diferentes das utilizadas por outros dispositivos. Dependendo da pot ˆencia, os dispositivos s ˜ao classificados em tr ˆes classes, com alcance de um metro para a classe 3, dez e cem metros para as classes 2 e 3 respetivamente. A taxa de transmiss ˜ao varia consoante a vers ˜ao utilizada, situando-se entre 1 Mbp/s para a vers ˜ao 1.2, 3 Mbp/s e 24 Mbps na vers ˜ao 2.0 e 3.0 respetivamente.
A tecnologia Wi-Fi, baseada no padr ˜ao IEEE 802.11 atua na faixa de frequ ˆencia de 2,4 GHz ou 5 GHz e consegue um alcance de trinta a trezentos metros. Para lidar com problemas de interfer ˆencias e ru´ıdos presentes no meio, faz recurso de t ´ecnicas de transmiss ˜ao como DSSS e OFDM, bem como CSMA/CA para detec¸ ˜ao de colis ˜oes.
O ZigBee tem como mais-valia o seu baixo consumo de energia, o que eleva autonomia da bateria de cada dispositivo e consequentemente o tempo de vida da rede. Segue as especificac¸ ˜oes da norma IEEE 802.15.4 e pode operar em diferentes faixas de trans-miss ˜ao, 2,4 GHz, 915 MHz e 868 MHz. Possui m ´etodos criptogr ´aficos (AES-128) para seguranc¸a de dados e as taxas de transfer ˆencia variam entre 20 kbps a 250 kbps. Para lidar com as interfer ˆencias e o ru´ıdo que possa existir no meio, o padr ˜ao disponibiliza v ´arias
3.1. REDES DE SENSORES SEM FIO (RSSF) 33
t ´ecnicas de transmiss ˜ao DSSS.
O primeiro padr ˜ao de comunicac¸ ˜ao sem fios a ser desenvolvido para a ind ´ustria de pro-cesso foi o WirelessHART, sendo compat´ıvel com o padr ˜ao IEEE 802.15.4. Tal como o ZigBee, este padr ˜ao ´e caracterizado pelo baixo consumo de energia, operando na faixa de transmiss ˜ao 2,4 GHz com uma taxa de 250 kbps. Uma particularidade da sua arquitetura ´e o fato de cada dispositivo funcionar como um router ou repetidor de sinal, sendo a comunicac¸ ˜ao entre cada n ´o realizada sobre TDMA (Time Division Multiple Acess).
A International Society of Automation (ISA) desenvolveu um padr ˜ao de comunicac¸ ˜ao para redes sem fios industriais, denominado ISA SP100.11. As suas func¸ ˜oes e caracter´ısticas s ˜ao semelhantes ao protocolo WirelessHART, com a particularidade de fornecer a capa-cidade de integrac¸ ˜ao com os protocolos existentes, como por exemplo, HART, Profibus, DeviceNet, Fieldbus, entre outros.
3.1.3.3 Sistemas Operativos
As RSSF s ˜ao definidas geralmente como um sistema reativo e por vezes associadas a aplicac¸ ˜oes e sistemas cr´ıticos. Estas redes podem conter um n ´umero elevado de disposi-tivos sensores com s ´erias limitac¸ ˜oes de mem ´oria, processamento e energia, conectados entre si com o objetivo de detetar e transmitir fen ´omenos do meio f´ısico. Os sistemas operativos devem ter em considerac¸ ˜ao todas as restric¸ ˜oes f´ısicas e l ´ogicas dos dispositivos sensores que um sistema operacional comum seria incapaz de suportar. Surge ent ˜ao a necessidade de estruturar sistemas operativos capazes de gerir os recursos de hardware de forma eficaz, que suportem operac¸ ˜oes simult ˆaneas e intensivas, consiga modularidade e robustez e uma boa gest ˜ao de energia [8].
Alguns sistemas operativos v ˆem sendo propostos para as RSSF como o MANTIS OS, o YATOS, o Contiki, entre outros. S ˜ao sistemas que se apresentam leves, compactos, modulares e preparados para lidar com v ´arios tipos de restric¸ ˜oes presentes em RSSF quer sejam de caracter f´ısico como l ´ogico. Um dos sistemas mais famosos quer pela comunidade estudantil, investigadora e empresarial ´e sem d ´uvida o TinyOS [9].
O sistema operacional TinyOS ´e um sistema open-source especificamente desenhado para dispositivos wireless de baixa computac¸ ˜ao, computac¸ ˜ao ub´ıqua, PANs e edif´ıcios inteligentes. E um sistema idealizado e constru´ıdo de forma a lidar com as restric¸ ˜oes´ dos dispositivos tipicamente presentes nas RSSF, que geralmente apenas possuem micro-controladores com poucos kB de RAM e pouco espac¸o para programas. Comec¸ou a ser
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 34
desenvolvido na universidade de Berkeley no ano de dois mil por Jason Hill na sua tese de mestrado, onde apresenta um sistema baseado em eventos, simples, pequeno, e com um conjunto de ferramentas dispon´ıveis que suportam o desenvolvimento de c ´odigo espec´ıfico para cada aplicac¸ ˜ao. A nova vers ˜ao do sistema suporta um vasto conjunto de dispositivos com diferente processador, radio e mem ´oria, nomeadamente a fam´ılia telos, micaZ, IRIS, mica2, epic, mulle, tinynode, span e iMote2.
3.2
Cobertura e conectividade de uma RSSF
A cobertura de uma ´area e a conectividade dos n ´os podem ser classificadas como medidas de qualidade de servic¸os numa RSSF. Pretendem responder a quest ˜oes simples e essen-ciais numa rede deste tipo, como o qu ˜ao bem uma certa ´area de interesse est ´a coberta pelos dispositivos e o qu ˜ao precisos podem ser estes na captura de informac¸ ˜ao. Depois de distribu´ıdos, os n ´os sensores formam uma rede que pode mudar dinamicamente ao longo do tempo conforme a mobilidade dos seus n ´os, a energia global da rede, os obst ´aculos presentes no meio ou o ru´ıdo a que est ´a exposta, entre outros [10].
Basicamente o problema da cobertura especifica o n ´umero de n ´os m´ınimos que se tem de implantar numa determinada ´area para que esta fique otimamente coberta, ou seja, todos os pontos de interesse presentes no ambiente a monitorizar est ˜ao dentro da ´area de monitorizac¸ ˜ao de pelo menos um sensor.
O melhor ambiente para a instalac¸ ˜ao de uma RSSF seria um, onde n ˜ao existisse inter-fer ˆencias nas comunicac¸ ˜oes, o terreno fosse plano e n ˜ao existisse vegetac¸ ˜ao. Em tal cen ´ario, os dispositivos sensores que constituem a rede estariam dispostos em forma de grelha, distanciados mediante o alcance do seu r ´adio, ou seja, a dist ˆancia que separa cada elemento da rede ´e proporcional ao alcance do r ´adio de cada dispositivo [11].
Em [10] encontramos definidos tr ˆes tipos de cobertura caracterizadas pela forma como est ˜ao dispostos os n ´os presentes na rede. Na primeira os n ´os s ˜ao est ´aticos e dispostos de forma a maximizar o r ´acio de detenc¸ ˜ao dos pontos a analisar, foca-se essencialmente em garantir que toda a ´area seja coberta por pelo menos um sensor. A cobertura em forma de barreira caracteriza-se pela disposic¸ ˜ao de dispositivos em linha, onde a disposic¸ ˜ao est ´atica de n ´os pretende minimizar a probabilidade de algo intruso trespassar a barreira criada pelos sensores. Como exemplo deste tipo de cobertura temos os alarmes de seguranc¸a ou uma rede de sensores a monitorar o local de pasto do gado criando barreiras virtuais para controlar os animais [12]. Algumas estrat ´egias consideram ainda o recurso a dispositivos
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 35
m ´oveis presentes na ´area de monitorizac¸ ˜ao de maneira a se atingir um equil´ıbrio, entre a maximizac¸ ˜ao do r ´acio das detenc¸ ˜oes de eventos de cada n ´o e a minimizac¸ ˜ao de dados perdidos por unidade de ´area. Por exemplo, uma rede de sensores implementada numa enorme ´area florestal, por onde passam periodicamente determinados dispositivos m ´oveis com a func¸ ˜ao de recolher as informac¸ ˜oes dos sensores.
Todos os modelos de cobertura e conectividade est ˜ao dependentes do objetivo da aplicac¸ ˜ao, da pr ´opria rede e dos algoritmos e protocolos utilizados. Os mesmos autores apresentam tr ˆes tipos diferentes de estrat ´egias para se determinar uma cobertura ´otima. Estrat ´egias que fazem recurso de ferramentas de geometria computacional tais como o diagrama de Voronoi e a triangulac¸ ˜ao de Delaunay, sendo estas estrat ´egias direcionadas a aplicac¸ ˜oes que tentam detetar algo n ˜ao autorizado e presente na rede. Estrat ´egias que utilizam algo-ritmos que exploram a mobilidade dos n ´os com o objetivo de obter uma melhor cobertura, estes algoritmos assumem movimentac¸ ˜oes efetuadas pelos dispositivos depois de estarem nas suas posic¸ ˜oes iniciais para que se atinja a m ´axima cobertura de rede de forma a maximizar a cobertura da rede. Definem ainda, o recurso a algoritmos que lidam com os problemas de cobertura e de conetividade atrav ´es de um framework integrado. Estas estrat ´egias, normalmente focam-se mais a n´ıvel protocolar, tratam do controlo de topologia e escalonamento da atividade de cada n ´o, isto ´e, cada n ´o tem um modo que lhe permite ligar-se e desligar-se automaticamente segundo determinados crit ´erios, com o intuito de minimizar o consumo de energia ou ent ˜ao tratam do desdobramento da estrutura da rede.
A cobertura de uma rede ´e ent ˜ao definida atrav ´es da dist ˆancia entre um determinado ponto no espac¸o de monitorizac¸ ˜ao e a localizac¸ ˜ao do dispositivo sensor, que fazem recurso de func¸ ˜oes que podem ser definidas de diferentes formas dependendo da interpretac¸ ˜ao, do tipo de sensores e do tipo de aplicac¸ ˜ao. Tem como objetivo responder `a quest ˜ao do qu ˜ao bem um sensor consegue captar um fen ´omeno f´ısico numa determinada localizac¸ ˜ao [7].
3.2.1 Modelos de Cobertura
Os modelos de cobertura consideram medidas de qualidade e capacidade, no que con-cerne a cada sensor individualmente. Atrav ´es das coordenadas cartesianas do sensor e de um ponto a monitorizar, podemos calcular a dist ˆancia que os separa atrav ´es da func¸ ˜ao (3.1)[7]:
d(s, p) = q
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 36
Considerando o plano bidimensional, sendo p um ponto no espac¸o a monitorizar e S um conjunto de dispositivos sensores {s1, s2, ..., sn} e (sx, sy)(px, py)as coordenadas cartesia-nas do sensor e do ponto respetivamente, a func¸ ˜ao d(s,p) define a dist ˆancia euclidiana en-tre o sensor s e o ponto p, conclu´ımos ent ˜ao que o vetor dn = [d(s1, p), d(s2, p), ..., d(sn, p)] representa o conjunto das dist ˆancias entre n sensores e um determinado ponto p.
Em [7] encontramos alguns modelos definidos que t ˆem em conta as caracter´ısticas f´ısicas dos dispositivos. O modelo de cobertura de setor ´e um modelo booleano utilizado quando o sensor tem uma determinada orientac¸ ˜ao e campo “visual”, como por exemplo uma c ˆamara direcionada. A func¸ ˜ao deste modelo pode tomar os valores de um quando os pontos estejam situados dentro da ´area monitorizada pelo sensor ou zero caso contr ´ario. Assumindo θs como o ˆangulo que representa a orientac¸ ˜ao do sensor, w seu ˆangulo visual e Rso alcance seu raio de monitorizac¸ ˜ao, a func¸ ˜ao de cobertura deste modelo ´e dada por:
f (d(s, p), θ(s, p)) = (
1, d(s, p) ≤ Rs e θs ≤ θ(s, p) ≤ θs + w
0, caso contr´ario
)
(3.2)
Podemos ent ˜ao assumir, que a cobertura m ´edia do ponto monitorizado por v ´arios sensores ´e a soma do valor da cobertura de cada sensor que o est ´a a cobrir, ou seja:
f (dn, Θn) = i=1 X
n
f i(d(si, p), Θ(si, p)) (3.3)
Esta func¸ ˜ao tem como resultado o n ´umero de sensores que est ˜ao a monitorizar o ponto p.
Outro modelo booleano muito utilizado na literatura e talvez o mais famoso ´e o modelo de cobertura em disco. Este modelo caracteriza-se por definir que um sensor est ´a apto a captar todos os pontos de interesse que est ˜ao contidos numa circunfer ˆencia que tem como centro o pr ´oprio dispositivo e raio o alcance do seu sensor. Contudo, ele n ˜ao leva em considerac¸ ˜ao que o processo de monitorizar determinada ´area pode ser influenciado, n ˜ao s ´o pelas caracter´ısticas f´ısicas do dispositivo como por exemplo pela m ´a calibrac¸ ˜ao do hardware ou por fatores como condic¸ ˜oes ambientais, obst ´aculos presentes no meio ou ru´ıdo existente.
Sup ˜oe-se ent ˜ao que toda a ´area abrangida por esta circunfer ˆencia est ´a a ser monitorizada pelo dispositivo e por isso, se a dist ˆancia do dispositivo a um ponto qualquer na ´area for menor que Rs ent ˜ao a func¸ ˜ao (3.4) retorna um, caso contr ´ario retorna zero.
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 37
f (d(s, p)) = (
1, d(s, p) ≤ Rs 0, caso contr´ario
)
(3.4)
Desta forma ´e poss´ıvel determinar o n ´umero de sensores que est ˜ao a cobrir um determi-nado ponto no espac¸o pela soma das func¸ ˜oes de cobertura de cada n ´o individual(3.5), ou seja, se f (dn) = k, o ponto ´e coberto por k sensores.
f (dn) = n X
i=1
f i(d(si, p)) (3.5)
Tipicamente, a qualidade dos dados recolhidos pelo dispositivo diminui com o aumento da dist ˆancia entre este e o ponto a monitorizar no espac¸o. De forma a obtermos valores mais precisos, existem modelos que lidam com o problema da reduc¸ ˜ao da qualidade do valor recolhido pelo sensor. A medida de cobertura de um dispositivo em relac¸ ˜ao a um ponto p presente na ´area pode ser definida atrav ´es da func¸ ˜ao (3.6) onde ‘a’ representa o expoente de atenuac¸ ˜ao do caminho e C uma constante definida.
f (d(s, z)) = C
da(s, z) (3.6)
Mediante esta situac¸ ˜ao podemos afirmar que dados dois pontos no espac¸o, o ponto situado mais pr ´oximo do sensor tem melhor m ´edia de cobertura e ter ´a uma monitorizac¸ ˜ao mais precisa. Desta forma, determinamos o conjunto de sensores que est ´a a monitorizar um ponto de interesse na ´area atrav ´es da soma dos valores de medida de cobertura de cada sensor individualmente, ou seja:
f (dn) = n X i=1 C da(s, z) (3.7)
Para lidar com o problema da perda de qualidade dos dados recolhidos quando aumenta a dist ˆancia entre o dispositivo e o ponto a observar podem ser realizadas algumas aproximac¸ ˜oes truncando a m ´edia de cobertura para elevados valores de dist ˆancia. Os autores de [13] idealizam uma func¸ ˜ao (3.8) que tem em considerac¸ ˜ao certas caracter´ısticas f´ısicas dos sensores (α), como a sua precis ˜ao ou calibrac¸ ˜ao de hardware, de modo a estimar a variac¸ ˜ao do seu alcance.
f (d(s, p)) = (
Ce−(αd(s,p)), d(s, p) ≤ Rs 0, caso contr´ario
)
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 38
Os mesmos autores em [14] definem uma nova func¸ ˜ao(3.9) que al ´em de considerar o raio de alcance do sensor (Rs), t ˆem em considerac¸ ˜ao um valor (Ru)que representa a dist ˆancia onde um ponto de interesse tem uma baixa taxa de probabilidade de ser detetado mas que ainda n ˜ao se encontra fora de alcance do dispositivo.
f (d(s, p)) = 1, d(s, p) ≤ Rs − Ru Ce−(α(d(s,p)−(Rs−Ru)β), R s− Ru < d(s, p) ≤ Rs
0, caso contr´ario
(3.9)
Neste projeto vamos representar cada dispositivo sensor como uma circunfer ˆencia que tem o dispositivo no seu centro e o seu raio ´e determinado pelo raio de alcance do sensor. Este ´e talvez o m ´etodo mais comum presente na literatura para definir um sensor e da´ı resulta a nossa escolha.
3.2.2 Modelos de Conectividade
Os modelos de conectividade centram-se na tem ´atica de comunicac¸ ˜ao entre n ´os numa rede de sensores sem fios. Assume-se que um dispositivo est ´a apto a comunicar apenas at ´e uma certa dist ˆancia limite, representada como o raio de comunicac¸ ˜ao (Rc).Quando os n ´os possuem diferentes raios de comunicac¸ ˜ao de acordo com o seu poder de transmiss ˜ao, dois n ´os Sie Sjcomunicam, se a dist ˆancia euclidiana entre eles ´e menor ou igual ao m´ınimo dos seus raios (3.10), ou seja, o n ´o com menor Rc´e abrangido pelo raio de comunicac¸ ˜ao do outro n ´o. Quando dois dispositivos se encontram nesta situac¸ ˜ao, est ˜ao aptos a comunicar entre si e s ˜ao geralmente chamados de vizinhos.
d(si, sj) ≤ min{Rci, Rcj} (3.10)
Uma rede de sensores, pode ent ˜ao ser caracterizada como um grafo onde cada n ´o repre-senta um dispositivo sensor e a dist ˆancia que separa os n ´os vizinhos reprerepre-sentam os arcos que os ligam.
O poder do sinal recebido Pr , por parte de um n ´o ´e dado por (3.11), e tem em conta o poder do sinal transmitido Ps e um valor sobre a dist ˆancia entre os pontos η que repre-senta o expoente de perda de percurso situado entre 2 e 6 dependendo das condic¸ ˜oes ambientais[7].
Pr = Ps d(si, sj)η
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 39
Ao longo do tempo de vida de uma rede de sensores sem fios pode acontecer que um ou v ´arios n ´os recebam sinais que n ˜ao eram supostos ou previstos, o que pode resultar em al-gumas interfer ˆencias. A comunicac¸ ˜ao estre dispositivos ´e tamb ´em afetada pelas condic¸ ˜oes do meio onde a rede se encontra seja por ru´ıdo, vegetac¸ ˜ao, edif´ıcios, m ´aquinas ou qualquer outro tipo de obst ´aculos que possa de alguma forma interferir com a comunicac¸ ˜ao entre dispositivos. Na hora de planear a instalac¸ ˜ao de uma rede de sensores sem fios, torna-se importante analisar o espac¸o f´ısico onde torna-ser ´a implementada e ter em conta este tipo de situac¸ ˜oes para garantir um funcionamento correto da rede assim como valores mais precisos.
3.2.3 Controlo de cobertura e conectividade
O controlo de cobertura e conectividade centraliza-se na quest ˜ao da qualidade e capa-cidade que uma rede de sensores sem fio possui, com heterogeneidade de sensores e diferentes localizac¸ ˜oes geogr ´aficas, para garantir conectividade entre dispositivos e maxi-mizar a cobertura de determinada ´area.
O primeiro desafio numa RSSF centra-se no facto de como cobrir perfeitamente uma regi ˜ao a monitorizar por isso, a conectividade e a cobertura s ˜ao dois dos mais importantes problemas neste tipo de redes e t ˆem grande impacto na sua performance. Uma boa estrat ´egia de distribuic¸ ˜ao, um bom mecanismo de gest ˜ao de operac¸ ˜ao dos dispositivos e o raio de cobertura da rede, pode n ˜ao s ´o reduzir custos como aumentar o seu tempo de vida.
Segundo as definic¸ ˜oes te ´oricas a cobertura m ´axima define que todos os pontos localiza-dos em determinada ´area a monitorizar est ˜ao cobertos por pelo menos um sensor e a conectividade requer que a rede seja conexa no que diz respeito ao raio de comunicac¸ ˜ao de cada dispositivo. Ou seja, a cobertura ´e afetada pela sensibilidade do sensor do dispo-sitivo em detetar fen ´omenos do meio e a conectividade recai mais sobre a capacidade do alcance do raio de comunicac¸ ˜ao. Estas duas vari ´aveis est ˜ao intrinsecamente relacionadas com o ambiente onde est ´a implementada a rede, ou seja, a performance dos servic¸os ´e influenciada por ruido e interfer ˆencias causadas por diversos fatores como por exemplo, obst ´aculos presentes na ´area a monitorizar.
O n ´umero de dispositivos que uma RSSF cont ´em n ˜ao garante, por si s ´o, uma ´otima cobertura e conectividade da rede. A quantidade de dispositivos presentes numa rede ´e vari ´avel conforme a aplicac¸ ˜ao e os requisitos esperados do sistema, n ˜ao existindo um limite definido para a quantidade de n ´os que uma RSSF deve conter de forma garantir a
3.2. COBERTURA E CONECTIVIDADE DE UMA RSSF 40
efic ´acia do servic¸o.
Em [15] a densidade de n ´os presentes numa determinada ´area ´e dada segundo NA onde N representa um n ´umero de n ´os aleatoriamente distribu´ıdos por uma determinada ´area A. Quando existe um n ´umero relativamente elevado de n ´os sensores por ´area de interesse a rede ´e classificada como densa, sendo esta soluc¸ ˜ao utilizada em situac¸ ˜oes em que a detec¸ ˜ao de todos os eventos ´e de extrema import ˆancia ou simplesmente quando ´e relevante ter m ´ultiplos n ´os sensores a cobrir determinada ´area, seja para melhorar a cober-tura ou a conectividade ou para garantir determinado requisito protocolar. Pelo contr ´ario, quando a rede cont ´em poucos n ´os sensores por unidade de ´area, a rede classifica-se como esparsa. Este tipo de redes ´e ´util quando o custo dos sensores torna invi ´avel a construc¸ ˜ao de uma rede mais densa ou quando se deseja obter uma cobertura total da
´area com o m´ınimo de dispositivos necess ´arios.
3.2.4 Mobilidade
Como j ´a mencionado em cap´ıtulos anteriores, uma RSSF pode classificar-se como m ´ovel devido `a presenc¸a de dispositivos com capacidade motora que se deslocam ao longo do espac¸o de interesse de acordo com a necessidade. O facto ´e que a maioria dos estudos assume que os dispositivos s ˜ao est ´aticos e que a sua posic¸ ˜ao n ˜ao se altera desde do ponto de instalac¸ ˜ao inicial.
Ao utilizar n ´os m ´oveis na concec¸ ˜ao da RSSF podemos elevar a performance de cobertura de uma rede estacion ´aria, n ˜ao obstante que um n ´o se pode deslocar do seu ponto inicial por motivos relativos ao meio ambiente onde se encontram como fortes ventos, ondas ou animais, a aquisic¸ ˜ao de n ´os que suportem mobilidade ´e geralmente mais dispendiosa que os n ´os est ´aticos. Contudo, a adic¸ ˜ao de dispositivos com capacidades m ´oveis pode melhorar e garantir a total cobertura de uma rede de forma continua cobrindo regi ˜oes que podem n ˜ao ser alcanc¸ ´aveis pelos n ´os est ´aticos ou simplesmente ser utilizados como dispositivos de recolha de dados de outros dispositivos est ´aticos instalados numa ´area de interesse com dimens ˜oes elevadas.
Como exemplo deste tipo de abordagem temos algoritmo proposto em [16] que ap ´os a formac¸ ˜ao inicial da rede, cada dispositivo sensor tem a capacidade de determinar a melhor posic¸ ˜ao para onde se deve mover de modo a garantir m ´axima cobertura, contudo ´e necess ´ario que este dispositivo esteja dentro do alcance do raio de cobertura de outros dispositivos para determinar a sua localizac¸ ˜ao relativa e determinar qual o ponto ideal onde se deve colocar. Em [17] encontramos um m ´etodo diferente em que cada n ´o comunica com os seus vizinhos de forma a determinar uma dist ˆancia espec´ıfica que os pode distanciar