NILSON FELIPE MATOS MENDES
T´
ECNICAS DE OTIMIZAC
¸ ˜
AO COMBINAT ´
ORIA APLICADAS
A CRIAC
¸ ˜
AO DE ESTRAT´
EGIAS DE POLICIAMENTO
Disserta¸c˜ao apresentada `a Universidade Federal de Vi¸cosa, como parte das exigˆencias do Programa de P´os-Gradua¸c˜ao em Ciˆencia da Computa¸c˜ao, para obten¸c˜ao do t´ıtulo de Magister Scientiae
VIC¸ OSA
Ficha catalográfica preparada pela Biblioteca Central da Universidade Federal de Viçosa - Câmpus Viçosa
T
Mendes, Nilson Felipe Matos,
1991-M538t
2015
Técnicas de otimização combinatória aplicadas a criação de
estratégias de policiamento urbano / Nilson Felipe Matos
Mendes. – Viçosa, MG, 2015.
viii, 85f. : il. ; 29 cm.
Orientador: André Gustavo dos Santos.
Dissertação (mestrado) - Universidade Federal de Viçosa.
Referências bibliográficas: f.79-85.
1. Processos decisórios - Processamento de dados.
2. Pesquisa operacional. 3. Modelos matemáticos.
4. Programação linear. 5. Probabilidades. 6. Estatística
matemática. 7. Teoria das filas. 8. Segurança pública.
9. Patrulhamento policial. I. Universidade Federal de Viçosa.
Departamento de Informática. Programa de Pós-graduação em
Ciência da Computação. II. Título.
Agrade¸co a Deus por me dar for¸cas para concluir essa etapa da minha forma¸c˜ao, aos meus pais, familiares e amigos pelo apoio, ao meu orientador Andr´e Gustavo dos Santos por me guiar durante a realiza¸c˜ao deste projeto e a Coordena¸c˜ao de Aper-fei¸coamento de Pessoal de N´ıvel Superior (CAPES) pelo financiamento da minha bolsa durante o curso.
Sum´
ario
Lista de ilustra¸c˜oes . . . v
Lista de tabelas . . . v
Resumo . . . vii
Abstract . . . viii
1 INTRODUC¸ ˜AO GERAL . . . 1
1.1 Objetivos . . . 3
1.2 Resultados . . . 3
1.2.1 Modelo determin´ıstico . . . 3
1.2.2 Modelo estoc´astico . . . 5
2 M´ETODOS PARA O PROBLEMA DE POSICIONAMENTO DE UNIDADES POLICIAIS . . . 7
2.1 Introdu¸c˜ao . . . 7
2.2 Referˆencial Te´orico . . . 9
2.3 Materiais e m´etodos . . . 10
2.3.1 Modelo matem´atico . . . 10
2.3.2 Heur´ıstica construtiva . . . 12
2.3.3 Busca Tabu . . . 13
2.3.4 Simulated Annealing . . . 14
2.4 Descri¸c˜ao do experimento . . . 14
2.5 Resultados e Discuss˜ao . . . 15
2.6 Conclus˜ao. . . 20
3 HEUR´ISTICA BASEADA EM BUSCA TABU PARA O POSICIO-NAMENTO DE UNIDADES POLICIAIS . . . 21
3.1 Introdu¸c˜ao . . . 21
3.2 Referencial Te´orico . . . 23
3.3 Materiais e m´etodos . . . 26
3.3.1 Modelo matem´atico . . . 26
3.3.2 Heur´ıstica construtiva gulosa . . . 28
3.3.3 Busca Tabu . . . 29
3.3.4 Estrat´egia de penaliza¸c˜ao de solu¸c˜oes invi´aveis . . . 30
3.4 Descri¸c˜ao dos experimentos . . . 33
3.5 Resultados e Discuss˜ao . . . 34
3.6 Conclus˜ao. . . 42
4.1 Introduction . . . 45
4.2 Review . . . 47
4.3 Material and methods . . . 51
4.3.1 The Hypercube Queuing model . . . 51
4.3.2 Jarvi’s Approximation . . . 53
4.3.3 Police Units Allocation Model . . . 54
4.3.4 Minimum Expected Response Location Problem . . . 56
4.3.5 MERLP With Mandatory Expected Closeness Constraints . . . 57
4.3.6 VND Heuristic . . . 58
4.4 Experiment description . . . 61
4.5 Results and discussion . . . 62
4.5.1 Default action radius size . . . 63
4.5.2 Larger action radius . . . 65
4.5.3 Results with demand and service time variations . . . 71
4.5.4 Conclusion . . . 73
5 CONCLUS˜AO GERAL . . . 77
REFERˆENCIAS BIBLIOGR ´AFICAS . . . 79
Lista de ilustra¸c˜
oes
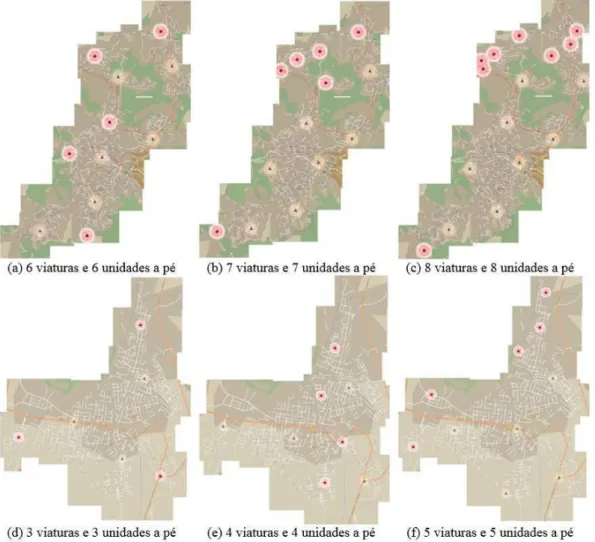
Figura 1 – Os triˆangulos azui representam as viaturas e os pontos vermelhos uni-dades de policiais a p´e. As figuras 2(a), 2(b) e 2(c) ilustram as solu¸c˜oes na cidade de Vi¸cosa-MG e 2(d), 2(e) e 2(f) na cidade de Salinas-MG. . 16
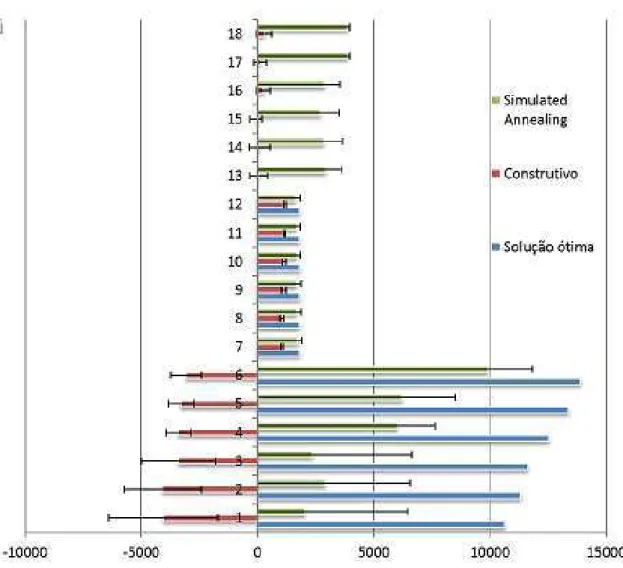
Figura 2 – Comparativo entre os algoritmos simulated annealing, construtivo e solu¸c˜ao exata, com desvios padr˜ao assinalados pelos tra¸cos em preto em cada barra do gr´afico. As instˆancias 5, 6, 16, 17 e 18 n˜ao alcan¸caram nenhuma resposta em duas horas. . . 18
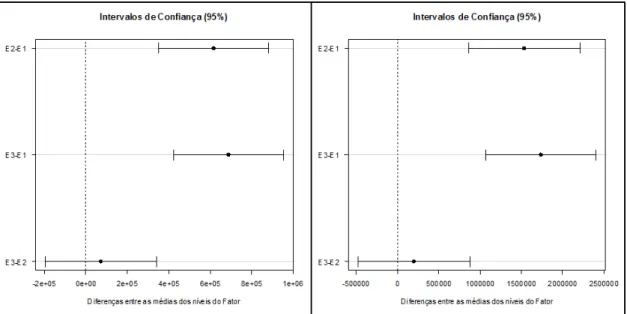
Figura 3 – Gr´afico comparativo do teste de Tukey sobre os valores de fun¸c˜ao ob-jetivo obtidos por diferentes vers˜oes da busca. E1) Busca tabu original mas j´a com nova penaliza¸c˜ao; E2) Busca tabu com expans˜ao da busca local; E3) Busca tabu com intensifica¸c˜ao. Resultados correspondentes as instˆancias Salinas 1 (esquerda) e Vi¸cosa 1 (direita). . . 39
Figura 4 – Comparative of number of feasible solutions got by VND with Tabu Search initialization using different services times. Larger action radius - Vi¸cosa . . . 74
Lista de tabelas
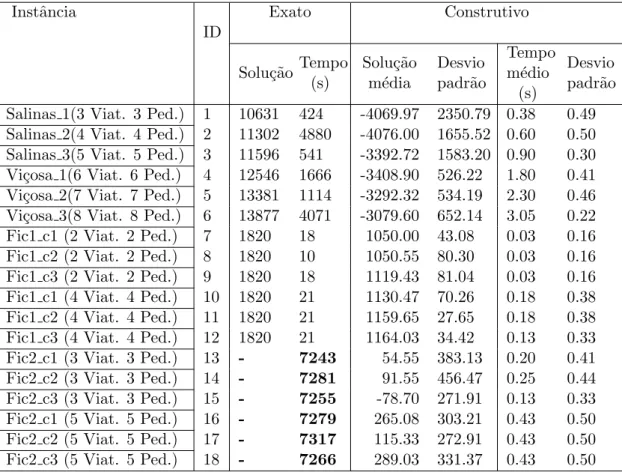
Tabela 1 – Comparativo entre os resultados da solu¸c˜ao do modelo matem´atico e do algoritmo construtivo. Os valores em destaque indicam valores n˜ao ´
otimos, obtidos ao fim de duas horas. Na descri¸c˜ao das instˆancias est´a explicito o n´umero de viaturas (Viat.) e unidades a p´e (Ped.) em cada 17
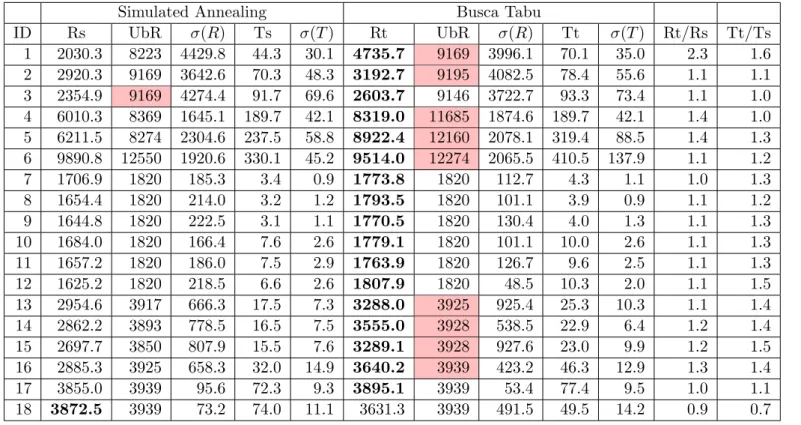
Tabela 2 – Comparativo entre o desempenho das heur´ısticas simulated annealing e busca tabu. Em negrito, a maior resposta m´edia e com o fundo destacado, a maior resposta individual. Lista de siglas: Rs – Resposta m´edia do simulated annealing; Rt – Resposta m´edia da busca tabu; UbR Melhor resposta; σ(R) – Desvio padr˜ao da resposta; T – Tempo
m´edio; σ(T) – Desvio padr˜ao do tempo . . . 19
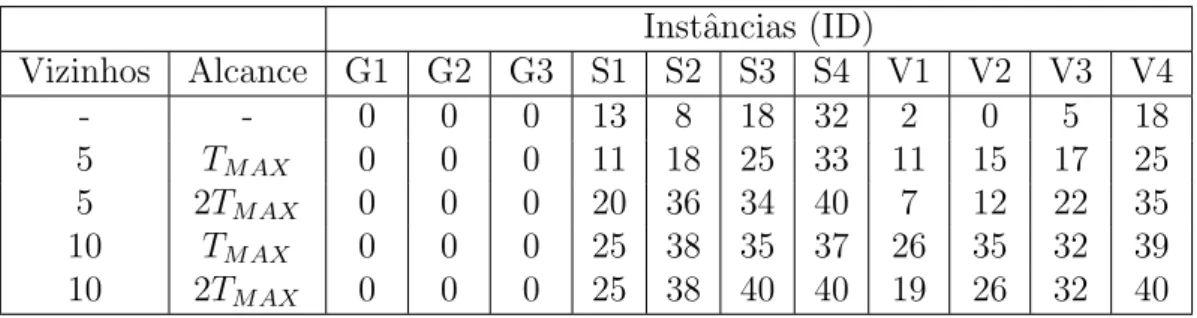
Tabela 3 – Configura¸c˜ao das instˆancias testadas . . . 34
Tabela 4 – Comparativo entre a quantidade de respostas fact´ıveis obtidas usando diferentes tipos de penaliza¸c˜ao. . . 34
Tabela 5 – Comparativo entre a quantidade de respostas fact´ıveis obtidas de acordo com o tipo de busca local utilizado. . . 35
Tabela 6 – Comparativo do n´umero de solu¸c˜oes fact´ıveis obtidas com a expans˜ao da busca local e vers˜oes distintas do algoritmo construtivo . . . 36
de parada . . . 37 Tabela 8 – Comparativo do n´umero de solu¸c˜oes fact´ıveis obtidas com e sem a
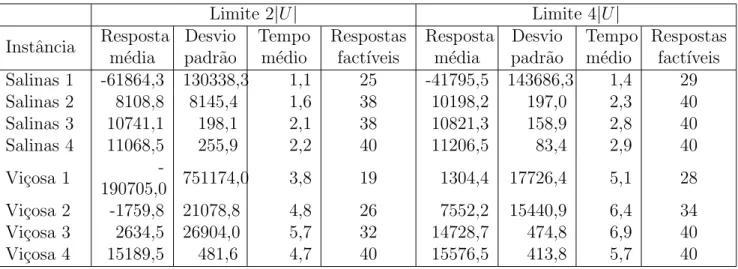
in-tensifica¸c˜ao da busca local . . . 38 Tabela 9 – Tabela comparativa entre os resultados obtidos na busca tabu com
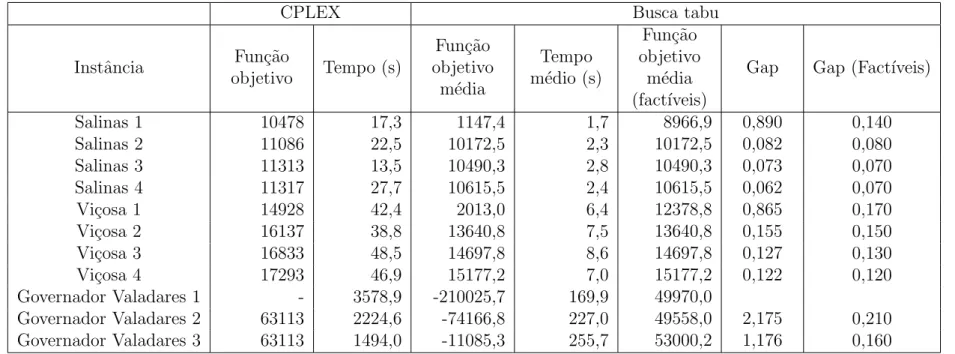
intensifica¸c˜ao (vers˜ao E3 conforme Figura 3) e a solu¸c˜ao exata obtida via CPLEX. . . 41 Tabela 10 – Comparison of results got by the VND heuristic with different
initiali-zations. Default action radius - Vi¸cosa . . . 64 Tabela 11 – Comparison of results got by the VND heuristic with different
initiali-zations. Default action radius - Governador Valadares . . . 65 Tabela 12 – Comparison of average run-times of diferent initializations of VND and
their components . . . 65 Tabela 13 – Results obtained by the VND heuristic with tabu search initialization.
Larger action radius - Governador Valadares . . . 67 Tabela 14 – Comparison of results found by the VND heuristic with different
initi-alizations. Larger action radius - Vi¸cosa . . . 70 Tabela 15 – Comparison of results found by the VND heuristic with different levels
of demand. Larger action radius - Vi¸cosa . . . 72
Resumo
MENDES, Nilson Felipe Matos, M.Sc., Universidade Federal de Vi¸cosa, Setembro de 2015. T´ecnicas de Otimiza¸c˜ao Combinat´oria Aplicadas a Cria¸c˜ao de Estrat´egias de Policiamento Urbano. Orientador: Andr´e Gustavo dos Santos.
O provimento de seguran¸ca p´ublica ´e uma quest˜ao de grande relevˆancia na adminis-tra¸c˜ao p´ublica e que interfere diretamente na qualidade de vida das pessoas. Dentre v´arios fatores que podem tornar uma sociedade mais ou menos segura, est´a a boa organiza¸c˜ao e uso das for¸cas policiais. Este trabalho apresenta uma abordagem computacional baseada em t´ecnicas de Pesquisa Operacional para o problema de aloca¸c˜ao de for¸cas policiais em uma ´area urbana. Tal problema consiste em deter-minar onde unidades policiais, a p´e ou em algum ve´ıculo, devem ser posicionadas de forma a prover uma cobertura eficiente de uma ´area, de acordo com crit´erios pr´e-determinados. S˜ao apresentados dois modelos matem´aticos para descrever o problema. O primeiro ´e um modelo determin´ıstico baseado no modelo de cobertura m´axima gradual e no modelo de cobertura m´axima com restri¸c˜oes de obrigatoriedade de proximidade. Ele aparece em duas vers˜oes, com poucas diferen¸cas entre si, sendo a ´ultima mais r´apido de ser resolvido por softwares de otimiza¸c˜ao inteira-mista, tal como o CPLEX. Al´em da solu¸c˜ao exata, foram propostos algoritmos baseados em simulated annealing e busca tabu para resolu¸c˜ao de grandes instˆancias. O segundo modelo ´e estoc´astico, baseado na teoria das filas, no Modelo De Filas em Hipercubo (Hypercube Queuing Model), no MERLP(Maximal Expected Response Location Pro-blem) e no primeiro modelo. Para este modelo, foi proposta uma heur´ıstica baseada no VND (Variable Neighborhood Descent), com inicializa¸c˜ao por busca tabu.
MENDES, Nilson Felipe Matos, M.Sc., Universidade Federal de Vi¸cosa, September, 2015. Combinatorial Optimization Techniques Applied to the Creation of Strategies for Urban Policing. Adviser: Andr´e Gustavo dos Santos.
The public security provision is a matter of great importance in public administra-tion that directly affects the quality of life. Among many factors that can turn a society a more or less safe, is the good organization and use of police forces. This work presents a computational approach based on Operations Research techniques to the problem of police forces allocation in an urban area. Such problem is to define where police units, on foot or in a vehicle, should be positioned to provide efficient coverage of an area, according to predetermined criteria. Two mathematical models are presented to describe the problem. The first is a deterministic model based on gradual maximum coverage model and maximum coverage model with proximity mandatory restrictions. It appears in two versions, with few differences between them, and the last is faster to be solved by a mixed-integer optimization software, such as CPLEX. Besides the exact solution we have proposed algorithms based on simulated annealing and tabu search for solving large instances. The second model is stochastic, based on queuing theory, the Hypercube Queuing Model, the MERLP (Maximal Expected Response Location Problem) and the first model. For this mo-del, a heuristic based on VND (Variable Neighborhood Descent) was proposed, using a tabu search to provide a initial solution.
1
1 Introdu¸c˜
ao Geral
A seguran¸ca p´ublica ´e uma das ´areas de maior interesse e preocupa¸c˜ao da ad-ministra¸c˜ao p´ublica. Ela impacta diretamente na qualidade de vida da popula¸c˜ao e sobre sua percep¸c˜ao de bem estar.
No Brasil, esta quest˜ao est´a no centro das aten¸c˜oes h´a pelo menos uma d´ecada, devido aos altos ´ındices de criminalidade, que colocam o pa´ıs nas listas de pa´ıses mais violentos do mundo.
Dentro do intenso debate ideol´ogico a cerca de quais medidas devem ser tomadas para tornar uma ´area mais segura, frequentemente s˜ao apontadas a falta de um bom treinamento e estrat´egia de a¸c˜ao das for¸cas policiais.
Existe tamb´em uma falta de planejamento, que reflete na maneira em que s˜ao alocados os policiais e executado os patrulhamentos. Em grande parte das vezes, n˜ao existe uma estrat´egia s´olida de policiamento ou quando existe, ela baseia-se apenas na experiˆencia dos policiais encarregados do servi¸co.
Outro ponto importante ´e a falta de cultura de utiliza¸c˜ao de ferramentas com-putacionais no processo de tomada de decis˜ao ou gerenciamento de dados pelos ´org˜aos policiais do Brasil. Embora possamos encontrar trabalhos relatando projetos de utiliza¸c˜ao de recursos computacionais nos Estados Unidos, datando do inicio da d´ecada de 1970 (CERQUEIRA, 2005), no Brasil essa pr´atica ainda ´e incipiente. A isso se soma a falta de compartilhamento desses dados entre institui¸c˜oes que deve-riam trabalhar de maneira colaborativa, por exemplo, Policia Civil, Militar e Federal, (GOMES, 2009) e a baixa quantidade de pesquisa cient´ıfica na ´area de softwares de apoio a decis˜ao voltados para seguran¸ca p´ublica no pa´ıs.
´
E neste contexto que este trabalho se insere. Visa-se, atrav´es dos modelos e t´ecnicas de otimiza¸c˜ao combinat´oria apresentadas a seguir, prover uma ferramenta computacional para auxiliar o planejamento do patrulhamento policial. Mais espe-cificamente, deseja-se determinar onde cada uma das unidades dispon´ıveis devem ser alocadas, considerando caracter´ısticas tais como: estat´ısticas de criminalidade, o meio de transporte utilizado pelos policiais, a topologia da cidade, o raio de a¸c˜ao de cada unidade, etc; de forma a maximizar ou minimizar alguma m´etrica de eficiˆencia. Para isso, foram propostos dois modelos matem´aticos para descrever o problema e, por conseguinte, testados m´etodos de resolu¸c˜ao destes usando alguns softwares de otimiza¸c˜ao inteira-mista e algumas heur´ısticas.
cruzamentos ou curvas como um v´ertice. Atribuindo-se um lucro a cobertura de cada uma das arestas, busca-se encontrar uma disposi¸c˜ao das unidades nos v´ertices de forma a maximizar o lucro resultante da cobertura das arestas dentro um raio de a¸c˜ao.
Foram testados, para a resolu¸c˜ao, o uso do Symphony (RALPHS; G ¨UZELSOY, 2005), uma biblioteca open source de resolu¸c˜ao de problemas inteiros-mistos, uma heur´ıstica baseada no simulated annealing e uma heur´ıstica baseada na busca tabu, sendo que, para haver uma melhor avalia¸c˜ao das diferen¸cas de desempenho entre as duas heur´ısticas, o crit´erio de parada foi aproximadamente o mesmo para ambos.
Depois de se executar algumas mudan¸cas na defini¸c˜ao das vari´aveis do modelo, foram utilizados o solver comercial Cplex e algumas vers˜oes melhoradas da busca tabu utilizadas anteriormente. Dentre as melhoras na busca tabu, as mais relevantes foram a inclus˜ao de um novo m´etodo de penaliza¸c˜ao de respostas infact´ıveis e uma etapa de pertuba¸c˜ao para tentar cobrir arestas de dif´ıcil acesso.
O segundo modelo ´e, tamb´em, um modelo de cobertura, mas desta vez es-toc´astica. Ele ´e uma adapta¸c˜ao do Minimum Expected Response Location Problem, desenvolvido para descrever a aloca¸c˜ao de ambulˆancias por Rajagopalan e Saydam (RAJAGOPALAN; SAYDAM, 2009). Este usa um outro modelo proposto por Lar-son (LARSON, 1974) para descrever sistemas de filas em que os servidores v˜ao at´e os clientes atendˆe-los: o Modelo de Filas em Hipercubo (Hypercube Queuing Model). Nesta adapta¸c˜ao, foram inclu´ıdas as restri¸c˜oes de obrigatoriedade de proximidade presentes no primeiro modelo.
Para a resolu¸c˜ao do modelo estoc´astico, usou-se duas t´ecnicas: o algoritmo de aproxima¸c˜ao de Jarvis (JARVIS, 1985), para uma r´apida determina¸c˜ao dos valo-res dos parˆametros oriundos da fila em hipercubo e uma heur´ıstica baseada na meta-heur´ıstica VND (Variable Neighborhood Descent) para percorrer o espa¸co de solu¸c˜oes.
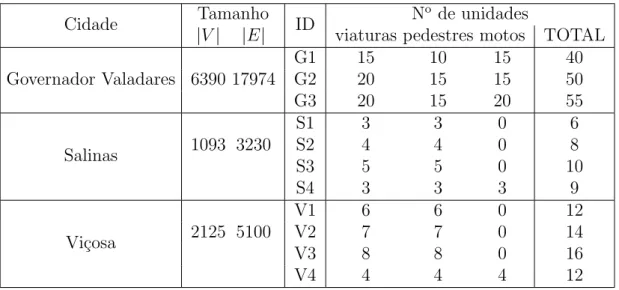
Foram utilizados dados reais da topologia de trˆes cidades do estado de Minas Gerais, de diferentes portes: Salinas (aprox. 40 mil habitantes), Vi¸cosa (aprox. 80 mil habitantes) e Governador Valadares (aprox. 250 mil habitantes). Estes dados foram coletados a partir de mapas das trˆes cidades importados para o software Ge-ogebra, com o qual foi poss´ıvel tra¸car um grafo representando todos os cruzamentos das vias e assim obter-se os dados de comprimento dos logradouros e adjacˆencia das esquinas.
1.1. OBJETIVOS 3 testes, indices gerados de maneira aleat´oria.
1.1
Objetivos
O objetivo geral deste trabalho foi a cria¸c˜ao e an´alise de t´ecnicas de aux´ılio `a decis˜ao, baseadas em t´ecnicas de otimiza¸c˜ao combinat´oria, para o problema de planejamento de opera¸c˜oes de patrulha policial est´atica ou m´ovel. Para que esse objetivo fosse alcan¸cado, alguns outros objetivos secund´arios tamb´em precisaram ser cumpridos, tais como:
• Coletar dados reais que ajudem a pol´ıcia em sua tarefa de planejamento de a¸c˜ao.
• Propor um modelo de cobertura determin´ıstica para ajudar na tarefa de alocar unidades policiais em uma ´area urbana, obedecendo as restri¸c˜oes de efetivo dispon´ıvel.
• Pesquisar, analisar, comparar e propor m´etodos de atua¸c˜ao das for¸cas policiais que possam ser descritas e testadas atrav´es de modelos matem´aticos.
• Propor m´etodos heur´ısticos eficientes para a resolu¸c˜ao do modelo de cober-tura determin´ıstico que sejam capazes de lidar com instˆancias que descrevem cidades ao menos de m´edio porte.
• Propor um modelo de cobertura estoc´astica que seja capaz de lidar com as caracter´ısticas de imprevisibilidade e urgˆencia t´ıpicas dos servi¸cos de atendi-mento a ocorrˆencias policiais.
• Propor m´etodos de resolu¸c˜ao para modelos estoc´asticos que sejam, ao mesmo tempo, eficientes em encontrar boas respostas e n˜ao necessitem de grandes recursos computacionais ou tempo para serem executados.
1.2
Resultados
Nos Cap´ıtulos 2 a 4 s˜ao apresentados os resultados obtidos neste trabalho. Mais especificamente: o Cap´ıtulo 2 refere-se aos resultados obtidos pelo simulated anne-aling e busca tabu com a primeira vers˜ao do modelo determin´ıstico; o Cap´ıtulo 3 refere-se aos resultados obtidos pela vers˜ao melhorada da busca tabu com a segunda vers˜ao do modelo determin´ıstico; e o Cap´ıtulo 4 refere-se aos resultados obtido com o algoritmo VND com o modelo estoc´astico.
1.2.1
Modelo determin´ıstico
de homens e ve´ıculos e uma cidade, descrita atrav´es de um grafo, com as ruas sendo arestas e os cruzamentos v´ertices, busca-se dizer onde cada grupo de policiais de-ver´a estar para conseguir uma cobertura que propicie uma maior recompensa. Para definir a recompensa da cobertura, ´e associado a cada rua (aresta) um lucro por esta ser coberta. J´a para definir se a rua ´e coberta, ´e determinado um limite para o raio de a¸c˜ao, dependente da forma de locomo¸c˜ao da unidade. Uma vez que uma rua possa ser alcan¸cada por uma unidade qualquer, em um tempo menor que este limite, esta ser´a considerada coberta.
As restri¸c˜oes do modelo determinam que todas as ruas devem ser consideradas cobertas se dobrarmos o limite para o raio de a¸c˜ao (restri¸c˜ao de obrigatoriedade de demanda) e que sejam respeitados o n´umero de unidades dispon´ıveis e seus alcances.
Na primeira vers˜ao do modelo, uma vari´avel bin´aria definiu se deveria ser alocada uma unidade de um determinado tipo em um v´ertice, para cada v´ertice e cada tipo de unidade. Para resolver esta vers˜ao foi utilizada a biblioteca Symphony (RALPHS; G ¨UZELSOY, 2005) e duas heur´ısticas, uma baseada em busca tabu e outra no simulated annealing, sendo os testes executados com duas cidades fict´ıcias e duas cidades reais, Vi¸cosa e Salinas, ambas localizadas no estado de Minas Gerais.
Com o uso de um tempo de execu¸c˜ao limite de duas horas, o Symphony n˜ao apresentou resposta para as instˆancias de uma das cidades fict´ıcias e para algumas das instˆancias das cidades reais chegou a gastar mais de uma hora para chegar ao resultado ´otimo.
As duas heur´ıstica apresentaram uma dificuldade em encontrar solu¸c˜oes fact´ıveis em todas as instˆancias, embora tenham conseguido muitas vezes bons valores de fun¸c˜ao objetivo. A busca tabu, nos testes, mostrou ter um desempenho superior ao do simulated annealing.
Na segunda vers˜ao do modelo, a vari´avel bin´aria que indicava se havia unidades de um dado tipo em cada v´ertice se tornou uma vari´avel inteira, indicando agora a quantidade de unidades de cada tipo alocada no v´ertice. Essa mudan¸ca trouxe uma grande melhora no tempo da resolu¸c˜ao exata e, junto com a mudan¸ca para o solver CPLEX, fez com que o tempo gasto para se chegar a resposta ´otima caisse para menos de uma hora, menos nas instˆancias da cidade de Governador Valadares-MG.
1.2. RESULTADOS 5 chegar a resposta ´otima, com um gap de no m´aximo 22% considerando apenas as solu¸c˜oes fact´ıveis.
1.2.2
Modelo estoc´
astico
No Cap´ıtulo 4 ´e apresentado um modelo de cobertura estoc´astico, inspirado no
Minimum Expected Response Location Problem - MERLP, definido por Rajagopa-lan e Saydam (RAJAGOPALAN; SAYDAM, 2009) para descrever um problema de ambulˆancias. Foram adicionadas algumas restri¸c˜oes para simular a condi¸c˜ao de obrigatoriedade de proximidade presente no modelo determin´ıstico dos Cap´ıtulos 2 e 3 e que, devido a sua forma, podem ser facilmente adaptados ao contexto do patrulhamento e atendimento policial.
O objetivo maior nesse capitulo foi testar a viabilidade da abordagem utilizando o modelo de filas em hipercubo do que propriamente fazer uma avalia¸c˜ao do de-sempenho da heur´ıstica apresentada. Ainda assim, foi apresentado um algoritmo baseado na meta-heur´ıstica VND com dois m´etodos de inicializa¸c˜ao da solu¸c˜ao, um aleat´orio e outro baseado na maximiza¸c˜ao da cobertura (t´ecnica semelhante a utili-zada em (RAJAGOPALAN; SAYDAM, 2009)), atrav´es do algoritmo de busca tabu utilizado no Cap´ıtulo 3. Nos testes realizados foram utilizados os dados das cida-des de Governador Valadares e Vi¸cosa. Os valores dos lucros da cobertura de cada aresta foram usados para definir a demanda esperada.
Nos testes, viu-se que o algoritmo proposto n˜ao foi capaz de encontrar solu¸c˜oes vi´aveis usando os mesmo raios de a¸c˜ao utilizados nos cap´ıtulos anteriores. Entre-tanto, ao se aumentar a velocidade m´edia das unidades (aumentando, consequente-mente, o raio de a¸c˜ao destas), os resultados foram bastante satisfat´orios.
7
2 M´etodos para o problema de
posiciona-mento de unidades policiais
1
Resumo
A seguran¸ca ´e uma das ´areas que mais exige aten¸c˜ao na admi-nistra¸c˜ao p´ublica, tendo consequˆencias diretas no bem estar da sociedade. Criar estrat´egias de conten¸c˜ao de delitos, assim como r´apido atendimento a situa¸c˜oes emergenciais quando elas surgem ´e um desafio. Neste trabalho, busca-se utilizar de t´ecnicas de Pes-quisa Operacional para resolver o problema de posicionamento de unidades policiais, de forma a maximizar a cobertura policial em uma cidade. ´E proposto um modelo matem´atico para descrever o problema e dois m´etodos heur´ısticos, baseados em Busca Tabu e Simulated Annealing para resolvˆe-lo. Os resultados mostram que a Busca Tabu teve um desempenho superior ao do Simulated An-nealing e que, para as instˆancias testadas, na maioria dos casos o modelo pode ser resolvido em tempos inferiores a trinta minutos.
Abstract
Safety is one of most exigent areas in public administration, having direct consequences on people welfare. Creating contention strate-gies for crimes or a fast answer to emergencies situations when they arise is a challenge. In this paper, we use Operations Research tech-niques for solving the problem of police units positioning, in order to maximize the police coverage in a city. We propose a model for describing the problem and heuristic methods based on tabu search and simulated annealing for solving it. The results show that tabu search had presented a better performance than simulated annea-ling and also, for the tested instances, on most of cases, the model could be solved in less than thirty minutes.
2.1
Introdu¸c˜
ao
A quest˜ao da seguran¸ca p´ublica ´e um dos pontos chaves de qualquer pol´ıtica de bem estar social. ´E pouco razo´avel pensar-se em satisfa¸c˜ao de uma qualidade m´ınima de vida para a popula¸c˜ao sem que essa tenha seguran¸ca. Em ´areas urbanas, os n´ıveis de criminalidade costumam causar maiores preocupa¸c˜oes do que em ambientes rurais,
1 Neste cap´ıtulo est´a inclu´ıdo uma vers˜ao corrigida do artigo M´etodos para o problema de
devido `a alta concentra¸c˜ao populacional, que faz o n´umero de potenciais lesados ser maior.
O provimento de seguran¸ca para a popula¸c˜ao passa, dentre outras coisas, por criar um policiamento preventivo e emergencial eficiente. Este procura evitar que crimes sejam executados, ao mesmo tempo que, sendo eles executados, o atendi-mento as v´ıtimas e o in´ıcio da busca dos criminosos sejam feitos da maneira mais r´apida poss´ıvel.
Tradicionalmente, as t´aticas de policiamento s˜ao criadas com base na experiˆencia dos agentes policiais e por um conhecimento sobre quais as ´areas com maior ´ındice de criminalidade. Entretanto, esta pr´atica pode se mostrar ineficiente, por diversos fatores, como: ´areas de grande tamanho, distribui¸c˜oes pouco ´obvias de ocorrˆencias policiais ou mesmo inabilidade dos policiais.
No Brasil, em especial, o problema da seguran¸ca p´ublica ´e motivo de preocupa¸c˜ao h´a muito tempo e vem se tornando cada vez pior. Waiselfisz (2013) mostra que a taxa de homic´ıdios por 100 mil habitantes foi de 11,7 em 1980 para um pico de 28,9 em 2003 e chegou em 2011 em 27,1. Portanto, no per´ıodo compreendido entre 1980 a 2003, observou-se um crescimento anual m´edio de 4% no n´umero de homic´ıdios por 100 mil habitantes.
Com estes n´umeros, o Brasil se destaca como um dos pa´ıses mais violentos do mundo (CERQUEIRA, 2005). A situa¸c˜ao se encontra em um n´ıvel de alarde tal que, embora o pa´ıs seja isento de disputas territoriais, movimentos emancipat´orios, guerras civis ou outros conflitos relevantes, entre 2008 e 2011, ocorreram nele mais de 200 mil homic´ıdios. Este valor ´e superior, de maneira absoluta e relativa aos 12 maiores conflitos armados do mundo entre 2004 e 2007 e quase igual ao total das mortes diretas causadas pelos 62 maiores conflitos armados do mesmo per´ıodo (WAISELFISZ, 2013).
Tais n´umeros, mesmo que desconhecidos em termos precisos, geram um medo frequente em todos, em especial nos moradores das ´areas mais violentas. Al´em disso, o fracasso das pol´ıticas de combate `a violˆencia vem criando um sentimento de instabilidade e inseguran¸ca na popula¸c˜ao (ABREU; LOURENC¸ O, 2010), que se demonstra na falta de cren¸ca na capacidade do Estado garantir seguran¸ca tanto por parte das v´ıtimas quanto dos delinquentes. A experiˆencia coletiva de insegu-ran¸ca pessoal vem fazendo com que a popula¸c˜ao se atente mais aos problemas de manuten¸c˜ao da ordem p´ublica nas cidades brasileiras (SILVA, 2004).
Para atender o anseio da popula¸c˜ao por mais seguran¸ca, uma das estrat´egias ado-tadas ´e servir a pol´ıcia de ferramentas computacionais para melhorar sua presta¸c˜ao de servi¸co e modelos integrados de gest˜ao da seguran¸ca p´ublica. Essa tendˆencia, entretanto, vem sendo observada desde os anos 70 (CERQUEIRA, 2005).
2.2. REFER ˆENCIAL TE ´ORICO 9 para apoiar o registro de eventos e sua an´alise. Entre eles,tem-se o sistema ReCap (BROWN, 1998), que une t´ecnicas de data mining e fus˜ao de dados para an´alises criminol´ogicas; o ExpertCop (FURTADO; VASCONCELOS, 2004), que serve de treinamento para policiamento preventivo; o COPLINK (CHEN et al., 2003), que permite, por exemplo, a liga¸c˜ao entre informa¸c˜oes para aux´ılio em investiga¸c˜oes; e o projeto (LESTE, 2014), desenvolvido na UFMG pelo Laborat´orio de Estat´ıstica . Neste trabalho, a tem´atica de cria¸c˜ao de dispositivos computacionais para me-lhoria dos servi¸cos policiais ser´a atacada do ponto de vista da Pesquisa Operacional. Mais especificamente, pelo uso de metaheur´ısticas, tentar-se-´a resolver o problema de posicionamento de unidades policiais em um meio urbano.
O problema supracitado parte da premissa de que, sendo necess´arios trˆes fatores para a ocorrˆencia de um crime (um ofensor motivado, um alvo dispon´ıvel e ausˆencia de um agente repressor (COHEN; FELSON, 1979)) e de que uma vez que haja policiais pr´oximos de uma certa localidade, estes fazem sua presen¸ca ser sentida por um eventual infrator; para se diminuir a quantidade de crimes que acontecem em um certo local, basta fazer com que haja uma cobertura desta por policiais, a uma distˆancia razo´avel de qualquer ponto.
Sendo assim, dada uma quantidade pr´e-definida de policiais, cada um com um raio de a¸c˜ao limitado e dependente basicamente da forma que usam para se loco-mover (viaturas, bicicletas, a p´e, etc. . . ), devemos dizer qual a melhor maneira de posicionar estes policiais, de tal forma que unidas as suas ´areas de a¸c˜ao, tenhamos uma cobertura m´axima. Trabalhamos, ainda, com a restri¸c˜ao de que toda ´area deve ser coberta por pelo menos uma unidade policial que esteja a uma distˆancia deste ponto de, no m´aximo, o dobro de seu raio de a¸c˜ao.
Nas pr´oximas se¸c˜oes, ser´a apresentado um resumo sobre trabalhos na ´area de Pesquisa Operacional que lidam com o problema de cobertura policial e as abor-dagens que eles utilizaram. Tamb´em ´e mostrado um pequeno comparativo entre o problema desse artigo e outros relacionados a resposta a emergˆencias. A seguir, ser˜ao descritos um modelo matem´atico utilizado para definir formalmente o problema e tamb´em, heur´ısticas destinadas a resolvˆe-lo. Por fim, ser˜ao exibidos os resultados obtidos por estas heur´ısticas e a compara¸c˜ao destes com os resultados obtidos via modelo matem´atico.
2.2
Referˆencial Te´
orico
d´uvidas sobre a serventia de recursos computacionais para fins policiais, os estudos dessa quest˜ao cresceram e ainda s˜ao fortes mesmo depois de quase 50 anos.
Problemas relacionados `a manuten¸c˜ao da seguran¸ca p´ublica e de maneira mais restrita, ao patrulhamento policial, est˜ao inseridos em um conjunto maior de pro-blemas, que ´e o resposta a emergˆencias. Nele, incluem-se, al´em de problemas que envolvem servi¸cos policiais, servi¸cos de ambulˆancias e de bombeiros.
De fato, pode-se notar que quando uma pessoa sofre um infarto ou quando um banco ´e assaltado, o tempo entre a chamada de socorro e o atendimento deste socorro ´e fator primordial para a satisfa¸c˜ao do requerente. Como ´e dito em (SALADIN, 1983), ambos tˆem a miss˜ao de prover um servi¸co em um determinado local, em um determinado prazo.
Entretanto, o servi¸co policial tem, algumas diferen¸cas em rela¸c˜ao a outros servi¸cos de emergˆencia. Primeiramente, a pol´ıcia tˆem al´em da fun¸c˜ao responsiva, tamb´em a preventiva, ou seja, al´em de encontrar criminosos ap´os eles efetuarem um delito, ela tamb´em deve evitar que esse delito ocorra. Segundo, os recursos policiais tem uma maior mobilidade do que, por exemplo, os do corpo de bombeiros. E, por fim, a presen¸ca de um recurso policial em um determinado ponto tem o poder de inibir a taxa de chamadas emergenciais naquele ponto, algo que dificilmente acontecer´a, por exemplo, em rela¸c˜ao a um corpo de bombeiros.
Desta forma podemos ver que, embora se possa tomar emprestado algumas solu¸c˜oes de estudos relacionados a outros servi¸cos de emergˆencia, o patrulhamento policial tem caracter´ısticas ´unicas que o tornam interessante.
Atualmente, os principais trabalhos relacionados a essa ´area concentram-se, prin-cipalmente, em constru¸c˜oes de modelos probabil´ısticos(LI et al., 2011) (LIN et al., 2013a)(BUDGE; INGOLFSSON; ERKUT, 2009a), de simula¸c˜ao via multiagentes (VASCONCELOS, 2008) (ZHANG; BROWN, 2013) de rotas de ve´ıculos e aloca¸c˜ao espacial destes. O presente trabalho, entretanto, foca a constru¸c˜ao e resolu¸c˜ao de um modelo de cobertura determin´ıstica.
2.3
Materiais e m´etodos
Nesta se¸c˜ao ser´a apresentado o modelo matem´atico utilizado para descrever o pro-blema formalmente, assim como as heur´ısticas propostas para resolvˆe-lo.
2.3.1
Modelo matem´
atico
2.3. MATERIAIS E M ´ETODOS 11 Neste modelo, assume-se que cada rua (trecho de via urbana compreendido entre dois cruzamentos) possui um comprimento, um sentido de movimenta¸c˜ao, restri¸c˜oes de passagens de certos tipos de ve´ıculos e uma importˆancia (ou lucro) associado a necessidade de ser coberta por uma unidade policial. O tempo para percorrer as ruas leva em considera¸c˜ao a velocidade m´edia que pode ser obtida em uma via, o sentido que a unidade est´a trafegando (m˜ao, contram˜ao), o tipo de unidade (unidades sens´ıveis a contram˜ao, como carros e motos, ou insens´ıveis, como unidades a p´e) e o comprimento da rua.
A cidade foi modelada como sendo um grafo ponderado e direcionado, tal que dois n´os (cruzamentos)v ewque s˜ao adjacentes sempre s˜ao unidos por duas arestas (ruas), uma indo devparawe outro fazendo o sentido contr´ario, sendo que o sentido da contram˜ao tem uma distˆancia aumentada em 50%, para simular a dificuldade das unidades sens´ıveis a contram˜aos em andar nesse sentido. Assim, uma instˆancia do problema ´e dada por um grafo G = (V, E), sendo V um conjunto de v´ertices representando os cruzamentos de ruas, e E um conjunto de arestas representando trechos de rua entre cruzamentos. Para cada aresta r ∈ E s˜ao dados o lucro lr
de sua cobertura por unidades policiais e seu comprimento dr (distˆancia entre seus
cruzamentos limitantes).
A entrada cont´em, ainda, um conjuntoU de unidades policiais dispon´ıveis. Cada unidade i ∈ U ´e de algum tipo dentre os definidos em um conjunto Q. Para cada tipo de unidade m ∈Q, trecho de rua r ∈ E e cruzamento j ∈V, s˜ao definidos os valores bin´arios prjm e p′rjm, que valem 1 se uma unidade do tipo m localizada em
j consegue cobrir o trecho r em tempo TM AX e 2TM AX respectivamente, e 0 caso
contr´ario. Tais valores s˜ao pr´e-calculados usando-se as distˆancias dr.
Para constru¸c˜ao do modelo s˜ao usadas as seguintes vari´aveis de decis˜ao:
• xij: vari´avel bin´aria igual a 1 se uma unidade i ´e alocada no local j, 0 caso
contr´ario
• ar: vari´avel bin´aria igual a 1 se o trecho de ruar´e coberto por alguma unidade
policial dentro do tempo TM AX, 0 caso contr´ario
• a′
r: similar a anterior, mas com tempo 2TM AX
O dito modelo ´e mostrado abaixo:
maxZ =X
r∈E
X
j∈V
xij ≤1, ∀i∈U (2.2)
ar ≤
X
i∈U
X
j∈V
X
m∈Q
prjmxijqim ∀r∈E (2.3)
a′r ≤X
i∈U
X
j∈V
X
m∈Q
p′rjmxijqim ∀r∈E (2.4)
X
r∈E
a′r =|E| (2.5)
(2.6)
xij ∈ {0,1}, ∀i∈U, j∈V (2.7)
ar ∈ {0,1}, ∀r ∈E (2.8)
a′r ∈ {0,1}, ∀r ∈E (2.9)
Na fun¸c˜ao objetivo (2.1), ´e contabilizado o lucro de todas arestas que s˜ao cobertas (alcan¸cadas em tempo TM AX) por ao menos uma unidade policial.
Nas restri¸c˜oes (2.2) se diz que nenhuma unidade pode ser alocada em dois locais distintos, o que seria uma impossibilidade f´ısica. Pelas restri¸c˜oes (2.3), o valor da vari´avel que define se uma aresta ´e coberta, ´e definida atrav´es da verifica¸c˜ao se existe alguma unidade alocada em um ponto suficientemente pr´oximo desta aresta. Em (2.4) ´e feita basicamente a mesma coisa, mas a distˆancia considerada ´e dobrada. Por fim, na restri¸c˜ao (2.5), temos a quest˜ao da grada¸c˜ao da cobertura sendo tratada. Ai ´e dito que toda aresta deve ser alcan¸cada por ao menos uma unidade policial num tempo m´aximo 2TM AX. As demais restri¸c˜oes indicam que todas as vari´aveis
s˜ao bin´arias.
2.3.2
Heur´ıstica construtiva
A heur´ıstica construtiva proposta para esse modelo basicamente busca um dos n´os que mais vai aumentar o valor da fun¸c˜ao objetivo naquela itera¸c˜ao, isto ´e, o n´o cuja soma dos lucros associados as arestas que ele cobrir e que ainda n˜ao foram cobertas for m´aximo.
Existem|Q|listas distintas de n´os associados aos lucros que ele pode gerar. Estas listas s˜ao ordenadas do n´o mais lucrativo para o n´o menos lucrativo.
Em cada itera¸c˜ao do algoritmo, ´e selecionado aleatoriamente um tipo de unidade que ainda possui alguma unidade dispon´ıvel. Em havendo apenas um ´unico tipo com unidades dispon´ıvel, ele ser´a escolhido sem sorteio.
2.3. MATERIAIS E M ´ETODOS 13 A heur´ıstica termina de executar em uma das trˆes situa¸c˜oes: quando se esgotarem as unidades, quando todas as arestas j´a tiverem sido cobertas ou quando em, uma itera¸c˜ao, nenhuma nova unidade for inserida (em uma improv´avel situa¸c˜ao de todos os v´ertices j´a tiverem sido ocupados por uma unidade).
2.3.3
Busca Tabu
A busca tabu ´e uma meta-heur´ıstica baseada em busca local em que algumas al-tera¸c˜oes na resposta corrente s˜ao proibidas de serem realizadas por um certo n´umero de itera¸c˜oes. Estas altera¸c˜oes proibidas ficam armazenadas em uma estrutura cha-mada lista tabu, de onde vem o nome do algoritmo.
Nesta abordagem, inicializa-se o algoritmo com a heur´ıstica construtiva descrita na se¸c˜ao anterior. Ap´os isso, come¸ca-se a busca local.
A busca local que foi utilizada sorteia uma das unidades para trocar de lugar, indo para um dos n´os adjacentes ao n´o que ela est´a no momento. S˜ao testados todos os n´os adjacentes. O que obtiver a melhor resposta ´e escolhido para ser o destino da unidade (vide Algoritmo 1 ).
Algoritmo 1 Pseudoc´odigo da busca tabu. A busca local realizada no loopfor all
´e utilizada tamb´em no algoritmo simulated annealing 1: s∗ ← heuristicaConstrutiva()
2: s←s*
3: itSemM elhoras←0 4: objM elhor ←f(s∗)
5: while itSemM elhoras <2∗ |U| do 6: rem← sorteiaUnidade(s)
7: s′ ←s−rem
8: itSemM elhoras+ +
9: for all viz in vizinhos(rem) do
10: obj ← testaFuncObjetivoVizinho(s′, viz)
11: if (obj > objM elhor AND satifazTabu(s′,s∗,viz) ) OR melhorGeral(s′,
viz) then
12: melhorV izinho←viz 13: melhorObj ←obj
14: if satisfazTabu(s′, s∗, melhorV izinho) then
15: s′ ←s′+melhorV izinho
16: s←s′
17: if melhorGeral(s′,melhorV izinho)then
18: s∗ ←s′+melhorV izinho
19: itSemM elhoras←0
somando todos os tipos. A lista tabu foi ajustada tamb´em de acordo ao n´umero de unidades, tendo tamanho |U|.
Um detalhe importante ´e que, para a avalia¸c˜ao das respostas na busca tabu, a fun¸c˜ao objetivo ´e alterada de modo a penalizar solu¸c˜oes inv´alidas. Todas as arestas que n˜ao s˜ao cobertas, conforme a terceira restri¸c˜ao do modelo matem´atico exposto acima, tˆem seu lucro descontado da fun¸c˜ao objetivo. Sendo assim, em casos extremos, a fun¸c˜ao objetivo pode ter valor zero ou at´e mesmo negativo.
2.3.4
Simulated Annealing
O Simulated Annealing ´e uma meta-heur´ıstica que simula o processo de resfriamento de uma liga met´alica durante sua fabrica¸c˜ao. Neste processo, a temperatura tem que diminuir lentamente para uma melhor cristaliza¸c˜ao da estrutura.
Sendo assim, o simulated annealing ´e um algoritmo que efetua uma busca local e aceita a atualiza¸c˜ao das respostas correntes, mesmo que com solu¸c˜oes piores, de acordo com uma fun¸c˜ao de probabilidade, regulada por uma temperatura, que cai lentamente, diminuindo o valor calculado pela fun¸c˜ao de probabilidade.
A busca local que utilizamos na nossa abordagem ´e igual a descrita na busca tabu. Uma vez que uma unidade ´e sorteada, ela ir´a mudar do seu n´o atual para o n´o adjacente com melhor fun¸c˜ao objetivo.
Aqui tamb´em ´e adotada a penaliza¸c˜ao de respostas invi´aveis descritas na se¸c˜ao anterior.
Em rela¸c˜ao aos parˆametros do simulated annealing, foi adotado um crit´erio de parada baseado na temperatura m´ınima e no n´umero de itera¸c˜oes sem melhoras. Uma vez que a temperatura atingisse um m´ınimo de 0.01 ou o n´umero de itera¸c˜oes sem melhora atingisse um m´aximo de 2*|U|, o algoritmo se encerra. A temperatura inicial foi definida como 1 e o crit´erio de atualiza¸c˜ao desta foi de multiplicar o valor corrente por log2 1,99. Tais valores foram obtidos ap´os testes de calibra¸c˜ao.
2.4
Descri¸c˜
ao do experimento
Para a realiza¸c˜ao deste experimento foram utilizados os tra¸cados de quatro cidades distintas, duas fict´ıcias e duas reais. Entre as fict´ıcias temos uma que ´e um grafo de 674 arestas e 255 v´ertices (que ser´a chamada de Fic1) e outra um grafo de 481 v´ertices e 1428 arestas (que ser´a chamada de Fic2). J´a as cidades reais s˜ao Salinas-MG (que gerou um grafo de 980 v´ertices e 1475 arestas) e Vi¸cosa-Salinas-MG (que gerou um grafo de 1436 v´ertices e 1800 arestas) e que tˆem cerca de 40 mil e 70 mil habitantes, respectivamente (IBGE , 2010).
2.5. RESULTADOS E DISCUSS ˜AO 15 Foram testados, para cada uma dessas cidades, diferentes n´umeros de unidades policiais, assim como tamb´em de tipos de unidades policiais. Nas cidades artificiais, foram criadas algumas varia¸c˜oes aleat´orias quanto ao n´umero de contram˜aos e suas localiza¸c˜oes, como tamb´em o n´umero de ruas restritas para algum tipo de unidade (que nesse caso causaram a remo¸c˜ao da rua no momento de se calcular a cobertura da unidade). As configura¸c˜oes utilizadas possu´ıam policiais a p´e (com raio de alcance de 500 metros) ou de viatura (com raio de alcance de 1000 metros) e foi considerado, para fim de dimensionamento do efetivo, que cada unidade possu´ıa sempre um par de policiais.
No total foram geradas 18 instˆancias. Para cada uma delas, o modelo matem´atico foi resolvido utilizando o software de otimiza¸c˜ao inteira-mista Symphony (RALPHS; G ¨UZELSOY, 2005), com tempo m´aximo de duas horas. No caso das heur´ısticas, cada instˆancia foi resolvida 40 vezes, sendo recolhidos, a partir disso, os valores m´edios, variˆancias, m´aximos e m´ınimos dos tempos de execu¸c˜ao e valor de fun¸c˜ao objetivo obtidos.
Todos os testes foram realizados em um computador com processador Intel Core i5-3330 de 3.0 GHz, 8 GB de mem´oria RAM e sistema operacional Windows 7.
2.5
Resultados e Discuss˜
ao
O primeiro resultado analisado nos testes das instˆancias descritas anteriormente foi sobre a factibilidade destas. Foi observado que, embora as cidades artificiais permitissem um n´umero de unidades pequeno (pelo menos duas unidades a p´e e duas em viaturas), as reais eram mais exigentes em rela¸c˜ao ao tamanho do efetivo. Um primeiro ponto em rela¸c˜ao aos resultados exatos, ´e de que o tamanho da ci-dade, por si s´o, tem pouca influˆencia na “intratabilidade” do problema. O Symphony n˜ao conseguiu, por exemplo, encontrar a resposta para nenhuma das instˆancias de Fic2 no tempo de duas horas, mas encontrou para todas as instˆancias fact´ıveis Vi¸cosa em menos de uma hora e meia, mesmo esta ´ultima cidade tendo gerado um grafo com quase o triplo de v´ertices.
Em rela¸c˜ao `a qualidade das respostas encontradas pelo modelo, pode-se observar que, no caso de Fic1 (a menor de todas as cidades), a cobertura ´otima correspondia tamb´em a cobertura total de arestas do grafo. Entretanto, essa situa¸c˜ao s´o se verificou para instˆancias desta cidade.
Na Figura 1, pode-se ver como as unidades foram distribu´ıdas nas melhores solu¸c˜oes do modelo (nem sempre ´otimas) das cidades de Vi¸cosa e Salinas.
Figura 1 – Os triˆangulos azui representam as viaturas e os pontos vermelhos unida-des de policiais a p´e. As figuras 2(a), 2(b) e 2(c) ilustram as solu¸c˜oes na cidade de Vi¸cosa-MG e 2(d), 2(e) e 2(f) na cidade de Salinas-MG.
unidades a p´e mais a leste, norte e sudeste no caso da cidade de Salinas.
Em rela¸c˜ao a fun¸c˜ao objetivo, como exposto na Tabela 1, incrementos de uma unidade de cada tipo na cidade de Vi¸cosa geraram melhoras por volta de 5% apenas. Isso pode ser visto, tamb´em, atrav´es da compara¸c˜ao entre as figuras 2(b) e 2(c), que demonstram uma acumula¸c˜ao de unidades nas regi˜oes norte e nordeste da cidade, o que provavelmente n˜ao seria necess´ario numa situa¸c˜ao real.
A situa¸c˜ao descrita no par´agrafo anterior acontece, tamb´em, nas instˆancias da cidade de Salinas, mas em uma menor escala, pois nesta, os incrementos obtidos s˜ao maiores e a acumula¸c˜ao aparente de unidades em determinadas regi˜oes ´e menos sens´ıvel. Iniciando a an´alise dos resultados obtidos pelas heur´ısticas, a primeira coisa a se falar ´e sobre a eficiˆencia das respostas fornecidas pela heur´ıstica construtiva. Como esta serve de inicializa¸c˜ao para os outros algoritmos, considera-se importante que ela seja r´apida e traga j´a respostas razo´aveis.
2.5. RESULTADOS E DISCUSS ˜AO 17 para as instˆancias da cidade Fic1, os valores m´edios das respostas chegou a 60% do valor da solu¸c˜ao ´otima.
Partindo para o simulated annealing, observou-se que seu tempo de execu¸c˜ao m´edio ´e entre 20% a 100% maior que o tempo gasto pelo algoritmo construtivo para a mesma instˆancia, o que indica que, primeiramente, o algoritmo construtivo j´a entrega uma resposta pr´oxima ao melhor valor que o simulated annealing pode alcan¸car e que o primeiro limita razoavelmente o segundo em rela¸c˜ao do tempo de execu¸c˜ao.
Em um comparativo com a solu¸c˜ao ´otima, o simulated annealing entrega respos-tas m´edias entre 19% a 93% do valor da solu¸c˜ao ´otima, chegando a alcan¸c´a-la no melhor caso de v´arias instˆancias.
Tabela 1 – Comparativo entre os resultados da solu¸c˜ao do modelo matem´atico e do algoritmo construtivo. Os valores em destaque indicam valores n˜ao ´otimos, obtidos ao fim de duas horas. Na descri¸c˜ao das instˆancias est´a explicito o n´umero de viaturas (Viat.) e unidades a p´e (Ped.) em cada
Instˆancia
ID
Exato Construtivo
Solu¸c˜ao Tempo (s)
Solu¸c˜ao m´edia
Desvio padr˜ao
Tempo m´edio
(s)
Desvio padr˜ao
Salinas 1(3 Viat. 3 Ped.) 1 10631 424 -4069.97 2350.79 0.38 0.49 Salinas 2(4 Viat. 4 Ped.) 2 11302 4880 -4076.00 1655.52 0.60 0.50 Salinas 3(5 Viat. 5 Ped.) 3 11596 541 -3392.72 1583.20 0.90 0.30 Vi¸cosa 1(6 Viat. 6 Ped.) 4 12546 1666 -3408.90 526.22 1.80 0.41 Vi¸cosa 2(7 Viat. 7 Ped.) 5 13381 1114 -3292.32 534.19 2.30 0.46 Vi¸cosa 3(8 Viat. 8 Ped.) 6 13877 4071 -3079.60 652.14 3.05 0.22 Fic1 c1 (2 Viat. 2 Ped.) 7 1820 18 1050.00 43.08 0.03 0.16 Fic1 c2 (2 Viat. 2 Ped.) 8 1820 10 1050.55 80.30 0.03 0.16 Fic1 c3 (2 Viat. 2 Ped.) 9 1820 18 1119.43 81.04 0.03 0.16 Fic1 c1 (4 Viat. 4 Ped.) 10 1820 21 1130.47 70.26 0.18 0.38 Fic1 c2 (4 Viat. 4 Ped.) 11 1820 21 1159.65 27.65 0.18 0.38 Fic1 c3 (4 Viat. 4 Ped.) 12 1820 21 1164.03 34.42 0.13 0.33
Fic2 c1 (3 Viat. 3 Ped.) 13 - 7243 54.55 383.13 0.20 0.41
Fic2 c2 (3 Viat. 3 Ped.) 14 - 7281 91.55 456.47 0.25 0.44
Fic2 c3 (3 Viat. 3 Ped.) 15 - 7255 -78.70 271.91 0.13 0.33
Fic2 c1 (5 Viat. 5 Ped.) 16 - 7279 265.08 303.21 0.43 0.50
Fic2 c2 (5 Viat. 5 Ped.) 17 - 7317 115.33 272.91 0.43 0.50
Fic2 c3 (5 Viat. 5 Ped.) 18 - 7266 289.03 331.37 0.43 0.50
Por fim, como podemos ver na Tabela 2, em dezessete das dezoito instˆancias, a resposta obtida pela busca tabu foi melhor do que a obtida pelo simulated annealing. Em compara¸c˜ao com a resolu¸c˜ao exata, observou-se, tamb´em, que as respostas obtidas pela busca tabu chegam em m´edia a no m´ınimo 65% do valor ´otimo da fun¸c˜ao objetivo na metade dos casos onde a solu¸c˜ao ´otima foi encontrada, contra apenas 48% do simulated annealing.
A busca tabu alcan¸ca esses valores em m´edia na metade do tempo da resolu¸c˜ao exata nas instˆancias de Fic 2 e em um ter¸co do tempo da resolu¸c˜ao exata nas instˆancias de Vi¸cosa. Em uma das instˆancias da cidade de Salinas gastou um tempo 60 vezes inferior para encontrar uma resposta com 28% do valor ´otimo.
2
.5
.
R
E
S
UL
T
AD
O
S
E
D
IS
C
US
S
˜AO
19
Tabela 2 – Comparativo entre o desempenho das heur´ısticas simulated annealing e busca tabu. Em negrito, a maior resposta m´edia e com o fundo destacado, a maior resposta individual. Lista de siglas: Rs – Resposta m´edia do simulated annealing; Rt – Resposta m´edia da busca tabu; UbR Melhor resposta;σ(R) – Desvio padr˜ao da resposta; T – Tempo m´edio; σ(T) – Desvio padr˜ao do tempo
Simulated Annealing Busca Tabu
ID Rs UbR σ(R) Ts σ(T) Rt UbR σ(R) Tt σ(T) Rt/Rs Tt/Ts
1 2030.3 8223 4429.8 44.3 30.1 4735.7 9169 3996.1 70.1 35.0 2.3 1.6
2 2920.3 9169 3642.6 70.3 48.3 3192.7 9195 4082.5 78.4 55.6 1.1 1.1
3 2354.9 9169 4274.4 91.7 69.6 2603.7 9146 3722.7 93.3 73.4 1.1 1.0
4 6010.3 8369 1645.1 189.7 42.1 8319.0 11685 1874.6 189.7 42.1 1.4 1.0
5 6211.5 8274 2304.6 237.5 58.8 8922.4 12160 2078.1 319.4 88.5 1.4 1.3
6 9890.8 12550 1920.6 330.1 45.2 9514.0 12274 2065.5 410.5 137.9 1.1 1.2
7 1706.9 1820 185.3 3.4 0.9 1773.8 1820 112.7 4.3 1.1 1.0 1.3
8 1654.4 1820 214.0 3.2 1.2 1793.5 1820 101.1 3.9 0.9 1.1 1.2
9 1644.8 1820 222.5 3.1 1.1 1770.5 1820 130.4 4.0 1.3 1.1 1.3
10 1684.0 1820 166.4 7.6 2.6 1779.1 1820 101.1 10.0 2.6 1.1 1.3
11 1657.2 1820 186.0 7.5 2.9 1763.9 1820 126.7 9.6 2.5 1.1 1.3
12 1625.2 1820 218.5 6.6 2.6 1807.9 1820 48.5 10.3 2.0 1.1 1.5
13 2954.6 3917 666.3 17.5 7.3 3288.0 3925 925.4 25.3 10.3 1.1 1.4
14 2862.2 3893 778.5 16.5 7.5 3555.0 3928 538.5 22.9 6.4 1.2 1.4
15 2697.7 3850 807.9 15.5 7.6 3289.1 3928 927.6 23.0 9.9 1.2 1.5
16 2885.3 3925 658.3 32.0 14.9 3640.2 3939 423.2 46.3 12.9 1.3 1.4
17 3855.0 3939 95.6 72.3 9.3 3895.1 3939 53.4 77.4 9.5 1.0 1.1
Um ´ultimo aspecto n˜ao abordado em torno do desempenho das heur´ısticas ´e o efeito da penaliza¸c˜ao a respostas infact´ıveis. As penaliza¸c˜oes em alguns casos foram grandes o suficiente para deixar a fun¸c˜ao objetivo negativa. Foi o que aconteceu com o m´etodo construtivo, onde para muitas instˆancias, a m´edia das respostas ficou negativa e o pior caso teve quase 80% das arestas penalizadas e n˜ao contribuindo para a fun¸c˜ao objetivo. No simulated annealing e na busca tabu, as m´edias j´a foram todas positivas, mas ainda houve piores casos com valores de fun¸c˜ao objetivo negativo. Em uma vis˜ao geral, os testes acabaram mostrando que a obten¸c˜ao de uma resposta vi´avel com os m´etodos heur´ısticos, utilizando esta forma de penaliza¸c˜ao, n˜ao acontece sempre.
2.6
Conclus˜
ao
Neste trabalho foi avaliada a eficiˆencia de uma heur´ıstica construtiva e duas outras estrat´egias heur´ısticas baseadas em metaheur´ısticas na resolu¸c˜ao do problema de posicionamento de unidades policiais. Pelo que foi mostrado na se¸c˜ao anterior, viu-se que o deviu-sempenho da busca tabu viu-se mostrou superior ao simulated annealing. Entretanto, o alto valor dos desvios padr˜ao das respostas indica que ainda se pode melhorar a qualidade dos resultados.
Outro ponto interessante ´e que existe coincidˆencia na aloca¸c˜ao de uma unidade para certos pontos ou regi˜ao em v´arias instˆancias da mesma cidade, na solu¸c˜ao ´otima.
Viu-se ainda que, para as instˆancias testadas, o tamanho das cidades n˜ao ´e diretamente proporcional ao tempo gasto para se encontrar a solu¸c˜ao ´otima para esta cidade. Em cidades de mais de 100 mil habitantes talvez essa situa¸c˜ao mude, mas isso ainda n˜ao foi verificado experimentalmente.
21
3 Heur´ıstica baseada em busca tabu para
o posicionamento de unidades policiais
1
Abstract Public safety is one of most demanding areas in pu-blic administration, having direct consequences on people welfare. Creating crime containment strategies or providing a fast answer to emergency situations when they occurs is a challenge. In this paper, we use Operations Research techniques to solve a police units positioning problem, in order to maximize the profit associa-ted with police coverage in a city. We propose a model to describe the problem, heuristic methods based on Tabu Search and a penalty function for infeasible solutions. The tests are performed using ins-tances with real street network of three different cities. The results show the efficacy of the penalty method, increasing the number of feasible solutions found, the good quality of the solutions genera-ted by the Tabu Search, and a low convergence time, even for large instances.
3.1
Introdu¸c˜
ao
A quest˜ao da seguran¸ca p´ublica ´e um dos pontos chave de qualquer pol´ıtica de bem estar social. ´E dif´ıcil pensar em qualidade de vida para a popula¸c˜ao sem que essa tenha seguran¸ca, principalmente nas ´areas urbanas, onde os n´ıveis de criminalidade costumam causar maiores preocupa¸c˜oes do que em ambientes rurais.
No Brasil, em especial, o problema da seguran¸ca p´ublica ´e motivo de preocupa¸c˜ao h´a bastante tempo, por conta dos altos e crescentes ´ındices de criminalidade. Por exemplo, em (WAISELFISZ, 2013) ´e mostrado que a taxa de homic´ıdios por 100 mil habitantes subiu de 11,7 em 1980 para um pico de 28,9 em 2003, e chegando a 27,1 em 2011. Com estes n´umeros, o Brasil se destaca como um dos pa´ıses mais violentos do mundo (CERQUEIRA, 2005).
Uma das medidas necess´arias para reverter essa situa¸c˜ao ´e criar um policiamento preventivo e responsivo eficiente, visando evitar que crimes sejam executados, e quando forem, agilizar o atendimento `as v´ıtimas e iniciar rapidamente a busca dos criminosos.
1 Neste cap´ıtulo est´a inclu´ıdo uma vers˜ao corrigida do artigoM´etodos para o problema de
Entretanto, as t´aticas de policiamento s˜ao criadas tradicionalmente com base apenas na experiˆencia dos agentes policiais, por percep¸c˜oes pessoais ou coletivas, muitas vezes sem base cient´ıfica. Por´em, esta pr´atica pode mostrar-se ineficiente, por diversos fatores, tais como: ´areas de grande tamanho, distribui¸c˜oes pouco ´obvias de ocorrˆencias policiais ou mesmo inabilidade dos policiais para criar boas t´aticas.
Com o intuito de melhorar a tarefa de criar t´aticas de policiamento, uma das op¸c˜oes ´e servir a pol´ıcia de ferramentas computacionais para melhorar sua presta¸c˜ao de servi¸co e modelos integrados de gest˜ao da seguran¸ca p´ublica. Essa tendˆencia j´a vem sendo observada desde os anos 70 nos Estados Unidos, Canad´a e Europa (CERQUEIRA, 2005); por´em, ´e ainda incipiente no Brasil.
Neste trabalho, a tem´atica de cria¸c˜ao de m´etodos computacionais para melhoria dos servi¸cos policiais ser´a abordada do ponto de vista da Pesquisa Operacional. Mais especificamente pelo uso de programa¸c˜ao linear inteira e metaheur´ısticas, tentar-se-´a resolver o problema de posicionamento de unidades policiais em um meio urbano.
Este problema parte das premissas de que: (1) s˜ao necess´arios trˆes fatores para a ocorrˆencia de um crime (um ofensor motivado, um alvo dispon´ıvel e ausˆencia de um agente repressor (COHEN; FELSON, 1979)) e (2) uma vez que haja policiais pr´oximos de uma certa localidade, estes fazem sua presen¸ca ser sentida por um eventual infrator. Desta maneira, para se diminuir a quantidade de crimes que acontecem em um certo local, ´e preciso fazer com que haja uma cobertura deste por policiais posicionados a uma distˆancia razo´avel de qualquer ponto.
Deste modo, dada uma quantidade pr´e-definida de policiais, cada um com um raio de a¸c˜ao limitado e dependente basicamente da forma que usam para se loco-mover (viaturas, bicicletas, a p´e, etc. . . ), se deve encontrar a melhor maneira de posicionar estes policiais, de tal forma que unidas as suas ´areas de a¸c˜ao, tenhamos uma cobertura com um m´aximo lucro associado. Trabalha-se ainda com a restri¸c˜ao de que, dobrando-se o raio de a¸c˜ao das unidades, todas as ruas da ´area investigada devem ser cobertas.
3.2. REFERENCIAL TE ´ORICO 23
3.2
Referencial Te´
orico
Problemas relacionados `a manuten¸c˜ao da seguran¸ca p´ublica s˜ao tratados na Pes-quisa Operacional desde o in´ıcio dos anos 70 (SU; FU; LIU, 2010), com modelos simples e determin´ısticos, visando basicamente responder perguntas como quantos policiais seriam necess´arios para patrulhar uma determinada ´area. No estado atual, as abordagens s˜ao bastante diversificadas e os problemas s˜ao descritos de forma de-termin´ıstica ou estoc´astica, atrav´es de modelos de cobertura (no caso de aloca¸c˜ao de viaturas ou recursos), roteamento (para patrulhamento preventivo), dimensiona-mento de efetivo, ou modelos de filas (para estrat´egias de atendidimensiona-mento de chamadas de servi¸co).
Um dos trabalhos pioneiros foi oPatrol Car Allocation Model (PCAM), proposto por Chaiken em 1975 (CHAIKEN, 1975) e que tinha por fim auxiliar o dimensiona-mento de tropas policiais. Sobre esse trabalho, ainda nos anos 80, Saladin (SALA-DIN, 1982a) elaborou um modelo de goal programming que utilizava as simula¸c˜oes do PCAM como uma das fases de sua an´alise.
A partir da´ı, uma vasta gama de abordagens foi utilizada. Grande parte delas se apoia no conceito de hot spot, ou zonas quentes, que s˜ao ´areas com um maior ´ındice hist´orico de ocorrˆencias de crimes ou chamadas de servi¸co. Por exemplo, Chawathe (CHAWATHE, 2007) utiliza oshot spots para guiar a constru¸c˜ao de rotas de patrulhamento. Ao modelar-se a cidade como um grafo, onde cada rua (aresta) tem um peso (ou lucro) e um comprimento, procura-se encontrar o caminho fechado mais denso com k arestas e o menor caminho mais denso com k arestas, onde a densidade ´e medida pela raz˜ao entre peso e comprimento das ruas. J´a em Li et. al. (LI et al., 2011), partindo-se do principio que rotas fixas s˜ao ineficientes, tenta-se criar rotas de patrulhamento tamb´em guiadas pela localiza¸c˜ao doshot spot. Por fim, fugindo do conceito de hot spot, mas ainda tratando de problemas de roteamento, temos o trabalho de Takamiya e Watanabe (TAKAMIYA; WATANABE, 2011), que se baseia em uma vers˜ao do problema de Roteamento Peri´odico Capacitado por Arcos para montar suas rotas de patrulhamento.
em agentes e Amico et. al. (D’AMICO et al., 2002a) que utiliza um algoritmo baseado em Simulated Annealing e o PCAM, buscando criar uma divis˜ao eficiente em distritos da cidade de Buffalo, New York.
Em dois trabalhos, (GURGEL; FERREIRA; ALOISE, 2010) e (KESKIN et al., 2012a), ´e feita uma abordagem que mistura a maximiza¸c˜ao da cobertura e da eficiˆencia das rotas de patrulhamento. No primeiro trabalho, ´e feita uma com-para¸c˜ao entre dois modelos (um sendo uma variante do modelo de caixeiro viajante e outro do problema de p-medianas) atrav´es de dados reais da cidade de Natal. No segundo, o foco ´e o patrulhamento de trˆansito visando diminuir a ocorrˆencia de aci-dentes. Atrav´es novamente do uso do conceito de hot spot, tenta-se fazer com que as viaturas se desloquem e permane¸cam nas zonas mais perigosas durante o per´ıodo do dia em que elas apresentam um maior risco, se assemelhando a uma estrat´egia deteam orienteering problem with time window (TOPTW).
Os trabalhos mais recentes vˆem se concentrando principalmente em modelagens estoc´asticas (SU; FU; LIU, 2010), (LAU et al., 2010a), (PAL et al., 2012), sendo que esse ´ultimo utiliza um interessante modelo de fuzzy goal programming em um problema de patrulhamento do trˆansito. Em (RUAN et al., 2005a) um processo de decis˜ao de Markov ´e usado para modelar rotas de patrulhamento. Outra vasta ´area de investiga¸c˜ao, j´a um pouco mais afastada da Pesquisa Operacional ´e a modelagem multi-agente, da qual citamos dois trabalhos brasileiros, o de Melo, Furtado e Coelho (MELO; FURTADO; COELHO, 2007) e o de Vasconcelos (VASCONCELOS, 2008).
Pode-se destacar ainda alguns softwares, listados por Can¸cado (CANC¸ ADO, 2005), que fazem uso de bancos de dados e sistemas de informa¸c˜oes geogr´aficas para apoiar o registro de eventos e sua an´alise. Entre eles, temos o sistema ReCap (BROWN, 1998), que une t´ecnicas de data mining e fus˜ao de dados para an´alises criminol´ogicas; o ExpertCop (FURTADO; VASCONCELOS, 2004), que serve de treinamento para policiamento preventivo; o COPLINK (CHEN et al., 2003), que permite, por exemplo, a liga¸c˜ao entre informa¸c˜oes para aux´ılio em investiga¸c˜oes; e o software de referenciamento, desenvolvido na Universidade Federal de Minas Gerais (UFMG), que utiliza dados de ocorrˆencias policiais para gerar visualiza¸c˜oes de estat´ısticas sobre a criminalidade (LESTE, 2014).
Cabe salientar que os problemas acima est˜ao inseridos em um conjunto maior que engloba outros problemas de resposta a emergˆencias, tais como atendimento m´edico de emergˆencia e conten¸c˜ao de incˆendios.
3.2. REFERENCIAL TE ´ORICO 25 distˆancia em que os solicitantes est˜ao dos prestadores de servi¸co, quanto a forma utilizada para a locomo¸c˜ao, s˜ao relevantes.
Tal proximidade gera trabalhos tratando problemas parecidos com os que foram citados anteriormente. Em (BROTCORNE; LAPORTE; SEMET, 2003) s˜ao lista-dos modelos que lidam com aloca¸c˜ao e realoca¸c˜ao de ambulˆancias em ´areas urbanas. Posteriormente, a publica¸c˜ao desta listagem, em (SCHMID; DOERNER, 2010) se prop˜oe um modelo de aloca¸c˜ao e realoca¸c˜ao de ambulˆancias visando maximizar a co-bertura com refor¸co. Nesta, s˜ao consideradas as varia¸c˜oes de tr´afego, capacidade de cobertura com refor¸co e capacidade das ambulˆancias, em uma abordagem que pode-ria ser adaptada para a t´atica de patrulhamento com viaturas. Em outros trabalhos, o foco est´a nos modelos de fila, baseados no hypercube queuing model, como o pro-posto por Rajagopalan, Saydam e Xiao (RAJAGOPALAN; SAYDAM; XIAO, 2008), um n˜ao-linear de set covering que leva em considera¸c˜ao as varia¸c˜oes de pedidos de atendimento durante o dia, ou o de Budge, Ingolfsson e Erkut (BUDGE; INGOLFS-SON; ERKUT, 2009a) em que se tenta melhorar o servi¸co de envio de ambulˆancias para o atendimento das chamadas e tamb´em o de Takeda, Widmer e Morabito (TA-KEDA; WIDMER; MORABITO, 2007) onde ´e feita uma an´alise sobre a eficiˆencia da descentraliza¸c˜ao de servi¸cos de emergˆencia utilizando ohyperqueuing model. Ou-tros trabalhos (BERALDI; BRUNI; CONFORTI, 2004) (BERALDI; BRUNI, 2009) utilizam modelos de programa¸c˜ao estoc´astica para descrever servi¸cos de emergˆencia.
Entretanto, as diferen¸cas entre estes universos s˜ao grandes o suficiente para im-pedir a direta implementa¸c˜ao de solu¸c˜oes encontradas em um deles nos outros. A presta¸c˜ao de servi¸cos policiais n˜ao tem uma caracter´ıstica predominantemente res-ponsiva como o servi¸co de atendimento m´edico de urgˆencia ou combate a incˆendios. Parte do trabalho policial ´e preventivo, com base no patrulhamento das ruas, identi-fica¸c˜ao de ´areas de risco ou infratores em potencial e at´e mesmo a¸c˜oes educativas de dire¸c˜ao segura ou combate ao uso de entorpecentes, entre outros. Embora m´edicos e bombeiros tamb´em promovam a¸c˜oes preventivas, elas tˆem uma natureza e resultados distintos da preven¸c˜ao ao crime. Por exemplo, uma viatura policial passando por uma determinada regi˜ao pode evitar que um delito ocorra (evitando uma solicita¸c˜ao de servi¸co) ou que um criminoso tenha ˆexito na sua a¸c˜ao. Por´em, uma ambulˆancia fazendo o mesmo n˜ao impede que uma pessoa sofra um infarto ou um AVC.
Outro ponto ´e a mobilidade dos recursos policiais. Em uma chamada para uma ocorrˆencia de grandes propor¸c˜oes, ´e bem mais f´acil um batalh˜ao mover armas, ho-mens e viaturas para o local do que um hospital mover seu instrumental e estrutura.
3.3
Materiais e m´etodos
Nesta se¸c˜ao, s˜ao apresentados o modelo matem´atico utilizado para descrever o pro-blema formalmente, as heur´ısticas propostas para resolvˆe-lo e o m´etodo de pena-liza¸c˜ao de respostas invi´aveis usado para fazer com que as heur´ısticas gerem respos-tas vi´aveis.
Para todos os m´etodos testados, foram utilizadas cidades reais modeladas como um grafo G = (V, E) ponderado e direcionado, tal que dois n´os (cruzamentos) v, w ∈ V que s˜ao adjacentes sempre s˜ao unidos por duas arestas e1, e2 ∈ E (ruas), uma indo de v para w e outro fazendo o sentido contr´ario. Cada rua r ∈E possui um lucro lr associado a sua cobertura por unidades policiais e um comprimento dr
(distˆancia entre seus cruzamentos limitantes). A partir disto, ´e calculado o tempo necess´ario para cada tipo de unidade ir de um ponto ao outro da cidade. Uma vez que a via seja de m˜ao ´unica, considera-se um acr´escimo de 50% no tempo necess´ario para percorrer o trecho no sentido da contram˜ao para todos os ve´ıculos motorizados, visando simular a dificuldade dessas unidades para percorrer o trecho. Al´em disso, algumas arestas representam ruas que n˜ao podem ser transitadas atrav´es de ve´ıculos motorizados. Para model´a-las, foi considerado que o tempo necess´ario para percorrˆe-las utilizando ve´ıculos motorizados ´e infinito.
Para cada cidade, a entrada cont´em ainda um conjunto U de unidades policiais dispon´ıveis. Cada unidade possui um tipo i∈Q(tal que Q´e o conjunto de todos os tipos de unidades), que define as condi¸c˜oes de mobilidade desta (motorizada, h´abil a percorrer vias estreitas ou irregulares). Para cada um desses tipos, ´e definida tamb´em a quantidade Ui de unidades dispon´ıveis.
Para se dizer que uma unidade alocada em uma esquina v cobre uma rua r, ´e definido um tempo limite TM AX para sair de v e chegar a uma das esquinas de
r. ´E considerando ainda as corre¸c˜oes de tempo tais como tratadas nos par´agrafos anteriores. Sendo assim, para cada tipo de unidade i ∈ Q e trecho de rua r ∈ E e cruzamento j ∈ V, s˜ao definidos os valores bin´arios prji e p′rji, que valem 1 se uma
unidade do tipo i localizada em j consegue chegar (cobrir) ao trecho r em tempo TM AX e 2TM AX respectivamente, e 0 caso contr´ario. O tempo TM AX ´e usado para
definir cobertura e 2TM AX como garantia m´ınima de proximidade.
3.3.1
Modelo matem´
atico
3.3. MATERIAIS E M ´ETODOS 27 facilidades com diferentes alcances e se difere do descrito em (FARAHANI et al., 2012) pelo fato das gradua¸c˜oes serem consideradas nas restri¸c˜oes e n˜ao na fun¸c˜ao objetivo.
Neste modelo, assume-se que cada rua (trecho de via urbana compreendido entre dois cruzamentos) possui um comprimento, um sentido de movimenta¸c˜ao, restri¸c˜oes de passagens de certos tipos de ve´ıculos e uma importˆancia (ou lucro) associado a necessidade de ser coberta por uma unidade policial. O tempo para percorrer as ruas leva em considera¸c˜ao a velocidade m´edia que pode ser obtida em uma via, o sentido que a unidade est´a trafegando (m˜ao, contram˜ao), o tipo de unidade (unidades sens´ıveis a contram˜ao, como carros e motos, ou insens´ıveis, como unidades a p´e) e o comprimento da rua. Todas essas informa¸c˜oes j´a s˜ao disponibilizadas nas instˆancias, exceto a corre¸c˜ao do tempo necess´ario para percorrer uma via em contram˜ao, que ´e corrigido no processamento dos dados para os tipos de unidades sens´ıveis a essa restri¸c˜ao.
Para constru¸c˜ao do modelo s˜ao usadas as seguintes vari´aveis de decis˜ao:
• xij: vari´avel que indica a quantidade de unidades do tipoialocadas no v´ertice
j
• ar: vari´avel bin´aria igual a 1 se o trecho de ruar´e coberto por alguma unidade
policial dentro do tempo TM AX
• a′r: similar a anterior, mas com tempo 2TM AX
O dito modelo ´e mostrado abaixo:
maxZ =X
r∈E
lrar (3.1)
X
j∈V
xij ≤Ui, ∀i∈Q (3.2)
ar ≤
X
i∈Q
X
j∈V
prjixij ∀r ∈E (3.3)
a′r ≤X
i∈Q
X
j∈V
p′rjixij ∀r ∈E (3.4)
X
r∈E
a′r =|E| (3.5)
xij ∈Z
+
, ∀i∈U, j ∈V (3.6)
ar ∈ {0,1}, ∀r ∈E (3.7)
a′r ∈ {0,1}, ∀r ∈E (3.8)