UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
E DECOMPUTAÇÃO
Implementação Experimental de Filtro Ativo
Paralelo de Potência com Aplicação a Gerador
de Indução Trifásico
Paulo Vitor Silva
Orientador: Prof. Dr. Ricardo Ferreira Pinheiro Co-orientador: Prof. Dr. Andrés Ortiz Salazar
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências em Engenharia Elétrica.
Silva, Paulo Vitor.
Implementação experimental de filtro ativo paralelo de potência com apli-cação a gerador de indução trifásico / Paulo Vitor Silva. - Natal, RN, 2010.
61 f.
Orientador: Ricardo Ferreira Pinheiro. Co-orientador: Andrés Ortiz Salazar.
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e de Computação.
1. Gerador de indução Dissertação. 2. Filtro ativo paralelo de potência -Dissertação. 3. Potências instantâneas - -Dissertação. 4. DSP - -Dissertação. I. Pinheiro, Ricardo Ferreira. II. Salazar, Andrés Ortiz. III. Universidade Federal do Rio Grande do Norte. IV. Título.
Paralelo de Potência com Aplicação a Gerador
de Indução Trifásico
Paulo Vitor Silva
Dissertação de Mestrado aprovada em 28 de junho de 2010 pela banca examinadora com-posta pelos seguintes membros:
Prof. Dr. Ricardo Ferreira Pinheiro (orientador) . . . DCA/UFRN
Prof. Dr. Andrés Ortiz Salazar (co-orientador) . . . DCA/UFRN
Prof. Dr. Fernando Luiz Marcelo Antunes . . . DEE/UFC
À Deus, por permitir que esse momento tão importante acontecesse em minha vida. Aos meus pais Hermano e Auristela e aos meus irmãos Priscilla e Pablo, que sempre estiveram do meu lado não só na realização deste trabalho, mas em todos os momentos da minha vida.
À minha namorada Fernanda, por todo apoio, carinho e compreensão.
Aos Professores Ricardo Ferreira Pinheiro e Andrés Ortiz Salazar, pelos ensinamentos e orientações acadêmicas.
A todos os meus familiares e amigos, que me incetivaram e me apoiaram nessa etapa de minha vida.
Aos amigos companheiros do PPGEEC que me ajudaram sempre que precisei, em espe-cial, à Valci Victor, Luciano Júnior, Marcos Milfont e Jefferson Dolan que me transmiti-ram seus conhecimentos e experiências profissionais durante este período.
Este trabalho descreve a implementação experimental de um filtro ativo paralelo de potência aplicado a um gerador de indução trifásico. A estratégia de controle do filtro ativo voltou-se para o controle de excitação da máquina e para a minimização dos har-mônicos na corrente de saída do gerador. Envolveu a implementação de um chaveamento PWM digital, tendo sido realizada a comparação de duas técnicas para obtenção das cor-rentes de referência.
A primeira técnica se baseia no método referencial síncrono dq e a segunda na teoria das potências instantâneas. A comparação é realizada via simulação e resultados experi-mentais.
Para obtenção dos resultados experimentais, foi montada uma bancada experimental e o controle e comunicações necessárias foram implementados utilizandose um DSP -TMS320F2812.
Os resultados de simulação e experimentais obtidos comprovaram a eficiência do filtro para a aplicação, com destaque para a técnica das potências instantâneas.
Palavras-chave: Gerador de Indução, Filtro Ativo Paralelo de Potência, Potências
This work describes the experimental implementation of a shunt active power filter applied to a three-phase induction generator. The control strategy of active filter turned to the excitation control of the machine and to decrease the harmonics in the generator output current. Involved the implementation of a digital PWM switching, and was made a comparison of two techniques for obtaining the reference currents.
The first technique is based on the synchronous dq reference method and the second on the theory of instantaneous power. The comparison is performed via simulation and experimental results.
To obtain the experimental results, was mounted a bench trial and the control and communications needed were implemented using DSP - TMS320F2812.
The simulation results and experimental data proved the efficiency of the filter to apply, highlighting the technique of instantaneous power.
Keywords: Induction Generator, Shunt Active Power Filter, Instantaneous Power,
Sumário i
Lista de Figuras iii
Lista de Tabelas v
Lista de Símbolos e Abreviaturas vii
1 Introdução 1
1.1 Considerações Preliminares . . . 1
1.1.1 Demanda de Energia . . . 1
1.2 Revisão Bibliográfica . . . 3
1.2.1 Topologias de Aerogeradores . . . 3
1.2.2 Filtros Ativos de Potência . . . 5
1.2.3 Harmônicos na Rede . . . 9
1.3 Conclusão . . . 10
2 Fundamentação Teórica 11 2.1 Teoria de Máquinas . . . 11
2.2 Teoria Generalizada das Potências Instantâneas . . . 12
2.2.1 Introdução . . . 12
2.2.2 Modelagem . . . 12
2.3 Método de Sincronismo . . . 14
2.4 Estratégias para a Determinação das Correntes de Referência . . . 15
2.4.1 Referências de corrente através de Referencial Síncrono dq . . . . 16
2.4.2 Referências de corrente através das Potências Instantâneas . . . . 16
2.5 Conclusão . . . 16
3 Projeto Experimental 19 3.1 Estrutura Laboratorial . . . 19
3.1.1 Motor CC . . . 19
3.1.2 Gerador de Indução . . . 19
3.1.3 Capacitor de Compensação . . . 20
3.1.4 Bloco dos Sensores . . . 22
3.1.5 Interface de Comando dos Pulsos . . . 22
3.2.1 DSP - TMS320F2812 . . . 24
3.2.2 Algoritmo Implementado - Diagramas de Blocos . . . 28
3.3 Esquema Geral de Montagem . . . 29
3.4 Conclusão . . . 31
4 Resultados 33 4.1 Resultados de Simulações . . . 33
4.1.1 Referencial Síncrono dq . . . 35
4.1.2 Referencial pelas Potências Instantâneas . . . 37
4.2 Resultados Experimentais . . . 43
4.2.1 Referencial Síncrono dq . . . 45
4.2.2 Referencial pelas Potências Instantâneas . . . 47
4.3 Conclusão . . . 49
5 Conclusão e Sugestões para Trabalhos Futuros 51 5.1 Conclusão . . . 51
5.2 Sugestões para Trabalhos Futuros . . . 51
Referências bibliográficas 53 A Esquemáticos 59 A.1 Sensor de Tensão ca . . . 59
A.2 Sensor de Tensão cc . . . 59
1.1 Gerador de Indução - Gaiola de Esquilo . . . 4
1.2 Gerador Síncrono . . . 4
1.3 DFIG . . . 5
1.4 Filtro Ativo de Potência Paralelo . . . 6
1.5 Filtro Ativo de Potência Série . . . 7
1.6 Filtro Ativo de Potência Híbrido . . . 7
1.7 Filtro Ativo de Potência Universal . . . 8
2.1 Transformação 123 para dq. . . 12
2.2 Diagrama de Cálculo das Potências Instantâneas. . . 13
2.3 Seno e cosseno obtidos a partir do uso do método de sincronização proposto. 15 2.4 Diagrama para obtenção das correntes de referência - Técnica 1. . . 16
2.5 Diagrama para obtenção das correntes de referência - Técnica 2. . . 17
3.1 Máquina CC. . . 20
3.2 Máquina de Indução de rotor bobinado. . . 20
3.3 Conjunto: Motor CC + Gerador de Indução. . . 21
3.4 Capacitor de Compensação. . . 21
3.5 Bloco de Sensores. . . 22
3.6 Placa de Condicionamento dos Pulsos PWM. . . 23
3.7 Placa de Condicionamento conectada aos Drivers. . . 23
3.8 Inversor. . . 25
3.9 Indutor de Acoplamento. . . 25
3.10 Carga não-linear. . . 26
3.11 DSP TMS320F2812 . . . 26
3.12 Visão Geral do Módulo . . . 27
3.13 Leituras de Sinais via DSP . . . 28
3.14 Representação do algoritmo implementado - Técnica 1 . . . 28
3.15 Representação do algoritmo implementado - Técnica 2 . . . 30
3.16 Visão Geral do Sistema . . . 30
3.17 Quadro - acionamento. . . 31
3.18 Visão Geral do Sistema. . . 32
4.1 Tensão trifásicas da rede. . . 33
4.2 Corrente de Carga - Fase A. . . 34
4.3 Espectro de Freqüências - Corrente de Carga. . . 34
4.7 Espectro de Freqüências - Corrente da Fonte - Fase A. . . 36
4.8 Tensão no Barramento cc . . . 36
4.9 Corrente da Fonte / Corrente de Carga . . . 37
4.10 Tensão da Fonte / Corrente da Fonte . . . 37
4.11 Diagrama para obtenção das correntes de referência - Técnica 2. . . 38
4.12 Potência Ativa Instantânea . . . 38
4.13 Potência Reativa Instantânea . . . 38
4.14 Potência Ativa Oscilante . . . 39
4.15 Potência Ativa Real . . . 39
4.16 Corrente do Filtro - Fase A . . . 39
4.17 Corrente da Fonte - Fase A - Parcela reativa . . . 40
4.18 Corrente da Fonte - Fase A - Parcela ativa oscilante . . . 40
4.19 Corrente da Fonte - Fase A . . . 41
4.20 Espectro de Freqüências - Corrente da Fonte - Fase A . . . 41
4.21 Tensão no Barramento cc . . . 42
4.22 Corrente da Fonte / Corrente da carga . . . 42
4.23 Tensão da Fonte / Corrente da Fonte . . . 42
4.24 Tensões trifásicas de entrada. . . 43
4.25 Correntes da Carga não-linear. . . 43
4.26 Espectro de Freqüências - Corrente de Carga. . . 44
4.27 Tensão e Corrente da fonte - Fase A. . . 44
4.28 Tensão da Fonte / Corrente da Fonte / Corrente de Carga. . . 44
4.29 Tensão e Corrente da Fonte - Fase A. . . 45
4.30 Tensão da Fonte / Corrente da Fonte / Corrente de Carga - Fase A. . . 45
4.31 Corrente do Filtro - Via DSP. . . 46
4.32 Espectro de Freqüências - Corrente da Fonte - Técnica 1. . . 46
4.33 Tensão da Fonte e Corrente da Fonte - Fase A. . . 47
4.34 Tensão da Fonte / Corrente da Fonte / Corrente de Carga - Fase A. . . 47
4.35 Aspectro de Freqüências - Corrente da Fonte - Técnica 2. . . 48
4.36 Corrente do Filtro - Via DSP. . . 48
4.37 Potências Instantâneas Ativa e Reativa, respectivamente. . . 48
4.38 Potências Ativa Oscilante e Real, respectivamente. . . 49
A.1 Sensor de Tensão ca. . . 60
A.2 Sensor de Tensão cc. . . 60
1.1 Potência eólica instalada de 1997 à 2007. Fonte: Atlas de Energia Elétrica do Brasil - 3aedição. . . 2 1.2 Potência eólica instalada em 2007. Fonte: Atlas de Energia Elétrica do
Brasil - 3aedição. . . . 3
Introdução
1.1
Considerações Preliminares
1.1.1
Demanda de Energia
O sistema elétrico brasileiro vem demonstrando uma crescente necessidade por novas fontes de energia para suprir a demanda energética decorrente do crescimento popula-cional, das necessidades do crescimento econômico e dos avanços tecnológicos.
A partir do racionamento de energia ocorrido em 2001, várias políticas públicas foram criadas para incentivar a exploração de novas fontes de energia, com a finalidade de me-lhorar a confiabilidade no abastecimento de energia, principalmente através de fontes renováveis (PEREIRA, 2004).
Uma dessas políticas foi o Programa Emergencial de Energia Eólica (PROEÓLICA), que tinha como objetivo incentivar investimentos na área da geração eólica por meio de benefícios, tais como, garantir a compra de energia gerada por um prazo mínimo de 15 anos e garantir preços determinados pela Agência Nacional de Energia elétrica (ANEEL). Através da Lei n◦ 10.438 de 15 de abril de 2002, foi regulamentado o Programa de
Incentivo às Fontes Alternativas de Energia Elétrica (PROINFA), que estabeleceu a con-tratação de 3.300 MW de energia no Sistema Interligado Nacional em esquema de geração distribuída produzidos por, biomassa, pequenas centrais hidrelétricas e fontes de energia eólica (MME).
De um modo geral, esses projetos procuram diversificar a matriz energética brasileira, o que também resultou em um crescente interesse das empresas em investirem no desen-volvimento de novas tecnologias (ANEEL).
Nessa procura pela diversidade de fontes, a energia eólica se tornou uma das mais vantajosas opções, o que também está fortemente relacionado à questão ambiental, devido ao baixo impacto causado por essa fonte de energia, tema muito discutido atualmente.
Dentre as principais vantagens encontradas na energia eólica, podem-se destacar:
• Mínimo impacto ambiental (baixo ruído, energia limpa e renovável);
• Pequena área de construção e movimentação de terra;
• Incidência nula sobre as características físico-químicas do solo;
• Fonte inesgotável;
• Os parques eólicos são compatíveis com outros usos e utilizações do terreno (como,
por exemplo, a agricultura ou a pecuária);
• Os recursos eólicos do mundo, viáveis de serem utilizados, são maiores que a de-manda mundial de energia.
A energia eólica já vem sendo utilizada há muito tempo, porém suas aplicações se resumiam a atividades voltadas para geração de energia mecânica, como movimentação de barcos, bombeamento de água e moagem de grãos. Para geração de energia elétrica, os estudos se iniciaram no século XIX, mas foi somente em 1976, na Dinamarca, a ligação do primeiro aerogerador ligado a rede elétrica (MME).
Inicialmente, o custo para implantação das turbinas eólicas era muito elevado em com-paração a outras fontes de energia. No entanto, com os avanços tecnológicos, essa relação custo-benefício vem decrescendo bastante, tornando essa alternativa cada vez mais com-petitiva. Alguns desses avanços foram:
• Avanço no estudo da aerodinâmica das pás tornando a turbina mais eficiente, re-sistente e segura;
• Redução de custos e aumento da robustez de equipamentos de eletrônica de potên-cia;
• Desenvolvimento de novas estratégias de controle e operação de aerogeradores.
• Avanço na tecnologia de engenharia de materiais;
Diversas pesquisas comprovam o crescimento da energia eólica no cenário mundial. De acordo com a ANEEL, a capacidade instalada mundial da energia eólica aumentou 1.155% entre 1997 e 2007, como é mostrado na Tabela 1.1:
Tabela 1.1: Potência eólica instalada de 1997 à 2007. Fonte: Atlas de Energia Elétrica do Brasil - 3aedição.
Durante esses anos, os principais países que investiram nessa área foram Alemanha, Estados Unidos e Espanha, de acordo com a Tabela 1.2, que concentram quase 60% da capacidade total instalada em 2007. Pode-se também destacar a posição do Brasil em 25◦
lugar.
Tabela 1.2: Potência eólica instalada em 2007. Fonte: Atlas de Energia Elétrica do Brasil - 3aedição.
utilizado, já representam mais de 250% da produção mundial de energia elétrica em 2007, que foi de 18,9 mil TWh. Com isso, pode-se justificar o crescente interesse em investir no desenvolvimento de tecnologias para a produção de energia eólica.
1.2
Revisão Bibliográfica
Nesta seção do trabalho é apresentada uma revisão bibliográfica envolvendo as topolo-gias de aerogeradores existentes, assim como um maior detalhamento sobre Filtros Ativos de Potência, explorando as suas características, classificações e modelos.
1.2.1
Topologias de Aerogeradores
Os aerogeradores podem ser classificados quanto a diversos fatores, tais como: tipo de máquina (síncrona ou assíncrona), controle de potência e formas de conexão à rede elétrica. Atualmente existem três configurações básicas para os aerogeradores: gerador de indução com rotor em gaiola, gerador síncrono e gerador de indução com rotor bobinado duplamente excitado (DFIG) (BAZZO, 2007).
Gerador de Indução - Gaiola
à rede elétrica e o gerador opera com velocidade fixa (com uma pequena variação devido ao escorregamento que varia com a carga).
Apesar dessa configuração apresentar vantagens em relação ao DFIG no que diz res-peito ao custo de implantação e manutenção e à simplicidade do rotor tipo gaiola, o fato de operarem com velocidade fixa impede o aproveitamento da potência máxima para ve-locidades de vento diferentes da nominal (BAZZO, 2007 e NUNES, 2003).
Figura 1.1: Gerador de Indução - Gaiola de Esquilo
Gerador Síncrono
No aerogerador com gerador síncrono, apresentado na Figura 1.2, o elevado número de pólos dispensa a utilização de uma caixa de engrenagens. Como a freqüência gerada varia diretamente em relação a velocidade da turbina, ou seja, com a velocidade do vento, a conexão com a rede elétrica se dá através de um conversor de freqüência.
Comparada à configuração anterior, apesar de necessitar de um gerador mais caro e de um conversor de freqüência, ela dispensa a caixa de engrenagens e pode trabalhar com velocidade variável, o que resulta num melhor aproveitamento energético (OLIVEIRA, 2006).
Figura 1.2: Gerador Síncrono
DFIG
con-versor de potência bi-direcional conhecido como back-to-back (FERREIRA, 2005). A Figura 1.3 apresenta de forma esquemática a configuração. O DFIG também opera com velocidade variável, multiplicador de velocidade e utiliza o conversor no circuito do rotor. Apesar de algumas desvantagens como a necessidade da caixa multiplicadora de ve-locidade, diversas vantagens podem ser destacadas, como por exemplo:
• A maior parte da potência é transferida diretamente do estator da máquina para a rede elétrica;
• Opera com velocidade variável;
• Tamanho reduzido do conversor de freqüência, pois os mesmos são dimensionados para cerca de 30 % da potência total do sistema;
• Flexibilidade para controle, já que o conversor conectado ao rotor amplia recursos de controle;
• Controle independente de potência ativa e reativa.
Figura 1.3: DFIG
Entre os trabalhos realizados sobre o DFIG, podem-se destacar aqueles com objetivo de realizar estudos sobre a conexão à rede elétrica (ZHANG et al, 2006), a modelagem (GHENNAM at al, 2009), o aprimoramento e desenvolvimento das técnicas de controle (VIEIRA et al, 2008 e YIN et al, 2006) e os dispositivos extras utilizados nessa configu-ração (ZHANG, 2007).
1.2.2
Filtros Ativos de Potência
Introdução
Inicialmente, os projetos realizados para compensação de harmônicos focavam o uso de elementos passivos, em geral, filtros formados praticamente por capacitores e indu-tores. Apesar das vantagens com relação à facilidade no projeto dos componentes e ao baixo custo, a filtragem por elementos passivos apresenta problemas em relação ao tamanho elevado dos componentes, valores de compensação fixos e o fato dos elementos poderem entrar em ressonância com a rede de alimentação (DAS, 2004).
o tipo de conversor de potência utilizado, número de fases e o número de níveis. Nesse contexto, os filtros ativos apresentam uma forma dinâmica de correção, adaptando-se às variações da carga (AKAGI, 1996 e SINGH et al, 1999).
Topologias
Em relação às topologias, diversos trabalhos foram publicados sobre as diferentes classes de filtro ativo de potência, descrevendo o princípio de funcionamento, a estrutura, a viabilidade de implantação, as vantagens e as desvantagens individuais de cada um. Os filtros ativos podem ser classificados em relação à topologia como: paralelo, série, híbrido e universal.
O filtro ativo em paralelo é um dos mais utilizados para compensação de harmônicos. Nesse tipo de filtro, visto na Figura 1.4, o inversor injeta uma corrente que, somada à cor-rente da fonte, ocasione o cancelamento dos harmônicos de corcor-rente, resultando apenas na componente fundamental de corrente para abastecer o sistema. Essa topologia é utilizada para eliminar os harmônicos de corrente, a compensação de reativo e o balanceamento de correntes desequilibradas (CARDONER et al, 2007 e AREDES et al, 1997).
Figura 1.4: Filtro Ativo de Potência Paralelo
O filtro ativo em série, apresentado na Figura 1.5 tem como principais finalidades eliminar os harmônicos de tensão, além de balancear e regular a tensão no ponto terminal da linha ou da fonte. Esse modelo de filtro consiste na injeção de uma tensão em série com a tensão da fonte através do uso de um transformador de acoplamento. Essa ten-são injetada terá um valor tal que, somado com o da fonte, resulte numa forma de onda senoidal livre de harmônicos.
Uma das principais desvantagens consiste na corrente de carga ser a mesma que passa pelo filtro, resultando em maiores perdas por chaveamento, já que trabalha com correntes mais elevadas, mas leva vantagens no que diz respeito à eliminação de harmônicos de tensão e ao balanceamento de sistemas com desequilíbrios de tensão.
Figura 1.5: Filtro Ativo de Potência Série
Geralmente são encontradas as seguintes configurações nos filtros híbridos: filtro ativo paralelo com passivo paralelo e o filtro ativo série com passivo paralelo, sendo esse último o mais utilizado (VALDEZ et al, 2008 e CHEN et al, 2002).
Figura 1.6: Filtro Ativo de Potência Híbrido
O filtro ativo universal surgiu da junção dos filtros ativos série e paralelo. Sua estru-tura, apresentada na Figura 1.7 é composta por dois conversores, um para a compensação de tensão e outro para a compensação de corrente, usualmente alimentados por um mesmo barramento. As principais desvantagens seriam o custo elevado, a forma de controle mais complexa, um maior número de chaves e de sensores e uma maior perda por chaveamento (GRAOVAC et al, 2007).
Tipo de conversor
Figura 1.7: Filtro Ativo de Potência Universal
Número de Fases
Os filtros ativos são classificados também em monofásicos, trifásicos a três fios ou trifásicos a quatro fios. Os monofásicos possuem aplicações para cargas não-lineares monofásicas, como é o caso dos computadores pessoais (LINDEKE et al, 2004).
Nos trifásicos a três fios, não há circulação da componente de seqüência zero pelo filtro e geralmente este sistema é usado na compensação de distúrbios presentes em uma rede trifásica à três fios (MASSOUD et al, 2007 e JACOBINA et al, 2008). Nos trifásicos à quatro fios, ocorre circulação da componente de seqüência zero pelo filtro e geralmente é utilizado para compensação de correntes de neutro, potência reativa e desbalanceamento de corrente (CARAVILHA et al, 2008).
Número de Níveis
Em relação ao número de níveis, os filtros ativos podem se dividir em dois níveis, para aplicações em baixas potências; em três níveis, para médias potências; ou em multiníveis, para altas potências e altas tensões (AKAGI, 1990).
Controle de Referência
No controle encontra-se a principal parte do projeto de um filtro ativo de potência. Nele, é de fundamental importância a escolha do modo como se vai gerar o sinal de referência e a melhor técnica de controle utilizada para sintetizar esse sinal gerado. Com isso, consegue-se obter uma melhor resposta dinâmica, uma maior estabilidade e propiciar uma maior robustez ao sistema (CAMARGO, 2002).
As formas de obtenção do sinal de referência se dividem em dois grupos: os que uti-lizam o sinal no domínio do tempo e o sinal no domínio da freqüência. No domínio do tempo, destaca-se o método das componentes símetricas, onde Fortescue desenvolveu o teorema em que um sistema desequilibrado de nfasores pode ser decomposto em n sis-temas de fasores equilibrados, denominado de componentes simétricas (YEUNG, 1983).
Referência Síncrona d-q ou dos Eixos Girantes (FUGIKA et al, 2005), que utiliza a trans-formada de Park; o método da Sintonia Única (CAMARGO, 2002); controlador por mo-dos deslizantes (MIRET et al, 2004) entre outros.
Quanto à técnica de controle utilizada, pode-se dividir em controladores analógicos, que utilizam amplificadores operacionais, resistores e capacitores (SAETIEO et al, 1995) ou em controladores digitais, como os que utilizam os DSPs, como por exemplo (BOT-TERÓN et al (2001 e SONG et al, 1999).
Os controladores analógicos possuem as vantagens de uma fácil implementação e uma boa resposta dinâmica, mas apresentam problemas com relação a sensibilidade a ruídos, enquanto os digitais possibilitam o desenvolvimento de algoritmos de controle, permitindo uma maior flexibilidade na implementação de diferentes estratégias de con-trole.
Entre as principais técnicas de controle, existem os controladores que operam com freqüência variável, como o controlador por Histerese (MUTSCHLER e MEINHARDT, 1998), o controlador com Freqüência de Chaveamento Limitada e os controladores de freqüência fixa (CAMPOS et al, 1994), como controlador Proporcional-Integral (PI) e o controlador com Realimentação de Estado.
Outros exemplos de técnicas utilizadas são os controladores que utilizam redes neurais e a lógica Fuzzy (JAIN et al, 2002). O controle em malha aberta, apesar de pouco uti-lizado, apresenta uma estratégia de controle mais simples. O controle em malha fechada, mais comumente utilizado, possui uma ampla faixa de aplicações, permitindo um com-portamento dinâmico ao sistema. Nos filtros ativos, existem uma malha interna de con-trole, responsável pela compensação de corrente e uma malha externa, responsável pela regulação do barramento CC.
Para garantir que o sinal gerado esteja na mesma fase com a rede elétrica, é necessário utilizar métodos de sincronismo, que, de modo geral, apresentem uma resposta rápida, livre dos distúrbios presentes na rede. Esses métodos também se dividem em malha aberta ou malha fechada (GHARTEMANI e IRAVANI, 2004 e ROLIM et al, 2006).
1.2.3
Harmônicos na Rede
Os sistemas elétricos vêm apresentando diversos problemas devido ao aumento de car-gas não-lineares conectadas. Alguns exemplos dessas carcar-gas são os retificadores, inver-sores, dispositivos de acionamentos de máquinas, fornos a arco, lâmpadas fluorescentes, fontes chaveadas e dispositivos magnéticos saturados (TEY, 2005).
Dentre os principais distúrbios causados ao sistema de energia, podem-se destacar a excessiva corrente no neutro em sistemas trifásicos a quatro fios, o baixo fator de potên-cia, o aumento das perdas, o mal funcionamento de alguns equipamentos e a injeção de harmônicos.
Esses harmônicos acabam alterando significativamente as formas de onda de corrente e de tensão, ocasionando perdas excessivas nos motores devido ao aquecimento, ruptura no dielétrico de bancos de capacitores, sobretensão, interferências indutivas, oscilações mecânicas de máquinas de indução e síncronas.
freqüên-cia múltipla da componente fundamental. As componentes harmônicas causam distorção na forma de onda da corrente e quanto menor sua freqüência, maior será a distorção.
Existem diversos métodos utilizados para quantificar o nível de distorções provocadas pela presença de harmônicos em um sinal, entre eles: o fator de potência, fator de crista, a potência de distorção e a taxa de distorção harmônica. Nesse trabalho será utilizado esse último método mencionado para analisar os resultados obtidos.
O THD (Taxa de Distorção Harmônica), bastante utilizado para esse tipo de análise, é calculado através da seguinte equação:
T HD= s
hmax
∑
h=2M
2
h
M1 (1.1)
onde:
hé a componente harmônica;
Mé o valorrmsda componente harmônicahdo sinal;
Normas e recomendações foram criadas para serem estabelecidos os limites dos valo-res dos harmônicos injetados na rede, entre elas: a IEC 61000-3-2, que limita a injeção de harmônicos para equipamentos de baixa tensão, com correntes inferiores a 16A por fase; a IEC61000-3-3, que limita as variações de tensão devido a flutuações e cintilações em sistemas de baixa tensão para equipamentos com 16A por fase; a IEC 61000-3-4, que limita a injeção de harmônicos para equipamentos de baixa tensão com corrente superior a 16A por fase e a IEEE 519, que estabelece limites de distorção harmônica no ponto de acoplamento comum (PAC).
Devido a esses problemas, inúmeros trabalhos vem sendo desenvolvidos para melho-rar a qualidade de energia visando à filtragem desses harmônicos, principalmente na área de filtros ativos de potência.
1.3
Conclusão
Após um levantamento histórico sobre os problemas relacionados à presença de har-mônicos no sistema de energia elétrica, destacando as causas e conseqüências, e uma re-visão dos tipos de aerogeradores mais utilizados, foi realizado um estudo mais detalhado sobre os filtros ativos de potência existentes, descrevendo as vantagens e desvantagens de cada tipo, assim como as características relacionadas ao tipo de conversor utilizado, número de fases, números de níveis e o controle do sinal de referência.
Fundamentação Teórica
Este capítulo apresenta a fundamentação teórica necessária para a concretização deste trabalho. É apresentada uma breve teoria de máquinas elétricas aplicada a geradores de indução, a Teoria Generalizada das Potências Instantâneas e as formas de obtenção das correntes de referência utilizadas no sistema de controle.
2.1
Teoria de Máquinas
A máquina de indução é bastante utilizada em diversas aplicações, sendo dividida em duas categorias: a de rotor em gaiola de esquilo e a de rotor bobinado. A primeira cate-goria apresenta uma maior simplicidade no aspecto construtivo, onde o rotor é formado por barras curto-circuitadas através de anéis, não apresentando contato elétrico com o ex-terior; e a segunda categoria, apresenta três terminais livres em cada uma das bobinas do enrolamento, ligadas a três anéis coletores. Estes três anéis podem ser ligados exterior-mente a um reostato de arranque constituído por três resistências variáveis, onde pode-se controlar o valor da corrente que passa pelas bobinas.
Observa-se que, se é possível, através de resistores, retirar energia através do rotor da máquina, também será possível injetar energia. Esse é o princípio que dá origem a uma aplicação muito comum na atualidade, que é o gerador de indução duplamente excitado.
As equações básicas que descrevem a modelagem de uma máquina de indução são facilmente encontradas na literatura. De um modo geral, para se reduzir a complexidade das equações de tensão que descrevem o modelo da máquina, elas são transformadas de um sistema trifásico para um sistema bifásico com eixos estacionários (transformação
αβ0) e em seguida, em um sistema bifásico com eixos girantes (transformada de Park).
Essa modelagem matemática é muito bem descrita em BARBI (1985) e serve como base para os resultados obtidos no decorrer deste trabalho.
Figura 2.1: Transformação 123 para dq.
2.2
Teoria Generalizada das Potências Instantâneas
2.2.1
Introdução
Hoje bastante conhecida na literatura, diversos trabalhos na área de filtragem ativa utilizam a Teoria Generalizada das Potências Instantânes, desenvolvida por AKAGI et al (1983). Nos trabalhos que se seguiram, essa teoria, além de aplicações em controle de filtro ativo, também permitiu a sua utilização em problemas aplicados a sistemas desba-lanceados ou não, apresentando distorções (WATANABE e AREDES).
A técnica utiliza a transformação do sistema tradicionalabcpara o sistemaαβ0 , onde se pode calcular as potências real e imaginária, decompostas em uma parcela constante e outra oscilante. Esse detalhamento será demonstrado na próxima seção do trabalho.
2.2.2
Modelagem
O cálculo das potências instantâneas em um sistema trifásico é dado por:
p(t) =vaia+vbib+vcic (2.1)
Em termos das componentesαβ0, a equação pode ser escrita como:
p(t) =vαiα+vβiβ+v0i0 (2.2)
de onde se obtem a potência ativa instantânea.
As componentes do eixo zero só passam a existir caso o circuito apresente o fio neu-tro e sua carga apresente desequilíbrios, o que não representa o sistema estudado nesse trabalho.
Diferente do cálculo da potência ativa, a potência reativa instantânea surge da multi-plicação vetorial, representada pela equação (AKAGI, 1999):
~q=q.~0+q′.~α+q′′.~β (2.3)
dadas por: p q q′ q′′ =
vα vβ v0
−vβ vα 0
0 −v0 vβ
v0 0 −vα
. iα iβ i0 (2.4)
O diagrama de blocos da Figura 2.2 representa o esquemático para a obtenção das potências instantâneas a partir das medições das tensões e correntes do sistema trifásico.
Figura 2.2: Diagrama de Cálculo das Potências Instantâneas. onde:
pé potência real instantânea; ˜
pé potência real oscilante; ¯
pé potência real constante;
q,q′,q′′ são as parcelas da potência imaginária.
Através de manipulações algébricas e sabendo-se que, instantaneamente a soma das parcelas da potência reativa é igual à zero e que o sistema é à três fios, é possível obter as correntes sobre os eixosαβ0:
iα iβ i0 = 1
vβ|~v|2
vαvβ −
v2
β+v20
−vαv0
v2
β vαvβ −vβv0
vβv0 vαv0
v2
α+v2β
. p q q′ (2.5) de onde,
|~v|2=vα2+v2β+v20
(2.6) A partir desse estudo inicial, aplicamos a Teoria Generalizada das Potências Instan-tâneas ao controle do filtro ativo, buscando a obtenção das correntes de referências.
Para isso, separa-se as parcelas que deverão ser supridas pelo filtro ativo ( ˜p,q,q′) da
recalculadas as correntes fornecidas pela fonte:
iαf onte
iβf onte
i0f onte
=
1
vβ|~v|2
vαvβ −
v2β+v20 −vαv0
v2
β vαvβ −vβv0
vβv0 vαv0
v2
α+v2β
. ¯ p 0 0 (2.7)
Em relação às correntes do filtro ativo de potência, pode-se dividir, para efeito de si-mulação, o sistema em duas parcelas. A primeira corresponde ao suprimento de potências reativas, representada por:
iαf1
iβf1
i0f1
=
1
vβ|~v|2
vαvβ −
v2β+v20 −vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . 0 q q′ (2.8)
e a segunda, responsável pelo suprimento da potência oscilante vista anteriormente, re-presentada por:
iαf2
iβf2
i0f2
=
1
vβ|~v|2
vαvβ −
v2β+v20 −vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . ˜ p 0 0 (2.9)
Essas duas parcelas serão aplicadas no capítulo 4 para análise de simulações.
Daí, obtém-se a matriz geral para obtenção das correntesαβ0 de referência do filtro ativo, representada por:
iα iβ i0 = 1
vβ|~v|2.
vαvβ −
v2β+v20 −vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . ˜ p q q′ (2.10)
2.3
Método de Sincronismo
Como visto anteriormente no Capítulo 1, existem métodos de malha fechada e méto-dos de malha aberta para garantir que o sinal gerado pelo sistema esteja em sincronismo com o sinal da fonte de alimetação.
A estrutura em malha fechada, também conhecida como Phase Locked Loop (PLL), por ser menos suscetível aos harmônicos, a desequilíbrio de tensão e a variações de fre-qüência, possui um alto tempo de processamento para a determinação do ângulo de fase da tensão, que possibilita o sincronismo.
de sincronização em malha aberta, baseados na medição das tensões da rede, aplicados a conversores PWM trifásicos a três fios que tenham capacidade de operar sob condições de desequilíbrios, distorções harmônicas e variações de freqüência.
Nesse trabalho, será utilizado um dos métodos propostos em CAMARGO et al (2005), conhecido como Modified Synchronous Reference Frames - Low-Pass Filter Based (MSRF - LPF-B). Nele, o ângulo de sincronização ou o vetor de sincronização normalizado é obtido diretamente a partir das tensões da rede. O método utiliza filtros passa-baixas, com a finalidade de atenuar as componentes harmônicas provenientes das tensões da rede.
Com a transformada de Clarke das tensões de entrada (Vαβ) é possível se obter o módulo, demonstrado em 2.11 e em seguida, obtem-se o (sen(θ),cos(θ)), demonstrado em 2.12, que são utilizados para sincronizar as variáveis de saída do inversor.
Vαβ = r V2
α +Vβ2
(2.11)
sen(θ) = Vβ kVαβk
cos(θ) = Vα kVαβk
(2.12) A Figura 2.3 representa os sinais seno e cosseno resultantes do método de sincronismo utilizado, implementado pelo DSP TMS320F2812.
Figura 2.3: Seno e cosseno obtidos a partir do uso do método de sincronização proposto.
2.4
Estratégias para a Determinação das Correntes de
Referência
dos harmônicos da corrente de carga e a partir da aplicação das Teorias Generalizadas das Potências Instantâneas.
2.4.1
Referências de corrente através de Referencial Síncrono dq
A primeira técnica utilizada, consiste em, a partir da leitura das correntes trifásicas da carga, transformar o sinal obtido em um sistema bifásico com eixos estacionários (trans-formaçãoαβ0) e em seguida, em um sistema bifásico com eixos girantes (transformada
de Park).
Com as correntes no formatodq, realiza-se uma filtragem dessas correntes, retirando a componente fundamental, resultando apenas nas correntes harmônicas, representadas por idh∗ iqh∗, que serão as correntes de referência para o filtro ativo. A freqüência de
corte utilizada para as simulações e para os testes experimentais foi sempre a metade da freqüência da fonte. O diagrama da Figura 4.4 representa a obtenção dessas correntes.
Figura 2.4: Diagrama para obtenção das correntes de referência - Técnica 1.
2.4.2
Referências de corrente através das Potências Instantâneas
A segunda técnica proposta para análise desse trabalho consiste na medição dos va-lores de tensão da fonte e corrente de carga do sistema trifásico, em seguida, aplica-se a transformadaαβ0 nos dois sinais e é realizado o cálculo das potências instantâneas. Como
discutido nas seções anteriores, a partir dos valores das potências instantâneas, podemos obter as correntes de referência para o sistema, representas por id∗ iq∗ e demonstrado
pelo diagrama da Figura 4.11. A freqüência de corte utilizada para a filtragem da potên-cia ativa nas simulações e nos testes experimentais foi sempre a metade da freqüênpotên-cia da fonte.
2.5
Conclusão
Neste Capítulo foram apresentados alguns conceitos básicos, como uma breve teoria sobre máquinas de indução, os conceitos das transformações de Clark e Park e o esquema geral de implementação do método de sincronização MSFR- LPF-B, utilizado para en-contrar o ângulo de referência do sistema.
Projeto Experimental
Esta seção apresenta os recursos laboratoriais e computacionais, esquema de mon-tagem e demais equipamentos utilizados para monmon-tagem da bancada experimental.
3.1
Estrutura Laboratorial
Todos os equipamentos utilizados para a montagem da bancada experimental serão apresentados a seguir, destacando as suas características nominais, formas de ligação e limitações. Esta bancada também servirá para o desenvolvimento de trabalhos futuros, principalmente no estudo do Gerador de Indução Duplamente Excitado - DFIG.
3.1.1
Motor CC
Para simular a atuação dos ventos, será utilizada uma máquina CC demonstrada pela Figura 3.1. Este motor é alimentado por uma fonte de alimentação cc ajustável.
Os enrolamentos de armadura e de campo foram conectados em série. As caracterís-ticas nominais do motor são:
• Potência Ativa: 1,2 CV;
• Tensão: 180 V; • Corrente: 6 A;
• Rotação: 1800 rpm.
3.1.2
Gerador de Indução
A máquina de indução que será utilizada é graficamente apresentada pela Figura 3.2. O gerador apresenta 12 terminais disponíveis, sendo conectados na configuração estrela-paralelo. Tanto o motor CC quanto o gerador de indução são da marca: Tesitec. As características nominais do gerador são:
• Potência Ativa: 1 CV;
• Tensão: 180 V;
Figura 3.1: Máquina CC.
Figura 3.2: Máquina de Indução de rotor bobinado.
• Corrente Nominal: 3,8 A;
• Rotação: 1700 rpm.
Assim, após as descrições dos valores nominais do motor CC e do gerador de indução, o conjunto utilizado é demonstrado na Figura 3.3.
3.1.3
Capacitor de Compensação
O capacitor utilizado para a excitação inicial do gerador é apresentada na Figura 3.4. Foram utilizados 6 capacitores monofásicos como esse e foram ligados no formato delta-série. As suas características nominais são:
• Potência Reativa: 1kVAr; • Tensão: 220 V;
• Corrente: 8 A;
Figura 3.3: Conjunto: Motor CC + Gerador de Indução.
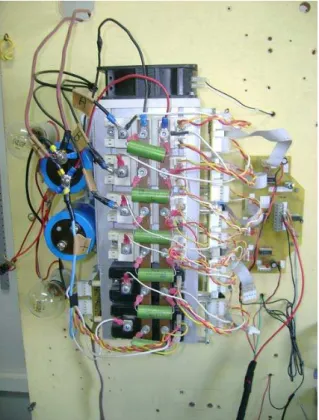
Figura 3.5: Bloco de Sensores.
3.1.4
Bloco dos Sensores
A Figura 3.5 demonstra o bloco de sensoriamento da bancada montada. Os diagramas esquemáticos dos sensores são mostrados no Apêndice. Esse bloco é composto por:
• Fonte de Tensão de 5 V (1);
• Fonte de Tensão Simétrica 15 V (1);
• Sensor de Tensão cc (1); • Sensor de Tensão ca (6);
• Sensor de Corrente ca (6).
De um modo geral, os sensores recebem o sinal do sistema por dispositivos de efeito Hall (sensores de corrente e sensor de tensão cc do capacitor) e por transformadores de tensão (sensores de tensão ca). Em seguida, o sinal é filtrado e condicionado para uma faixa de operação de modo à torná-los acessíveis à leitura do canal AD do DSP. Todas as saídas dos sensores apresentam um sinal de offset de 1,5 V.
Para a realização da calibração dos sensores, os sinais de offset e ganho são ajustados através de comparações com as leituras dos mesmos sinais via osciloscópio. O sensor de tensão cc do capacitor está calibrado para leituras de 600 à 900 V e os sensores de corrente estão calibrados para correntes de até 5A. Alguns filtros passa-baixa foram in-seridos nos sensores devido a problemas com interferências provocadas pelo chaveamento dos IGBT’s.
3.1.5
Interface de Comando dos Pulsos
Figura 3.6: Placa de Condicionamento dos Pulsos PWM.
O driver consiste em um dispositivo que recebe o sinal do circuito de controle e co-manda os IGBTs, através de níveis de tensão em +15Vcc para Turno on e -7Vcc para Turn off, com dead band (tempo morto) pré-definido de fábrica para 3.25 µs, Cada módulo fornece o interfaceamento completo com os IGBTs de um braço da ponte retificadora. Pontos de acesso permitem também que se programem alguns parâmetros do módulo. O esquemático do módulo SKHI22A encontra-se no Apêndice.
A seguir são citadas algumas características desses dispositivos (drivers):
• Geração do tempo morto;
• Proteção de curto-circuito;
• Ajuste de referência de tensão para o monitoramento de Vce sobre a junção dos IGBTs;
• Tempo de estabelecimento de comutação do IGBT; • Tempo de estabelecimento de corte do IGBT.
3.1.6
Inversor
O inversor de potência utilizado é apresentada na Figura 3.8. Ele possui 6 braços, o que permitirá a evolução desse trabalho atual para a montagem da configuração DFIG. Ele é composto por 4 módulos SKHI22A e 2 módulos SKHI24. O link cc do inversor apresenta 2 capacitores em série, tendo cada um, uma capacitância de 1mF e tensão no-minal de 400 V, resultando numa tensão máxima de 800 V no link. Foram utilizados 3 indutores para o acoplamento do inversor ao sistema. O indutor apresenta uma indutância de 35 mH e uma resistência interna de 6Ω. Um deles pode ser observado na Figura 3.9.
3.1.7
Carga Não-linear
A carga não-linear utilizada é demonstrada na Figura 3.10. Ela é composta por um retificador a diodos, um capacitor e uma carga de lâmpadas.
3.2
Recursos Computacionais
Na fase de simulação foi utilizado o Borland C++ para a comprovação do objetivo do trabalho e os resultados serão demonstrados no capítulo seguinte. Para a implementação prática, foi utilizado o DSP - TMS320F2812, detalhado a seguir.
3.2.1
DSP - TMS320F2812
Introdução
Figura 3.8: Inversor.
Figura 3.10: Carga não-linear.
Descrição do Módulo
O módulo escolhido para o sistema, desenvolvido comercialmente pela Spectrum Digital foi o eZdspF2812, o qual foi arquitetado sobre o processador digital de sinais TMS3202812 de 32 bits da Texas Instruments sob a arquitetura de ponto fixo em hard-ware, como mostrado na Figura 3.12.
Figura 3.12: Visão Geral do Módulo onde:
P1−Interface JTAG;
P2−Pinos de Expansão;
P3−Controlador de interface paralela Port/JTAG;
P4/P8/P7−Interface de entrada e saída;
P5/P9−Interface Analógica;
P6−Fonte de Alimentação.
A família C28x apresenta uma excelente capacidade de processamento, altas taxas de transferência de dados e baixo custo dos recursos integrados, tornando-se um ótimo dispositivo para ser usado em diversos sistemas embarcados.
Ambiente de Programação
Para que o DSP em questão possa ser configurado de acordo com as necessidades que o sistema a ser controlado requer, é necessário se efetuar a programação através do "code composer", pois este ambiente possibilita o acesso a todos os registradores que permitirão o ajuste adequado do DSP para o fim desejado, onde o mesmo pode ser programado através das linguagens C/C++ e assembler, ficando a critério do programador a escolha.
Sinal de Entrada para o DSP
Figura 3.13: Leituras de Sinais via DSP
3.2.2
Algoritmo Implementado - Diagramas de Blocos
Nesta seção do trabalho serão detalhados os diagramas de blocos dos algoritmos im-plementados no ambiente de programação do DSP2812, sendo utilizado a linguagem C/C++.
Técnica 1 - Referencial Síncrono dq.
Figura 3.14: Representação do algoritmo implementado - Técnica 1
de tensão trifásicos são transformados para um sistema bifásico com eixos estacionários (transformação αβ0) e em seguida é obtido o ângulo θ∗, atráves do sen(θ) e cos(θ), possibilitando, assim, a implementação de uma rotina para a obtenção do sincronismo, com a finalidade de sincronizar o conversor PWM com o sinal da Fonte.
As correntes trifásicas de carga são lidas a partir de um segundo bloco de sensores. Elas são transformadas de um sistema trifásico para um sistema bifásico com eixos esta-cionários (transformaçãoαβ0) e em seguida, em um sistema bifásico com eixos girantes
dq (transformada de Park). Após passarem por um filtro passa alta, obtem-se as correntes de referência, representadas por idh∗e iqh∗ e serão somadas a essas correntes os
valo-res de idre f e iqre f. O resultado é somado as correntes id f e iq f, às quais resultam da
subtração da corrente da Fonte menos a corrente de Carga. Com isso, é gerado um erro que é aplicado na entrada de dois controladores PI (um para cada sinal), os quais são res-ponsáveis pela geração dos sinais Ud e Uq. Os sinais de saída dos controladores PI são
limitados dentro desta faixa de operação. A corrente idre f é o resultado do erro gerado
entre a tensão do link do capacitor (Vdc) com a tensão cc de referência (Vre f), após passar
por um controlador PI.
Com a obtenção desses sinais Ude Uqe do ânguloθ∗calculado a partir do método de
sincronização MSRF-LPF-B, são gerados os sinais de referência para a rotina de PWM, que tem como saída as razões cíclicas para cada chave do conversor.
Técnica 2 - Potências Instantâneas.
Na segunda técnica abordada, a diferença do sistema explicado na técnica 1 consiste apenas na obtenção das correntes idh∗ e iqh∗. A partir das tensões de entrada e das
correntes da carga já transformadas em αβ0, são obtidas as potências instantâneas do sistema. Em seguida, através da modelagem já demonstrada no Capítulo 2, são obtidas as correntes de referência do sistema. A Figura 3.15 demonstra os blocos dessa segunda análise.
3.3
Esquema Geral de Montagem
O esquema geral de montagem pode ser visto através da Figura 3.16. Como pode-se observar, são utilizados uma fonte CC e um motor CC para simular a atuação dos ventos. O motor CC está acoplado diretamente ao gerador de indução. É utilizado um banco de capacitores conectado ao gerador de indução para suprir a potência reativa e realizar a sua excitação.
Para realizar o acionamento do sistema e o carregamento inicial do banco de capacito-res antes dele ser acoplado ao estator do gerador, foi montado um quadro de acionamento, visto na Figura 3.17. De um modo geral, o quadro possibilita os seguintes procedimentos:
• B1 - Carrega o bando de capacitores;
• B2 - Desconecta o banco do Varivolt e conecta aos terminais do estator do gerador;
Figura 3.15: Representação do algoritmo implementado - Técnica 2
Figura 3.17: Quadro - acionamento.
Com isso, o banco de capacitores é conectado ao estator do gerador apenas quando ele se encontra em velocidade nominal e só após o sistema apresentar as tensões nos seus terminais, é que se conecta a carga não-linear. Uma visão real do sistema montado é apresentada na Figura 3.18.
3.4
Conclusão
Resultados
4.1
Resultados de Simulações
O estudo de desempenho das técnicas propostas nesse trabalho foi avaliado inicial-mente por simulações. Para realização dos testes, foi implementado um programa de si-mulação escrito em linguagem C/C++. Para a fase inicial, o sitema foi composto por uma rede de alimentação trifásica, por uma carga linear não-linear e pelo filtro ativo paralelo de potência.
Nessa etapa, foram aplicados tensões trifásicas constantes ao sistema com valor de pico de 311 V, representadas pela Figura 4.1.
Demais dados utilizados na simulação:
• Freqüência: 60 Hz
• Resitência do Filtro: 50 mΩ;
• Indutância do Filtro: 2 mH;
• Tensão de Referência do Capacitor: 800 V;
• Capacitor: 10 mF.
Figura 4.1: Tensão trifásicas da rede.
Figura 4.2: Corrente de Carga - Fase A.
4.1.1
Referencial Síncrono dq
A primeira técnica utilizada para obtenção das correntes de referência é representada pelo diagrama de blocos da Figura 4.4. Após o funcionamento do filtro ativo de potência paralelo, obtém-se os resultados da Figura 4.5 para a corrente do filtro ativo e a corrente da fonte de alimentação, Figura 4.6. O THD da corrente da fonte é de 7,67% e o seu espectro está apresentado na Figura 4.7.
Figura 4.4: Diagrama para obtenção das correntes de referência - Técnica 1.
Figura 4.5: Corrente do Filtro - Fase A.
Figura 4.6: Corrente da Fonte - Fase A.
Figura 4.7: Espectro de Freqüências - Corrente da Fonte - Fase A.
Com isso, foram obtidos os seguintes resultados finais, onde é demonstrado a corrente da fonte sobreposta à corrente harmônica da carga na Figura 4.9 e a corrente da fonte, sobreposta à tensão da fonte, mostradas na Figura 4.10, ambas referentes a Fase A.
Figura 4.9: Corrente da Fonte / Corrente de Carga
Figura 4.10: Tensão da Fonte / Corrente da Fonte
4.1.2
Referencial pelas Potências Instantâneas
Após a análise do primeiro método de controle proposto nesse trabalho, foi analisada a teoria das potências instantâneas, teoria essa já discutida no Capítulo 2. Para análise de desempenho, foi aplicada a mesma situação proposta no primeiro método.
A segunda proposta é mostrado no diagrama de blocos da Figura 4.11. A principal caractéristica que a diferencia do primeiro modelo, consiste na forma de obtenção das cor-rentes de referência, sendo nessa segunda proposta, provenientes da matriz de referência das potências instantâneas.
As análises serão iniciadas a partir das potências instantâneas obtidas pelo sistema. As potências ativa e reativa instantâneas são demonstradas a seguir, respectivamente pelas Figuras 4.12 e 4.13.
Figura 4.11: Diagrama para obtenção das correntes de referência - Técnica 2.
Figura 4.12: Potência Ativa Instantânea
Figura 4.14: Potência Ativa Oscilante
Figura 4.15: Potência Ativa Real
Figura 4.17: Corrente da Fonte - Fase A - Parcela reativa
Figura 4.18: Corrente da Fonte - Fase A - Parcela ativa oscilante
Realizando um estudo mais detalhado sobre esse segundo método, pode-se dividir o resultado em 3 estapas. Inicialmente, foi utilizada apenas a parcela reativa instantânea para obtenção das correntes de referência do filtro, resultante da matriz abaixo:
iα1
iβ1
i01
=
1
vβ|~v|2
vαvβ −
v2
β+v20
−vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . 0 q q′
onde obtem-se a seguinte corrente da fonte, representada pela Figura 4.17.
Em seguida, analiza-se o efeito da segunda parcela, formada apenas pela componete ativa oscilante, representada pela matriz:
iα2
iβ2
i02
=
1
vβ|~v|2
vαvβ −
v2
β+v20
−vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . ˜ p 0 0
onde observa-se a seguinte corrente da fonte, representada pela Figura 4.18.
Figura 4.19: Corrente da Fonte - Fase A
Figura 4.20: Espectro de Freqüências - Corrente da Fonte - Fase A
iα iβ i0 = 1
vβ|~v|2
vαvβ −
v2β+v20 −vαv0
v2β vαvβ −vβv0
vβv0 vαv0
v2α+v2β . ˜ p q q′
chega-se a corrente desejada, representada pela Figura 4.19. O THD da corrente da fonte agora é de 1,87% e o seu espectro está mostrado na Figura 4.20.
Realizando a análise sobre o controle da tensão no barramento do capacitor e obede-cendo os mesmos parâmetros da primeira situação estudada, chega-se à Figura 4.21.
Com isso, são alcançados os seguintes resultados para o segundo controle proposto nesse trabalho, ilustrados através dos gráficos contendo a corrente da fonte sobreposta a corrente harmônica da carga na Figura 4.22 e a corrente da fonte, sobreposta a tensão da Fonte (Figura 4.23), ambas referentes à Fase A.
potên-Figura 4.21: Tensão no Barramento cc
Figura 4.22: Corrente da Fonte / Corrente da carga
Figura 4.24: Tensões trifásicas de entrada.
Figura 4.25: Correntes da Carga não-linear. cias instantâneas - THD = 1,87%.
4.2
Resultados Experimentais
Para a fase dos testes experimentais, foram aplicados aos dois métodos avaliados as mesmas condições das tensões de entrada produzidas pelo gerador de indução e a mesma carga não-linear. As figuras apresentas a seguir foram obtidas através do Osciloscópio da Tektronix (TPS 2024).
A Figura 4.24 representa as tensões trifásicas de entrada. Como pode-se observar, a tensão apresenta um valor de pico de 130V e uma freqüência de aproximadamente 27 Hz. As correntes da carga trifásica não-linear são mostradas na Figura 4.25 e apresentam um THD de 31,11%, cujo espectro é apresentado na Figura 4.26.
Figura 4.26: Espectro de Freqüências - Corrente de Carga.
Figura 4.27: Tensão e Corrente da fonte - Fase A.
Figura 4.29: Tensão e Corrente da Fonte - Fase A.
Figura 4.30: Tensão da Fonte / Corrente da Fonte / Corrente de Carga - Fase A.
4.2.1
Referencial Síncrono dq
Assim como as etapas demonstradas nas simulações, iniciamos os testes a partir do método de obtenção das correntes de referência conseguidas a partir do referencial sín-crono dq.
Após o funciomamento do filtro, pôde-se observar a Figura 4.29, que representa a tensão da Fonte e a corrente da Fonte, ambas da Fase A. Em seguida é mostrada na Figura 4.30 a tensão da Fonte, a corrente da fonte, já corrigida, e a corrente de carga, todas da Fase A e a corrente do filtro na Figura 4.31. Por último, o espectro da corrente da fonte, representado na Figura 4.32, que representa um THD no valor de 9,36%.
Resumidamente, os valores aproximados dos resultados obtidos foram:
• Tensão no Barramento cc do inversor: 720V;
• Tensão de pico do gerador: 60V; • Freqüência do sistema: 29 Hz;
• Tensão Dc da carga resistiva: 110V;
Figura 4.31: Corrente do Filtro - Via DSP.
Figura 4.33: Tensão da Fonte e Corrente da Fonte - Fase A.
Figura 4.34: Tensão da Fonte / Corrente da Fonte / Corrente de Carga - Fase A.
• Potência da carga: 400W;
• THD - corrente da Fonte: 9,36%.
4.2.2
Referencial pelas Potências Instantâneas
Utilizando agora o método das Potências Instantâneas, verificaram-se os seguintes resultados após o funciomamento do filtro: a Figura 4.33 apresenta o oscilograma da tensão da Fonte e da corrente da Fonte, ambas da Fase A. Em seguida, é mostrada na Figura 4.34 a tensão da Fonte, a corrente da fonte, já corrigida, e a corrente de carga, todas da Fase A. Por último, o THD da corrente de Fonte, calculado em 5,47% e a Figura 4.35, que representa o espectro de freqüências.
Alguns resultados retirados à partir do DSP podem ser destacados: a corrente do filtro, Figura 4.36 , as potências instantâneas ativa e reativa na Figura 4.37 e as potências ativas real e oscilante na Figura 4.38.
Resumidamente, os valores aproximados dos resultados obtidos foram:
Figura 4.35: Aspectro de Freqüências - Corrente da Fonte - Técnica 2.
Figura 4.36: Corrente do Filtro - Via DSP.
Figura 4.38: Potências Ativa Oscilante e Real, respectivamente.
• Tensão de pico do gerador: 60V;
• Frequência do sistema: 29 Hz; • Tensão Dc da carga resistiva: 115V;
• Corrente Dc da carga resistiva: 3,5A;
• Potência da carga: 400W;
• THD - corrente da Fonte: 5,47%.
4.3
Conclusão
Conclusão e Sugestões para Trabalhos
Futuros
5.1
Conclusão
Neste trabalho, foi realizado um estudo comparativo entre duas técnicas para a obten-ção das correntes de referência de um filtro ativo paralelo de potência aplicado no controle de um gerador de indução utilizando o DSP.
Os dois métodos estudados foram implementados com sucesso na bancada experimen-tal. O principal parâmetro para a verificação da eficiência dos métodos foi a comparação da distorção harmônica (THD) na ausência e presença do filtro ativo, assim como, estando ele presente, foram comparados os valores de THD pelos dois métodos.
Pode-se observar uma filtragem dos harmônicos, obtendo em simulações um THD da corrente da Fonte com os valores de 7,67% para o primeiro método e de 1,87% para o segundo método e nos resultados experimentais, um THD de 9,36% para o primeiro e um THD de 5,47% para o segundo, o que comprova uma melhor eficiência no método das potências instantâneas em relação ao referencial síncrono dq.
Estes resultados comprovam a possibilidade de se controlar a qualidade da energia produzida por um gerador de indução, alimentando cargas não-lineares, através do filtro ativo.
Os resultados de simulação e experimentais obtidos comprovam a eficiência do filtro ativo paralelo de potência para a aplicação, com destaque para a técnica das potências instantâneas.
5.2
Sugestões para Trabalhos Futuros
Algumas propostas para trabalhos futuros a partir da base experimental montada são destacadas a seguir.
A evolução do sistema proposto sugere que será importante aumentar os limites do sistema para obtenção de resultados com frequências de 60 Hz e para maiores potências entregues à carga.
Ampliando-se a complexidade, um passo seguinte será implementar um método de sincronização mais robusto e realizar testes dinâmicos simulando variações do vento e de carga.
Nesse caso, propõe-se a substituição da fonte de alimentação variével CC por um sis-tema de acionamento à soft-starter, para que o motor CC utilizado seja acionado baseado nas variações do vento. Com isso, é possível testar a base experimental montada para vari-ações da tensão de entrada baseadas em mudanças reais que possam acontecer de acordo com métodos estatísticos de variação do vento.
Realizar testes de eficiência do sistema montado para analizar quais as proporcionali-dades entre as potências: gerada, consumida na carga e do conjunto (filtro ativo + banco de capacitores).
A complexidade do sistema ainda poderá ser ampliada pela implementação da topolo-gia do gerador de indução duplamente excitado - DFIG. O presente trabalho permite con-tribuições para que haja uma continuidade nessa direção, tendo em vista que:
• Levantamentodo bibliográfico sobre essa topologia já realizado;
• Base experimental concluída para implementação do DFIG;
• Estudo do sistema montado já realizado, tanto como retificador quanto para o
ANEEL, Agência Nacional de Energia elétrica,“Atlas de Energia Elétrica do Brasil", 3a edição, Brasília 2008.
AREDES et al (1997), Maurício Aredes, J¨urgen H¨afner, and Klemens Heumann,
“Three-Phase Four-Wire Shunt Active Filter Control Strategies", IEEE Trans. on Power Eletronics, vol. 12, no. 2, Mar 1997, pp 311-318.
AKAGI (1999), Hirofumi Akagi, Satoshi Ogasawara, and Hyosung Kim, “The Theory of Instantaneous Power in Three-Phase Four-Wire System: A comprehensive Approach", 1999, pp.1-9.
AKAGI (1996), AKAGI,H. New trends in active Filters for power conditioning, IEEE Trans. Ind. Applicat., vol. 32, no. 6, pp. 13121322, Nov./Dec. 1996.
AKAGI (1990), Hirofumi Akagi, Yukifumi Tsukamoto, and Akira Nabae,“Analysis and Design of an Active Power Filter Using Quad-Series Voltage Source PWM Converters", IEEE Trans. on Industry Applications, vol. 26, no. 1, Jan./Feb. 1990, pp.93-98.
AKAGI et al (1983), Akagi, H., Kanazawa, Y., and Nabae, A. “Generalized Theory of the Instantaneous Reactive Power in Three-Phase Circuits", Proceedings of the IPEC’83, 1983, pp.1375-1386.
BARBI (1985) Barbi, Ivo, “Teoria Fundamental do Motor de Indução, Ed. da UFSC, Eletrobrás, 1985.
BAZZO (2007), BAZZO, T. P. M. “Implementação de Controle Vetorial em Geradores Assíncronos", Dissertação de Mestrado, UFSC, 2007.
BOTTERÓN et al (2001), Fernando Botterón, Humberto Pinheiro, Hilton A. Gründling, José R. Pinheiro, and Hélio L. Hey,“Digital Voltage and Current Controllers for Three-Phase PWM Inverter for UPS Applications", IEEE 2001, pp.2667-2674.
CAMARGO (2002), R. F. de Camargo, “Contribuição ao Estudo de Filtros Ativos de Potência", Dissertação de Mestrado, PPGEE, Universidade Federal de Santa Maria, Julho de 2002.http://www.ufsm.br/gepoc.
CAMARGO et al (2005) Robinson F. de Camargo, Marcelo Hey Duarte, Fernando Bot-terón, Humberto Pinheiro, and Jéferson Marques, “Análse e Implementanção de Reti-ficadores PWM Trifásicos com Resposta de Tempo Mínimo Utilizando Desaclopamento por Retroação de Estados", Revista Controle Automação, vol. 16, no. 4, Dec. 2005, pp.503-513.
CAMPOS et al (1994), Alexandre Campos, Geza Joos, Phoivos D. Ziogas, and James F. Lindsay,“Analysis and Design of a Series Voltage Unbalance Compensator Based on a Three-phase VSI Operating With Unbalanced Switching Functions", IEEE Trans. on Power Eletronics, vol. 9, no. 3, May 1994, pp.269-274.
CARAVILHA et al (2008), Gonzalo Casaravilla, Gabriel Eirea, Gabriel Barbat, Jos´e Inda and Fernando Chiaramello,“Selective Active Filtering for Four-Wire Loads: Control and Balance of Split Capacitor Voltages", IEEE, 2008, pp 4636-4642.
CARDONER et al (2007), Rafael Cardoner, Robert Griñó, Ramon Costa-Castelló, and Enric Fossas, “Digital Repetitive Control of a Three-Phase Four-Wire Shunt Active Fil-ter", IEEE Trans. Ind. Electron, vol. 54, no. 3, Jun 2007, pp 1495-1503.
(CEI/IEC), “IEC 61000-3-2 International Standard". International Eletromechanical Commission, 1998.
(CEI/IEC), “IEC 61000-3-3 International Standard". International Eletromechanical Commission, 2008.
(CEI/IEC), “IEC 61000-3-4 International Standard". International Eletromechanical Commission, 1998.
CHEN et al (2002), Z. Chen, F. Blaabjerg and J. K. Pedersen,“A Study of Parallel Oper-ations of Active and Passive Filters", IEEE, 2002, pp 1021-1026.
DAS (2004), DAS, J. C.“Passive FiltersPotentialities and Limitations", IEEE Trans. on Industry Applications, vol. 40, no. 1, Jan/Feb 2004, pp.232-241.
FERREIRA (2005), FERREIRA, J. C. C.“Aplicação do Controle Vetorial e Teoria PQ no Controle de Aerogeradores Conectados à Rede Elétrica", Dissertação de Mestrado, UFRJ, 2005.
FUGIKA et al (2005), Hideaki Fujita, Takahiro Yamasaki, and Hirofumi Akagi,“A Hy-brid Active Filter for Damping of Harmonic", IEEE Transactions on Power Electronics, vol. 15, no. 5, Mar 2005, pp.215-222.
GHENNAM et al (2009), T. Ghennam, E.M.Berkouk, and B.François, “Modeling and Control of a Doubly Fed Induction Generator (DFIG) Based Wind Conversion System", IEEE, March 2009, pp.507-512.
GRAOVAC et al (2007), Dusan Graovac, Vladimir A. Katic´, and Alfred Rufer, “Power Quality Problems Compensation With Universal Power Quality Conditioning System", IEEE Trans. on Power Delivery, vol. 22, no. 2, April 2007, pp 968-976.
(IEEE), “IEEE 519 Recommended Pratices and Requirements for Harmonic Control in Electrical Power Systems". IEEE Std., 1993.
JACOBINA et al (2008), C. B. Jacobina, A. C. Oliveira, R. R. Matias, A. P. D. Queiroz,
“Three-Phase Series Active Power Filter Without DC Voltage Source", IEEE, 2008, pp 880-884.
LINDEKE et al (2004), Dirk Lindeke, Samir Ahmad Mussa, Fabiana Pottker de Souza and Ivo Barbi, “Single Phase Active Power Filter Controlled with a Digital Signal Pro-cessor - DSP", IEEE Power Electronics Specialists Conference, 2004, pp 124-127. GHARTEMANI IRAVANI (2004), Masoud Karimi-Ghartemani, and M. Reza Iravani,
“A Method for Synchronization of Power Electronic Converters in Polluted and Variable-Frequency Environments", IEEE Trans. on Power Systems, vol. 19, no. 3, Aug. 2004, pp.1263-1270.
MASSOUD et al (2007), Ahmed M. Massoud, Stephen J. Finney, Andrew J. Cruden, and Barry W. Williams, “Three-Phase, Three-Wire, Five-Level Cascaded Shunt Active Fil-ter for Power Conditioning, Using Two Different Space Vector Modulation Techniques", IEEE Trans. on Power Delivery, vol. 22, no. 4, Oct 2007, pp 2349-2361.
MILFONT (2010), Marcos Vinícius Milfont de Aguiar, “Proposta de um Compensador de Reativos Aplicado à um Gerador de Indução utilizando Técnicas de Controle Digital", Dissertação de Mestrado, UFRN, 2010.
MIRET et al (2004), Jaume Miret, Luis Garcia de Vicuxia, Miguel Castilla, Juan Cruz and Josep M. Guerrero, “A Simple Sliding Mode Control of an Active Power Filter", IEEE, 2004, pp.1052-1056.
(MME), Ministério de Minas e Energia,“Atlas do Potencial Eólico Brasileiro", Brasília 2001.
MUTSCHLER MEINHARDT (1998), P. Mutschler, and M.Meinhardt, “Competitive hysteresis controllers - a control concept for inverters having oscillating DC- and AC-side state variables", IEE Transactions on Power Applications, vol. 145, no. 6, Nov. 1998, pp.569-576.
NUNES (2003), NUNES, M. V. A.“Avaliação do Comportamento de Aerogeradores de Velocidade Fixa e Variável Integrados em Redes Elétricas Fracas", Tese de Doutorado, UFSC, 2003.
OLIVEIRA (2006), C. B. M. “Desenvolvimento de Modelos no Programa DigSILENT PowerFactoryTM para o Estudo de Estabilidade Transitória em Sistemas Elétricos de Potência com Aerogerador", Dissertação de Mestrado, UFRN, 2006.
PEREIRA (2004), Pereira, M. M. “Um Estudo do Aerogerador de Velocidade Variável e Sua Aplicação para Fornecimento de Potência Elétrica Constante", Dissertação de Mestrado, UFJF, 2004.
PEREIRA (2009), Luciano Pereira dos Santos Júnior, “Uma Fonte Chaveada de 50kW Com Correção de Fator de Potência Para Alimentação de Uma Tocha de Plasma Indutiva Utilizando Técnicas de Controle Digital", Dissertação de Mestrado, UFRN, 2009.