Propriedade de Bernoulli para bilhares
hiperbólicos com fronteiras focalizadoras
quase planas.
Rodrigo Manoel Dias Andrade
Tese apresentada
ao
Instituto de Matemática e Estatística
da
Universidade de São Paulo
para
obtenção do título
de
Doutor em Ciências
Programa: Matemática Aplicada
Orientador: Prof. Dr. Rodrigo Bissacot
Co-orientador: Prof. Dr. Roberto Markarian
Durante o desenvolvimento deste trabalho o autor recebeu auxílio financeiro da CAPES
Propriedade de Bernoulli para bilhares hiperbólicos
com fronteiras focalizadoras quase planas.
Propriedade de Bernoulli para bilhares hiperbólicos
com fronteiras focalizadoras quase planas.
Esta versão da tese contém as correções e alterações sugeridas pela Comissão Julgadora durante a defesa da versão original do trabalho, realizada em 09/10/2015. Uma cópia da versão original está disponível no Instituto de Matemática e Estatística da Universidade de São Paulo.
Comissão Julgadora:
• Prof. Dr. Roberto Markarian (co-orientador) - Universidad de la República • Prof. Dr. Fábio Tal - IME-USP
• Prof. Dr. Ricardo dos Santos Freire Jr - IME-USP • Prof. Dr. Rodrigo Bissacot Proença - IME-USP • Profa
. Dra
Dedicatória
Agradecimentos
Primeiramente, agradeço a Deus por me conduzir às pessoas certas para a realização deste tra-balho. Em particular, ao Rodrigo Bissacot pela sua orientação, dedicação e disponibilidade desde o início do meu doutorado. Ao Roberto Markarian, pelo convite ao Uruguai, onde quase toda parte do trabalho foi desenvolvida lá sob sua supervisão, paciência e hospitalidade.
Aos meus pais Manoel e Inês, por estarem sempre presente pessoalmente ou via skype nos mo-mentos que eu mais precisei. Sem o carinho e incentivo de vocês, esse trabalho nada seria. Família é tudo!
Ao meu irmão e amigo de quarto Plinio, pela convivência e conselhos ao longo desses anos.
À minha irmã pelo amor e apoio incondicional.
À minha namorada Juliana por saber entender o que é a vida de um doutorando.
Ao meu amigo de instituto Edgardo, muito obrigado pelo apoio e amizade.
Um agradecimento especial é devido também aos membros da banca examinadora pelas suges-tões e correções do texto.
Ao grupo de Investigação CSIC-Universidad de la República “Sistemas Dinâmicos” pelo apoio financeiro em Montevideo.
À CAPES pelo apoio financeiro no Brasil e Uruguai.
Resumo
Dias Andrade, R. M.Propriedade de Bernoulli para bilhares hiperbólicos com fronteiras focalizadoras quase planas. 2015. 120 f. Tese (Doutorado) - Instituto de Matemática e Estatís-tica, Universidade de São Paulo, São Paulo, 2015.
Neste trabalho, mostramos que os bilhares hiperbólicos construídos originalmente por Bussolari-Lenci têm a propriedade de Bernoulli. Tais bilhares não satisfazem as técnicas standard de Wojtkowski-Markarian-Donnay-Bunimovich para bilhares focalizadores hiperbólicos, a qual requer que o diâme-tro da mesa do bilhar seja de mesma ordem que o maior raio de curvatura ao longo da componente focalizadora. Nossa prova, utiliza um teorema ergódico local que nos diz que sob certas condições, existe um conjunto de medida total do espaço de fase do bilhar tal que cada ponto desse conjunto possui uma vizinhança contida (mod 0)em uma componente Bernoulli da aplicação do bilhar.
Palavras-chave: Bilhares hiperbólicos, Ergodicidade, Propriedade de Bernoulli.
Abstract
Dias Andrade, R. M.Bernoulli property for hyperbolic billiards with nearly flat focusing boundaries. 2015. 120 f. Tese (Doutorado) - Instituto de Matemática e Estatística, Universidade de São Paulo, São Paulo, 2015.
In this work, we show that hyperbolic billiards constructed originally by Bussolari-Lenci has the Bernoulli property. These billiards do not satisfy the standard Wojtkowski-Markarian-Donnay-Bunimovich technique for the hyperbolicity of focusing or mixed billiards in the plane, which requires the diameter of a billiard table to be of the same order as the largest ray of curvature along the focusing boundary. Our proof employs a locally ergodic theorem which says that under a few con-ditions, there exists a full measure set of the billiard phase space such that each of its points has a neighborhood contained, up to a zero measure set, in one Bernoulli component of the billiard map.
Keywords:Hyperbolic Billiards, Ergodicity, Bernoulli property.
Sumário
Lista de Símbolos xi
Lista de Figuras xiii
1 Introdução 1
2 Preliminares 5
2.1 Domínio do bilhar. . . 5
2.2 Espaço de fase. . . 5
2.3 Aplicação do bilhar. . . 6
2.4 Conjunto de singularidades. . . 6
2.5 Campos de cone e tempos de focalização . . . 7
2.6 Formas quadráticas . . . 9
2.7 Diferencial de F . . . 10
3 Hiperbolicidade. 13 4 Ergodicidade Local. 17 4.1 Método de Hopf. . . 17
4.2 Principais resultados . . . 18
4.3 Ergodicidade local . . . 19
4.3.1 Condição L1 - Regularidade . . . 20
4.3.2 Condição L2 - Alinhamento . . . 23
4.3.3 Condição L3 - Sinai-Chernov ansatz . . . 24
4.3.4 Condição L4 - Contração . . . 33
4.3.5 Campos de Jacobi e semi-normas.. . . 33
4.3.6 Blocos de decomposição. . . 36
4.3.7 Provando a propriedade de não contração. . . 37
4.3.8 Conclusão da prova de L4. . . 42
A Teorema da Decomposição Espectral 45
Referências Bibliográficas 47
Lista de Símbolos
Ω Domínio do bilhar
∂Ω Fronteira deΩ
Γi i-ésima componente de∂Ω
K Curvatura da componente
M Espaço de fase
F Mapa do bilhar
R±k Conjuntos singulares de F±k
{C(x)}x∈U Campo de cone
F± Pontos focais
f± Distâncias focais relativos aos pontos F± DxF Diferencial deF no ponto x
σ(DxFk) Taxa de expansão gerada pela ação da derivada DFk
Dβ Disco fechado de raio1/|βK|
Vs Variedade estável local
Vu Variedade instável local
J(t) Campo de Jacobi
Lista de Figuras
2.1 A reta tangente t(s) e alguns discos Dβ(s). A parte amarela da trajetória é o lugar
geométrico dos pontos focaisF+ correspondendo a um certo cone. . . . 11
2.2 Uma representação geométrica da Proposição 1. A figura da esquerda representa as duas primeiras equivalências (componente focalizadora). Os conjuntos amarelo/azul de pontos focaisF− são mapeados em conjuntos amarelo/azul de pontos focaisF+.. 12
3.1 A mesa de bilhar estudada em [BL08]. . . 14
3.2 Condição 3 para duas escolhas de s′. . . . 14
4.1 Uma cadeia de Hopf conectando x e y. . . 17
4.2 A principal mesa de bilhar. . . 18
4.3 Prova da Proposição 2. . . 19
4.4 Γ1 eΓ2 no sistema de coordenadas cartesianas(X, Y). . . 21
Capítulo 1
Introdução
Um bilhar planar é o sistema mecânico consistindo de um ponto material movendo livremente no interior de um domínio conexo Ω ⊂R2 com fronteira diferencial por partes, e refletindo sobre
∂Ωde modo que o ângulo de incidência é igual ao ângulo de reflexão.
O estudo das dinâmicas desordenadas no bilhar está diretamente relacionado com a conhecida Hipótese Ergódica de Boltzmann formulada há mais de cem anos pelo físico alemão Ludwing Boltz-mann. Tal Hipótese é parte de um modelo mecânico para explicar as propriedades dos gases.
As características específicas dos bilhares aparecem quando o papel da fronteira (curvatura, posição relativa, etc.) é muito mais importante que o da variedade subjacente. Algumas questões interessantes surgem ao estudar os bilhares, como por exemplo: a partícula visita as vizinhanças de todos os pontos da fronteira? Para qualquer ponto inicial, a trajetória de uma partícula é densa no espaço de fase da transformação? O que podemos dizer sobre a ergodicidade desses sistemas? Propriedades como mistura, Kolmogorov (propriedade K) ou Bernoulli implicam em ergodicidade e, portanto, são propriedades fortemente estudadas na teoria de bilhares.
Nesse trabalho, iremos nos concentrar nos bilhares hiperbólicos construídos por Bussolari-Lenci [BL08], isto é, um tipo particular de bilhar cujo mapa possui expoentes de Lyapunov não nulos.
A teoria matemática de bilhares hiperbólicos foi iniciada por Sinai. Em [Sin70], Sinai mostrou que a aplicação do bilhar de um sistema em um toro bidimensional com uma quantidade finita de obstáculos convexos (curvatura positiva) é hiperbólico e K-automorfismo e, portanto, misturador com respeito a sua medida natural finita. Neste, é utilizado o chamado método de Hopf, que consiste na prova de ergodicidade de um sistema a partir da existência de variedades estáveis e instáveis absolutamente contínuas. Gallavotti e Ornstein [GO74] provaram que o bilhar de Sinai também é Bernoulli. Pouco depois, Bunimovich provou que bilhares em alguns domínios com fronteira formada por arcos convexos focalizadores e segmentos de retas, são também hiperbólicos [Bun74,Bun79]. O mais importante exemplo de um bilhar de Bunimovich é o estádio, a região limitada por dois semi-círculos conectados por segmentos paralelos. As únicas componentes focalizadoras admissíveis em bilhares de Bunimovich são os arcos de círculo. Essa limitação foi resolvida por Wojtkowski, Marka-rian, Donnay e Bunimovich. Usando novas técnicas para estabelecer a positividade de expoentes de Lyapunov [Woj86,Mar88], eles provaram independentemente, que vários outros arcos focalizadores podem ser usados para construir bilhares hiperbólicos [Woj86,Mar88,Bun90b,Don91].
As hipóteses da teoria standard de bilhares hiperbólicos de Wojtkowski, Markarian, Donnay e Bunimovich ([CM06], Teo. 9.19) requer que os círculos de semi-curvatura em qualquer ponto de uma componente focalizadora não deve intersectar outras componentes, ou o círculo de semi-curvatura relativo à outras componentes focalizadoras (em [Mar88] tem uma condição similar). Tal condição é requerida para aplicar o chamado mecanismo de desfocagem, que pode ser descrito da seguinte
2 INTRODUÇÃO 1.0
forma: deseja-se um feixe divergente de trajetórias para manter-se divergente após cada colisão com a fronteira. Mas em uma porção focalizadora da fronteira, um feixe divergente pode ser rebatido como um feixe convergente. Uma maneira de contornar esse problema, é deixar viajar intacto um feixe convergente por um tempo suficientemente longo até as trajetórias concentrar-se em si e, em seguida, começarem a divergir novamente.
O mecanismo de desfocagem provém da óptica geométrica, porém há formulações analíticas se-melhantes na literatura, veja [Mar88,Mar93]. Tal mecanismo, é a extensão mais próxima da original idéia de Sinai de extrair hiperbolicidade das características de fronteiras dispersoras [Sin70].
Entre bilhares de Sinai e Bunimovich, somente casos especiais dos bilhares hiperbólicos restan-tes foram provados ser ergódicos [LW86, MM13a, Bun90a, CT98, Mag01, Mar93, Szá92]. Nosso principal objetivo é mostrar que os bilhares iniciados por Bussolari-Lenci [BL08], os quais não se aplica a teoria standard de bilhares hiperbólicos de Wojtkowski, Markarian, Donnay e Bunimovich, tem a propriedade de Bernoulli (ou equivalentemente, dizemos ‘Bernoulli’ ), isto é, isomorfo a um shift de Bernoulli. A propriedade de Bernoulli está no topo da hierarquia ergódica: ela implica K-propriedade, mixing e ergodicidade. Foi mostrado que vários bilhares, incluindo os bilhares de Sinai e Bunimovich, tem a propriedade de Bernoulli [LW86,Bun90a,CT98,Mag01,Mar93,Szá92,MM03]. Recentemente, Del Magno-Markarian [MM14] provaram que para uma grande classe de bilhares hi-perbólicos satisfazendo certas condições, têm a propriedade de Bernoulli. Notavelmente, essa classe inclui os bilhares hiperbólicos construídos por Donnay [Don91]. Para o nosso conhecimento, to-dos os bilhares hiperbólicos 2-dimensional cumprem tais condições com a exceção de dois casos [BL08,BM99]. Nosso principal objetivo é provar que, os bilhares em [BL08] são localmente ergódi-cos e têm a propriedade de Bernoulli.
Um passo central na prova da ergodicidade de um bilhar hiperbólico é mostrar que é localmente ergódico, isto é, todas as suas componentes ergódicas de medida positiva são abertas (mod 0). Resultados desse tipo são chamados de Teoremas Ergódicos Local (LETs). Em [MM13a], foi pro-vado que sob certas condições, simplectomorfismos hiperbólicos com singularidades são localmente ergódicos. Esse resultado generaliza um teorema ergódico local de Liverani e Wojtkowski para si-tuações quando o sistema admite um campo de cone invariante contínuo por partes ao invés de contínuo em toda parte [LW86]. Ambos teoremas, são baseados nas idéias e métodos de Sinai. Ele obteve o primeiro teorema ergódico local para bilhares [Sin70], usando uma versão probabilística do argumento devido a E. Hopf para demonstrar a ergodicidade de fluxos geodésicos em superfícies compactas de curvatura negativa [Hop39]. Outros refinamentos do teorema de Sinai foram obtidos em [LW86,CH96,KSS90,SC87].
O teorema ergódico local que iremos aplicar nesse trabalho é o mesmo em [MM13a] que também pode ser encontrado em [MM14] com as devidas modificações, ou seja, iremos verficar todas as suas condições (chamadas de L1-L4). Esse é o principal foco do trabalho. Todas as hipóteses se refere às propriedades da dinâmica próximas ou sobre o conjunto de singularidades R+k (resp. R−k) com
k ∈ N do espaço de fase consistindo de elementos cujo k-ésimo (resp. −k-ésimo) iterado atinge
um vértice do domínio do bilhar ou possui uma colisão tangencial com a fronteira do domínio. A condição L1 requer que os conjuntos R±k seja uniões finitas de subvariedades C2 do espaço de
fase do bilhar. Já a condição L2 requer que os espaços tangentes à R+
k (resp. R−k) estejam
1.0 3
Capítulo 2
Preliminares
Um sistema de bilhar pode ser descrito ou por um fluxo ou por uma transformação. Nesse trabalho, iremos nos concentrar na transformação do bilhar. Para a relação entre a transformação do bilhar e o fluxo do bilhar, recomendamos ao leitor a referência [CM06]. Nessa seção, iremos definir a transformação do bilhar para um domínio 2-dimensional, veja [CM06]. Observe que há diferenças entre as parametrizações de ângulo e a orientação das distâncias focais nos trabalhos [BL08] e [CM06].
2.1
Domínio do bilhar.
Um subconjunto Γ⊂R2 é chamado um arco de classe Ck com k ≥0 se Γ é a imagem de um
homeomorfismo (sobre sua imagem)γ : [0,1]→R2 de classe Ck. A fronteira de um arco Γ é dada
por ∂Γ =γ(0)∪γ(1). Um subconjuntoΓ⊂R2 é chamado umacurva fechada de classe Ck seΓ é
difeomorfo ao círculo unitárioS1. Vemos que ∂Γ =∅seΓ é uma curva fechada.
Seja Ω ⊂ R2 um aberto conexo e limitado, a qual chamamos de mesa do bilhar. Assumimos
que ∂Ω é uma união finita de curvas fechadas de classe C0 disjuntas. Também assumiremos que
Γ := ∂Ω = Sn
i=1Γi com n > 0 e Γi sendo ou um arco de classe C3 ou uma curva fechada de
classe C3. Denotemos por L
i o comprimento da componente Γi. Consideremos a parametrização
γi: [0, Li]→R2deΓipelo comprimento de arco com a propriedade de que o interior deΩpermaneça
do lado esquerdo do vetor tangente γi′(s)paras∈[0, Li]. Assumiremos também que:
• a curvatura de Γi, calculada com respeito a parametrização γi, poderá ser somente
estrita-mente negativa, estritaestrita-mente positiva ou identicaestrita-mente igual a zero,
• Γi∩Γj ⊂∂Γi∩∂Γj parai6=j,
• o conjunto de pontos onde∂Ωnão é C3 é exatamente Sn
i=1∂Γi.
Os conjuntosΓ1, . . . ,Γnsão chamados decomponentes de∂Ω. A união de todas as componentes
com curvatura positiva (componentes focalizadoras), curvatura negativa (componentes dispersoras) e curvatura zero (componentes flat) são denotadas por Γ+,Γ− e Γ0, respectivamente. Vemos que uma componente flat é um segmento de reta. Um ponto de Sn
i=1∂Γi := Γ∗ é chamado de vértice de ∂Ω e um ponto de∂Ω\Γ∗ := ˜Γé chamado de ponto regular de fronteira.
2.2
Espaço de fase.
Para cada i= 1, . . . , n defina Mi := [0, Li]×[−π/2, π/2] com elementos (0, α) e (Li, α)
iden-tificados quando Γi é uma curva fechada. Segue que Mi é um retângulo ou um cilindro. Assim,
M=∪iMi é identificado com o retângulo[0, L]×[−π/2, π/2], ondeL=Pni=1Li é o comprimento
total de ∂Ω. Um elemento x ∈ M é, portanto, um par ordenado (i,(s, α)), o qual é chamado de um estado ou uma colisão. Definimos i(x) = i, s(x) = s e α(x) = α para x = (i,(s, α)) ∈ M.
6 PRELIMINARES 2.4
Para simplificar a notação, identificamos cada x ∈ M com o correspondente par (s, α) omitindo (salvo exceções) o índice i da representação (i,(s, α)). Quando necessitarmos especificar i escre-vemos ‘x ∈ Mi’. Dado x = (s, α) ∈ Mi, defina q(x) = γi(s) ∈ Γi e u(x) o vetor unitário de
R2 apontando para dentro da mesa do bilhar. O conjunto M é uma variedade diferenciável com
fronteira ∂M = Sn
i=1∂Mi. Também, identificaremos o espaço tangente TxM com R2 tal que se
v ∈TxM, então v = (ds, dα). Denotemos porM+,M− e M0 a união de todos os conjuntos Mi
comΓi sendo focalizadora, dispersora ou flat, respectivamente.
Equipamos M com a métrica Riemanniana g = {gx}x∈M e a forma simplética ω = {ωx}x∈M dada porgx =ds2+dα2 eωx = cosα(x)ds∧dαparax∈ M. A norma gerada porgé denotada por
k · k. A métrica Riemannianaginduz uma distância usual dem cadaMi, a qual pode ser estendida
em todo M colocando d(x, y) = 1 sempre que x ∈ Mi e y ∈ Mj com i 6= j. Denotemos por m
a medida volume gerada por g. Assim, µ= (2L)−1cosα(x)m é a medida de probabilidade gerada porω. Dados A ⊂ Meǫ >0, sejaA(ǫ) ={y∈ M:d(y,A)< ǫ} aǫ-vizinhança deA.
Observamos que existe uma involução naturalI :M → Mdada porI(s, α) = (s,−α)para cada
(s, α)∈ Mi. Para efeito de notação, iremos escrever−x ao invés deI(x). Se B é um subconjunto
de M, então −B será denotado por{−x:x∈B}.
2.3
Aplicação do bilhar.
Sejax= (s, α)∈ Mie definaρ(x) ={t >0 : (q(x), q(x)+tu(x))⊂Ω}, onde(q(x), q(x)+tu(x))
é um segmento aberto de R2 com extremidades q(x) e q(x) +tu(x). Defina também, τ(x) = 0 se
ρ(x) = 0, eτ(x) = supρ(x)caso contrário, e q1(x) =q(x) +τ(x)u(x). Seja
M′ ={x∈ M:q1(x) não pertence a um vertice de∂Ω}.
Se x ∈ M′, então existe um único i
1(x) tal que q1(x) pertence ao interior de Γi1(x). Portanto, podemos definir s1(x) =γi−11(x)(q1(x)). Considere,
u1(x) =u(x)−2hγi′′1(x)(s1(x)), u(x)iγi′′1(x)(s1(x)),
onde h·,·idenota o produto escalar emR2. Denotemos porα1(x)∈[−π/2, π/2]o ângulo orientado
(no sentido horário) entreu1(x) e o vetor normalγ′′i1(x)(s1(x))apontando para dentro da mesa. A aplicação do bilhar para o domínioΩé a transformação F :M′→ Mdada por
Fx= (i1(x),(s1(x), α1(x))) parax∈ M′.
Notamos que tal transformação não é diferenciável: existem pontos de M′, chamados de pontos singulares para os quaisF não é contínua ou duas vezes difrenciável. Daremos agora uma descrição detalhada desses pontos.
2.4
Conjunto de singularidades.
Defina,A1 = {x∈ M:sestá em um vértice de ∂Ω},
A2 = {x∈ M:α∈ {−π/2, π/2}},
A3 = {x∈ M \∂M:s1 está em um vértice de ∂Ω},
A4 = {x∈ M \(∂M ∪A3) :Fx∈A2}.
Vemos que∂M=A1∪A2. Defina também,S1+=A3∪A4eS1− =−S1+, e para cadak≥1, defina iterativamente S+
2.5 CAMPOS DE CONE E TEMPOS DE FOCALIZAÇÃO 7
O conjunto R+k contém os pontos de M onde Fk ou não está definido ou não é duas vezes
diferenciável. Analogamente, o conjuntoR−k contém on pontos deMonde ouF−knão está definido
ou não é duas vezes diferenciável. Os conjuntosR+
k eR−k são chamados deconjuntos singulares de
Fk eF−k respectivamente.
Sob as hipóteses acima F : M \ R+1 → M \ R−1 é uma aplicação com singularidades, do tipo estudada por Katok e Strelcyn em [KS86]. Nesse mesmo trabalho, é mostrado que F é um
C2 difeomorfismo que preserva a forma simplética ω e a medida de probabilidade µ (veja [KS86], Corolários 4.1 e 4.4, Part V). Para os bilhares considerados nesse trabalho, mostraremos (veja Subseção4.3.1) que os conjuntosR+
k eR−k são uniões finitas de arcos de classeC2que se intersectam
somente nas extremidades. Assim, com essa propriedade e da invariância de µ segue queµ(R+k) = µ(R−k) = 0para cadak≥1. Finalmente, observamos queFé tempo-reversível, isto é,I◦F =F−1◦I
emM \ R+ 1.
Seguindo [MM14], definimos os seguintes conjuntos:
• R±∞:= S
k≥1R±k,
• R:=R−
∞∩ R+∞, • N±:={x∈ M \ R±
∞:∃k >0 tal que F(±)nx∈ M0 ∀n≥k}, • N :=N−∩ N+,
• N′ := (R−
∞∩ N+)∪(R+∞∩ N−).
Observação 1. O significado geométrico dos conjuntos anteriores é: R+
∞ (resp. R−∞) é o conjunto de colisões com semi-órbita finita positiva (resp. negativa); R é o conjunto de colisões com órbita finita; N+ (resp. N−) é o conjunto de colisões com semi-órbita positiva (resp. negativa) visitando certamente somente componentes flat de ∂Ω; N é o conjunto de colisões com ambas semi-órbitas visitando certamente somente componentes flat de ∂Ω; N′ é o conjunto de colisões com uma semi-órbita sendo finita e a outra semi-semi-órbita visitando certamente somente componentes flat de ∂Ω.
Ainda entre os resultados de Katok e Strelcyn em [KS86] encontra-se uma versão do Teorema de Oseledec que garante para quase todo (s, α) :=x∈ M:
1. Uma decomposição do espaço tangenteTxMemEx+⊕Ex−. Esses espaços uni-dimensionais são
dinamicamente invariantes no sentido de (DF)xEx±=EF±x, onde(DF)x denota a diferencial
de F em x.
2. A existência de expoentes de Lyapunov λ±(x), definidos como
λ±(x) := lim
n→+∞
1
nlogk(DF
n) xv±k,
comv±∈Ex±. Comoµé absolutamente contínua com respeito a medida de Lebesgue em M,
então λ+(x) =−λ−(x). Adotaremos a convenção queλ+(x)≥0.
O sistema dinâmico, por definição, é hiperbólico se λ+(x)>0para quase todox∈ M. Se além disso, o sistema é ergódico, então λ+(x) =const:=λ+.
2.5
Campos de cone e tempos de focalização
Seguindo [Woj86,LW86], recordaremos as técnicas básicas de campos de cone invariante para a hiperbolicidade de bilhares planares. A invariância do campo de cone é também uma ferramenta muito útil nas provas da ergodicidade dos bilhares estudadas nesse trabalho. Restringiremos as presentes definições e propriedades dos campos de cone ao setting bidimensional.
Seja V um espaço vetorial bidimensional. Dados dois vetores linearmente independentes X1 e
8 PRELIMINARES 2.5
X1 e X2. Também definimos intC={a1X1+a2X2 :a1a2>0} ∪ {0}e C′(X1, X2) =C(X1,−X2), chamados interior deC(X1, X2) e cone complementar de C(X1, X2), respectivamente.
Agora, seja U um conjunto aberto de M, e suponhamos que X1 e X2 são dois campos de vetores mensuráveis emU tais queX1(x) eX2(x)são linearmente independentes para todox∈U. Um campo de cone C em U, denotado por (U, C), é uma família de cones {C(x)}x∈U dado por
C(x) =C(X1(x), X2(x))⊂TxM para cadax∈U. Um campo de cone (U, C)é chamado contínuo
se o campo de vetores X1 eX2 são contínuos em U. Um campo de cone (U, C) é dito:
• invariante(resp.estritamente invariante) seDxFC(x)⊂C(Fkx)(resp.DxFC(x)⊂intC(Fkx)),
parax∈U eFkx∈U com k >0.
• certamente estritamente invariante se é invariante, e para quase todox∈U, existe k(x)>0
tal que Fk(x)x∈U e D
xFk(x)C(x)⊂intC(Fk(x)).
O próximo teorema foi provado em [Woj85].
Teorema 1. Dada uma aplicação do bilhar F como descrita acima, se existe um campo de cone mensurável, definido para µ-quase todo ponto x ∈ M, que é certamente estritamente invariante, então o expoente de Lyapunov λ+(x) é positivo para µ-quase todox∈ M.
Notamos que para verificar a invariância dos cones no sentido acima, não precisamos conhecer
DxF em si, mas somente como a derivada age sobre as retas em TxM passando pela origem, isto
é, no espaço projetivo real 1-dimensional.
Aqui daremos algumas ideias de como Wojtkowski em [Woj86] mostrou que o expoente de Lyapunovλ+ pode ser de fato estimado inferiormente em termos projetivos.
Assuma que para (µ-q.t.p.) cada x ∈ M escolhamos uma coordenada projetiva t, −∞ ≤t ≤
+∞, no espaço projetivo 1-dimensional de retas em TxM (isto é, para coordenadas euclidianas
apropriadas(u1, u2)emTxMt, −∞< t <+∞corresponde à retau2 =tu1 et=±∞corresponde à retau1 = 0, ou seja, té a tangente de ângulo de u2 = 0 com a reta emTxM). As retas no cone
C(x) formam um intervalo fechado I(x) no espaço projetivo, I(x) = {t |l(x) ≤ t ≤ r(x)}, onde
l(x)< r(x). Se o campo de coneC(x),x∈ M, é invariante porF, então as retas no coneDxFC(x)
formam um sub-intervalo I1(x)de I(F(x)). SeI1(x) ={t |l1(x)≤t≤r1(x)}, l1(x)< r1(x), então temos µ-q.t.p. l(F(x))≤l1(x)< r1(x)≤r(F(x)). Seja N ={x∈ M | l(F(x))< l1(x) e r1(x) <
r(F(x))}, e para x ∈ N seja ζ(x) o cross ratio [l1(x), r1(x), l(F(x)), r(F(x))] dos quatro pontos, isto é,
ζ(x) = r(F(x))−l1(x) r(F(x))−r1(x) ·
r1(x)−l(F(x))
l1(x)−l(F(x))
. (2.1)
Vemos que ζ(x) > 1 para x ∈ N. ζ(x) não depende da escolha da coordenada projetiva t
mas somente dos cones C(F(x)) e DxFC(x). Heuristicamente, ζ(x) representa o quociente das
diferenças entre os limitantes (superior e inferior) dos campos de coneC(Fx) e DxFC(x).
Teorema 2. (Wojtkowski, [Woj86]) Se um campo de cone mensurável C(x), x∈ M, é invariante sobre F, então
Z
M
λ+dµ≥ Z
N
ln
√
ζ+ 1
√
ζ−1dµ,
onde N e ζ são definidos acima.
2.6 FORMAS QUADRÁTICAS 9
Para fins de notação, dada uma subvariedade B de M e um ponto x ∈ B, denotamos Tx∗B para
TxB\ {0}.
Seja x ∈ M. Para um vetor tangente v ∈ T∗
xM no espaço de fase é naturalmente associado
uma curva diferenciável ϕ: (−ǫ, ǫ)−→ Mtal queϕ(0) =xe ϕ′(0) =v. Por construção,σ 7→ϕ(σ)
é unicamente determinado na aproximação linear em torno de 0. Usando a representação de M como um subconjunto de Ω×S1, e a notaçãoϕ(σ) = (q(σ), u(σ))∈Ω×S1, construimos a família de retas, l+(σ) := {q(σ) +ru(σ)|r ∈ R}. Também denotando por u−(σ) o vetor pré-colisional de
u(σ) apontando para fora em q(σ) ∈ Γ, definimos l−(σ) := {q(σ) +ru−(σ)|r ∈ R}. Na primeira
aproximação, isto é, quando ǫ → 0+, o feixe infinitesimal de retas focaliza em um ponto, isso significa que todas as retas, até os ajustes de ordemǫem(q(σ), u(σ))tem uma interseção comum. Consideramos também o caso onde a interseção comum é no infinito. Esse ponto focal é claramente uma função de v somente: tal ponto é denotado por F+(v) para a família {l+(σ)} e F−(v) para a família {l−(σ)}. Denotamos porf±(v) as distâncias com sinal, ao longo de l±(0), entreF±(v) e
q0 =q(0)(l±(σ) possui orientação induzida pelo parâmetro r∈R, isto é, fora paral−(σ) e dentro paral+(σ), relativo a Ω). Daqui para frente, omitiremos a dependência de v de todas as notações sempre que não houver ambiguidade. Indicando por (ds, dα)as componentes de06=v∈TM(s0,α0)
na base natural {∂/∂s, ∂/∂α}, temos
f±=
cosα0 ±K(s0)−dαds
, ds6= 0
0, ds= 0
(2.2)
Aqui K(s) denota a curvatura deΓ no ponto de coordenada s, em que é positiva em pontos de componente focalizadora e negativa em pontos de componente dispersora. A fórmula em (2.2) pode ser encontrada em [Woj86].
Observação 2. Um cone bidimensional C pode ser naturalmente identificado com um intervalo fechado I do espaço projetivo P(V). Da mesma forma, intC e C′ são então identificados com o
interior deI e o intervalo fechadoP(V)\intI, respectivamente. Seja(U, C)um campo de cone com
U ⊂ M\A2. Parax∈U\A2, como os tempos de focalizaçãof+ ef−são transformações projetivas de TxM, existem dois intervalos fechadosI+(x) e I−(x) deR∪ {∞} tais que o cone C(x)∈TxM
pode ser convenientemente descrito de duas maneiras diferentes:
C(x) ={v∈Tx∗M:f+(v)∈I+(x)} ∪ {0}, ou
C(x) ={v∈Tx∗M:f−(v)∈I−(x)} ∪ {0}.
O próxima lema é conhecido na óptica como a equação do espelho [CM06,Woj86].
Lema 1. Para um feixe infinitesimal de trajetórias colidindo em torno do pontos∈Γ com ângulos de reflexão em torno de α, tem-se
− 1
f− +
1 f+ =
2K(s) cosα.
2.6
Formas quadráticas
Considere um campo de cone(U, C)gerado pelos campos de vetoresX1eX2. A forma quadrática
Q={Qx}x∈U associada à(U, C) é definida por
Qx(v) =ωx(v1, v2) para x∈U,
onde v1 e v2 são vetores dos subespaços gerados por X1(x) e X2(x), respectivamente, tal que
v=v1+v2.
10 PRELIMINARES 2.7
• monótona (resp. estritamente monótona) se QFkx(DxFkv) ≥Qx(v) (resp. QFkx(DxFkv) > Qx(v)) para todov∈Tx∗Msempre quex∈U e Fkx∈U comk >0.
• certamente estritamente monótona se é monótona, e para quase todox∈U, existe um inteiro
k(x)>0tal que QFk(x)x(DxFk(x)v)> Qx(v) para todo v∈Tx∗M.
Seguindo [LW86], definiremos agora a taxa de expansão gerada pela ação de DFk com k > 0
nos vetores em(U, C) com respeito a formaQ.
Definição 1. Seja C um campo de cone invariante definido em U, e seja Q a forma quadrática associada. Para cada x∈U e k >0 tal que Fkx∈U, seja
σC(DxFk) = inf v∈intC(x)
s
QFkx(DxFkv) Qx(v)
e
σC∗(DxFk) = inf v∈intC(x)
p
QFkx(DxFkv) kvk .
Parak <0, definimos σC e σC∗ substituindo o campo de cone na definição acima com o seu campo
de cone complementar C′(x) e −Q, respectivamente.
• O campo de cone (U, C) é invariante (resp. estrit. invariante) ⇐⇒ a forma quadrática Q é monótona (resp. estrit. monótona),
• (U, C)é certamente estritamente monótona ⇐⇒ Qé certamente estritamente monótona.
Além disso,DxFkC(x)⊂C(Fkx)(resp.DxFkC(x)⊂intC(Fkx)) parax∈U tal queFkx∈U
com k > 0 é equivalente à σC(DxF) ≥ 1 (resp. σC(DxF) > 1). Veja [LW86] para uma prova
detalhada dessas propriedades.
Das definições de invariância estrita de um campo de cone, σC e σ∗C, pode-se deduzir que se
k1, k2, n∈Zcomk1k2 ≥0, então
σC(DxFn)>1 =⇒σC∗(DxFn)>0, (2.3)
e
σ∗C(DxFk1+k2)≥σC∗(DxFk1)·σC(DFk1xFk2). (2.4) Definição 2. Sejan(x) = sup{j≥0 :x∈ M \ R+j e x,Fx, . . . ,Fjx∈ M
i(x)} para x∈ M \A2, onde R+0 :=∅. Se x∈ M−, observamos que n(x) = 0.
O número n(x) é sempre finito, e representa o número de colisões consecutivas da trajetória de
x com a componenteΓi(x)⊂Γ+ antes de deixá-la.
Definição 3. Dada Γi ⊂Γ+, defina Ei ={x∈ Mi\A2 :n(−x) = 0}. Também, sejaE+ a união de todos os E′
is.
Vemos que, se x ∈ Ei então {x,Fx, . . . ,Fn(x)x} é a maior sequência de colisões consecutivas
comΓi; qualquer outra colisão que antecedex deverá pertencer àMj comj6=i.
2.7
Diferencial de
F
Identificaremos a diferencial de DxF com a diferencial da transformação(s, α)7→(s1, α1). Para cadax∈ M \ R+1 a matriz da diferencial DxF é dada por (veja [CM06]):
DxF =−
1 cosα1
−τK+ cosα τ
τKK1− Kcosα1− K1cosα −τK1+ cosα1
2.7 DIFERENCIAL DEF 11
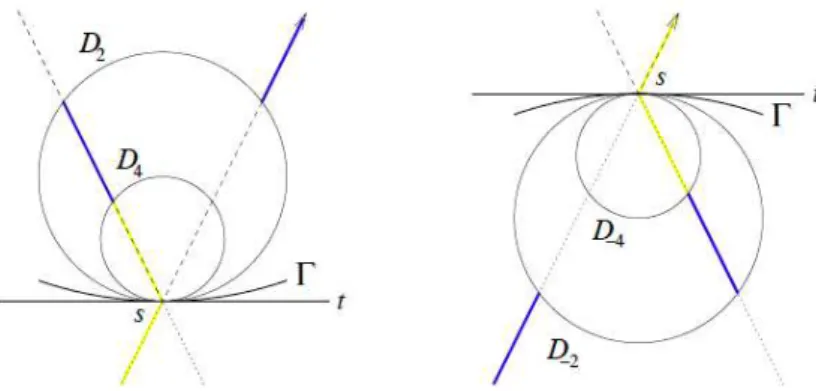
Apresentaremos agora, uma descrição visual do cone C(x) =C(s, α) no plano de configuração contendoΩque foi construído em [BL08]. Para s∈∂Ωe β >0, denotamos porDβ o disco fechado
de raio1/|βK(s)|tangente à∂Ωemssobre o lado externo deΩ. Considere também, dois semiplanos fechados delimitados port(s), a reta tangente à∂Ωems: sejaD0+(s)o semiplano interno, relativo à Ω, e D0−(s)o externo. Veja Figura 2.1. O interior de Dβ é indicado comD◦β(s).
Figura 2.1: A reta tangentet(s)e alguns discosDβ(s). A parte amarela da trajetória é o lugar geométrico dos pontos focaisF+ correspondendo a um certo cone.
Os próximos resultados bem como suas respectivas provas podem ser encontrados em [BL08]. Lema 2. Dado um campo de cone C(s, α) como na Subseção 2.5, v ∈ C(s, α) corresponde à
F+(v)∈l+(0)∩D, ondeD⊂R2 é um dos seguintes conjuntos:
(a) D=Dβ1(s), para algumβ1 ∈R; (b) D=Dβ1(s)\D
◦
β2(s), para alguns β1, β2 ∈R com |β1|<|β2|; (c) D=Dβ1(s)∪Dβ2(s), para alguns β1, β2 com β1 ≥0 e β2 ≤0; (d) D=R2\(D◦
β1(s)∪D ◦
β2(s)∪ {s}), para alguns β1, β2 com β1 ≥0 e β2≤0. Além disso, F+(v)∈∂Dβ(s)\ {s} ⇐⇒f+(v) =
2 cosα β|K(s)|.
Veremos que descrevendo os cones em termos dos discos Dβ(s) será eliminada a dependência
sobre α na equação do espelho no Lema1.
Lema 3. Para um feixe infinitesimal de trajetórias colidindo em torno des∈∂Ω,F−∈∂D
β(s)se,
e somente, seF+∈∂Dβ′(s), ondeβ′= 4 sgn(K(s))−β(em queF±∈∂D0±significaF±∈ {s,∞}).
Com as ferramentas da Subseção 2.5, o problema da invariância do campo de cone ao longo de uma dada trajetória pode ser reduzida ao estudo de pontos focais de perturbações a um parâmetro dessa trajetória.
A proposição a seguir será útil em nossa prova.
Proposição 1. Para um feixe infinitesimal de trajetórias colidindo em torno de s, temos: Se s∈
M+, então: • F∓∈D
4(s)⇐⇒F±∈D0−(s);
• F∓∈D2(s)\D4◦(s)⇐⇒F±∈D0+(s)\D◦2(s). Ses∈ M−i para algum i, então:
• F∓∈D−4(s)⇐⇒F±∈D0+(s);
• F∓∈D
−2(s)\D−4◦ (s)⇐⇒F±∈D0−(s)\D−2◦ (s).
Para o interior de tais cones, segue com equivalências análogas. A situação é ilustrada na Figura
12 PRELIMINARES 2.7
Capítulo 3
Hiperbolicidade.
Nesse capítulo, iremos descrever os bilhares estudados em [BL08].
Tome um quadrado unitário e substitua três de seus lados por arcos circulares de curvatura Kd∈(−
√
2,0)tendo suas extremidades nos vértices do quadrado. A condição|Kd|<
√
2 assegura que cada par de arcos adjacentes intersecta somente na extremidade comum. Agora, substitua o quarto lado em um arco circular focalizador de curvatura Kf ≪ 1e cole duas faixas formadas por
regiões poligonais com ângulos interiores racionais como mostra numa versão simplificada a Figura
3.1. Denotamos a altura e comprimento dessas faixas porh e l, respectivamente.
Para a prova da hiperbolicidade desse sistema de bilhar, Bussolari-Lenci em [BL08], não usam exatamente a seção de Poincaré que foi introduzida na Seção 2.1, mas uma seção similar que ne-gligencia colisões nas componentes flat’s. Esse é um procedimento padrão na teoria de bilhares hiperbólicos em que as colisões contra uma componente flat não alteram as características hiper-bólicas de um feixe de trajetórias. Um maneira de ver isso é fazer o desdobramento do bilhar ao longo de uma dada trajetória: após o ponto material colidir com uma componente flat, deixamos sua trajetória mover em linha reta, onde é feita a reflexão da mesa em torno desse lado flat; além desse movimento rígido da mesa do bilhar, nada se altera para a trajetória ou qualquer de suas perturbações infinitesimais.
Dessa forma, denotamos Γ := Γ˜ +∪Γ−. Com o usual abuso de notação, um ponto q ∈Γ será identificado com o seu comprimento de arcose definimosM= ˜Γ×[−π/2, π/2]cujos elementos cha-mamos de(s, α)oux. Vemos que Mé uma seção transversal global para o fluxo do bilhar, ou seja, para quase todas as trajetórias do bilhar tem colisões com Γ˜. Isso se deve ao fato de um resultado
conhecido da teoria de bilhares poligonais (veja [BKM78], Seção 5, pág. 539): sejaP a união fechada das duas faixas comR, ondeRé o quadrilátero unindo as duas extremidades abertas das faixas.P
é um polígono racional, o que significa, que todos os seus ângulos são múltiplos racional de π. Em um bilhar poligonal racional, quase toda trajetória do fluxo não singular no espaço de configuração (isto é, o conjunto {q(t)}t∈R desde que não contenha vértice de P) com vetor velocidade inicial
u, é denso em P [BKM78]. Isso implica que para quase toda condição incial (q, u), com q ∈ P, a trajetória do bilhar em P, colide com a fronteira de R, que significa que a verdadeira trajetó-ria do bilhar, relativo a mesaΩ, colide comΓ˜. Esse resultado implica imediatamente queµ(N±) = 0.
Assim, como M é uma seção transversal global para o fluxo, consideramos F definida para quase todox∈ M sua aplicação de primeiro retorno.
Em [BL08], foi mostrada a hiperbolicidade de um sistema de bilhar tendo como Ω a região explicada acima, definindo um campo de cone que explora o fato que a componente focalizadora é quase plana, e assim quase sempre age como uma fronteira semidispersora.
As constantes geométricas l,Kf eKd são escolhidas via o seguinte procedimento. Inicialmente,
fixe valores arbitrários deheKd. EntãoKf é determinado por uma condição geométrica que depende
14 HIPERBOLICIDADE. 3.0
Figura 3.1: A mesa de bilhar estudada em [BL08].
Figura 3.2: Condição 3 para duas escolhas des′.
de Kd e h que descrevemos aqui com ajuda da Figura3.2. Para s′ ∈ M− e s′′ ∈ M+, considere a
reta passando pors′ es′′, e sejaI(s′, s′′) sua interseção com o discoD−2(s′). A curvaturaKf deve
ser pequena de modo que
∀s′ ∈ M−,∀s′′∈ M+, I(s′, s′′)⊂D4(s′′). (3.1) Finalmente, lé escolhido tal que
l≥1/Kf.
Observação 3. Evidentemente, as hipóteses da teoria standard de Wojtkowski, Markarian, Donnay e Bunimovich (veja [CM06], Teorema 9.19) são violadas na condição (3.1), uma vez que D4(s′′) contém grandes porções de M− para todo s∈ M+.
Para qualquer x = (s, α) ∈ M e n ∈ Z, denotemos xn := (sn, αn) := Fnx e seja τn o
com-primento (equivalentemente ao tempo) entre as colisões em sn e sn+1 (vemos que pode haver um número arbitrário de colisões comΓ0 entresn esn+1). Também, sejaKn=K(sn) a curvatura deΓ
emsn. Analogamente, dadov∈TxM, denotemos porvn:= (DFn)xv. O feixe infinitesimal de
tra-jetórias determinado porvn(e assim porv) em torno de (sn, αn) irão ter focos pré- e pós-colisional
denotados, respectivamente, por Fn− := F−(vn) e Fn+ := F+(vn). As correspondentes distâncias
com sinal ao longo das retas pré- e pós-colisional são indicadas com f−
n e fn+.
Vemos que:
Fn−=Fn+−1, (3.2)
fn− =−(τn−1−fn+−1). (3.3) Ainda seguindo [BL08], definimos os três seguintes cones em TxMpara cadax∈ M:
• C0(x) é o conjunto de todos os vetores tangentes cuja correspondente família de retas focaliza na aproximação linear dentro deD−2(s). Usando a distância focal f+,
C0(x) :=
v∈TxM:−
cosα
|K| ≤f
+(v)≤0
. (3.4)
• C1(x) é o conjunto de todos os vetores tangentes cuja correspondente família de retas focaliza na aproximação linear dentro de D0−(s), isto é, todas as famílias divergentes de retas. Em termos projetivos,
3.0 15
• C2(x) é o conjunto de todos os vetores tangentes cuja correspondente família de retas focaliza na aproximação linear dentro deD2(s)\D4◦(s), isto é,
C2(x) :=
v∈TxM:
cosα 2|K| ≤f
+(v)
≤ cosα |K|
. (3.6)
Os cones acima são usados para definir por partes um campo de cone invariante C:={C(x)}x.
Para cada x = (s, α), a escolha C(x) := Ci(x) irá depender sobre s , s−1, e o que ocorre com a
trajetória entre as colisões em s−1 es.
(A) Ses∈Γ−, definaC(x) :=C0(x). (B) Ses∈Γ+, então existem dois subcasos:
(B.1) Ses−1 ∈Γ+, defina C(x) :=C2(x).
(B.2) Se s−1∈Γ−, há ainda dois subcasos, dependendo se o pedaço da trajetória entre s−1 es possui colisões comΓ0:
(B.2.1) Nenhuma colisão com Γ0 entres
−1 e s: defina C(x) :=C1(x).
(B.2.2) Pelo menos uma colisão com Γ0 entres−1 e s: defina C(x) :=C2(x).
Observamos que C(x) é uma função mensurável dex.
Teorema 3. (Bussolari-Lenci, [BL08]) O campo de cone C definido acima é certamente estrita-mente invariante relativo à aplicação F.
Dessa forma concluímos que F é hiperbólica.
Capítulo 4
Ergodicidade Local.
Quase todas as provas de ergodicidade para sistemas hiperbólicos estão baseadas no método de Hopf [Hop39] que serão introduzidas aqui informalmente, deixando as formalidades para a referência [CM06].
4.1
Método de Hopf
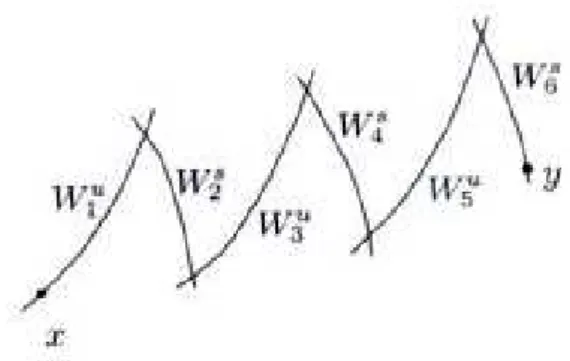
Suponhamos que F :M → M é uma transformação suave, hiperbólica que preserva a medida de probabilidade µ. Suponhamos ainda que para cadax∈M, exista uma variedade estávelWs(x)
e uma variedade instável Wu(x). A prova da afirmação que fazemos abaixo pode ser encontrada nos detalhes em [CM06].
Afirmação 1. Quase toda variedade estável e instável pertence(mod0)a uma componente ergódica da transformaçãoF.
ConsidereW1, W2, . . . , Wnuma sequência de variedades estáveis e instáveis tais queWi∩Wi+16= ∅ para todo i = 1, . . . , n−1. Isso é possível se as variedades estáveis e instáveis se alternam. Se essas variedades são típicas e se elas intersectam em pontos típicos, então pela afirmação acima, a união∪Wi pertence (mod0)a uma componente ergódica de F.
A sequência de variedades estáveis e instáveis é chamada de cadeia de Hopf ou um zig zag. Tal sequência é um instrumento na construção de componentes ergódicas para transformações hiperbólicas.
Figura 4.1:Uma cadeia de Hopf conectandoxey.
Seja A ⊂ M tal que quaisquer dois pontos típicos x, y ∈ A podem ser conectados por uma cadeia de Hopf como na figura anterior. EntãoA pertence(mod0)a uma componente ergódica de
F. SeA=M, então a transformação F é ergódica.
Dessa forma, o método de Hopf se concentra no seguinte fato: para provar a ergodicidade de uma transformação hiperbólicaF, é suficiente mostrar que quaisquer dois pontos típicosx, y∈M podem ser conectados por uma cadeia de Hopf de variedades estáveis e instáveis típicas intersectando-se em
18 ERGODICIDADE LOCAL. 4.2
pontos típicos. Para transformações não ergódicas, o método de Hopf pode ser usado para identificar suas componentes ergódicas.
O setting que permite a construção de uma cadeia de Hopf, chamadas de condições de Katok-Strelcyn, são listadas em [CM06] como (H1)-(H6) na Seção 6.3. A saber, todas essas hipóteses são satisfeitas em nosso bilhar.
Para provarmos a ergodicidade da transformação F, pode-se empregar a seguinte estratégia:
• Encontrar um conjunto M1 ⊂ M tal que para cada ponto x ∈ M1, existe uma vizinhança
U(x)que pertence (mod0)a uma componente ergódica deF.
• Mostrar queM1 tem medida total e é conexo por caminhos.
O primeiro passo é conhecido como ergodicidade ‘local’, enquanto que o segundo como ergodi-cidade ‘global’.
4.2
Principais resultados
Primeiramente, notamos que as técnicas utilizadas nas provas da ergodicidade, estão baseadas nos trabalhos de Del Magno-Markarian [MM14]. Dessa forma, necessitamos trabalhar em todo o bilhar.
Denotamos por M = M+ ∪ M− ∪ M0 e M = M+∪ M− e consideramos F : M −→ M a aplicação do bilhar definido em todo espaço de fase M com a propriedade que Fx = Fk(x)x,
x ∈ M, onde Fnx∈ M0, para 0< n < k(x), com k(x) 6= 1. Aqui F denota a aplicação do bilhar de Bussolari-Lenci.
Figura 4.2: A principal mesa de bilhar.
A Figura 4.2 mostra a mesa de bilhar que estamos interessados para o resto do trabalho. Por [BL08], sabemos que F é hiperbólica, o que implica pelo teorema espectral (veja Teorema 5 no Apêndice A) que F tem no máximo um número enumerável de componentes ergódicas de medida positiva (para a medida natural µ) com cada componente ergódica decomposta em um número finito de componentes Bernoulli ciclicamente permutadas por F. Nós provamos que, existe um conjunto H ⊂ M de medida total tal que, para todo x ∈ H, existe uma vizinhança U ⊂ M
contida (mod 0)em uma componente Bernoulli de F (veja Teorema A). Por essa razão, esse tipo de resultado é as vezes chamado de Teorema Ergódico Local. Por um argumento de conexidade, finalmente, mostramos queF é Bernoulli.
Definimos H := M \ R. Vemos que µ(H) = 1, pois pela regularidade do conjunto R+k (veja
Subseção 4.3.1), concluimos que µ(R+k) = 0.
O principal resultado desse trabalho é o seguinte teorema e será provado na próxima seção:
Teorema A. Cada ponto x ∈ H possui uma vizinhança contida (mod 0) em uma componente Bernoulli deF.
Corolário 1. Cada componente Bernoulli de F é aberta (mod 0).
Demonstração. Seja B uma componente Bernoulli. Como µ(B) > 0, então µ(B ∩ H) > 0. Seja
x∈B∩ H, e seja U a vizinhança dex como no Teorema A. O conjuntoV :=S
4.3 ERGODICIDADE LOCAL 19
Corolário 2. A aplicaçãoF :H −→ H é Bernoulli.
Antes de mostrarmos o corolário, precisamos da proposição a seguir. Lembre que Hconsiste de componentes conexasMi.
Proposição 2. Cada componente conexa Mi do espaço H pertence (mod 0) a uma componente
Bernoulli deF.
Demonstração. Como R é enumerável (veja [MM13b]), então o complementar Mi \ R é conexo
por caminhos. Suponhamos que x, y ∈ Mi\ R são conectados por uma curva contínua compacta
C ⊂ Mi \ R. Cada ponto z ∈ C satisfaz o Teorema A, assim existe vizinhança Uz pertencente
(mod 0) a uma componente Bernoulli de F. Devido a compacidade de C, pode-se cobrir por um número finito de tais vizinhanças abertas, veja figura abaixo.
Figura 4.3: Prova da Proposição2.
Nessas condições, demonstramos o Corolário 2.
Demonstração. Pelo Teorema A, cada ponto de H possui uma vizinhança contida, a menos de um conjunto de medida nula, em uma componente Bernoulli de F. Pela Proposição 2, o mesmo é verdade para cada componente conexa deH; e então para cada Mi∩ Htal que Mi ⊂ M−∪ M+.
Comoµ(H) = 1, podemos concluir que cadaMi⊂ M−∪ M+ está contido(mod0)em uma única
componente Bernoulli deF. ComoΩé conexo, segue que todosMipertencem a mesma componente
Bernoulli, ou seja,F é Bernoulli.
4.3
Ergodicidade local
Nessa seção, enunciaremos os principais resultados para a prova do Teorema A. Isso será feito aplicando o Teorema4à aplicaçãoF. Inicialmente, enunciaremos o Teorema4e em seguida daremos as noções requeridas para a sua formulação. Esse teorema é a versão para bilhares planares de um Teorema Ergódico Local para simplectomorfismos com singularidades em qualquer dimensão provado em [MM13a]. O Teorema4 possui quatro hipóteses chamadas de Condições L1-L4.
Demonstração do Teorema A. A conclusão do Teorema segue aplicando o Teorema 4aos pontos de H. Para isso, precisamos mostrar que cada ponto de H é suficiente (veja Definição 7), e que para cada um desses pontos, as Condições L1-L4 do Teorema4são satisfeitas. O primeiro fato é provado no Corolário3, enquanto que o segundo fato está provado nas Proposições 3,4,6 e13.
20 ERGODICIDADE LOCAL. 4.3
4.3.1 Condição L1 - Regularidade
Definição 4. Um conjunto X ⊂ Mé dito regular se X é uma união finita de arcos de classe C2 que intersectam somente nas extremidades. A coleção de tais arcos é chamada uma decomposição de X.
Definição 5. Dizemos que a Condição L1 é satisfeita se os conjuntosR+k e R−k são regulares para cadak >0.
Antes de garantirmos a regularidade dos conjuntos R+k e R−k, definimos o conceito de arco
singular e daremos um novo sistema de coordenadas locais para M que foram introduzidos em [MM13b].
Arcos singulares
A grosso modo, um arco singular é um arco de classe C2 contido emR+
m para algum m >0.
Definição 6. Um arco Σ de classe C2 é chamado negativamente singular se ou Σ ⊂ ∂M ou se existem j >0 e arcos Σ0, . . . ,Σj−1 tais que após definirΣj = Σ tem-se:
• Σ0⊂∂M;
• Σi∩ S1+⊂∂Σi para 0≤i < j;
• intΣi+1=F(intΣi) para 0≤i < j;
• Σi∩∂M ⊂∂Σi para 0≤i≤j.
Um arco positivamente singular é definido similarmente substituindo F com F−1.
Coordenadas locais para M
Suponhamos que Σ1 é um arco negativamente singular tal que Σ1∩ S1+ ⊂ ∂Σ1. Nesse caso, cada conjuntoq(Σ1) e q1(intΣ1) está contido em uma única componente de ∂Ω. Sejam Γ1 e Γ2 as componentes de fronteira contendo q(Σ1) eq1(intΣ1), respectivamente.
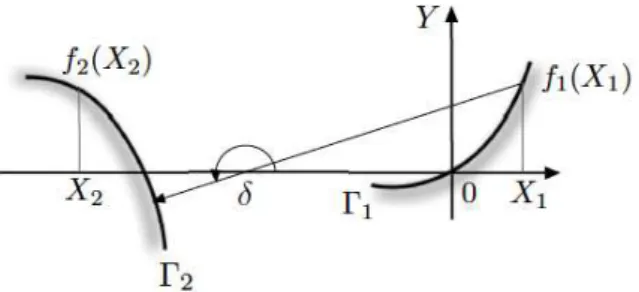
Dado z1 ∈Σ1, sejam p1 = q(z1) e p2 o ponto de interseção entre Γ2 e o raio emergindo de z1 tendo a distância mínima dep1. Estudamos agora, a imagem deΣ1sob a aplicação do bilharF para todas as possíveis escolhas de Γ1 e Γ2. Para efeito de cálculo, é conveniente obter uma descrição analítica da configuração formada por Γ1 e Γ2 em um sistema de coordenadas cartesianas (X, Y) paraR2. Ao fazer isso, obtemos um novo sistema de coordenadas locais paraM. Podemos escolher
o sistema de coordenadas cartesianas(X, Y) (veja Fig.4.4) tal que • p1 = (0,0)e p2= ( ¯X,0)comX¯ ≤0 em coordenadas (X, Y);
• existem dois intervalos fechados U1 e U2 de R com U1 contendo 0 e U2 contendo X¯ e duas funções C3 f
1 : U1 → R e f2 : U2 → R com f1(0) = f2( ¯X) = 0 tal que Γ1 = graf(f1) e
Γ2 = graf(f2); além disso, temos ou f1′′ ≡ 0 (Γ1 flat) ou f1′′ > 0 em U1 (Γ1 curva), e/ou
f2′′≡0 (Γ2 flat) ou |f2′′|>0 emU2 (Γ2 curva).
Dadox∈ M1∪ M2, seja X aX-coordenada deq(x), e sejaδ ∈[0,2π) o ângulo entre o eixoX
e o vetoru(x). Recorde queM1∪ M2 está equipado com as coordenadas locais (s, α). O par(X, δ)
forma outro sistema de coordenadas locais emM1∪ M2. Em coordenadas(X, δ)temosz1 = (0, π). A relação entre(s, α) e(X, δ) emM1 segue como na equação (17) de [MM13b], difere apenas com relação a parametrização do ângulo:
s =
Z X 0
q
1 +f′2
1 ( ˜X)dX˜
α =
δ−tan−1f1′(X)−π/2, se f1′(X)≥0,
4.3 ERGODICIDADE LOCAL 21
Figura 4.4:Γ1 eΓ2 no sistema de coordenadas cartesianas(X, Y).
A transformação é uma C2 mudança de coordenadas.
Como o arco Σ1 é um intervalo fechado mergulhado, existe um intervalo fechado I1 = [a1, b1] com a1 < b1 e duas funções C2 X1 : I1 → R e δ1 : I1 → R com (X1′(a), δ′1(a)) 6= (0,0) para todo a ∈I1 tal que γ1 := (X1, δ1) :I1 → Σ1 é um C2 difeomorfismo. Escolha ¯a∈ [a1, b1] tal que
γ1(¯a) =z1. Pela escolha do sistema de coordenadas(X, Y), segue queX1(¯a) = 0 e δ1(¯a) =π. No próximo lema, é dado a expressão do tempo de focalização de γ1′(a) em coordenadas (X, δ), veja Lema 6.3 de [MM13b].
Lema 4. Temos
f+(γ1(a), γ1′(a)) =
[tanδ1(a)−f1′(X1(a))] cosδ1(a)
X′ 1(a)
δ1′(a), se δ
′
1(a)6= 0
∞, se δ′
1(a) = 0
(4.1)
A relação entre duas colisões consecutivas, a primeira ocorrendo em Γ1e a segunda emΓ2, pode ser expressa como zeros simultâneos das funçõesF :M1× M2 →ReG:M1× M2 →Rdefinidas
por
F(X1, δ1, X2, δ2) = f1(X1)−f2(X2)−tanδ1·(X1−X2),
G(X1, δ1, X2, δ2) = δ1+δ2−2α2(X2) +π,
para cada(X1, δ1, X2, δ2)∈ M1×M2. A funçãoα2 denota o ângulo formado pelo eixoXcom a nor-mal àΓ2em(X2, f2(X2))apontando para dentro do domínio do bilharΩ. A relaçãoF(X1, X2, δ1, δ2) =
0 é a equação da reta tendo inclinação igual à tanδ1 e passando pelos pontos (X1, f1(X1)) e
(X2, f2(X2)), enquanto que a relação G(X1, X2, δ1, δ2) = 0 descreve a igualdade dos ângulos de incidência e reflexão em (X2, f2(X2)).
Recorde que I1 ∋ a 7→ (X1(a), δ1(a)) é uma parametrização do arco singular Σ1. Sejam F1 : M2×I1 →ReG1 :M2×I1 →Rfunções C2 diferenciáveis dadas por:
F1(X1, δ1, X2, δ2) = F1(X1(a), δ1(a), X2, δ2),
G1(X1, δ1, X2, δ2) = G1(X1(a), δ1(a), X2, δ2),
para cada(X2, δ2, a)∈ M2×I1. Defina também:
D1(X2, δ2, a) = det
∂δ2F1 ∂aF1
∂δ2G1 ∂aG1
= [tanδ1(a)−f1′(X1(a))]X1′(a) +
δ′1(a) cos2δ
1(a)
,
para cada(X2, δ2, a)∈ M2×I1. Vemos queD1está bem definida, pois de acordo com nosso setting, sempre temoscosδ1 6= 0 paraasuficientemente próximo dea.
asso-22 ERGODICIDADE LOCAL. 4.3
ciadas à colisãoγ1(a). Para a sua prova, veja Lema 6.6 de [MM13b]. Recorde que τ(γ1(a))denota o comprimento do segmento conectandoq(γ1(a))e q1(γ1(a)).
Lema 5. Temos
D1(X2, δ2, a) =
[f+(γ1(a), γ1′(a))−τ(γ1(a))]
δ′ 1(a)
cosδ1(a)
, se δ′
1(a)6= 0
[tanδ1(a)−f1′(X1(a))]X1′(a), se δ1′(a) = 0
(4.2)
Proposição 3. A Condição L1 é satisfeita.
Demonstração. Dado um arco Σ1 ⊂ R±k para algum k >0, a proposição será provada no sistema
de coordenadas cartesianas (X, Y) estudado acima. Para garantir que o arco Σ1 é de classe C2, usaremos o Teorema da Função Implícita. Assim, devemos garantir que o determinante da derivada (Lema5) é diferente de zero nos pontos da imagem deΣ1. Primeiramente vamos analisar o caso em queδ′
1(a)6= 0, isso se reduz a estudarmos a diferençafj+−τj−1 para algum1≤j≤k. É suficiente provar a proposição somente para os conjuntos R+
k. De fato, o resultado se estende para R
−
k pelo
tempo de reversibilidade deF.
Assim, dadoΣ1 ⊂ R+k para algumk >0, considerez∈ −Eipara algumi. SejaUz vizinhança de
ze tomex= (s, α)∈ −Ei∩Uz∩Σ1\A2, assim existe1≤j≤ktal que Fjx=xj = (sj, αj)∈Ej.
Estudemos os casos possíveis:
1. xj−1 ∈ M− e xj ∈ M−: Nesse caso, C(xj−1) = C0(xj−1) e C(xj) = C0(xj). Ou seja,
Fj+∈D◦−2(sj) e, portanto, fj+<0. Como τj−1 ≫0, temosτj−1≫fj+.
2. xj−1 ∈ M− exj ∈ M+: AquiC(xj) =C0(xj), porém o coneC(xj) pode ter duas formas. Se
não houver colisão comΓ0entres
j−1esj, entãoC(xj) =C1(xj)daíFj+∈D0−(sj)i.éfj+≤0.
Novamente, como τj−1 ≫ 0 segue o resultado. Se há pelo menos uma colisão com Γ0 entre
sj−1 esj então C(xj) =C2(xj), assimFj+∈D◦2(sj)\D4(sj), isto é, fj+<cosα/Kf ≤1/Kf,
porémτ >2l≥2/Kf, que implicaτj−1 ≫fj+.
3. x ∈ M+ e Fjx ∈ M−: Por definição, C(x
j) = C0(xj) (se houver ou não colisão com Γ0).
Assim,fj+≤0 logoτ ≫fj+.
4. xj−1 ∈ M+ e xj ∈ M+: Aqui C(xj) =C2(xj) por definição, assim fj+ ≤cosα/Kf. E temos
dois subcasos: se não houver colisão comΓ0entresj−1esj então o pedaço da trajetória é uma
corda de comprimento τj−1 = 2(cosα)/Kf > cosα/Kf. Notamos que nesse caso cosα ≫ 0,
uma vez que as colisões sucessivas contra a componente focalizadora produzem ângulos iguais aos de entrada. Se a entrada na focalizadora é proveniente da componente flat, o ângulo αj
poderá estar próximo de π/2, porém a trajetória deverá ir novamente para a parte flat, mas isso somente ocorre em um número finito de vezes, dessa forma, basta tomar o ângulo αj em
que a trajetória vai para a parte dispersora. Se a entrada na focalizadora é proveniente da dispersora é trivial. Portanto, τj−1 ≫ fj+. Se houver pelo menos uma colisão com Γ0 entre
sj−1 esj então τj−1>2l≥2/Kf, ou seja,τj−1 ≫cosα/Kf que implicaτj−1 ≫fj+.
Suponhamos agora queδ′
1(a) = 0. SeX1′(a) = 0então γ1′(a) = (X1′(a), δ1′(a)) = (0,0)o que não ocorre pela parametrização do arco singular Σ1. Agora, por construção do sistema de coordenadas segue quef1′(X1(a))6= tanδ1(a). Portanto, o determinante da derivada dado no Lema5é diferente de zero.
4.3 ERGODICIDADE LOCAL 23
4.3.2 Condição L2 - Alinhamento
Definição 7. Um ponto x∈ M \∂M é chamado suficiente se existeml ∈Z, N ∈N, O aberto e um campo de cone invariante (O∪ F−NO, K) tais que:
1. x /∈ R+|l|∩ R−|l|,
2. O é uma vizinhança deFl+Nx e O∩ R−
N =∅,
3. σK(DyFN)>3 para todo y∈ F−NO.
Dizemos que x é um ponto suficiente com quádrupla (l, N, O, K).
No Corolário 3 iremos provar que todo x ∈ Hé suficiente, assim supomos aqui a existência de uma quádrupla(l, N, O, K) associada.
Definição 8. Dizemos quex satisfaz a Condição L2 se o subespaço tangenteTyΣ está contido em
K(y)(resp. K′(y)) para cada k >0, cadaC2-arcoΣdeR−
k (resp.R+k) e caday∈Σ∩ F−NO (resp.
Σ∩O).
Proposição 4. Cada pontox∈ H satisfaz a Condição L2.
Demonstração. Seja Σ⊂ R−k um arco C2 com k > 0. Podemos supor sem perda de generalidade queΣ6⊂∂M, pois caso contrário teríamos Σ∩ F−NO =∅pela condição (2) da Definição 7.
A idéia da prova é estudar a evolução de um feixe de trajetórias emergindo de um vértice (ou tangência). Denotemos tal vértice por z. Ou seja, basta analisarmos a imagem do vetor v = (ds, dα) = (0,1) ∈ TzM (ou v = (1,0) ∈ TzM de modo análogo) em diferentes componentes.
Assim, seja y ∈Σ∩ F−NO tal que y=Fz= (ds
1, dα1). Utilizando a fórmula (2.5) da diferencial de F, obtemos
DzFv= (ds1, dα1) =
−τ cosα1
, τK cosα1 −
1
⇒ dαds1 1
=−K+cosα1 τ .
Logo, pela fórmula (2.2), tem-se
f1+(v) = τcosα1 2Kτ −cosα1
. (4.3)
(I) Se z= (0, α) ∈ M−1 ∩ M−2 e y ∈ M−3, temos por definição que K(y) :=C0(y). Logo devemos provar que DzFv ∈ C0(y). De fato, como Kd < 0 temos 2Kdτ −cosα1 < 0 e assim f1+(v) ≤ 0. Agora, suponhamos que
f1+(v) = τcosα1 2Kdτ −cosα1
< cosα1
Kd
isso implicaria (cosα1)/Kd> τ >0 comKd<0, o que é um absurdo. Logo,f1+(v)≥(cosα1)/Kd.
(II) Sez= (0, α)∈ M−1 ∩ M2− e y∈ M+, entãoK(y) pode ter duas formas:
(II.I) se não houver colisão com Γ0 entre s= 0 e s1 então K(y) :=C1(y). Nesse caso, Kf >0
porém pela propriedade (3.1) segue que z ∈ D4(y), isso significa que o comprimento do segmento determinado porye∂D4(y)ao qualzpertence, é maior queτ. Em outras palavras,(2 cosα1)/4Kf >
τ, ou seja,2Kfτ −cosα1 <0, e portanto,f1+(v)≤0.
(II.II) se houver pelo menos uma colisão com Γ0 entre s= 0 e s1, então K(y) :=C
2(y). Aqui
τ >2l≥2/Kf, pois l≥1/Kf. Assim,
2τKf −cosα1 >4−cosα1 > τKf ⇒
1 2τKf−cosα1
< 1 τKf
daí,
f1+(v) = τcosα1 2τKf −cosα1 ≤
cosα1 Kf
24 ERGODICIDADE LOCAL. 4.3
Agora,
2
Kf
< τ ⇒ 1
4 2
Kf
< 1 4τ ⇒
cosα1
2Kf
< τcosα1
4 ≤
τcosα1
2τKf −cosα1
=f1+(v),
uma vez que2τK1−cosα1 ≤4.
(III) Se z= (0, α)∈ M0∩ M+ ey ∈ M−, entãoK(y) :=C
0(y) e segue de modo análogo ao caso (I) (com ou sem colisão com Γ0).
(IV) Se z= (0, α)∈ M0∩ M+ e y∈ M+, então K(y) :=C
2(y) e temos duas possibilidades: (IV.I) Ou há pelo menos uma colisão com Γ0 entre s= 0 e s1, daí K(y) := C2(y) e segue de modo análogo ao caso (II.II).
(IV.II) Ou não há colisão comΓ0 entres= 0es1, assim o pedaço da trajetória é uma corda de comprimentoτ = (2 cosα1)/Kf, substituindo em (4.3) temos
f1+(v) = 2 cosα1 3Kf
,
ou seja,
cosα1
2Kf ≤
f1+(v)≤ cosα1
Kf
.
4.3.3 Condição L3 - Sinai-Chernov ansatz
Definição 9. Um ponto x∈ M \∂Mé chamado u-essencial se para cada α >0, existe nx,α ∈N,
uma vizinhança Ox,α dex e um campo de cone invariante (Ox,α∪ Fnx,αOx,α, Kx,α) tal que Ox,α∩
R+
n =∅eσ∗Kx,α(DyF
nx,α)> αpara caday∈O
x,α. Analogamente, um pontox∈ M\∂Mé chamado
s-essencial se na definição anterior, F e R+n são substituídos por F−1 e R−n, respectivamente. O campo de cone (O, K) na Definição7é certamente estritamente invariante. Por um resultado em [Woj85, Mar88] segue que os expoentes de Lyapunov de F são não nulos quase sempre em S
k∈ZFkO. Esse fato juntamente com a teoria de Katok-Strelcyn [KS86] nos dá a Proposição abaixo (Parte (3) é provada em [MM13a] Proposição 5.3). Para a definição de continuidade absoluta de uma foleação, nos referimos a [CM06,KS86].
Proposição 5. Seja x ∈ M \∂M um ponto suficiente com quádrupla (l, N, K, O). Então existe um conjunto invariante Λx ⊂ Sk∈ZFkO com µ((
S
k∈ZFkO) \Λx) = 0 e duas famílias de C2 subvariedades invariantes Vs ={Vys}y∈Λx e V
u ={Vu
y}y∈Λx tais que para cada y∈Λx, tem-se 1. Vs
y ∩Vyu ={y},
2. Vys e Vyu são difeomorfos a intervalos abertos,
3. TyVys⊂K′(y) e TyVyu ⊂K(y) dado quey∈O∪ F−NO,
4. FVs
y ⊂VFsy e F−1Vyu⊂VFu−1y,
5. d(Fny,Fnz)→0exponencialmente quando n→+∞para cadaz∈Vs
y, e o mesmo é verdade
quando n→ −∞ para cada z∈Vyu,
6. Vys e Vyu variam mensuravelmente com y∈Λx,
7. Vs e Vu tem a propriedade de continuidade absoluta.
Definição 10. As subvariedades formando as famílias Vs e Vu são chamadas variedades estável

![Figura 3.1: A mesa de bilhar estudada em [BL08].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16722585.214495/31.892.261.669.176.434/figura-a-mesa-de-bilhar-estudada-em-bl.webp)