controlo de respostas dinâmicas em estruturas através de tmd's pendulares
79
0
0
Texto
(2) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 2.
(3) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. MESTRADO INTEGRADO EM ENGENHARIA CIVIL 2012/2013 DEPARTAMENTO DE ENGENHARIA CIVIL Tel. +351-22-508 1901 Fax +351-22-508 1446 . [email protected]. Editado por. FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Rua Dr. Roberto Frias 4200-465 PORTO Portugal Tel. +351-22-508 1400 Fax +351-22-508 1440 . [email protected]. . http://www.fe.up.pt. Reproduções parciais deste documento serão autorizadas na condição que seja mencionado o Autor e feita referência a Mestrado Integrado em Engenharia Civil 2012/2013 - Departamento de Engenharia Civil, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2013.. As opiniões e informações incluídas neste documento representam unicamente o ponto de vista do respetivo Autor, não podendo o Editor aceitar qualquer responsabilidade legal ou outra em relação a erros ou omissões que possam existir.. Este documento foi produzido a partir de versão eletrónica fornecida pelo respetivo Autor.. 3.
(4) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 4.
(5) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Aos meus pais. 5.
(6) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 6.
(7) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. AGRADECIMENTOS A realização deste trabalho, que para mim representa a oportunidade de aplicar o que aprendi durante estes cinco anos de faculdade, representa também o término de um ciclo importante na minha vida pessoal e académica. Sinto por isso que existem pessoas que estiveram presentes nesta etapa da minha vida às quais quero expressar o meu sentimento de gratidão. Não posso deixar de agradecer a todos os professores que durante estes cincos anos, dedicaram grande parte do seu tempo, a transmitir com o maior esforço, paciência e boa vontade os seus conhecimentos, abdicando muitas vezes até de tempo pessoal para estarem de gabinete aberto a todas as nossas dúvidas. Tenho no entanto que expressar especial agradecimento, ao meu Orientador, Professor Rui Carneiro Barros, pela sua constante disponibilidade em ajudar, orientar, disponibilizar bibliografia e corrigir os meus erros. Sem os seus valiosos conselhos e orientação a conclusão deste trabalho não teria sido possível. Agradeço muito também ao Jorge Henriques e ao Fábio por me terem ajudado de forma fulcral na reta final deste trabalho. Aos meus amigos, aqueles que guardo desde o inicio da minha adolescência na Madeira, um obrigado por todos os momentos de alegria e todas as memorias que me ajudaram a formar como pessoa, aos meus amigos que conheci nesta etapa da minha vida, sem eles a minha vida académica não teria sido recheada de alegrias, gargalhadas, muito otimismo e principalmente de muita interajuda como foi. Aos meus pais, que são o meu porto seguro, o meu exemplo de perseverança, de otimismo e de caracter, o meu muito obrigado, pelo apoio incondicional, pelo amor constante e pela oportunidade de tirar este curso. E por fim à minha irmã Filipa por ser minha amiga incondicional desde que nasceu, um obrigada por tudo e por me ter acompanhado também aqui no Porto nesta etapa da minha vida, sempre com um sorriso e com uma leveza própria de quem está sempre muito segura e otimista no presente e no futuro, transmitindo-me segurança para ultrapassar os obstáculos típicos da vida académica. 7.
(8) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 8.
(9) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. RESUMO Com o avanço constante das tecnologias é possível construir, nos dias que correm, estruturas cada vez mais altas, mais flexíveis e poupar recursos, tais como materiais construtivos. Estes avanços implicam em inúmeros casos, um controlo estrutural acrescido, nestes casos os TMD’s podem ser de grande utilidade, pois podem diminuir significativamente a resposta dinâmica e garantir a segurança estrutural e o bom funcionamento destas estruturas. O presente trabalho tem como objetivo o estudo do efeito da colocação de TMD’s, em particular os TMD’s em forma de pêndulo, em diferentes estruturas da engenharia civil. Tem também como objetivo analisar os fatores de que depende uma eficiente colocação e sintonização de um TMD pendular, tendo em conta a estrutura alvo e as ações dinâmicas a que esta se encontra sujeita. Inicialmente o trabalho começa por resumir algumas técnicas de controlo estrutural existentes, a sua aplicabilidade, e referem-se também algumas situações reais da aplicação de TMD’s em forma de pêndulo. Em primeiro lugar são estudadas as equações que regem o movimento de um pêndulo, de seguida é construído um exemplo simples de dois graus de liberdade, sendo estes: o movimento numa só direção da estrutura e o ângulo do pêndulo em relação à horizontal que passa no seu ponto de fixação à estrutura. A partir deste exemplo é então feita uma análise com cálculos analíticos e outra com recurso a um software de elementos finitos SAP2000. Este modelo simples é construído no sentido de confrontar resultados e testar a fiabilidade dos resultados obtidos pelo software. É também estudada a possibilidade de um modelo mais complexo, de uma parede treliçada, de grandes dimensões, projetada para servir de apoio a ensaios a outras estruturas, beneficiar da colocação de um TMD pendular, neste cálculo é tida em conta a ação do vento, segundo o Eurocódigo 1 quando esta estrutura não está a ser utilizada para nenhum ensaio. Modelando computacionalmente a parede treliçada pode-se comparar os valores da sua resposta estrutural à ação dinâmica do vento no caso de não ter nenhum tipo de controlo estrutural adicional, com os valores da resposta à mesma ação mas recorrendo ao uso de TMD’s pendulares, podendo avaliar assim o benefício da utilização destes dispositivos para controlo estrutural. Para finalizar são estudados os resultados das várias simulações feitas, e analisadas as situações em que os TMD’s pendulares se mostram eficazes.. Palavras-Chave: TMD’s, Pêndulo,Vento, Controlo de Vibrações.. 9.
(10) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 10.
(11) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. ABSTRACT. With the current technology advances, nowadays it is possible to construct higher and more flexible structures and save resources such as construction materials. These advances often require an increased structural control, for which TMD's can prove very useful, since they can lead to a significant reduction in the dynamic response and guarantee structural safety and good operation of these structures. This work aims to study the influence of using TMD's, in particular TMD's in pendulum layout, in different civil engineering structures. Another goal is to evaluate which factors are relevant for an efficient placement and synchronization of a pendulum TMD, taking into account the particular structure involved and the dynamic actions it is subjected to. Initially the work will summarize presently available techniques for structural control, its applicability and characteristics, and will also refer real situations where pendulum TMD's have been used. The theory behind the movements of a pendulum is stated, followed by the construction of a simple example with two degrees of freedom, unidirectional movement of the structure and the pendulum angle in relation to horizontal, including analytical evaluation and numerical modelling using the finite elements software SAP2000. This simple model is built to validate results and test the reliability of the numerical modelling. An additional study with a more complex model was also studied, comprising a loading tower of a transmission tower testing station to benefit from the placement of a pendulum TMD, in this case accounting for the wind action, according to Eurocode 1. The numerical modelling to the loading tower allows a comparison between the values of structural responses to dynamics related to the wind force, without these control devices, with the values of the responses to the same action but with pendulum TMD incorporated, and in this way to evaluate the efficiency of assuming the application of those devices for structural control. Finally, the results of different simulations are discussed in order to conclude if the application of pendulum TMD's is worthwhile in civil engineering structures.. KEYWORDS: TMD's, Pendulum, Wind, Vibration Control.. 11.
(12) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 12.
(13) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. ÍNDICE GERAL 1 INTRODUÇÃO .................................................................................. 19 1.1. ASPETOS GERAIS ........................................................................................................... 19 1.2. SÍNTESE DE OBJETIVOS ................................................................................................... 20 1.3. ESTRUTURA DO TRABALHO ............................................................................................. 20. 2 SISTEMAS DE CONTROLO DE VIBRAÇÕES - ESTADO DA ARTE 23 2.1. INTRODUÇÃO .................................................................................................................. 23 2.2. SISTEMAS DE CONTROLO ATIVO ............................................................................. 23 2.3. SISTEMAS DE CONTROLO SEMI-ATIVO.................................................................... 24 2.4. SISTEMAS DE CONTROLO HÍBRIDO ......................................................................... 24 2.5. SISTEMAS DE CONTROLO PASSIVO ........................................................................ 25 2.5.1. ISOLAMENTO DE BASE ............................................................................................................. 25 2.5.2. AMORTECEDORES DE MASSA SINTONIZADA TUNED MASS DAMPERS (TMD) ................. 26 2.5.2.1. AMORTECEDORES DE MASSA SINTOZINADA PENDULARES PENDULUM TUNED MASS DAMPERS (PTMD) ............................................................................................................................... 28. 3 FUNDAMENTOS TEÓRICOS E FORMULAÇÃO MATEMÁTICA...... 29 3.1. INTRODUÇÃO .................................................................................................................. 29 3.2. FATOR DE AMPLIFICAÇÃO DINÂMICA E A SUA REDUÇÃO POR MEIO DE UM AMORTECEDR DE MASSA SINTONIZADA ....................................................................... 29 3.2.1. EM ESTRUTURAS SEM AMORTECIMENTO ............................................................................ 29 3.2.2. EM ESTRUTURAS COM AMORTECIMENTO ............................................................................ 32. 3.3. ANÁLISE ESTRUTURAL DE SISTEMAS DE UM GRAU EQUIVALENTE .............................. 36 3.4. FORMULAÇÃO MATEMÁTICA DO MOVIMENTO DE UM PÊNDULO ................................... 37 3.5. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA AÇÃO HARMÓNICA. ......... 40 3.6. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA EXCITAÇÃO NA BASE ....... 43. 4 APLICAÇÃO A CASOS PRÁTICOS SIMPLES ................................................ 45 4.1. APLICAÇÃO DE UM TMD PENDULAR A UM PÓRTICO DE UM PISO E UM VÃO. ......................... 45 4.2. VARIAÇÃO DOS DIFERENTES PARAMETROS DO TMD PENDULAR APLICADO NO PÓRTICO DE UM PISO E UM VÃO ............................................................................................................ 54 4.3. PÓRTICO MULTIPISO DE UM VÃO ...................................................................................... 58. 13.
(14) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 5 ESTUDO DO CONTROLE DE VIBRAÇÕES COM TMD PENDULAR NUMA ESTRUTURA REAL .................................................................................... 67 5.1. DESCRIÇÃO E MODELAÇÃO COMPUTACIONAL DA PAREDE DE REAÇÃO DA PLATAFORMA DE ENSAIOS DA METALOGALVA ................................................................................................... 67 5.2. AÇÕES E RESPOSTAS DINÂMICAS DA PAREDE DEVIDAS AO VENTO ..................................... 70 5.3. DIMENSIONAMENTO DO TMD PENDULAR ............................................................................ 74 5.4. DISCUSSÃO DE RESULTADOS ........................................................................................... 76. 6 CONCLUSÃO ........................................................................................ 77 6.1. CONSIDERAÇÕES FINAIS ................................................................................................. 77 6.2. PROPOSTAS DE DESENVOLVIMENTOS FUTUROS ................................................................ 78. 14.
(15) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Índice de Figuras Fig 2.1 Esquema ilustrativo do funcionamento de um sistema de controlo ativo [1] ............................ 24 Fig. 2.2- Esquema ilustrativo de um dispositivo isolador de base ........................................................ 26 Fig. 2.3- Esquema ilustrativo do aparelho supressor de vibrações de Frahm ...................................... 27 Fig. 2.4- TMD pendular do edifício Taipei, localizado em Taiwan ........................................................ 28 Fig. 3.1– Fator de amplificação dinâmica fixando os valores de α=1 e µ=0,05 .................................... 30 Fig. 3.2 Fator de amplificação dinâmica fixando os valores de α=0.08 e µ=0,05 ................................ 32 Fig. 3.3 Curvas de amplificação máxima do deslocamento do sistema principal ................................ 34 Fig. 3.4 -Curvas para determinação do valor ótimo de .................................................................... 34 Fig. 3.5 Curvas para determinação do valor ótimo de ξαopt ................................................................... 35 Fig. 3.6- Fator de amplificação dinâmica fixando os valores de ζs=0,01 e µ=0,01 .............................. 35 Fig. 3.8 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma força harmónica Fa(t) ............................................................................................................................ 40 Fig. 4.2- Pórtico simples com TMD pendular acoplado sujeito a ação horizontal harmónica F(t) ........ 46 Fig. 4.3- Extração dos modos de vibração no programa SAP2000 ...................................................... 47 Fig. 4.4-Deslocamentos do nó 2 ao longo do tempo obtidos no software SAP2000............................ 48 Fig. 4.5-Acelerações do nó 2 ao longo do tempo obtidos no software SAP2000 ................................. 49 Fig. 4.7 – Deslocamentos da estrutura com pêndulo (nó 2) no software SAP2000 ............................. 51 Fig. 4.8 – Acelerações ao longo do tempo da estrutura com pêndulo (nó 2) no software SAP200 ..... 51 Fig. 4.9-Portico com pêndulo alterado definido no software SAP2000................................................. 52 Fig. 4.10-Primeiro modo de vibração do pórtico com pêndulo alterado no software SAP2000 ........... 53 Fig. 4.11 – Deslocamentos ao longo do tempo (nó 2) no software SAP2000 ...................................... 53 Fig. 4.12 – Acelerações ao longo do tempo (nó 2) no software SAP2000 ........................................... 54 Fig-4.13- Deslocamentos ao longo do tempo dos cinco casos de estudo ........................................... 55 Fig 4.15 Aproximação da função de sin(x) à função de x ..................................................................... 57 Fig 4.16 - Aproximação da função de cos(x) à função de. ...................................................... 57. Fig 4.18 – Deformada dos primeiros 4 modos de vibração .................................................................. 59 Fig. 5.1- Bancos de ensaios de Nagpur ................................................................................................ 67 Fig. 5.2- Imagem, retirada do software Autodesk Robot Structural Analysis, da parede de reação secundária. ............................................................................................................................................ 68 Fig. 5.3- Modelo bidimensional da parede de reação secundária ........................................................ 69 Fig. 5.4- Modelo bidimensional da parede de reação secundária ........................................................ 69 Fig. 5.5- Forças instantâneas geradas na serie 1 gerada para o 2 nível.............................................. 72 Fig. 5.6- Forças instantâneas geradas na serie 1 para cada nível de altura ........................................ 73. 15.
(16) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Fig 5.7- Deslocamentos ao longo do tempo do ponto mais alto da parede .......................................... 73 Fig 5.8- Acelerações ao longo do tempo do ponto mais alto da parede ............................................... 74 Fig 5.10- Acelerações ao longo do tempo do ponto mais alto da parede com aplicação do TMD ....... 75. Índice de Quadros Quadro 4.1- Casos de estudo ............................................................................................................... 55 Quadro 4.2 -Casos de estudos e respetivos resultados ....................................................................... 55. 16.
(17) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. SÍMBOLOS E ABREVIATURAS. TMDs - Amortecedores de massa sintonizada TMD - Amortecedor de massa sintonizada TLDs - Amortecedores de líquido sintonizado. β- razão entre a frequência de excitação e a frequência natural da estrutura principal α- razão entre a frequência natural do TMD e a frequência natural da estrutura principal wa- frequência natural do TMD ws-frequência natural da estrutura principal - coeficiente de amortecimento do TMD µ- razão entre a massa do sistema adicional e a massa do sistema principal αopt- razão ótima entre a frequência natural do TMD e a frequência natural da estrutura principal R- fator de amplificação dinâmica opt- coeficiente. ótimo de amortecimento do TMD. - Coeficiente de amortecimento da estrutura principal T- energia cinética U- Energia potencial total -energia potencial gravítica -energia potencial elástica L- Equação de movimento do pêndulo Km – rididez de rotação da mola l – comprimento do pêndulo y- altura que sobe o pendulo medida na vertical θ- rotação da barra do pendulo em relação à vertical correspondente ao pêndulo imobilizado. θ -velocidade angular da barra do pêndulo TG -energia cinética do sistema formado pelo pêndulo. Cp. - Coeficiente de amortecimento do pêndulo. D - Energia dissipativa. P0 -Amplitude da força aplicada z – desenvolvimento em altura v – velocidade de vento vm – velocidade média. 17.
(18) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. σv – desvio padrão da turbulência vb,0 – valor básico da velocidade de referência vb – velocidade de referência cdir – coeficiente de direção cseason – coeficiente de sazão cr – coeficiente de rugosidade co – coeficiente do orografia z0 – comprimento de rugosidade kr – coeficiente de terreno Iv – intensidade de turbulência na direção de propagação do vento. 18.
(19) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 1 INTRODUÇÃO 1.1. ASPETOS GERAIS Durante o período de vida útil de uma estrutura, esta é solicitada por diversos tipos de ações, as ações estáticas, como o peso próprio ou outras cargas permanentes e sobrecargas, e as ações dinâmicas como o vento, sismos e outras solicitações variáveis no tempo. São estas últimas as ações que provocam deslocamentos horizontais e fadiga nas estruturas, tornando assim relevante a análise das mesmas em termos de resposta (deslocamentos e acelerações) da estrutura e consequentemente a redução e controlo destes mesmos deslocamentos. O interesse de controlar as respostas dinâmicas em estruturas de engenharia civil é verificado em várias vertentes, desde a reabilitação de edifícios existentes, tornando-os aptos a novos níveis de exigência em estado de serviço sob a ação do vento, a garantia de não colapso de estruturas fundamentais no funcionamento de uma cidade na ocorrência de sismos de grande intensidade, até à economia de materiais na construção das estruturas garantindo a estabilidade das mesmas através de sistemas com dispositivos não incluídos na estrutura original. Este controlo pode ser materializado de várias formas, designadamente atuando sobre as características próprias da estrutura, alterando a sua frequência própria ou rigidez, embora esta alteração seja muitas vezes difícil de concretizar devido a restrições arquitetónicas e de material. Outra forma de controlo, esta mais viável e de utilização corrente, consiste na introdução de aparelhos próprios que formam sistemas de controlo externo, existindo dois tipos principais de sistemas, os sistemas de controlo passivo e os sistemas de controlo ativo. Outras variantes destes são os sistemas semi-ativos e os sistemas híbridos. As técnicas passivas de controlo utilizam dispositivos que não necessitam de fontes de energia exteriores para funcionarem. Exemplos correntes destes sistemas passivos são os isoladores de base, amortecedores de massa sintonizada também conhecidos como tuned mass dampers (TMD) ou amortecedores de líquido sintonizado tuned liquid dampers (TLD). Os isoladores de base estão direcionados apenas para o controlo de respostas dinâmicas em caso de ocorrência de sismo, e o princípio de funcionamento destes isoladores baseia-se no aumento da frequência da estrutura, através da introdução de blocos de grande rigidez vertical e reduzida rigidez horizontal nas ligações da estrutura às fundações. No caso dos TMD’s é utilizada tipicamente uma massa que pode ser um bloco de betão ou até mesmo um depósito de água, sendo esta massa secundária ligada à estrutura principal através de molas e pequenos amortecedores adicionais que conferem ao sistema total a capacidade dissipativa necessária para que a estrutura tenha uma resposta satisfatória quando submetida a ações dinâmicas. Os TLD’s são um caso particular dos TMD’s nos quais o líquido é utilizado de modo a conferir todas as características necessárias à estrutura secundária, tais como massa e capacidade de amortecimento através de ações de amortecimento viscoso. O amortecimento ativo visa impor forças ou deslocamentos, em pontos estratégicos da estrutura de acordo com medições efetuadas em tempo real ou de acordo com um histórico de medições. Este sistema requer um sistema de sensores, processamento de sinais, estratégia de controlo e um sistema que acione respostas em tempo real, ou seja uma importante fonte de energia externa[2]. 19.
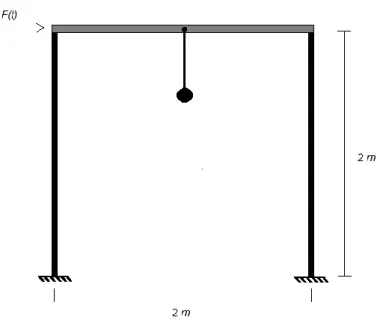
(20) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Os sistemas semi-ativos combinam as principais vantagens dos sistemas ativos e passivos, necessitam de menor quantidade de energia exterior, podendo até funcionar com recurso a pilhas e a baterias, o que os torna muito eficazes em caso de falhas gerais de distribuição de energia. Os sistemas híbridos consistem na maioria dos casos no funcionamento simultâneo dos sistemas passivos e ativos. Este trabalho debruça-se essencialmente no funcionamento dos TMD’s, e em particular no caso dos TMD’s pendulares, em que o TMD se materializa numa massa (normalmente esférica) presa à extremidade de um fio, formando um pêndulo, fixo à estrutura. A característica principal do pêndulo é a sua frequência de oscilação que depende inteiramente do comprimento do fio (quando a massa do fio é desprezável e não existe rigidez rotacional), o que requer muitas vezes comprimentos de fio excessivamente grandes. Quando não é possível implementar o comprimento que conduziria a uma sintonização perfeita, é possível obter resultados positivos para certos casos, ainda que o pêndulo não esteja a funcionar na sua máxima eficiência, como é demonstrado mais adiante neste trabalho.. 1.2. SÍNTESE DE OBJETIVOS O principal objetivo do presente trabalho é analisar a eficiência da utilização de TMD’s pendulares na atenuação de respostas dinâmicas em estruturas de engenharia civil e estudar os critérios envolvidos no dimensionamento deste tipo de dispositivos. Para o estudo da eficiência dos TMD’s pendulares, é necessário averiguar o tipo e a escala de valores de vibrações, a que uma estrutura real pode estar sujeita, para saber até que ponto estas mesmas vibrações são atenuadas e se se justifica ou não a utilização deste tipo de dispositivos.. 1.3. ESTRUTURA DO TRABALHO Após uma breve introdução sobre o controlo estrutural, descrevendo os vários tipos de controlo em particular o controlo passivo, e descrevendo o interesse prático de utilizar mecanismos adicionais que reduzem a resposta dinâmica estrutural, procede-se ao estudo por capítulos dos diferentes temas propostos para o presente trabalho. Esta dissertação está dividida em 6 capítulos, o segundo capítulo descreve os vários tipos de controlo de vibrações existentes, os ativos, os semi-ativos, os híbridos e os passivos; dentro da temática do controlo passivo são abordadas algumas aplicações de TMD pendulares em estruturas reais. No terceiro capítulo são expostos os fundamentos teóricos e a formulação matemática inerente à redução do fator de amplificação dinâmica e consequentemente da resposta dinâmica por meio da utilização de amortecedores de massa sintonizada (tuned mass damper TMD), quer em estruturas não amortecidas, quer em estruturas amortecidas e é demonstrado como se obtêm os valores ótimos para esses mesmos TMD’s. É também descrita a formulação matemática associada ao movimento de um pêndulo quando este se encontra isolado e quando este está acoplado a uma outra estrutura que também está em movimento segundo uma só direção. No quarto capítulo são construídos casos simples de pórticos, com um ou vários pisos, de apenas um vão, em que se aplicam cargas harmónicas idealizadas, com o propósito de demonstrar a aplicabilidade deste tipo de TMD e de discutir a variação de alguns parâmetros deste TMD. É estudada também a eficiência da utilização de mais do que um TMD pendular em simultâneo.. 20.
(21) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. No quinto capítulo são aplicados os procedimentos estudados para o dimensionamento de um TMD numa estrutura real. Trata-se de uma parede de reação de um banco de ensaios na trofa que está a ser projetada no âmbito do VHSSPOLES. A parede é estudada a duas dimensões e analisada numa só direção; são dimensionadas as ações do vento, segundo a geometria da parede de reação e a sua localização geográfica, e são calculadas respostas dinâmicas desta parede sem TMD pendular e com TMD pendular. Por fim, no sexto capítulo, são apresentadas as principais conclusões e faz-se uma sugestão para futuros desenvolvimentos dos diferentes temas abordados ao longo deste trabalho.. 21.
(22) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 22.
(23) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 2 SISTEMAS DE CONTROLO DE VIBRAÇÕES - ESTADO DA ARTE. 2.1. INTRODUÇÃO O controlo estrutural tem ganho, nos últimos anos, uma maior projeção e tem sido alvo de inúmeros estudos, devido em grande parte à necessidade crescente do seu uso. As inovações tecnológicas permitem construir edifícios cada vez mais altos, estruturas cada vez mais flexíveis e permitem também poupar em materiais apesar de exigirem também em muitos casos um controlo adicional das vibrações e dos deslocamentos. O controlo adicional visa não só para garantir o nãocolapso, mas também garantir que se cumprem os valores estipulados nas normas para os deslocamentos máximos em serviço e que, no caso de estruturas habitáveis, o conforto humano e a sensação de segurança sejam assegurados. O controlo estrutural, que se pode materializar quer por dispositivos externos, quer por meio de ações de forças externas, atua alterando algumas propriedades da estrutura, nomeadamente a sua rigidez e amortecimento. O controlo pode ser classificado em passivo, ativo, semi-ativo e hibrido. 2.2. SISTEMAS DE CONTROLO ATIVO O controlo ativo é essencialmente um sistema que aplica forças à estrutura através de dispositivos que são alimentados por fontes externas. O valor dessas mesmas forças é calculado a cada instante, baseado nos valores da resposta recolhidos pelos sensores e calculado matematicamente em tempo real por um computador que utiliza algoritmos de controlo ativo que visam reduzir os deslocamentos e fazer com que a resposta da estrutura siga uma determinada lei ou trajetória. A grande vantagem deste sistema de controlo é não possuir as limitações do controlo passivo, que apenas permite a sintonização exclusiva de cada TMD a uma só frequência. Este sistema adaptase em tempo real às características da ação dinâmica e da própria estrutura. Apresenta no entanto a fragilidade de necessitar de energia externa em quantidades significativas, o que durante um evento como o caso de um sismo de grande intensidade, nem sempre é garantido. Considera-se, por isso, muitas vezes a utilização de dispositivos dissipadores de energia em simultâneo com o sistema de controlo ativo. [3] A figura 2.3 serve para esquematizar o funcionamento dos sistemas de controlo ativo, Tal como já foi referido, o esquema de funcionamento passa pela existência de sensores que medem tanto o valor da excitação a que a estrutura está a ser submetida, como a resposta da estrutura a essa excitação. É também necessária a existência de dispositivos que processem os dados recebidos pelos sensores, o input, e que, através dos algoritmos, tenham como output o valor das forças de controlo a aplicar pelos atuadores na estrutura.. 23.
(24) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Figura 2.1 Esquema ilustrativo do funcionamento de um sistema de controlo ativo [1]. 2.3. SISTEMAS DE CONTROLO SEMI-ATIVO. Os sistemas de controlo semi-ativo são sistemas passivos melhorados. Estes sistemas, com o objetivo de melhorar a performance dos sistemas passivos, incluem sistemas que adaptam as suas características de amortecimento baseados em informação recolhida da excitação e da resposta estrutural. Os componentes deste sistema incluem, tal como no caso dos sistemas ativos, sensores e dispositivos para processar a informação e gerar sinais que são lidos pelos atuadores. A grande diferença deste tipo de sistemas, em relação aos sistemas de controlo ativo, é que em vez de aplicar diretamente uma força à estrutura principal, o atuador é utilizado apenas para alterar as características dos dispositivos de amortecimento passivo. A energia requerida para este tipo de sistemas é muito inferior àquela que os sistemas ativos consomem, bastando o uso de baterias, o que se torna vantajoso em caso de falha energética devido à ocorrência de sismos ou desestabilização da estrutura principal. Este tipo de dispositivos apresenta no entanto a limitação de apenas adaptar as suas características a cada ação dinâmica continuando na sua essência a funcionar como um dispositivo passivo. Ainda assim é uma técnica de controlo que combina os aspetos positivos dos sistemas ativos e passivos, e que por isso tem vindo a ser cada vez mais estudada e aplicada [4].. 2.4. SISTEMAS DE CONTROLO HÍBRIDO. Os sistemas ativos são utilizados para compensar as limitações dos sistemas passivos e semi-ativos, mas a sua operabilidade depende principalmente de fontes de energia externa o que também representa uma limitação e para além disso necessitam de equipamentos que tenham capacidade de gerar forças de grande escala, o que não é possível conseguir sem custos avultados.. 24.
(25) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Por estas razões os três grupos principais, passivo, semi-ativo e ativo podem ser combinados entre si e utlizados em conjunto, de modo a combinar as vantagens associadas a cada um. Por exemplo os dispositivos passivos podem ser utlizados para garantir a maior parcela da redução necessária da resposta, enquanto os dispositivos ativos são utilizados apenas para garantir um ajustamento final e garantir que a estrutura permanece em qualquer instante dentro dos deslocamentos máximos desejados. O sistema de controlo híbrido será o mais adequado se por exemplo dentro da estrutura principal houver equipamentos extremamente sensíveis e de custos elevados. Apesar de serem sistemas mais fiáveis e que requerem menos custos, são sistemas que ainda assim necessitam de uma quantidade significativa de energia externa[4].. 2.5. SISTEMAS DE CONTROLO PASSIVO. Os sistemas de controlo passivo consistem na adição de um ou mais dispositivos à estrutura principal, estes sistemas absorvem parte da energia transmitida pelas ações dinâmicas, reduzindo a necessidade de dissipação dessa mesma energia pelas ligações e outros pontos mais frágeis da estrutura principal [5]. Este tipo de sistemas de controlo não utiliza nenhuma fonte de energia externa, toda a energia que é dissipada ou utilizada para iniciar movimentos nos dispositivos passivos, tem origem nas vibrações da estrutura principal, ou tem origem diretamente nas ações dinâmicas que estão a afetar a estrutura principal. Devido à maior facilidade de instalação e dos reduzidos gastos em manutenção, continua a ser o sistema de controlo mais utilizado nas estruturas da engenharia civil.. 2.5.1. ISOLAMENTO DE BASE. O isolamento de base é uma técnica usada especialmente no controlo de vibrações devido a ações sísmicas. O princípio de funcionamento destes sistemas de isolamento assenta na tentativa de tornar o movimento horizontal da estrutura o mais independente possível do movimento horizontal do solo. É possível aplicar este conceito na prática, através da eliminação de parte das ligações horizontais da estrutura ao solo de fundação ou na colocação de dispositivos de apoio com baixa rigidez lateral entre a estrutura e a fundação, a figura 2.1 é um exemplo de um destes dispositivos. É necessária uma cuidada avaliação destes dispositivos de apoio, quer pelo facto de estes terem de assegurar a estabilidade da estrutura na direção vertical. Quer pela possibilidade de ocorrência de grandes deslocamentos ao nível da base, devido à pequena rigidez dos blocos de apoio, fazendo com que a frequência fundamental da estrutura seja muito baixa; aumentando desta forma a sua suscetibilidade às ações do vento [3].. 25.
(26) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Fig. 2.2- Esquema ilustrativo de um dispositivo isolador de base. 2.5.2. AMORTECEDORES DE MASSA SINTONIZADA TUNED MASS DAMPERS (TMD) Este sistema passivo é um dos mais correntemente utilizados, devido à multiplicidade de estruturas em que pode ser aplicado, e também devido ao facto de este dispositivo ser adequado para atenuar vibrações e deslocamentos devidos a ações dinâmicas de várias origens. O objetivo principal dos TMD’s é a transferência de energia de vibração da estrutura principal para a estrutura secundária formada pelo TMD, que é na sua forma mais simples uma massa auxiliar, ligada à estrutura principal por um sistema de molas e amortecedores. Cada TMD só pode ser sintonizado para uma frequência de vibração, através do cálculo da estrutura para um grau equivalente e respetiva sintonização do TMD à estrutura idealizada, obtém-se na generalidade dos casos a redução de deslocamentos desejada, se tal não se verificar pode-se controlar mais do que um modo de vibração usando múltiplos TMD’s (MTMD’s) [6]. O conceito atual de amortecedores de massa sintonizada tem origem nos estudos de supressores de vibrações para ações dinâmicas, e o primeiro registo sobre o assunto remonta a 1909 num artigo em que Frahm descreve o uso destes supressores, embora só em 1928 tenha sido publicada a primeira descrição matemática do funcionamento destes aparelhos da autoria de Den Hartog (Ormondroyd and Den Hartog, 1928) [7]. A figura que se segue (figura 2.3) é a representação esquemática do aparelho supressor de vibrações de Frahm, consistindo numa pequena massa m ligada por uma mola de rigidez k à estrutura principal que é formada pela massa M e pela mola de rigidez K. Considerando uma carga harmónica simples, é facilmente demonstrável que a massa principal M pode permanecer estática quando a frequência natural da massa secundária modo a igualar a frequência de excitação da estrutura principal.. 26. √. é escolhida de.
(27) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Fig. 2.3- Esquema ilustrativo do aparelho supressor de vibrações de Frahm. Den Hartog (Ormondroyd and Den Hartog, 1928) estudou a teoria dos supressores amortecidos e não amortecidos no caso do sistema principal ser não amortecido. Posteriormente o amortecimento na estrutura principal foi incluído nos estudos de Falcon et al (1967), em que o sistema secundário é sintonizado de modo a obter-se o mínimo pico de resposta e máxima eficiência no amortecimento da estrutura principal, já que não é possível anular por completo os deslocamentos da estrutura principal quando esta é amortecida. Com o objetivo de aumentar a eficiência do supressor na redução da resposta dinâmica do sistema principal, os investigadores tentaram alargar a banda de frequências de sintonização do sistema secundário com a introdução de supressores não lineares Roberson (1952). Mais atualmente estudos foram realizados no sentido de incluir não linearidades no estudo dos TMD’s, nomeadamente Borges (2008) que incluiu o efeito da não linearidade na rigidez do sistema e a partir daí verificou como tal efeito aumenta a eficiência do dispositivo na banda de frequências para o qual está destinado [8]. Como na prática as estruturas de engenharia civil estão sujeitas a ações dinâmicas de várias frequências e com variações no tempo difíceis de prever, como é o caso do vento e dos sismos, a proposta apresentada anteriormente por Den Hartog (caso simples de um supressor sintonizado numa só frequência) não tem aplicabilidade absoluta, pelo que existem hoje metodologias para dimensionamento e localização de múltiplos TMD’s (MTMD’s). Estas são metodologias que requerem cálculos de extrema complexidade [6]. E, como foi dito anteriormente, quando é possível usar o modelo equivalente de um grau de liberdade e utilizar apenas um TMD e alcançar os resultados pretendidos, é na maioria dos casos, a alternativa eleita.. 27.
(28) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 2.5.2.1. AMORTECEDORES. DE MASSA SINTOZINADA PENDULARES PENDULUM TUNED MASS DAMPERS (PTMD). Umas das geometrias possíveis de um TMD é o formato de pêndulo, o pêndulo é preso à estrutura e o movimento da mesma provoca o movimento oscilatório do pêndulo, transferindo parte da energia de um sistema para o outro, reduzindo a quantidade de energia que os elementos estruturais necessitam dissipar. Este tipo de amortecedor tem a sua frequência de vibração dependente essencialmente do comprimento do seu cabo e só pode ser considerado um oscilador linear quando as amplitudes de vibração são menores que 2º. Um exemplo muito conhecido deste tipo de TMD é o edifício Taipei com 101 andares e quase meio quilómetro de altura, localizado em Taipei, Taiwan. Nesta região ocorrem frequentemente sismos e tufões, por isso este edifício teve que ser projetado de forma especial. A companhia de engenharia Evergreen juntamente com os engenheiros Thornton e Tomasetti projetaram um amortecedor pendular de aço de 660 toneladas e um custo de 4 milhões de dólares. Suspenso do 92º piso para o 88º piso, o pêndulo oscila para amortecer os movimentos do edifício, atingindo eficiências na ordem dos 60% na redução de oscilações.. Fig. 2.4- TMD pendular do edifício Taipei, localizado em Taiwan. 28.
(29) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 3 FUNDAMENTOS TEÓRICOS E FORMULAÇÃO MATEMÁTICA 3.1. INTRODUÇÃO Neste capítulo irão ser abordados alguns aspetos teóricos, como o fator de amplificação dinâmica e os parâmetros de que este depende, quer em estruturas sem amortecimento estrutural quer em estruturas com amortecimento. Abordam-se as equações de Den Hartog que traduzem a redução do fator de amplificação dinâmica da estrutura, apenas quando se considera que esta não tem amortecimento estrutural, mediante a presença de um dispositivo simples constituído por: uma mola, uma massa concentrada e o coeficiente de amortecimento próprio. De seguida, apresentam-se os desenvolvimentos matemáticos nesta área, em que se passa a considerar o amortecimento estrutural na determinação da redução do fator dinâmico, e ainda os fundamentos teóricos para a rápida determinação dos parâmetros ótimos de um amortecedor de massa sintonizada. Apresentam-se os princípios da dinâmica que permitem simplificar sistemas e construir modelos de um grau de liberdade equivalente. Abordam-se também as especificidades da formulação matemática dos pêndulos e a forma como os parâmetros ótimos determinados para os TMD’s gerais podem ser encontrados para o caso especifico do pêndulo. 3.2. FATOR DE AMPLIFICAÇÃO DINÂMICA E A SUA REDUÇÃO POR MEIO DE UM AMORTECEDR DE MASSA SINTONIZADA. 3.2.1. EM ESTRUTURAS SEM AMORTECIMENTO. Em seguida apresentam-se os desenvolvimentos de Den Hartog na avaliação da eficiência na redução da resposta da estrutura principal, nas seguintes condições: quando esta é considerada não ( f P0 sin w t ) amortecida e quando está sujeita a uma força de excitação sinusoidal de frequência w . Nesta avaliação o efeito dinâmico do TMD é medido em comparação com o deslocamento estático provocado pela máxima força aplicada na estrutura, sendo que para uma força sinusoidal o valor do P deslocamento estático é y st 0 e o fator de amplificação dinâmica R é: K. y ( 2 2 ) 2 (2 a ) 2 R max y st [( 2 2 ) 2 (1 2 ) 2 2 2 ]2 (2 a ) 2 (1 2 2 ) 2. (3.1). 29.
(30) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Sendo:. . w - Razão entre a frequência de excitação e a frequência natural da estrutura principal ws. . wa - Razão entre a frequência natural do TMD e a frequência natural da estrutura principal ws. wa . k -Frequência natural do TMD m. ws . K -Frequência natural da estrutura principal M. C C -Coeficiente de amortecimento do TMD Cc 2mwa. a . m M. - Razão entre a massa do sistema adicional e a massa do sistema principal. O fator de amplificação dinâmica depende essencialmente de quatro variáveis, µ, β, a and , para uma melhor perceção da sensibilidade deste fator às alterações dos valores destas variáveis observa-se a figura 3.1, onde estão desenhados vários gráficos de valores de R em função da razão de frequência β. Para valores fixos de α (α=1 caso de ressonância) e de µ=0,05 atribuindo diferentes valores ao valor do coeficiente .. 18 16 14 12 R. 10 8. ζ_a = 0. P. ζ_a = 0,1. 6. Q. 4 2 0,50 0,55 0,60 0,65 0,70 0,75 0,80 0,85 0,90 0,95 1,00 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 1,45 1,50. 0 β Fig. 3.1– Fator de amplificação dinâmica fixando os valores de α=1 e µ=0,05. 30. ζ_a = 0,33 ζ_a = ∞.
(31) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. No caso de o TMD não ter qualquer amortecimento ou seja a 0 , existem dois pontos de ressonância em que o fator de amplificação dinâmica é infinito, pontos esses em que a frequência da força de excitação iguala a frequência da estrutura combinada com o TMD. No caso de o coeficiente de amortecimento tender para infinito, as duas estruturas, a estrutura principal e o TMD, passam a funcionar como uma só e o resultado é um sistema de apenas um grau de liberdade, em que o fator de amplificação atinge o infinito num único ponto de ressonância. Como é logico, o objetivo de adicionar um TMD é reduzir os valores máximos, ou seja os picos de resposta da estrutura principal ao menor valor possível, ora uma redução no fator de ampliação dinâmica ao menor valor possível traduz precisamente esse propósito. Observa-se no gráfico da figura 3.1 que existem dois pontos, o ponto Q e P, assinalados na figura, em que o valor da amplificação dinâmica (FAD) é o mesmo qualquer que seja o valor do coeficiente de amortecimento do TMD ( ), ou seja é independente do mesmo. Se estes dois pontos forem ajustados, através da escolha de valores ótimos para as variáveis , e a , de modo a terem o mesmo valor de FAD, isto é, a mesma altura no gráfico e a serem os máximos valores do gráfico, consegue-se obter o valor mínimo possível de resposta dinâmica em próximo da unidade. Portanto, segundo Den Hartog, a razão ótima entre a frequência do TMD e a frequência natural da estrutura principal, pode ser obtida seguindo o procedimento apresentado:. opt . 1 1 . (3.2). O que faz com que o valor de R para os pontos Q e P seja:. R 1. 2. . (3.3). Uma boa estimativa para o a ótimo pode ser obtida, impondo que os pontos Q e P correspondam aos máximos valores do fator de amplificação dinâmica. Substituindo a equação 3.2 na equação 3.1, deriva-se em ordem a , iguala-se a derivada a zero e impõe-se Q e P como valores máximos e assim se obtém o valor de a. a opt . 3 8(1 ) 3. (3.4). 31.
(32) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Realizando o processo anteriormente descrito para o valor de 0,05 , obtêm-se os seguintes resultados: 0,95238 R 6,4031 e opt 0,1273 . Através do desenho do gráfico de R com estes valores ótimos obtidos (fig. 3.2), facilmente se chega à conclusão que o processo anterior cumpre os seus objetivos.. 18 16 14 12. R. 10 ζ_a = 0,1. 8. ζ_a = 0,33. 6. ζopt=0,12726. 4 2 0,50 0,57 0,64 0,71 0,78 0,85 0,92 0,99 1,06 1,13 1,20 1,27 1,34 1,41 1,48. 0 β Fig. 3.2 Fator de amplificação dinâmica fixando os valores de α=0.08 e µ=0,05. Durante todo procedimento apresentado acima manteve-se o valor de (razão entre a massa do TMD e a massa da estrutura principal) fixo, mas através da equação 3.3 facilmente se pode concluir que um aumento da massa do TMD reduz o máximo R (FAD) no caso de um TMD otimizado pelo processo descrito [9].. 3.2.2. EM ESTRUTURAS COM AMORTECIMENTO. As estruturas na realidade possuem sempre algum amortecimento, por mais pequeno que seja. Quando se fala em edifícios, pontes, e estruturas de grande porte, é desejável que estas tenham um amortecimento considerável, visto que que as cargas dinâmicas a que estão sujeitas variam significativamente na gama de frequências de excitações, e poderiam existir casos de ressonância preocupantes. A equação (3.1) também pode ser escrita quando o amortecimento da estrutura principal s está presente [3].. y ( 2 2 ) (2 a ) 2 R max y st (2 ) 2 [ a2 ( 2 (1 ) 1) s ( 2 2 ) 2 ] 2 [ 2 2 ( 2 1)( 2 2 ) (2 ) 2 s a ] 2 (3.5). 32.
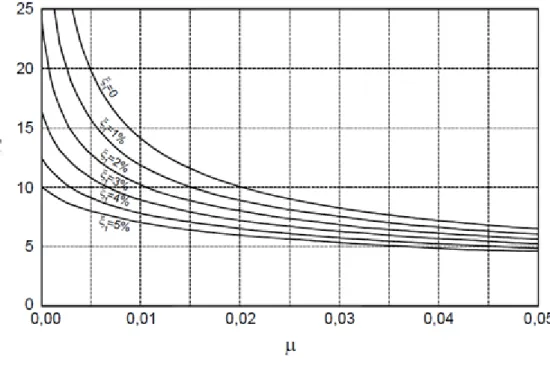
(33) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. No entanto os pontos fixos P e Q que existiam no caso da estrutura principal não ser amortecida, já só existem para valores de amortecimento estrutural inferiores a 1%, nos restantes casos (amortecimento estrutural superior a 1%) deixa de ser possível encontrar estes dois valores fixos. Passa a ser por isso necessário recorrer a outro métodos para encontrar os valores ótimos de e a . Um dos métodos possíveis é o método empírico formulado por (Ioi and Ikea,1978) em que os valores de e a encontrados pelo método descrito anteriormente são corrigidos através das seguintes fórmulas:. ~opt opt (0,241 1,7 2,6 2 ) s (1,0 1,9 2 ) s2. (3.6). a opt a opt (0,13 0,12 0,4 2 ) s (0,01 0,9 3 2 ) s2. (3.7). ~. Onde s é o amortecimento da estrutura principal. Os erros associados às equações descritas acima são menos de 1% para os casos em que 0,03 < <0,40 e 0,0 < s < 0,15, intervalos de valores que na verdade representam os casos de interesse prático [5]. Outro método mais geral, que serve para todos os valores de s , é a consulta de ábacos baseados no estudo da equação 3.5 através de procedimentos numéricos. Na construção destes ábacos, tal como no procedimento descrito para o caso de se considerar a estrutura principal não amortecida, procurou-se que os dois valores máximos do gráfico de amplificação dinâmica estivessem ao mesmo nível e com o menor valor possível. Estes ábacos fornecem a possibilidade de determinação do valor adequado da massa do TMD em função do valor do coeficiente de amortecimento estrutural e dos valores de amplificação dinâmica pretendidos (figura 3.3), o valor ótimo do parâmetro que possibilita a determinação do valor da rigidez do sistema secundário (TMD) (figura 3.4), e ainda o valor ótimo do coeficiente de amortecimento do TMD ( a ) (figura 3.5). Estes dois últimos valores são obtidos nos ábacos em função do parâmetro µ e do valor do coeficiente de amortecimento da estrutura principal ( s )[3]. 33.
(34) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Fig. 3.3 Curvas de amplificação máxima do deslocamento do sistema principal. Fig. 3.4 -Curvas para determinação do valor ótimo de . 34.
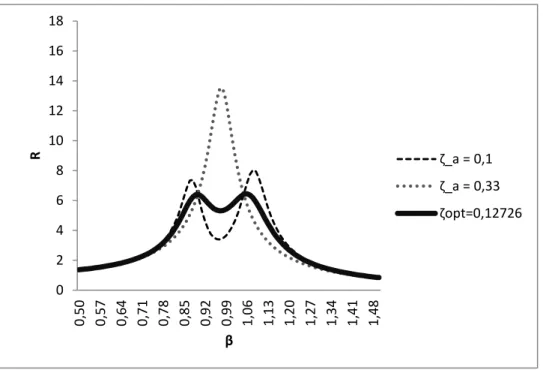
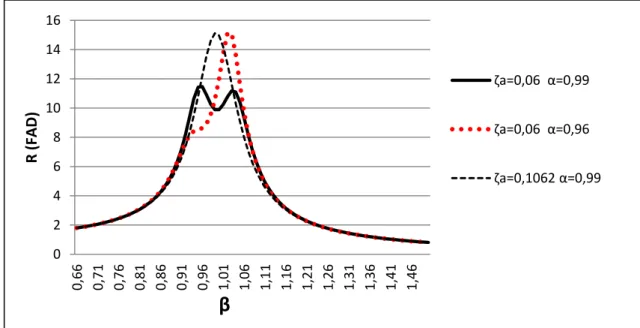
(35) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Fig. 3.5 Curvas para determinação do valor ótimo de ξαopt. Com uma cuidada observação dos gráficos chega-se à conclusão que o fator de amplificação dinâmica é muito mais sensível à variação do valor de do que à variação do valor do amortecimento da estrutura secundária a , provando-se isso mesmo com o desenho das curvas de amplificação dinâmica em função de β variando estes dois parâmetros, e fixando o valor de em 0,01 e do amortecimento estrutural em s 0,01 , figura 3.6.. 16 14 ζa=0,06 α=0,99. 10 ζa=0,06 α=0,96. 8 6. ζa=0,1062 α=0,99. 4 2 0 0,66 0,71 0,76 0,81 0,86 0,91 0,96 1,01 1,06 1,11 1,16 1,21 1,26 1,31 1,36 1,41 1,46. R (FAD). 12. β Fig. 3.6- Fator de amplificação dinâmica fixando os valores de ζs=0,01 e µ=0,01. 35.
(36) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Como se pode ver, encontrando os valores ótimos dos dois parâmetros em questão, a 0,06 e 0,99 , através dos ábacos e desenhando a respetiva curva de FAD, vemos que o valor máximo se situa por volta dos 11,6, ora alterando em apenas 3% o valor de , ou seja passando de 0,99 para 0,96, sem alterar valor de a (fixando-o no valor ótimo encontrado anteriormente), o valor do pico da amplificação dinâmica sobe de imediato para os 15,11. Para que o valor máximo da curva seja também 15,11, mas desta vez só alterando o valor a e fixando o valor de no ótimo, é necessário que o valor a passe a ser 0,1062, o que representa uma variação de 77,36%.. Conclui-se facilmente que a sensibilidade de sintonização do valor de é muito maior do que o valor de a , o que na realidade se traduz numa necessidade de cuidado acrescido na fixação do valor da rigidez do sistema secundário.. 3.3. ANÁLISE ESTRUTURAL DE SISTEMAS DE UM GRAU EQUIVALENTE. A sintonização de um TMD segundo o processo descrito anteriormente é válida apenas para sistemas de um grau de liberdade, como se sabe a maioria das estruturas de engenharia civil têm múltiplos graus de liberdade. Através de uma análise modal é possível obter vários sistemas de um grau de liberdade e sintonizar um TMD para cada um desses sistemas de um grau de liberdade, sendo para isso necessário determinar os valores da massa, rigidez e amortecimento correspondentes a cada modo de vibração. Para o cálculo dos valores da massa, rigidez e amortecimento correspondentes a cada modo de vibração é necessário determinar a configuração dos modos de vibração, o que só é possível arbitrando um dos componentes do modo de vibração, o que possibilita uma infinidade de configurações para cada modo de vibração. Esta infinidade de soluções possíveis conduz a que haja também uma infinidade de valores possíveis para o valor da massa, rigidez e amortecimento, já que a massa modal é definida pelo produto M n nT Mn , a rigidez e amortecimento são definidos de forma análoga. Convém por isso adotar como critério de normalização destas configurações de cada modo a fixação de um valor unitário para o grau de liberdade correspondente à implementação do TMD.[3] Tomando o exemplo de um edifício de vários andares, em que o primeiro modo é o dominante na resposta a ações laterais do vento, estudos feitos por Kwok e Samali, 1995 [10] mostram que modos de vibração controlados por TMD’s experimentam diminuições significativas e que os modos de vibração de ordem superior não são afetados. Tendo em conta o mesmo exemplo, de um edifício de vários andares, sob o efeito agora de uma ação sísmica, estudos feitos por Wirsching and Campbell (1974) [11] com o objetivo de minimizar a resposta para o primeiro modo de vibração, através do dimensionamento dos parâmetros ótimos dos TMD’s para um edifício de um, cinco e dez andares, mostraram que o valor ótimo da rigidez do TMD torna-se cada vez menos sensível à variação do amortecimento estrutural e do parâmetro (razão entre a massa do TMD e a massa da estrutura principal) à medida que o número de andares aumenta e que o valor ótimo do amortecimento do TMD não é sensível ao valor do amortecimento estrutural mesmo para caso de edifícios só com um andar [5].. 36.
(37) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 3.4. FORMULAÇÃO MATEMÁTICA DO MOVIMENTO DE UM PÊNDULO Os TMD’s pendulares apresentam especificidades em relação aos TMD’s comuns, em primeiro lugar está o facto de o TMD pendular não estar ligado por molas ao sistema principal, e daí a sua rigidez não poder ser determinada de forma clássica, já que esta depende do comprimento do fio ou barra(s) que liga(m) a massa secundária à estrutura principal. A formulação matemática dos pêndulos é descrita em seguida: Utilizando as equações de Euler-Lagrange, baseadas no princípio da conservação da energia mecânica, podemos escrever as equações de movimento do pêndulo: Km. l. y. m. Fig. 3.7 – Esquema de um pêndulo simples. L(i ,i , t ) T (mi,i , t ) U (i , t ). (3.8). Sendo T a energia cinética: 1 m l 2 2 2. (3.9). U U g Um. (3.10). T. U a energia potencial total. Cujas componentes são a energia potencial gravítica. U g m g y m g (l l cos( )). (3.11). e a energia potencial elástica de uma mola rotacional hipotética:. Um . 1 K m 2 2. (3,12). 37.
(38) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. O valor aproximado do cosseno e seno de um ângulo pode ser determinado através da expansão das séries de Taylor em torno do ponto zero. Como se trata de um pêndulo linear, os valores esperados para o ângulo, que a barra do pêndulo faz com a vertical que passa no ponto de fixação do pêndulo, são próximos de zeros.. cos( ) 1 . 2. sen ( ) 1 . 2!. 3 3!. . . 4 4!. 5 5!. .... (3.13). .... (3.14). Substituindo a equação (3.13) na equação (3.11):. U g m g (l l [1 . L. 2 2!. ]) m g l. 2 2. 1 1 2 m l 2 K m 2 m g l 2 2 2. (3.15). (3.16). Movimento livre:. L L L ( ) 0 t i i Sendo. (3.17). L U (U m U g ) i i i . . U m U g i i. 1 K m 2 2 m g l 2 2 K m m g l (3.18). e sendo. L T 1 m l 2 2 2 i i. L ( ) m l 2 t i. 38. (3.19).
(39) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Então usando a formulação de Lagrange, a equação do pêndulo na sua forma mais simplificada é a seguinte:. m l 2 ( K m m g l ) 0. (3.20). m * K * 0. (3.21). m* m l 2 I 0. (3.22). K* K m m g l. (3.23). Em que:. Assim sendo a frequência do pêndulo nestas condições é a seguinte:. w. K* m*. km m g l ml2. (3.24). Quando não existe a mola de rigidez w. g l. (3.25). que é a frequência de um pêndulo simples.. Quando o pêndulo está sujeito a uma força exterior Fa (t ) horizontal aplicada por exemplo na extremidade livre do pêndulo, a componente U (energia potencial) passa a ter mais uma parcela, a parcela UM, correspondente a força exterior:. U U g U m U M. (3.26). U M Fa l. (3.27). Em que. O que conduz a que a equação (3.20) tenha, neste caso, mais uma parcela:. m l 2 ( K m m g l ) Fa l. (3.28). 39.
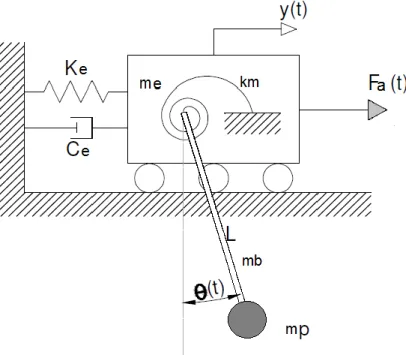
(40) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 3.5. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA AÇÃO HARMÓNICA.. Na figura 3.8 apresenta-se um esquema simples de um sistema de um grau de liberdade, com um pêndulo acoplado, constituindo assim um modelo de dois graus de liberdade. O objetivo deste esquema é representar de forma simplificada as características de estruturas mais complexas, quando apenas se pretende controlar um modo de vibração e se utiliza o processo de um grau de liberdade equivalente. Utiliza-se a configuração de um grau de liberdade equivalente, sendo que K e , C e e m e correspondem respetivamente, à rigidez, amortecimento e massa modal do modo de vibração da estrutura que se pretende controlar. Neste caso a massa do pêndulo não é tratada como apenas uma massa pontual idealizada na extremidade do pêndulo, como é feito na formulação de um pêndulo simples. Nesta modelação o fio do pêndulo, é uma barra rígida com massa não desprezável mb , e a massa é materializada numa esfera de raio R p e massa m p .. Fig. 3.8 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma força harmónica Fa(t). Utilizando de novo as equações de Lagrange para obter as equações de movimento livre da estrutura total composta pela estrutura principal e pelo sistema do pêndulo.. d T T U D ( ) Fa dt q i qi qi q i. 40. (3.29.
(41) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Sendo o vetor de forças exteriores que atuam sobre o sistema e um qualquer grau de liberdade generalizado (que neste caso pode corresponder a - deslocamento horizontal do sistema - ou a ângulo formado pelo pêndulo, medido pela vertical que passa no seu ponto de suspensão) Sendo T a equação da energia cinética correspondente ao sistema da fig.3.8 tem-se:. 1 1 1 2 1 T (me mb m p ) y 2 ( mb lb2 m p R 2p m p ( R p lb ) 2 ) 2 (m p ( R p lb ) mb lb ) y cos 2 2 3 5 2 (3.30) Em que mb é a massa da barra do pêndulo, m p é a massa da esfera do pêndulo, lb é o comprimento da barra do pêndulo e R p é o raio da esfera do pêndulo. Sendo U a equação da energia potencial tem-se:. U . 1 1 1 K e y 2 k m 2 (m p ( R p lb ) mb lb ) g cos 2 2 2. (3.31). Em que k m é a rigidez da mola rotacional ligada ao pêndulo E sendo D a energia dissipativa do sistema tem-se:. D Quando qi y. 1 Ce y 2 2. (3.32). m m d T ( ) (me mb m p ) y cos( ) (( b m p )l b m p R p ) l b ( b m p ) m p R p ) 2 sin( ) dt y 2 2. T 0 y U K e y y D C e y y Quando qi d T 1 2 1 1 ( ) ( mb l b2 m p R 2p m p ( R p l b ) 2 (m p ( R p l b ) mb l b ) y cos( ) (m p ( R p l b ) mb l b ) sin( ) y dt 3 5 2 2. T 1 (m p ( R p l b ) mb l b ) y sin( ) 2 U 1 km (m p ( R p lb ) mblb ) g sin( ) 2. D 0 . 41.
(42) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Tendo em conta os cálculos anteriores e considerando válida a hipótese de pequenos ângulos para o movimento do pêndulo: Em que cos( ) 1 , sin( ) e 2 0 As equações de movimento tomam a seguinte forma:. 1 (me mb m p ) y (m p ( R p lb ) mblb ) Ce y K e y Fa (t ) 2 1 2 1 1 ( mb l b2 m p R 2p m p ( R p l b ) 2 ) (m p ( R p l b ) mb l b ) y k m (m p ( R p l b ) mb l b ) g 0 3 5 2 2 Chega-se a conclusão de que quando consideramos uma barra rígida com massa não desprezável, e que a massa principal não é uma massa pontual idealizada mas assume uma forma esférica, situação mais próxima da realidade, a frequência do pêndulo, parâmetro de extrema importância na sintonização do TMD com a estrutura principal, passa a ser:. W . me mb m p 1 m p ( R p lb ) mb lb 2 . km (m p ( R p lb ) . 1 mblb ) g 2. 1 2 mblb2 m p R 2p m p ( R p lb ) 2 3 5. (3.33). 1 0 m p ( R p lb ) mb lb y f y Ce 0 y K e 2 a 1 1 k m (m p ( R p lb ) mb lb ) g 0 2 2 2 2 0 0 0 mb lb m p R p m p ( R p lb ) 2 3 5 . Se f a for uma ação harmónica a equação pode ser resolvida seguindo os passos usuais na resolução de múltiplos graus de liberdade para ações harmónicas, se for um impulso variável no tempo terá que ser usado por exemplo um integral de Duhamel depois das equações serem desacopladas.. 42.
(43) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. 3.6. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA EXCITAÇÃO NA BASE. Utilizando o mesmo esquema da figura 3.8, em que se constrói um modelo de um grau de liberdade, simulando a configuração de um grau de liberdade equivalente (para estruturas mais complexas), ao qual está acoplado um pêndulo cuja barra é rígida e tem massa não desprezável e a sua massa principal é materializada através de uma esfera de dimensões também não desprezáveis. Modifica-se a natureza da ação que atua sobre o sistema, passando de uma ação harmónica atuando diretamente no sistema, para uma excitação na base sobre a qual o sistema está apoiado, figura 3.9.. Fig. 3.9 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma excitação na base. Tendo em conta os cálculos efetuados para o caso anterior, o de uma ação harmónica, e sabendo que a equação de equilíbrio dinâmico no caso de aceleração do solo é a seguinte [12]:. m u cu ku mug. Sendo u g (t ) o deslocamento do solo, u (t ) o deslocamento relativo da estrutura em relação ao solo e. u t (t ) o deslocamento absoluto da estrutura.. (me mb m p ) y (m p ( R p lb ) . 1 1 mb lb ) (m p ( R p lb ) mb lb ) 2 Ce y K e y (me mb m p ) yg 2 2. 1 2 1 1 ( mb l b2 m p R 2p m p ( R p l b ) 2 ) (m p ( R p l b ) mb l b ) y k m (m p ( R p l b ) mb l b ) g 3 5 2 2 (m p ( R p l b ) . 1 mb l b ) y g 2. 43.
(44) Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares. Neste caso y é o deslocamento relativo entre o sistema e o apoio, y g é o deslocamento do apoio e yt é o deslocamento absoluto do sistema. A frequência do pêndulo em nada se altera com a mudança do tipo de ação que atua sobre o sistema.. 44.
Imagem
![Figura 2.1 Esquema ilustrativo do funcionamento de um sistema de controlo ativo [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15482349.1038457/24.892.225.618.123.398/figura-esquema-ilustrativo-do-funcionamento-sistema-controlo-ativo.webp)

+7
Documentos relacionados