DEPARTAMENTO DE ENGENHARIA EL´ETRICA - DEE
MESTRADO EM AUTOMAC¸ ˜AO INDUSTRIAL
CONTROLE EM MODOS DESLIZANTES DO SERVOMOTOR C.A.
MARCOS FERG ¨UTZ
DEPARTAMENTO DE ENGENHARIA EL´ETRICA - DEE
MESTRADO EM AUTOMAC¸ ˜AO INDUSTRIAL
DISSERTAC¸ ˜AO DE MESTRADO
Mestrando: Marcos Ferg¨utz
Graduado em Engenharia El´etrica - FEJ/CCT/UDESC
CONTROLE EM MODOS DESLIZANTES DO SERVOMOTOR C.A.
DISSERTAC¸ ˜AO APRESENTADA PARA
OBTENC¸ ˜AO DO T´ITULO DE MESTRE
EM AUTOMAC¸ ˜AO INDUSTRIAL PELA
UNIVERSIDADE DO ESTADO DE SANTA
CATARINA/CENTRO DE CIˆENCIAS
TEC-NOL ´OGICAS/FEJ, ORIENTADA PELO PROF. DR. ALCINDO DO PRADO JR. E CO-ORIENTADA PELO PROF. MSc. LUIZ CARLOS DE SOUZA MARQUES.
MARCOS FERG ¨UTZ
Esta disserta¸c˜ao foi julgada adequada para a obten¸c˜ao do t´ıtulo de MESTRE EM AUTOMAC¸ ˜AO INDUSTRIAL
ˆenfase em Controle de Sistemas Dinˆamicos e aprovada em sua forma final pelo Programa de P´os-Gradua¸c˜ao da Universidade do Estado de Santa Catarina.
Prof. Alcindo do Prado JR., Dr. Orientador
Prof. Marcelo da Silva Hounsell, Dr. Coordenador dos Cursos de P´os-Gradua¸c˜ao
BANCA EXAMINADORA:
Prof. Alcindo do Prado JR., Dr. Prof. Luiz Carlos de Souza Marques, Msc.
Presidente Co-Orientador
pela mulher e companheira que ´es.
Agrade¸co ao Prof. Dr. Alcindo do Prado Jr., pelo apoio e coopera¸c˜ao na orienta¸c˜ao deste trabalho.
Sou profundamente grato ao Prof. Msc. Luiz Carlos de Souza Marques, que na quali-dade de co-orientador deste trabalho empenhou dedica¸c˜ao e competˆencia na condu¸c˜ao desta pesquisa. Agrade¸co, sobretudo, sua amizade e confian¸ca.
Agrade¸co, de maneira especial, ao Prof. Bertoldo Ign´acio Ferg¨utz, meu pai, pela con-tribui¸c˜ao ´ımpar na revis˜ao do texto.
Agrade¸co ao Prof. Oscar Ferg¨utz, meu irm˜ao, pela sua valiosa coopera¸c˜ao na revis˜ao do artigo e do abstract.
Sou muit´ıssimo grato a todos os companheiros do Departamento de Engenharia El´etrica da UDESC que acreditaram nas minhas potencialidades e apoiaram o meu aperfei¸coamento profissional. A conclus˜ao deste trabalho ´e, certamente, uma vit´oria deste grupo.
Agrade¸co a todos os demais familiares e amigos que pacientemente torceram e acreditaram no ˆexito deste trabalho.
Este trabalho apresenta um estudo sobre o controle descont´ınuo por modos deslizantes aplicado ao motor s´ıncrono de ´ım˜a permanente, tamb´em denominado de servo motor C.A.. Os objetivos maiores do trabalho s˜ao dois: o primeiro ´e analisar a robustez da t´ecnica frente `
a perturba¸c˜oes de carga e nas resistˆencias estat´oricas; o segundo objetivo, ´e o estudo de alternativas para a redu¸c˜ao do “chattering”. A primeira parte do trabalho inclui um estudo sobre a modelagem do motor s´ıncrono convencional e do motor `a ´ım˜a permanente, ambos de p´olos salientes. Os objetivos buscados s˜ao o estudo de modelos utilizados para o controle do movimento das referidas m´aquinas no referencial s´ıncrono ortogonal. Na segunda parte desenvolvemos um estudo sobre o controle por modos deslizantes de primeira ordem, incluindo o m´etodo de minimiza¸c˜ao do chaveamento em alta freq¨uˆencia (“chattering”). Apresentamos resultados de simula¸c˜ao que comprovam a eficiˆencia das t´ecnicas aplicadas. Na terceira parte estudamos o controle por modos deslizantes de ordem superior, objetivando minimiza¸c˜ao do “ chattering”. S˜ao desenvolvidos os conceitos para um controlador de 2a. ordem. Apresentamos resultados de simula¸c˜ao que comprovam a eficiˆencia do controlador.
This work presents a study about non-continuous sliding modes control applied to Per-manent Magnetic AC motor (PMAC), also called AC Servomotor. The two main objectives of this work are: to analise the robustness of the technique related to load disturbance and variations in the windings resistance; and to study alternative ways to reduce chattering. The first part includes a study about the modeling of conventional synchronous motors and PMAC motors, both with salient poles. The aim is to study the models used in the movement control of the referred motors in the synchronous reference frame. The second part presents a study about first order sliding modes control, including a method of high frequency switching (chattering)minimization. Simulation results are presented that confirm the efficiency of the techniques applied. Finally, in the third part we study higher order sliding modes control, aiming at chattering minimization. The concepts developed are those for a 2nd order control. Again, simulation results are presented that confirm the efficiency of the techniques applied.
Introdu¸c˜ao Geral 11
1 Modelamento do Motor S´ıncrono 15
1.1 Introdu¸c˜ao . . . 15
1.2 Motor S´ıncrono de P´olos Salientes Convencional . . . 15
1.3 Motor com Rotor a ´Im˜a Permanente . . . 27
1.4 Conclus˜ao . . . 30
2 Modos Deslizantes de 1a. Ordem 32 2.1 Introdu¸c˜ao . . . 32
2.2 O Controle por Modos Deslizantes Convencional . . . 32
2.2.1 Formula¸c˜ao do Problema de Controle . . . 32
2.3 Redu¸c˜ao do Chattering . . . 37
2.3.1 Altera¸c˜oes da Lei de Controle . . . 37
2.4 Aplica¸c˜ao ao Motor S´ıncrono . . . 40
2.5 Estudo de Simula¸c˜ao . . . 43
2.5.1 Condi¸c˜oes de Simula¸c˜ao . . . 44
2.5.2 Parˆametros do motor . . . 45
2.5.3 Controle com Realimenta¸c˜ao para Simplifica¸c˜ao . . . 46
2.5.4 Controle sem Realimenta¸c˜ao para Simplifica¸c˜ao . . . 59
2.6 Conclus˜ao . . . 64
3 Modos Deslizantes de 2a. Ordem 65 3.1 Introdu¸c˜ao . . . 65
3.4 Resultados da Simula¸c˜ao . . . 72 3.5 Conclus˜ao . . . 76
Conclus˜ao Final 78
1.1 Modelo do motor s´ıncrono de p´olos salientes convencional . . . 16
1.2 Varia¸c˜ao das indutˆancias pr´oprias . . . 18
1.3 Sistemas de coordenadas . . . 22
2.1 Fenˆomeno do chattering . . . 36
2.2 Camada Limite . . . 37
2.3 Fun¸c˜ao sat1(S, x, t)) . . . 39
2.4 Fun¸c˜ao sat2(S, x, t)) . . . 39
2.5 Referˆencia de velocidade . . . 44
2.6 Perturba¸c˜ao de carga . . . 45
2.7 Velocidade do motor e referˆencia . . . 47
2.8 Velocidade do motor e referˆencia (amplia¸c˜ao) . . . 47
2.9 Corrente de eixo direto . . . 48
2.10 Corrente de eixo direto (amplia¸c˜ao) . . . 49
2.11 Corrente de eixo em quadratura . . . 50
2.12 Tens˜ao estat´orica trif´asica . . . 50
2.13 Corrente estat´orica trif´asica . . . 51
2.14 Velocidade do motor e referˆencia . . . 52
2.15 Velocidade do motor e referˆencia (amplia¸c˜ao) . . . 53
2.16 Corrente de eixo direto . . . 53
2.17 Corrente de eixo direto (amplia¸c˜ao) . . . 54
2.18 Corrente de eixo em quadratura . . . 55
2.19 Tens˜ao estat´orica trif´asica . . . 55
2.23 Corrente de eixo em quadratura . . . 58
2.24 Tens˜ao estat´orica trif´asica . . . 58
2.25 Corrente estat´orica trif´asica . . . 59
2.26 Velocidade do motor e referˆencia . . . 60
2.27 Velocidade do motor e referˆencia (amplia¸c˜ao) . . . 61
2.28 Corrente de eixo direto (amplia¸c˜ao) . . . 61
2.29 Corrente de eixo em quadratura . . . 62
2.30 Tens˜ao estat´orica trif´asica . . . 63
2.31 Corrente estat´orica trif´asica . . . 63
3.1 Velocidade do motor e referˆencia . . . 72
3.2 Velocidade do motor e referˆencia (amplia¸c˜ao) . . . 73
3.3 Corrente de eixo direto . . . 74
3.4 Corrente de eixo direto (amplia¸c˜ao) . . . 74
3.5 Tens˜ao trif´asica de estator (amplia¸c˜ao) . . . 75
3.6 Corrente trif´asica de estator (amplia¸c˜ao) . . . 75
3.7 Corrente de eixo em quadratura . . . 76
A aplica¸c˜ao das m´aquinas el´etricas girantes trouxe um grande avan¸co para os meios pro-dutivos. Por serem altamente eficientes na convers˜ao eletromecˆanica de energia, sua utiliza¸c˜ao em larga escala foi fundamental para o desenvolvimento da industrializa¸c˜ao no mundo con-temporˆaneo.
Durante muitos anos a maioria das aplica¸c˜oes dos motores el´etricos era elementar dentro do processo produtivo, ou seja, n˜ao havia qualquer exigˆencia de controle, seja em posi¸c˜ao, velocidade ou torque. Sendo assim, era apenas requerido o funcionamento da m´aquina a uma dada velocidade praticamente constante e, portanto, sem exigˆencias de quaisquer a¸c˜oes de controle no acionamento. Contudo, com o desenvolvimento tecnol´ogico e o advento da automa¸c˜ao industrial, muitas aplica¸c˜oes tˆem requerido acionamentos controlados, com maior precis˜ao na resposta e com altos desempenhos dinˆamicos, na busca de uma maior eficiˆencia e economia.
At´e o in´ıcio dos anos oitenta, os motores de corrente cont´ınua (C.C.) foram largamente empregados nas aplica¸c˜oes que exigiam rapidez e precis˜ao no controle de posi¸c˜ao e velocidade. Isto devido `a simplicidade do controle do movimento desta m´aquina em fun¸c˜ao do desacopla-mento natural entre a corrente de campo, respons´avel pelo fluxo, e a corrente de armadura, que estabelece o torque da m´aquina. Este desacoplamento se d´a em virtude da ortogonalidade entre os campos magn´eticos de estator e rotor, o que ´e uma caracter´ıstica intr´ınseca da forma construtiva da m´aquina C.C. . Por´em, o motor C.C. apresenta certas limita¸c˜oes, tais como a pequena capacidade de sobrecarga, a estreita faixa de opera¸c˜ao da velocidade e o alto custo de fabrica¸c˜ao e manuten¸c˜ao, devido `a existˆencia de escovas e do comutador, o que restringe a utiliza¸c˜ao em ´areas inflam´aveis, onde o faiscamento do comutador ´e invi´avel.
de alternativas `a utiliza¸c˜ao do motor C.C.. Recentemente, com o advento dos microproces-sadores, com o desenvolvimento de materiais magn´eticos e com a tecnologia dos semicondu-tores reuniram-se condi¸c˜oes t´ecnicas para o uso de mosemicondu-tores de corrente alternada (C.A.) em sistemas que necessitam de alto desempenho do controle.
Dentre os tipos de motores C.A., os motores s´ıncronos, em especial os de ´ım˜as permanentes (servos C.A.), tˆem sido objeto de estudos e aplica¸c˜oes. Atualmente os servomotores C.A. tˆem encontrado emprego crescente em aplica¸c˜oes sofisticadas do ponto de vista do controle do movimento, onde o desempenho dinˆamico, as altas taxas de acelera¸c˜ao, a reduzida rela¸c˜ao massa/potˆencia e a alta eficiˆencia s˜ao requisitos importantes. Os servos C.A., muito embora sejam mais dif´ıceis de controlar, pois, seus modelos matem´aticos s˜ao n˜ao lineares, fortemente acoplados e multi-vari´aveis, apresentam vantagens significantes relativamente aos motores C.C.[20], [13], tais como: (i) a raz˜ao entre potˆencia/massa (kW/kg) ´e cerca de 30% superior; (ii) a ausˆencia de escovas e de comutador no rotor reduz os custos de manuten¸c˜ao e n˜ao sofre restri¸c˜ao a aplica¸c˜oes em ´areas restritas (inflam´aveis), pois n˜ao h´a faiscamentos; (iii) a obten¸c˜ao de maiores faixas de opera¸c˜ao em velocidade; (iv) o baix´ıssimo momento de in´ercia do rotor em fun¸c˜ao da ausˆencia de enrolamentos e de comutador; (v) as possibilidades de constru¸c˜ao de motores com carca¸cas hermeticamente vedadas, o que torna este tipo de motor pr´oprio para aplica¸c˜oes aeroespaciais e rob´otica; (vi) a ausˆencia de perdas rot´oricas, aumentando a eficiˆencia.
A forma construtiva, a grande robustez eletromecˆanica, o baixo custo de fabrica¸c˜ao e de manuten¸c˜ao s˜ao fatores que os tornam atrativos para o setor industrial.
Nas ´ultimas duas d´ecadas, a t´ecnica de controle baseada em sistemas de estruturas vari´aveis (SEV) ou controlador de estrutura vari´avel (CEV) em modos deslizantes, tem rece-bido especial aten¸c˜ao dos pesquisadores. Matematicamente, a base desta t´ecnica remonta ao final da d´ecada de cinq¨uenta [10]. Por´em, somente na d´ecada de setenta ´e que esta t´ecnica come¸ca a ter maior divulga¸c˜ao no ocidente, atrav´es dos trabalhos de Utkin [38] e Itkis [19].
O controlador de estrutura vari´avel baseia-se [38] na imposi¸c˜ao de restri¸c˜oes ao sistema, delimitando uma regi˜ao no espa¸co de estados, designada de superf´ıcie. Atrav´es da aplica¸c˜ao de uma lei de controle descont´ınua (estrutura vari´avel), a trajet´oria do sistema ´e levada para sobre a superf´ıcie projetada. Uma vez mantendo-se sobre a superf´ıcie, temos a garantia de que o sistema est´a cumprindo o desempenho desejado.
Tecnicamente, o controle por modos deslizantes se mostra bastante interessante, com algumas caracter´ısticas importantes tais como robustez `as perturba¸c˜oes internas e externas, desacoplamento, facilidade de implementa¸c˜ao e redu¸c˜ao de ordem [40], [39], [34], [12] e [17].
Por´em, para manter o sistema sobre a superf´ıcie projetada, o controlador necessita de um chaveamento excessivo da estrutura, sendo este chaveamento conhecido como fenˆomeno do ”chattering”. Na pr´atica esse fenˆomeno ´e indesej´avel, pois pode excitar dinˆamicas n˜ao mode-ladas, as quais podem levar o sistema `a instabilidade. Tamb´em pode acarretar o chaveamento excessivo dos atuadores f´ısicos, levando-os `a fadiga.
Na d´ecada de oitenta e in´ıcio dos anos noventa, as pesquisas se concentraram em buscar alternativas para a lei de controle, visando minimizar o efeito do “chattering”[34], [17], [21], [29] e [12]. Por´em, as alternativas desenvolvidas, embora minimizem o “chattering”, intro-duzem uma perda de precis˜ao no sistema, o que requer nos projetos a adequada observa¸c˜ao da rela¸c˜ao “chattering”/precis˜ao.
Mais recentemente, ao final da d´ecada de noventa, uma nova abordagem do controle por modos deslizantes com redu¸c˜ao de “chattering”e sem perda de precis˜ao tem sido desenvolvida. A t´ecnica ´e denominada de controle por modos deslizantes de ordem superior [11], [5], [25], [24].
Outras abordagens com diferentes t´ecnicas para o controle de motores s´ıncronos podem ser encontradas, como ´e o caso da t´ecnica de controle vetorial [37], do controle adaptativo [2] e de lineariza¸c˜ao por realimenta¸c˜ao de estados (“feedback linearization”) [27] . Tamb´em os conceitos de redes neurais [30] e l´ogica Fuzzy [26] tˆem sido empregados para o estudo do controle dos motores s´ıncronos.
Este trabalho trata do controle por modos deslizantes aplicado ao motor s´ıncrono de ´ım˜a permanente. Apresenta um estudo completo do controle em modos deslizantes de primeira ordem focando a robustez `as perturba¸c˜oes internas e externas e a redu¸c˜ao do “chattering”. Com o mesmo objetivo ´e desenvolvido um estudo com um controlador em modos deslizantes de segunda ordem, a fim de comprovar e comparar com as t´ecnicas de redu¸c˜ao do “chattering”do controlador de primeira ordem.
O Cap´ıtulo 1 trata da modelagem do motor s´ıncrono convencional, com enrolamento no rotor e da modelagem do motor s´ıncrono de ´ım˜a permanente, visando os objetivos de controle. A aplica¸c˜ao de transforma¸c˜oes de coordenadas permite obter os modelos bif´asicos no sistema de coordenadas s´ıncrono dq.
O Cap´ıtulo 2 apresenta um estudo da aplica¸c˜ao do controle por modos deslizantes ao motor de ´ım˜a permanente. Inicialmente ´e empregado um controle padr˜ao de 1a. ordem com de-scontinuidade introduzida atrav´es da fun¸c˜ao sinal. S˜ao estudados alguns m´etodos de redu¸c˜ao do fenˆomeno do “chattering”, baseados no conceito de camada limite numa vizinhan¸ca da superf´ıcie de deslizamento. S˜ao apresentados resultados de simula¸c˜ao para o controle da velocidade, sob severas condi¸c˜oes de varia¸c˜oes da resistˆencia estat´orica e do torque de carga. O Cap´ıtulo 3 trata da abordagem do controle por modos deslizantes de ordem superior ao servomotor C.A. . O objetivo ´e estudar as possibilidades desta abordagem relativamente `a redu¸c˜ao do “chattering”sem perda na precis˜ao. O controlador implementado ´e de segunda ordem e os resultados de simula¸c˜ao apresentados s˜ao para o controle de velocidade, sendo aplicadas as mesmas condi¸c˜oes de desempenhos exigidas para o controlador de primeira or-dem.
Modelamento do Motor S´ıncrono
1.1
Introdu¸
c˜
ao
Este cap´ıtulo apresenta um estudo sobre a modelagem dinˆamica do motor s´ıncrono trif´asico e sim´etrico. A relevˆancia deste estudo est´a no estabelecimento das rela¸c˜oes en-tre os parˆametros trif´asicos e os parˆametros bif´asicos da m´aquina, utilizados nos algoritmos de controle .
Ser˜ao apresentados dois estudos de modelo para o motor s´ıncrono trif´asico de p´olos salientes: um para o motor convencional com enrolamento no rotor e outro, para o motor com rotor a ´ım˜a permanente.
Em fun¸c˜ao dos objetivos de controle que ser˜ao especificados nos cap´ıtulos posteriores, deste trabalho, o modelo do motor ser´a explicitado em termos das dinˆamicas das seguintes vari´aveis: posi¸c˜ao(θm) e velocidade(ω)do eixo do motor; corrente de eixo direto(isd) e corrente
de eixo em quadratura(isq) do estator.
1.2
Motor S´ıncrono de P´
olos Salientes Convencional
Nesta se¸c˜ao apresentamos o desenvolvimento do modelo bif´asico no referencial s´ıncrono (dq) a partir do modelo trif´asico do motor s´ıncrono de p´olos salientes convencional.
Figura 1.1: Modelo do motor s´ıncrono de p´olos salientes convencional
Inicialmente vamos considerar a representa¸c˜ao do motor s´ıncrono, conforme a Figura (1.1). Podemos observar que o motor ´e composto de um estator sobre o qual est˜ao distribu´ıdas uni-formemente as bobinas de cada uma das trˆes fases e, de um rotor de p´olos salientes com um enrolamento concentrado, no caso da m´aquina convencional, e com ´ım˜as permanentes, no caso do servomotor C.A.. As seguintes hip´oteses s˜ao assumidas:
- os enrolamentos estat´oricos s˜ao idˆenticos e igualmente defasados entre si de 120◦;
- o material ferro-magn´etico n˜ao sofre satura¸c˜ao;
- a densidade de fluxo magn´etico no entreferro s´o apresenta componente radial e sua dis-tribui¸c˜ao ´e co-senoidal;
- n˜ao s˜ao consideradas perdas magn´eticas.
A partir das leis f´ısicas, podemos obter a equa¸c˜ao circuital matricial para os enrolamentos do estator: Vsa Vsb Vsc =
Rs 0 0
0 Rs 0
0 0 Rs
ondeVsa, Vsb, Vsc representam as tens˜oes aplicadas aos enrolamentos do estator, eIsa, Isb, Isc
s˜ao as correntes que circulam pelas respectivas bobinas do estator e ˙φa,φ˙b,φ˙c representam
as derivadas temporais dos fluxos magn´eticos concatenados com as respectivas bobinas do estator. De uma forma mais compacta, podemos representar a equa¸c˜ao (1.1) por:
[Vs3] = [Rs3] [Is3] +
˙ φs3
(1.2)
sendo
[Vs3] =
Vsa Vsb Vsc
[Rs3] =
Rs 0 0
0 Rs 0
0 0 Rs
[Is3] =
Isa Isb Isc ˙ φs3
= ˙ φa ˙ φb ˙ φc
Considerando que Mab, Mac e Mbc s˜ao os valores das indutˆancias m´utuas entre as
re-spectivas fases do estator, podemos escrever a equa¸c˜ao matricial do fluxo do estator como sendo: φa φb φc =
La Mab Mac
Mab Lb Mbc
Mac Mbc Lc
Isa Isb Isc + Mar Mbr Mcr
Ir (1.3)
onde La, Lb e Lc s˜ao as indutˆancias pr´oprias por fase do estator, Mar, Mbr e Mcr s˜ao as
indutˆancias m´utuas entre as fases do estator e o enrolamento do rotor eIr ´e a corrente do
enrolamento do rotor.
Em uma forma mais compacta temos:
[φs3] = [Ls3] [Is3] + [Msr]Ir (1.4)
onde
[φs3] =
φa φb φc
[Ls3] =
La Mab Mac
Mab Lb Mbc
Mac Mbc Lc
[Is3] =
Isa Isb Isc
[Msr] =
Em fun¸c˜ao da forma construtiva do rotor com p´olos salientes, as indutˆancias pr´oprias e m´utuas podem ser modeladas em fun¸c˜ao do ˆangulo de deslocamento do rotor (θ) e da distribui¸c˜ao senoidal do fluxo no entreferro [23] como sendo:
La = Ls−Lmcos2(θ+π2)
Lb = Ls−Lmcos2(θ−π6)
Lc = Ls−Lmcos2(θ+π6)
Mab = −12Ls−Lmcos2(θ+π6)
Mac = −12Ls−Lmcos2(θ−π6)
Mbc = −12Ls−Lmcos2(θ−π2)
Mar = Lsrcos(θ)
Mbr = Lsrcos(θ−23π)
Mbr = Lsrcos(θ+23π)
(1.5)
onde Ls ´e o valor m´edio de indutˆancia pr´opria da bobina, Lm ´e a m´axima varia¸c˜ao da
indutˆancia e Lsr ´e a m´axima varia¸c˜ao das indutˆancias m´utuas entre as fases do estator e o
enrolamento do rotor. A Figura (1.2) esbo¸ca o comportamento das indutˆancias pr´oprias tal como descrito.
A equa¸c˜ao el´etrica para o rotor ´e dada por:
Vr=RrIr+
˙ φr
(1.6)
onde o fluxo no rotor ´e dado por:
φr=LrIr+MarIsa+MbrIsb+McrIsc
sendo Lr a indutˆancia pr´opria do enrolamento do rotor e φr o fluxo concatenado com o
enrolamento do rotor.
Uma vez que temos definidas as equa¸c˜oes eletromagn´eticas que representam o compor-tamento do motor s´ıncrono de p´olos salientes convencional, podemos fazer a aplica¸c˜ao da transforma¸c˜ao trif´asica-bif´asica (K) [4] `as equa¸c˜oes estat´oricas. Com isto, temos o estator trif´asico transformado num equivalente bif´asico, no referencial estacion´ario αβ0. A trans-forma¸c˜ao utilizada ´e definida pela seguinte matriz K:
K = 2 3
1 −12 −12
0 √23 − √ 3 2 1 √ 2 1 √ 2 1 √ 2 (1.7)
que ´e invariante em potˆencia. Deste fato resulta que [K]−1 = [K]T.
Aplicando a transforma¸c˜ao K na equa¸c˜ao(1.2) temos:
K[Vs3] =K[Rs3] [Is3] +K
˙ φs3
(1.8)
A rela¸c˜ao de transforma¸c˜ao K nos permite escrever a seguinte rela¸c˜ao:
[Is3] =K−1[Is20] (1.9)
sendo Is20= [Iα, Iβ, I0]T, comI0 sendo a componente de seq¨uˆencia zero.
Is2, como Is2 = [Iα, Iβ]T.
Aplicando a equa¸c˜ao (1.9) em (1.8), temos:
K[Vs3] =K[Rs3]K−1[Is2] +K
˙ φs3
Contudo, como [Rs3] ´e proporcional `a matriz identidade, temos queK[Rs3]K−1 = [Rs3].
Com isso podemos escrever:
[Vs2] = [Rs2] [Is2] +
˙ φs2
(1.10)
sendo Vs2 = [Vα, Vβ]T,φs2 = [φα, φβ]T e
Rs2 =
Rs 0
0 Rs
Observamos que Vs2 e φs2 j´a est˜ao definidos desprezando as respectivas componentes de
seq¨uˆencia zero. Podemos verificar que a matrizRs2 est´a definida como a sub-matriz (2x2) da
matriz Rs3, onde desprezamos a terceira linha e terceira coluna.
Do mesmo modo, se aplicarmos a transforma¸c˜ao K na equa¸c˜ao(1.4) teremos:
K[φs3] =K[Ls3] [Is3] +K[Msr]Ir
Utilizando a rela¸c˜ao dada por (1.9) podemos escrever:
K[φs3] =K[Ls3]K−1[Is2] +K[Msr]Ir
Finalmente obtemos a seguinte equa¸c˜ao para o fluxo do estator no referencial bif´asico:
[φs2] = [Ls2] [Is2] +
3
2φr2[Mθ] (1.11)
sendo φr2 =LsrIr,Mθ= [cos(θ), sen(θ)]T e:
Ls2=
1.5Ls−1.5Lm+ 3Lmcos2(θ) 3Lmsen(θ)cos(θ)
3Lmsen(θ)cos(θ) 1.5Ls+ 1.5Lm−3Lmcos2(θ)
Se substituirmos a equa¸c˜ao(1.11) em (1.10), obtemos:
[Vs2] = [Rs2] [Is2] +Ls2
˙ Is2
+Ls2lθ[I˙ s2] + [Mθl] ˙θKm (1.13)
ondeKm =
3
2φr2,Mθl = [−sen(θ), cos(θ)]T e
Ls2l=
−6Lmsen(θ)cos(θ) 3Lm(cos2(θ)−sen2(θ))
3Lm(cos2(θ)−sen2(θ)) 6Lmsen(θ)cos(θ)
(1.14)
Da equa¸c˜ao(1.13) podemos escrever a equa¸c˜ao da dinˆamica das correntes como:
˙ Is2
=−[Ls2]−1[Rs2] [Is2]−[Ls2]−1Ls2lθ[I˙ s2]−[Ls2]−1[Mθl] ˙θKm+ [Ls2]−1[Vs2] (1.15)
At´e este ponto, o que temos ´e o modelo de uma m´aquina equivalente bif´asica, onde as grandezas trif´asicas f´ısicas do estator foram transformadas segundo um referencial bif´asico ortogonal estacion´ario e as grandezas do rotor est˜ao segundo o seu referencial girante. O passo seguinte ´e a transforma¸c˜ao de todas as grandezas da m´aquina para um ´unico sistema de coordenadas fixado no rotor, conhecido na literatura como sistema de coordenadas s´ıncrono dq. Para tanto lan¸caremos m˜ao da transforma¸c˜ao de rota¸c˜ao (T) [28] e que, matematicamente,
est´a definida como:
T =
cos(θ) sen(θ)
−sen(θ) cos(θ)
(1.16)
a qual transforma as grandezas do referencialαβem grandezas no referencialdq. Em s´ıntese, o referencial dq ´e um sistema de eixos ortogonais onde o eixo direto deste ´e alinhado com o eixo direto do rotor e, portanto, gira com velocidade igual `a do rotor. A Figura 1.3 mostra a rela¸c˜ao entre os sistemas de eixos estacion´ario αβ e s´ıncronodq.
Aplicando a transforma¸c˜ao de rota¸c˜ao na equa¸c˜ao (1.13) temos:
T[Vs2] =T[Rs2] [Is2] +T Ls2
˙ Is2
+T Ls2lθ[I˙ s2] +T[Mθl] ˙θKm (1.17)
β
elétrica do rotor Velocidade
==>
.
θ = ω
θ
q d
α
Figura 1.3: Sistemas de coordenadas
estacion´arioαβ e no referencialdq:
[Is2] =T−1[Isdq] (1.18)
sendo Isdq = [isd, isq]T.
Derivando os dois lados da igualdade da equa¸c˜ao (1.18) obtemos:
˙
Is2 = ˙T−1θI˙ sdq+T−1[ ˙Isdq] (1.19)
Aplicando (1.18) e (1.19) na equa¸c˜ao (1.17) temos:
T[Vs2] =T[Rs2]T−1[Isdq] +T Ls2T−1θ˙[Isdq] +T Ls2T−1[ ˙Isdq] +T Ls2lT−1θ˙[Isdq] +T[Mθl] ˙θKm
(1.20)
Como um dos objetivos deste estudo ´e obter as rela¸c˜oes entre os parˆametros do modelo bif´asico e os parˆametros f´ısicos da m´aquina, desenvolvendo o coeficiente do segundo termo da equa¸c˜ao (1.20), podemos escrever:
[Lsdq] =T[Ls2]T−1=
1.5(Ls+Lm) 0
0 1.5(Ls−Lm)
(1.21)
a indutˆancia de eixo direto (Ld) e a indutˆancia de eixo em quadratura (Lq), segundo os
parˆametros f´ısicos do motor (Ls eLm), atrav´es das seguintes rela¸c˜oes:
Ld = 1.5(Ls+Lm)
Lq = 1.5(Ls−Lm)
(1.22)
ent˜ao podemos reescrever a equa¸c˜ao (1.21) como:
Lsdq=
Ld 0
0 Lq
Resolvendo os demais coeficientes da equa¸c˜ao (1.20), obtemos a seguinte express˜ao de tens˜oes para o referencial dq:
Vsdq = [Rs2][Isdq] + [Lsdq] ˙θ[Isdq] + [Lsdq][ ˙Isdq] + [Lsldq] ˙θ[Isdq] + [Mθdq] ˙θKm (1.23)
ondeVsdq= [vsd, vsq]T e
Lsldq=
0 3Lm
3Lm 0
Mθdq =
0 1 (1.24)
A partir da equa¸c˜ao (1.23) obtemos a equa¸c˜ao da dinˆamica das correntes de estator no referencial dq como sendo:
[ ˙Isdq] = [LRdq][Isdq] + [LLdq][Isdq] ˙θ+ [LMdq]Kmθ˙+ ˙θ[Isqd] + [Lsdq]−1[Vsdq] (1.25)
onde
LRdq =
−RLds 0 0 −RLsq
LLdq =
0 −3LLdm
−3LLqm 0
LMdq=
0
−L1q
(1.26)
Temos ent˜ao determinadas todas as equa¸c˜oes de tens˜oes e correntes para o estator segundo o referencial s´ıncrono dq.
Para o rotor podemos escrever a equa¸c˜ao do fluxo como sendo:
φr=LrIr+ [Msr]T[Is3] (1.27)
Verificamos que a equa¸c˜ao (1.27) ´e fun¸c˜ao das correntes e das indutˆancias m´utuas referidas ao referencial trif´asico. Aplicando a transforma¸c˜ao K `as correntes trif´asicas podemos escrever:
φr=LrIr+ [Msr]TK−1[Is2]
para a qual, resolvendo o coeficiente do segundo termo, obtemos a equa¸c˜ao do fluxo rot´orico segundo o referencial estacion´arioαβ:
φr=LrIr+ [Msr2][Is2] (1.28)
sendo
[Msr2] = [Msr]TK−1 =
3
2[Lsrcosθ Lsrsenθ]
Da mesma forma, se aplicarmos a transforma¸c˜ao de rota¸c˜ao `a matriz [Is2] na equa¸c˜ao
(1.28), podemos escrever:
φr=LrIr+ [Msr2]T−1[Isdq]
da qual, ap´os resolvermos o coeficiente do segundo termo, podemos escrever a equa¸c˜ao do fluxo rot´orico segundo o referencialdq:
φr =LrIr+ [Msrdq][Isdq] (1.29)
com [Msrdq] =
3
2[Lsr 0].
direto com o eixo direto do rotor, eliminando a componente em quadratura do fluxo. Ent˜ao a equa¸c˜ao (1.6) que descreve a tens˜ao do rotor pode ser reescrita, no referencial s´ıncrono, como:
vr =Rrir+Lri˙r+Msrd˙isd (1.30)
sendo Msrd =
3 2Lsr.
Finalmente temos determinadas todas as equa¸c˜oes el´etricas do estator e do rotor nos trˆes referenciais, ou seja, referencial trif´asico, referencial estacion´ario e referencial s´ıncrono.
Com rela¸c˜ao `a equa¸c˜ao mecˆanica, vamos iniciar analisando a equa¸c˜ao da potˆencia el´etrica (P) absorvida pelo motor:
P = vsdisd+vsqisq+vrir
= Ldisdi˙sd+Lqisqi˙sq+Lrir˙ir+Msrdir˙isd
+Rs(i2sd+i2sq) +Rrir2+ [(Ld−Lq)isd+Km]isqθ˙
(1.31)
Na equa¸c˜ao (1.31) podemos observar que a potˆencia el´etrica ´e composta por trˆes termos distintos: o primeiro pela potˆencia(Pmag) referente `a energia armazenada no campo magn´etico
dos enrolamentos de eixo direto e de eixo em quadratura do estator e do enrolamento do rotor; um segundo termo referente `as perdas (PJ) por efeito Joule nas resistˆencias estat´oricas
e rot´oricas; e um termo relativo `a potˆencia mecˆanica (Pm), desenvolvida no eixo do motor.
De uma forma quantitativa, cada termo ´e dado por:
Pmag = Ldisdi˙sd+Lqisqi˙sq+Lrir˙ir+Msrdir˙isd
PJ = Rs(i2sd+i2sq) +Rri2r
Pm = [(Ld−Lq)isd+Km]isqθ˙
(1.32)
Devemos observar que a velocidade angular mecˆanica ωm se relaciona com a velocidade
angular el´etricaω, pela seguinte equa¸c˜ao:
ω = θ˙ = pωm (1.33)
ondep´e o n´umero de pares de p´olos do rotor.
mecˆanica (Pmec) como sendo:
Pm = p[(Ld−Lq)isd+Km]isqωm (1.34)
Da rela¸c˜ao mecˆanica torque-potˆencia [36] temos:
Tm = Pωmm
= p[(Ld−Lq)isd+Km]isq
(1.35)
A equa¸c˜ao dinˆamica do torque para o motor ´e dada por:
Tm−Tb−Tl = Jω˙m (1.36)
onde Tl ´e o torque de carga, J ´e o momento de in´ercia do motor e Tb ´e o torque de perdas
por atritos, modelado como proporcional `a velocidade:
Tb = bωm (1.37)
Se substituirmos as equa¸c˜oes (1.35) e (1.37) em (1.36), podemos escrever a seguinte equa¸c˜ao para a dinˆamica da velocidade mecˆanica:
˙
ωm = pJ[(Ld−Lq)isd + Km]isq − fJvωm − TJl (1.38)
e sendo a rela¸c˜ao entre posi¸c˜ao e velocidade do eixo do motor dado por:
˙
θm =ωm (1.39)
pelo seguinte conjunto de equa¸c˜oes diferenciais:
˙
θm = ωm
˙
ωm = Jp[(Ld−Lq)isd+Km]isq− fv
Jωm−TJl
˙
isd = −RLdsisd+pLLdqωmisq+L1dvsd
˙
isq = −RLqsisq−pLLqdωmisq−pKLqmωm+ L1qvsq
vr = Rrir+Lr˙ir+Msrdi˙sd
(1.40)
Na pr´oxima se¸c˜ao determinaremos o conjunto de equa¸c˜oes para o modelo do motor com rotor a ´ım˜a permanente.
1.3
Motor com Rotor a ´
Im˜
a Permanente
Nesta se¸c˜ao ser´a apresentado o desenvolvimento para a obten¸c˜ao do modelo no referencial s´ıncronodqpara o motor com rotor a ´ım˜a permanente. Basicamente a mudan¸ca construtiva se d´a somente no rotor, onde o enrolamento bobinado sobre o maci¸co ferro-magn´etico com p´olos salientes ´e substitu´ıdo por um maci¸co ferro-magn´etico recoberto por um material magn´etico (´ım˜a), o qual conforma os p´olos salientes de modo a fornecer um fluxo magn´etico co-senoidal no entreferro.
Contudo, uma vez que a dedu¸c˜ao completa foi desenvolvida para o motor convencional, aqui apresentaremos apenas as diferen¸cas que decorrem da modifica¸c˜ao na forma constru-tiva do rotor.
Inicialmente, a primeira equa¸c˜ao a ser afetada pela ausˆencia de enrolamento do rotor e pela presen¸ca do ´ım˜a permanente ´e a equa¸c˜ao (1.3), a qual passamos a escrever como:
φa φb φc =
La Mab Mac
Mab Lb Mbc
Mac Mbc Lc
onde φar, φbr e φcr s˜ao o fluxo concatenado do rotor com as respectivas fases do estator e,
devido `a forma construtiva do rotor, temos:
φar = φsrmcos(θ)
φbr = φsrmcos(θ− 23π)
φbr = φsrmcos(θ+ 23π)
(1.42)
sendo φsrm o m´aximo fluxo concatenado do rotor com as fases do estator.
Ent˜ao a equa¸c˜ao (1.4), na forma mais compacta, fica:
[φs3] = [Ls3] [Is3] + [φsr] (1.43)
sendo [φsr] = [φar φbr φcr]T.
Outra diferen¸ca entre os motores se d´a na equa¸c˜ao(1.5), onde, em fun¸c˜ao da diferen¸ca de permeabilidade entre o n´ucleo do rotor bobinado e o n´ucleo do rotor a ´ım˜a permanente, as indutˆancias pr´oprias e m´utuas sofrem uma modifica¸c˜ao no seu modelamento. Com isso o conjunto de equa¸c˜oes dado por (1.5) passa a ser:
La = Ls+Lmcos2(θ+π2)
Lb = Ls+Lmcos2(θ−π6)
Lc = Ls+Lmcos2(θ+π6)
Mab = −12Ls+Lmcos2(θ+ π6)
Mac = −12Ls+Lmcos2(θ− π6)
Mbc = −12Ls+Lmcos2(θ− π2)
(1.44)
Em fun¸c˜ao das altera¸c˜oes no fluxo concatenado do rotor com o estator e das altera¸c˜oes nas indutˆancias pr´oprias e m´utuas, redefinimos a constante φr2, que aparece na equa¸c˜ao (1.11),
como sendoφr2 =φsrm, e a matrizLs2, dada pela equa¸c˜ao(1.12) passamos a escrever como:
Ls2=
1.5Ls+ 1.5Lm−3Lmcos2(θ) −3Lmsen(θ)cos(θ)
−3Lmsen(θ)cos(θ) 1.5Ls−1.5Lm+ 3Lmcos2(θ)
reescrevemos a equa¸c˜ao (1.14) como:
Ls2l=
6Lmsen(θ)cos(θ) 3Lm(sen2(θ)−cos2(θ))
3Lm(sen2(θ)−cos2(θ)) −6Lmsen(θ)cos(θ)
(1.46)
Tamb´em a equa¸c˜ao (1.21) sofre altera¸c˜oes passando a ser escrita como:
[Lsdq] =T[Ls2]T−1=
1.5(Ls−Lm) 0
0 1.5(Ls+Lm)
(1.47)
Com isso pode ser determinada a diferen¸ca fundamental entre os dois tipos de motores s´ıncronos, que ´e a forma diferente para o c´alculo da indutˆancia de eixo direto e da indutˆancia de eixo em quadratura para cada um dos motores. Reescrevemos a equa¸c˜ao (1.22) como sendo:
Ld = 1.5(Ls−Lm)
Lq = 1.5(Ls+Lm)
(1.48)
Ainda podemos verificar que a matriz LLdq, dada pela equa¸c˜ao (1.49), passa a ser:
LLdq =
0 3Lm
Ld
3Lm
Lq 0
(1.49)
com o que determinamos as equa¸c˜oes el´etricas para o motor com rotor a ´ım˜a permanente. A presen¸ca do ´ım˜a permanente no rotor deixa sem par todas as equa¸c˜oes escritas para a tens˜ao e o fluxo rot´orico do motor com rotor bobinado. Com isso reescrevemos a equa¸c˜ao (1.31), que rege a potˆencia el´etrica absorvida pelo motor, como sendo:
P = vsdisd+vsqisq
= Ldisdi˙sd+Lqisqi˙sq+Rs(i2sd+i2sq) + [(Ld−Lq)isd+Km]isqθ˙
(1.50)
ent˜ao a equa¸c˜ao (1.32) fica:
Pmag = Ldisdi˙sd+Lqisqi˙sq
PJ = Rs(i2sd+i2sq)
Pm = [(Ld−Lq)isd+Km]isqθ˙
Para as equa¸c˜oes mecˆanicas n˜ao h´a nenhuma altera¸c˜ao na equa¸c˜oes (1.38) e (1.39), ficando o modelo completo do motor a ´ım˜a permanente definido como:
˙
θm = ωm
˙
ωm = Jp[(Ld−Lq)isd+Km]isq− fv
Jωm−TJl
˙
isd = −RLdsisd+
pLq
Ldωmisq+
1
Ldvsd
˙
isq = −RLqsisq−pLLqdωmisq−pKLqmωm+ L1qvsq
(1.52)
sendo que os valores das indutˆancias de eixo direto e de eixo em quadratura s˜ao calculadas de formas diferentes para os dois tipos de motor s´ıncrono analisados.
1.4
Conclus˜
ao
Neste Cap´ıtulo desenvolvemos as equa¸c˜oes el´etricas no referencial s´ıncronodqe as equa¸c˜oes mecˆanicas tanto para o motor s´ıncrono convencional, quanto para o motor com rotor a ´ım˜a permanente. Com isso atingimos os objetivos propostos, que eram os de escrever formal-mente os passos empregados no modelamento, visando obter um perfeito entendimento das transforma¸c˜oes empregadas e, ainda, explicitar de forma clara as rela¸c˜oes entre os parˆametros el´etricos (resistˆencia e indutˆancias ) no referencialdq com os parˆametros f´ısicos da m´aquina. Podemos concluir afirmando que as equa¸c˜oes que modelam os dois tipos de motores s˜ao as mesmas, por´em, as indutˆancias de eixo direto e de eixo em quadratura tˆem valores diferentes para cada caso, uma vez que as relutˆancias de eixo direto e de eixo em quadratura se alteram conforme o tipo de rotor utilizado. Enquanto o motor convencional tem a indutˆancia de eixo direto maior que a do eixo em quadratura, o motor com ´ım˜a permanente apresenta situa¸c˜ao contr´aria, ou seja, a indutˆancia de eixo em quadratura ´e maior que a de eixo direto.
rotor.
Modos Deslizantes de 1a. Ordem
2.1
Introdu¸
c˜
ao
Este cap´ıtulo apresenta uma abordagem de controle baseada nos modos deslizantes de 1a. ordem e sua aplica¸c˜ao ao motor s´ıncrono de ´ım˜a permanente e p´olos salientes (servo motor C.A.). A t´ecnica considerada ´e bem estabelecida na literatura e tem sido aplicada ao controle do movimento dos motores C.A. [13] e [1].
Primeiramente apresentamos os conceitos b´asicos da abordagem para o controle de uma classe de sistemas n˜ao lineares multi-vari´aveis. Na segunda parte tratamos da aplica¸c˜ao ao controle da velocidade do motor s´ıncrono. Por fim, com um estudo de simula¸c˜ao, comprova-mos a efic´acia da t´ecnica ao problema considerado e s˜ao realizadas compara¸c˜oes entre alguns m´etodos de redu¸c˜ao do “chattering”.
2.2
O Controle por Modos Deslizantes Convencional
2.2.1 Formula¸c˜ao do Problema de Controle
Seja a seguinte classe de sistemas n˜ao lineares representada por:
˙
x=f(x, t) +g(x, t)u(t) +ξ(t) y=h(x, t)
(2.1)
onde x(t) ∈ ℜn ´e o vetor de estados, y(t) ∈ ℜm ´e o vetor de sa´ıda, u(t) ∈ ℜm ´e o
ve-tor de entrada e f(x, t), g(x, t) e h(x, t) s˜ao fun¸c˜oes conhecidas, limitadas e continuamente diferenci´aveis em rela¸c˜ao a todos os argumentos. O vetor ξ(t) representa uma perturba¸c˜ao desconhecida, por´em limitada em norma.
A metodologia considerada baseia-se nos dois pontos seguintes: 1. obten¸c˜ao de uma superf´ıcie de deslizamentoS(x, ξ, t)∈ ℜm, que garanta a convergˆencia do erro de seguimento
de sa´ıday∈ ℜmpara zero, e 2. obten¸c˜ao de uma lei de controleu
n, que garanta a atratividade
da origem da superf´ıcie considerada em um tempo finito.
O projeto da superf´ıcie considera o problema do seguimento de sa´ıda. Sendo assim, cada componente da superf´ıcie S(x, ξ, t), para cada uma das sa´ıdas a ser controlada, ´e escrita na forma:
Sj = rj−1
i=0
lji(yjref −yj)
i (j = 1, ..., m) (2.2)
onderj ´e o grau relativo da sa´ıdayj(t) [18]. Podemos notar que o projeto da superf´ıcie, para
sa´ıdas com grau relativo superior a 1, constitui-se numa dinˆamica linear de erro de seguimento (yref −y)1. Assim, uma vez estando o sistema sobre a superf´ıcie de deslizamento, o erro de
seguimento converge exponencialmente para a origem, com a constante de tempo regulada pelo valor dos ganhoslji.
No caso de o grau relativo da sa´ıda ser igual a 1, a fun¸c˜ao (2.2) n˜ao apresenta dinˆamica, o que leva a convergˆencia do erro de seguimento para a origem ser n˜ao assint´otica.
Uma vez que a superf´ıcie S tenha sido definida, passamos ao projeto de uma lei de controle que garanta a atratividade da superf´ıcie considerada.
Supondo queS =w(x, ξ, t), podemos escrever ˙S(x, u, t) como:
˙
S = ∂w∂ξξ˙+∂w∂t +∂w∂xx˙
= ∂w
∂ξξ˙+
∂w
∂t +
∂w
∂x[f(x, t) +g(x, t)u(t) +ξ(t)]
= a(x, t) +η(ξ) +b(x, t)u(t)
(2.3)
1
Para a sa´ıdayj com grau relativo 2 (rj = 2), a equa¸c˜ao (2.2), no deslizamento (S = 0), ser´a ˙e=−kje,
onde
a(x, t) = ∂w∂t +∂w∂xf(x, t)
η(ξ) = ∂w∂ξξ˙+∂w∂xξ
b(x, t) = ∂w∂xg(x, t)
A simplifica¸c˜ao e o desacoplamento de (2.3) com rela¸c˜ao ao controle podem ser feitos com a seguinte lei de controle:
u=−[b(x, t)]−1
a(x, t) + [b(x, t)]−1
un (2.4)
onde consideramos que a matriz [b(x, t)] ´e n˜ao-singular para todo e qualquer tempo. A aplica¸c˜ao de (2.4) em (2.3) leva a:
˙
S(x, u, ξ, t) =un+η(ξ) (2.5)
A garantia da estabilidade do sistema (2.5) para a origem ´e obtida com um controle un projetado com base no crit´erio de estabilidade de Lyapunov. Seja a seguinte fun¸c˜ao de
Lyapunov:
V(S) = 1 2S
TS (2.6)
Essa fun¸c˜ao ´e sempre positiva para valores de S = 0 e nula em S = 0. Sua derivada temporal fica:
˙
V(S) = STS˙ = ST(u
n+η) (2.7)
A negatividade de ˙V(S) ´e garantida com o uso da seguinte lei de controle descont´ınua:
un=−Ksign(S) (2.8)
Assim podemos reescrever (2.7) como:
˙
Sendoη uma perturba¸c˜ao limitada em norma, por suposi¸c˜ao de projeto, ´e poss´ıvel obtermos um valor de K que satisfa¸ca a condi¸c˜ao K > |η|, tornando ˙V(S) negativa. Com isso temos garantida a estabilidade de ˙S para a origem deS. A lei de controle resultante ´e:
u= [b(x, t)]−1
(−a(x, t)−Ksign(S)) (2.10)
Com esse controle a trajet´oria do sistema converge para S(x, t) = 0 e, estando sobre esta, haver´a o deslizamento para a origem do erro de seguimento.
Visando otimizar os tempos computacionais da implementa¸c˜ao do controlador, apresen-tamos uma alternativa de implementa¸c˜ao para a lei de controle dada pela equa¸c˜ao (2.4). O objetivo ´e implementar a lei de controle desprezando o termo de simplifica¸c˜aoa(x, t), tal como proposto inicialmente. Portanto, prevendo apenas o desacoplamento, a nova lei de controle fica:
u= [b(x, t)]−1
un (2.11)
Se aplicarmos essa lei `as dinˆamicas de cada superf´ıcie, teremos:
˙
S(x, u, ξ, t) =un+a(x, t) +η(ξ) (2.12)
Novamente temos que garantir a estabilidade do sistema (2.12) para a origem. Para tanto, projetamos o controleun baseado no crit´erio de estabilidade de Lyapunov. A fun¸c˜ao
de Lyapunov adotada ´e:
V(S) = 1 2S
TS (2.13)
Essa fun¸c˜ao ´e sempre positiva para valores de S = 0 e nula em S = 0. Sua derivada temporal fica:
˙
V(S) = STS˙ = ST(u
n+a(x, t) +η) (2.14)
Para satisfazermos o crit´erio de estabilidade de Lyapunov precisamos garantir a negativi-dade de ˙V(S). Para tanto consideramos a seguinte lei de controle descont´ınua:
Assim podemos reescrever (2.14) como:
˙
V(S) = ST(−Ksign(S) +a(x, t) +η) (2.16)
sendo a(x, t) e η fun¸c˜oes limitadas em norma, por suposi¸c˜ao de projeto, ´e poss´ıvel obtermos um valor de K, que satisfa¸ca a condi¸c˜ao K > |a(x, t) +η|, o que, portanto, torna ˙V(S) negativa. Com isso temos garantida a estabilidade de ˙Spara a origem deS. A lei de controle resultante ´e:
u= 1
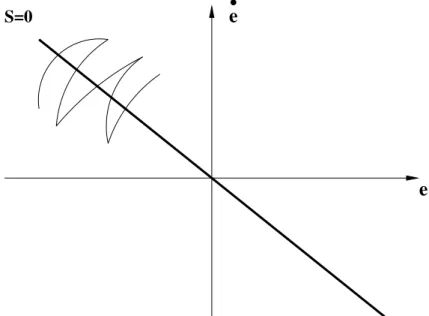
b(x, t)(−Ksign(S)) (2.17) Assim fica garantido que a dinˆamica do sistema tem convergˆencia para S(x, t) = 0 e que, estando sobre esta, haver´a o deslizamento com a dinˆamica de erro convergente para a origem. Contudo, devemos ressaltar que esse deslizamento sobre S = 0, somente ocorre para o caso ideal, pois, na pr´atica, os atrasos relacionados ao tempo de chaveamento e de processa-mento fazem com que o sistema n˜ao permane¸ca exatamente sobre a superf´ıcieS= 0, mas sim, numa vizinhan¸ca em torno desta. Esse fato pode levar o controle a sucessivos chaveamen-tos, mostrados na Figura 2.1(para grau relativo 2), conhecidos por “chattering”, que pode restringir a aplica¸c˜ao do controle de modos deslizantes a sistemas f´ısicos.
S=0
.
e
e
2.3
Redu¸
c˜
ao do Chattering
Como foi exposto na se¸c˜ao anterior, o “chattering”, ou seja, o excessivo chaveamento do controle ´e um fenˆomeno inerente ao controle descont´ınuo por modos deslizantes cl´assico e pode excitar dinˆamicas n˜ao modeladas, as quais podem levar o sistema `a instabilidade. Nesta se¸c˜ao iremos desenvolver um estudo sobre as t´ecnicas de redu¸c˜ao do “chattering”aplicadas ao controlador de 1a. ordem.
2.3.1 Altera¸c˜oes da Lei de Controle
Para o controle em modos deslizantes de 1a. ordem, a id´eia que tem sido utilizada para minimizar os efeitos negativos do “chattering”introduz a no¸c˜ao de camada limite [34] na vizinhan¸ca da superf´ıcie de deslizamento. O conceito de camada limite ´e ilustrado na Figura 2.2.
e
CAMADA LIMITE
ε
.
S=0
e
Figura 2.2: Camada Limite
ainda, s˜ao utilizadas as duas considera¸c˜oes, propiciando trechos com controle linear e trechos com banda morta, tal qual utilizada por Glumineau [13]. A utiliza¸c˜ao da camada limite implica uma perda da precis˜ao, uma vez que n˜ao se exigir´a que o sistema permane¸ca sobre a superf´ıcie e, sim, em sua vizinhan¸ca. Com isso o parˆametroǫser´a usado para a determina¸c˜ao de desempenho do sistema, uma vez que o seu ajuste implica em um compromisso entre a precis˜ao e a redu¸c˜ao do “chattering”.
No controle por modos deslizantes cl´assico, o controle descont´ınuo ´e implementado com o uso da fun¸c˜ao sinal (sign). A utiliza¸c˜ao da camada limite implica altera¸c˜ao da estrutura de controle e, portanto, h´a a necessidade de definirmos as novas fun¸c˜oes matem´aticas que nos permitir˜ao usar a no¸c˜ao de camada limite. Para o nosso estudo iremos definir duas novas fun¸c˜oes, conforme segue:
a) Camada limite com controle linear (sat1)
A fun¸c˜ao ´e definida matematicamente como:
sat1(S, x, t) =
−1 ,−ǫ < S(x, t);
S
ǫ ,−ǫ≤S(x, t)≥ǫ;
1 , S(x, t)> ǫ.
(2.18)
O gr´afico relativo `a fun¸c˜ao ´e mostrado na Figura 2.3.
b) Camada limite com zona morta (sat2)
A fun¸c˜ao que introduz uma zona morta no interior da camada limite ´e definida pela seguinte fun¸c˜ao matem´atica:
sat2(S, x, t) =
−1 ,−ǫ < S(x, t); 0 ,−ǫ < S(x, t)< ǫ; 1 , S(x, t)> ǫ.
(2.19)
+ε
−ε
f(S)
S
Figura 2.3: Fun¸c˜aosat1(S, x, t))
+ε
Sf(S)
+1
−1
−ε
2.4
Aplica¸
c˜
ao ao Motor S´ıncrono
Nesta se¸c˜ao aplicamos a t´ecnica apresentada na se¸c˜ao 2.2.1 ao controle do movimento do motor s´ıncrono de ´ım˜as permanentes e p´olos salientes. Para tanto, consideramos o modelo em coordenadas ortogonais no referencial s´ıncrono fixo no rotor [23]. Consideramos como perturba¸c˜ao a carga mecˆanica (Tl) e as varia¸c˜oes na resistˆencia estat´orica (∆Rs) devidas `a
varia¸c˜ao na temperatura interna do motor. Ambas as perturba¸c˜oes s˜ao consideradas limitadas
em norma. Ent˜ao, a equa¸c˜ao (2.1) pode ser escrita para o motor como:
x= [Θ, ωm, isd, isq]T , u= [vsd, vsq]T, h= [ωm, isd] (2.20)
f(x) =
ωm
(p/J) (Ldqisd+Km)isq−(fv/J)ωm
−(Rs/Ld)isd+ (pLq/Ld)isqωm
(Rs/Lq)isq−(pLd/Lq)isdωm−(pKm/Lqωm)
(2.21) g=
0 0 1/Ld 0
0 0 0 1/Lq
T
, ξ=
0 −Tl/J −∆RL s
d isd −
∆Rs
Lq isq
T
(2.22)
ondeLdeLqs˜ao, respectivamente, as auto-indutˆancias de eixo direto e de eixo em quadratura
do estator e Km ´e o fluxo do rotor, o qual consideramos constante. J ´e a in´ercia do sistema
(motor e carga),p´e o n´umero de pares de p´olos,fv´e o coeficiente de viscosidade. O parˆametro
Ldq ´e definido por:
Ldq = (Ld−Lq)
Conforme apresentado em (2.20), os estados do sistema s˜ao a posi¸c˜ao e a velocidade
mecˆanica e as componentes ortogonais da corrente de estator. As entradas s˜ao as tens˜oes de
estator e as sa´ıdas do sistema s˜ao a velocidade e a corrente de eixo direto.
Para a escolha das vari´aveis de sa´ıda levamos em considera¸c˜ao os seguintes aspectos: a
velocidade foi escolhida porque o objetivo b´asico de controle de um motor el´etrico ´e o seu
testarmos a t´ecnica considerada; a escolha da corrente de eixo direto tem o objetivo de anular
o torque de relutˆancia devido `a forma construtiva dos p´olos salientes.
Inicialmente determinamos o projeto das duas superf´ıcies a serem utilizadas para realizar
o controle da velocidade e da corrente. Para tanto, das equa¸c˜oes de estado do motor (equa¸c˜ao
(2.1), particularizada por (2.20), (2.21) e (2.22)), devemos observar que a velocidade tem grau
relativo 2, enquanto que a corrente tem grau relativo 1. Ent˜ao, utilizando a equa¸c˜ao (2.2)
aplicada a cada vari´avel de sa´ıda, obtemos:
S1 S2 =
( ˙y1ref −y˙1) +l1(y1ref −y1)
l2(y2ref −y2)
= ˙
ωmref −ω˙m+l1(ωmref −ωm)
l2(−isd)
(2.23)
Devemos atentar para o fato de que o controle da corrente de eixo direto tem o intuito de
anular o torque de relutˆancia e, por isso, a referˆencia ´e considerada zero (isdref = 0).
Para a obten¸c˜ao da lei de controle utilizamos a derivada da superf´ıcie. Portanto, derivando
(2.23) temos: ˙ S1 ˙ S2 =
(¨ωmref −ω¨m) +l1( ˙ωmref −ω˙m)
l2( ˙−isd)
(2.24)
Devemos identificar, para cada superf´ıcie, os termos que n˜ao dependem das entradas de
controle e os termos que est˜ao relacionados com elas, conforme a equa¸c˜ao (2.3). Assim
podemos escrever:
˙
S1(x, u, t) =a1(x, t) +η1(ξ) +b11(x, t)vsd(t) +b12(x, t)vsq (2.25)
e:
˙
S2(x, u, t) =a2(x, t) +η2(ξ) +b21(x, t)vsd(t) +b22(x, t)vsq (2.26)
Para determinarmos os termos a(x, t), b(x, t) e η(ξ), para cada uma das superf´ıcies,
uti-lizaremos as rela¸c˜oes matem´aticas definidas em (2.3). O termo a1(x, t) da superf´ıcie de
velocidade, ´e dado por:
onde
aω1 = ¨ωmref +l1ω˙mref
aω2 = (Jp(Ldqisd+Km))(
pLdωmisd
Lq +
Rsisq
Lq +
pKmωm
Ld )
aω3 = (Jp(Ldqisq))(pLqLωmdisq −RLsidsq)
aω4 = (Jb −l1)(
p(Ldqisd+Km)isq
J )
(2.28)
O termo de perturba¸c˜ao η1 fica:
η1 =
˙
Tl
J −( b J −l1)(
Tl
J) +
pisq∆R(LdqisdKm)
JLq
+ pLdqisdisq∆R
JLd
Os termos que dependem do controle, relacionados `a dinˆamica da superf´ıcie de velocidade,
b11(x, t) e b12(x, t), s˜ao:
b11(x, t) =−
pLdqisq
JLd
(2.29)
b12(x, t) =−
p(Ldqisd+Km)
JLq
(2.30)
Para a superf´ıcie de corrente, o termo independente das entradas a2(x, t) ´e dado por:
a2(x, t) =−l2(−Rsisd
Ld
+pLqωmisq
Ld
) (2.31)
O termo de perturba¸c˜ao η2(ξ) vale:
η2(ξ) = l2isd∆R
Ld
Com rela¸c˜ao aos termos dependentes das entradas de controle obtemos:
b21(x, t) =−
l2
Ld
(2.32)
b22(x, t) = 0 (2.33)
deslizantes para o motor como: v= vsd vsq =−
b11 b12
b21 b22
−1
a1+Kωsign(S1)
a2+Kisign(S2)
(2.34)
sendo que Kω>0 eKi>0 s˜ao os ganhos que determinam a velocidade de convergˆencia das
dinˆamicas em dire¸c˜ao `as superf´ıcies de deslizamento.
Finalmente, devemos garantir que a matriz b(x, t) da equa¸c˜ao (2.34) tenha sempre a sua
inversa, evitando que o sistema seja levado a alguma singularidade. A condi¸c˜ao a ser satisfeita
´e detb= 0. O determinante da matriz ´e dado por:
detb=
−pLdqisq
J Ld −
p(Ldqisd+Km)
J Lq
−l2
Ld 0
(2.35)
de onde conclu´ımos que, se:
isd =−
Km
Ldq
(2.36)
for satisfeita, a matriz b n˜ao apresentar´a singularidades. Portanto, o controle deve ser
proje-tado de forma a evitar que a corrente de eixo direto alcance o valor dado por (2.36).
Na pr´oxima se¸c˜ao estaremos validando a t´ecnica apresentada, atrav´es de simula¸c˜oes para
um dado desempenho desejado.
2.5
Estudo de Simula¸
c˜
ao
Esta se¸c˜ao mostra resultados de simula¸c˜ao obtidos com a aplica¸c˜ao da t´ecnica de controle
ao motor s´ıncrono de ´ım˜a permanente, apresentada na se¸c˜ao 2.2.
S˜ao objetivos do estudo: 1. analisar o desempenho do controlador apresentado, no que
se refere `a resposta dinˆamica e `a robustez relativamente a perturba¸c˜oes de carga e varia¸c˜oes
nas resistˆencias estat´oricas; 2. analisar os desempenhos dos controladores com (equa¸c˜ao 2.4)
e sem a realimenta¸c˜ao para simplifica¸c˜ao (equa¸c˜ao 2.11); 3. analisar os resultados para as
diferentes fun¸c˜oes de chaveamento, visando a redu¸c˜ao do “chattering”(Figura 2.3 e 2.4).
A se¸c˜ao est´a organizada da seguinte forma: primeiramente apresentamos uma subse¸c˜ao
item, s˜ao analisados trˆes casos: (i) controle descont´ınuo com a fun¸c˜ao sinal (sign); (ii) controle
com camada limite e fun¸c˜ao linear no interior da camada, atrav´es da aplica¸c˜ao da fun¸c˜aosat1
(Figura 2.3); e (iii) controle com camada limite e zona morta no interior da camada, atrav´es
da utiliza¸c˜ao da fun¸c˜ao sat2 (Figura 2.3). Por fim, apresentamos uma subse¸c˜ao com os
resultados obtidos utilizando o controle sem realimenta¸c˜ao para simplifica¸c˜ao, com o objetivo
de reduzir os tempos computacionais e, aplicando a fun¸c˜aosat1, visando obter a caracter´ıstica
de redu¸c˜ao de “chattering”, dada por esta fun¸c˜ao.
2.5.1 Condi¸c˜oes de Simula¸c˜ao
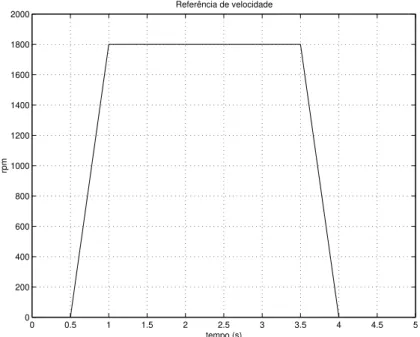
Para a valida¸c˜ao dos objetivos de controle, iremos analisar o desempenho do sistema
atrav´es da aplica¸c˜ao de uma referˆencia de velocidade e de uma perturba¸c˜ao de carga, as quais
est˜ao mostradas na Figura 2.5 e Figura 2.6, respectivamente.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Referência de velocidade
tempo (s)
rpm
Figura 2.5: Referˆencia de velocidade
As especifica¸c˜oes de desempenho visam reproduzir caracter´ısticas de sistemas
industri-ais, tais como, pontes rolantes, guindastes e esteiras transportadoras, os quais apresentam
restri¸c˜oes de acelera¸c˜oes e varia¸c˜oes de torque.
Em uma an´alise das Figuras 2.5 e 2.6 podemos observar que o motor sofre uma acelera¸c˜ao
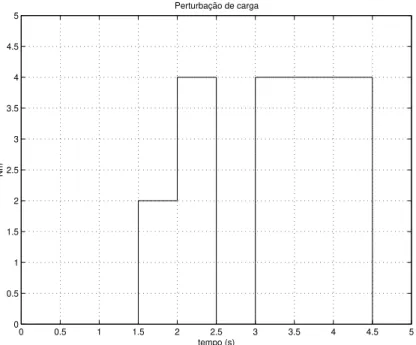
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Perturbação de carga
tempo (s)
Nm
Figura 2.6: Perturba¸c˜ao de carga
de uma desacelera¸c˜ao e a parada total da m´aquina.
Relativamente `a resistˆencia estat´orica, consideramos um erro de +50% do valor nominal,
para todos os casos estudados.
2.5.2 Parˆametros do motor
O motor s´ıncrono de ´ım˜a permanente utilizado apresenta os seguintes valores nominais:
Potˆencia Nominal: 736 W
N´umero de pares de p´olos: 2
Velocidade nominal: 1800 rpm
Tens˜ao nominal: 208 V
Corrente nominal: 3,5 A
Resistˆencia estat´orica: Rs= 1,5 Ohm
Indutˆancia de eixo direto: Ld= 0,0424 H
Indutˆancia de eixo em quadratura: Lq = 0,0795 H
In´ercia (motor e carga): J = 0,003N m/rad/s2
Coeficiente de atrito viscoso: fv = 0,8x10−3 Nm/rad/s
2.5.3 Controle com Realimenta¸c˜ao para Simplifica¸c˜ao
Nesta se¸c˜ao vamos analisar os resultados de simula¸c˜oes obtidos para a lei de controle dada
pela equa¸c˜ao 2.4.
Controle Descont´ınuo - fun¸c˜aosign
Para a realiza¸c˜ao da simula¸c˜ao deve haver o ajuste dos ganhosl1 el2, os quais definem a
dinˆamica de convergˆencia do erro, quando o sistema est´a em deslizamento sobre a superf´ıcie. A
sintonia desses parˆametros ´e feita de modo a obter-se a n˜ao satura¸c˜ao do controle equivalente
[9], permitindo, assim, a aplica¸c˜ao do controle descont´ınuoun.
Al´em da escolha dos parˆametros das superf´ıcies temos, ainda, o ajuste dos parˆametros
Kω e Ki, os quais s˜ao os ganhos do controle descont´ınuo, e que definem a velocidade de
con-vergˆencia das dinˆamicas em dire¸c˜ao `a superf´ıcie de deslizamento. Portanto, est˜ao diretamente
ligados ao chaveamento do controle ou “chattering”, sendo a sintonia desses parˆametros o
re-sultado do compromisso entre a minimiza¸c˜ao do chaveamento e a precis˜ao da resposta do
sistema.
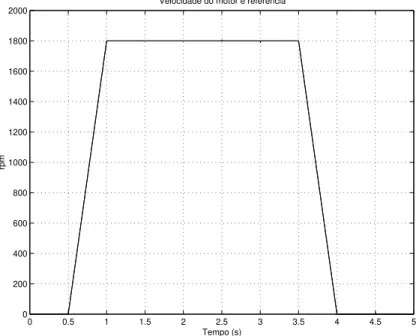
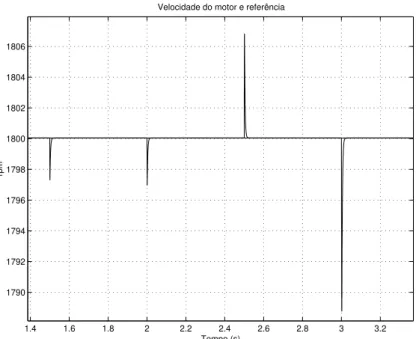
A Figura 2.7 mostra o comportamento da velocidade do motor2. Uma excelente dinˆamica
´e obtida para o seguimento de uma referˆencia de velocidade. Para uma melhor percep¸c˜ao da
resposta de velocidade, a Figura 2.8 mostra, em escala ampliada, o per´ıodo em que a m´aquina
encontra-se `a velocidade nominal (1800rpm).
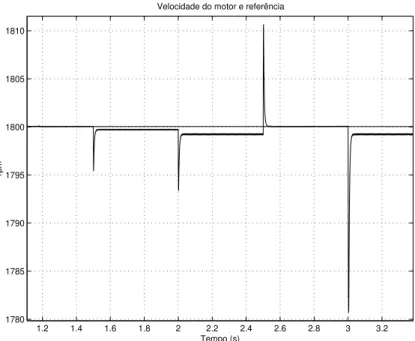
Podemos observar que, durante esse intervalo de tempo, o torque mecˆanico varia,
con-forme Figura 2.6, onde vemos que, ora a carga ´e adicionada em parte ou totalmente, ora ´e
retirada totalmente. Para essa varia¸c˜ao da carga, o sistema tem como resposta um transit´orio
reduzido, cujo pior valor de pico (t=3s) resulta em um erro m´aximo de−1% do valor nominal
da velocidade. J´a para a situa¸c˜ao de regime o erro m´aximo de velocidade fica da ordem de
−0,05% da nominal. Isto mostra um bom desempenho do controlador quanto ao seguimento
de referˆencia da velocidade, apresentando robustez `as perturba¸c˜oes de carga e `as varia¸c˜oes
de resistˆencia estat´orica.
Ao projetarmos o controlador foi utilizada uma segunda premissa para determinar a
su-2
Os valores dos ganhos das superf´ıcies (l1 el2) e do controle descont´ınuo (Kw eKi), para esta simula¸c˜ao,
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0
200 400 600 800 1000 1200 1400 1600 1800 2000
Velocidade do motor e referência
Tempo (s)
rpm
Figura 2.7: Velocidade do motor e referˆencia
1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2
1780 1785 1790 1795 1800 1805 1810
Velocidade do motor e referência
Tempo (s)
rpm
perf´ıcie de corrente, qual seja, de que a referˆencia da corrente de eixo direto isd seria
con-siderada nula para minimizar os efeitos do torque de relutˆancia e garantir que a matriz de
desacoplamento do controle, [b], tivesse sempre inversa. A Figura 2.9 mostra o
comporta-mento da corrente de eixo direto.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
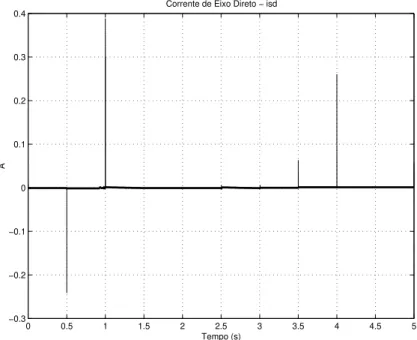
−0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4
Corrente de Eixo Direto − isd
Tempo (s)
A
Figura 2.9: Corrente de eixo direto
Fica clara a capacidade do controlador de levar e manter a sa´ıda de controle para muito
pr´oximo de zero e que os transit´orios de corrente s˜ao de curt´ıssima dura¸c˜ao, apresentando,
no pior caso (t=1s), um valor de pico de 400mA. Para uma melhor an´alise, a Figura 2.10
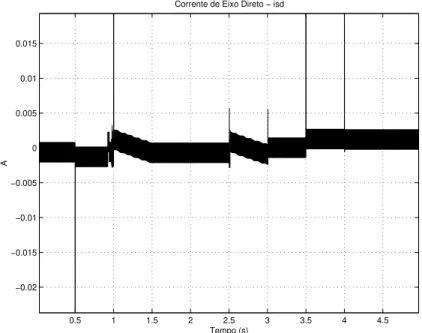
apresenta, em uma escala ampliada, o comportamento da corrente de eixo direto.
Podemos verificar que, em regime, o valor da corrente fica compreendido,
aproximada-mente, entre±3mA. Portanto, tanto o valor de pico no transit´orio, quanto o valor de regime,
s˜ao ´ınfimos se comparados ao valor nominal da corrente do motor, que ´e da ordem de 3,8
A. Conseq¨uentemente, podemos afirmar que o controlador tem pleno ˆexito no controle dessa
vari´avel.
Por´em, havemos de notar que, na Figura 2.10, o valor da corrente n˜ao se estabiliza em
um determinado valor, mas sim, fica oscilando em torno da origem, fato esse que denota um
chaveamento de alta freq¨uˆencia, ou seja, a ocorrˆencia do fenˆomeno designado por
0.5 1 1.5 2 2.5 3 3.5 4 4.5 −0.02
−0.015 −0.01 −0.005 0 0.005 0.01 0.015
Corrente de Eixo Direto − isd
Tempo (s)
A
Figura 2.10: Corrente de eixo direto (amplia¸c˜ao)
atrasos impostos pelos tempos computacionais e dos atrasos nos circuitos eletrˆonicos, fazendo
com que, ao controlador perceber que a superf´ıcieS = 0 foi atingida e, portanto, que a a¸c˜ao
do controle descont´ınuo deve ser retirada, na verdade isso ´e feito quando a superf´ıcie j´a foi
ultrapassada. Ent˜ao, no pr´oximo ciclo computacional j´a haver´a novamente a informa¸c˜ao para
que o controle descont´ınuo volte a atuar, procurando levar a dinˆamica novamente para a
superf´ıcie de deslizamento. Esse efeito se dar´a continuamente gerando o fenˆomeno do
“chat-tering”, o qual ´e altamente indesej´avel, pois diminui o rendimento do sistema, aumentando
as perdas e ru´ıdos, sendo ainda que o mesmo pode excitar dinˆamicas de ordem superior, as
quais n˜ao foram modeladas e, conseq¨uentemente, podendo levar `a instabilidade do sistema.
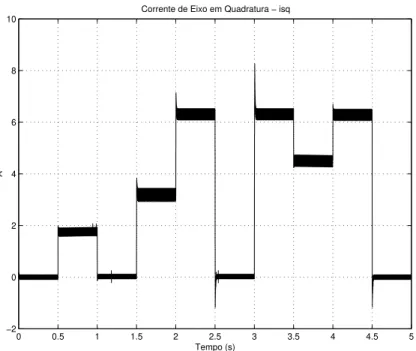
Para melhor evidenciar a ocorrˆencia do “chattering”, na seq¨uˆencia s˜ao mostradas as
Figuras 2.11, 2.12 e 2.13, as quais representam a resposta da corrente de eixo em quadratura,
a tens˜ao estat´orica trif´asica e a corrente estat´orica trif´asica, respectivamente.
Podemos observar claramente o efeito do chaveamento na corrente isq. Uma vez que a
correnteisd´e mantida pr´oxima de zero, o torque mecˆanico ser´a fun¸c˜ao ´unica deisqe, portanto,
teremos uma resposta de torque com oscila¸c˜oes, o que ´e um outro fato indesej´avel.
Destacamos, com maior ˆenfase para a curva da tens˜ao (Figura 2.12), que o “chattering”,
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 −2
0 2 4 6 8 10
Corrente de Eixo em Quadratura − isq
Tempo (s)
A
Figura 2.11: Corrente de eixo em quadratura
2.095 2.1 2.105 2.11 2.115 2.12 2.125 2.13
−250 −200 −150 −100 −50 0 50 100 150 200 250
Tensões Estatóricas
Tempo (s)
V
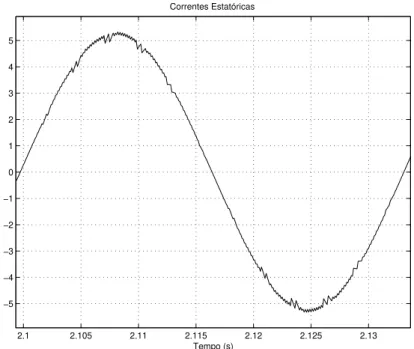
2.1 2.105 2.11 2.115 2.12 2.125 2.13 −5
−4 −3 −2 −1 0 1 2 3 4 5
Correntes Estatóricas
Tempo (s)
A
Figura 2.13: Corrente estat´orica trif´asica
m´odulo de potˆencia um chaveamento cont´ınuo, o que implica maior gera¸c˜ao de ru´ıdos, gera¸c˜ao
de harmˆonicos, conseq¨uentemente reduzindo o rendimento do sistema e aumentando as perdas
no motor.
Controle com Camada Limite - fun¸c˜aosat1
Nesta subse¸c˜ao apresentamos o resultado das simula¸c˜oes para as fun¸c˜oes sat1 e sat2,
conforme definidas na se¸c˜ao 2.3. Os valores de ǫ, para cada uma das fun¸c˜oes, s˜ao ajustados
de forma a obter uma boa rela¸c˜ao custo/benef´ıcio entre a redu¸c˜ao do “chattering”e a obten¸c˜ao
de uma precis˜ao que n˜ao degrade o desempenho do sistema. ´E importante observar que, para
todas as simula¸c˜oes realizadas, consideramos uma varia¸c˜ao de +50% do valor nominal para
as resistˆencias estat´oricas.
A aplica¸c˜ao da fun¸c˜ao sat1 se dar´a tanto para o controle da velocidade, quanto para a
corrente de eixo direto. Os valores de ǫs˜ao diferentes para cada uma das fun¸c˜oes sat1, em
raz˜ao do ajuste da rela¸c˜ao “chattering”/precis˜ao, de cada vari´avel de controle. O ajuste foi
feito na base da tentativa/erro, sendo que, ap´os algumas simula¸c˜oes, obtivemos os seguintes
valores:
ondeǫω define a camada limite para o controle da velocidade eǫi define a camada limite para
o controle da corrente de eixo direto.
O gr´afico da Figura 2.14 representa a resposta da velocidade3 `a referˆencia imposta.
Podemos observar que h´a uma excelente resposta do sistema, por´em, para melhor
verifi-0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Velocidade do motor e referência
Tempo (s)
rpm
Figura 2.14: Velocidade do motor e referˆencia
carmos os resultados, a Figura 2.15 mostra, em escala ampliada, o per´ıodo em que o motor
est´a `a velocidade nominal e sofre varia¸c˜oes de carga.
Verificamos, pela compara¸c˜ao entre as Figuras 2.15 e 2.8, que a dinˆamica da resposta
de velocidade ´e superior `aquela obtida com o controle por modos deslizantes sem o uso da
camada limite. Podemos observar que a resposta transit´oria tem uma sens´ıvel redu¸c˜ao em
seu valor de pico, sendo que no pior caso (t = 3s) o valor fica em torno de −0,6% do valor
nominal e, em regime, n˜ao h´a um valor percept´ıvel de erro, enquanto que no caso anterior,
os valores eram, respectivamente, de −1% e −0,05%.
A Figura 2.16, mostra a resposta completa da corrente de eixo direto. Na Figura 2.17,
temos, em escala ampliada, o comportamento da correnteisd.
Podemos verificar que esta, em compara¸c˜ao com a Figura 2.9, ambas apresentam
tran-3
Os valores dos ganhos das superf´ıcies (l1 el2) e do controle descont´ınuo (Kw eKi), para esta simula¸c˜ao,
1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2 1790
1792 1794 1796 1798 1800 1802 1804 1806
Velocidade do motor e referência
Tempo (s)
rpm
Figura 2.15: Velocidade do motor e referˆencia (amplia¸c˜ao)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−0.5 0 0.5 1
Corrente de Eixo Direto − isd
Tempo (s)
A
0.5 1 1.5 2 2.5 3 3.5 4 4.5 −8
−6 −4 −2 0 2 4 6
8x 10
−4 Corrente de Eixo Direto − isd
Tempo (s)
A
Figura 2.17: Corrente de eixo direto (amplia¸c˜ao)
sit´orios de curt´ıssima dura¸c˜ao, por´em, enquanto aquele mostra oscila¸c˜oes em torno do valor
zero (±2,5mA), neste n˜ao registramos qualquer oscila¸c˜ao em regime, mas sim, a vari´avel bem
definida sobre o valor zero, o que denota ausˆencia de “chattering”. Devemos ressaltar que o
gr´afico da Figura 2.17 tem a amplitude da corrente registrada na ordem de 10−4
A, o que nos
assegura uma excelente resposta do sistema.
Para completar o estudo das respostas obtidas com a fun¸c˜ao sat1, est˜ao mostradas as
Figuras 2.18, 2.19 e 2.20, que representam, respectivamente, a correnteisq, a tens˜ao trif´asica
aplicada ao motor e a corrente trif´asica de estator.
Na an´alise das trˆes figuras supracitadas, podemos observar que o fenˆomeno do
“chatter-ing”foi minimizado significativamente. Tamb´em, ao termos aplicada ao motor uma tens˜ao
puramente senoidal, reduzimos a gera¸c˜ao de ru´ıdos e harmˆonicos, minimizando, com isto, as
perdas.
Controle com Camada Limite - fun¸c˜aosat2
Com o prop´osito de compararmos o desempenho, analisamos o comportamento do sistema
com a utiliza¸c˜ao da fun¸c˜aosat2 na implementa¸c˜ao do controlador. ´E importante ressaltarmos
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 −2
0 2 4 6 8 10
Corrente de Eixo em Quadratura − isq
Tempo (s)
A
Figura 2.18: Corrente de eixo em quadratura
2.095 2.1 2.105 2.11 2.115 2.12 2.125 2.13
−200 −150 −100 −50 0 50 100 150 200
Tensões Estatóricas
Tempo (s)
V