Vasco Miguel
Teot´
onio Brites
de Pinho Santos
COMUNICAC
¸ ˜
OES EM APLICAC
¸ ˜
OES DE
DOM ´
OTICA PARA APOIO A PESSOAS COM
Vasco Miguel
Teot´
onio Brites
de Pinho Santos
COMUNICAC
¸ ˜
OES EM APLICAC
¸ ˜
OES DE
DOM ´
OTICA PARA APOIO A PESSOAS COM
LIMITAC
¸ ˜
AO FUNCIONAL
Disserta¸c˜ao apresentada `a Universidade de Aveiro para cumprimento dos requisitos necess´arios `a obten¸c˜ao do grau de Mestre em Engenharia Electr´onica e Telecomunica¸c˜oes (Mestrado Integrado), realizada sob a ori-enta¸c˜ao cient´ıfica do Dr. Jos´e Alberto Gouveia Fonseca, Professor Associ-ado do Departamento de Electr´onica, Telecomunica¸c˜oes e Inform´atica da Universidade de Aveiro.
`
A minha Alexandra por todo apoio e dedica¸c˜ao.
Aos meus rec´em falecidos Av´o Maria e Avˆo Claudino, por todos os momentos que partilharam com o neto.
Presidente Prof. Dr. Valeri Skliarov
Professor Catedr´atico da Universidade de Aveiro (Por delega¸c˜ao da Reitora da Universidade de Aveiro)
Vogais Prof. Dr. Jos´e Alberto Gouveia Fonseca
Professor Associado da Universidade de Aveiro (Orientador) Dra. Margarida Sizenando Ribeiro da Cunha M´edica Especialista em Fisiatria
Prof. Dr. M´ario Jorge de Andrade Ferreira Alves
acad´emica.
A todos os colegas que directa ou indirectamente contribu´ıram para a realiza¸c˜ao deste projecto.
Ao Professor Doutor Jos´e Alberto Fonseca, um agradecimento espe-cial pela sua orienta¸c˜ao.
Resumo Actualmente, assiste-se `a introdu¸c˜ao de diversas tecnologias nas habita¸c˜oes e lares. Sistemas de automa¸c˜ao de edif´ıcios, outrora de utiliza¸c˜ao exclusiva em edif´ıcios de grande superf´ıcie ou empresas, est˜ao a ser gradualmente in-troduzidos em residˆencias habitacionais. A estrutura t´ecnica destes edif´ıcios pode simplificar as rotinas di´arias e aumentar o conforto dos ocupantes. Um dos principais grupos a beneficiar com este tipo de equipamento s˜ao as pessoas com limita¸c˜oes funcionais. As infraestruturas tecnol´ogicas das habita¸c˜oes podem compensar v´arias das limita¸c˜oes apresentadas pelos ocu-pantes com limita¸c˜oes funcionais. Deste modo, estes utilizadores podem atingir a liberdade e independˆencia que de outra forma n˜ao seria poss´ıvel alcan¸car. Esta disserta¸c˜ao pretende apresentar um sistema de automa¸c˜ao de habita¸c˜oes para pessoas com limita¸c˜oes funcionais. Numa primeira fase ser˜ao identificadas as necessidades habitacionais das pessoas com mobili-dade condicionada, apresentada a actual arquitectura, opera¸c˜ao e imple-menta¸c˜ao do sistema, baseado num protocolo com fios, e efectuada uma descri¸c˜ao do demonstrador implementado no CMRRC Rovisco Pais. Na segunda fase ser˜ao analisadas v´arias tecnologias de transmiss˜ao sem fios, com especial ˆenfase na tecnologia ZigBee, de modo a dotar o sistema de comunica¸c˜oes sem fios.
being gradually introduced in our homes. The technical structure of these automation solutions can simplify the daily routines and raise the comfort of the occupants. One of the main groups to benefit from this type of equipment are the people with functional limitations. The infrastructures of the automated homes can compensate several of the physical limitations of the occupants with functional limitations. In this way, these users can achieve the independence and freedom which, in other way, would be im-possible to reach. This dissertation will present a home automation system for people with severe physical limitations. In a first stage, the adaptations of the houses of people with physical limitations will be identified. The architecture, operation and development of the actual automation system, based in wired communications, will be presented. This part of the work will end with the description of the system prototype implemented in the CMRRC Rovisco Pais. In the second part of this work a research of wireless protocols will be performed with special emphasis on ZigBee. This research will allow the upgrading of the home automation communications system to be based in wireless technology.
1 Introdu¸c˜ao 1-1 1.1 Descri¸c˜ao geral . . . 1-1
1.2 Aplica¸c˜oes de dom´otica baseadas em sistemas sem fios . . . 1-1
1.3 Estrutura da disserta¸c˜ao . . . 1-2
2 Popula¸c˜ao com limita¸c˜oes funcionais 2-1
2.1 Introdu¸c˜ao . . . 2-1
2.2 Paralisia: Defini¸c˜ao e considera¸c˜oes anat´omicas . . . 2-1
2.3 Tipos de paralisia . . . 2-1
2.4 Limita¸c˜oes e condicionalismos . . . 2-2
2.5 Conclus˜ao . . . 2-3
3 Automa¸c˜ao de habita¸c˜oes para pessoas com limita¸c˜oes funcionais 3-1 3.1 Introdu¸c˜ao . . . 3-1
3.2 Estado da arte . . . 3-1
3.2.1 Concept of Automation and Services for people with speciAl needs (CASA) . . . 3-2
3.2.2 Future Senior Living (FSL) - Assistive Automation . . . 3-2
3.2.3 Assistive Home - Dauphinestrasse . . . 3-3
3.3 Retrofitting de habita¸c˜oes convencionais . . . . 3-3
3.4 Aplicabilidade de solu¸c˜oes baseadas em retrofitting . . . . 3-4
3.4.1 Caso de estudo CMRRC-RP . . . 3-4
3.5 Conclus˜ao . . . 3-6
4 Sistema de dom´otica para pessoas com limita¸c˜oes funcionais B-Live 4-1 4.1 Introdu¸c˜ao . . . 4-1
4.2 Arquitectura do sistema . . . 4-1
4.2.1 Arquitectura dos m´odulos . . . 4-2
4.3 Protocolo de comunica¸c˜oes . . . 4-3
4.3.1 Estrutura de dados . . . 4-3
4.3.2 Estrutura das mensagens . . . 4-3
4.3.3 Tipos de mensagens . . . 4-6
4.3.4 Comandos e seu significado . . . 4-7
4.4 Identifica¸c˜ao dos m´odulos . . . 4-8
4.5 Esquemas e organiza¸c˜ao das placas . . . 4-11
4.8 Conclus˜ao . . . 4-19
5 An´alise de solu¸c˜oes de comunica¸c˜ao alternativas 5-1 5.1 Introdu¸c˜ao . . . 5-1
5.2 Power Line Communications (PLC) . . . 5-1
5.2.1 Descri¸c˜ao geral . . . 5-2
5.2.2 Arquitectura . . . 5-3
5.2.3 Protocolos . . . 5-5
5.2.4 Inconvenientes da tecnologia PLC . . . 5-6
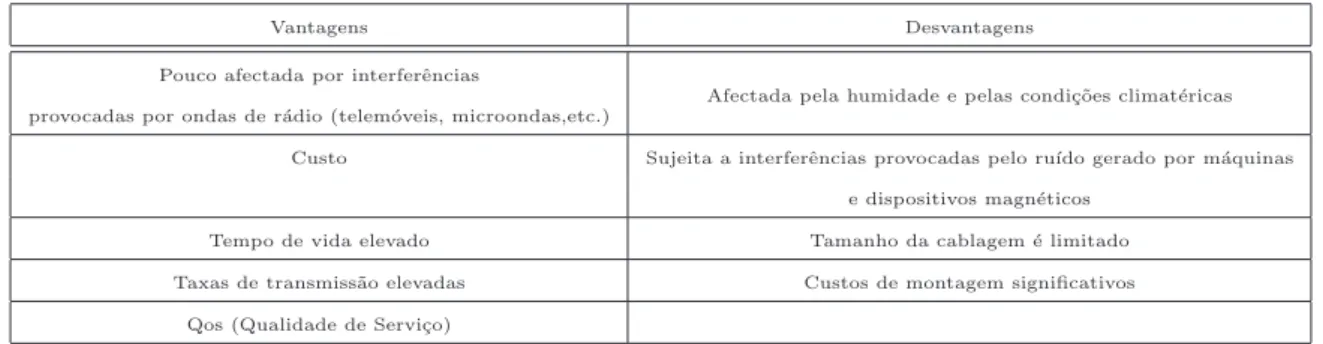
5.3 Solu¸c˜oes cabladas vs solu¸c˜oes sem fios . . . 5-6
5.3.1 Solu¸c˜oes cabladas . . . 5-7
5.3.2 Solu¸c˜oes sem fios . . . 5-8
5.4 Conclus˜ao . . . 5-11
6 Redes Sem Fios para Aplica¸c˜oes Pessoais (WPANs) 6-1
6.1 Introdu¸c˜ao . . . 6-1 6.2 Bluetooth . . . 6-1 6.2.1 Descri¸c˜ao geral . . . 6-2 6.2.2 Arquitectura . . . 6-2 6.2.3 Perfis . . . 6-4 6.3 Wi-Fi . . . 6-4 6.3.1 Descri¸c˜ao geral . . . 6-5 6.3.2 Arquitectura e componentes . . . 6-5 6.4 Ultra-Wide Band . . . 6-8 6.4.1 Descri¸c˜ao geral . . . 6-8 6.5 ZigBee - IEEE 802.15.4 . . . 6-9 6.5.1 Arquitectura protocolar . . . 6-10 6.5.2 Arquitectura da rede . . . 6-13
6.6 Estudo comparativo entre tecnologias sem fios de forma preliminar e resumida 6-18
6.7 Conclus˜ao . . . 6-20
7 Ensaios e prot´otipos 7-1
7.1 Solu¸c˜oes comerciais ZigBee . . . 7-1
7.1.1 MaxStream XBee e XBee-Pro ZigBee OEM . . . 7-1
7.1.2 Radiocrafts RC2300 . . . 7-2
7.1.3 Freescale System in Package (SIP) MC13214 . . . . 7-2
7.2 Testes de performance dos m´odulos XBee e XBee-PRO . . . . 7-3
7.2.1 Ensaios sobre o alcance . . . 7-3
7.2.2 Ensaios sobre a autonomia . . . 7-4
7.3 Integra¸c˜ao dos m´odulos MaxStream ZigBee no sistema dom´otico B-Live . . . 7-6
7.4 Prot´otipos . . . 7-8
7.4.1 Interface com o microcontrolador . . . 7-8
7.4.2 Interface com o PC . . . 7-8
7.5 Ensaios em explora¸c˜ao . . . 7-9
7.5.4 Agosto de 2006 . . . 7-10
7.5.5 Janeiro de 2007 . . . 7-10
7.5.6 Fevereiro de 2007 . . . 7-10
7.6 Discuss˜ao . . . 7-10
3.1 Bairro onde se situa o demonstrador B-Live no Centro Rovisco Pais . . . 3-5
3.2 Caixa de aparelhagem com m´odulo B-Live . . . 3-5
3.3 M´odulo B-Live (porta de entrada) . . . 3-6
3.4 Localiza¸c˜ao dos m´odulos B-Live no demonstrador do Rovisco Pais . . . 3-7
4.1 Arquitectura do sistema B-Live . . . 4-2
4.2 Interac¸c˜ao do sistema B-Live com o exterior . . . 4-2
4.3 Arquitectura dos m´odulos B-Live . . . 4-2
4.4 Arquitectura interna dos m´odulos B-Live . . . 4-3
4.5 Estrutura de dados B-Live . . . 4-4
4.6 Estrutura das mensagens do FIFO . . . 4-4
4.7 Estrutura das mensagens RS232 . . . 4-4
4.8 Estrutura das tramas CAN . . . 4-5
4.9 Correspondˆencia entre mensagens . . . 4-5
4.10 Constru¸c˜ao do campo IDSrc . . . 4-6
4.11 Disposi¸c˜ao dos dados de configura¸c˜ao em mem´oria . . . 4-7
4.12 M´odulo B-Live Placa de Controlo . . . 4-9
4.13 M´odulo B-Live Estores . . . 4-9
4.14 M´odulo B-Live Lˆampadas . . . 4-9
4.15 M´odulo B-Live Dispensador . . . 4-10
4.16 M´odulo B-Live Tomadas . . . 4-10
4.17 Placa de Controlo . . . 4-11
4.18 Placa de BTA26 . . . 4-12
4.19 Placa de BT139 . . . 4-13
4.20 Placa de MOSFETs . . . 4-13
4.21 Placa de Rel´es . . . 4-14
4.22 Placa de Menu Recitado . . . 4-15
4.23 Arquitectura do software B-Live . . . 4-16
4.24 Interface B-Live PC . . . 4-17
4.25 Interface cadeira . . . 4-18
4.26 Interface interruptor e rato de boca . . . 4-18
4.27 Interruptores convencionais . . . 4-19
5.1 Acesso da banda larga PLC . . . 5-2
5.2 Rede dom´otica PLC . . . 5-3
6.3 Perfis Bluetooth . . . 6-4
6.4 IEEE 802.11 standards mapeados no modelo OSI . . . 6-5
6.5 Componentes do protocolo IEEE 802.11 . . . 6-6
6.6 Redes suportadas pelo protocolo 802.11 . . . 6-7
6.7 Largura de banda da tecnologia UWB . . . 6-9
6.8 Plataforma UWB WiMedia . . . 6-9
6.9 Estrutura das camadas do protocolo ZigBee-IEEE 802.15.4 . . . 6-10
6.10 Estrutura da trama da camada F´ısica (PHY) . . . 6-11
6.11 Estrutura da trama da camada MAC . . . 6-11
6.12 Estrutura da trama da camada de Rede (NWK) . . . 6-12
6.13 Estrutura da trama da camada de Aplica¸c˜ao . . . 6-13
6.14 Topologia da rede em Estrela (Star ) . . . . 6-15
6.15 Topologia da rede em ´Arvore (Cluster Tree) . . . . 6-16
6.16 Topologia da rede em Malha (Mesh) . . . . 6-17
6.17 Comunica¸c˜oes ZigBee com sincroniza¸c˜ao (beacon) . . . . 6-18
6.18 Comunica¸c˜oes ZigBee sem sincroniza¸c˜ao (non-beacon) . . . . 6-18
6.19 Estrutura da super trama (superframe) . . . . 6-19
6.20 Compara¸c˜ao entre tecnologias sem fios . . . 6-19
7.1 Gr´afico das perdas de sinal em fun¸c˜ao da distˆancia ao m´odulo base . . . 7-6
7.2 Comunica¸c˜ao ZigBee entre o demonstrador B-Live e PC . . . 7-6
7.3 API X-CTU m´odulos ZigBee MaxStream . . . 7-7
7.4 Interface MIOBee . . . 7-8
7.5 Circuito interface XBee . . . 7-9
2.1 Condicionalismos no dia-a-dia de uma pessoa com limita¸c˜oes funcionais . . . 2-3
5.1 Vantagens e desvantagens das solu¸c˜oes cabladas . . . 5-7
5.2 Vantagens e desvantagens das solu¸c˜oes sem fios . . . 5-8
6.1 Estrutura das tramas da camada MAC . . . 6-11
6.2 Tipos de dispositivos ZigBee de acordo com a especifica¸c˜ao IEEE 802.15.4 . . 6-14
6.3 Tipos e fun¸c˜oes dos dispositivos ZigBee . . . 6-14
6.4 Compara¸c˜ao entre tecnologias sem fios . . . 6-20
7.1 Caracter´ısticas dos m´odulos XBee e XBee-PRO . . . 7-2
7.2 Caracter´ısticas do m´odulo RC2300 . . . 7-3
7.3 Caracter´ısticas do m´odulo MC13214 . . . 7-4
7.4 Kit de desenvolvimento da MaxStream . . . 7-5
7.5 Perdas de sinal indoor para diferentes tipos de m´odulos e antenas . . . . 7-6
7.6 Autonomia de uma pilha de 9V (6LR61) - Coordinator e Router . . . . 7-7
Cap´ıtulo 1
Introdu¸c˜
ao
1.1
Descri¸c˜
ao geral
A Dom´otica aplicada `as habita¸c˜oes ´e uma ´area em franca expans˜ao devido `as potencialidades, quer a n´ıvel de conforto, quer a n´ıvel de poupan¸ca energ´etica que advˆem da sua utiliza¸c˜ao. Existem, no entanto, trˆes factores negativos nos sistemas actuais: n˜ao s˜ao desenvolvidos com base nas limita¸c˜oes funcionais de pessoas idosas ou com deficiˆencia motora (parapl´egicas e tetrapl´egicas), s˜ao de custo elevado por implicarem a aquisi¸c˜ao de produtos desenvolvidos especificamente para esse fim e baseiam-se frequentemente em solu¸c˜oes cabladas centralizadas. As solu¸c˜oes de dom´otica nas habita¸c˜oes ganham maior importˆancia quando se analisam os longos per´ıodos que pessoas com limita¸c˜oes funcionais graves, quer sejam permanentes ou tempor´arias, passam nas suas habita¸c˜oes e a autonomia, praticamente nula, perante os seus cuidadores. Segundo dados obtidos atrav´es do Instituto Nacional de Estat´ıstica, no in´ıcio de 2006 existiam em Portugal continental 1.747.700 habitantes com idade superior a 65 anos, dos quais 357.492 possu´ıam algum tipo de incapacidade funcional. A partir destes dados facilmente se verifica que s˜ao muitos os potenciais utilizadores de sistemas de automa¸c˜ao para fazer face `as limita¸c˜oes naturais de pessoas idosas, parapl´egicas e tetrapl´egicas.
Com o objectivo de facilitar o dia a dia de pessoas com graves limita¸c˜oes funcionais, a Universidade de Aveiro, o Centro de Medicina de Reabilita¸c˜ao da Regi˜ao Centro - Rovisco Pais e a empresa Micro I/O criaram uma parceria para desenvolver um sistema dom´otico de apoio `a reabilita¸c˜ao (DoRe) de pessoas com limita¸c˜oes funcionais graves. O autor desta disserta¸c˜ao participou no projecto tendo desenvolvido v´arios dos subsistemas actualmente dispon´ıveis. Nesta disserta¸c˜ao apresenta-se parte desse trabalho, embora se tenha como ob-jectivo fundamental estudar a possibilidade de dotar o sistema DoRe de solu¸c˜oes sem fios de forma a substitu´ırem as actuais solu¸c˜oes cabladas, com todas as vantagens inerentes a essa altera¸c˜ao.
1.2
Aplica¸c˜
oes de dom´
otica baseadas em sistemas sem fios
Os sistemas sem fios s˜ao actualmente utilizados em diversas aplica¸c˜oes, tais como comu-nica¸c˜oes, electr´onica de consumo, inform´atica e automa¸c˜ao. As raz˜oes porque estes sistemass˜ao cada vez mais utilizados, em detrimento dos sistemas com fios, deve-se essencialmente `a redu¸c˜ao de custos na manuten¸c˜ao destes sistemas e ausˆencia de cablagem, `a mobilidade acrescida e `a simplicidade de altera¸c˜ao da topologia da rede.
O n´umero de habita¸c˜oes com sistemas de automa¸c˜ao que aliam conforto, comodidade e redu¸c˜oes energ´eticas, tem vindo a aumentar. Estes sistemas permitem controlar diversas funcionalidades das habita¸c˜oes, como ilumina¸c˜ao e acessos. S˜ao, no entanto, essencialmente baseados em sistemas de comunica¸c˜ao com fios, na maior parte das vezes centralizados, mesmo ao n´ıvel da camada f´ısica, implicando cablagens entre cada dispositivo e um sistema central. A introdu¸c˜ao de sistemas sem fios em aplica¸c˜oes de dom´otica permite dot´a-los das van-tagens das solu¸c˜oes sem fios quando comparadas com as solu¸c˜oes cabladas, e permite que as funcionalidades sejam adicionadas `as habita¸c˜oes convencionais sem que sejam necess´arias muitas adapta¸c˜oes.
1.3
Estrutura da disserta¸c˜
ao
Este trabalho est´a dividido em cinco partes:1. Estudo sobre os tipos de paraplegia e tetraplegia existentes, identificando as limita¸c˜oes e condicionalismos que as pessoas com este tipo de les˜oes enfrentam nas suas rotinas di´arias.
2. Identifica¸c˜ao das necessidades de automa¸c˜ao de habita¸c˜oes convencionais para pessoas com limita¸c˜oes funcionais, e an´alise do caso de estudo do Centro de Medicina de Rea-bilita¸c˜ao da Regi˜ao Centro - Rovisco Pais (CMRRC-RP).
3. Descri¸c˜ao de um sistema de dom´otica para pessoas com limita¸c˜oes funcionais.
4. Estudo de solu¸c˜oes alternativas ao protocolo de comunica¸c˜ao do sistema de dom´otica proposto, nomeadamente, outras tecnologias cabladas e protocolos de comunica¸c˜ao sem fios.
5. Descri¸c˜ao dos ensaios experimentais efectuados e desenvolvimento de prot´otipos. No cap´ıtulo 2, como resultado do estudo sobre os tipos de paraplegia e tetraplegia exis-tentes, bem como das limita¸c˜oes e condicionalismos que as pessoas com este tipo de les˜oes enfrentam nas suas rotinas di´arias, procurar-se-´a identificar e fundamentar as motiva¸c˜oes inerentes ao desenvolvimento deste trabalho.
No cap´ıtulo 3 ser˜ao identificadas as necessidades de automa¸c˜ao de habita¸c˜oes convencionais de pessoas com limita¸c˜oes funcionais e analisado o caso de estudo do demonstrador presente no CMRRC-RP, a experiˆencia da sua utiliza¸c˜ao por parte dos pacientes deste centro e os melhoramentos a realizar futuramente.
No cap´ıtulo 4, ser´a apresentado o B-Live, nome de baptismo do sistema desenvolvido no ˆambito do projecto DoRe. Trata-se de um sistema de dom´otica de apoio a pessoas idosas ou com algum tipo de paralisia. Ser´a efectuada uma descri¸c˜ao da arquitectura do sistema,
do protocolo de comunica¸c˜ao, da arquitectura do software e das m´ultiplas interfaces homem-m´aquina (HMIs).
Nos cap´ıtulos 5 e 6, ser´a efectuado um estudo que visa procurar solu¸c˜oes alternativas ao meio de comunica¸c˜ao actualmente presente no sistema B-Live (Controller Area Network). Este estudo consiste em confrontar solu¸c˜oes cabladas com solu¸c˜oes sem fios, nomeadamente as vantagens e desvantagens de cada uma, em apresentar uma alternativa cablada (Power Line Communications) e diversas solu¸c˜oes sem fios (Bluetooth, Wi-Fi, Ultra Wide-Band e ZigBee).
No cap´ıtulo 7, ser˜ao apresentados os resultados dos ensaios experimentais efectuados e o desenvolvimento de prot´otipos. Este cap´ıtulo inclui ainda um estudo sobre as caracter´ısticas de algumas solu¸c˜oes comerciais ZigBee.
O cap´ıtulo 8 conclui esta disserta¸c˜ao e apresenta alguns pontos a desenvolver em trabalho futuro.
Cap´ıtulo 2
Popula¸c˜
ao com limita¸c˜
oes funcionais
2.1
Introdu¸c˜
ao
Entende-se por limita¸c˜oes funcionais qualquer incapacidade de foro f´ısico ou psicol´ogico que impossibilite a realiza¸c˜ao de uma actividade ou tarefa do dia-a-dia.
Este cap´ıtulo pretende fazer uma breve descri¸c˜ao do conceito paralisia, sua defini¸c˜ao, considera¸c˜oes anat´omicas e tipos de les˜ao. Ser´a analisada a problem´atica que as pessoas com este tipo de incapacidade enfrentam nas actividades di´arias, nas suas habita¸c˜oes e locais de trabalho.
2.2
Paralisia: Defini¸c˜
ao e considera¸c˜
oes anat´
omicas
O termo paralisia prov´em do Grego paralysis, das palavras para, ”ao lado de”e lysis, ”perda”ou ”quebra”[1]. Na medicina, este termo ´e referido como a perda de uma fun¸c˜ao sensorial ou motora. Quando associado ao sistema motor, paralysis define-se como a perda do acto volunt´ario de movimento devido `a interrup¸c˜ao do via de comunica¸c˜ao entre o c´erebro e os m´usculos.
As causas mais frequentes que provocam paralisia s˜ao os traumatismos medulares provo-cados por acidentes de via¸c˜ao, mergulhos em ´aguas rasas, tuberculose, esclerose m´ultipla e o s´ındrome de Guillain-Barr´e ou polirradiculoneurite aguda.
2.3
Tipos de paralisia
De acordo com a localiza¸c˜ao e distribui¸c˜ao dos m´usculos enfraquecidos, ´e poss´ıvel definir os seguintes tipos de paralisia [2]:
Monoplegia - Enfraquecimento ou paralisia de todos os m´usculos de um membro inferior ou superior.
Paraplegia - Enfraquecimento ou paralisia de ambas as pernas, dos grupos musculares abaixo da les˜ao e altera¸c˜oes sobre outros org˜aos e sistemas.
Quadriplegia (tetraplegia) - Enfraquecimento ou paralisia dos quatro membros (pernas e bra¸cos), dos grupos musculares abaixo da les˜ao (ex. m´usculos respirat´orios) e altera¸c˜oes sobre outros org˜aos e sistemas (ex. controlo de esf´ıncteres).
Em [3], o grau da les˜ao ´e definido de acordo com a zona da medula afectada. Deste modo s˜ao consideras quatro zonas de acordo com a divis˜ao, por segmentos, da medula (coluna vertebral):
V´ertebras cervicais (C1-C7)
V´ertebras tor´acicas (D1-D12)
Zona lombar (L1-L5)
Sacro e C´occis (S1-S5)
2.4
Limita¸c˜
oes e condicionalismos
A fase da vida de um paciente ap´os uma les˜ao grave na medula ´e um per´ıodo muito complicado e determinante, na medida em que a pessoa tem que se adaptar ao que ser´a, provavelmente, uma vida de incapacidade e condicionalismos definitivos.
Nesta fase de adapta¸c˜ao ´e necess´ario elaborar um plano de ajuste `a nova realidade do paciente que permita que este atinja um n´ıvel de independˆencia, f´ısico e psicol´ogico, o mais elevado poss´ıvel, face `as suas limita¸c˜oes. Este plano ´e normalmente elaborado pelo m´edico fisiatra que acompanhou todo o processo de desenvolvimento e recupera¸c˜ao da les˜ao do paci-ente e, em conjunto com a fam´ılia, permite que este se adapte `as novas circunstˆancias na sua habita¸c˜ao, trabalho e vida social.
Estas medidas dependem, obviamente, do n´ıvel neurol´ogico da les˜ao da coluna vertebral do paciente. No entanto, com o recurso `as novas tecnologias e inova¸c˜oes na ´area de automa¸c˜ao, ´e poss´ıvel adaptar as habita¸c˜oes e locais de trabalho de forma a que estas dificuldades possam ser ultrapassadas com sucesso.
A Tabela 2.1 estabelece a correspondˆencia entre o grau de les˜ao da coluna vertebral de uma pessoa com limita¸c˜oes funcionais e as actividades que esta consegue realizar no seu dia-a-dia [4].
Analisando os dados da tabela verifica-se que, quanto mais elevado ´e o grau da les˜ao da coluna vertebral, maiores s˜ao as limita¸c˜oes dos indiv´ıduos.
No caso de les˜oes de n´ıvel C4 a independˆencia ´e nula. Pessoas que sofrem deste tipo de les˜ao medular necessitam de acompanhamento permanente para realizarem as rotinas di´arias. A interac¸c˜ao com o meio exterior apenas ´e poss´ıvel com equipamentos adequados utilizando interfaces que permitam o controlo com a cabe¸ca (queixo, boca, testa e vis˜ao). Ser˜ao nestes casos que as ajudas t´ecnicas, nomeadamente adapta¸c˜oes nas habita¸c˜oes e locais de trabalho, desempenham um papel de maior relevo.
N´ıvel de les˜ao Habilidades funcionais
C4
Dependˆencia total
Consegue utilizar uma cadeira de rodas controlando-a atrav´es do queixo Consegue escrever e utilizar um computador utilizando um suporte para boca Necessita de um sistema de automa¸c˜ao para controlar o ambiente da casa para ligar lˆampadas, abrir portas, utilizando interfaces convenientes
C5
Consegue alimentar-se utilizando um auxiliar t´ecnico adequado Consegue lavar a cara, pentear o cabelo, lavar os dentes utilizando um auxiliar t´ecnico adequado
Consegue prestar aux´ılio ao vestir a parte superior do corpo Consegue utilizar uma cadeira de rodas para se deslocar em terrenos planos e distˆancias pequenas utilizando umas luvas apropriadas Para ter mobilidade funcional necessita de uma cadeira el´ectrica N˜ao ´e poss´ıvel proceder `a sua transferˆencia
C6
Ainda necessita do aux´ılio de uma cinta para se alimentar Ainda necessita do aux´ılio de uma cinta para cuidados pr´oprios Consegue vestir a parte superior do corpo sem aux´ılio Consegue prestar aux´ılio ao vestir a parte inferior do corpo Consegue utilizar uma cadeira de rodas em terrenos com ligeiras inclina¸c˜oes
Consegue por vezes proceder de uma forma independente `a transferˆencia para o carro ou cama
Consegue conduzir com controlo manual
C7
Consegue ser totalmente independente ao n´ıvel dos membros superiores Consegue transferir-se, alimentar-se e vestir-se de uma forma independente Consegue conduzir com controlo manual
C8 Vida totalmente independente de uma cadeira de rodas
Tabela 2.1: Condicionalismos no dia-a-dia de uma pessoa com limita¸c˜oes funcionais
As pessoas com les˜oes de n´ıvel C5 e C6 possuem uma maior autonomia que no caso ante-rior, na medida em que conseguem utilizar os membros superiores para desempenhar algumas tarefas b´asicas. Necessitam, no entanto, de assistˆencia t´ecnica ou humana para desempe-nharem tarefas de complexidade mais elevada. Nas les˜oes de n´ıvel C7 e C8 a independˆencia ´e total ou praticamente total. As ajudas t´ecnicas, neste caso, podem ser vistas como uma melhoria do conforto e qualidade de vida, na medida em que facilitam a realiza¸c˜ao de tarefas que de outro modo se tornariam de dif´ıcil resolu¸c˜ao.
2.5
Conclus˜
ao
Conclui-se desta an´alise que, independentemente do grau de severidade da les˜ao neurol´ogica, ´e necess´ario introduzir altera¸c˜oes nas rotinas di´arias e proceder a adapta¸c˜oes nas habita¸c˜oes e locais de trabalho de forma a melhorar a qualidade de vida dos indiv´ıduos, aumentando a sua habilidade para executar as actividades do dia-a-dia de uma forma independente.
Cap´ıtulo 3
Automa¸c˜
ao de habita¸c˜
oes para
pessoas com limita¸c˜
oes funcionais
3.1
Introdu¸c˜
ao
A estrutura da popula¸c˜ao nos pa´ıses industriais est´a a alterar-se. No futuro, existir˜ao menos indiv´ıduos para cuidar do n´umero crescente de pessoas com limita¸c˜oes funcionais.
Os custos de assistˆencia de pessoas com limita¸c˜oes funcionais em centros especializados ou em habita¸c˜oes com assistˆencia domicili´aria s˜ao elevados e suportados em grande parte pelo Estado. Deste modo, ´e economicamente mais vi´avel criar as condi¸c˜oes adequadas para que as pessoas possam viver durante mais tempo nas suas habita¸c˜oes. Neste contexto, as tecnologias que permitem assistir as pessoas com limita¸c˜oes funcionais nas suas casas ´e vista como uma op¸c˜ao muito atractiva.
Em [5], [6] e [7] s˜ao propostas algumas solu¸c˜oes de dom´otica para pessoas com limita¸c˜oes funcionais. Todos estes projectos real¸cam a importˆancia do desenvolvimento de sistemas de apoio nas habita¸c˜oes de pessoas idosas ou com algum tipo de paralisia. No entanto, a utiliza¸c˜ao desta tecnologia apenas ser´a uma op¸c˜ao atractiva se for claramente demonstrado que os custos de desenvolvimento s˜ao justificados pela eficiˆencia dos servi¸cos prestados.
3.2
Estado da arte
Nesta sec¸c˜ao ser´a efectuada uma breve discuss˜ao sobre trˆes sistemas de dom´otica para pessoas com limita¸c˜oes funcionais: Concept of Automation and Services for people with speciAl needs (CASA), Future Senior Living (FSL) - Assistive Automation e Assistive Home - Dauphi-nestrasse. Estes sistemas distinguem-se pelas funcionalidades suportadas, pelos protocolos de comunica¸c˜ao utilizados e pelos servi¸cos fornecidos. Alguns destes sistemas ainda se encontram em fase de investiga¸c˜ao, outros j´a est˜ao numa vers˜ao comercial. Note-se que o levantamento n˜ao ´e exaustivo. Pretende-se apenas acrescentar sistemas do tipo do proposto nesta dis-serta¸c˜ao dentro da pan´oplia de iniciativas em curso actualmente. A escolha reflecte apenas op¸c˜oes individuais deste autor, n˜ao pretendendo inferir uma taxonomia.
3.2.1 Concept of Automation and Services for people with speciAl needs (CASA)
Os objectivos do projecto CASA [5] eram desenvolver e testar diversas tecnologias aplicadas `as habita¸c˜oes, como um meio de suporte a pessoas com limita¸c˜oes funcionais. Este projecto teve como base o trabalho de um projecto anterior [8], alargando os produtos dispon´ıveis e integrando tecnologias de servi¸co de apoio ao utilizador. A tecnologia desenvolvida foi instalada em trˆes habita¸c˜oes na cidade de Sarago¸ca e contou com a participa¸c˜ao de uma empresa de seguran¸ca, de forma a fornecer servi¸cos de alarme.
As funcionalidades do sistema CASA instaladas em cada uma das habita¸c˜oes, variavam consoante as necessidades de cada um dos utilizadores. Estas funcionalidades podem ser agrupadas em dois grupos: monitoriza¸c˜ao e controlo de dispositivos dom´esticos. As funci-onalidades de monitoriza¸c˜ao incluem: detec¸c˜ao de inunda¸c˜oes, g´as, fumo ou mon´oxido de carbono, intrus˜ao, campainha na porta da frente quando actuada, abertura de janelas e por-tas, actividade dentro da habita¸c˜ao, abertura da porta do frigor´ıfico por longos per´ıodos, funcionamento do forno el´ectrico, ausˆencia do utilizador da cama durante a noite, corte au-tom´atico no fornecimento de ´agua numa emergˆencia e bot˜oes de alarme e emergˆencia. O controlo de dispositivos dom´esticos consiste em: operar sobre o sistema de seguran¸ca, luz da sala-de-estar e sirenes interiores e exteriores, controlar o abastecimento de ´agua da habita¸c˜ao, destrancar a porta da frente, solicitar aux´ılio durante uma emergˆencia ou assistˆencia no geral, obter informa¸c˜ao sobre o estado da habita¸c˜ao e receber mensagens de texto do centro de servi¸co externo.
O sistema ´e composto por uma unidade de controlo que recebe toda a informa¸c˜ao dos sensores e actuadores, utilizando como meio de comunica¸c˜ao o protocolo Power Line. A unidade de controlo ´e constitu´ıda por um microcomputador dedicado, ligado a um sistema de alarme telef´onico comercial. Os dispositivos presentes na habita¸c˜ao s˜ao operados localmente atrav´es de um controlo remoto em conjunto com um sistema de menus disponibilizado numa televis˜ao, ou remotamente atrav´es da liga¸c˜ao ao centro de apoio. A liga¸c˜ao ao centro de apoio inclui um operador a tempo completo respons´avel pela monitoriza¸c˜ao do sistema de seguran¸ca da habita¸c˜ao, assistˆencia em caso de emergˆencia e servi¸co de apoio geral.
Este projecto foi completado em Fevereiro de 1997.
3.2.2 Future Senior Living (FSL) - Assistive Automation
O projecto Assistive Automation (AA) [6] integra-se num projecto de maior dimens˜ao deno-minado Future Senior Living (FSL). O objectivo do projecto FSL ´e procurar solu¸c˜oes, n˜ao exclusivamente t´ecnicas, que permitam que as pessoas idosas vivam com melhores condi¸c˜oes, mais tempo e maior seguran¸ca nas suas habita¸c˜oes. Este projecto consiste na an´alise de diversas tecnologias, entrevistas a utilizadores, projec¸c˜ao e desenvolvimento de sistemas e de-monstra¸c˜oes ao p´ublico. As tecnologias de interesse do projecto AA s˜ao as redes de dom´otica, servidores para habita¸c˜oes, comunica¸c˜oes sem fios e tecnologia RFID (Radio-Frequency Iden-tification).
O projecto AA ´e financiado por um grupo de parceiros finlandeses, composto por empresas tecnol´ogicas, universidades, laborat´orios de investiga¸c˜ao, departamentos de servi¸cos sociais e
associa¸c˜oes de beneficˆencia para pessoas idosas ou com algum tipo de deficiˆencia.
Este projecto coopera de perto com o centro Toimiva koti (TK) (Casa Funcional). Este centro de exposi¸c˜oes permite que os visitantes encontrem dispositivos, servi¸cos e solu¸c˜oes de acessibilidade para pessoas idosas ou com algum tipo de invalidez. O centro ´e composto por dois apartamentos, duas salas de exibi¸c˜ao e uma sala de estudo. Os apartamentos est˜ao mobilados e equipados de forma a dar uma impress˜ao realista do aspecto e funcionamento dos dispositivos e dos sistemas. Os visitantes podem deslocar-se na habita¸c˜ao e experimentar os diversos dispositivos. A grande maioria dos produtos em exposi¸c˜ao est˜ao dispon´ıveis em vers˜oes comerciais.
3.2.3 Assistive Home - Dauphinestrasse
Em 2003 foi projectado um edif´ıcio residencial para nove pessoas com limita¸c˜oes f´ısicas em Linz, ´Austria. De modo a aumentar a independˆencia e liberdade pessoal dos ocupantes, os apartamentos foram projectados como Assistive Homes (habita¸c˜oes com adapta¸c˜oes para pessoas com limita¸c˜oes funcionais). As especifica¸c˜oes destes apartamentos e a arquitectura t´ecnica das infraestruturas foram definidas com base num projecto anterior, na mesma cidade, denominado Projekt Casa.
As funcionalidades presentes nos apartamentos s˜ao as seguintes: controlo de acessos, in-tercomunicador na porta de acesso principal, abertura da porta, janelas, persianas e estores, controlo da temperatura do aquecimento, fecho autom´atico do fog˜ao, interface IR (infraver-melhos) e sistema de aux´ılio em caso de emergˆencia.
Cada apartamento est´a equipado com o seu pr´oprio sistema de automa¸c˜ao (EIB [9]/ Kon-nex [10]) de modo a interligar todos os dispositivos el´ectricos. Este sistema ´e complementado com uma interface IR, que consiste em v´arios receptores (um por apartamento) e um descodi-ficador. Deste modo, cada apartamento pode ser controlado utilizando controlos remotos por infravermelhos. Em cada apartamento existem quatro sistemas (redes) independentes, n˜ao baseados nos sistemas EIBA/KONNEX. Estes sistemas s˜ao os seguintes: sistema de aux´ılio em caso de emergˆencia, intercomunicador da porta de acesso principal, controlo de acessos e alarme de incˆendios. Todos os dispositivos el´ectricos dos apartamentos, como os interruptores para lˆampadas ou estores, est˜ao concentrados num painel de controlo central. Deste modo, o utilizador pode operar sobre todos os dispositivos a partir do mesmo local.
3.3
Retrofitting de habita¸c˜
oes convencionais
Um dos principais custos inerentes aos sistemas de dom´otica de apoio a pessoas idosas ou com mobilidade condicionada reside precisamente na constru¸c˜ao de edif´ıcios que permitam a integra¸c˜ao deste tipo de sistemas. De facto, a maior parte das habita¸c˜oes das pessoas com limita¸c˜oes funcionais n˜ao foram projectadas para permitirem a instala¸c˜ao de sistemas de dom´otica. Por este motivo, ´e recorrente utilizaram-se t´ecnicas de adapta¸c˜ao. Utilizar-se-´a a partir de agora o tempo retrofitting na vers˜ao inglesa.
O termo retrofit deriva da express˜ao latina retro (movimentar-se para tr´as) e inglesa fit (adapta¸c˜ao, ajuste). Surgiu na Europa e Estados Unidos, onde ´e uma pr´atica muito comum.
Esta t´ecnica tem como objectivo revitalizar antigos edif´ıcios, aumentando a sua vida ´util, atrav´es da incorpora¸c˜ao de tecnologias modernas e da utiliza¸c˜ao dos mais avan¸cados materiais. Nestes pa´ıses, a r´ıgida legisla¸c˜ao n˜ao consentiu que o rico patrim´onio arquitect´onico fosse substitu´ıdo, abrindo espa¸co para o surgimento desta solu¸c˜ao que permite a sua preserva¸c˜ao, ao mesmo tempo que possibilita a utiliza¸c˜ao adequada do im´ovel.
Em qualquer das situa¸c˜oes o retrofit implica renova¸c˜ao. Neste sentido percebe-se que difere substancialmente da simples restaura¸c˜ao, que consiste na restitui¸c˜ao do im´ovel `a sua condi¸c˜ao original, ou da reforma, que visa a introdu¸c˜ao de melhorias, sem compromisso com as suas caracter´ısticas anteriores.
3.4
Aplicabilidade de solu¸c˜
oes baseadas em retrofitting
Nesta sec¸c˜ao ser´a efectuada uma descri¸c˜ao de um prot´otipo de um sistema para apoio a pessoas com limita¸c˜oes funcionais. Este sistema encontra-se no Centro de Medicina de Reabilita¸c˜ao da Regi˜ao Centro - Rovisco Pais (CMRRC-RP), de modo a permitir a adequa¸c˜ao das solu¸c˜oes implementadas por parte dos pacientes deste centro. O feedback destes utilizadores permitir´a melhorar as funcionalidades desenvolvidas at´e ao momento e desenvolver novos prot´otipos. O objectivo ´ultimo ´e que estas pessoas possam ultrapassar as dificuldades de funcionamento encontradas nas suas habita¸c˜oes.
3.4.1 Caso de estudo CMRRC-RP
O CMRRC Rovisco Pais criou uma unidade destinada a ensino e forma¸c˜ao de doentes inter-nados em reabilita¸c˜ao e aos seus cuidadores. Essa unidade pretende treinar os doentes e os acompanhantes de modo a ultrapassar as dificuldades de realizarem, com as limita¸c˜oes que passaram a ter, uma vida no seu ambiente normal, i.e., nas habita¸c˜oes onde viviam antes ou onde ir˜ao viver ap´os o cumprimento do programa terapˆeutico de reabilita¸c˜ao em regime de internamento.
A unidade consiste numa s´erie de pequenas habita¸c˜oes que disp˜oem de algumas adapta¸c˜oes f´ısicas para promover a funcionalidade dos pacientes em cadeira de rodas e/ou com outras limita¸c˜oes de mobilidade: adapta¸c˜oes e ajudas t´ecnicas na casa de banho, cozinha, ligeiro aumento na largura das portas, acessos. No entanto, essas habita¸c˜oes n˜ao se apresentam muito distintas duma habita¸c˜ao convencional (Figura 3.1).
Demonstrador com funcionalidades b´asicas
Foi desenvolvido e instalado um demonstrador numa das habita¸c˜oes de forma a permitir ao paciente controlar algumas funcionalidades b´asicas da habita¸c˜ao, como o acesso, a ilumina¸c˜ao, as comunica¸c˜oes e o entretenimento. Este demonstrador permite afinar e verificar a adequa¸c˜ao das solu¸c˜oes implementadas, sustentando a transferˆencia para a utiliza¸c˜ao real.
Actualmente, as funcionalidades presentes no demonstrador s˜ao as seguintes:
Figura 3.1: Bairro onde se situa o demonstrador B-Live no Centro Rovisco Pais Ilumina¸c˜ao: luzes e persianas.
Comunica¸c˜oes: telefone e internet.
As Figuras 3.2 e 3.3 representam, respectivamente, uma caixa de aparelhagem com o m´odulo B-Live e o m´odulo da porta de entrada.
Figura 3.2: Caixa de aparelhagem com m´odulo B-Live
A Figura 3.4 representa a planta do demonstrador B-Live. Na figura ´e poss´ıvel observar a localiza¸c˜ao dos diversos m´odulos dispostos pela habita¸c˜ao.
O sistema dom´otico presente no demonstrador ´e um sistema modular e distribu´ıdo. Para o efeito, existem diversos sensores e actuadores, que trocam informa¸c˜ao entre si utilizando como meio de comunica¸c˜ao o protocolo CAN (Controller Area Network). Os m´odulos s˜ao constitu´ıdos por microcontroladores dotados das interfaces adequadas. O utilizador tem ao seu dispor interfaces convencionais, como os interruptores das lˆampadas e estores, e interfaces desenvolvidas de acordo com as limita¸c˜oes de cada utilizador.
Figura 3.3: M´odulo B-Live (porta de entrada)
3.5
Conclus˜
ao
Neste cap´ıtulo foram apresentadas algumas solu¸c˜oes de dom´otica para pessoas com limita¸c˜oes funcionais. Este estudo permitiu verificar a importˆancia do desenvolvimento destes sistemas, de forma a auxiliar as pessoas idosas ou com algum tipo de paralisia, nas suas habita¸c˜oes.
Foi tamb´em definido o conceito de retrofitting, e as vantagens da sua utiliza¸c˜ao nas ha-bita¸c˜oes de pessoas com mobilidade condicionada.
Foi analisado o caso de estudo do CMRRC Rovisco Pais, nomeadamente os objectivos e linhas de actua¸c˜ao, bem como os benef´ıcios a retirar da experimenta¸c˜ao do sistema por parte dos pacientes do Centro.
Cap´ıtulo 4
Sistema de dom´
otica para pessoas
com limita¸c˜
oes funcionais B-Live
4.1
Introdu¸c˜
ao
Neste cap´ıtulo ser´a apresentado o sistema de dom´otica para pessoas com limita¸c˜oes funci-onais, B-Live [11]. Este sistema tem como objectivos melhorar as condi¸c˜oes funcionais de habitabilidade de casas convencionais para doentes com mobilidade extremamente reduzida, nomeadamente tornando-os suficientemente aut´onomos para que seja dispensada a presen¸ca em permanˆencia de um acompanhante. O sistema tem em considera¸c˜ao que a tecnologia a introduzir tˆem de ser de custo controlado para que a sua aplica¸c˜ao seja vi´avel.
Ser´a efectuada uma descri¸c˜ao da arquitectura do sistema, do protocolo de comunica¸c˜ao, da arquitectura do software e das m´ultiplas HMIs.
4.2
Arquitectura do sistema
O sistema dom´otico para controlo de casas (B-Live) modular (Figura 4.1). Cada um dos m´odulos que o constitui pode funcionar per si, ou em conjunto com os restantes. Para o efeito existe uma rede de comunica¸c˜ao entre todos os m´odulos do sistema. A introdu¸c˜ao de novas funcionalidades no sistema ´e, assim, reduzida `a simples opera¸c˜ao de introduzir um ou mais m´odulos. Este procedimento n˜ao depende portanto do funcionamento anterior do sistema.
Como se pode ver na figura 4.2, o sistema disp˜oe de v´arias interfaces homem-m´aquina para comunicar com o exterior, as quais podem funcionar em simultˆaneo. Do ponto de vista das funcionalidades, o sistema pode receber comandos provenientes de v´arias interfaces distintas, HMI’s ou n˜ao (por exemplo pode-se activar um comando remotamente). Do ponto de vista de configura¸c˜ao ´e poss´ıvel inquirir o sistema para obter a identifica¸c˜ao dos m´odulos instalados e ´e poss´ıvel configur´a-los remotamente.
Figura 4.1: Arquitectura do sistema B-Live
Figura 4.2: Interac¸c˜ao do sistema B-Live com o exterior
4.2.1 Arquitectura dos m´odulos
Como foi referido na sec¸c˜ao anterior o sistema B-Live ´e composto por m´odulos. As Figuras 4.3 e 4.4 representam a arquitectura de cada um dos m´odulos.
Figura 4.3: Arquitectura dos m´odulos B-Live
Cada m´odulo tem duas entradas convencionais, para actuadores manuais como interrup-tores, e quatro sa´ıdas, para actuar sobre os diferentes dispositivos que est˜ao a ser controlados pelo m´odulo. Os m´odulos podem tamb´em receber e/ou enviar comandos atrav´es de um barramento.
A customiza¸c˜ao dos m´odulos depende apenas da placa de potˆencia ou adapta¸c˜ao especi-alizada.
Figura 4.4: Arquitectura interna dos m´odulos B-Live
4.3
Protocolo de comunica¸c˜
oes
Como foi referido na arquitectura do sistema B-Live, existe uma rede de comunica¸c˜ao que interliga todos os m´odulos. Presentemente, essa rede ´e constitu´ıda pelo fieldbus Controller Area Network [12] (CAN). Este protocolo foi desenvolvido pela Bosch na d´ecada de 80 e ´e largamente utilizado na ind´ustria autom´ovel.
Nesta sec¸c˜ao ser´a descrito o protocolo de comunica¸c˜ao existente no sistema B-Live. Apresenta-se tamb´em a estrutura de dados e mensagens trocadas pelos m´odulos bem como o Apresenta-seu signi-ficado.
4.3.1 Estrutura de dados
O sistema dom´otico B-Live permite que os diversos m´odulos que o constituem troquem in-forma¸c˜ao entre si. Para o efeito ´e necess´ario que a inin-forma¸c˜ao esteja organizada, pelo que foi criada uma estrutura de dados espec´ıfica (4.5).
A estrutura de dados utilizada tem os seguintes campos:
IDMsg - Identifica (internamente ao m´odulo) a proveniˆencia ou o destino da mensagem (8 bit).
IDSrc - Identifica o produtor da mensagem (11 bit).
L - Tamanho do campo de dados (8 bit).
Dados - Campo de dados (array de bytes).
No software existe uma colec¸c˜ao de estruturas deste tipo armazenadas em FIFOs.
4.3.2 Estrutura das mensagens
Os m´odulos que constituem o B-Live podem trocar informa¸c˜ao entre si utilizando v´arios suportes de comunica¸c˜ao, correntemente CAN ou Linha S´erie.
Figura 4.5: Estrutura de dados B-Live
Por consequˆencia, existem diferentes estruturas de dados (FIFO, CAN e Linha S´erie) de acordo com o suporte de comunica¸c˜ao utilizado.
FIFO
As camadas de software utilizam um FIFO para comunicar entre si. A estrutura das mensa-gens ´e a representada na Figura 4.6.
Figura 4.6: Estrutura das mensagens do FIFO
O significado dos campos ´e o referido na sec¸c˜ao 4.3.1.
Linha Serie
A Figura 4.7 representa a estrutura das mensagens trocadas pela Linha S´erie.
Figura 4.7: Estrutura das mensagens RS232
Cada um dos campos da mensagem tem 8 bits. O significado dos campos ´e o seguinte:
% - Inicializador da mensagem.
IDSrcH - Identifica¸c˜ao do m´odulo (3 bits mais significativos encostados `a direita).
IDSrcL - Identifica¸c˜ao do m´odulo.
L - Tamanho do campo de dados.
CRC - Checksum.
# - Terminador da mensagem. CAN
Quanto `as tramas trocadas por CAN, estas tˆem a estrutura da Figura 4.8.
Figura 4.8: Estrutura das tramas CAN
O significado dos campos ´e o seguinte:
IDSrc - Identifica¸c˜ao do m´odulo produtor.
L - Tamanho do campo de dados.
D0-D7 - Dados da trama.
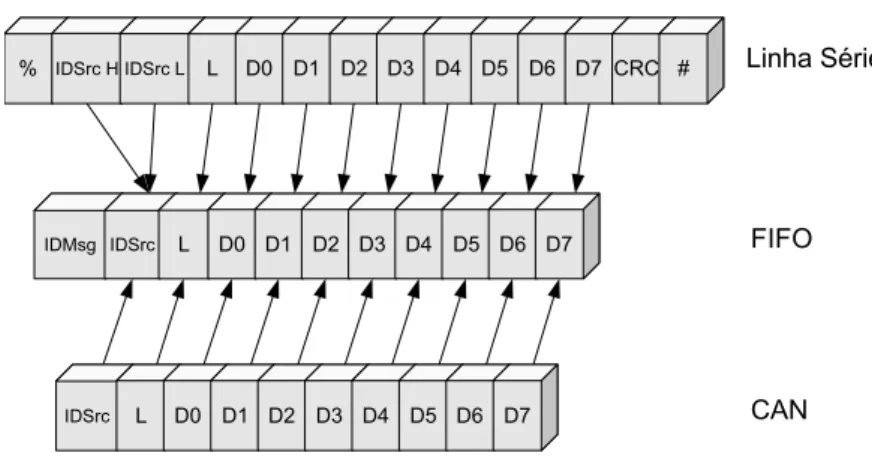
Correspondˆencia entre as diversas estruturas
A Figura 4.9 mostra as correspondˆencias entre os diversos campos das diferentes estruturas.
Significado dos campos das mensagens
Da an´alise das Figuras 4.6, 4.7, 4.8 e 4.9 observa-se que existem campos que s˜ao comuns a todas as estruturas e campos que variam consoante o tipo de estrutura.
Figura 4.9: Correspondˆencia entre mensagens
L - Tamanho do campos de dados.
D0 - Tipo de comando (Configura¸c˜ao, Modifica¸c˜ao, Opera¸c˜ao ou Debug).
D1 - Tipo de m´odulos (quando o comando enviado em D0 ´e para altera¸c˜ao do estado de um dispositivo, neste campo encontra-se o identificador desse dispositivo).
D2 a D7 - Identificador dos dispositivos a controlar (quando o comando enviado em D0 ´e para altera¸c˜ao do estado os campos D2 e D3 contˆem, respectivamente, o estado do dispositivo quando o evento foi gerado e o identificador do actuador no m´odulo). O campo IDMsg apenas est´a presente nas mensagens do FIFO:
IDMsg - Identifica a proveniˆencia da mensagem, Linha S´erie, CAN ou Dispositivo ac-tuador.
O campo IDSrc est´a presente nas tramas CAN e nas mensagens da Linha S´erie e do FIFO. No entanto, a forma como este campo ´e constru´ıdo ´e diferente consoante o meio utilizado (Figura 4.10).
Figura 4.10: Constru¸c˜ao do campo IDSrc
No caso de uma trama CAN, o campo IDSrc corresponde ao identificador da mensagem. Numa mensagem FIFO, ´e uma vari´avel do tipo short, onde apenas s˜ao considerados os 11 bits menos significativos. Se a mensagem for do tipo Linha S´erie, s˜ao concatenados 2 bytes de dados.
O campo IDSrc ´e constitu´ıdo pelos valores NL (Node Location) e NN (Node Number). O primeiro ´e um identificador que poder´a ser utilizado para identificar a divis˜ao da casa onde se encontra o m´odulo, ou para agrupar m´odulos. Deste modo podem definir-se 7 ´areas diferentes (o valor 0 ´e reservado). O segundo identifica o m´odulo dentro da divis˜ao ou grupo.
4.3.3 Tipos de mensagens
A informa¸c˜ao contida na estrutura de dados B-Live ´e utilizada para constru¸c˜ao das mensagens que s˜ao trocadas entre os m´odulos. Estas mensagens podem ser de 3 tipos: configura¸c˜ao, modifica¸c˜ao e opera¸c˜ao.
Em mensagens de configura¸c˜ao ou modifica¸c˜ao os campos de dados tˆem o seguinte signi-ficado:
Dados[0] - Comando.
Dados[1] - Tipo de m´odulo.
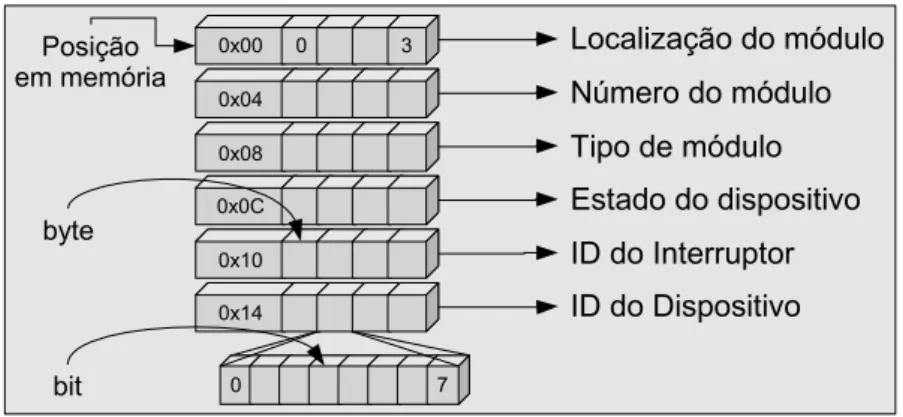
Dados[2] a Dados[5] - Identifica¸c˜ao dos dispositivos conforme o tipo de m´odulo. A informa¸c˜ao correspondente `a configura¸c˜ao dos m´odulos ´e guardada em mem´oria, se-gundo a disposi¸c˜ao representada na Figura 4.11.
Figura 4.11: Disposi¸c˜ao dos dados de configura¸c˜ao em mem´oria
S˜ao reservados 4 bytes para cada um dos diferentes campos de configura¸c˜ao, que podem ser todos utilizados ou n˜ao. No campo Estado do dispositivo pode ser guardado, se necess´ario, o estado de um determinado dispositivo.
Em mensagens de opera¸c˜ao os campos de dados tˆem o seguinte significado:
Dados[0] - Comando de opera¸c˜ao.
Dados[1] - Identificador do dispositivo.
Dados[2] - Estado do dispositivo quando o evento foi gerado (se necess´ario).
Dados[3] - Ordem do dispositivo no m´odulo (se necess´ario).
4.3.4 Comandos e seu significado
No sistema B-Live existem diversos comandos que permitem operar sobre os m´odulos e os dispositivos que lhes est˜ao associados.
Apresentam-se de seguida os comandos do sistema B-Live e o seu significado:
C - Configura¸c˜ao, permite configurar os m´odulos: n´umero e localiza¸c˜ao, tipo de dispo-sitivo a controlar, dispodispo-sitivos associados e suas configura¸c˜oes.
M - Modifica¸c˜ao, permite alterar/configurar os dispositivos controlados pelos m´odulos.
F - Fecho / Off, desactiva o dispositivo.
A - Altera¸c˜ao de estado, altera o estado actual de um dispositivo.
S - Leitura de estado, envia para a rede a configura¸c˜ao do m´odulo.
R - Resposta ao PC, envia para o m´odulo que faz a interface com o PC a configura¸c˜ao do m´odulo.
B - Comandos do menu recitado, comando espec´ıfico para o Menu Recitado (esta fun-cionalidade est´a especificada adiante neste texto).
D - Debug, permite verificar erros no c´odigo.
4.4
Identifica¸c˜
ao dos m´
odulos
Actualmente o sistema B-Live ´e composto pelos seguintes m´odulos:
Interface PC. Estores. Lˆampadas. Portas. Autoclismo. Dispensador de comida. Tomadas.
Sistema para disponibilizar Menu Recitado.
Interface PC
O m´odulo interface PC permite interligar o sistema B-Live com um computador (Figura 4.12). Assim, ´e poss´ıvel efectuar a troca de informa¸c˜ao entre um sistema computacional e o sistema B-Live.
Estores
Este m´odulo permite o controlo de um estore el´ectrico, nomeadamente as opera¸c˜oes de aber-tura e fecho (Figura 4.13). O m´odulo pode ser operado utilizando um interruptor convencional local (interruptores ligados fisicamente ao m´odulo) ou por interruptores remotos associados ao m´odulo.
Figura 4.12: M´odulo B-Live Placa de Controlo
Figura 4.13: M´odulo B-Live Estores
Lˆampadas
O m´odulo de lˆampadas permite o controlo de duas lˆampadas, nomeadamente as opera¸c˜oes ligar e desligar (Figura 4.14). O m´odulo pode ser operado utilizando dois interruptores convencionais locais ou por interruptores remotos associados ao m´odulo.
Figura 4.14: M´odulo B-Live Lˆampadas
Portas
O m´odulo de portas permite o controlo de uma porta, nomeadamente as opera¸c˜oes abrir e fechar. A arquitectura deste m´odulo ´e a mesma que no m´odulo de estores (Figura 4.13). Por motivos de seguran¸ca, o m´odulo apenas pode ser operado utilizando um interruptor convencional local.
Autoclismo
O m´odulo de autoclismo permite efectuar a descarga da ´agua do reservat´orio tanque. O m´odulo pode ser operado utilizando um interruptor sem contacto (infravermelhos).
Dispensador de comida
O m´odulo dispensador de comida permite disponibilizar at´e quatro produtos alimentares ou refrigerantes (Figura 4.15). Em conjunto com as interfaces do sistema B-Live e de um c´odigo de luzes presentes na zona superior do dispensador de comida, ´e poss´ıvel executar as opera¸c˜oes de abertura e fecho da gaveta do dispensador e seleccionar o produto.
Figura 4.15: M´odulo B-Live Dispensador
Tomadas
Este m´odulo permite o controlo de uma tomada (Figura 4.16). ´E poss´ıvel, deste modo, efectuar um controlo on/off dos equipamentos el´ectricos que se encontram ligados `as tomadas da habita¸c˜ao. O m´odulo pode ser operado utilizando um interruptor convencional local.
Figura 4.16: M´odulo B-Live Tomadas
M´odulo para disponibilizar Menu Recitado
Este m´odulo em conjunto com um sistema de colunas permite recitar as faixas de ´audio pr´e-gravadas no integrado de som. A informa¸c˜ao gravada nas faixas corresponde aos dispositivos existentes no sistema.
Todos estes m´odulos s˜ao pass´ıveis de ser operados por interfaces espec´ıficas e de acordo com a limita¸c˜oes dos utilizadores. Estas interfaces ser˜ao descritas com maior detalhe na sec¸c˜ao 4.7.
4.5
Esquemas e organiza¸c˜
ao das placas
Como ilustrado na Figura 4.4, os m´odulos B-Live s˜ao constitu´ıdos pela Placa de Controlo e Placa de Potˆencia ou Especialidade. Esta sec¸c˜ao pretende fazer uma descri¸c˜ao funcional de cada uma das placas.
Placa de Controlo
A placa de controlo ´e o cora¸c˜ao dos m´odulos B-Live. ´E respons´avel pelas comunica¸c˜oes entre os m´odulos, por todo o processamento necess´ario para ler os interruptores e actuar nos dispositivos.
Nesta placa est˜ao dispon´ıveis as seguintes liga¸c˜oes (Figura 4.17):
Figura 4.17: Placa de Controlo JP1 - Liga¸c˜ao `a placa de potˆencia ou especialidade.
JP2 - Alimenta¸c˜ao (12 VDC).
JP3 - Linha s´erie.
JP4 - Liga¸c˜ao para programador.
JP5 - CAN
JP6 - CAN
Placa de Potˆencia
Nesta sec¸c˜ao ser˜ao apresentadas as placas de potˆencia, respons´aveis pela liga¸c˜ao dos disposi-tivos `a placa de controlo.
Placa BTA26
Esta placa ´e utilizada nos m´odulos de controlo de tomadas, e permite a liga¸c˜ao de uma ´unica tomada.
Os trˆes conectores nela existentes tˆem as seguintes fun¸c˜oes (Figura 4.18):
Figura 4.18: Placa de BTA26 C1 - Liga¸c˜ao `a placa de controlo.
P1 - Entrada de potˆencia (230 VAC).
P2 - Sa´ıda de potˆencia. Placa BT139
A placa de potˆencia BT139 ´e utilizada nos m´odulos de ilumina¸c˜ao, e permite a liga¸c˜ao de dois interruptores e duas lˆampadas.
A placa tem seis conectores, com as seguintes fun¸c˜oes (Figura 4.19):
C1 - Liga¸c˜ao `a placa de controlo.
S1 - Liga¸c˜ao a um interruptor.
S2 - Liga¸c˜ao a um interruptor.
Figura 4.19: Placa de BT139 L2 - Sa´ıda para uma lˆampada.
P1 - Entrada de potˆencia (230 VAC). Placa de MOSFETs
Esta placa ´e utilizada em dispositivos de baixo consumo, como por exemplo, electrov´alvulas. As liga¸c˜oes nela dispon´ıveis s˜ao (Figura 4.20):
Figura 4.20: Placa de MOSFETs C1 - Liga¸c˜ao `a placa de controlo.
S2 - Liga¸c˜ao a um interruptor. M1 - Sa´ıda 1 (0 ou 12 VDC). M2 - Sa´ıda 2 (0 ou 12 VDC). M3 - Sa´ıda 3 (0 ou 12 VDC). M4 - Sa´ıda 4 (0 ou 12 VDC). VCC - Alimenta¸c˜ao (12 VDC). GND - Massa. Placa de Rel´es
Utiliza-se esta placa nos m´odulos de controlo das portas e dos estores. Na placa podem-se encontrar as seguintes liga¸c˜oes (Figura 4.21):
Figura 4.21: Placa de Rel´es C1 - Liga¸c˜ao `a placa de controlo.
S1 - Liga¸c˜ao a um interruptor. S2 - Liga¸c˜ao a um interruptor. R1 - Sa´ıda 1 (0 ou 5 VDC). R2 - Sa´ıda 2 (0 ou 5 VDC). R3 - Sa´ıda 3 (0 ou 5 VDC). R4 - Sa´ıda 4 (0 ou 5 VDC). VCC - Alimenta¸c˜ao (12 VDC).
Placa do Menu Recitado
Esta placa ´e utilizada no m´odulo Menu Reciado. A sua fun¸c˜ao ´e disponibilizar a sa´ıda de ´audio e recolher os sinais dos interruptores.
Na placa podem-se encontrar as seguintes liga¸c˜oes (Figura 4.22):
Figura 4.22: Placa de Menu Recitado C1 - Liga¸c˜ao `a placa de controlo.
S1 - Liga¸c˜ao a um interruptor.
S2 - Liga¸c˜ao a um interruptor.
J1 - Sa´ıda de ´audio para as colunas.
J1 - Entrada de ´audio para grava¸c˜ao.
4.6
Software B-Live
O software B-Live ´e comum a todos os m´odulos. As funcionalidades que cada m´odulo adquire s˜ao definidas posteriormente atrav´es do processo de configura¸c˜ao.
Na sec¸c˜ao seguinte ser´a efectuada uma descri¸c˜ao da arquitectura do software B-Live.
4.6.1 Arquitectura do software
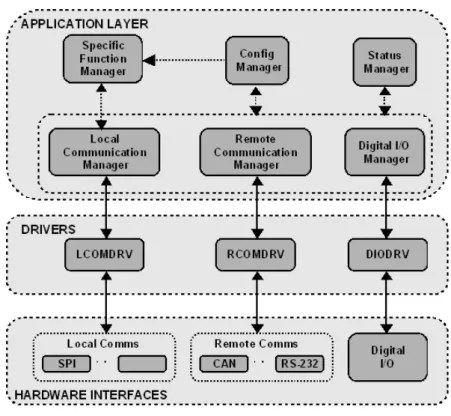
A arquitectura do software dos m´odulos B-Live encontra-se dividida em trˆes componentes (Figura 4.23): Application, Drivers e Hardware Interfaces. Dependendo das funcionalidades dos m´odulos podem existir diferentes drivers que estabelecem a liga¸c˜ao entre as componen-tes Application e Hardware Interfaces. A Application executa diferencomponen-tes gestores de modo a executar diversas tarefas: armazenar a configura¸c˜ao (Config Manager ) e estados (Status
Manager ) dos m´odulos, definir as fun¸c˜oes espec´ıficas dos m´odulos (Specific Function Ma-nager ), gerir as comunica¸c˜oes locais (Local Communication MaMa-nager) e remotas (Remote Communication Manager) e as sa´ıdas/entradas digitais (Digital I/O Manager).
Figura 4.23: Arquitectura do software B-Live
O motivo que levou `a escolha desta arquitectura deve-se ao facto de os m´odulos poderem utilizar v´arios protocolos de comunica¸c˜ao locais (SPI, I2C, etc.) e remotos (CAN, ZigBee, Ethernet, etc.) em simultˆaneo. Deste modo, um driver (LCOMDRV) ´e respons´avel pela gest˜ao de todas as comunica¸c˜oes locais, enquanto o outro driver (RCOMDRV) faz a gest˜ao das comunica¸c˜oes remotas. Esta op¸c˜ao comparando com a utiliza¸c˜ao um driver para cada um dos protocolos de comunica¸c˜ao, permite reduzir a complexidade da camada de drivers e simplifica a coordena¸c˜ao entre as comunica¸c˜oes locais ou remotas. Deste modo ´e poss´ıvel escalonar comunica¸c˜oes locais e remotas de acordo com os parˆametros especificados pelo utilizador/aplica¸c˜ao (por exemplo, prioridade).
4.7
Opera¸c˜
ao do sistema B-Live
Um dos aspectos mais importantes no desenvolvimento de sistemas de dom´otica para pessoas com limita¸c˜oes funcionais s˜ao as Interfaces Homem-M´aquina (HMIs) [13]. De facto, n˜ao basta desenvolver sistemas de baixo custo, robustos, fi´aveis e com diversas funcionalidades; ´e necess´ario que o utilizador final disponha de interfaces intuitivas e de f´acil utiliza¸c˜ao para operar sobre os sistemas [14] e [15].
Uma das principais caracter´ısticas do B-Live ´e a modularidade e facilidade de adapta¸c˜ao `as necessidades dos utilizadores.
Tendo em conta as necessidades espec´ıficas de cada utilizador podem ser utilizadas v´arias interfaces para interagir com o B-Live. Actualmente, as interfaces dispon´ıveis para o sistema B-Live s˜ao as seguintes:
Computador.
Telem´ovel.
Interface feita por medida.
Interruptores de boca (IntegraMouse e IntegraSwitch [16]).
Interruptores convencionais.
PC
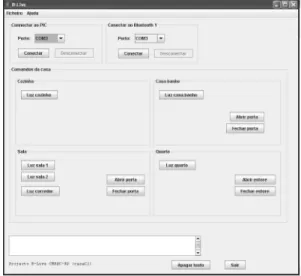
Quando existe um computador, este pode ser utilizado para operar sobre o B-Live, utilizando uma interface adequada para o efeito (Figura 4.24).
Figura 4.24: Interface B-Live PC
A utiliza¸c˜ao desta interface ´e bastante simples. Para actuar sobre os diversos dispositivos basta seleccionar o bot˜ao correspondente ao dispositivo e respectiva opera¸c˜ao.
Telem´ovel
No telem´ovel existe uma aplica¸c˜ao em forma de menu, a partir da qual se pode controlar o B-Live.
Interface feita por medida
Os utilizadores que apresentem graves limita¸c˜oes, impeditivas de utilizar o telem´ovel ou o computador, podem recorrer a interfaces feitas por medida. A interface da cadeira
enquadra-se neste contexto (Figura 4.25).
Figura 4.25: Interface cadeira
A Interface da cadeira n˜ao ´e mais que um interruptor de alta sensibilidade com comu-nica¸c˜ao por r´adio frequˆencia, o qual est´a pensado para ser utilizado por pessoas com mobili-dade bastante reduzida.
IntegraMouse e IntegraSwitch
O IntegraMouse e o IntegraSwitch (Figura 4.26) s˜ao interfaces Homem-m´aquina, para pessoas com graves limita¸c˜oes funcionais.
O IntegraMouse apresenta as mesmas funcionalidades que um rato para computador con-vencional. A principal diferen¸ca ´e que este ´e operado atrav´es da boca, l´abios para o movimento e sopro para simular os bot˜oes. O utilizador com limita¸c˜oes pode recorrer ao IntegraMouse para operar o menu do computador referido anteriormente.
Figura 4.26: Interface interruptor e rato de boca
Quando as limita¸c˜oes dos utilizadores n˜ao permitem o recurso `a interface da cadeira, o IntegraSwitch pode ser utilizado em substitui¸c˜ao. O sentido do ar (Expira¸c˜ao ou Inspira¸c˜ao) no IntegraSwitch simula os bot˜oes da interface da cadeira. A associa¸c˜ao entre o sentido do ar e o interruptor da interface da cadeira pode ser escolhido pelo utilizador. Para tal basta fazer a liga¸c˜ao entre o IntegraSwitch e o emissor RF de forma conveniente.
Interruptores convencionais
Os utilizadores com menor grau de limita¸c˜ao ou os acompanhantes dos pacientes podem utilizar os interruptores convencionais para interagir com o B-Live (Figura 4.27).
Figura 4.27: Interruptores convencionais
4.8
Conclus˜
ao
Neste cap´ıtulo foi apresentando o B-Live, um sistema de dom´otica para pessoas com limita¸c˜oes funcionais, de baixo custo, descentralizado e que utiliza t´ecnicas de retrofitting. Foram des-critos a arquitectura do sistema, o protocolo de comunica¸c˜ao, a arquitectura do software e as m´ultiplas HMIs.
O barramento de comunica¸c˜ao que interliga os m´odulos do sistema ´e baseado numa solu¸c˜ao cablada. Nos cap´ıtulos seguintes ser˜ao discutidas alternativas a esta solu¸c˜ao, nomeadamente outras solu¸c˜oes cabladas (Power Line) e solu¸c˜oes sem fios (Bluetooth, Wi-Fi, Ultra Wide-Band e ZigBee).
Cap´ıtulo 5
An´
alise de solu¸c˜
oes de comunica¸c˜
ao
alternativas
5.1
Introdu¸c˜
ao
Neste cap´ıtulo ser´a efectuado um estudo sobre solu¸c˜oes alternativas ao barramento de co-munica¸c˜oes presente no sistema de dom´otica B-Live. Ser´a analisado o protocolo Power Line Communications que opera sobre a rede el´ectrica, nomeadamente a arquitectura protocolar, alguns protocolos que se baseiam neste meio de comunica¸c˜ao e os inconvenientes da utiliza¸c˜ao desta tecnologia. No final do cap´ıtulo ser´a efectuado um estudo comparativo entre solu¸c˜oes cabladas e solu¸c˜oes sem fios. Ser´a dada especial ˆenfase `a problem´atica da utiliza¸c˜ao das tecnologias sem fios.
5.2
Power Line Communications (PLC)
O termo Broadband over Power Lines (BPL), tamb´em conhecido como Power Line Commu-nications (PLC), ´e utilizado para descrever a utiliza¸c˜ao das linhas el´ectricas como o meio de suporte `as redes de comunica¸c˜ao de alta velocidade. A utiliza¸c˜ao das linhas el´ectricas nas comunica¸c˜oes, n˜ao ´e uma ideia recente. Tradicionalmente, o termo power-line carrier tem sido utilizado para referir a utiliza¸c˜ao das linhas el´ectricas como um meio de comunica¸c˜ao [17].
As companhias el´ectricas aplicaram tecnologias como Supervisory Control and Data Acqui-sition (SCADA) [18] nas linhas de corrente el´ectrica, de forma a enviar comandos de controlo para esta¸c˜oes remotas ou sub-esta¸c˜oes. Os respons´aveis pela manuten¸c˜ao das linhas el´ectricas utilizavam dispositivos de r´adio que serviam como meio de comunica¸c˜ao entre si. Nos edif´ıcios, h´a v´arios anos que existem sistemas de intercomunicador que fazem uso das linhas el´ectricas para proceder `a transmiss˜ao de dados ´audio. Nas residˆencias, existem sistemas que, quando aplicados `as tomadas, permitem efectuar um controlo on/off temporal dos dispositivos que se encontram ligados `a rede el´ectrica [19].
de modo a fornecer comunica¸c˜oes de banda larga de alto d´ebito. Para atingir este fim, a tecnologia BPL opera em frequˆencias mais elevadas que as comunica¸c˜oes PLC tradicionais (tipicamente entre os 2 e 80 MHz). A Federal Communications Commission (FCC) [20] considera a tecnologia BPL uma forma de fazer chegar as comunica¸c˜oes de banda larga `as zonas remotas/rurais, onde os custos de cria¸c˜ao de infraestruturas e instala¸c˜ao de liga¸c˜oes por cabo ou DSL s˜ao muito elevados. Entre 1996 e 2004 foram efectuados diversos estudos com o intuito de analisar as potencialidades da tecnologia BPL [21].
Reconhecendo o potencial da tecnologia BPL, em Julho de 2004, o IEEE come¸cou a tra-balhar na especifica¸c˜ao P1675 Standard for Broadband over Power Line Hardware [22]. O objectivo da especifica¸c˜ao era ”desenvolver um padr˜ao de instala¸c˜ao do hardware necess´ario nas linhas de distribui¸c˜ao”e ”definir as normas de seguran¸ca da instala¸c˜ao do equipamento BPL”. Em Julho de 2005, o IEEE iniciou o trabalho na especifica¸c˜ao P1901 Standard for Broadband over Power Line Networks: Medium Access Control and Physical Layer Specifi-cation [23]. O objectivo desta especifica¸c˜ao era ”criar um canal BPL equilibrado e eficiente, cuja largura de banda e qualidade do servi¸co fosse a adequada para todos os utilizadores”.
5.2.1 Descri¸c˜ao geral
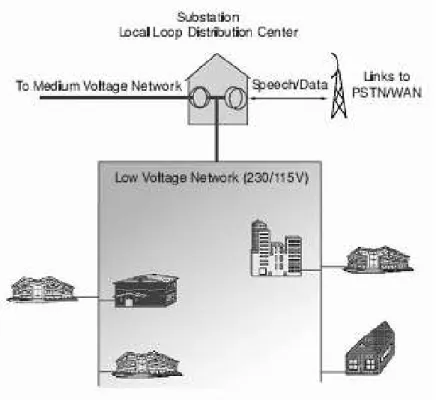
O mercado PLC pode ser dividido em dois segmentos: as comunica¸c˜oes de banda larga para as habita¸c˜oes - last mile (Figura 5.1 [24]) e as comunica¸c˜oes dentro das habita¸c˜oes - last inch (Figura 5.2 [24]).
Figura 5.1: Acesso da banda larga PLC
modems por cabo, xDSL (Digital Subscriber Lines) e comunica¸c˜oes sem fios de elevada largura de banda. Nesta perspectiva, a grande vantagem das comunica¸c˜oes PLC ´e a utiliza¸c˜ao dos cabos de corrente el´ectrica como meio de transmiss˜ao de dados. Como este meio j´a se encontra implantado, n˜ao ´e necess´ario criar infraestruturas alternativas, o que implica uma redu¸c˜ao de custos. Deste modo, este deve ser o meio preferencial para fornecer comunica¸c˜oes de largura de banda elevada em meios rurais ou remotos, onde o telefone e as liga¸c˜oes por cabo n˜ao existem.
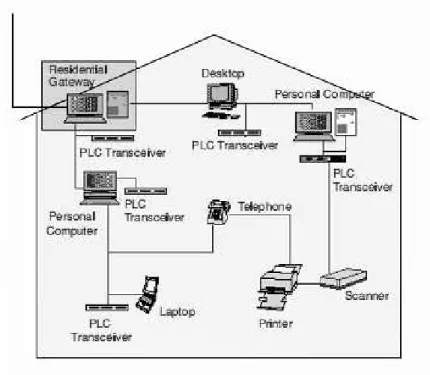
Figura 5.2: Rede dom´otica PLC
O acesso last inch compreende um vasto conjunto de equipamentos el´ectricos conectados no interior das habita¸c˜oes por uma rede interna (in-home). Esta rede pode transformar todas as tomadas el´ectricas da habita¸c˜ao em liga¸c˜oes de banda larga para computadores pessoais, telefones e seus acess´orios, bem como para outros dispositivos electr´onicos.
Em Mar¸co de 2000, um grupo de empresas formou a alian¸ca HomePlug Powerline [25]. Na medida em que a maior parte dos dispositivos electr´onicos utilizam as tomadas el´ectricas para receber energia, o objectivo da alian¸ca foi criar uma forma de utilizar as mesmas tomadas e fios el´ectricos, para ligar os dispositivos entre si e a Internet. A alian¸ca atingiu este objectivo analisando diversas tecnologias, que culminou na cria¸c˜ao da especifica¸c˜ao HomePlug 1.0 em Junho de 2001.
5.2.2 Arquitectura
Um dos aspectos a ser considerado na tecnologia PLC ´e a diferente certifica¸c˜ao de acordo com a zona do Mundo onde a tecnologia ´e utilizada. Os aspectos mais importantes definidos pelas especifica¸c˜oes s˜ao a potˆencia m´axima de transmiss˜ao e a largura de banda permitida.
Estas restri¸c˜oes s˜ao impostas de forma a limitar a interferˆencia de outros servi¸cos de teleco-munica¸c˜oes e uma medida para, no futuro, evitar a contamina¸c˜ao do espectro de frequˆencias.
(a) (b)
Figura 5.3: Espectro de frequˆencias da tecnologia PLC
A especifica¸c˜ao Europeia CENELEC EN 50065-01 [26] define limita¸c˜oes muito rigorosas e uma largura de banda reduzida nas comunica¸c˜oes PLC. Na Europa, esta tecnologia apenas pode operar na banda do espectro de frequˆencias de 95 a 150 KHz (Figura 5.3 (a)) enquanto que no Norte da Am´erica o espectro ´e maior (540 KHz) (Figura 5.3 (b)).
Camada F´ısica (PHY)
V´arias t´ecnicas de modula¸c˜ao como Frequency Shift Keying (FSK), Code Division Multiple Access (CDMA) ou Orthogonal Frequency Division Multiplexing (OFDM), foram propostas como esquemas de modula¸c˜ao apropriados para a tecnologia PLC. Em aplica¸c˜oes com baixas taxas de transmiss˜ao e baixo custo, como protec¸c˜ao das linhas el´ectricas ou telemetria, a modula¸c˜ao FSK ´e vista como uma boa solu¸c˜ao. Para taxas de transmiss˜ao na ordem de 1 Mbps, a t´ecnica CDMA ´e uma solu¸c˜ao eficiente. No entanto, para elevadas taxas de trans-miss˜ao, a modula¸c˜ao mais adequada ´e a OFMD, na medida em que esta t´ecnica elimina alguns problemas presentes nas outras modula¸c˜oes (Intersysmbol Interference (ISI) e Fading [24]).
Camada de Controlo de Acesso ao Meio (MAC)
V´arios protocolos de controlo de acesso ao meio tˆem sido propostos para a tecnologia PLC: Carrier Sense Multiple Access (CSMA), Collision Detection (CSMA/CD) e Collision Avoi-dance (CSMA/CA).
As principais vantagens do protocolo CSMA s˜ao o baixo custo de implementa¸c˜ao e a eficiˆencia na transmiss˜ao de tr´afego de baixa/m´edia carga. No entanto, para cargas mais elevadas, este protocolo n˜ao ´e o mais eficiente. Uma solu¸c˜ao melhor seria a utiliza¸c˜ao do pro-tocolo CSMA/CD. Neste propro-tocolo, depois de uma transmiss˜ao, o canal ´e escutado de forma a verificar se ocorreu alguma colis˜ao. Caso tenha ocorrido, aguarda-se um determinado tempo at´e se proceder `a retransmiss˜ao da informa¸c˜ao. Na tecnologia PLC, a grande varia¸c˜ao do sinal recebido e os n´ıveis de ru´ıdo tornam a utiliza¸c˜ao deste protocolo dif´ıcil e pouco fi´avel. Uma alternativa ao m´etodo anterior ´e a utiliza¸c˜ao do protocolo CSMA/CA. Neste m´etodo, antes de ser efectuada uma transmiss˜ao, cada n´o sinaliza aos restantes a sua inten¸c˜ao de iniciar uma transmiss˜ao. Embora este m´etodo necessite de um overhead superior, globalmente, as taxas de transmiss˜ao s˜ao superiores na medida em que s˜ao necess´arias menos retransmiss˜oes. O