CAPÍTULO I
ANÁLISE DAS TENSÕES
1.1. RESUMO DA TEORIA
1.1.1. Introdução. O Conceito de Tensão
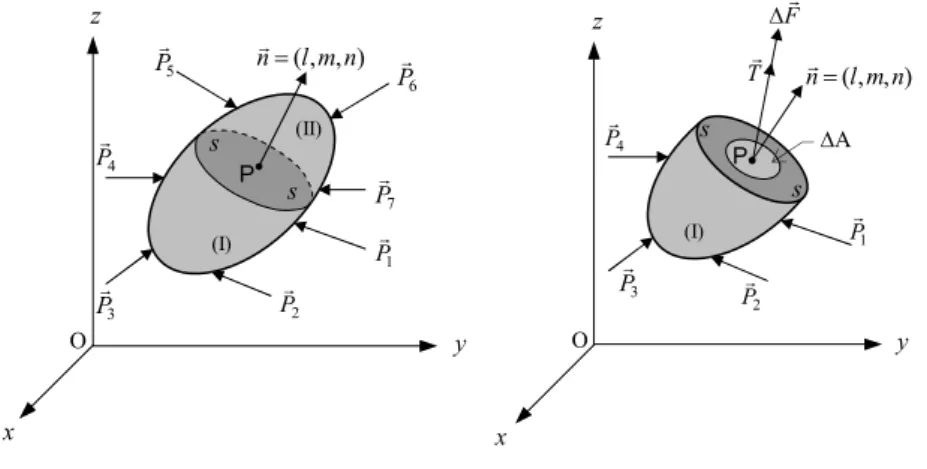
Há, fundamentalmente, dois tipos distintos de forças exteriores que
podem actuar sobre um corpo material: (i)-forças de superfície e
(ii)-forças de volume. Considere-se o corpo (C) em equilíbrio sob a acção
destes dois tipos de forças, Fig. 1.1:
A Tensão Resultante
T
( n
P
,
r
)
r
, no ponto P, para uma superfície de corte
perpendicular a n
r
=(l, m, n), define-se pela expressão (Fig. 1.2):
A
F
lim
T
∆A∆
∆
=
→r
r
0(1.1)
Fig. 1.1 – Corpo em equilíbrio ) , , (lmn n =r 6 P r 1 Pr 2 P r 3 P r 5 P r z x y (I) O 7 P r 4 Pr (II) s P s
Fig. 1.2 – Tensão resultante no ponto P Fr ∆ ) , , (lmn n =r 4 P r 3 P r 2 Pr 1 P r A ∆ x y z O (I) s s P Tr
Em geral, o vector tensão resultante
)
,
P
( n
T
r
r
tem uma direcção distinta
da normal n
r
e poderá decompor-se
segundo duas direcções ortogonais,
conforme ilustrado na Fig.1.3:
Uma componente perpendicular ao
plano de corte, designada por
tensão normal e representada por
σ
;
e uma segunda componente no
plano de corte, designada por
tensão tangencial ou tensão de
corte, representada por
τ
.
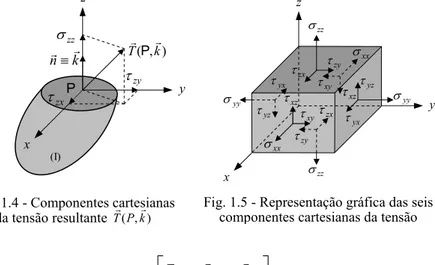
1.1.2. Componentes Cartesianas da Tensão
Em cada ponto P(x,y,z), é possível definir um conjunto de nove
componentes cartesianas do estado de tensão nesse ponto, Fig.1.4 e
Fig.1.5, que podem ser agrupadas numa matriz quadrada sob a forma
seguinte:
[ ]
=
zz zy zx yz yy yx xz xy xxσ
τ
τ
τ
σ
τ
τ
τ
σ
τ
(1.2)
Fig. 1.5 - Representação gráfica das seis componentes cartesianas da tensão Fig. 1.4 - Componentes cartesianas
da tensão resultante T(P,k) r r zz σ k n r r ≡ T( ,k) r r P zy τ zx
τ
y z (I) x P zz σ yy σ σyy zz σ xx σ xx σ yx τ yx τ xz τ τxz yz τ yz τ zx τ zx τ xy τ xy τ zy τ zy τ x y z Fig. 1.3 - Decomposição do vector tensão resultanteT
r
σ
r
(I)τ
r
s
s
P
n
r
A matriz das tensões [
τ
] é simétrica relativamente à diagonal principal,
isto é,
τ
yx =τ
xy ,τ
zy =τ
yz eτ
zx=
τ
xz. Em alternativa, é possível representaras seis componentes independentes da tensão pelo chamado vector das
tensões {σ
σ
σ
σ}, definido pela seguinte expressão:
σ
σ
σ
σ = {σ
σ
σ
σ}=
xy xz yz zz yy xxτ
τ
τ
σ
σ
σ
(1.3)
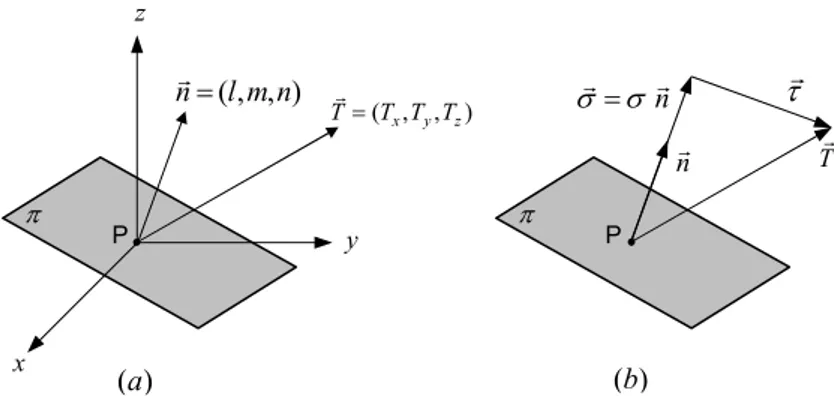
1.1.3. Tensão para uma Orientação Arbitrária
Em cada ponto P(x,y,z) dum corpo material, a intensidade e a direcção do
vector tensão resultante T
r
dependem da orientação do plano de corte (
π
)
que se considera, Fig. 1.6(a):
zz zy zx z yz yy yx y xz xy xx x
n
m
l
T
n
m
l
T
n
m
l
T
σ
τ
τ
τ
σ
τ
τ
τ
σ
+
+
=
+
+
=
+
+
=
(1.4a)
ou, sob a forma matricial:
Fig. 1.6 – Tensão resultante para um plano de orientação arbitrária ) , , (lmn n =r z x y P π ) , , (TxTyTz T =r P π nr Tr nr r σ σ=
τ
r
(a) (b)
=
n
m
l
T
T
T
zz zy zx yz yy yx xz xy xx z y xσ
τ
τ
τ
σ
τ
τ
τ
σ
(1.4b)
As componentes normal (
σ
) e tangencial (
τ
) da tensão em P são dadas,
respectivamente, pelas expressões seguintes:
nl
mn
lm
n
m
l
yy zz xy yz zx xxσ
σ
τ
τ
τ
σ
σ
=
2+
2+
2+
2
+
2
+
2
(1.5)
e
2 2 2 2 2σ
τ
=
T
x+
T
y+
T
z−
(1.6)
A direcção da tensão de corte
τ
no plano
π
,
n =rc (lc,mc,nc), fica definida
pelos respectivos co-senos directores:
τ
σ
τ
σ
τ
σ
/
)
(
/
)
(
/
)
(
n
T
n
m
T
m
l
T
l
z c y c x c−
=
−
=
−
=
(1.7)
1.1.4. Equações de Equilíbrio
As seis funções que definem o campo das tensões estão ligadas entre si
por três equações diferenciais:
=
+
∂
∂
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
+
∂
∂
0
0
0
z zz yz xz y zy yy xy x zx yx xxF
z
y
x
F
z
y
x
F
z
y
x
σ
τ
τ
σ
σ
τ
τ
τ
σ
(1.8)
Estas são as chamadas equações de equilíbrio da teoria da elasticidade
ou equações de equilíbrio das tensões em coordenadas cartesianas.
Além das equações de equilíbrio, verifica-se também que as
componentes de corte em cada ponto são iguais duas a duas, isto é:
xz zx yz zy xy yx
τ
τ
τ
τ
τ
τ
=
=
=
(1.9)
A simetria das tensões tangenciais expressa pelas equações (1.9) implica
uma lei de reciprocidade mais geral, que se pode exprimir através da
seguinte equação vectorial:
n
n
T
n
n
T
r
r
r
r
r
r
|
)
'
,
P
(
'
|
)
,
P
(
=
(1.10)
Este resultado traduz a denominada lei da reciprocidade das tensões ou
Teorema de Cauchy.
1.1.5. Leis de Transformação das Tensões
Por aplicação das equações (1.4),
podem calcular-se as componentes
cartesianas da tensão referidas a um
referencial particular Ox’y’z’, Fig.1.7,
em
função
das
componentes
cartesianas da tensão no referencial
global Oxyz e dos co-senos directores
que definem a posição relativa dos
dois referenciais:
)
(
)
(
)
(
)
(
)
(
)
(
(1.11)
)
(
)
(
)
(
2
2
2
2
2
2
2
2
2
' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' 2 ' 2 ' 2 ' ' ' ' ' ' ' ' ' 2 ' 2 ' 2 ' ' ' ' ' ' ' ' ' 2 ' 2 ' 2 ' ' ' y x y x xy y x y x xz y x y x yz y x zz y x yy y x xx x z x z xy x z x z xz x z x z yz x z zz x z yy x z xx y x z x z y z y xy z y z y xz z y z y yz z y zz z y yy z y xx z y z z xy z z xz z z yz z zz z yy z xx z z y y xy y y xz y y yz y zz y yy y xx y y x x xy x x xz x x yz x zz x yy x xx x xl
m
m
l
n
l
l
n
m
n
n
m
n
n
m
m
l
l
l
m
m
l
n
l
l
n
m
n
n
m
n
n
m
m
l
l
l
m
m
l
n
l
l
n
m
n
n
m
n
n
m
m
l
l
m
l
l
n
n
m
n
m
l
m
l
l
n
n
m
n
m
l
m
l
l
n
n
m
n
m
l
+
+
+
+
+
+
+
+
=
+
+
+
+
+
+
+
+
=
+
+
+
+
+
+
+
+
=
+
+
+
+
+
=
+
+
+
+
+
=
+
+
+
+
+
=
τ
τ
τ
σ
σ
σ
τ
τ
τ
σ
σ
σ
τ
τ
τ
τ
τ
σ
σ
σ
τ
τ
τ
τ
σ
σ
σ
σ
τ
τ
τ
σ
σ
σ
σ
τ
τ
τ
σ
σ
σ
σ
ou, inversamente:
Fig. 1.7– Referenciais Oxyz e Ox’y’z’ O=O' x x' y' y z' z
)
(
)
(
)
(
)
(
)
(
)
(
)
12
.
1
(
)
(
)
(
)
(
2
2
2
2
2
2
2
2
2
' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' 2 ' ' ' 2 ' ' ' 2 ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' 2 ' ' ' 2 ' ' ' 2 ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' 2 ' ' ' 2 ' ' ' 2 ' ' ' x y y x y x z x x z y x y z z y z y z z z z y y y y x x x x x y y x y x z x x z z x y z z y z y z z z z y y y y x x x x xy xz x y y x y x z x x z z x y z z y z y z z z z y y y y x x x x yz y x y x x z z x z y z y z z z y y y x x x zz y x y x x z z x z y z y z z z y y y x x x yy y x y x x z z x z y z y z z z y y y x x x xxm
l
m
l
m
l
m
l
m
l
m
l
m
l
m
l
m
l
l
n
l
n
l
n
l
n
l
n
l
n
l
n
l
n
l
n
n
m
n
m
n
m
n
m
n
m
n
m
n
l
n
m
n
m
n
n
n
n
n
n
n
n
n
m
m
m
m
m
m
m
m
m
l
l
l
l
l
l
l
l
l
+
+
+
+
+
+
+
+
=
+
+
+
+
+
+
+
+
=
+
+
+
+
+
+
+
+
=
+
+
+
+
+
=
+
+
+
+
+
=
+
+
+
+
+
=
τ
τ
τ
σ
σ
σ
τ
τ
τ
σ
σ
σ
τ
τ
τ
τ
τ
σ
σ
σ
τ
τ
τ
τ
σ
σ
σ
σ
τ
τ
τ
σ
σ
σ
σ
τ
τ
τ
σ
σ
σ
σ
Estas equações de transformação podem escrever-se de uma maneira
concentrada, sob a forma matricial seguinte:
[ ] [ ] [ ] [ ]
T'
L
ττττ
L
ττττ =
(1.13)
onde [L] é a matriz de transformação de coordenadas e [L]
Té a
respectiva matriz transposta.
Inversamente, pode escrever-se:
[ ] [ ] [ ] [ ]
ττττ =
L
Tττττ
'
L
(1.14)
Em alternativa, quando se utiliza a notação vectorial da tensão, as
equações de transformação das tensões escrevem-se:
xy xz yz zz yy xxτ
τ
τ
σ
σ
σ
= [T]
' ' ' ' ' ' ' ' ' ' ' ' y x z x z y z z y y x xτ
τ
τ
σ
σ
σ
(1.15a)
ou, simplesmente :
{σ
σ
σ
σ} = [T] {σ
σ
σ
σ’}
(1.15b)
onde:
[T] =
66 65 64 63 62 61 56 55 54 53 52 51 46 45 44 43 42 41 36 35 34 33 32 31 26 25 24 23 22 21 16 15 14 13 12 11T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
T
(1.16)
com:
2 ' 11l
xT
=
;
T =
12l
y2';
T
13=
l
z2';
T
14=
2
l
y'l
z';
T =15 2lz'lx';
T
16=
2
l
x'l
y';
2 ' 21m
xT
=
;
2 ' 22m
yT =
;
T
23=
m
2z';
T
24=
2
m
y'm
z';
T25=2mz'mx';
T
26=
2
m
x'm
y';
2 ' 31n
xT
=
;
2 ' 32n
yT =
;
T
33=
n
z2';
T
34=
2
n
y'n
z';
T35=2nz'nx';
T
36=
2
n
x'n
y';
T41=mx'nx';
' ' 42m
yn
yT
=
;
T43=lz'nz';
T
44=
m
y'n
z'+
m
z'n
y';
T45 =mz'nx'+mx'nz';
' ' ' ' 46m
xn
ym
yn
xT
=
+
;
T =51 lx'nx';
T
52=
l
y'n
y';
T53=lz'nz';
T
54=
n
y'l
z'+
n
z'l
y';
' ' ' ' 55 nzlx nxlz T = +;
T
56=
n
x'l
y'+
n
y'l
x';
T =61 lx'mx';
T
62=
l
y'm
y';
T63=lz'mz';
' ' ' ' 64l
ym
zl
zm
yT
=
+
;
T65 =lz'mx'+lx'mz';
T
66=
l
x'm
y'+
l
y'm
x'A matriz [T] definida pelos coeficientes (1.24d) é designada por matriz
de transformação das tensões.
Inversamente, pode escrever-se:
{σ
σ
σ
σ'} = [T]
-1{σ
σ
σ
σ} = [R] {σ
σ
σ}
σ
(1.17)
onde:
[R] =
66 65 64 63 62 61 56 55 54 53 52 51 46 45 44 43 42 41 36 35 34 33 32 31 26 25 24 23 22 21 16 15 14 13 12 11R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
(1.18)
com:
2 ' 11
l
xR
= ;
R
12=
m
x2';
R
13=
n
2x';
R14 =2mx'nx';
R15 =2nx'lx';
R16=2lx'mx';
2 ' 21l
yR =
;
R =
22m
2y';
R =
23n
2y'R
24=
2
m
y'n
y';
R
25=
2
n
y'l
y';
R
26=
2
l
y'm
y';
2 ' 31l
zR
= ;
R
32=
m
2z';
R
33=
n
z2';
R34 =2mz'nz';
R35 =2nz'lz';
R36 =2lz'mz';
' ' 41l
yl
zR
=
;
R
42=
m
y'm
z';
R
43=
n
y'n
z';
R
44=
m
y'n
z'+
n
y'm
z';
' ' ' ' 45n
yl
zly
xn
zR
=
+
;
R
46=
l
y'm
z'+
m
y'l
z';
R51=lx'lz';
R52 =mx'mz';
' ' 53 nxnz R =;
R54=mz'nx'+nz'mx';
R55=nz'lx'+lz'nx';
R56 =lz'mx'+mz'lx' ' ' 61l
xl
yR
=
;
R
62=
m
x'm
y';
R
63=
n
x'n
y';
R
64=
m
x'n
y'+
n
x'm
y';
' ' ' ' 65n
xl
yl
xn
yR
=
+
;
T
66=
l
x'm
y'+
m
x'l
y'Independentemente do referencial que se utilize, são sempre constantes
as seguintes grandezas:
1º Invariante das Tensões
1 ' ' ' ' ' yy zz xx yy zz
I
xx+
σ
+
σ
=
σ
+
σ
+
σ
=
σ
(1.19)
2º Invariante das Tensões
2 ' ' 2 ' ' 2 ' ' ' ' ' ' ' ' ' ' ' ' ' 'x y y yy zz zz xx xy yz zx x
σ
σ
σ
σ
σ
τ
τ
τ
σ
+
+
−
−
−
=
2 2 2 2I
zx yz xy xx zz zz yy yy xx+
+
−
−
−
=
=
σ
σ
σ
σ
σ
σ
τ
τ
τ
(1.20)
3º Invariante das Tensões
' ' ' ' ' ' 2 ' ' ' ' 2 ' ' ' ' 2 ' ' ' ' ' ' ' ' ' 'x yy zz xx yz yy zx zz xy
2
xy yz zx xσ
σ
σ
τ
σ
τ
σ
τ
τ
τ
τ
σ
−
−
−
+
=
2
=
σ
xxσ
yyσ
z−
σ
xxτ
yz2−
σ
yyτ
zx2−
σ
zzτ
xy2+
τ
xyτ
yzτ
zx=
I
3(1.21)
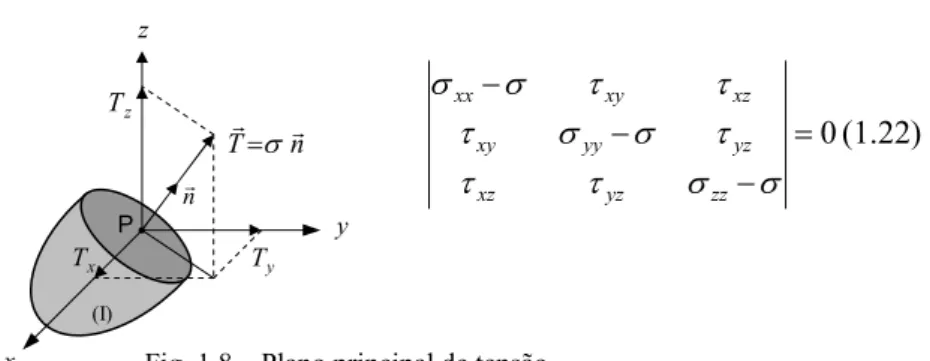
1.1.6. Tensões Principais
Para determinadas orientações do plano de corte, o vector tensão
resultante T
r
é paralelo ao versor normal n
r
, Fig.1.8, sendo nula a
respectiva componente de corte (τ = 0). Tal plano diz-se um plano
principal de tensão e a direcção n
r
perpendicular a esse plano principal é
uma direcção principal de tensão. A tensão normal que lhe corresponde,
Em cada ponto P, existem pelo menos três planos principais mutuamente
ortogonais, aos quais estão associadas, no máximo, três tensões
principais distintas. As tensões principais
σ
1≥
σ
2≥
σ
3são as três raízes
da seguinte equação algébrica do 3º grau em
σ
:
0
=
−
−
−
σ
σ
τ
τ
τ
σ
σ
τ
τ
τ
σ
σ
zz yz xz yz yy xy xz xy xx(1.22)
ou seja, desenvolvendo a expressão para o determinante acima:
) 23 . 1 ( 0 ) 2 ( ) ( ) ( 2 2 2 2 2 2 2 3 = + − − − − − − − + + + + + − xz yz xy xy zz xz yy yz xx zz yy xx xz yz xy xx zz zz yy yy xx zz yy xx
τ
τ
τ
τ
σ
τ
σ
τ
σ
σ
σ
σ
σ
τ
τ
τ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
Para cada uma dessas tensões principais, a respectiva direcção é dada
pelo sistema de equações lineares seguinte:
=
−
+
+
=
+
−
+
=
+
+
−
0
)
(
0
)
(
0
)
(
n
m
l
n
m
l
n
m
l
zz yz xz yz yy xy xz xy xxσ
σ
τ
τ
τ
σ
σ
τ
τ
τ
σ
σ
(1.24)
onde
σ
assume os valores
σ
1,
σ
2ou
σ
3, respectivamente.
Relativamente ao triedro principal {
n1,n2 ,n3r r r
}, as expressões das
componentes da tensão normal e de corte para a um plano qualquer,
definido pelos respectivos co-senos directores (l, m, n), são as seguintes:
3 2 2 2 1 2
σ
σ
σ
σ
=
l
+
m
+
n
(1.25)
e
Fig. 1.8 – Plano principal de tensão
z z T n T r r σ = y T nr x T x y (I) P
2 2 2 1 3 2 2 2 3 2 2 2 2 2 1 2 3 2 2 2 1 2 2 3 2 2 2 2 2 1 2 2
)
(
)
(
)
(
)
(
l
n
n
m
m
l
n
m
l
n
m
l
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
τ
−
+
−
+
−
=
+
+
−
+
+
=
(1.26)
1.1.7. Valores Máximos das Tensões Normais e de Corte
Os valores estacionários das tensões normais num ponto ocorrem para
planos de corte coincidentes com os planos principais de tensão nesse
ponto. Considerando a convenção habitual em tomar
σ
1≥σ
2 ≥σ
3, o
valor máximo da tensão normal é igual à maior das tensões principais
σ
1e o valor mínimo é igual a
σ
3.
Quanto à tensão de corte, o valor máximo em cada ponto é dado pela
expressão seguinte:
2
3 1σ
σ
τ
max=
−
(1.27)
e ocorre para um plano de corte definido por um versor normal
nrc, cujos
co-senos directores no triedro principal são os seguintes:
)
2
/
2
,
0
,
2
/
2
(
±
±
=
cn
r
(1.28)
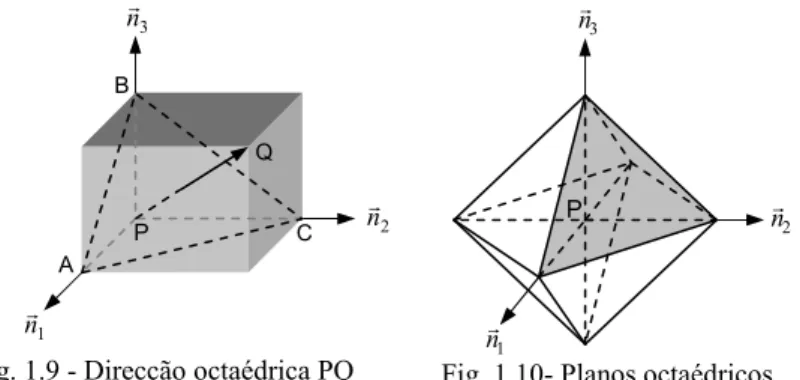
1.1.8. Tensões Octaédricas
As direcções e planos cujos co-senos directores, no referencial principal
no ponto P, satisfazem a condição:
3 1 2 2 2
=
m
=
n
=
l
(1.29)
são designadas direcções e planos octaédricos no ponto considerado,
respectivamente. Tais direcções estão orientadas segundo as diagonais de
um cubo de aresta unitária centrado no ponto considerado, Fig.1.9.
A área triangular ABC na Fig. 1.9 representa o plano octaédrico
correspondente ao primeiro quadrante, perpendicular à diagonal PQ.
Considerando todos os planos octaédricos à volta do ponto, obtém-se um
octaedro regular, conforme ilustrado na Fig.1.10.
A tensão normal em qualquer um dos planos octaédricos obtém-se
através da expressão habitual definida pela equação (1.25):
m zz yy xx oct
l
m
n
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
=
+
+
=
+
+
=
+
+
=
)
(
)
(
3 1 3 2 1 3 1 3 2 2 2 1 2(1.30)
A tensão de corte octaédrica τoct
é a tensão num plano octaédrico e
obtém-se a partir da equação (1.26), fazendo l
2=m
2=n
2=1/3, isto é:
[
]
[
2 2 2 2 2 2]
9 1 2 1 3 2 3 2 2 2 1 9 1 2 2 2 1 3 2 2 2 3 2 2 2 2 2 1 26
6
6
)
(
)
(
)
(
(1.31)
)
(
)
(
)
(
)
(
)
(
)
(
zx yz xy xx zz zz yy yy xx octl
m
m
n
n
l
τ
τ
τ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
σ
τ
+
+
+
−
+
−
+
−
=
−
+
−
+
−
=
−
+
−
+
−
=
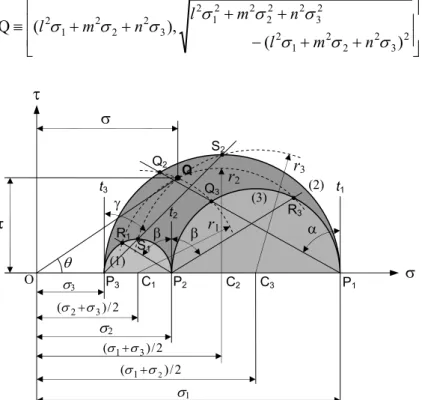
1.1.9. Construção de Mohr
(i)-Num diagrama rectangular plano, em que se toma a tensão normal (
σ
)
como abcissa e a tensão de corte (τ) como ordenada, Fig. 1.11,
marque-se sobre o eixo das abcissas os pontos P
1, P
2e P
3de tal modo que:
3 3 2 2 1 1 , OP , OP OP =
σ
=σ
=σ
Fig. 1.10- Planos octaédricos P 1 nr 2 nr 3 nr
Fig. 1.9 - Direcção octaédrica PQ
1 nr 3 nr 2 nr Q P A B C
(ii)-Tomando os segmentos P
2P
3, P
1P
3e P
1P
2 como diâmetros, desenharos três círculos de Mohr (1), (2) e (3) com centros nos pontos médios C
1,
C
2e C
3, respectivamente.
(iii)-A partir da vertical t
1em P
1marcar o ângulo
α
=arcos(l) que define a
recta P
1Q
3Q
2, que intersecta os círculos de Mohr (2) e (3) nos pontos Q
2e Q
3, os quais estão sobre uma mesma circunferência com centro em C
1.
(iv)-Com centro nesse ponto C
1, desenhar o arco de circunferência
Q
2;
(v)-Seguindo um procedimento análogo a (iii), a partir da vertical t
3em
P
3, marcar o ângulo
γ
=arcos(n) e desenhar a recta P3
S
1S
2 que intersectaos círculos de Mohr (1) e (2) nos pontos S
1e S
2, respectivamente.
(vi)- Com centro no ponto C
3, desenhar o arco de circunferência S
1QS
2;(vii)-A intersecção dos dois arcos de circunferência (iv) e (vi) define o
ponto Q, cujas coordenadas no plano (
σ
,
τ
) são:
+
+
−
+
+
+
+
≡
2 3 2 2 2 1 2 2 3 2 2 2 2 2 1 2 3 2 2 2 1 2)
(
),
(
Q
σ
σ
σ
σ
σ
σ
σ
σ
σ
n
m
l
n
m
l
n
m
l
Fig. 1.11- Diagrama de Mohr para as tensões
τ
θ 2 / ) (σ +2 σ3 2 / ) (σ1+σ3 2 / ) (σ +1 σ2σ
σ
τ
t2 α β β γr2
r3 (2) (3) (1) R1 S1 Q3 Q2 Q R3 P1 C2 C3 σ3 σ2 σ1 P 3 O C1 P2 t3 t1r1
S2O ponto Q representativo da tensão para o plano considerado tem
coordenadas tais que a sua abcissa é igual à componente normal da
tensão e a ordenada é igual à respectiva componente tangencial.
O raio vector OQ materializa o vector tensão resultante
T
(
P
,
n
r
)
r
e ângulo
θ=arctg(τ/σ), que o raio vector OQ faz com o eixo das abcissas,
representa a inclinação da tensão resultante
T
(
P
,
n
r
)
r
em relação à
semi-normal positiva n
r
do plano sobre o qual actua.
A terceira circunferência a tracejado na Fig. 1.11, com centro no ponto
C
2, pode também obter-se por um processo idêntico e permite confirmar
o rigor da construção anterior para a determinação do ponto Q:
(a)-Marcar o ângulo ß=arcos(m), para um e outro lado da vertical t
2em
P
2, e determinar os pontos de intersecção R
1e R
3com os círculos de
Mohr (1) e (3), respectivamente;
(b)-Com centro no ponto C
2, desenhar o arco de circunferência R
1QR
3.
Se o diagrama anteriormente construído estiver correcto, a circunferência
agora desenhada intersecta as outras duas no mesmo ponto Q.
1.1.10. Estado Plano de Tensão
Um estado plano de tensão corresponde ao caso em que as forças de
volume e as forças de superfície definem um plano único - o plano (x,y),
por exemplo - que contém as tensões em cada ponto. É o caso de uma
placa de espessura reduzida solicitada por um sistema de forças paralelas
ao plano da própria placa, Fig.1.12(a).
Um estado plano de tensão fica caracterizado pelas três componentes
σ
xx,σ
yy,τ
xy, sendo nulas as restantes componentes, isto é,σ
zz=τxz=τyz= 0.
Qualquer plano de corte perpendicular ao plano da placa ficará
identificado pelo ângulo θ que a respectiva normal faz com a direcção do
eixo Ox. Considerando o equilíbrio do elemento triangular ABC, Fig.
1.12(b), obtém-se:
)
2
(
)
2
(
2
2
θ
τ
θ
σ
σ
σ
σ
σ
=
xx+
yy+
xx−
yycos
+
xysen
(1.32)
)
2
(
)
2
(
2
θ
τ
θ
σ
σ
τ
=
−
xx−
yysen
+
xycos
(1.33)
A tensão de corte
τ
anula-se para um ângulo θ
ptal que:
( )
yy xx xytg
σ
σ
τ
θ
−
=
2
2
p(1.34)
Atendendo
a
que
tg(2θp
)
=
tg(2θp+π), existem duas direcções
mutuamente perpendiculares que
satisfazem a condição (1.34). Estas
Fig. 1.12 - Solicitação correspondente a um estado plano de tensão
(a) (b) nr yy σ yy σ xy τ z x x y y yy σ xx σ xy τ yx τ σ σ τ τ θ A B C 1 P r 2 P r 3 P r 4 P r 5 P r 6 P r 7 Pr 8 P r 9 Pr 10 P r θ xx σ σxx xy τ O x y θp 1 nr 2 nr
são as duas direcções principais de
tensão
n1 ne 2 r rno plano (x,y),
Fig.1.13.
Ao utilizar a equação (1.34) é habitual recorrer-se à seguinte regra
prática para identificar os ângulos
θ
1e
θ
2:
(i) - Se
τ
xy>
0
, o ângulo
θ
1está no intervalo
0<θ
1<π
/2(ii) - Se
τ
xy<
0
, o ângulo
θ
1está no intervalo
−π
/2<θ
1<0As tensões principais correspondentes são:
2 2 2 2 2 1
)
2
(
2
)
2
(
2
xy yy xx yy xx xy yy xx yy xxτ
σ
σ
σ
σ
σ
τ
σ
σ
σ
σ
σ
+
−
−
+
=
+
−
+
+
=
(1.35)
As tensões
σ
1e
σ
2 dadas pelas expressões (1.35) correspondem ao valormáximo e ao valor mínimo, respectivamente, da componente normal da
tensão no ponto considerado.
1.1.11. Tensões Principais Secundárias
Na situação mais geral duma solicitação tridimensional, as equações
(1.32)-(1.35) continuam válidas para as tensões no plano (x, y), embora
possam ser diferentes de zero as componentes
σ
zz, τxz e τyz. Neste caso as
tensões dadas pelas equações (1.35) dizem-se as tensões principais
secundárias no plano (x, y) e representam-se pelos símbolos
σ
’
1e
σ
’
2,
respectivamente:
2 2 2 2 ' 1)
2
(
2
2
)
2
(
2
xy yy xx yy xx xy yy xx yy xxτ
σ
σ
σ
σ
σ
τ
σ
σ
σ
σ
σ
+
−
−
+
=
+
−
+
+
=
(1.36)
As direcções definidas pela equação (1.34) são as direcções principais
secundárias
n
r
1'n
e
r
2'da tensão em P, no plano (x, y).
1.1.12. Círculo de Mohr para as Tensões num Plano
Adoptando para referência as duas direcções principais de tensão
n1 ne 2r r
,
no caso dum estado plano de tensão, ou
n
r
1'n
e
r
2', no caso mais geral, de
acordo com as equações (1.32) e (1.33), a tensão normal
σ
e a tensão de
corte τ para um plano oblíquo qualquer definido pelo ângulo θ,
relativamente a
nr1, Fig. 1.14, são dadas pelas seguintes expressões:
)
2
(
2
2
2 1 2 1σ
σ
σ
θ
σ
σ
=
+
+
−
cos
(1.37)
)
2
(
2
2 1σ
θ
σ
τ
=
−
−
sen
(1.38)
Aquelas duas componentes da tensão em P são as coordenadas do ponto
D sobre o círculo de Mohr desenhado num diagrama (
σ
, τ), conforme
ilustrado na Fig.1.15(a). O centro do círculo de Mohr é o ponto C sobre
o eixo das abcissas, à distância (
σ
1+σ
2)/2 da origem do diagrama, sendo
Fig. 1.14 - Plano oblíquo Fig. 1.15 - Círculo de Mohr no plano xy nr 1 nr 2 nr σ(θ+π/2) σ(θ) θ O A B C τ τ σ τ max τ yx τ xy τ yy σ xx σ 2 σ 1 σ 2 / ) (σ +1 σ2 θ 2 θ E’ D D’ P1 P2 C xy τ xy τ yy σ xx σ xx σ yy σ θ 1 σ 1 σ 2 σ 2 σ a d c b (a) (b) O E
o respectivo raio igual à semi-diferença das duas tensões principais
σ
1e
σ
2no plano xy, isto é, igual a (
σ
1-σ
2)/2.
Na construção do círculo de Mohr, o eixo τ é orientado positivamente no
sentido ascendente e o eixo
σ
no sentido da esquerda para a direita. As
tensões normais positivas indicam tracção e as tensões de corte são
consideradas positivas quando definem um binário que tende a fazer
rodar o elemento sobre que actuam no sentido do movimento dos
ponteiros do relógio. É o caso das tensões de corte que actuam nas faces
bc e ad do elemento abcd representado na Fig.1.15(b). À medida que o
ângulo θ varia, desde o valor θ = 0 até θ = π/2, o ponto D sobre a
Fig.1.15(a), desloca-se de P
1para P
2, de tal forma que a parte superior do
círculo de Mohr representa as tensões para todos os valores de θ
compreendidos entre aqueles dois limites. A metade inferior do círculo
de Mohr representa as tensões para valores do ângulo θ compreendidos
entre θ =
−
π /2 e θ =0.
Prolongando o raio CD até ao ponto D’, Fig.1.15(a), isto é, se se
considerar o ângulo π+2θ em vez de 2θ, obtêm-se as tensões que actuam
no plano BC perpendicular a AB, conforme representado na Fig.1.14.
A construção representada na Fig.1.15(a) pode também ser utilizada para
determinar as direcções principais de tensão no ponto considerado. Com
efeito, se forem conhecidas as componentes
σ
xx,σ
yy e τxyda tensão
relativamente a um sistema de eixos arbitrário Oxy, ficam perfeitamente
identificados os pontos D e D’, que definem um diâmetro do círculo de
Mohr. Traçando depois a respectiva circunferência com centro no ponto
C, obtêm-se os pontos P
1e P
2sobre o eixo das abcissas, cujas distâncias
à origem definem as amplitudes das duas tensões principais. O ângulo
2θ, que define a orientação dos eixos principais de tensão, é dado pela
inclinação do diâmetro DD’ em relação ao eixo das abcissas.
1.2. PROBLEMAS RESOLVIDOS
Num determinado ponto P de um corpo material, a tensão resultante
T
r
para um plano de corte perpendicular ao eixo dos zz é
T
=
(
1
,
0
,
0
)
r
. Determine as componentes cartesianas σzz, τzx e τzy.
RESOLUÇÃO:
Geometricamente, tem-se uma situação conforme a representada na figura:
Aplicando, agora, a definição de cada uma das componentes cartesianas da tensão no ponto P, obtém-se:
0 ) 0 , 1 , 0 ( ) 0 , 0 , 1 ( 1 ) 0 , 0 , 1 ( ) 0 , 0 , 1 ( 0 ) 1 , 0 , 0 ( ) 0 , 0 , 1 ( = = = = = = = = = j T i T k T n zy n zx n zz r r r r r r τ τ σ PROBLEMA 1.2.2.
Para o caso considerado no problema anterior, determine a componente normal
σ e a componentede corte (τ) da tensão no ponto mesmo ponto P e para o plano de corte indicado. RESOLUÇÃO: z x y O ) 1 , 0 , 0 ( = nr ) 0 , 0 , 1 ( = n T r P
A componente normal (σσσσ ) é a projecção da tensão resultante (Tn r
) sobre a direcção (nr) da normal ao plano de corte, isto é:
0 ) 1 , 0 , 0 ( ) 0 , 0 , 1 ( = = =Tnnr r σ
A tensão de corte (ττττ ) é a projecção da tensão resultante (Tn r
) sobre o plano de corte. Neste caso particular, em que σ = 0, tem-se:
τ = |Tn| = 1
Ou, aplicando a expressão geral:
τ2
= T 2 - σ2 = 1 – 0 = 1
PROBLEMA 1.2.3.
No ponto P≡(1, 1, 1) de um corpo material, para um plano de corte (α) definido pela equação x+y-z-1=0, a tensão resultante correspondente é . Determine, no ponto P e para o plano de corte considerado:
a)-As componentes normal e tangencial da tensão. b)-A direcção da tensão de corte no plano α.
RESOLUÇÃO:
a) Componentes normal e tangencial da tensão em P
O versor (nr) da normal ao plano (α) é:
) ( ) , , ( 2 2 2 C B A C B A n + + = r
Onde A, B e C são os coeficientes de x, y e z, respectivamente, na equação do plano de corte (α). Isto é, para o caso em questão:
(
3/3, 3/3 , 3/3)
3 ) 1 , 1 , 1 ( − = − = nr donde a tensão normal:3 2 ) 3 / 3 3 / 3 2 3 ( ) 3 / 3 , 3 / 3 , 3 / 3 ( ) 1 , 2 , 3 ( = + + = − − = =Tnnr r σ e a tensão de corte: τ2 = T 2 − σ2 = (9 + 4 + 1) – 12 = 2
ou seja: τ= 2
b) Direcção da tensão de corte no plano αααα
Partindo da relação vectorial entre o vector tensão resultante e as suas componentes normal e de corte:
T r r r = τ + σ Pode escrever-se: = + = + = + y c y c x c T n τ n σ T m τ m σ T l τ l σ Donde: 2 2 2 3 / 3 3 2 1 0 2 3 / 3 3 2 2 2 2 2 3 / 3 3 2 3 = × + − = − = = × − = − = = × − = − = τ n σ T n τ m σ T m τ l σ T l z c y c x c PROBLEMA 1.2.4.
O campo das tensões num corpo material é definido pelas seguintes componentes cartesianas:
σxx=0 ; σyy=2y−2; σzz=1−z;
τxy=τyx=2y−5x; τyz=τzy=2y+4z−1; τxz=τzx=2−2z
Desenhe um paralelepípedo rectangular elementar centrado na origem das coordenadas (O) e, sobre cada uma das faces, represente as componentes das tensões que sobre ela actuam.
RESOLUÇÃO:
Na origem das coordenadas O≡(0, 0, 0) tem-se:
σxx= 0 ; σyy= −2; σzz= 1; τxy=τyx= 0; τyz=τzy= −1; τxz= τzx= 2
PROBLEMA 1.2.5
O estado de tensão num ponto de um corpo material é definido pelas seguintes componentes: MPa MPa MPa MPa MPa MPa zx yz xy zz yy xx 60 75 50 100 160 80 = − = = = = = τ τ τ σ σ σ
a) - Determine a componente normal e a componente de corte para um plano cuja normal está inclinada de α = 68° e β= 35° em relação aos eixos x e y, respectivamente.
b) - Determine os cossenos directores da tensão de corte no plano considerado.
RESOLUÇÃO:
a)-Cálculo das componentes normal (σσσ σ) e de corte (ττττ ) da tensão
As componentes do versor (
n
r
) da normal ao plano de corte são:(
)
0.43) , 82 . 0 , 37 . 0 ( 82 . 0 37 . 0 1 , 82 . 0 , 37 . 0 ) cos , º 35 cos , º 68 (cos ) cos , cos , (cos 2 2 = − + = = = γ γ β α nr Isto é,y
2 − = yy σ 2 + = xz τ 1 − = yz τ 1 − = zy τx
2 + = xz τ 2 + = zx τ 1 + = zz σ 2 − = yy σ 1 − = yz τ 1 − = zy τ º 45 2=− θ xz
l = 0.3746 ; m = 0.8192 ; n = 0.4344 O vector tensão resultante (Tn
r
) obtém, então, a partir da equação geral:
= z y x T T T zz yz xz zy yy xy zx yx xx σ τ τ τ σ τ τ τ σ x n m l
Donde, substituindo os valores para as componentes cartesianas da tensão e para os co-senos directores l, m e n, obtém-se, sucessivamente:
= z y x T T T − − 100 75 60 75 160 50 60 50 80 x 4344 , 0 8192 . 0 3746 . 0 = z y x T T T = × + × − × × − × + × × + × + × 43 . 0 100 82 . 0 75 37 . 0 60 43 . 0 75 82 . 0 160 37 . 0 50 43 . 0 60 82 . 0 50 37 . 0 80 5 . 4 2 . 117 0 . 97
Agora, as componentes normal (σσσσ ) e de corte (ττττ ) calculam-se da forma
habitual: = =Tnnr r σ 5 . 4 2 . 117 0 . 97 | 43 , 0 82 . 0 37 . 0 = 134.3 (MPa) τ2 = T 2 – σ2 =
T
x2+
T
y2+
T
z2−
σ
2 = 97.02 + 117.22 + 4.52 – 134.22 = 5131.55
.
5131
=
τ
= 71.6 (MPa)b)-Direcção da Tensão de Corte
Partindo da relação vectorial
T r r r = +τ σ Pode escrever-se:
= + = + = + z c y c x c T n n T m m T l l τ σ τ σ τ σ Donde: 65 . 0 7 . 71 37 . 0 2 . 134 0 . 97 − × = = − = τ σl T l x c 10 . 0 7 . 71 82 . 0 2 . 134 2 . 117 = × − = − = τ σm T mc y 75 . 0 7 . 71 43 . 0 2 . 134 5 . 4 − = × − = − = τ σn T n z c PROBLEMA 1.2.6.
Num ponto P de um corpo material considere um plano de corte π cuja normal tem cossenos directores l = 0.651, m = 0.520 e n = 0.553. A tensão resultante nesse ponto, para o plano considerado, é de 140 MPa e actua segundo uma direcção inclinada de 35° e 80° em relação aos eixos coordenados x e z, respectivamente.
a) -Determine a tensão normal e a tensão de corte no ponto P, para o plano considerado.
b) -Determine os cossenos directores da tensão de corte nesse plano.
c) - Se for τxy=20 MPa, τyz=-15 MPa e τzx=12 MPa, determine as componentes σxx, σyy e σzz.
RESOLUÇÃO:
a)-Cálculo da tensão normal e da tensão de corte
Sejam α, β e γ os ângulos de inclinação do vector tensão resultante relativamente aos eixos cartesianos x, y e z, respectivamente. Conhecidos os ângulos α=35º e γ=80º, o 3º ângulo β obtém-se a partir da equação seguinte:
cos2(α) + cos2(β) + cos2(γ) = 1 Donde: 55 . 0 ) ( cos ) ( cos 1 ) ( cosβ = − 2α − 2 γ =
Tx = T x cos(α) = 140 x cos(35º) = 114.68 (MPa)
Ty = T x cos(β) = 140 x 0.55 = 76.53 (MPa)
Tz = T x cos(γ) = 140 x cos(80º) = 24.31 (MPa)
Agora, as componentes normal (σ ) e de corte (τ ) calculam-se da forma habitual: = =Tnnr r σ 31 . 24 53 . 76 68 . 114 | 553 , 0 520 . 0 651 . 0 = 127.90 (MPa) τ2 = T 2 – σ2 =
T
x2+
T
y2+
T
z2−
σ
2 = 19600- 16358 = 3242 3242 = τ = 56.94 (MPa)b)-Direcção da Tensão de Corte
Tal como no problema anterior, partindo da relação vectorial T r r r = +τ σ Pode escrever-se: = + = + = + z c y c x c T n n T m m T l l τ σ τ σ τ σ
Donde, os cossenos directores da direcção segundo a qual actua a tensão de corte: 55 . 0 94 . 56 651 . 0 90 . 127 68 . 114 − × = = − = τ σl T lc x 18 . 0 94 . 56 52 . 0 90 . 127 53 . 76 − × = = − = τ σm T mc y 82 . 0 94 . 56 553 . 0 90 . 127 31 . 24 − × =− = − = τ σn T nc z
c)- Cálculo das componentes σσσσxx, σσσσyy e σσσσzz
= z y x T T T zz yz xz zy yy xy zx yx xx σ τ τ τ σ τ τ τ σ x n m l
obtém-se, por substituição dos valores conhecidos para as três componentes de corte da tensão, para os cossenos directores l, m e n, e para as componentes Tx,
Ty e Tz: = 31 . 24 53 . 76 68 . 114 − − zz yy xx σ σ σ 15 12 15 20 12 20 x 553 , 0 520 . 0 651 . 0
Donde, desenvolvendo a multiplicação matricial:
σ σσ
σxx x 0.651 + 20 x 0.520 + 12 x 0.553 = 114.68
20 x 0.651 + σσσσyyx 0.520 -15 x 0.553 = 76.53
12 x 0.651 - 15 x 0.520 + σσσσzzx 0.553 = 24.31
Finalmente, resolvendo em ordem às componentes normais σxx, σyy e σzz: σxx = 150 (MPa)
σyy = 138 (MPa) σzz = 44 (MPa)
PROBLEMA 1.2.7.
Num determinado referencial global Oxyz, as componentes cartesianas da tensão num ponto P são as seguintes:
MPa MPa MPa MPa MPa MPa zx yz xy zz yy xx 3 1 2 1 2 1 − = = = − = = = τ τ τ σ σ σ
Determine as componentes da tensão num referencial Ox’y’z’, onde as orientações dos eixos x’, y’, z’ são definidas pelos seguintes ângulos:
a)- (x, x’) = π/4 ; (y, y’) = π/4; (z, z’) = 0. b)- (x, x’) = π/2 ; (y, y’) = π/2; (z, z’) = 0. c)- (x, x’) = 0 ; (y, y’) = π/2; (z, z’) = π/2. d)- (x, x’) = π/2 ; (y, y’) = 0; (z, z’) = π/2.
RESOLUÇÃO:
a)- (x, x’) = ππππ/4 ; (y, y’) = ππππ/4 ; (z, z’) = 0
Os eixos z e z’ são coincidentes, pelo que temos a situação representada geometricamente na figura seguinte:
Os co-senos directores dos eixos particulares x’, y’ e z’ no referencial global Oxyz são, respectivamente:
= = = = = = 0 ) 2 / cos( 2 / 2 ) 4 / cos( 2 / 2 ) 4 / cos( ' ' ' π π π x x x n m l , = = = + = − = − = 0 ) 2 / cos( 2 / 2 ) 4 / cos( 2 / 2 ) 4 / cos( ' ' ' π π π y y y n m l e = = = = = = 1 ) 0 cos( 0 ) 2 / cos( 0 ) 2 / cos( ' ' ' z z z n m l π π
Donde a matriz de transformação de coordenadas:
[ ]
− = = 1 0 0 0 2 / 2 2 / 2 0 2 / 2 2 / 2 ' ' ' ' ' ' ' ' ' z z z y y y x x x n m l n m l n m l lAs componentes cartesianas da tensão no referencial particular Ox’y’z’ calculam-se, agora, a partir das expressões habituais: