Bruno Miguel Gonçalves Valente
Texto
Imagem
![Figura 1.3 – Consumo de Energia eléctrica proveniente de Energia eólica em 2011 (adaptado de [7]).](https://thumb-eu.123doks.com/thumbv2/123dok_br/16583904.738679/27.892.153.763.97.418/figura-consumo-energia-eléctrica-proveniente-energia-eólica-adaptado.webp)
![Figura 2.3 – Percentagem de falhas de uma turbina eólica no ano de 2012 [15].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16583904.738679/31.892.191.731.633.964/figura-percentagem-de-falhas-uma-turbina-eólica-ano.webp)

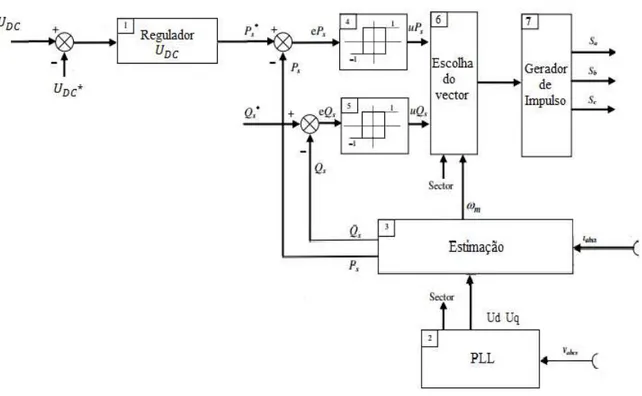
![Figura 3.6 – Esquema de controlo do conversor do lado do rotor [51].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16583904.738679/50.892.153.769.115.440/figura-esquema-de-controlo-do-conversor-lado-rotor.webp)

Documentos relacionados
Andava o senhor Vento pé ante pé na vinha quando avistou um cão:!. – Senhor Vento,
É necessário acentuar o conteúdo da idéia de acesso à Justiça que não há de significar simplesmente o acesso ao Poder Judiciário; não só porque também existe o
Além dessa entrega de trabalhos formais é interessante, no entanto, promover uma roda de conversa mais informal, em sala de aula, para debater com os alunos que pontos da leitura
O Fundo de Investimentos Maratona Programado é uma excelente opção para você que está fazendo seu planejamento financeiro pessoal e quer começar a investir na bolsa de valores
Suponha que voc ˆe sabe que a vari ´avel aleat ´oria cont´ınua X com distribuic¸ ˜ao normal e n ˜ao conhecemos o desvio padr ˜ao σ.. Estimac¸ ˜ao intervalar para σ2
F IGURA 100-A) D IAGRAMA DE ROSETAS FRENTE 814 MÉTODO CLÁSSICO E B) P ROJEÇÃO DOS PLANOS DE DESCONTINUIDADE E DIAGRAMA DE DENSIDADE DOS PÓLOS FRENTE 814 MÉTODO CLÁSSICO.. 86
Tendo como parâmetros para análise dos dados, a comparação entre monta natural (MN) e inseminação artificial (IA) em relação ao número de concepções e
Quando contratados, conforme valores dispostos no Anexo I, converter dados para uso pelos aplicativos, instalar os aplicativos objeto deste contrato, treinar os servidores
