UNIVERSIDADE FEDERAL DE UBERLÂNDIA
FACULDADE DE ENGENHARIA ELÉTRICA
PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
O Uso de Realidade Virtual e Aumentada na Visualização do
Fluxo do Campo Magnético de um Motor de Indução Monofásico
Jucélio Costa de Araújo - Orientando
Alexandre Cardoso, Dr – Orientador
Edgard A. Lamounier Junior, PhD – Co-orientador
JUCÉLIO COSTA DE ARAÚJO
O Uso de Realidade Virtual e Aumentada na Visualização do
Fluxo do Campo Magnético de um Motor de Indução Monofásico
Dissertação apresentada por Jucélio Costa de Araújo, à Universidade Federal de Uberlândia (UFU), Faculdade de Engenharia Elétrica, para obtenção do título de Mestre em Ciências.
Área de Concentração
Processamento da Informação
Banca Examinadora:
Profº. Alexandre Cardoso, Dr. (UFU)-Orientador.
Profº. Edgard A. Lamounier Jr., PhD (UFU) – Co-Orientador Profº. Kleiber D. Rodrigues, Dr. (UFU)-Banca
Dados Internacionais de Catalogação na Publicação (CIP)
A663u
Araújo, Jucélio Costa de, 1970-
Uso de realidade virtual e aumentada na visualização do fluxo do campo magnético de um motor de indução monofásico / Jucélio Costa de Araújo. - 2008.
95 f.: il.
Orientador: Alexandre Cardoso.
Dissertação (mestrado) – Universidade Federal de Uberlândia, Programa de Pós-Graduação em Engenharia Elétrica.
Inclui bibliografia.
1. Realidade virtual - Teses. 2. Motores elétricos de indução - Teses. 3. Correntes alternadas - Teses. 4. Campos magnéticos - Teses. I. Cardoso, Alexandre. II. Universidade Federal de Uberlândia. Programa de Pós-Gra-duação em Engenharia Elétrica. III. Título.
O Uso de Realidade Virtual e Aumentada na Visualização do
Fluxo do Campo Magnético de um Motor de Indução Monofásico
JUCÉLIO COSTA DE ARAUJO
Agradecimentos
A Deus, que em primeiro lugar me deu toda a força necessária para que pudesse alcançar meus objetivos, cuidando de mim nos momentos de angústia e celebrando comigo nos momentos de vitória, pois Ele é o motivo principal de minha existência e não sou nada sem Ele.
Ao Professor Alexandre Cardoso que tanto fez para que eu chegasse a este momento, quanto pelas suas orientações, apoio, compreensão e dedicação.
Ao Professor Edgard Lamounier Júnior pelos constantes auxílios no decorrer desta caminhada, como também pelo apoio e amizade.
Ao Professor Marcos Wagner pela grande ajuda no desenvolvimento do projeto, que sempre acompanhou a execução do mesmo, e cujas palavras não são suficientes, para mostrar o agradecimento que devo.
À Coordenação do Curso de Pós-Graduação em Engenharia Elétrica pela oportunidade de realização deste trabalho.
Aos colegas do Laboratório de Realidade Virtual de Goiás, onde foi desenvolvida boa parte desta dissertação, principalmente ao colega Rodrigo Vasconcelos Arruda pela ajuda na modelagem dos objetos virtuais.
Ao amigo Wender Antônio da Silva, que foi o meu parceiro constante nesta empreitada, pois estávamos juntos num mesmo caminho dividindo as alegrias e as tristezas, as dificuldades e as vitórias que conseguimos nesta trajetória, para que cada um de nós pudesse alcançar os nossos respectivos objetivos.
A minha mãe Lenita Costa de Araújo, que sempre esteve comigo durante este período de estudo, me ajudando principalmente em um momento muito delicado de minha vida, sem a qual talvez não pudesse ter chegado até aqui, ao meu irmão Juci Junior; e a meu pai Juci Tenório que apesar de não estar entre nós, tenho a certeza que ele está olhando por mim e por nossa família, junto ao PAI lá no céu reforçando o time dos anjos, com sua simplicidade e amor pela família.
Aos colegas de Trabalho do CEFET - Morrinhos - GO, pela compreensão referente às substituições feitas nas aulas em que não pude estar presente, devido a minhas idas e vindas nas estradas da vida durante o desenvolver deste projeto.
RESUMO
ARAÚJO, Jucélio C., O Uso de realidade virtual e aumentada na visualização do fluxo do campo magnético em um motor de indução monofásico. Dissertação (Mestrado em
Ciências) Programa de Pós-Graduação em Engenharia Elétrica, UFU, 2008.
Esta dissertação apresenta uma aplicação de Realidade Virtual e Aumentada, tendo como foco principal o estudo do campo magnético criado por um motor de indução monofásico durante o seu funcionamento. A Realidade Virtual e a Realidade Aumentada a cada dia vêm se destacando, devido ao surgimento de suas inúmeras aplicações nas mais variadas áreas do conhecimento, e uma das mais beneficiadas é a educação. Portanto estas tecnologias vêm se tornando ferramentas de apoio ao ensino, auxiliando a percepção e interação dos alunos em assuntos diversos. A visualização do campo magnético está relacionada com estratégias de utilização de elementos ferromagnéticos. Tais campos, a exemplo de outros (Campo Elétrico, Campo Gravitacional) têm características tridimensionais. Sendo que grande parte das imagens referentes a este fenômeno físico é estática o que na maioria das vezes acaba dificultando ao aprendizado deste tema. Neste trabalho, o Campo Magnético poderá ser visualizado, pelo usuário, com uso de Realidade Virtual ou Realidade Aumentada. O elemento de estudo será o Campo Magnético que é gerado em um motor elétrico (de indução monofásico). Pretende-se, por meio desta abordagem, identificar as vantagens de se utilizar as técnicas de Realidade Virtual e Realidade Aumentada em relação à outras formas de visualização do campo magnético.
ABSTRACT
ARAÚJO, J C. The use of the Virtual and Augmented Reality in the Visualization of flow of the magnetic field in an induction motor single phase. Dissertation (Master's degree in
Sciences) Program of Masters degree in Electric Engineering, UFU, 2008.
This dissertation presents an application of Virtual and Augmented Reality, having as main focus the study of the magnetic field created by a single-phase engine of induction during its functioning. Virtual Reality and Augmented Reality potentially emerges every days, due increasing number of its applications in the most varied areas of the knowledge. One of the most benefited is Education. Therefore, these technologies becomes supporting tools for education, for assisting in the perception and interaction of the students in diverses subjects. The visualization of the magnetic field is related to strategies of use of ferromagnetic elements. Such fields, the example of others (Electric Field, Gravitational Field) have three-dimensional characteristics. Since great part of the referring images to this physical phenomenon is static what most of the time it finishes making it difficult the learning of this subject. In this work, the Magnetic Field could be visualized, for the user, with use of Virtual Reality or Augmented Reality. The study element will be the Magnetic Field that is generated in an electric engine (of single-phase induction). It is intended, by means of this boarding, to identify the advantages of if using the techniques of Virtual Reality and Augmented Reality in relation the other forms of visualization of the magnetic field.
PUBLICAÇÕES
A seguir, será apresentada a publicação resultante deste trabalho:
ARAUJO, Jucélio C.;CARDOSO, Alexandre;LAMOUNIER JR, Edgard; RIBEIRO, Marcos Wagner de Souza. O Uso de Realidade Virtual e Aumentada na Visualização de Campos Magnéticos de Máquinas Elétricas. In: Workshop of thesis and dissertations, SVR 2008, X Symposium on Virtual and Augmented Reality, held in João Pessoa: UFPB, 2008.
Sumário
CAPÍTULO 1...1
1 INTRODUÇÃO...1
1.1 Motivação ...2
1.2 Objetivos e Metas.. ...3
1.3 Justificativa ...4
1.4 Organização da Dissertação ...4
CAPÍTULO 2...6
2 FUNDAMENTOS ENVOLVIDOS NO SISTEMA...6
2.1 Introdução...6
2.2 Máquinas Elétricas(Motores) ...6
2.2.1 Máquinas Assíncronas...8
2.2.1.1 Princípio de Funcionamento ...9
2.2.1.2 Produção de Campo Girante ...9
2.2.1.3 Motores de Indução ...9
2.2.1.4 Motores de Indução Monofásicos...10
2.2.3 Campo Magnético ...12
2.3 Realidade Virtual...13
2.3.1 Realidade Virtual Aplicada a Educação ...14
2.4 Realidade Aumentada...15
2.5 Considerações Finais ...17
CAPÍTULO 3...18
3TRABALHOS RELACIONADOS...18
3.1 Introdução...18
3.2 Sistema de Experiências Físicas Instrucional em Realidade Virtual – SEFIRV...18
3.3 Conservação da energia elétrica em sistemas industriais: sob a óptica da realidade virtual ...20
3.4 Construção de um Sistema de Realidade Virtual - Sistema de monitoramento e controle utilizando-se um PIC ...21
3.7 Service and Training through Augmented Reality - STAR ...25
3.8 Sistema Eic-RA ...25
3.9 ARAS – Augmented Reality Aided Surgery...26
3.10 Considerações Finais ...27
CAPÍTULO 4...29
4ARQUITETURA DO SISTEMA...29
4.1 Introdução...29
4.2 Tecnologias de Apoio...29
4.2.1 OpenGl ...30
4.2.2 ArtoolKit...30
4.2.3 Microsoft Visual Studio C++ ...31
4.2.4 Linguagem C ...32
4.2.5 3Ds Max 5.0 ...32
4.2.6 PIC ...32
4.3 Arquitetura Proposta do Sistema ...33
4.4 Visão geral do funcionamento do sistema com um diagrama de blocos...35
4.5 Considerações Finais ...35
CAPÍTULO 5...36
5 DESENVOLVIMENTO DO SISTEMA...36
5.1 Introdução...36
5.1.1 Caso de Uso do Sistema PVVAC...36
5.1.2 Caso de Uso : Ativar o ambiente de RV...37
5.1.3 Caso de Uso : Visualizar o campo no Motor RV ...37
5.1.4 Caso de Uso : Ativar o ambiente RA ...38
5.1.5 Caso de Uso : Visualizar o Campo no motor Real ...39
5.2 Ferramentas de Programação Utilizadas ...40
5.3 Composição do Motor Elétrico e Modelagem utilizada...40
5.4 Placa de Comunicação (Protoboard) ...42
5.4.1 Objetivos da Placa ...43
5.7 Principio de funcionamento do motor ...48
5.7.1 Descrição do motor monofásico utilizado...49
5.8 Funcionamento do Sistema...50
5.8.1 Realidade Virtual ...51
5.8.2 Realidade Aumentada...53
5.8.3 Considerações Finais ...56
CAPÍTULO 6...57
6AVALIAÇÃO E LIMITAÇÕES...57
6.1 Introdução...57
6.2 Avaliação do Sistema PVVAC...57
6.2.1 Quanto a clareza dos termos utilizados (Finalidade do protótipo) ...58
6.2.2 Quanto ao número de funções existentes no sistema (Usabilidade)...58
6.2.3 Facilidade de uso do sistema.(Funcionalidade)...59
6.2.4 Quanto a Interatividade do sistema com o usuário...60
6.2.5 Quanto ao número de passos necessário para a realização de uma atividade no protótipo ...60
6.2.6 Controle sobre a atividade do Motor (Possibilidade de interrromper, suspender) ...61
6.2.7 Possibilidade de visualização clara do que está sendo executado ...62
6.2.8 Quanto ao aprendizado referente á visualização do campo magnético ...63
6.2.9 Quanto ao controle do cenário de RV e RA do motor...64
6.2.10 Em relação ao uso da Realidade Aumentada como ajuda na compreensão do experimento (Ensino-Aprendizagem)...65
6.2.11 Em relação ao uso da Realidade Virtual como ajuda na compreensão do experimento (Ensino Aprendizagem)...66
6.2.12 Opinião Geral sobre o uso do sistema ...67
6.3 Limitações do PVVAC...68
6.4 Considerações Finais ...70
CAPÍTULO 7...71
7 CONCLUSÕES E TRABALHOS FUTUROS... 71
7.3 Trabalhos Futuros ...72
REFERÊNCIAS BIBLIOGRÁFICAS ...73 Anexo I...77
ÍNDICE TABELAS
Tabela 3-1 - Comparativa das características dos trabalhos relacionados...27
Tabela 5-1 – Relação dos Casos de Uso do Sistema PVVAC...36
Tabela 5-2 – Descrição do Caso de Uso ‘Ativar o ambiente RV’...37
Tabela 5-3 – Descrição do Caso de Uso ‘Visualizar o campo no motor RV’...38
Tabela 5-4 – Descrição do Caso de Uso ‘Ativar o ambiente RA’...39
Tabela 5-5 – Descrição do Caso de Uso ‘Visualizar o campo no motor Real’. ...39
ÍNDICE DE FIGURAS
Figura 1 – Tipos de motores elétricos ...7
Figura 2 – Componentes de um Motor de Indução ...10
Figura 3 – Estator utilizado em Motor de Indução Monofásico ...11
Figura 4 – Constituição de um Motor de Indução Monofásico ...11
Figura 5 – Decomposição de um Campo Pulsante...12
Figura 6 – Head-Mounted criado por Ivan Sutherland...13
Figura 7 – Ambiente Virtual de Química ...15
Figura 8 – Sistema de Realidade Virtual baseado em ambiente Virtual em um monitor...16
Figura 9 – Diagrama de Realidade e Virtualidade Contínua ...16
Figura 10 - Sistema de ensino de legislação no transito usando RA...17
Figura 11 - Arquitetura do sistema SEFIRV ...19
Figura 12 - Página de Abertura do SEFIRV...19
Figura 13 – Bomba Centrifuga Modelada ...20
Figura 14 - Bicicleta o projeto com suporte de treino acoplado ao motor ...21
Figura 15 - Ponto de vista do usuário no sistema...22
Figura 16 –Visualização de Poliedros ...23
Figura 17 –Arquitetura do Sistema SMMAR...24
Figura 18 – Sensores e Temporizador do SMMAR ...24
Figura 19 – Imagem do funcionamento do sistema STAR ...25
Figura 20 – EIC: Quebra-cabeça. ...26
Figura 21 -Imagem do funcionamento do ARAS...27
Figura 22 – Análise da imagem pelo ARToolKit...31
Figura 23 – Imagem do ambiente visual C++ ...32
Figura 24 – Microcontrolador USB PIC 18F2550 ...33
Figura 25 – Arquitetura proposta do Sistema ...33
Figura 26 – Diagrama em Blocos do Sistema ...35
Figura 27 – Caso de Uso do Sistema PVVAC ...36
Figura 29 – Use –Case “Visualizar o campo no motor RV” ...38
Figura 30 – Use –Case “Ativar o ambiente de RA” ...38
Figura 31 – Use –Case “Visualizar o campo no motor Real”...39
Figura 32 – Protótipo em sua fase Inicial ...40
Figura 33 – Motor Elétrico na fase inicial de modelagem ...41
Figura 34 – Motor Elétrico modelado no Software 3ds Max ...41
Figura 35 –Circuito de controle do protótipo ...42
Figura 36 – Esquema do Circuito de Controle do protótipo ...43
Figura 37 – Visão parcial do arquivo da modelagem do ambiente ...44
Figura 38 – Motor Elétrico virtual com o campo magnético ...45
Figura 39 – Motor Elétrico virtual desmontado ...46
Figura 40 – Marcador cadastrado para uso do Protótipo...47
Figura 41 – Campo Magnético base do Protótipo ...48
Figura 42 –Imagem Frontal e Lateral de um motor assícrono ...49
Figura 43 –Imagem do protótipo utilizado mais a placa controladora do sistema...50
Figura 44 – Menu de abertura do protótipo ...51
Figura 45 – Ambiente Virtual em uso acionado pelo motor real através da protoboard ...51
Figura 46 – Motor Virtual sendo desmontado em pleno uso para uma melhor visualização do Campo Magnético ...52
Figura 47 – Visualização do Campo Magnético apenas no estator...53
Figura 48 – Motor Real sendo visualizado pela WebCam ...53
Figura 49 – Inicialização do Campo Magnético em RA acionando-se o Motor Real...54
Figura 50 – Visualização II do Campo Magnético em RA ...55
Figura 51 – Visualização III do Campo Magnético em RA...55
Figura 52 – Finalidade do protótipo ...58
Figura 53 – Usabilidade do protótipo...59
Figura 54 – Funcionalidade do protótipo ...59
Figura 55 – Interatividade do protótipo...60
Figura 56 – Passos para a realização de uma atividade no protótipo ...61
Figura 59 – Aprendizado a visualização do campo magnético ...64
Figura 60 – Controle do cenário de RV e RA do motor...65
Figura 61 – Uso da RA como ajuda na compreensão do experimento...66
Figura 62 – Uso da RV como ajuda na compreensão do experimento...67
LISTA DE ABREVIATURAS
2D - Bidimensional
3D - Tridimensional
API - Application Programming Interface
ARToolKit - Augmented Reality Tool Kit
CC - Corrente Continua
CA -Corrente Alternada
MCA - Motores de Corrente Alternada
MCC - Motores de Corrente Continua
MI - Motores de Indução
CAD - Computer Aided Design
GLU - Graphic Library User
GLUT - Graphic Library User Tool Kit GLX - Graphic Library Extension
HMD - Head Monted Display
MATLAB - Matematic of Laboratory
MIT - Instituto de Tecnologia de Massachusets
OpenGL - OpenGraphics Library
RA - Realidade Aumentada
RV - Realidade Virtual
VRML - Virtual Reality Modeling Language
USART - Universal Syncronous and Asyncronous Receiver Transmitter
CAPÍTULO 1
1 - INTRODUÇÃO
A educação é uma área ampla que conta com a informática como ponto de apoio. O uso do computador pode propiciar condições para que o aluno construa o seu conhecimento. Neste contexto, a Realidade Virtual assume papel de importância no que se refere a novos métodos de aprendizado por meio da criação de ambientes de aprendizagem, capazes de prover uma melhor visualização e interação com assunto apresentado. Ferramentas de RV, destinadas a educação, favorecem a fixação de conteúdos a curto e longo prazo e criam uma nova forma individualizada de representação de conhecimentos, propiciando melhor tratamento das informações (PINHO, 2000)
A Realidade Virtual (RV) pode ser definida como uma técnica avançada de interface, onde o usuário pode realizar imersão, navegação e interação em um ambiente sintético tridimensional gerado por computador, utilizando canais multi-sensoriais em tempo real (KIRNER, 1999). O objetivo dessa tecnologia é recriar ao máximo, a sensação de realidade para um indivíduo, levando-o a adotar essa interação como uma de suas realidades temporais. Já outra tecnologia que vem se despontando rapidamente é a Realidade Aumentada (RA) definida como uma combinação da visão do ambiente real com o ambiente virtual (BILLINGHURST, 2005), objetivando a criação de um sistema, tal que o usuário não consiga distinguir o mundo real do virtualmente aumentado. Para tanto, os elementos reais e virtuais necessitam ser alinhados corretamente, um em relação ao outro (AZUMA,1997). A Realidade Virtual e a Realidade Aumentada são áreas relacionadas com novas gerações de interface do usuário, facilitando e potencializando as interações do usuário com as aplicações computacionais (CARDOSO et.al, 2007).
virtual, de maneira mais natural e sem necessidade de treinamento ou adaptação (TORI, KIRNER & SISCOUTTO, 2006).
Com isso, as pesquisas em Realidade Virtual e Aumentada vêm crescendo consideravelmente, por meio de vários grupos de pesquisa, ligados à indústria, ao entretenimento e, principalmente à educação. Além disso, existem muitos estudos, soluções e implementações para possibilitar que mais de uma pessoa faça parte de um Ambiente Virtual (JING et al., 2005).
Neste contexto, a Realidade Virtual e Aumentada despontam como bons instrumentos de apoio à educação para criação de cenários imaginados, podendo resolver o problema de abstração de alguns conteúdos, pois é crescente a preocupação dos docentes com o insucesso dos alunos na aprendizagem.
1.1 Motivação
A Informática exige dos indivíduos um conjunto de habilidades que os permitem dominar processos cognitivos e práticos para que vivam em um mundo onde a adaptabilidade, flexibilidade e criatividade são habilidades essenciais (SILVA, 2001).
Segundo Silva (2001), o uso ou a incorporação das novas tecnologias da Informática e Telemática nos processos educativos têm implicações diversas e ainda representam um salto de dimensões desconhecidas. Estas vão além das questões pedagógicas e ultrapassam de longe os muros de uma escola ou de uma sala de aula. Com o uso da informática é possível estimular o raciocínio das pessoas, capacitando-as à resolução de situações de problemáticas complexas.
Educação. O sistema proposto chama-se PVVAC( Protótipo de Visualização Virtual e Aumentada do Campo Magnético).
A Realidade Virtual (RV) é, antes de tudo, uma “interface avançada do usuário” para acessar aplicações executadas no computador, tendo como características, a visualização de, e movimentação em, ambientes tridimensionais em tempo real e a interação com elementos desse ambiente (TORI, KIRNER & SISCOUTTO, 2006).
E dentro do contexto da Realidade Virtual, pode-se destacar Azuma (2001) o qual relata que a Realidade Aumentada (RA) é a inserção de objetos virtuais no mundo real por meio de um dispositivo computacional. Desta forma, a interface do usuário é aquela que ele usa no ambiente real, adaptada para visualizar e manipular os objetos virtuais colocados no seu espaço (AZUMA, 2001).
1.2 Objetivos e Metas
Este trabalho tem como objetivo investigar o uso de técnicas de Realidade Virtual e Aumentada para contribuir para a visualização do campo eletromagnético a fim de auxiliar o ensino aprendizado de máquinas elétricas. Pretende-se permitir que o usuário possa interagir com o sistema proposto, para que o mesmo possa conhecer como o campo magnético atua em um motor de indução monofásico, podendo ver o seu formato durante o seu surgimento, no qual o usuário pode optar pela visualização do campo no ambiente de RV ou então optar pela visualização do campo no ambiente de RA.
Para tanto as seguintes metas foram estipuladas:
1. Revisão Bibliográfica.
2. Propor uma arquitetura de sistema computacional para a visualização do Fluxo de
Campo Magnético.
3. Escolher uma representação gráfica do Fluxo de Campo Magnético.
4. Montar a placa de comunicação protoboard com o microcontrolador PIC para a
comunicação do Motor real com o mundo virtual (Motor e Campo Magnético Virtual).
5. Gerar o Fluxo de Campo Magnético Virtual em RV;
6. Construir o sistema proposto para a visualização do Campo através de RV e RA. 7. Gerar o Fluxo de Campo Magnético Virtual em RA;
9.
Avaliar a performance do sistema através de questionário repassados aos usuários potenciais para análise do uso do mesmo.1.3 Justificativa
Tradicionalmente, na bibliografia não é possível a visualização do Campo Magnético no formato 3D, pois grande parte das imagens referentes a este fenômeno físico são estáticas, sendo apresentadas em livros e revistas, o que na maioria das vezes acaba dificultando o aprendizado deste tema. Com isso a visualização do campo acaba se tornando motivo de controvérsias entre diferentes autores não se chegando a um consenso de como seria o real formato deste campo, gerando diferentes tipos de imagens que confunde muitas vezes as pessoas que estudam este fenômeno. Por isso as dificuldades que existem na visualização do campo magnético, geram alguns obstáculos para o seu aprendizado, o que faz com que este trabalho tenha um fator positivo de poder mostrar que a RV e a RA podem ser ferramentas que auxiliem a educação para facilitar nos estudos sobre campo magnético devido a boa interação e percepção existente entre o usuário e o sistema utilizado.
O ensino de máquinas elétricas é uma área promissora no que tange o uso de Realidade Virtual e Realidade Aumentada, pois as visualizações dos princípios básicos que envolvem esta área podem produzir resultados satisfatórios. Com isso tais tecnologias podem ser usadas como ferramentas de apoio ao ensino, pois a demonstração do fluxo do campo magnético em um motor, podem ser apresentados de uma maneira mais visual e interativa.
1.4 Organização da Dissertação
A presente dissertação consiste de 7 capítulos, incluindo a introdução, já apresentada: O Capítulo 1 apresenta a introdução do trabalho formado pela motivação, objetivos, justificativas, metas e a estrutura do trabalho.
O Capítulo 2 apresenta uma visão geral sobre alguns conceitos de Engenharia relacionados aos Motores elétricos, Campo magnético, Realidade Virtual, Realidade Aumentada e Ensino.
O Capítulo 4 apresenta-se uma análise do sistema proposto, descrevendo-se a arquitetura do sistema e seus módulos, e as tecnologias envolvidas.
O Capítulo 5 apresenta o desenvolvimento do sistema, mostrando os detalhes de implementação do mesmo, bem como funcionamento do sistema para visualização do campo magnético.
O Capítulo 6 apresenta os resultados da avaliação e as limitações descobertas com a apresentação do protótipo, a um grupo de alunos do curso técnico de informática e eletrônica de um Órgão Federal (CEFET), e posterior questionamento sobre o aprendizado adquirido pelo uso do protótipo em relação ao estudo do campo magnético .
CAPÍTULO 2
2 - FUNDAMENTOS ENVOLVIDOS NO SISTEMA
2.1
Introdução
O uso da Informática em temas que envolvam a Educação vem a cada dia ganhando espaço em relação aos métodos tradicionais de ensino, haja vista o número enorme de sites que, com o formato 2D e 3D, buscam apresentar conceitos até então demonstrados de forma estática, fazendo com que o usuário possa interagir mais com os temas apresentados.
Este capítulo apresenta alguns dos conceitos que estão envolvidos diretamente com o desenvolvimento do trabalho, mostrando uma visão mais ampla destes elementos que influenciam na criação do protótipo, além de tratar dos conceitos fundamentais de Realidade Virtual e Aumentada necessários à compreensão do projeto proposto.
2.2 Máquinas elétricas (Motores)
A conversão eletromecânica de energia relaciona as forças elétricas e magnéticas com a força mecânica. Como resultado desta relação, a energia mecânica pode ser convertida em energia elétrica, e vice versa, através das máquinas elétricas (KOSOW, 1979).
As máquinas elétricas rotativas, quando operam como geradores, transformam energia mecânica em energia elétrica e por outro lado convertem energia elétrica em mecânica quando operam como motor (CALVERT,2001).
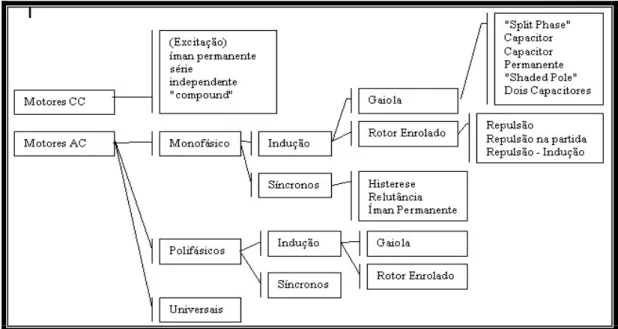
Figura 1 - Tipos de motores elétricos (UNIVERSIDADE DE COIMBRA- DEPARTAMENTO DE ENGENHARIA ELETROTÉCNICA, 2000)
Com o objetivo de diferenciar os dois tipos principais de motores, classificados de acordo com a alimentação, c.a ou c.c, descreve-se a seguir, de forma sintética seus princípios de operação.
Os motores de corrente contínua além do alto custo, necessitam de um retificador, para converter a tensão c.a da concessionária em tensão c.c para a sua alimentação. Esses motores tem como características um controle preciso de velocidade, desde baixas velocidade, como no caso da partida, até velocidades mais elevadas.
Na maioria dos MCC, o rotor (armadura) é um 'eletroímã' que gira entre os pólos de ímãs permanentes estacionários(campo). Para tornar esse eletroímã mais eficiente o rotor contém um núcleo de ferro, que se torna fortemente magnetizado, quando a corrente flui pela bobina. O rotor girará desde que essa corrente inverta seu sentido de percurso cada vez que seus pólos alcançam os pólos opostos do estator.
No entanto, os motores de corrente contínua (MCC) exigem manutenção constante devida a presença de alguns dispositivos como os comutadores e as escovas, o que aumentam substancialmente os custos de manutenção, além das limitações para aplicação em atmosfera explosiva. Devido a essas desvantagens os motores de corrente alternada (MCA) vêm ocupando o espaço onde anteriormente era ocupado pelos motores de corrente contínua (MCC).
O mais comum dos MCA que se tem conhecimento são os de indução. Neles, as correntes são induzidas nos enrolamentos do rotor por meio da combinação da variação, no tempo, de correntes no estator e do movimento do rotor em relação ao estator (FITZGERALD, 2006). O motor de indução funciona normalmente com velocidade constante, que varia ligeiramente com a carga mecânica aplicada ao eixo. Devido a sua grande simplicidade, robustez e baixo custo, é o motor mais utilizado de todos.
Na literatura ainda são apresentadas outros tipos de máquinas elétricas, entre eles o motor síncrono e o motor à relutância variável. O motor síncrono funciona com velocidade estável; utiliza-se de um induzido que possui um campo constante pré-definido e, com isso, aumenta a resposta ao processo de arraste criado pelo campo girante. É geralmente utilizado quando se necessita de velocidades estáveis sob a ação de cargas variáveis. Também pode ser utilizado quando se requer grande potência, com torque constante.
Outro tipo de motor de corrente alternada é o de relutância. O motor de relutância é normalmente considerado e inserido no grupo de máquinas elétricas especiais e uma das suas principais características são pólos salientes. Se o rotor de qualquer motor monofásico de indução, de circuito magnético uniformemente distribuído, for alterado de modo que as laminações tendam a produzir pólos salientes no rotor, a relutância do caminho do fluxo através do entreferro será maior onde não haja condutores embebidos nas ranhuras. À medida que se aproxima da velocidade síncrona, o torque de relutância é suficiente para fazer o motor entrar em sincronismos com o campo pulsante monofásico.
2.2.1 Máquinas Assíncronas
2.2.1.1 Princípio de Funcionamento
Como o interesse desse trabalho está focado nas máquinas assíncronas, nesse item é feito uma breve explanação sobre o princípio de funcionamento dessas máquinas. O princípio de operação de qualquer máquina CA está na interação entre o campo magnético girante criado pelas correntes do estator com um campo magnético oposto, induzido no rotor ou produzido (garantido) por fontes de corrente contínua. A interação entre esses dois campos produz o conjugado. (KOSOW, 1979).
2.2.1.2 Produção de Campo Girante
Em qualquer instante de tempo o campo magnético produzido por uma fase particular depende da corrente que flui nessa fase. Se a corrente é nula o campo magnético também será nulo. Em contrapartida se a corrente está em seu valor máximo, o campo resultante também apresentará um valor máximo. Visto que as correntes num sistema trifásico são adequadamente defasadas de 120º, o campo magnético também será defasado de 120º. Esses três campos irão se combinar, produzindo um único campo magnético que atuará no rotor. Em um motor de indução o campo magnético é induzido no rotor com polaridade oposta àquele produzido no estator. Portanto, como o campo magnético gira no estator na freqüência da rede, ele gira também no rotor para manter o alinhamento entre os campos do estator e rotor . (KOSOW, 1979; FITZGERALD, 2006).
2.2.1.3 Motores de Indução
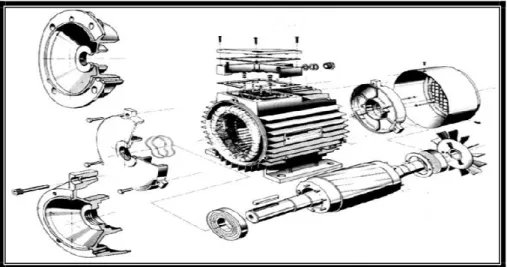
O motor de indução (MI) é praticamente o tipo de máquina de corrente alternada mais utilizado em aplicações industriais. Isso se deve principalmente à sua simplicidade construtiva e custos relativamente baixos. A razão disso é que o rotor das máquinas de indução é robusto e não necessita de conexões externas, tal como nas máquinas de corrente contínua. O rotor do MI é feito de material ferromagnético laminado, sendo o tipo mais comum o rotor gaiola de esquilo, onde são inseridas barras de cobre curto-circuitadas em suas extremidades.
Figura 2 – Componentes de um Motor de Indução (UNIVERSIDADE DE COIMBRA DEPARTAMENTO DE ENGENHARIA ELETROTÉCNICA – 2000)
2.2.1.4 Motores de Indução Monofásicos
Os motores monofásicos são assim chamados porque os seus enrolamentos do estator são ligados diretamente a uma fonte monofásica. Os motores de indução monofásicos são a alternativa natural aos motores de indução polifásicos, nos locais onde não se dispõe de alimentação trifásica, como residências, escritórios, oficinas e em zonas rurais.
Há numerosas instalações industriais e residenciais para as quais a alimentação de energia elétrica é feita apenas através de sistemas monofásicos CA. Além disto, em todas as instalações há, normalmente, necessidade de motores pequenos que, operando a partir de redes monofásicas, acionam várias máquinas, como sejam, máquinas de costura, furadeiras, aspiradores, condicionadores de ar, etc. Genericamente, o termo “motor pequeno” significa um motor de menos de 1HP, isto é, um motor de potência fracionária, e a maioria dos motores monofásicos é, na verdade, de motores de potência fracionária. Mas os motores monofásicos são também construídos nos tamanhos correspondentes às potências inteiras: 1.5,2,3,5,7.5,10 HP para redes monofásicas de 115V ou 230V, ou mesmo 440V para as unidades de 7.5,10 HP (KOSOW, 1979).
deslocada no espaço e no tempo do estator e de impedâncias diferentes. Assim há dois enrolamentos, em paralelo, ambos ligados à mesma fonte CA monofásica (KOSOW, 1979).
A figura 3 nos mostra um modelo de estator utilizado em motores de indução monofásico.
Figura 3 – Estator utilizado em Motor de Indução Monofásico (MARQUES, 2005)
Por terem somente uma fase de alimentação, não possuem um campo girante como os motores polifásicos, mas sim um campo magnético pulsante. Isto impede que tenham binário de arranque, tendo em conta que no rotor se induzem campos magnéticos alinhados com o campo do estator. Para solucionar o problema de arranque utilizam-se enrolamentos auxiliares, que são dimensionados e posicionados de forma a criar uma segunda fase fictícia, permitindo a formação do campo girante necessário para o arranque (NOLL, 2006).
O campo pulsante é um campo relativamente estacionário. Contrariamente ao motor de indução polifásico, portanto, a freqüência do rotor, relativa à fem de velocidade, induzida nos condutores de um motor em funcionamento, é elevada, ocorrendo o mesmo com a reatância do rotor. O campo pulsante, em quadratura, do rotor reage contra o campo pulsante principal para produzir um campo magnético resultante. (KOSOW, 1979).
A figura 5 nos mostra a decomposição de um campo pulsante.
Figura 5 – Decomposição de um campo pulsante (MARQUES, 2005).
2.2.3 Campo magnético
nota-se que o seu contato com limalhas de ferro fazem com que as mesmas se aderem as extremidades deste, essas extremidades são chamadas de pólo. A parte do imã que se volta para o norte geográfico é conhecido como pólo norte, e a parte que se volta para o sul geográfico são chamados de pólo sul. A região do espaço que envolve os imãs é denominada campo magnético. Sua representação é feita través de linhas de indução que são linhas imaginárias fechadas que saem do pólo norte e entram no pólo sul (BONJORNO& RAMOS, 2001).
A variação do fluxo magnético pode resultar se aplicada a um condutor, na movimentação de cargas e no aparecimento, por conta desta movimentação, de um campo elétrico no interior do mesmo (fenômeno conhecido por indução eletromagnética, mecanismo utilizado em geradores elétricos, motores e transformadores de tensão). De forma equivalente, a movimentação de cargas elétricas em um condutor é fonte de campo magnético. (SILVA, 2008).
2.3
Realidade Virtual
O termo Realidade Virtual (RV) foi cunhado no final da década de 1980 por Jaron Lanier, artista e cientista da computação que conseguiu convergir dois conceitos antagônicos em um novo e vibrante conceito, capaz de captar a essência dessa tecnologia: a busca da fusão do real com o virtual (TORI & KIRNER, 2006, p. 11).
Como se vê, apesar de ser relacionada com tecnologia computacional de ponta, a Realidade Virtual não é uma área de pesquisa tão recente quanto possa aparecer, nem estrita a profissionais da computação (TORI & KIRNER, 2006, p. 10-11).
A introdução de interação entre usuário e aplicação por meio de elementos gráficos exibidos numa tela foi comprovada em 1963, com o trabalho de doutorado de Ivan Sutherland, no MIT (PINHO, 2000). A figura 6 representa o Head-mounted display criado por
Ivan Sutherland.
A Realidade Virtual envolve tecnologias revolucionárias para o desenvolvimento de aplicações, em função de novas possibilidades que oferece para interfaceamento com o uso de dispositivos multi-sensoriais, navegação em espaços tridimensionais, imersão no contexto da aplicação e interação em tempo real (CARDOSO et. al., 2007).
A Realidade Virtual nos permite entrar em um mundo em que muitas vezes, jamais estaremos na vida real, talvez, por ser um lugar muito longe, ou um lugar muito pequeno ou grande demais para ser explorado, ou até mesmo inexistente. A potencialidade da Realidade Virtual está no fato de permitir a exploração de alguns ambientes, objetos ou processos por meio da análise virtual e manipulação do próprio alvo do estudo. Nestes termos pode-se categorizar RV essencialmente em duas frentes: Realidade Virtual Imersiva (acesso ao ambiente virtual sem se isolar do mundo real) e Realidade Virtual Não-Imersiva (sistemas capazes de imergir completamente o usuário no mundo virtual).
Além desses dois principais tipos, outras formas comuns também podem ser citadas, como a Tele presença, Realidade Mista, Realidade Aumentada e Virtualidade Aumentada (KIRNER, 2005).
2.3.1 Realidade Virtual Aplicada a Educação
A Realidade Virtual vem sendo aplicada em diferentes áreas de conhecimento, como uma forma inovadora de geração de interação homem-computador (TORI, KIRNER & SISCOUTTO, 2006, p. 305).
Devido às potencialidades visualizadas pela RV, a diversidade de aplicações suportadas por esta tecnologia surge, naturalmente, em grande escala. Áreas como jogos, educação, medicina e engenharia têm sido profundamente explorados nos últimos anos (CARDOSO, et al, 2007, p. 4).
O uso de Realidade Virtual aplicada a educação está sendo intensamente trabalhado. Atualmente, as pesquisas vão à direção de como avaliar se a Realidade Virtual de fato é útil para o processo, quais seus custos, suas implicações e possíveis desvantagens.
Os indivíduos possuem maneiras diferentes de aprender, alguns preferem explorar o conteúdo, outros preferem aulas visuais, outros por formas verbais. Dentro de cada maneira pode-se aplicar o uso da Realidade Virtual.
Na figura 7 se apresenta um ambiente virtual de química onde aparece a membrana de uma folha, em que se está sendo estudado os efeitos da fotossíntese na mesma, mostrando assim a Realidade Virtual como forma de auxiliar ao processo de aprendizado (FREITAS, 2007).
Figura 7 – Ambiente Virtual de Química (RIBEIRO, 2006)
2.4 Realidade Aumentada
Segundo Azuma (1997), a Realidade Aumentada (RA) pode ser definida como uma área de pesquisa que pretende desenvolver mundos que combinem o mundo real observado pelo usuário, com uma cena virtual gerada por computador e que aumente o mundo real com informação adicional. Utilizando a tecnologia de RA é possível desenvolver um sistema que permita integrar imagens reais e virtuais, oferecendo ao usuário a possibilidade de interação com os elementos presentes no ambiente.
Figura 8 - Sistema de Realidade Virtual baseado em ambiente virtual em um monitor (AZUMA, 1997).
A RA pode ser definida como a amplificação da percepção sensorial por meio de recursos computacionais. Assim, associando dados computacionais ao mundo real, a RA permite uma interface mais natural com dados e imagens geradas por computador (CARDOSO, et. al., 2007). Desta forma, entende-se que um sistema de Realidade Aumentada deve prover ao usuário condições de interagir com estes dados e forma natural.
Realidade Aumentada é definida usualmente como a sobreposição de objetos virtuais tridimensionais, gerados por computador, com um ambiente real, por meio de algum dispositivo tecnológico (MILGRAM, et. al., 1994). Entretanto, esta conceituação é muito geral e só fica clara com sua inserção em um contexto mais amplo: o da Realidade Misturada. A figura 9 apresenta o diagrama de Realidade e Virtualidade contínua.
Figura 9- Diagrama de Realidade e Virtualidade contínua (MILGRAM, 1994).
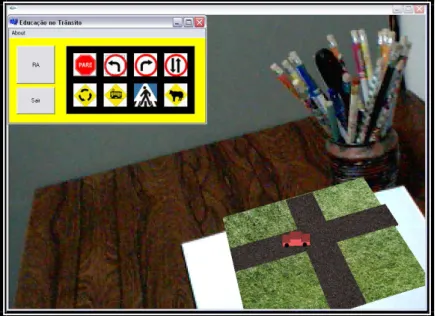
a interação do usuário, novas metodologias de ensino, para se alcançar o melhor aprendizado possível por parte dos alunos e usuários de sistemas de RA, como o apresentado na figura 10.
O sistema apresentado permite estimular o ensino de regras do trânsito a crianças de 1ª a 4ª serie do ensino básico (CHAGAS & CARDOSO, 2006).
Figura 10 – Sistema de ensino de legislação no transito usando RA (CHAGAS, CARDOSO, 2006)
Assim, de acordo com Cardoso et. al. (2007) uma das características mais importantes de Realidade Aumentada é a modificação no foco da interação homem computador.
Com o uso da RA, a interação não se dá com um único componente e/ou elemento localizado, mas com o ambiente que circunda aquele que interage. Neste sentido, Realidade Aumentada faz uso da combinação de Realidade Virtual e Mundo Real, propiciando a melhoria da percepção do usuário e sua interação (CARDOSO, et. al., 2007).
2.5 Considerações Finais
CAPÍTULO 3
3 - TRABALHOS RELACIONADOS
3.1 Introdução
Este capítulo tem o intuito de mostrar a avaliação de alguns softwares de RV e RA, verificando suas aplicações, limitações, processos de interação, e suas potencialidades como forma de auxiliar na concepção do protótipo proposto.
3.2Sistema de Experiências Físicas Instrucional em Realidade Virtual – SEFIRV
Este trabalho descreve um sistema computacional elaborado para ser ferramenta de ensino de Física do Ensino Médio, com uso de técnicas de Realidade Virtual. Por meio de estratégias psico-pedagógicas, fundamentadas no paradigma de Mapas Conceituais, o sistema simula um laboratório virtual que permite ao estudante construir seu conhecimento através da criação e análise de experimentos físicos. Este software foi desenvolvido por meio de Realidade Virtual (RV) não imersiva com o uso das linguagens VRML (Virtual Reality Modeling Language) e JavaScript. O sistema proposto possui uma interface simples, permitindo aos professores e alunos a manipulação fácil dos ambientes virtuais. Não há necessidade de conhecimentos técnicos relacionados à Informática e/ou sobre os conceitos de Física, porque foram criadas estratégias de navegação que orientam os aprendizes no processo de interação nos ambientes de aprendizagem.
Figura 11 – Arquitetura do sistema SEFIRV (SILVA, 2006)
Como limitação, os ambientes de simulação possuem uma estrutura fixa, ou seja, não permitem ao usuário, de posse de um conjunto de objetos virtuais, construir diferentes experimentos. É permitido alterar propriedades de objetos virtuais, mas não inserir ou retirar objetos. Outra limitação observada é que, em alguns experimentos, os Ambientes Virtuais oferecem pouca manipulação direta de seus objetos, o que gera dependência do painel de controle. Na figura 12 apresenta-se a página de abertura do sistema.
3.3Conservação da energia elétrica em sistemas industriais: sob a óptica da realidade virtual
Este trabalho apresenta um sistema de bombeamento, baseado em técnicas de Realidade Virtual, para aplicação no estudo e análise da eficiência energética. A idéia básica é permitir que estudantes e profissionais da área de Engenharia Elétrica possam ter acesso a um ambiente virtual de um sistema motor elétrico-bomba. Com isso este sistema cria uma ferramenta de estudo de máquinas elétricas, a fim de mostrar ao usuário um sistema onde ele possa navegar e interagir com o seu objeto de estudo. A figura 13 mostra a bomba centrífuga modelada.
Figura 13 - Bomba Centrifuga Modelada (DELAIBA et .al, 2007).
3.4Construção de um Sistema de Realidade Virtual - Sistema de monitoramento e controle utilizando-se um PIC
Neste trabalho desenvolvido por pesquisadores do curso de Engenharia Elétrica da Escola de Engenharia Mauá com ênfase em Computação, é apresentado o desenvolvimento de dispositivos e interfaces eletrônicos que controlam a interação do usuário com o mundo virtual, além da integração desses com o sistema de simulação. Permite a simulação de um passeio ciclístico utilizando a Realidade Virtual. Os sentidos do ciclista serão estimulados tanto pela visão como pela reação de um motor acoplado na roda traseira da bicicleta, que será o meio de navegação no mundo virtual. A figura 14 mostra a bicicleta utilizada no projeto de construção de um sistema de realidade virtual.
Figura 14 – Bicicleta do projeto com suporte de treino acoplado ao motor (SCHALCO et.al, 2007)
A utilização de um microcontrolador (PIC 16F877A) como elemento centralizador das principais funções do dispositivo de interação em Realidade Virtual, PIC16F877A é de essencial utilidade, pois é capaz de captar e controlar os dados dos sensores e do motor. O microcontrolador é interligado ao PC por meio da interface de comunicação (RS232 realizado pelo CI MAX232N).
Figura 15 – Ponto de vista do usuário no sistema (SCHALCO et.al, 2007).
O sistema possui um alto custo como exemplo o uso do Head Mounted Display
(HMD), por isso pode ser substituído por um monitor convencional, apenas para exibir uma imagem do mundo virtual. Além disso, à medida que se busca maior imersão do usuário no sistema, torna-se mais complexo o desenvolvimento da interface entre o usuário e o dispositivo de navegação no ambiente virtual, aumentando o custo da construção deste sistema. Assim, seria necessário utilizar outro microcontrolador.
3.5 Livro dos Sólidos Geométricos
O Livro de Sólidos Geométricos foi desenvolvido através do uso de RA com a finalidade de auxiliar alunos no aprendizado matemático (AKAGUI, 2004). Podendo desta forma ser utilizado por escolas do Ensino Médio.
Figura 16 - Visualização de Poliedros. Fonte: (AKAGUI, 2004).
As principais características deste sistema são:
Vantagens- Os marcadores são dinâmicos, ou seja, as informações sobre um determinado marcador podem ser alteradas através da placa de controle.
Desvantagens- Utilização de um marcador especial como forma de placa de controle para que os ambientes virtuais não sofram variações com o decorrer do tempo;
3.6Sistema de Medição de Movimentos por RA – SMMAR
Figura 17 - Arquitetura do Sistema SMMAR (DUARTE, 2006).
As principais limitações detectadas foram referentes aos itens que dizem respeito às questões de iluminação, ângulos e rastreamento. Na iluminação observou-se que o excesso de luz ou a falta dela pode comprometer a detecção dos marcadores. Com relação a visão da câmera, para que a abrangência da imagem capturada pela câmera tome todo o experimento colocou-se a câmera a uma distância de 2 metros em relação aos marcadores, o que degradou a qualidade das imagens capturadas, podendo também afetar o rastreamento dos dados. A figura 18 mostra os sensores e o temporizador do SMMAR.
3.7Service and Training through Augmented Reality - STAR
O STAR é um sistema de RA, desenvolvido por institutos de pesquisas europeus, como a Universidade de Genebra, e corporações americanas, como a Siemens. Segundo Badiqué e Raczynski (2002), o sistema foi projetado com finalidades industriais, permitindo que informações adicionais sejam observadas em tempo real. A informação varia de textos de ajuda simples à geometrias 3D complexas. Com a ajuda de técnicas de RA, é possível combinar estas informações de acordo com o movimento de câmeras. O resultado é uma extensão da realidade. O foco do sistema STAR é o treinamento, a documentação e o planejamento de projetos industriais. A figura 19 mostra uma imagem do funcionamento do sistema.
Figura 19- Imagem do funcionamento do sistema STAR (BADIQUÉ & RACZYNSKI, 2002)
A desvantagem deste sistema é a constante necessidade de participação de um perito que geralmente está em outro local diferente daquele onde o trabalho com o sistema está sendo efetuado. Isso ocorre geralmente para acréscimo de informações como imagens e textos, e essas informações são enviadas via rede ao laptop do trabalhador para que o mesmo decida que etapas executará em seguida, no trabalho que esteja realizando.Desta forma o processo se torna um pouco ocioso na sua conclusão.
3.8O Sistema EIC-RA
cada parte é texturizada sobre o modelo geométrico (cubo) em VRML, que é associado a um determinado marcador.
O objetivo desse sistema é estimular o raciocínio lógico-matemático e a inteligência espacial do usuário, aliado ao entretenimento, pois através da RA é possível estabelecer uma condição de interação que favoreça a motivação do usuário, a atenção e, principalmente, a retenção de informações, pois os mesmos podem estabelecer uma relação com os objetos disponíveis no ambiente virtual muito semelhante às situações reais.
A Figura 20 mostra o funcionamento deste sistema.
Figura 20: EIC: Quebra Cabeça (SISCOUTTO et. al., 2005).
Neste caso, as informações contidas em cada marcador são fixas, não havendo nenhum dinamismo na aplicação. As suas principais características são:
- Vantagens - Aumento da percepção do usuário;
- Desvantagem - Marcadores não são dinâmicos; Ambientes virtuais não se alteram.
3.9ARAS - Augmented Reality Aided Surgery
Este sistema apresenta aos profissionais de saúde uma forma de avaliar a situação do paciente, planejar ou definir a estratégia pré-operatória e possibilitar uma avaliação precisa dos resultados pós-operatórios conforme mostra a Figura 21.
Figura 21- Imagem do funcionamento do ARAS. (SPLECHTNA et al., 2002)
3.10 Considerações Finais
A Tabela 3.1 mostra algumas características dos sistemas estudados, destacando as características que interessam a pesquisa do sistema a ser proposto.
Tabela 3. 1 - Comparativa das características dos trabalhos relacionados.
Softwares Uso de RV Uso de RA Comunicação Externa
Aplicado a Educação
SEFIRV SIM NÃO NÃO SIM
Sistema de Bombeamento SIM NÃO NÃO SIM
Sistema de monitoramento e controle utilizando-se um PIC
SIM NÃO SIM SIM
Livro de Sólidos
Geométricos
SIM NÃO NÃO SIM
STAR NÃO SIM NÃO NÃO
EIC-RA NÃO SIM NÃO SIM
ARAS NÃO SIM NÃO SIM
Cada característica é melhor descrita abaixo.
Uso de Rv – Utilização da Realidade Virtual no desenvolvimento e uso do software. Uso de Ra – Utilização da Realidade Aumentada para simulação do experimento. Apresentação dos resultados do Experimento- Demonstrar os resultados dos testes feitos com o experimento.
Comunicação Externa– Integração entre o computador e o Engine físico, para simulação dos resultados.
Aplicação a Educação – Uso do software para aplicações educacionais.
CAPÍTULO 4
4
- TECNOLOGIAS E A ARQUITETURA DO
SISTEMA
4.1Introdução
A partir do estudo realizado nos capítulos anteriores, elaborou-se uma arquitetura de sistema para o estudo da visualização do campo magnético em um motor de indução monofásico, voltado para o ensino e que permita ao usuário poder interagir com a formação deste campo em Realidade Virtual ou Aumentada. Neste contexto, a escolha fica por parte do usuário, pois este protótipo tem a finalidade de mostrar as principais formações do campo magnético em um motor real e também virtual criado especificamente para ser um parceiro no ensino-aprendizagem em relação aos métodos de estudo atuais.Bem como mostrar as tecnologias envolvidas no sistema.
O estudo também visa mostrar comunicação de um motor externo com o computador, e a partir da ativação das funções deste motor demonstrar a criação da RA no mesmo e também estender à utilização deste motor para a visualização da RV, utilizando o periférico de saída(Monitor de Vídeo), pretendendo assim, mostrar as potencialidades que a RV e a RA podem ter nas diversas áreas do conhecimento.
4.2Tecnologias de Apoio
Neste trabalho, foram utilizadas tecnologias relacionadas com o desenvolvimento de soluções de RV não imersiva e RA de baixo custo, tais como:
Opengl
Biblioteca ARToolKit Visual C ++ 5.0
Linguagem C PIC para configuração da PIC 18F2550. 3D S Max 5.0
PIC
Físico, realizar a entrada de informações relacionados ao experimento, e transformá-lo em um resultado esperado na Realidade Aumentada, e também com a modelagem desse Engine Físico e a estruturação de suas funcionalidades, buscar comprovar esses resultados também na Realidade Virtual.
4.2.1 OpenGl
Atualmente, OpenGL é reconhecida e aceita como um padrão API(Application Programming Interface) para desenvolvimento de aplicações gráficas 3D em tempo real (RIBEIRO, 2006). Normalmente, se diz que um programa é baseado em OpenGL ou é uma aplicação OpenGL, o que significa que ele é escrito em alguma linguagem de programação que faz chamada a uma ou mais bibliotecas OpenGL (PINHO, 2004).
Por ser portável, OpenGL não possui funções para gerenciamento de janelas, interação com o usuário ou arquivos de entrada/saída. Não existe um formato de arquivo OpenGL para modelos ou ambientes virtuais. A biblioteca GLUT (OpenGL Utility Library) é que fornece várias funções para modelagem, tais como superfícies quádricas, e curvas e superfícies NURBS (Non Uniform Rational BSplines)(WOO, 1999; WRIGHT, 2000). Essa biblioteca trabalha em conjunto com outra biblioteca chamada de GLUI (Graphic Library User Interface) que é uma biblioteca em linguagem C++ que provê ao usuário a criação de interfaces e também controles bem como, botões, caixa de textos e funções específicas que operam em conjunto para o desenvolvimento de aplicações em OpenGL.
4.2.2 ArtoolKit
O ARToolKit é uma biblioteca projetada em linguagem C que permite aos programadores desenvolver facilmente aplicações de RA. Uma das partes mais difíceis do desenvolvimento de uma aplicação em Realidade Aumentada é calcular precisamente o ponto de vista do usuário em tempo-real para que imagens virtuais estejam exatamente alinhadas com os objetos do mundo real.
Desta forma, o ARToolKit trabalha com a biblioteca Gráfica OpenGL para a renderização dos objetos virtuais e para a criação da janela gráfica onde é mostrado os objetos virtuais da cena em Realidade Aumentada e, ainda, trabalha com as premissas do OpenGL quando se trata de criar interações, animações, transformações geométricas, iluminação e criação menus. A figura 22 mostra a análise da imagem pelo ARToolKit.
Figura 22: Análise da imagem pelo ARToolKit (KATO, BILLINGHURST ET AL., 2005).
4.2.3 Microsoft Visual Studio C++
Figura 23: Imagem do ambiente visual C++.
4.2.4 Linguagem C
Foi utilizado o programa C para programação da PIC, que é microcontrolador responsável por ser o elo de ligação entre o Engine Físico(Motor), a placa de protoboard e seus dispositivos eletrônicos aonde se encontra a PIC , e o computador, onde este controle executado pela PIC, gera a comunicação entre o mundo real que está no Engine Físico e o Virtual que surgirá no ambiente do computador.
4.2.5 3Ds Max 5.0
Foi Utilizado o 3ds Max para a modelagem dos ambientes virtuais, e posterior exportação para biblioteca opengl, para finalização da modelagem com as interações.
4.2.6. PIC
Figura 24 – Microcontrolador USB PIC 18F2550
4.3Arquitetura Proposta do Sistema
A arquitetura do sistema proposto é feita de modo que o usuário não tenha problemas na interpretação dos passos a serem tomados para poder executar o protótipo em suas potencialidades. Na figura 25 é mostrado a visão geral da arquitetura do sistema:
Figura 25: Arquitetura Proposta do Sistema.
Usuário – Participante do processo de visualização do Campo Magnético, responsável por iniciar todo o uso do sistema, para obtenção de um resultado esperado, ou pelo menos satisfatório, no qual o mesmo tem a opção de escolha de visualização do Campo em Realidade Virtual ou Realidade Aumentada.
Engine Físico - O Engine físico é o sistema responsável por processar as informações obtidas pela interação do usuário, adicionando-lhe os fenômenos físicos
Circuito de Controle
+
PIC (Microcontrolador)
G U I
R V R A
esse sistema, pois envia dados para o sistema de controle (PIC) e para o sistema gráfico, fazendo com que o usuário possa perceber:
A resposta dada pelo motor que acelera ou diminui a velocidade; A representação do campo magnético no sistema gráfico;
As mudanças dos ângulos de Visualizações do Campo na RV;
O aparecimento do campo magnético, junto ao marcador no motor real. Possibilidade de alteração on-line do motor RV para RA.
Circuito de Controle- Placa controladora onde estão instalados os componentes eletrônicos necessários para a comunicação entre a placa, a PIC, o Engine Físico e o computador.São formados basicamente por transistores, diodos, capacitores, resistência entre outros.
PIC- Microcontrolador responsável por servir como ponte entre o Engine físico e os elementos sensores e atuadores. Ele é considerado o elemento central do projeto pois a comunicação entre Engine e o computador, somado as interações que serão representadas no ambiente virtual, e ambiente real, terão que obrigatoriamente ter participação desse componente. PIC 18F2550.
GUI - O módulo GUI - Interface Gráfica do Usuário foi uma nova camada desenvolvida no ambiente Borland C++ Builder e GLUT e que possibilita a comunicação do usuário com todos os outros módulos desenvolvidos. A utilização de componentes, tais como menus, botões, caixa de texto, permitem aos usuários a criação, inserção de marcadores e associação entre marcadores e objetos virtuais em VRML, possibilitando o desenvolvimento de aplicações em RA de forma mais rápida e intuitiva.
RV - Realidade Virtual. É o ambiente de Realidade Virtual, onde será mostrado o motor virtual e as informações repassadas através da PIC pelo Circuito de controle que serão apresentadas no Ambiente Virtual, com as alterações feitas no motor real.
4.4Visão Geral do funcionamento do sistema com o diagrama de blocos
A figura 26 mostra uma visão geral do funcionamento do sistema através de um diagrama de blocos, onde são mostrados os passos principais para o funcionamento do protótipo, e o uso dos ambientes de RV e RA.
Figura 26- Diagrama em blocos do sistema
4.5Considerações Finais
CAPÍTULO 5
5
- DESENVOLVIMENTO DO SISTEMA
5.1 Introdução
Neste capítulo, são apresentados os detalhes de implementação do protótipo bem como as linguagens de programação, bibliotecas e modeladores geométricos de objetos gráficos, além dos casos de uso do sistema PVVAC (Protótipo de Visualização Virtual e Aumentada do Campo Magnético). Também será apresentado o funcionamento do sistema, juntamente com a descrição do estudo de caso usado.
5.1.1 Caso de Uso do Sistema PVVAC
A Figura 27 mostra o diagrama de Casos de Uso do sistema desenvolvido.
Figura 27: Diagrama de Use Case. (Visão Geral)
Tabela 5.1 - Relação dos Casos de Uso do Sistema PVVAC.
Func. Nome da Funcionalidade Relação dos Casos de Uso
1 Ativar o Ambiente de RV Abertura do Ambiente de RV para a
Interação
2 Visualizar o Campo no Motor RV Visualização do Campo Magnético no
Visualizar o campo no motor RV
Visualizar o campo no motor Real Ativar o
Ambiente de RV
Ativar o Ambiente de RA
<<Include>> <<Include>>
Usuário
Motor Virtual.
3 Ativar o Ambiente de RA Abertura do Ambiente de RA para a
Interação
4 Visualizar o Campo no Motor Real Visualização do Campo Magnético no Motor Real.
A tabela nos mostra os passos a serem tomados pelos usuários quando os mesmos forem utilizar o sistema, nos quais são descritas os principais eventos que ocorrem durante o seu uso, destacando-se em primeiro lugar a ativação do ambiente de Rv que irá mostrar o ambiente virtual proposto do motor para a visualização e uso do ambiente por parte do usuário. A segunda funcionalidade da tabela e apresentar ao usuário a visualização do campo magnético virtual que irá aparecer a partir do acionamento do motor real no seu protótipo virtual. A terceira funcionalidade é para a ativação do ambiente de RA, que irá fazer com que o ambiente virtual ocupe espaço no ambiente real que é o motor real, onde a visualização do Campo Magnético em RA será visualizada a partir da quarta funcionalidade da tabela. Todas as relações dos casos de uso do sistema PVVAC serão demonstrados através de casos de usos de cada funcionalidade, descrevendo os atores envolvidos, pré-condição de uso do sistema, a descrição do caso, bem como a Pós-condição de uso do sistema.
5.1.2 Caso de Uso: Ativar o ambiente de RV.
Figura 28: Use case: Ativar o Ambiente de RV.
Tabela 5.2 - Descrição do Caso de Uso ‘Ativar o ambiente de RV’.
Nome do Caso de Uso:
Ativar o ambiente de RV
Funcionalidade:
Abertura do Ambiente de RV para a Interação
Pré-Condição: O motor real deverá estar interligado ao computador através da protoboard.
Descrição do Caso: Selecionar o ambiente de RV para ser trabalhado.
Pós-Condição: Comunicação estabelecida entre o protótipo e o computador.
5.1.3 Caso de Uso: Visualizar o campo no motor RV.
Figura 29: Use case: Visualizar o Campo no motor RV.
Tabela 5.3 - Descrição do Caso de Uso ‘Visualizar o campo no motor RV’.
Nome do Caso de Uso:
Visualizar o campo no motor RV
Funcionalidade:
Visualização do Campo Magnético no Motor Virtual.
Ator Envolvido: Usuário (Professor e alunos que irão trabalhar com o sistema).
Pré-Condição: O sistema em RV deverá estar ativado no computador.
Descrição do Caso: Ativar a visualização do campo no motor RV.
Pós-Condição: Visualização do campo magnético virtual no motor em RV.
Tabela 5.4 - Descrição do Caso de Uso ‘Ativar o ambiente de RA’.
Nome do Caso de Uso:
Ativar o ambiente de RA
Funcionalidade:
Abertura do Ambiente de RA para a Interação
Ator Envolvido: Usuário (Professor e alunos que irão trabalhar com o sistema).
Pré-Condição: O motor real deverá estar interligado ao computador através da protoboard.
Descrição do Caso: Selecionar o ambiente de RA para ser trabalhado.
Pós-Condição: Uso do ambiente de Realidade Aumentada pertencentes ao Protótipo.
5.1.5 Caso de Uso: Visualizar o campo no motor Real.
Figura 31: Use case: Visualizar o campo no motor Real.
Tabela 5.5 - Descrição do Caso de Uso ‘Visualizar o campo no motor real’.
Nome do Caso de Uso:
Estabelecer o modo de interação
Funcionalidade:
Escolha do Ambiente a ser trabalhado
Ator Envolvido: Usuário (Professor e alunos que irão trabalhar com o sistema).
Pré-Condição: O Ambiente de Realidade Aumentada deverá estar ativada no computador.
Descrição do Caso: Ativar a visualização do campo no motor Real.
5.2Ferramentas de Programação Utilizadas
Neste trabalho optou-se por utilizar como ferramenta de programação para o sistema, a linguagem Visual Studio C ++ 5.0, pelo seguinte motivo:
Ter boa quantidade de recursos, com funcionalidades similares às já existentes em outras linguagens e novas funcionalidades, para que o usuário possa manipular, sem dificuldades objetos virtuais em OpenGl ou DirectX;
5.3 Composição do Motor Elétrico e Modelagem Utilizada
Os principais elementos que compõe o motor são:
- Estator- é a parte de um motor ou gerador elétrico que se mantém fixo a carcaça e tem por função conduzir energia elétrica às vezes para rotacionar, e outras vezes transformar a energia cinética do induzido em energia elétrica.
- Bobinas - Circulo formado de fios, ligados a uma corrente, que geram um campo eletromagnético.
- Rotor - é tudo que gira em torno de seu próprio eixo produzindo movimentos de rotação. Qualquer máquina rotativa, como turbinas, compressores, redutores, entre outros, possuem eixos rotativos apoiados em mancais de deslizamento, rolamento ou magnéticos.
- Pequeno-Motor – responsável por transferir para a placa de comunicação com o computador a velocidade do motor.