Instrumentação de um Sistema de
Recolha Selectiva de Resíduos
Por
Agostinho Seixas de Azevedo
Orientador:Pedro Miguel Mestre Alves da Silva
Co-orientador:Carlos Manuel José Alves Serôdio
Dissertação submetida à
UNIVERSIDADE DE TRÁS-OS-MONTES E ALTO DOURO para obtenção do grau de
MESTRE
em Engenharia Electrotécnica e de Computadores, de acordo com o disposto no DR – I série–A, Decreto-Lei n. 74/2006 de 24 de Março e no
Regulamento de Estudos Pós-Graduados da UTAD DR, 2. série – Deliberação n. 2391/2007
Orientação Científica :
Pedro Miguel Mestre Alves da Silva
Professor Auxiliar do Departamento de Engenharias da Escola de Ciências e Tecnologia da Universidade de Trás-os-Montes e Alto Douro
Carlos Manuel José Alves Serôdio
Professor Auxiliar com Agregação do Departamento de Engenharias da Escola de Ciências e Tecnologia da Universidade de Trás-os-Montes e Alto Douro
À minha Família, em especial à minha mãe Maria Helena
Sousa Seixas Azevedo e ao meu pai Nelson Rui de
Azevedo.
Agradecimentos
Quero agradecer em primeiro aos professores Pedro Miguel Mestre Alves da Silva e Carlos Manuel José Alves Serôdio pela oportunidade que me concede-ram de realizar a presente dissertação sob suas orientações e pela permanente disponibilidade para retirar dúvidas, efectuar revisões e sugestões do trabalho desenvolvido, não posso também deixar de agradecer o apoio e incentivo moral concedido nos momentos mais complicados ao longo do desenrolar da disserta-ção.
Aos meus pais, pela formação pessoal e por tudo que fizeram para que pudesse efectuar este percurso académico. Sem a sua contribuição, não teria sido possível a concretização deste projecto de vida. Obrigado pelo apoio e preocupação que sempre demonstraram.
Aos meus primos por aquilo que representam, sei que estão sempre presentes quando mais precisamos.
Aos meus amigos José Ribeiro e Nuno Cibrão por estes bons anos de amizade, companheirismo e camaradagem, por tudo o que fizeram pela minha pessoa ao longo deste percurso académico assim como tantos outros colegas que sempre me apoiaram.
Finalmente gostaria de agradecer à Universidade de Trás-os-Montes e Alto Douro por me ter concedido a oportunidade de realizar o percurso académico.
Instrumentação de um Sistema de Recolha Selectiva de Resíduos
Agostinho Seixas de Azevedo
Submetido na Universidade de Trás-os-Montes e Alto Douro para o preenchimento dos requisitos parciais para obtenção do grau de
Mestre em Engenharia Electrotécnica e de Computadores
Resumo — A crescente necessidade de uma maior eficiência nos processos pro-dutivos de um sector de actividade, por exemplo a recolha selectiva de resíduos, torna evidente a importância de se possuir um sistema de controlo que possa fornecer informações essenciais para o entendimento e aperfeiçoamento da acti-vidade realizada.
Actualmente a falta de dados neste sector de actividade, dificulta todo o processo de optimização de rotas de recolha dos resíduos, aumentando assim o custo de obtenção dos mesmos. Tradicionalmente a recolha deste tipo de dados é efectu-ada manualmente, através de um formulário que os funcionários que efectuam a recolha têm de preencher.
É objectivo deste trabalho implementar um sistema de aquisição de dados, que de uma forma automática seja capaz de avaliar o grau de enchimento de cada ecoponto e registar as horas de chegada e partida dos veículos de recolha.
Este sistema de aquisição de dados é um sistema de baixo custo, possui comu-nicação sem fios e é autónomo a nível energético, sendo alimentado por painel solar e baterias recarregáveis. Os desenvolvimentos tecnológicos, que ocorreram nesta área nomeadamente na área dos microcontroladores, em muito contribuí-ram para a possibilidade de criar sistemas deste tipo, com um elevado grau de fiabilidade e robustez.
O sistema de aquisição de dados, construído utiliza ultra-sons para determinar o grau de enchimento, este é determinado através da análise do tempo de voo. Para as comunicações com o veículo de recolha, é utilizado um protocolo construído para o efeito, que utiliza o IEEE802.15.4 como protocolo de níveis 1 e 2.
Palavras Chave: Sistema de aquisição de dados, grau de enchimento, sensor de ultra-som, tempo de voo, rede de sensores sem fio, IEEE802.15.4.
Instrumentation of a System of Selective Gathering of Residues
Agostinho Seixas de Azevedo
Submitted to the University of Trás-os-Montes and Alto Douro in partial fulfillment of the requirements for the degree of Master of Science in Electrical and Computers Engineering
Abstract —The increasing need for a greater efficiency in the productive proces-ses of an activity sector, for example the selective gathering of residues, makes evident the importance of having a control system that can supply essential pro-cess information, enabling the understanding and improvement of the carried activity.
Currently the lack of data in this activity sector, makes the residues gathering route optimization difficult, increasing the cost of data collection.
Traditionally this type of data is collected by hand using a form that the em-ployees, who make the residues gathering must fill.
The objective of this work is to implement a data acquisition system, which can automatically measure the filling level of each recycling bin and register the arri-val and departure time of the gathering vehicles.
It is a low cost system, with wireless communication and its autonomous at energy levels. It is powered by solar panels and rechargeable batteries. The tech-nological developments, that had occurred in the microelectronics area, specifi-cally in microcontrollers, made possible to create this type of systems, with a high degree of reliability and robustness.
The presented data acquisition system uses ultrasounds to measure the filling level, which determined through the analysis of the time of flight. For the com-munications with the gathering vehicle, it was developed a comcom-munications pro-tocol, this protocol uses IEEE802.15.4 as protocol in the two lower layers.
Key Words:data acquisition systems, recycling bin filling level, recycling bin fil-ling level, time of flight, wireless sensor networks , IEEE802.15.4.
Conteúdo
1 Introdução 1
1.1 Contexto e Motivação . . . 1
1.2 Objectivos . . . 3
1.3 Organização da Dissertação . . . 4
2 Redes de Sensores sem Fios 5 2.1 Contexto Actual . . . 5
2.2 Características das Redes de Sensores . . . 7
2.3 Métricas de Desempenho . . . 9 2.4 Classificação e Arquitecturas . . . 10 2.5 Planos de Gestão . . . 14 2.6 Arquitectura Funcional . . . 15 2.7 Segurança . . . 17 2.8 Protocolos de Comunicação . . . 19 2.8.1 Protocolo DD . . . 19 2.8.2 Protocolo SPIN . . . 20 2.8.3 Protocolo SAR . . . 21 2.8.4 Protocolo LEACH . . . 22 2.8.5 Protocolo TEEN . . . 22 xiii
2.8.6 Protocolo APTEEN . . . 23 2.8.7 Protocolo SHARP . . . 23 2.8.8 Protocolo PEGASIS . . . 24 2.9 Norma IEEE 802.15.4 . . . 25 2.9.1 Camada Física . . . 27 2.9.2 Sub-camada MAC . . . 28 2.9.3 Tipos de Dispositivos . . . 30 2.9.4 Topologias de Rede . . . 32 3 Sensores de Ultra-Som 35 3.1 Medição de Distâncias com Ultra-sons . . . 36
3.2 Modelo Físico de um Sensor de Ultra-som . . . 38
3.3 Características . . . 41
3.4 Métodos para Determinar o TOF . . . 43
3.4.1 Método Simples de Thresholding . . . 44
3.4.2 Método de Ajuste de Curva . . . 45
3.4.3 Método Janela Deslizante . . . 46
3.4.4 Método de Detecção de Correlação Óptima . . . 46
3.4.5 Resumo e Ilações dos Métodos . . . 47
4 Concepção 49 4.1 Determinação do Grau de Enchimento . . . 49
4.2 Transmissão de Dados . . . 50
4.3 Sistema de Aquisição de Dados . . . 51
5 Sistema de Aquisição e Transmissão de Dados 53 5.1 Instrumentação . . . 53
Conteúdo xv
5.1.1 Planificação e Distribuição dos Sensores . . . 54
5.1.2 Transmissão de Ultra-sons . . . 55
5.1.3 Recepção dos Ultra-sons . . . 57
5.2 Alimentação e Gestão de Energia . . . 61
5.2.1 Controlo de Carga da Bateria . . . 62
5.2.2 Alimentação do Sistema . . . 65
5.3 Módulo de Comunicação . . . 67
5.3.1 Módulos Transceivers . . . 67
5.3.2 Protocolo de Comunicação . . . 70
5.3.3 Estrutura das Mensagens . . . 74
5.4 Unidade Central de Processamento . . . 79
5.4.1 Especificações do Microcontrolador . . . 81
6 Resultados e Conclusões 85 6.1 Testes do Trabalho Realizado . . . 85
Lista de Figuras
1.1 Etapas fundamentais no processamento de dados. . . 2
2.1 Estrutura de um Nó de uma rede de sensores. . . 7
2.2 Comunicação multihop dos sensores na rede. . . 13
2.3 Camadas e Planos da Arquitectura de uma RSSF. . . 14
2.4 Protocolo Difusão Direccionada. . . 20
2.5 Protocolo SHARP. . . 24
2.6 Funcionamento do protocolo PEGASIS. . . 24
2.7 Organograma dos padrões IEEE 802. . . 26
2.8 Arquitectura de LR-WPAN . . . 27
2.9 Formato dos pacotes transmitidos na camada física . . . 28
2.10 Beacons . . . 29
2.11 superframes com período inactivo . . . 30
2.12 Topologias da rede. . . 32
3.1 Morcego a perseguir uma presa. . . 36
3.2 Funcionamento do sensor de ultra-sons. . . 38
3.3 Transdutor Electrostático da Polaroid . . . 39
3.4 Estruturas utilizadas nos transdutores piezoeléctricos. . . 40
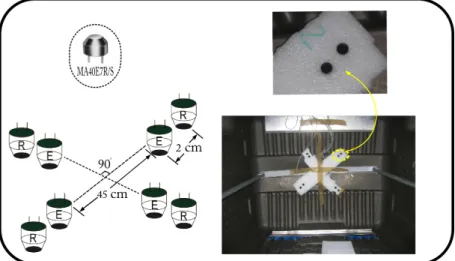
3.5 Constituição do sensor de ultra-som MURATA (MA40E7S/R). . . . 40 xvii
3.6 Forma polar da energia irradiada pelos transdutores MURATA. . . 41
3.7 Reflexão especular/Reflexão difusa. . . 43
3.8 Envolvente do eco de um sinal de ultra-som. . . 44
4.1 Grau de enchimento. . . 50
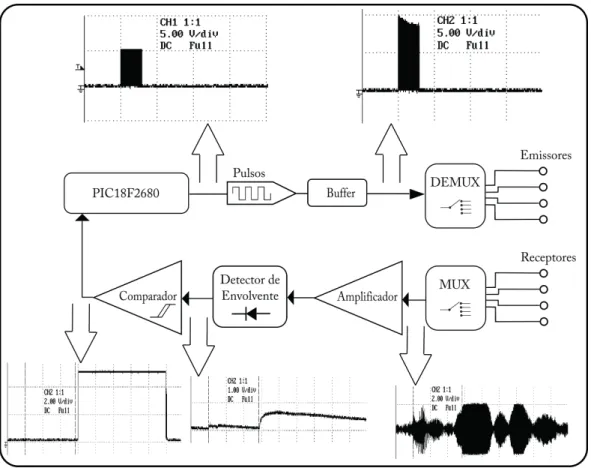
4.2 Diagrama funcional do sistema de recolha e transmissão de dados. 51 5.1 Diagrama funcional do bloco de instrumentação. . . 54
5.2 Plano de distribuição dos sensores. . . 55
5.3 Circuito do emissor. . . 56
5.4 Placa do circuito impresso do emissor. . . 57
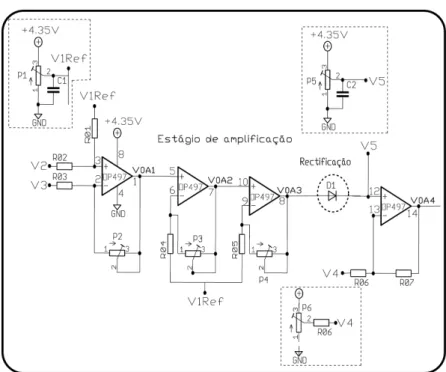
5.5 Circuito do receptor. . . 57
5.6 Segmento do estágio de amplificação. . . 59
5.7 Comparador . . . 60
5.8 Placa do circuito impresso do receptor. . . 61
5.9 Diagrama funcional do módulo de gestão de energia. . . 63
5.10 Circuito de carga. . . 64
5.11 Circuito de alimentação para os diferentes segmentos do sistema. . 66
5.12 Placa do circuito impresso do controlador de carga da bateria. . . . 66
5.13 Tipo de antena dos módulos transceiver XBee . . . 68
5.14 Vista frontal e lateral do transceiver XBee/XBee Pro . . . 69
5.15 Bits a serem transmitidos pela UART através do módulo RF. . . 69
5.16 Circuito de comunicação Microcontrolador/XBee. . . 70
5.17 Placa do circuito impresso da comunicação Microcontrolador/XBee. 70 5.18 Soluções para a estruturação da rede. . . 71
5.19 Diagrama de estados 1aSolução. . . . 72
Lista de Figuras xix
5.21 Sequência das mensagens. . . 75
5.22 Mensagem de procura de ecoponto. . . 75
5.23 Resposta à Mensagem de procura de ecoponto. . . 76
5.24 Mensagem de pedido de dados. . . 77
5.25 Mensagem de envio de dados. . . 78
5.26 Mensagem de disconnect. . . 79
5.27 Esquemático da unidade central de processamento. . . 80
5.28 Ciclo de funcionamento e tratamento do sinal. . . 81
5.29 1o método de aquisição de dados. . . . 83
5.30 2o método de aquisição de dados. . . . 84
6.1 Ruído causado pela proximidade dos sensores. . . 86
6.2 Forma de onda do eco do primeiro método . . . 87
6.3 Forma de onda do eco do segundo método, 0% . . . 89
6.4 Forma de onda do eco do segundo método, 25% . . . 90
6.5 Forma de onda do eco do segundo método, 50% . . . 91
6.6 Forma de onda do eco do segundo método, 75% . . . 92
6.7 Forma de onda do eco do segundo método, 100% . . . 93
6.8 Distribuição não uniforme do cartão no ecoponto . . . 94
6.9 Cartão na diagonal do ecoponto . . . 95
Lista de Tabelas
5.1 Código de identificação dos parâmetros do campo dados. . . 77
5.2 Código de identificação dos parâmetros do campo dados. . . 78
5.3 Código de identificação do grau de enchimento. . . 78
5.4 Funções atribuídas aos pinos do microcontrolador PIC. . . 82
5.5 Estrutura de selecção para aquisição de dados. . . 83
6.1 Comparação dos métodos para o teste 1 . . . 93
6.2 Comparação dos métodos para o segundo teste. . . 95
Capítulo 1
Introdução
1.1
Contexto e Motivação
Com a evolução na área tecnológica no início da década de 1980 fez com que as empresas tivessem a necessidade de tomar decisões estratégicas, de uma forma mais rápida devido ao crescente aumento de competitividade. As empresas tive-ram que organizar as suas informações e desenvolver processos para tornar mais ágil a consulta das mesmas e a execução de medidas estratégicas [1].
A crescente necessidade de uma maior eficiência nos processos produtivos de um sector de actividade, devido principalmente ao aumento da concorrência, torna evidente a importância de se possuir um sistema de controlo que possa fornecer informações essenciais para o entendimento e aperfeiçoamento das suas activi-dades realizadas.
Saber definir o que deve ser medido e avaliado nas diferentes actividades reali-zadas por uma empresa, não é uma tarefa fácil. Determinar quais as medidas que devem ser realizadas depende da complexidade do processo que se deseja avaliar e da sua importância em relação às metas estabelecidas [2].
Muitas são as variáveis que podem ser medidas e avaliadas, por isso, saber dis-tinguir quais são as essenciais, depende muito do bom senso e experiência dos que gerem e tomam decisões.
As métricas devem ser utilizadas para uma maior integração entre as diferen-tes áreas de actuação da empresa, pois, os dados retirados de uma determinada
área podem ser de grande importância para outra, além de todos os dados serem essenciais aos administradores do sistema. A figura 1.1 mostra as etapas funda-mentais no processamento dos dados.
Figura 1.1: Etapas fundamentais no processamento de dados.
Um bom sistema de informação permite orientar e facilitar a tomada de decisão nos três níveis de responsabilidade: operacional, táctico e estratégico. Essa infor-mação tem de ser obtida mediante um custo razoável, para além de ser precisa, concisa, simples e oportuna.
Na sociedade comercial actual é realizado um trabalho árduo para conseguir mol-dar, da melhor forma, as potencialidades oferecidas pelo aumento e desenvolvi-mento tecnológico, no intuito de melhorar a performance de toda uma empresa. Com o factor produtividade/lucro a aumentar de importância na economia ac-tual, a investigação e desenvolvimento tecnológico tem vindo a aumentar expo-nencialmente de forma a dar resposta ao exigente mercado.
Com o avanço tecnológico, o homem começa a ser remetido para um papel de planeamento de tarefas, recolha e estudo da informação recolhida. Com isto, ele torna-se responsável pela tomada de decisões e controlo.
A árdua tarefa de adaptar-se às diversas variações do mercado, requer, além da revisão das práticas e procedimentos de actuação, a disposição de informações devidamente incrementadas, de forma a ser possível fazer um estudo estatístico para melhorar e aumentar a eficiência do serviço.
Para empresas do sector de recolha de resíduos, em que a necessidade de sa-ber informação específica sobre o local, horas a que existe um maior índice de fluxo aos seus locais de recolha, tipo de material a ser recolhido, grau de enchi-mento de cada dispositivo de armazenaenchi-mento (ecoponto). Todos estes dados são de enorme utilidade para este sector de actividade, onde se promove a recolha selectiva de resíduos por diversos locais.
1.2. Objectivos 3
Este ramo de empresas vê-se a braços com uma grande dificuldade na obtenção de dados específicos relacionados com o grau de enchimento dos locais de reco-lha de resíduos, não conseguindo assim projectar uma rota eficiente, de forma a diminuir os custos de cada operação de recolha, limitando-se na realidade a per-correr todos esses locais no intuito de recolher os resíduos existentes, que podem por vezes nem existir, daí a necessidade desse tipo de dados para projectar novas rotas e horários de recolha.
Com o acesso a este tipo de dados é possível fazer um tratamento estatístico da informação e executar os controlos de comportamento e demanda dos serviços, fazer projecções de ciclos de recolha, desenvolver programas de ampliação e pro-jectos de expansão.
1.2
Objectivos
O objectivo deste trabalho é desenvolver um sistema de aquisição de dados autó-nomo para solucionar o problema da falta de dados sobre o grau de enchimento dos ecopontos para este sector de actividade. Este sistema divide-se em três par-tes essencialmente, que são a obtenção do grau de enchimento do ecoponto, fazer a detecção da aproximação do veículo de recolha para lhe enviar os dados e a transmissão dos mesmos através de um método de comunicação sem fio.
Todo o trabalho desenvolvido é assente no objectivo principal do sistema, de-terminar o grau de enchimento do ecoponto, que foi conseguido recorrendo ao sensor de ultra-som.
Após a recolha dos dados é necessário conseguir entregar os mesmos ao utiliza-dor, assim sendo foi embutido no sistema um módulo de comunicação, este vai estabelecer com o veículo de recolha um canal de comunicação.
A gestão de todos os processos do sistema é feita por um microcontrolador, este vai ser a unidade central de processamento, ele controla e processa todo o sistema de aquisição de dados e posterior envio, possuindo todo o programa funcional e protocolo de comunicação com o veículo de recolha.
1.3
Organização da Dissertação
Esta dissertação é composta por 6 capítulos sendo o primeiro, o presente, de in-trodução.
As principais características das redes de sensores sem fio são apresentadas no capítulo 2, em que é abordado em especial a norma IEEE802.15.4.
O estudo do sensor de ultra-som, princípio de funcionamento, é explicado no capítulo 3, onde também é feita uma abordagem às suas principais vantagens e desvantagens e para finalizar foi realizada uma análise e comparação das dife-rentes técnicas para determinar o tempo de voo (TOF).
O capítulo 4 explica como foi projectada a concepção de todo o sistema de aqui-sição e transmissão de dados do ecoponto.
O capítulo 5 é dedicado ao desenvolvimento dos módulos do sistema, desde a aquisição dos dados até a sua transmissão para uma posterior análise do utiliza-dor, o modo como é alimentado o dispositivo de forma a torná-lo autónomo e o funcionamento da unidade central de processamento.
Por fim, no capítulo 6 são apresentados os testes e resultados do trabalho reali-zado e conclusões relativamente aos objectivos inicialmente traçados.
Capítulo 2
Redes de Sensores sem Fios
2.1
Contexto Actual
Com o desenvolvimento das novas tecnologias, a proliferação do uso das sedes de sensores sem fios aumentou exponencialmente, a evolução dos microprocessa-dores veio também contribuir em muito para o desenvolvimento de novas aplica-ções (como novos materiais de sensoriamento, micro sistemas electromecânicos (MEMS -Micro Electro-Mecanical Systems)) . A comunicação sem fio tem estimu-lado o desenvolvimento e o uso de sensores "inteligentes"em áreas ligadas ao controlo e monitorização industrial, automação residencial, sensoriamento, pro-cessos físicos, químicos, biológicos, entre outros.
Hoje em dia é frequente ter num único chip vários sensores, que são controlados pela funcionamento lógico do circuito integrado, com uma interface de comuni-cação sem fio. Normalmente o termo "sensor inteligente"é aplicado ao chip que contém um ou mais sensores com capacidade de processamento de sinais e co-municação de dados.
Estes por envolverem de certa forma o sensoriamento, ficaram conhecidos por Redes de Sensores Sem fio (RSSF) ou Redes Pessoais Sem Fio de Baixas Taxas (Low-Rate Wireless Personal Area Networks - LR-WPANs), devido às baixas ta-xas de transmissão, ao curto alcance e à ausência de infra-estrutura pré-existente. Por norma estas redes possuem um grande número de Nós distribuídos, apresen-tam restrições de energia, e devem possuir mecanismos para auto configuração e adaptação, devido a problemas como falhas de comunicação e perda de Nós.
O interesse na área de redes de sensores sem fio tem aumentado bastante, tanto no âmbito da investigação, como em sectores comerciais. Os interesses comerci-ais reflectem-se nos investimentos feitos por empresas que começam a oferecer soluções em hardware e software.
Segundo um estudo feito pela revista Globalfuture,estes classificaram as RSSF como uma das dez tecnologias emergentes a nível mundial [3].
Apesar das vantagens apresentadas, o desenvolvimento de redes de sensores sem fios encontra alguns desafios no projecto de hardware, protocolos de comunicação e aplicações. Alguns desses são:
• Aumentar o tempo de vida da rede;
• Projectar mecanismos inteligentes para recolha de dados; • Controlar a variação frequente da topologia da rede;
• Controlar a comunicação em difusão (broadcast), ao contrário de ponto-a-ponto, como nas redes convencionais;
• Conseguir lidar com as limitações de potência, memória e processamento; • Projectar sistemas de tolerância a falhas, muito comuns em sensores;
• Saber lidar com a ausência de uma identificação global (ID) dos sensores, para evitar um overhead grande;
• Garantir conectividade entre os Nós;
• Projectar sistemas capazes de se adaptar a novas condições ambientais.
Apesar de alguns casos particulares das redes de sensores, um Nó Sink, em regra, tem as mesmas características para todas as redes, sendo constituído por cinco componentes principais, ilustrados na figura 2.1, unidade de processamento, uni-dade de memória, emissor-receptor, sensores e bateria.
A esse Nó podem-se ainda adicionar outros componentes, como por exemplo um dispositivo que permita a mobilidade ou um sistema de localização.
2.2. Características das Redes de Sensores 7
Figura 2.1: Estrutura de um Nó de uma rede de sensores.
2.2
Características das Redes de Sensores
As principais características das redes de sensores são o sensor, o observador e o fenómeno/processo a caracterizar. O sensor implementa a monitorização fí-sica de um acontecimento, a sua variação, transmitindo através da comunicação sem fios relatórios da variação registrada. Ele produz respostas a mudanças nas condições físicas, tais como temperatura, humidade, etc.
Os dispositivos de detecção podem ter características e complexidades diferentes, de acordo com a necessidade da aplicação, podendo diminuir a detecção com o aumento da distância, ou melhorar o tempo que o sensor fica exposto para a recolha de informações.
Apesar da organização de uma rede distribuída de sensores estar intimamente relacionada com a aplicação específica que se pretende desenvolver, pode-se re-lacionar algumas características comuns a praticamente todas as RSSF:
• Endereçamento dos sensores, dependendo da actividade pretendida para cada sensor, relativa ao tipo de função a que se destina, este pode ser en-dereçado directamente ou não, dependendo se é do nosso interesse saber informações do local e dos dados específicos de um determinado sensor ou se pretendemos um valor geral recolhido e por uma rede de sensores, em que não é necessário o conhecimento especifico de um só mas sim de um todo.
• Agregação dos dados, esta característica indica a capacidade de uma RSSF de agregar ou sumarizar dados recolhidos pelos sensores.
• Mobilidade dos sensores, os Nós sensores podem ser fixos ou móveis, na actualidade a grande maioria dos sensores são estáticos, no entanto espera-se que num futuro próximo a mobilidade espera-seja um aspecto importante em RSSF, uma vez que o movimento dos sensores permitirá um aumento da capacidade de monitorizar e da eficácia da comunicação entre Nós, esta servirá de base para o desenvolvimento de novas aplicações.
• Cobertura extensa e facilidade de instalação, esta característica é generali-zada em todas as redes de sensores sem fios, pois estas são redes de larga escala e, geralmente, o número de Nós sensores pode ultrapassar em várias ordens de grandeza o número de Nós de redes sem fio tradicionais. Assim, a cobertura de uma determinada área é bastante flexível e pode ser ajustada convenientemente inserindo novos Nós ou movendo os existentes.
• Auto-organização, é necessário existir mecanismos de auto-organização para que a rede continue a executar a sua função, por vezes ocorrem problemas e é necessário que a rede tenha essa capacidade.
Os problemas que geralmente ocorrem são:
1. Os sensores podem ser perdidos porque ficaram sem energia ou foram destruidos.
2. Os sensores podem ficar incomunicáveis devido a problemas no canal de comunicação, ou por decisão de um algoritmo de controlo da rede. Neste caso, isso pode acontecer por diversas razões:
Para economizar energia ou por causa da presença de outro sensor na mesma região que já recolhe o dado pretendido. A situação contrá-ria também pode acontecer, sensores inactivos activarem-se ou novos sensores passarem a fazer parte da rede.
Essa configuração deve ser automática e periódica já que a configuração manual não é viável devido a problemas de escalabilidade.
2.3. Métricas de Desempenho 9
• Tarefas Colaborativas ;
O objectivo principal de uma RSSF é executar alguma tarefa colaborativa onde é importante detectar e estimar eventos de interesse e não apenas pro-mover mecanismos de comunicação.
Devido às restrições das RSSF, normalmente os dados são sumarizados para melhorar o desempenho no processo de detecção de eventos.
O processo de sumarização é dependente da aplicação que está a ser execu-tada.
2.3
Métricas de Desempenho
Quando se desenvolve uma solução para um sistema com base em RSSF é im-portante definir os principais critérios de avaliação que no fim da experiência validem os resultados obtidos, deste modo as principais métricas para avaliar os protocolos de roteamento das RSSFs são:
• Eficiência de Energia e Vida Útil do Sistema
O consumo de energia é dos principais factores a ter em conta ao projectar uma RSSF. Como os Nós sensores são alimentados por baterias ou pilhas, a utilização de protocolos deve permitir controlar, de uma forma mais efici-ente, a utilização da energia para maximizar a vida útil do sistema.
A vida útil do sistema pode ser medida por parâmetros como o tempo de actividade dos Nós activos ou tempo decorrido até que a rede pare de suprir a aplicação com a informação desejada sobre o fenómeno.
De acordo com Akyildiz et al. [4], o consumo de energia pode ser dividido em três domínios numa rede de sensores sem fio: sensoriamento, comuni-cação e processamento de dados.
A parte de sensoriamento possui limitações de hardware. Como os Nós sen-sores normalmente são inacessíveis, o tempo de vida de uma rede de senso-res depende do tempo de vida das suas fontes de energia. Algumas vezes é possível aumentar o tempo de vida do Nó utilizando algum tipo de energia
presente no ambiente, como a luz, utilizando uma célula fotovoltaica, por exemplo.
Em relação à comunicação, verifica-se que os Nós sensores têm um maior consumo de energia durante a transmissão e recepção de dados.
• Latência e Precisão
O estado de latência de um Nó na rede é definido como o intervalo de tempo durante o qual há interesse do observador em estudar um determinado fe-nómeno. Portanto, a semântica para a métrica relativa à latência depende do fenómeno e da aplicação.
A infra-estrutura da rede usada deve ser adaptativa de modo a obter a pre-cisão e atrasos desejados com uso mínimo de energia.
• Escalabilidade
A escalabilidade em redes de sensores é um factor importante por causa do grande número de Nós sensores instalados.
A escalabilidade exige protocolos de roteamento, endereçamento e agrega-ção de dados escaláveis, de forma que o grande número de Nós não exerça influência significativa no desempenho da rede.
2.4
Classificação e Arquitecturas
As redes sensores podem ser classificadas segundo a configuração, o sensoria-mento e o tipo de comunicação. Configuração:
• Composição
1. Homogénea: Rede composta por Nós que apresentam a mesma capa-cidade de hardware. Eventualmente os Nós podem executar funções de software diferente.
2. Heterogénea: Rede composta por Nós com diferentes capacidades de hardware.
2.4. Classificação e Arquitecturas 11
1. Hierárquica: São RSSF em que os Nós estão organizados em grupos (clusters). Cada grupo terá um coordenador (clusterhead) que poderá ser eleito pelos Nós.
2. Plana: Todos os Nós sensores são semelhantes. • Mobilidade
1. Plana: Quando é uma rede em que os Nós não estão organizados em grupos.
2. Estática: Todos os Nós sensores permanecem no local onde foram de-positados durante todo o tempo de vida da rede.
3. Móvel: Rede em que os Nós sensores podem ser deslocados do local onde inicialmente foram depositados.
• Densidade
1. Balanceada: A concentração e distribuição de Nós da rede por unidade de área é a ideal, segundo a função objectivo da rede.
2. Densa: Apresenta uma elevada concentração de Nós por unidade de área.
3. Esparsa: A rede apresenta uma distribuição não uniforme dos Nós na área controlada.
• Distribuição
1. Regular: Quando a rede apresenta uma distribuição uniforme dos Nós sobre a área em que se está a realizar o sensoriamento de um determi-nado fenómeno.
2. Irregular: A rede apresenta uma distribuição não uniforme dos Nós sobre a área em que está a operar..
Sensoriamento:
• Periódica: A recolha de dados de um fenómeno é realizada em intervalos regulares.
• Contínua: Os Nós sensores recolhem os dados de forma contínua.
• Reactiva: Apenas são recolhidos dados pelo sensor quando ocorrem even-tos de interesse ou quando solicitado pelo observador.
• Tempo real: Os Nós sensores dependendo do processo a que se destinam recolhem um determinado dado em tempo real e põem-no em simultâneo disponível para o utilizador.
Comunicação:
• Disseminação
1. Programada: Os Nós disseminam os dados em intervalos regulares. 2. Contínua: A disseminação dos dados recolhidos pelo Nó é contínua. 3. A pedido: Os Nós disseminam os dados em resposta à consulta do
observador e à ocorrência de eventos.
• Tipo Conexão
1. Simétrica: Todas as ligações existentes entre os Nós sensores, com ex-cepção do Nó sorvedouro, têm o mesmo alcance.
2. Assimétrica: As ligações entre os Nós comuns (mesma capacidade de hardware) têm alcance diferente.
• Transmissão
1. Simplex: Os Nós sensores possuem transceptor que permite apenas transmissão da informação.
2. Half-duplex: Os Nós sensores possuem transceptor que permite trans-mitir ou receber em um determinado instante.
3. Full-duplex: Os Nós sensores possuem transceptor que permite trans-mitir ou receber dados simultaneamente.
2.4. Classificação e Arquitecturas 13
As diferentes aplicações e os diferentes modos de operação das redes de sensores levam a duas categorias fundamentais: redes proactiva e redes reactivas, estas levam a diferentes tipos de protocolos de roteamento e modos de distribuir o consumo de energia entre os Nós.
Nas redes proactiva os Nós periodicamente trocam entre si dados recolhidos so-bre o evento que controlam, já nas redes reactivas as trocas de informações só ocorrem quando determinados eventos são sensoriados, cada Nó só reage a mo-dificações no ambiente em que estão colocados.
Qualquer das duas estratégias propostas converge na concepção do tratamento localizado e coordenado de modo a reduzir razões de consumo de energia des-necessária e tirar maior proveito das propriedades de escalabilidade e robustez, para partições de rede e para Nós em falha.
Esta comunicação entre Nós é realizada até que o Nó sink (Nó Sorvedouro) receba os dados. Este é capaz de comunicar com o controlador de tarefas através da In-ternet, GSM ou de uma ligação por satélite, figura 2.2. Esta arquitectura baseada em múltiplos saltos é chamada de multihop.
Figura 2.2: Comunicação multihop dos sensores na rede.
A arquitectura multihop permite diminuir significativamente o consumo de ener-gia na transmissão, pois evita que todos os Nós da rede precisem transmitir in-formações directamente ao Nó sink. Em vez disso, os Nós só precisam de realizar transmissões aos sensores adjacentes.
O protocolo SAR (Sequential Assignment Routing) realiza roteamento multihop, uti-lizando tabelas pelas quais faz uma selecção de múltiplos caminhos, evitando overhead em caso de falha.
Tanto os Nós sensores como o Nó sink, utilizam um conjunto de protocolos, que podem ser descritos em camadas [4].
As camadas dos protocolos utilizadas pelos Nós são semelhantes aos modelos de referência OSI e TCP/IP, são: camada física, ligação de dados, de rede, de transporte e de aplicação, além das camadas, são também definidos três planos: plano de gestão de energia, de mobilidade e de tarefas, que são independentes das camadas, figura 2.3.
Figura 2.3: Camadas e Planos da Arquitectura de uma RSSF.
2.5
Planos de Gestão
Os planos de gestão foram definidos para permitir que os sensores trabalhem de maneira mais eficiente, consumindo o mínimo possível de energia, fazendo a gestão da movimentação dos sensores na rede da maneira mais eficiente possível e partilhando recursos na rede.
São os planos de controlo que permitem que os sensores trabalhem realmente como uma rede. Sem eles haveria simplesmente um conjunto de sensores traba-lhando individualmente.
• Plano de Gestão de Energia
O plano de gestão de energia é responsável pelo controlo da energia usada por cada sensor. Como já descrito, a energia é um dos factores primordiais numa rede de sensores.
2.6. Arquitectura Funcional 15
Quando o nível de energia está baixo, um sensor pode enviar uma mensa-gem em broadcast para informar este facto aos demais sensores, pois, devido à arquitectura multihop, outro sensor podia utilizá-lo para encaminhar da-dos até ao Nó sink.
Assim, ao receber esta mensagem, os restantes sensores irão procurar um caminho alternativo até ao Nó sink, sem passar pelo sensor que está com pouca energia.
Este, por sua vez, continuará apenas a realizar o sensoriamento e só enviará mensagens em caso de detectar algum evento.
Outro método para economia de energia que um sensor pode utilizar é des-ligar o receptor após receber uma mensagem.
• Plano de Gestão de Mobilidade
Os sensores precisam de conhecer uma rota que permita chegar ao Nó sink. Isso é responsabilidade do plano de gestão de mobilidade.
Como os sensores são móveis, cada sensor deve sempre manter actualizada uma lista dos sensores vizinhos. Assim, é possível balancear o consumo de energia e as tarefas realizadas.
• Plano de Gestão de Tarefas
Nem todos os sensores precisam realizar sensoriamento em simultâneo, por isso, o plano de gestão de tarefas é responsável por escalonar essas tarefas para determinadas regiões.
Em geral, os sensores com mais energia são destacados para realizar estas tarefas mais vezes do que aqueles com um nível de energia mais baixo.
2.6
Arquitectura Funcional
As camadas foram definidas com o objectivo de permitir o isolamento de tarefas. Assim, uma determinada aplicação para um sensor pode ser definida indepen-dentemente do meio de transmissão utilizado, por exemplo:
• Camada de Aplicação
A camada de aplicação tem como objectivo tornar o hardware e o software das camadas inferiores transparentes para aplicações de controlo das redes de sensores.
Dependendo das tarefas de sensoriamento, diferentes tipos de software de aplicação podem ser feitos e utilizados na camada de aplicação.
• Camada de Transporte
A função colaborativa das RSSF traz várias vantagens em relação ao sen-soriamento tradicional, uma grande capacidade de recolha de dados e a cobertura de uma extensa área de sensoriamento.
Para isso, é necessário desenvolver um protocolo de transporte viável. Os principais objectivos da camada de transporte são:
1. Interligar as camadas de aplicação e de rede através de técnicas de mul-tiplexagem e desmulmul-tiplexagem.
2. Obter um serviço de entrega de dados com um mecanismo de controlo de erro, especificado pelo nível de confiabilidade exigido pela camada de aplicação.
3. Regular o volume de tráfego que circula na rede através de mecanis-mos de controlo de fluxo e congestionamento.
• Camada de Rede
A camada de rede é responsável pelo encaminhamento de dados entre os sensores. Os protocolos de roteamento utilizados devem suportar a comu-nicação multihop, e devem utilizar sempre, da forma mais eficiente possível, a energia do Nó sensor.
• Camada de Ligação de Dados
A responsabilidade desta camada é realizar a multiplexagem dos fluxos de dados, detecção dos quadros, acesso ao meio e controle de erro.
Esta camada garante uma comunicação ponto a ponto e ponto a multi-ponto em uma rede de comunicação.
2.7. Segurança 17
1. Criação de uma infra-estrutura.
2. Divisão distribuída e eficiente dos meios de comunicação entre os Nós sensores.
• Camada Física
A responsabilidade da camada física é fazer a selecção de frequências, criar uma frequência portadora, detecção de sinal, modulação e codificação. Quando se projecta a camada física para uma rede de sensores, a minimi-zação de energia consumida mostra-se de grande importância, acima inclu-sive dos problemas tradicionais de uma comunicação sem fio como reflexão, sombreamento, etc.
2.7
Segurança
As RSSFs apresentam dois problemas fundamentais no que diz respeito à segu-rança [5][6] computacional, problemas que as distinguem das RSSF comuns: a limitação de recursos energéticos e o hardware extremamente limitado.
Para uma rede de sensores conseguir fornecer dados com segurança é necessário cumprir diversos requisitos. Alguns desses requisitos são [7]:
• Disponibilidade: As RSSFs devem estar disponíveis sempre que for neces-sário.
• Confiabilidade: Os dados transmitidos nas RSSF, não devem ser "entendi-dos"por elementos fora desta (criptografia).
• Autenticidade dos Nós e dados: Garante que toda informação inserida na RSSF é realizada somente por Nós válidos, evitando-se que Nós sem per-missão introduzam informações falsas na rede [7].
• Actualização dos dados: Garante que os dados recebidos da RSSF são váli-dos e actualizaváli-dos.
• Integridade: Garante que os dados recebido não foram alterados durante a transmissão [8].
As redes de sensores sem fios como todas as redes em geral estão sujeitas a ata-ques que visam prejudicar o normal funcionamento da mesma [9]. Os principais ataques a este tipo de redes são:
• Soofing: Consiste em interceptar, alterar e gerar informações falsas tanto de roteamento como de leitura, causando problemas como loops, rotas falsas, dados imaginários, etc. Geralmente essas informações são originadas por sensores que invadiram a rede.
• Encaminhamento Selectivo: Um Nó malicioso não encaminha certos tipos de pacotes, causando a perda de informação. O aviso que um certo evento ocorreu pode ser perdido.
• Ataque Buraco Negro (Black Hole): Um Nó malicioso com valores desejá-veis de características como atraso, número de saltos ou potência de sinal, é introduzido na rede. Este Nó atrai para si todo tráfego dos Nós vizinhos. Desta forma, o tráfego não consegue chegar ao destino pretendido.
• Ataque Sybil: Em sistemas que estabelecem rotas redundantes, um Nó mali-cioso faz-se passar por vários, controlando assim grande parte da rede. Um Nó qualquer da rede "vê"vários elementos onde na verdade só há um. • Worholes: Dois Nós maliciosos podem criar um caminho falso entre si, como
um túnel, dividindo assim a rede.
• Inundação de Hello: Alguns protocolos de roteamento utilizam mensagens para identificar os vizinhos (por exemplo, mensagens do tipo Hello) um Nó malicioso com um transmissor potente pode enviar esse tipo de sinal para a rede toda, desviando assim grande parte do tráfego para si.
• Spoofing de Confirmação: Um Nó malicioso insere informações falsas, fa-zendo com que um Nó fora de operação ou um canal degradado pareça estar a funcionar correctamente.
• Anel Malicioso (Evil Ring): Vários Nós maliciosos circundam a rede ou parte dela, dificultando e alterando as transmissões da região do interior do anel.
2.8. Protocolos de Comunicação 19
2.8
Protocolos de Comunicação
Numa rede de sensores, o protocolo é o responsável por gerir a comunicação em geral, tanto entre os Nós sensores como entre a rede e o mundo exterior (através do Nó sink).
A utilização de um protocolo é fundamental, pois um simples acréscimo de Nós na rede pode deteriorar o normal funcionamento de todo o sistema. Precisamos assim que o protocolo controle inteligentemente a comunicação, de modo a evitar e corrigir possíveis congestionamentos.
Esse controlo pode ocorrer de várias formas, desde a redução da emissão de rela-tórios por cada Nó à desactivação de Nós, incluindo a agregação de informações. Nos protocolos de roteamento para redes planas, todos os Nós são considerados iguais do ponto de vista funcional, ou seja, a actividade de roteamento é utilizada de uma maneira idêntica por todos os Nós da rede. Exemplos de protocolos de roteamento para redes planas:
• DD (Directed Diffusion),
• SPIN (Sensor Protocol for Information via Negotiation), • SAR (Sequential Assignment Routing),
Adaptive Local Routing Cooperative Signal Processing: 1. Noncoherent Processing,
2. Coherent Processing.
2.8.1
Protocolo DD
O protocolo de difusão direccionada (Directed Diffusion) [10] tem como objectivo estabelecer canais de comunicação eficiente entre os Nós sensores e a estação co-ordenadora. Este protocolo introduz dois novos conceitos:
• Agregação de dados;
Este é aplicado regularmente em redes orientadas a eventos e consultas. A coor-denação entre Nós vizinhos para estabelecer um determinado caminho é alcan-çado através do reforço de determinado caminho, baseado na observação das per-das, variância de atraso, ou mesmo inibindo determinados caminhos, baseado-se no baixo nível de energia do Nó.
Aqui o interesse pela consulta dos dados é expresso pelos Nós observadores, este é difundido pela rede usando interacções locais. A necessidade desses dados faz com que os Nós estabeleçam gradientes de dados para o Nó que expressou interesse nos dados desse, figura 2.4. Assim que um Nó que satisfaça a consulta de dados é encontrado (Nó fonte), este começa a transmitir os dados.
Figura 2.4: Protocolo Difusão Direccionada.
2.8.2
Protocolo SPIN
O princípio de funcionamento do protocolo SPIN (Sensor Protocols for Information via Negotiation) [11], consiste em utilizar a informação sobre a quantidade de ener-gia disponível em cada sensor para fazer o roteamento. Este utiliza protocolos de negociação para disseminar os dados de um Nó sensor para todos os Nós da rede. Sempre que é detectado um Nó com um nível de energia perto do limite pré-estabelecido, ele vai adaptar-se de maneira a participar de uma forma menos activa na disseminação de dados, transmitindo apenas quando necessário. Existem três estágios de funcionamento no protocolo SPIN: ADVertise, REQuest, DATA.
2.8. Protocolos de Comunicação 21
Este é iniciado quando são obtidos novos dados por um Nó e se pretende disseminá-los, enviando para os Nós vizinhos uma mensagem ADV contendo metadados (estágio ADV). O metadado pode ser o ID de cada sensor, ou uma região, etc... Ao receber um ADV, os Nós vizinhos verificam se possuem os dados requeridos ou se já requisitaram tal dado. Se não possuir aqueles dados, ele responde ao Nó que disseminou o pedido com uma mensagem de requisição de dados (estágio REQ).
O Nó que possuir os dados requeridos responde com uma mensagem de dados (estágio DATA). Posteriormente a recepção dos dados, o Nó vizinho envia uma mensagem ADV a todos os Nós adjacentes, informando que possui um dado novo e que pretende reenviá-lo, reiniciando-se assim novamente o ciclo.
2.8.3
Protocolo SAR
O objectivo do protocolo SAR (Sequential Assignment Routing) [12] é tornar mais fácil o roteamento multihop, e minimizar a média ponderada de métricas de qua-lidade de serviços (QoS - Qualit of Service), através do tempo de vida da rede. A escolha do caminho é feita pelo Nó que cria o pacote de dados, excepto se hou-ver uma mudança da topologia da rede que vai alterar o caminho obrigando o pacote a ser desviado. A escolha do caminho é com base nas tabelas de rotea-mento, enviando um overhead em caso de falha. A cada pacote encaminhado pela rede é atribuído uma classificação de QoS (produto da métrica de QoS e a média da prioridade dos pacotes). A ideia é prover cada pacote com um coeficiente de QoS relativo à sua prioridade.
Nos protocolos de roteamento para redes hierárquicas são estabelecidas duas classes distintas de Nós, os Nós fontes e os Nós coordenadores (Nó gateway). Os Nós fontes apenas realizam a recolha de dados e enviam os dados para o co-ordenador da sua rede, este pode executar uma fusão/agregação destes dados antes de reenviá-los para o ponto de acesso que comunica com o exterior. To-dos os Nós são consideraTo-dos iguais do ponto de vista funcional. Exemplos de protocolos de roteamento para redes hierárquicas:
• CBRP (Cluster Based Routing Protocol),
• TEEN (Threshold-sensitive Energy Efficient Network),
• APTEEN (Adaptive Periodic Threshold-sensitive Energy Efficient Network), • SHARP (Hybrid Adaptive Routing Protocol),
• PEGASIS (Power Efficient Gathering in Sensor Information System).
2.8.4
Protocolo LEACH
O protocolo LEACH foi desenvolvido para reduzir o consumo de energia, sendo apropriado para redes pró-activas. É um protocolo com mecanismo de envio de dados contínuo e sem mobilidade, foi desenvolvido para redes homogéneas e utiliza ciclos durante os quais são formados conjuntos de Nós (clusters) [13]. Este é recomendado para redes em que a recolha de dados é feita periodicamente e que todos os Nós da rede iniciam o ciclo em simultâneo.
Para uma rede em que o período de vida seja longo pode acontecer que os Nós iniciem ciclos em momentos inoportunos devido às pequenas discrepâncias que tendem a ocorrer no relógio dos mesmos.
É usada uma arquitectura de aglomeração de Nós (clustering), onde todos enviam os seus dados para o Nó gateway, agregando os mesmos e enviando-os.
2.8.5
Protocolo TEEN
O funcionamento do protocolo TEEN é similar ao LEACH, excepto pelo facto de que os Nós sensores podem não possuir dados a serem transmitidos de tempos em tempos [14].
Uma dos objectivos deste protocolo é diferenciar as redes de sensores classificando-as como redes pró-activclassificando-as ou redes reactivclassificando-as, sendo no entanto este protocolo mais adequado para redes reactivas.
O protocolo TEEN utiliza uma estratégia de aglomerar os Nós semelhante ao do protocolo LEACH, embora adopte um mecanismo diferente da fase de transmis-são de dados.
2.8. Protocolos de Comunicação 23
Ele utiliza dois parâmetros recebidos aquando da troca do Nó gateway:
• Hard Threshold (HT): logo que o valor absoluto do evento exceder o valor de hard threshold, o Nó que detectar este valor vai activar o seu transmissor e informar da ocorrência de um evento.
• Soft Threshold (ST): variação mínima que justifica a transmissão do valor após ter sido transmitido uma vez.
Se o valor exceder HT pela primeira vez, é armazenado numa variável e transmi-tido durante o intervalo de tempo alocado para a transmissão do Nó. De seguida, se o valor detectado exceder o valor armazenado ST, o Nó transmite o dado ime-diatamente. O valor enviado é guardado para uma comparação futura.
Uma desvantagem existentes prende-se com o facto de não ser atingido o nível de hard threshold, assim o Nó ficará sem transmitir. Para evitar colisões neste protocolo pode-se utilizar escalonamento TDMA e CMDA.
2.8.6
Protocolo APTEEN
O protocolo APTEEN (Adaptive TEEN) [15] é baseado no protocolo TEEN sendo que introduz algumas novas características.
Sempre que se realizada a troca do Nó gateway o procedimento é similar ao pro-tocolo TEEN, só que acrescido dos seguintes parâmetros:
• endereço - atribuindo um canal TDMA para cada Nó;
• CountTime (CT) - o tempo máximo entre duas comunicações sucessivas; O endereço TDMA faz com que não ocorram colisões entre as comunicações dos Nós de um cluster.
2.8.7
Protocolo SHARP
A utilização deste protocolo faz com que se estabeleça um maior equilíbrio entre as comunicações reactivos e pró-reactivos, fazendo um ajuste do grau com que as informações de encaminhamento são difundidas na rede.
Com isso o protocolo SHARP é adequado para redes com características dinâmi-cas relativas à comunicação, em regiões que possuam um tráfego muito grande e outras sem nenhum tráfego, adaptando-se à heterogeneidade das regiões pró-activas e repró-activas, figura 2.5 [16].
Figura 2.5: Protocolo SHARP.
2.8.8
Protocolo PEGASIS
O protocolo PEGASIS (Power-Effcient Gathering in Sensor Information Systems) [17] é um protocolo para RSSF baseado no conceito de cadeias. Cada Nó troca in-formações somente com os Nós vizinhos mais próximos formando uma corrente entre eles, apenas um é escolhido a cada momento para transferir as informações recolhidas ao Nó gateway (figura 4.2).
2.9. Norma IEEE 802.15.4 25
Portanto, o número de trocas de mensagens será baixo e a comunicação será rea-lizada entre Nós adjacentes. Com este método espera-se que a energia gasta seja menor, quando comparada com os outros protocolos que requerem muitas trocas de mensagens para determinar qual o coordenador e formar clusters, e protocolos em que os Nós trocam constantemente mensagens com o Nó gateway de forma directa (o gateway habitualmente encontra-se distante dos Nós).
Isto implica maior tempo de vida para cada Nó e um menor consumo da largura de banda da rede. O protocolo PEGASIS assume que:
• O Nó gateway (estação base) encontra-se situado a uma distância fixa da rede;
• Os Nós são capazes de transmitir dados directamente para o Nó gateway e para qualquer outro Nó;
• Cada Nó tem a localização dos outros Nós;
• Os Nós são homogéneos e com nível energético uniforme; • Os Nós são estáticos.
2.9
Norma IEEE 802.15.4
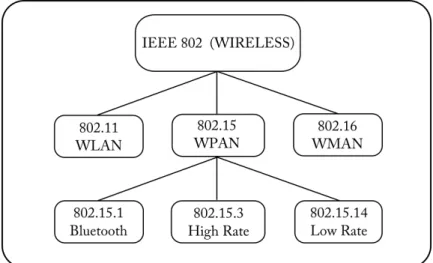
Dentro dos padrões estabelecidos pelo IEEE (Institute of Electrical and Electronics Engineers) para protocolos de comunicação em rede, está o grupo 802, que é uma secção do IEEE relacionado à rede e tecnologia de médio porte e local [18]. Este grupo define alguns outros subgrupos que especificam as redes que utilizam co-municação sem fio (wireless).
De entre estes subgrupos os mais importantes são 802.11, 802.15 e 802.16. O pa-drão 802.11 define o primeiro papa-drão IEEE para redes locais sem fio.
Como é possível observar-se na figura 2.7, o grupo 802.15 ainda é dividido em al-guns padrões, onde se encontra o padrão 802.15.4 (parte integrante do trabalho), que definem as LR-WPANs (Low-Rate WPANs), que possuem como aplicação as WSNs (Wireless Sensor Network) ou RSSF (Redes de Sensores sem Fio).
Figura 2.7: Organograma dos padrões IEEE 802.
Entretanto, todos fazem a transmissão de pequenos pacotes, com restrições no que se refere à área de cobertura do sinal.
A norma IEEE 802.15.4 define as duas primeiras camadas do modelo de referência OSI (Open Systems Interconnection), estabelecido pela ISO (International Standard Organization), são: a Camada Física - Physical Layer (PHY) e a Camada de Ligação de Dados, esta subdivide-se na Camada de Controlo de Acesso ao Meio - Medium Access Control (MAC) e na camada Logical Link Control (LLC), figura 2.8. A primeira versão do padrão foi publicada em 2003 (IEEE 802.15.4-2003), a última e mais actual versão foi publicada em 2006 (IEEE 802.15.4-2006).
Este padrão é utilizado em dispositivos que necessitam de baterias com um tempo de vida longo, baixa latência, para controladores, sensores, controlo remoto e dis-positivos electrónicos portáteis [19].
O duty cycle esperado ao nível da transmissão nas redes de sensores, utilizando o 802.15.4, é de cerca de 1%.
As redes 802.15.4 funcionam nas bandas ISM (não licenciadas), e é um protocolo simples para envio de pacotes de dados para redes sem fio.
O acesso ao meio (canal)é via Carrier Sense Multiple Access collision avoidance (CSMA - CA) e com time slotting opcional. Possui reconhecimento de mensagem e uma estrutura para sinalização, chamada beacon. A segurança é feita ao nível da ca-mada (multi-caca-mada).
2.9. Norma IEEE 802.15.4 27
Figura 2.8: Arquitectura de LR-WPAN [18].
Este protocolo está optimizado para pequenas taxas de transmissão (250kps por canal, na banda dos 2.4GHz, 40kbps na banda dos 915M Hz e 20kbps na banda dos 868M Hz).
Muitos destes protocolos das redes de sensores são baseados nas redes ad hoc, no entanto têm algumas particularidades [19]:
• O conhecimento global da rede não é essencial, visto que o objectivo não é ter comunicações ponto-a-ponto entre Nós, mas sim entre um Nó ou um cluster e a fonte/gateway;
• Como já foi referido, os recursos energéticos são limitados, o que implica al-goritmos de reduzida complexidade, em que o overhead seja o mínimo pos-sível;
2.9.1
Camada Física
Esta camada é responsável pelo princípio fundamental das comunicações sem fio, ou seja, transmitir e receber os pacotes através das ondas electromagnéticas. Ela define como se comunicam os dispositivos da rede através do canal de comu-nicação sem fio.
Este padrão utiliza a técnica de modulação de transmissão denominada DSSS (Direct-Sequence Spread Spectrum), que permite ter dispositivos da rede com pouca complexidade e de baixo custo.
O pacote de transmissão do padrão 802.15.4 recebido pela primeira camada pode conter um máximo de 127 bytes, onde um byte representa o tamanho do pacote. Dos 127 bytes, seis deles são reservados exclusivamente para a camada PHY, são os bytes de SHR (Synchronization Header), estes definem o cabeçalho e o delimita-dor de início da frame e os bytes de PHR (PHY Header), que contêm o tamanho da frame, como é mostrado na figura 2.9 [19].
Figura 2.9: Formato dos pacotes transmitidos na camada física [18].
2.9.2
Sub-camada MAC
A sub-camada MAC é responsável pela interface entre as camadas física e de aplicação. Utiliza como mecanismo de prevenção de colisão CSMA-CA (Carrier Sense Multiple Access - Collision Avoidance).
A rede 802.15.4 pode funcionar em dois tipos de configurações, configuração Bea-con e nonBeaBea-con. Numa rede Bea-configurada como nonBeaBea-con, os dispositivos, depois de terem sido associados à rede, podem estabelecer comunicação um com o outro, a qualquer hora.
O acesso ao canal de comunicação e a ligação são controlados através do me-canismo CSMA-CA. No entanto, se uma rede for configurada como Beacon, é o coordenador da rede que transmite periodicamente uma frame intitulado Beacon, que é utilizado pelos dispositivos para se sincronizar e determinar o envio e re-cepção das mensagens.
2.9. Norma IEEE 802.15.4 29
Por outras palavras, nas redes nonBeacon a transmissão de dados pode ocorrer a qualquer momento, desde que o canal esteja livre, já no modo Beacon, os dados do Nó para o Nó coordenador são transferidos somente num intervalo definido, utilizando transferência de dados indirecta.
O intervalo entre Beacons é denominado Superframe, que é dividido em dois pe-ríodos denominados CAP (Contention Acces Period) e CFP (Contention Free Period). O CAP é o intervalo de tempo destinado a permitir a transmissão dos pacotes de dados dos dispositivos sem sincronização, como dispositivos de alarme ou de controlo, onde todos os Nós que pretendam transmitir devem competir com outros dispositivos, utilizando o protocolo CSMA/CA MAC.
Já o período CFP é destinado à transmissão dos dados com sincronização e baixa latência.
Dentro do intervalo CFP existem sub-intervalos de tempo intitulados GTSs (Gua-ranteed Time Slot) que mapeiam dispositivos ou um conjunto de dispositivos, o coordenador pode alocar até sete destes GTSs.
Estes períodos são destinados a aplicações que necessitam recolher dados em in-tervalos de tempo fixos.
Cada dispositivo transmitindo em GTS deve certificar que a sua transmissão é terminada antes do próximo GTS ou final do CFP.
O sinal Beacon é enviado periodicamente pelo coordenador para sincronizar todos os Nós remotos na rede e sinalizar o início do superframe, conforme indicado na figura 2.10 [19].
Figura 2.10: Beacons [18].
É possível constituir-se redes que não contenham CFP ou com superframes que possuam um período inactivo, onde todos os dispositivos da rede entram num
modo de "sleep", o que diminui o consumo de energia, aumentando assim o tempo de duração da bateria, como mostra a figura 2.11.
Figura 2.11: A) Configuração sem CFP B) Configuração com período inactivo [18].
É importante lembrar que a utilização dos Beacons periódicos é opcional. As redes que não utilizam este serviço são chamadas de nonBeacon. O tipo de tráfego de dados nesta rede pode ter características distintas.
Podem ser dados periódicos como sensores distribuídos, que enviam a informa-ção lida em intervalos pré-definidos, podem ser dados intermitentes, que são en-viados apenas em condições específicas, como interruptores de luz, e podem ser dados intermitentes de baixa latência, que necessitam que o tempo entre a trans-missão e recepção do sinal seja o menor possível, como exemplo os alarmes de segurança.
Estas características, aliadas aos requisitos de consumo de energia, vão definir a configuração dos tipos de tráfego da rede.
2.9.3
Tipos de Dispositivos
Os dispositivos de rede da especificação 802.15.4 são divididos em duas catego-rias: dispositivos do tipo FFD (Full Function Device), dispositivos do tipo RFD (Reduced Function Device).
Os dispositivos da primeira categoria (FDD) contêm todos os recursos disponí-veis do padrão 802.15.4. e a sua composição é mais complexa. Por exemplo, o
2.9. Norma IEEE 802.15.4 31
coordenador da rede, dispositivo FDD, mantém um conhecimento completo da rede, por isso é o mais sofisticado e é o que possui maior memória e capacidade de processamento, ele coordena a rede, escolhe a forma de acesso ao meio, com ou sem beacon e é ele que permite que novos Nós entrem na rede.
Ele possui uma memória adicional, o seu processamento computacional torna-o ideal para realizar funções de roteamento da rede.
Estes dispositivos geralmente são alimentados directamente pela rede eléctrica, por possuírem rotinas de controlo e supervisão que têm maior consumo de ener-gia do que os outros elementos da rede.
No entanto podem também ser utilizados nos limites da rede onde realizam a ligação ao mundo real, enquanto o Reduced Function Device (RFD) possui funções limitadas para controlar custos e complexidades do tráfego da rede e por isso não fazem roteamento, estes são usados nos limites das redes.
Já os dispositivos RFD possuem funções reduzidas e por essa razão são limitados nas suas tarefas, sendo destinados geralmente a serem usados como elementos terminais da rede, como sensores e actuadores. Estes por se tratarem de elemen-tos com funções de baixa complexidade e de baixo consumo de energia, podem ser alimentados com baterias.
A partir destes dois tipos de dispositivos são estabelecidos os diferentes elemen-tos da rede:
• Coordenador: São dispositivos FFD destinados a controlar a rede e contro-lar o fluxo de informação. Toda a rede deve ter apenas um coordenador; • Dispositivos Finais (End Devices): São elementos que operam nos pontos
finais da rede, como sensores de temperatura e chaves de contacto. São geralmente dispositivos RFD e são alimentados por baterias;
• Routers: São elementos FFD destinados a fazer a comunicação dos disposi-tivos finais a outros disposidisposi-tivos da rede na topologia Malha.
Estes podem conter também elementos sensores e geralmente são alimen-tados por baterias;
• Gateways: A sua função é fazer a interface com outras redes, por exemplo, fazer a interface de uma rede 802.15.4 com uma rede por cabo TCP/IP;
2.9.4
Topologias de Rede
O norma IEEE802.15.4 pode operar nas topologias estrela (Star) e árvore (Tree), se operar com a camada de rede ZigBee, pode operar ainda em malha (Mesh), conforme mostrado na figura 2.12.
Figura 2.12: A) Topologia Estrela B) Topologia Árvore C) Topologia Malha Na configuração estrela a rede é composta por um coordenador, que é respon-sável por controlar a rede, e pelos dispositivos finais (end-devices). Estes podem mandar mensagens para o coordenador e, se quiserem enviar mensagens entre eles, dependem directamente do coordenador para efectuarem a transmissão. Esta rede é um exemplo de rede single-hop, pois só existe um caminho para a transmissão de dados de cada ponto.
Já na configuração árvore existe outro elemento presente na rede chamado de rou-ter (encaminhador). Aqui os dispositivos finais podem-se unir à rede utilizando o coordenador ou os routers, sendo que a utilização destes elementos possibilita que os sensores estejam fora da região de cobertura do coordenador, desde que estejam ao alcance de algum router.
Nesta topologia os roteadores transmitem dados e mensagens utilizando uma estratégia de hierarquia de roteamento, podendo também utilizar comunicação Beacon.
2.9. Norma IEEE 802.15.4 33
A última topologia é a malha, onde é possível que os dispositivos finais da rede possam mandar mensagens uns para os outros, sem a necessidade destas mensa-gens passarem pelo coordenador ou router. Para que isto aconteça, estes disposi-tivos devem ser obrigatoriamente elementos FFD.
Capítulo 3
Sensores de Ultra-Som
O termo ultra-som é usualmente aplicado a ondas acústicas, cuja frequência está para além do limite de audição do ouvido humano, pois este limita-se à gama de frequências, que se situa, aproximadamente, entre 20Hz e 20kHz.
Os sensores de ultra-sons operam, normalmente, com frequências compreendi-das entre os 20kHz e alguns gigahertzs, para aplicações tecnológicas e de carac-terização de materiais, através de testes não destrutivos (NDT).
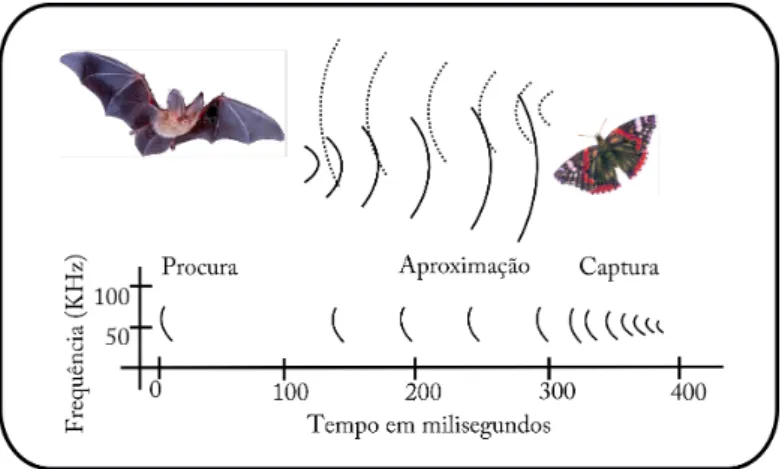
Na natureza existem alguns animais capazes de ouvir ultra-sons, é o caso dos cães, que chegam a perceber sons com 25.000 vibrações por segundo (25kHz), já os morcegos captam sons até 50.000 vibrações por segundo (50kHz), estes usam os ultra-sons para se poderem orientar e caçar na mais completa escuridão. Os ultra-sons emitidos atingem os objectos, esses são reflectidos na forma de ecos e detectados pelo ouvido do morcego, que actua como um autêntico radar (figura 3.1) [20].
Durante a perseguição da presa, o morcego envia uma série rápida de guinchos e os ecos dão-lhe a posição exacta do alvo, bastando aumentar o ritmo dos sons para se poder precipitar sobre a presa.
Com base na informação trazida pelos ecos, eles conseguem discriminar objectos afastados por apenas 0.3 milmetros, avaliar o seu tamanho, a sua localização, velocidade, direcção de movimento e ainda a espessura.
Os morcegos utilizam essas capacidades para perseguir e caçar insectos em ca-vernas escuras, partilhadas por milhares de outros morcegos e pelos seus ecos, tudo isto sem colisão e a velocidades que podem exceder os 65km/h [21].
Figura 3.1: Morcego a perseguir uma presa.
Os sensores de ultra-sons foram utilizados pela primeira vez por volta de 1918, no desenvolvimento do sistema SONAR (SOund Navigation And Ranging), o ob-jectivo deste sistema era permitir a detecção da posição, velocidade e orientação de objectos, em ambiente subaquático [22].
Foi nos primeiros sistemas fotográficos, dotados de focagem automática, que os ultra-sons começaram a ser usados ao "ar livre", tinham como função medir a distância entre a câmara fotográfica e o objecto a fotografar.
Actualmente a utilização de sistemas de ultra-sons para sistemas ao ar livre, tem recebido alguma atenção por parte de muitos investigadores, pelo facto destes sistemas serem de grande simplicidade de utilização e de baixo custo.
Dentro de um amplo leque de aplicações que se pode encontrar para os ultra-sons, existe a medição de distâncias.
3.1
Medição de Distâncias com Ultra-sons
Um dos princípios básicos que permite utilizar estes sensores, como uma ferra-menta de medição de distâncias, é a medição do intervalo de tempo decorrido entre a emissão de uma onda de ultra-som e a recepção da sua reflexão na super-fície de um objecto.
Esta técnica designa-se por tempo de voo ou TOF (Time Of Flight). Essa informa-ção é depois usada para determinar a sua posiinforma-ção.
3.1. Medição de Distâncias com Ultra-sons 37
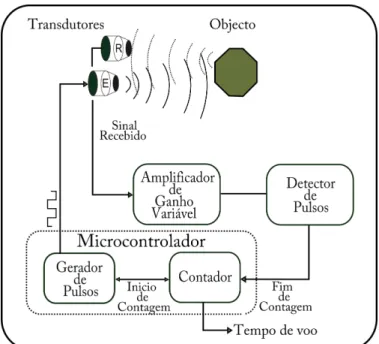
O princípio de medição de pequenas distâncias, usando a propagação do som no ar, é um processo fácil de explicar (figura 3.5): em cada medição, o trans-dutor emissor é excitado com um trem de impulsos, que o faz vibrar, emitindo uma onda sonora perpendicular à superfície do sensor, em simultâneo o transdu-tor receptransdu-tor está pronto para a recepção dos ecos vindos dos objectos, tendo no entanto sido inicializado já o contador, é de referir que o sistema pode detectar falsas detecções, que poderiam ser provocadas por vibração residual devido às suas proximidades.
A recepção das ondas reflectidas pelo objecto (totalmente ou parcialmente re-flectidas (eco)), consoante a rugosidade do mesmo, vão gerar um sinal eléctrico correspondente (pelo transdutor), ao qual é aplicado uma etapa de amplificação. O efeito desta amplificação de ganho variável é compensar as atenuações sofridas devido à distância percorrida.
Quando a energia da onda reflectida sobe acima de um limiar pré-estabelecido é parado o contador, ficando no seu registo o número de períodos correspondentes ao tempo de voo. O tempo que decorre desde a transmissão até à recepção do eco (TOF), pode então ser medido com sistemas electrónicos simples.
Deste modo, a distância d entre o transdutor e o objecto reflector pode ser calcu-lada através do tempo t0 medido e da velocidade de propagação do som no ar (m/s), c.
d = c × t0
2 (3.1)
A velocidade de propagação do som no ar está relacionada directamente com a temperatura, para baixas temperaturas a velocidade com que as moléculas de ar se movem é baixa, diminuindo assim a velocidade com que se propaga o som. A velocidade de propagação do som no ar é dada aproximadamente por:
c ≈ 20.1qθk(m/s) (3.2)
onde θcé a temperatura ambiente em graus centígrados e θk= θc+ 2730C, a tem-peratura Kelvin [23].
Figura 3.2: Funcionamento do sensor de ultra-sons.
3.2
Modelo Físico de um Sensor de Ultra-som
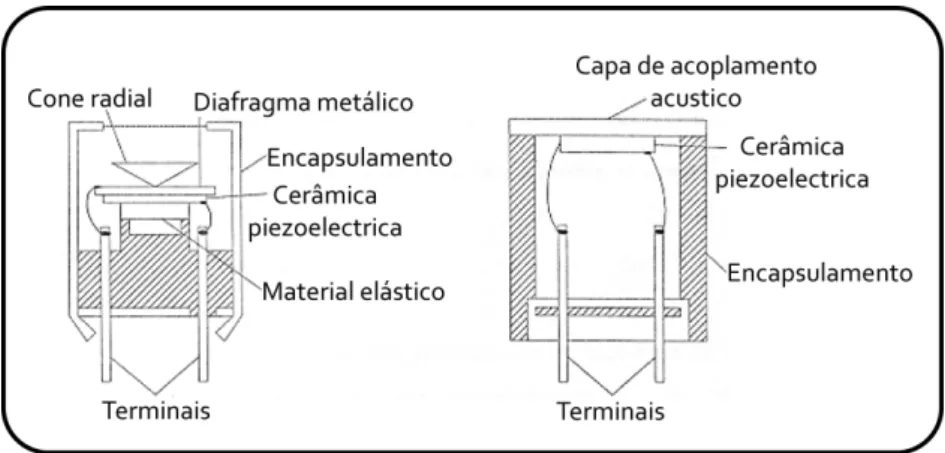
Um transdutor é um dispositivo que converte um tipo de energia em outro e vice-versa, em relação aos transdutores com capacidades de enviar ultra-sons es-tes dividem-se em electrostáticos e piezoeléctricos, eses-tes fazem a conversão da energia eléctrica em energia mecânica de vibração (ultra-som).
Os transdutores electrostáticos, são modelados teoricamente como um pistão plano radiante [24] como por exemplo o transdutor electrostático da polaroid (modelo 600) 3.3.
Este é constituído por duas placas paralelas, no qual uma das placas é metalizada em uma das faces, sendo a outra face composta por material isolante. A placa metalizada é um disco metálico, cuja superfície possui ranhuras circulares que formam cavidades em forma de anéis concêntricos. As placas do condensador são separadas por um material isolante e pelo ar contido no interior das ranhuras. O componente principal deste tipo de transdutores é uma lâmina fina, esta é feita de um material plástico (kapton), sobre o qual é depositado uma fina camada con-dutora, sendo esticada sobre um suporte metálico, obtendo-se deste modo um condensador cujo dieléctrico é a lâmina plástica, sendo as armaduras
![Figura 2.11: A) Configuração sem CFP B) Configuração com período inactivo [18].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15923475.1094140/52.892.173.660.244.470/figura-configuração-sem-cfp-configuração-com-período-inactivo.webp)