José Manuel Almeida Martins
Controlo em tempo real
de estruturas hidráulicas
José Manuel Almeida Martins
4 Contr olo em tem po r eal de es tr utur as hidr áulicas
Escola de Engenharia
Dissertação de Mestrado
Ciclo de Estudos Integrados Conducentes ao
Grau de Mestre em Engenharia Civil
Trabalho efetuado sob a orientação do
Professor Doutor José Luís da Silva Pinho
José Manuel Almeida Martins
Controlo em tempo real
de estruturas hidráulicas
Agradecimentos
É com todo o sentimento que aqui descrevo o meu agradecimento às pessoas que sempre me apoiaram e incentivaram, não só na realização da presente dissertação como em todo o meu percurso académico.
Em primeiro lugar queria destacar o Professor Doutor José Luís Pinho, orientador da
dissertação, pela sua prontidão e disponibilidade demonstrada. Foi, sem dúvida, dos professores que mais contribuiu para a minha formação. Muito obrigado Senhor Professor.
Em segundo lugar queria agradecer a todos os Professores do curso do Mestrado Integrado em Engenharia Civil por todos os ensinamentos, conhecimentos e experiências transmitidas para a conclusão do curso e me prepararem como homem e futuro Engenheiro Civil.
À minha família por todo o esforço e sacrifício para que nunca me faltasse nada durante todo o meu percurso académico, pelas suas palavras sempre de apoio e motivação, pelos conselhos sempre certeiros. A eles devo este curso e todas as minhas habilitações. Um especial
agradecimento a eles.
Ao meu tio e colega Vitor Fernando, que tanto no papel de tio como de colega de turma foi formidável pelo que me ensinou, apoiou e aconselhou. Fico-te eternamente grato.
Aos meus amigos por todos os momentos vividos durante todo este tempo. Muitos deles, hoje considero família, pessoas que sei que estão e continuarão sempre presentes. Sem vocês não seria a mesma coisa. Muito obrigado.
Resumo
A operação de estruturas hidráulicas com recurso a técnicas de otimização permite ganhos significativos de eficiência e eficácia. Atualmente existem ferramentas que permitem a implementação de diferentes técnicas de controlo de estruturas hidráulicas, permitindo tomadas de decisão sustentadas em análises multicritério.
Pretendeu-se com este trabalho caracterizar de forma pormenorizada e aprofundada uma ferramentas disponível para a implementação de técnicas de controlo de estruturas hidráulicas.
O estudo centrou-se numa metodologia baseada numa técnica de controlo assente em modelos de previsão. É apresentado o modelo de controlo baseado em previsão (Model Predictive Control – MPC) e o software que se aplicou para a sua implementação no caso em estudo. Foi selecionado o aproveitamento hidroelétrico do Lindoso para ilustrar a aplicação, sendo apresentada de foram resumida a informação relativa a bacia hidrográfica onde está inserido e a estrutura hidráulica, incluindo a recolha de dados, relativos a restrições e definição de objetivos de gestão. Descreve-se a sua implementação e apresenta-se um exemplo de aplicação numa situação de cheia
Conseguiu-se assim a implementação de um sistema de controlo baseado na aplicação de
software disponibilizado para o efeito, sendo ainda realizada uma análise ao desempenho do
sistema de controlo implementado em diferentes situações para que este possa ser utilizado como suporte a decisão na gestão da barragem em diferentes situações hidrológicas.
Abstract
The operation of hydraulic structures using optimization techniques allows significant gains in efficiency and effectiveness. Currently there are tools that allow the implementation of
different control techniques of hydraulic structures, allowing decision making supported by multi-criteria analysis.
The intention of this study was to characterize in detail and depth in one tool available for implementing control techniques of hydraulic structures.
The study focused on a technique based on prediction models based on control methodology. And software that applied to their implementation in the case study - the model-based
prediction control (MPC Model Predictive Control) is displayed. The hydroelectric Lindoso was selected to illustrate the application of the information being presented were summarized on the watershed where it is inserted and the hydraulic structure, including the collection of data relating to restrictions and definition of management objectives. Describes the
implementation and presents an application example in a situation of flood
So we were able to implement a control system based on the application of software available for this purpose and is still held assesses the performance of the control system implemented in different situations so that it can be used as decision support in the management of the dam in different hydrological situations.
Índice
Agradecimentos ... iii Resumo ... v Abstract ... vii Índice de Figuras ... xi 1. INTRODUÇÃO ... 1 1.1. Generalidades ... 1 1.2. Objetivos ... 2 1.3. Estrutura da Dissertação ... 22. OPERAÇÃO DE ESTRUTURAS HIDRÁULICAS ... 3
2.1. Generalidades ... 3
2.2. Automação na gestão da água ... 4
2.3. Controlo de estruturas Hidráulicas ... 4
2.4. Controlo Baseado em Modelos de Previsão ... 7
2.4.1. Generalidades ... 7
2.4.2. Desenvolvimento do Programa RTC-Tools ... 11
2.4.3. Campos de Aplicação ... 12
2.4.4. Modelo Interno de Previsão ... 14
2.4.5. Equações Aplicadas nos Modelos Internos de Previsão ... 14
2.4.6. Esquema de Discretização ... 17 2.4.7. Função Objetivo ... 19 2.4.8. Restrições ... 21 2.4.9. Otimização ... 22 3. PROGRAMA RTCTools ... 25 3.1. Configuração em XML ... 25 3.2. Condições iniciais ... 25
3.3. RTC-Tools – Exemplo de Aplicação ... 26
3.3.1. Barragem ... 26
3.3.2. Geometria do problema ... 26
3.3.3. Características de Armazenamento ... 27
3.3.4. Características Hidráulicas dos Órgãos de Descarga ... 27
3.3.5. Ficheiro rtcRuntimeConfig.xml ... 29
3.3.6. Ficheiro rtcDataConfig.xml ... 30
3.3.7. Ficheiro rtcObjectiveConfig ... 32
3.4. Execução do Programa RTCTools ... 34
3.5. Resultados ... 34
4. CASO DE ESTUDO ... 39
4.2. Barragem do Alto Lindoso ... 39 5. CONCLUSÕES ... 53
Índice de Figuras
Figura 1: Diagrama de blocos da gestão dos níveis de água ... 3
Figura 2: Controlo feedback e controlo feedforwar (Schuurmans, 1997) ... 6
Figura 3: Diagrama de blocos do MPC num sistema atual (van Overloop, 2006) ... 9
Figura 4: Arquitetura e interfaces da RTC-Tools (RTC Manual) ... 12
Figura 5: Esquema de uma malha e o fluxo de informação para calcular um intervalo de tempo17 Figura 6: Diferentes casos para a resolução do sistema de equações ... 18
Figura 7: Variáveis usadas numa restrição suave (van Overloop, 2006) ... 22
Figura 8: Exemplo de uma barragem hidroelétrica ... 26
Figura 9: Características do armazenamento ficheiro rtcToolsConfig.xml ... 27
Figura 10: Características hidráulicas da turbina ficheiro rtcToolsConfig.xml ... 27
Figura 11: Lei do Descarregador de superfície ... 28
Figura 12: Descarga máxima de superfície, ficheiro rtcToolsConfig.xml ... 28
Figura 13: Variáveis do problema exemplo ... 29
Figura 14: Ficheiro rtcRuntimeConfig.xml ... 29
Figura 15: Ficheiro rtcDataConfig.xml ... 30
Figura 16: Ficheiro timeseries_import.xml, Iobs ... 30
Figura 17: Ficheiro timeseries_import.xml, dados I.obs ... 31
Figura 18: Ficheiro timeseries_import , Q.opt ... 32
Figura 19: Ficheiro exportSeries.xml ... 32
Figura 20: Ficheiro rtcObjectiveConfig.xml ... 33
Figura 21: Ficheiro state_import.xml, condições iniciais ... 34
Figura 22: Caudal afluente à barragem ... 35
Figura 23: Caudal turbinado ótimo ... 35
Figura 24: Variação da cota de superfície livre ... 35
Figura 25: Variação da capacidade de armazenamento da barragem ... 36
Figura 26: Caudal descarregado pelo descarregador de superfície ... 36
Figura 27: Bacia Hidrográfica Rio Lima ... 39
Figura 28: Circuito hidráulico do aproveitamento hidroelétrico do Alto Lindoso (Declaração Ambiental, 2011)... 41
Figura 29: Lei do Descarregador de superfície do Alto Lindoso ... 43
Figura 30: Hidrograma do caudal médio diário afluente ao Alto Lindoso, entre 01/12/2000 e 01/04/2001 ... 43
Figura 31: Hidrograma caudal afluente 1º situação ... 44
Figura 32: Caudal turbinado 1º situação... 44
Figura 34: Cota superfície Livre 1º situação ... 45
Figura 35: Capacidade de Armazenamento 1ª situação... 46
Figura 36: Somatório acumulado do caudal descarregado 1º situação ... 46
Figura 37: Hidrograma caudal afluente 2º situação ... 48
Figura 38: Gráfico do caudal turbinado 2º situação ... 48
Figura 39: Gráfico do caudal descarregado pelo descarregador de superfície 2º situação ... 49
Figura 40: Gráfico das cotas da superfície livre 2ª situação ... 49
Figura 41: Gráfico da capacidade de armazenamento 2ª situação ... 50
1.1. Generalidades
A água desempenha um papel fundamental como suporte de vida de seres vivos e ecossistemas. É usada para abastecimento público, em irrigação, como meio recetor de águas residuais, produção industrial, na produção de energia elétrica, como meio de transporte, entre muitas outras utilizações. É também uma ameaça em algumas situações. Especialmente em zonas planas pessoas e infraestruturas têm que ser protegidas contra inundações provocadas por marés vivas, tempestades e caudais fluviais em períodos de longa e intensa precipitação.
Tendo em vista, quer o aproveitamento para as suas diferentes utilizações quer a mitigação de efeitos de cheias construíram-se infraestruturas hidráulicas, tais como, barragens, canais, ou açudes, nas bacias hidrográficas, como forma de gerir este recurso. Estas obras são controladas com recurso a estruturas hidráulicas de controlo cuja operação deverá obedecer a critérios otimizados bem definidos. Do seu correto funcionamento quer a curto, a médio ou longo prazo depende, a eficiência do processo de operação e gestão inerentes aos usos definidos na conceção dos aproveitamentos hidráulicos. No controlo das estruturas hidráulicas podem ser aplicadas quer metodologias simples baseadas em regras de operação ou metodologias mais complexas suportadas por técnicas de previsão e otimização, dependendo da informação e tecnologias disponíveis para esta tarefa. No entanto, o uso de computadores tem facilitado a utilização das metodologias mais complexas e também mais eficientes, de controlo sendo bastante comuns atualmente várias soluções de software que permitem a implementação de controladores avançados de sistemas hidráulicos.
Uma dessas técnicas é o controlo baseado em modelos de previsão (MPC – Model Predictive
Control) que será o método de controlo aplicado na gestão de infraestruturas hidráulicas objeto
deste trabalho. Este método implica a utilização de modelos de previsão e técnicas de otimização que determinam a definição de uma função objetivo e de restrições à solução obtida pelo MPC.
1.2. Objetivos
O principal objetivo do presente trabalho consistiu na caracterização e aplicação de uma ferramenta avançada para implementação de técnicas de controlo de estruturas hidráulicas. Para tal definiram-se os seguintes objetivos específicos:
- Caracterização de diferentes técnicas de controlo de estruturas hidráulicas;
- Estudo da ferramenta RTCTools e análise da informação necessária à sua aplicação a aproveitamentos hidroelétricos;
- Caracterização da técnica de controlo baseada em modelo de previsão (MPC); - Aplicação da técnica MPC a um aproveitamento hidroelétrico.
1.3. Estrutura da Dissertação
A dissertação encontra-se organizada em cinco capítulos.
O capítulo 1, Introdução, contém generalidades, os objetivos e a estrutura do documento.
O capítulo 2, Operação de estruturas hidráulicas, apresenta uma caracterização dos diferentes métodos de controlo utilizados em diferentes sistemas. Apresenta ainda a técnica Model Predictive Control, os campos de aplicação do método, bem como uma descrição explicativa e detalhada, das suas diferentes componentes.
O capítulo 3 Programa RTCTools, apresenta uma descrição informática assente num exemplo prático, da técnica MPC. Contém uma listagem da informação necessária à sua implementação, incluindo os conteúdos dos diferentes ficheiros XML utilizados no software (RTC-Tools).
O capítulo 4, Aplicação ao caso em estudo, apresenta a aplicação ao caso em estudo, tendo em conta a configuração apresentada no capítulo anterior.
O capítulo 5, Conclusões, é referente às conclusões obtidas no âmbito da realização desta dissertação.
2. OPERAÇÃO DE ESTRUTURAS HIDRÁULICAS
2.1. Generalidades
Para gerir as diferentes estruturas hidráulicas, as empresas responsáveis pelas mesmas, possuem postos de controlo posicionados estrategicamente onde trabalham operadores especializados no controlo e gestão das diferentes estruturas hidráulicas, podendo-se alterar o caudal, tendo em conta informações atuais e previsões de mudanças futuras dos sistemas, de forma a satisfazer as necessidades (Bosgra, 2003).
Estes operadores comunicam as ações requeridas a operados locais responsáveis por alterar as configurações da estrutura hidráulica, como por exemplo, abrir ou fechar uma comporta de uma barragem. Usualmente os operadores gerem o sistema tendo em conta um determinado nível de água.
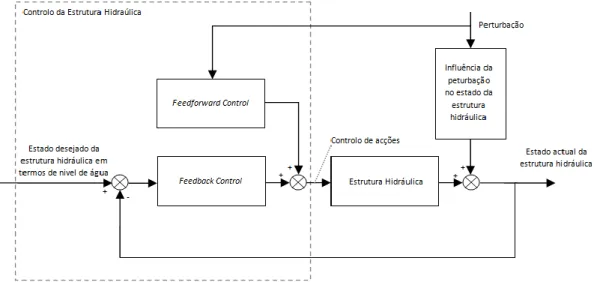
A gestão do sistema pode ser sintetizada no diagrama apresentado na figura 1. O controlador de
feedback corrige os desvios medidos do ponto de ajuste, enquanto o controlador feedforward
utiliza uma estimativa da perturbação aplicada ao sistema, para contrariar o peso da influência desse distúrbio sobre o nível da água no sistema. Este diagrama é válido tanto para controlo central como para o controlo local, embora no controlo local, geralmente só se aplique o controlo feedback.
Apesar do principal objetivo dos operadores ser, manter os níveis de água do sistema hidráulico, um objetivo secundário é conseguir isso com o mínimo de esforço e custo.
2.2. Automação na gestão da água
O uso de controlo automático na gestão de sistemas hidráulicos evoluiu lentamente ao longo das últimas décadas. Existem dois tipos de automação: a mecânica e a elétrica. O primeiro tipo utiliza estruturas compostas por flutuadores e alavancas ligados às comportas de maneira a que um determinado objetivo de gestão de água seja alcançado. O segundo tipo está configurado da seguinte forma: sensores de nível automático de água, linhas de cabo ligadas a um Controlador Lógico Programável em que os ajustamentos das estruturas são calculados e transmitidos às estruturas motorizadas (Burt & Piao, 2002). A escolha da configuração do sistema de gestão e do método de controlo apropriado para funcionar adequadamente depende completamente das especificações do sistema de água controlado. Estas especificações incluem os seguintes requisitos: uma variedade de pontos de operação regulares; uma indicação de quanto o nível de água e o caudal podem oscilar em torno do valor nominal dentro destes pontos de operação; quanto tempo o nível de água e o caudal podem estar fora do permitido e quantas vezes as estruturas podem ser ajustada. Mesmo que os operadores sejam vagos sobre as especificações exatas são, depois de alguma discussão, as especificações geralmente estipuladas para o controlo, ou seja, manter os níveis de água o mais próximo possível do valor máximo permitido e com o mínimo de ajustes às estruturas possível. No caso de serem utilizadas bombas, um requisito adicional é usar o mínimo de energia possível.
2.3. Controlo de estruturas Hidráulicas
O controlo de estruturas hidráulicas pode ser formalizado por um conjunto de regras lógicas e matemáticas. Os diferentes tipos de controladores podem ser classificados da seguinte forma (Brouwer, 2001):
Controlo de caudal. Um certo caudal é definido para uma estrutura, através das suas configurações, como a largura da comporta ou a sua abertura;
Controlo de volume. O volume alcançado no canal é mantido o mais próximo possível de um volume destino possível (Seatzu & Usai,2002).
Controlo do nível de água. Os níveis de água que o canal alcança são mantidos num determinado nível de água predefinido.
Outra forma de classificação possível baseia-se na localização do nível de água que tem que ser mantida perto de um nível alvo em relação à estrutura de controlo:
Controlo a jusante. O nível de água a jusante da estrutura de controlo é mantido o mais próximo possível do nível especificado Ao aplicar este método a escassez de água no canal a jusante, é alimentada através da estrutura de controlo a montante. Esta propriedade faz com que o controlo a jusante, seja adequado para o controlo de sistemas de irrigação.
Controlo a montante. O nível da água a montante da estrutura de controlo é mantido o mais próximo possível do nível especificado. Ao aplicar este método, a água em excesso a montante é descarregada através da estrutura de controlo para jusante. Esta propriedade faz com que o controlo a montante seja mais adequado para o controlo dos sistemas de drenagem;
Em vez de a categorização com base nas características de gestão da água como apresentado acima, a próxima classificação é baseada na teoria de controlo geral:
Controlo feedback. Controlos Feedback (ver figura 2a)) medem o nível de água, compara esse nível com o nível alvo e calcula a alteração na configuração da estrutura como uma função do desvio. Muitas vezes, este é um controlador Proporcional Integral (PIcontroller) em que a mudança na configuração da estrutura é calculada a partir de um fator de acréscimo proporcional a um fator de acréscimo integral multiplicado pela mudança de erro e o erro em si, respetivamente. Se os acréscimos estão bem
sincronizados, o sistema controlado será estável, razoavelmente rápido e sem grandes diferenças na definição da estrutura. O controlador de feedback corrige constantemente a diferença entre o nível da água medido e o nível objetivo através de um processo repetitivo. Por essa razão, este método de controlo é geralmente referido como controlo em circuito fechado.
Controlo feedforward. Controlos Feedforward (ver figura 2b)) usam as medições ou previsões de uma perturbação e um modelo inverso do efeito dessa perturbação no nível da água, para calcular os ajustes necessários para as estruturas. Este método de controlo
é geralmente referido como de controlo de estruturas hidráulicas em circuito aberto. Como o modelo inverso nunca pode representar perfeitamente o inverso do efeito da perturbação sobre o nível de água real, medições e previsões são frequentemente imprecisas e o comportamento dinâmico da estrutura hidráulica muda ao longo do tempo, este desvio nunca será nulo. Uma combinação de feedback e feedforward é muitas vezes usado para que a ação de controlo de feedback compensar a imperfeição da ação de controlo feedforward.
Controlo Otimizado. O mais comum dos controladores a utilizar otimização é baseado na teoria Linear Quadratic Regulator. Esses controladores têm como função minimizar uma função objetivo usando um algoritmo numérico de otimização.
2.4. Controlo Baseado em Modelos de Previsão
2.4.1. Generalidades
A gestão dos sistemas de água modernos requer métodos de controlo mais avançados do que o
feedback clássico e feedforward. Isto, devido a duas razões principais. Primeiro, porque as
restrições das estruturas de controlo limitam as características do sistema de água. Por exemplo, as bombas que bombeiam a água para fora de um sistema de drenagem têm uma capacidade limitada, por isso, o armazenamento disponível no sistema deve ser utilizado ao máximo pelo controlador da bomba. Em segundo lugar, as exigências sobre a flexibilidade de um sistema de água controlado aumentam ao longo do tempo devido ao desenvolvimento sócio- económico.
O controlador de feedback reage quando a perturbação faz com que o nível da água suba. Como este controlador só reage depois de ocorrer um desvio, a sua reação é sempre tardia. Por exemplo, num sistema de drenagem, quando o caudal de descarga se torna maior do que a capacidade máxima das bombas, a descarga é limitada e, eventualmente, o nível da água subirá para valores maiores que os permitidos.
O controlador de feedback juntamente com o controlador feedforward, usam a previsão do efeito que a perturbação tem sobre o nível de água tentando neutraliza-la, a fim de manter o nível da água a zero. Isso funciona bem até que o caudal exceda a capacidade máxima da bomba. Também com este método de controlo, poderá ser violada a restrição do nível de água máximo permitido.
O controlo baseado em modelo de previsão (MPC) utiliza a mesma previsão da perturbação. Aplica-se uma função objetivo em que o valor nominal do nível de água é minimizado ao longo de uma previsão futura. O MPC utiliza informações sobre as restrições do caudal, para que se possa prever os níveis de água elevados no final da previsão. Para minimizar as oscilações do nível de água ao longo de todo o período de previsão, o controlador MPC inicia mais cedo a operação das bombas para baixar o nível da água antes da perturbação acontecer. Desta forma, o nível máximo de água permitido é violado, mas em um grau muito inferior.
Estes tipos de controladores emergiram da indústria química na década de 70 (Mosca (1995)). Boom e Backx (2001) descrevem a história da evolução da metodologia de controlo.
Basicamente são necessários estes tipos de controladores, como os produtos feitos neste sector são fabricados muito perto dos limites das especificações de qualidade. Isso requer um método de controlo que pode trabalhar perto das restrições usando informações dessas restrições.
A Figura 3 apresenta um diagrama de blocos de um sistema de água controlado por um controlador MPC, apresentando as seguintes componentes:
Modelo interno. Em qualquer previsão é necessário um modelo para prever os níveis de água e caudal no sistema, como resultado do caudal de perturbação e o caudal de controlo.
Função objetivo. Esta função caracteriza o objetivo de controlo das estruturas hidráulicas. O objetivo global pode ser definido a partir de sub-objetivos eventualmente contraditórios. Cada um dos sub-objetivos é ponderado utilizando-se um fator de penalidade relativa para o objetivo global. Todas as parcelas afetadas dos fatores de penalidade adicionadas constituem a função objetivo. Os sub-objetivos podem ser a oscilação do nível de água entre os valores nominais ponderados, o consumo de energia que é necessária para manter essa pequena oscilação, entre outros.
Restrições. As restrições são limitações impostas à solução calculada pelo controlador MPC. Essas limitações podem ser de natureza física ou consistir em especificações operacionais. O controlador do sistema não está autorizado a calcular uma solução que viole estas limitações físicas. Além disso, as especificações operacionais são impostas sobre a solução, como os níveis de água que devem permanecer dentro de um determinado intervalo em torno do valor nominal ou estruturas que não estão autorizados a ser operadas com mais frequência do que um determinado período de tempo mínimo.
Otimização. A função objetivo tem de ser minimizada por meio de um algoritmo numérico de otimização. Nessa otimização consideram-se as restrições definidas.
Receding horizon. Em cada passo de otimização, o resultado em circuito aberto, é calculado ao longo do tempo de previsão. Ao longo desse tempo, as ações de controlo necessárias e as cotas dos níveis de água são apresentados. Num Sistema de Apoio à Decisão (SAD), esta informação constitui uma grande a ajuda para os operadores do sistema, uma vez que com estes resultados podem estimar as trajetórias futuras do sistema com base nas atuais previsões. Mesmo que as ações de controlo ao longo de todo o tempo de previsão sejam calculadas, apenas a primeira ação de controlo é de
facto implementada em circuito fechado. Depois de um passo de tempo todo o processo de otimização é repetido. Desta forma, em circuito aberto o processo de otimização retrocede, sempre, utilizando as medições e previsões mais recentes.
Figura 3: Diagrama de blocos do MPC num sistema atual (van Overloop, 2006)
Como apresentado por Xu e Schwanenberg (2012), existem dois tipos de formulações para controladores MPC, resultantes da respetiva configuração: simultânea ou sequencial. A primeira usa o modelo interno como uma restrição de igualdade no problema de otimização enquanto a segunda aplica a simulação do modelo para cada passo da iteração do otimizador dentro do cálculo da função objetivo.
Considera-se a seguinte forma discreta explícita do modelo interno:
(
)
(1)Onde, x=estado do sistema; u=variáveis de controlo; d=perturbações; k=índice de passo de tempo.
As duas formulações podem ser descritas do seguinte modo: Formulação simultânea:
n k k k k u x J x u d 1 , ( , , ) min 0 ) ( e 0 ) , ( : a sujeito g xk uk huk (2) (3) Formulação sequencial:
n k k k u J x u d u 1 ) ), , ( ~ ( min 0 ) ( : a sujeito h uk (4) (5)Onde, J=função objetivo; x~ =estado do sistema de acordo com a simulação do modelo executado; n=horizonte de previsão.
No MPC simultâneo o modelo interno é definido pelas restrições de igualdade definidas pela Eq. 3, enquanto que na abordagem sequencial é utilizada a simulação dos estados do sistema na função objetivo definida pela Eq. 4. Xu e Schwanenberg (2012), mostraram que no caso de albufeiras, a formulação sequencial é mais rápida que a simultânea uma vez que o número de variáveis no problema de otimização é reduzido e a inclusão do modelo é mais direta.
Por motivos de desempenho, os otimizadores utilizam preferencialmente dentro do MPC o gradiente da função objetivo em relação a cada uma das variáveis de controlo. Isto reduz o tempo de computação tanto para a formulação simultânea como sequencial. O cálculo do gradiente é simples quando se utiliza a formulação simultânea. Em contrapartida na abordagem sequencial torna-se necessária a diferenciação numérica do modelo de simulação recorrendo-se a técnicas de diferenciação numérica (Griewank e Walther, 2008).
No programa RTC-Tools, o problema da otimização é formulado usando a abordagem sequencial. Utiliza-se um modelo adjunto para fornecer o gradiente da função objetivo e um otimizador não linear, neste caso IPOPT (Wächter e Biegler, 2006), parava obtenção de variáveis de controlo ao longo da previsão.
De seguida, apresentam-se as componentes principais do controlador MPC, com as configurações para sistemas de massas de água superficial. Apresenta-se uma breve história do programa e o campo de aplicações do mesmo.
2.4.2. Desenvolvimento do Programa RTC-Tools
O software RTC-Tools tem origem a partir da integração de vários módulos de simulação de projetos específicos de sistemas de previsão de inundação para bacias hidrográficas na Áustria, Alemanha e Paquistão. O seu desenvolvimento original, em Java, em 2007, também conhecido como Delft-FEWS-Módulo Reservatório, visa a simulação em albufeiras, incluindo controladores de feedback e regras de operação.
A partir de 2008 foram introduzidos recursos para apoiar uma versão sequencial não linear do MPC. Estes desenvolvimentos incluíram a implementação de modelos hidráulicos simplificados, tais como, modelos de onda cinemática ou de onda difusa como alternativas para implementar o modelo interno do controlador, bem como a introdução de técnicas adequadas ao cálculo de gradientes (modelos adjuntos). Este último desenvolvimento resultou em aumentos significativos do desempenho destes controladores.
Em 2010, são introduzidos melhoramentos que permitem a conceção de controladores com possibilidades de os ligar e desligar de modo automático e a inclusão de regras de funcionamento complexas. O software foi implementado em linguagem de programação C++ e foi ainda considerada uma interface C# OpenMI/DeltaShell para integração em pacotes de modelação tais como, SOBEK ou Delft3D. Além disso, foram considerados formatos de dados e resultados compatíveis com as regras de desenvolvimento de software de modelação OpenDA, permitindo deste modo a implementação de aplicações automáticas de calibração e de simulação.
Em 2011, o programa foi integrado na plataforma de desenvolvimento DeltaShell, para substituir as funcionalidades existentes de Real Time Control no programa SOBEK no contexto da Deltares Next Generation Hydrosoftware development. A decisão de tornar de acesso livre o programa RTC-Tools foi tomada em 2012.
O programa RTC-Tools tem como objetivo permitir a implementação de várias técnicas de controlo em tempo real. Devido à necessidade de configuração interna dos controladores a
ferramenta inclui uma série de modelos de configuração simples. Estes permitem também a sua utilização autónoma em sistemas de previsão. Além disso, a interface OpenMI permite que o utilizador associe a ferramenta a um vasto conjunto de pacotes de modelação hidráulica.
O software não visa uma simulação detalhada de grandes sistemas de recursos hídricos, não incluindo qualquer interface gráfica com o utilizador ou apoio à gestão dos casos de implementação. No entanto, pretende-se resolver os problemas específicos relacionados com Controlo em Tempo Real (CTR) que podem ser integrados em sistemas de maiores dimensões. Para dar suporte a esse recurso, o software fornece ligação para outros sistemas de previsão na plataforma Delft-FEWS (Interface PI-XML) e pacotes de modelação, tais como SOBEK e Delft3D via OpenMI. Este último recurso permite que um utilizador combine as regras de funcionamento e controlo do RTC-Tools com componentes hidráulicas de modelação mais detalhadas dos pacotes de modelação hidráulica (ver Figura 4).
Figura 4: Arquitetura e interfaces da RTC-Tools (RTC Manual)
2.4.3. Campos de Aplicação
O programa RTCTools visa a simulação de várias técnicas de controlo e suporte à decisão em tempo real, aplicadas aos sistemas de recursos hídricos. Inclui estratégias de controlo de
feedback, regras de funcionamento e controladores, tais como, MPC com definições padrão
Como já foi referido anteriormente o MPC requer a definição de um modelo interno de previsão do comportamento do sistema controlado no processo de otimização. Para tal o programa inclui modelos hidrológicos e hidráulicos simplificados, bem como vários outras componentes de simulação para a criação de modelos de recursos hídricos. A implementação do modelo, reflete os requisitos do processo de otimização, fornecendo tanto um modo de simulação como o modo de simulação adjunto. Tendo em vista a sua aplicação em sistemas de previsão operacionais, o software dá especial atenção manipulação do estado dos sistemas a controlar. Isso inclui, por definição, os estados do sistema de todas as componentes existentes, tais como, condições-limite, controladores, regras de funcionamento e componentes de simulação.
O programa RTC-Tools foi desenvolvido para utilização autónoma ou para ser incluído como um módulo de sistemas mais abrangentes. Foi dada especial atenção a várias interfaces para a sua integração, tais como, Delft-FEWS, Matlab ou OpenDA. Além disso, a interface OpenMI permite a sua ligação a uma vasta gama de pacotes de modelação hidráulica.
Os seguintes exemplos apresentam três aplicações típicas do programa RTC-Tools:
1. Como um modelo de previsão na plataforma Delft-FEWS: Assumindo-se que é necessário um modelo de previsão para uma bacia hidrográfica de tamanho médio, incluindo um modelo hidrológico que pode ser implementado com o modelo HBV, é possível implementar uma configuração hidráulica simples das componentes da bacia e a integração de vários sistemas de albufeiras controladas. Embora muitos outros modelos forneçam os recursos necessários para este tipo de implementação, o programa RTC-Tools pode ser vantajoso, porque permite a representação completa do sistema num único modelo e uma integração perfeita em Delft-FEWS com um mínimo de esforço de configuração e máxima interação.
2. Aplicação integrada com modelos hidráulicos sofisticados via OpenMI (Gregersen et al., 2007): Modelos hidráulicos típicos, tais como, SOBEK, Mike11 ou HEC-RAS possuem características para modelar o controlo em tempo real de estruturas
hidráulicas. Se forem necessários mais recursos avançados para além dos disponíveis, existem interfaces APIs que permitir ao utilizador ligar ao código externo. A vantagem principal do RTC-Tools neste caso é a disponibilidade de uma grande variedade de
recursos, a opção de os desenvolver e/ou modificá-los facilmente, e uma compatibilidade com ficheiros de input/output e com as interfaces.
3. Controlo baseado em previsão de estruturas hidráulicas: em particular utilizando-se sistema de previsão, MPC, constitui uma opção para a implementação de controladores supervisionados, utilizados na tomada de decisões por exemplo, para a programação do funcionamento de bombas hidráulicas ou em sistemas de retenção de água na definição dos caudais a descarregar em barragens.
2.4.4. Modelo Interno de Previsão
O MPC utiliza um modelo interno para prever estados futuros do sistema. O modelo interno deve ser uma representação bastante precisa do sistema real. Essa representação bastante precisa do sistema é o mais difícil de definir com antecedência (van Overloop, 2006). Este modelo é executado num processo iterativo dentro de um processo de otimização, a fim de obter as varáveis de controlo que minimizem a função objetivo.
Como em qualquer sistema real, o sistema de água alvo de estudo é não linear. De forma a ser possível usar álgebra linear e ferramentas computacionais disponíveis para a resolução do caso de estudo é preferível converter estes subsistemas não lineares em sistemas lineares. A não linearidade dos caudais pode ser eliminada no caso de os caudais serem utilizados como dados de entrada no modelo interno, em vez da abertura da comporta (van Overloop, 2006).
2.4.5. Equações Aplicadas nos Modelos Internos de Previsão
O comportamento variável, de massas de água com superfície livre podem ser descritos utilizando as equações de St. Venant, que consiste num conjunto de equações que traduzem os princípios de conservação de massa e de quantidade de movimento. O sistema de equações de Navier-Stokes estabelecido em três dimensões (Anderson, 1995) pode ser reduzido a uma dimensão após serem retirados os termos de velocidade ortogonais à direção do escoamento. O sistema de equações, na sua forma conservativa, para uma dimensão é dado por:
(6)
(
) (
)
(7)Onde t=tempo; x= coordenada unidimensional na direção do escoamento; A=área molhada; Q=caudal; P=Pressão; = Coeficiente Boussinesq; = massa volúmica da água; S0= inclinação
do canal; Se= inclinação da linha de energia; g= aceleração da gravidade. A equação (6)
corresponde à conservação da massa enquanto que a equação (7), descreve a conservação da quantidade de movimento.
O modelo de onda difusiva considera a equação de balanço de massa, mas apenas os termos correspondentes ao gradiente de pressão, às forças gravíticas e ao atrito na equação de conservação da quantidade de movimento. A aceleração do escoamento é descrita pela derivada total do caudal em ordem ao tempo que contém a aceleração local (dQ/dt) e a aceleração convectiva (d/dx(Q2/A)). Desprezando o termo convectivo da equação de conservação de quantidade de movimento, assumindo a distribuição de pressões do tipo hidrostático e aproximando a inclinação da linha de energia (Se) a partir da fórmula Chezy, obtemos o
seguinte sistema simplificado em termos de altura de água e caudal:
(8)
(
| |)
(9)Onde, h= altura de água; B= largura do canal; C= coeficiente Chezy; R=raio hidráulico
NOTA: A equação Chezy indica que a velocidade média (U) é proporcional à raiz quadrada do produto do raio hidráulico pelo declive do canal. O coeficiente Chezy C
apresenta a relação entre essas variáveis: U C RS onde R é o raio hidráulico e S o declive.
É importante perceber que a largura, o coeficiente de rugosidade e a área da secção transversal geralmente dependem da altura de água, o que significa que a equação diferencial de conservação da quantidade de movimento tem um comportamento não linear.
Além disso a geometria da secção transversal pode ter uma influência significativa no cálculo do fator de atrito. A superfície de inundação, por exemplo, produz uma forte mudança no fator de transporte que pode criar um comportamento não-monotónico na curva de classificação, implicando instabilidades na aproximação numérica, se não tratada convenientemente. O seguinte cálculo descreve uma condição monotónica que evita tais instabilidades. A secção transversal é dividida num canal principal e numa superfície de inundação onde o caudal é dado por:
√ √ ∑ (∑ √ ) √ (10)
Onde T=é um índice que representa a totalidade da secção transversal; K=fator de transporte; A=área molhada; C=coeficiente Chezy; R=raio hidráulico; S=declive i=índice da divisão considerada na secção transversal.
Então, o fator de transporte, também chamado fator de transporte, é dado por:
√ ∑( √ ) (11)
Portanto, na presença de uma secção podemos utilizar o cálculo normal da secção transversal (que pode apresentar instabilidades para cálculos de caudais), ou a versão melhorada, em cima mencionada que implica a divisão da secção em secções parcelares, resultando numa função do transporte monotónico (Montero, 2012). O uso de um fator total de transporte (claramente depende da elevação da água) resulta na seguinte modificação da equação de conservação de quantidade de movimento:
(
| |)
(12)Uma opção equivalente à utilização do termo de transporte melhorado é dividir toda a secção transversal em duas ou mais secções parcelares, uma que reflita as caraterísticas do canal principal e outra (ou mais) para a superfície de inundação. Desta forma, cada secção parcelar mantém um comportamento monotónico do fator de transporte para o cálculo do caudal. A partição da secção transversal em secções parcelares, implica um valor acrescentado que proporciona uma abordagem mais realista. No entanto, também aumenta o número de equações de quantidade de movimento a serem resolvidas e pode alterar drasticamente o desempenho do modelo interno na aplicação MPC.
2.4.6. Esquema de Discretização
As equações diferenciais parciais descritas em cima podem ser resolvidas numericamente aplicando um método de diferenças finitas aplicado a uma malha em que os níveis de água são calculados em cada nó i e o caudal em cada ramo i0,5 conectando com outros nós como se pode ver na figura seguinte
.
Figura 5: Esquema de uma malha e o fluxo de informação para calcular um intervalo de tempo
O sistema definido pelas equações (8) (9) ou (8) e (12) pode ser discretizado usando a primeira ordem da série de Taylor para obter uma formulação explícita do problema em seis formas possíveis. Estas correspondem às combinações de cálculo de h e Q no instante k+1 da informação disponível em um dado instante de tempo k, segundo a qual a equação é resolvida primeiro. Por exemplo, uma vez que as alturas de água hk+1 foram calculadas a partir da equação da continuidade, os caudais Qk+1 pode ser calculado ou com os valores da altura de água do momento anterior k ou com os novos valores de tempo k+1. O fator de atrito também pode ser calculado usando, em parte, os novos valores do caudal de tal forma que a energia devido a inclinação do terreno é dada por:
| | ( ) (13) hi-1 Q hi hi+1 i-0.5 Qi-1.5 Qi+0.5 Time k Time k+1
A figura seguinte mostra as diferentes combinações de cada caso. Casos de 2 a 6 são chamados esquemas semi-implícitos fracos, uma vez que levam em conta valores do instante de tempo k+1,
mas eles podem ainda ser formulados de uma forma explícita. O caso 3 por exemplo, usa os valores da altura de água do instante de tempo seguinte, calculado a partir da equação da continuidade, para resolver a equação de momento. Neste caso, os valores de elevação da água no próximo instante de tempo já estão disponíveis para cada nó do sistema resolvendo a equação de momento.
Testes numéricos simples mostram que os casos 4 e 6 são casos mais estáveis para a abordagem semi-implícita uma vez que estes poderiam manter a estabilidade dos instantes de tempo sensivelmente 10 vezes maior do que aqueles que causam instabilidades para os outros casos. Os casos 4 e 6 correspondem de facto a formulações semi-implícitas do fator de atrito. No caso prático será usado o caso 6 pois foi o escolhido como a opção mais apropriada entre os casos semi-implícitos fracos, em que o caudal e a altura de água são calculados da seguinte forma:
(
| |)
(
)
(14)(
)
(15)Onde ∆t=intervalo de tempo; ∆x=distância entre nós; B=largura de armazenamento; i=índice do nó
É importante referir que os valores de B, C, A e R são calculados a partir da altura de água no instante k. Caso contrário, o sistema tornar-se-ia fortemente implícito e não-linear.
A principal vantagem da utilização de um regime semi-implícito fraco é que este não requer uma configuração de um sistema de equações lineares para ser resolvido, como é o caso de um regime semi-implícito forte, por essa razão, o cálculo de um único instante de tempo é feito de uma forma mais rápida. No entanto, estes sistemas podem tornar-se instáveis para passos de tempo longos e, portanto, não são recomendados para grandes períodos de previsões.
2.4.7. Função Objetivo
A função objetivo formaliza o objetivo que o controlador pretende alcançar. A função objetivo contém sub-objetivos que são também tidos em conta podendo estes ser penalizadores no resultado. A estes sub-objetivos são atribuídos fatores de penalização que indicam a importância relativa de cada sub-objetivo. A quando da atribuição desses fatores de penalização pode ser calculada uma solução quantificada através da minimização da função objetivo. O controlador tem de fazer com que o atual sistema de água seja levado para o estado pretendido. No caso do estado pretendido ser considerado constante, para além do previsto, todos os estados ao longo da previsão X fazem parte da função objetivo. Em geral, trazer o presente estado do sistema de água para o estado desejado, tem de ser realizado com as restrições adequadas aos dados de entrada que controlam o sistema de água (van Overloop, 2006). Consequentemente, os dados de entrada ao longo da previsão U também fazem parte da função objetivo. Os fatores de penalização anteriormente referidos são colocados numa matriz Q que multiplicará pelo vetor X. Na previsão n a matriz Q tornar-se-á uma matriz n vezes Q na diagonal. O peso relativo dos dados de entrada, são colocados numa matriz R. Na previsão n a matriz R tornar-se-á n vezes R na diagonal.
A função objetivo neste trabalho é configurada usando programação quadrática. A razão da aplicação dessa configuração é que, usando o quadrado dos estados e dos dados de entrada, penaliza os desvios positivos e negativos e os desvios absolutos mais elevados são penalizados mais do que o proporcional, devido à potência de 2. Uma vantagem adicional é o cálculo
simples da derivada da função objetivo dado como um problema de programação quadrática. O mínimo da função objetivo pode ser encontrado fazendo a derivada igual a zero. Em ultima análise, a função objetivo ao longo da previsão n é dada como:
(16)
Como os sistemas massas de água com superfície livre são sistemas estáveis, não há necessidade de usar uma previsão infinita na função objetivo, uma vez que, os controladores apenas estão interessados em resultados de horizontes próximos do tempo em que estamos a calcular a previsão.
A Equação 17, apresenta detalhadamente uma formalização da função objetivo que é usada na maioria das aplicações MPC. Demonstra também que a função objetivo pode tornar-se num problema complexo de otimização, quando o tempo de previsão n e o número de sub-sistemas m são grandes.
∑ ∑ {
( )
(
)}
∑
∑
{
( )
(
)}
(17)∑ ∑ {
( )
(
)}
Onde J representa a função objetivo a ser minimizada, n o número de passos ao longo do intervalo de previsão, m o número secções parcelares do canal, I o número de estruturas, ej o
desvio do nível da água do valor nominal, Qe,j a penalização sobre os desvios ej, ∆ej a variação
de nível de água, Q∆e,j a penalização correspondente, ∆uj a mudança na abertura da comporta ou
2.4.8. Restrições
As restrições decorrem de limitações físicas e operacionais subjacentes ao controlo da estrutura hidráulica em estudo. Através das restrições presentes e identificadas para os diferentes casos, o algoritmo de otimização consegue reduzir o domínio de procura da solução. Algumas restrições nunca podem ser negligenciadas pela solução, tais como a capacidade máxima da bomba, a altura máxima das comportas ou quaisquer outras restrições de segurança, podendo com a sua violação danificar os diferentes equipamentos. Outras restrições as designadas restrições suaves (Boom & Backx (2001), Hovland (2004)), são menos rígidas e podem ser violadas, em certa medida. A diferença de implementação dos diferentes tipos de restrições é que as primeiramente referenciadas são aplicadas no processo de otimização enquanto que, as restrições suaves são implementadas como penalidades extra quando o estado ou o valor de entrada viola a sua limitação. A fórmula 18 formaliza as restrições que não podem ser violadas:
( )
( )
(cada linha contém uma desigualdade) (18)
( )
( )
Onde E e F representam matrizes de seleção com valores 1 e -1 que são multiplicadas pelo estado ou valores de entrada a serem limitados. O valor 1 é usado para implementar restrições sobre o estado ou dados de entrada que devem ser superiores a um valor mínimo previsto. As restrições suaves são implementadas usando estados e valores de entrada virtuais.
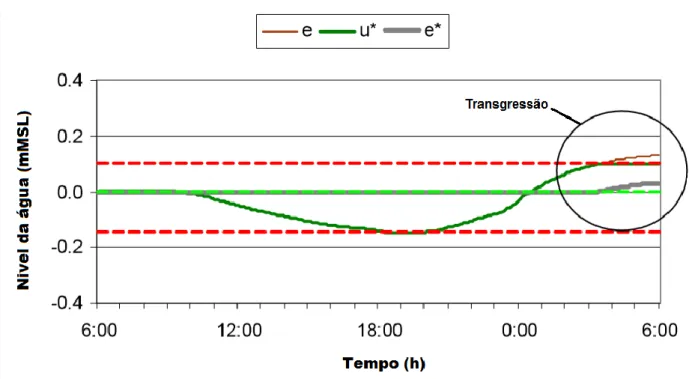
O estado virtual é calculado subtraindo-se à entrada virtual o estado que necessita de ser restringido. Na função objetivo há uma penalidade alta no estado virtual e uma penalidade muito baixa nos valores de entrada virtual. O resultado é que o estado virtual é definido como zero na otimização. Uma restrição rígida (não pode ser violada) é aplicada à entrada virtual que é igual à restrição requerida no estado virtual. O resultado consiste em que o estado virtual é nulo quando o estado que precisa de ser restringido se encontra dentro da sua limitação. No caso de uma transgressão ocorrer, o estado virtual é igual à parte do estado que está fora da restrição. Quando uma penalização sensivelmente maior é dada à parte do estado que está fora da sua restrição, a otimização vai tentar evitar a transgressão. Na seguinte figura é ilustrada uma trajetória típica de e* quando ocorre uma transgressão de uma restrição suave.
Figura 7: Variáveis usadas numa restrição suave (van Overloop, 2006)
A razão pela qual são preferíveis restrições suaves relativamente às restrições rígidas, é que elas garantem a obtenção de uma solução otimizada. A utilização de várias restrições rígidas podem inviabilizar a obtenção de uma solução.
2.4.9. Otimização
A função objetivo ao longo do horizonte de previsão está sujeita a restrições, tais como, estado do sistema ou dados de entrada que necessitam ser calculados e minimizados através da utilização de um algoritmo de otimização. Esse algoritmo de otimização calcula as ações de controlo ao longo do horizonte de previsão que precisam ser implementadas para obter o menor valor possível de J tal como consta na equação 16 apresentada anteriormente.
As restrições determinam se o problema de otimização é exequível. Restrições conflituantes, tais como, os limites permitidos para o erro do nível da água e o caudal permitido para a estrutura podem resultar numa solução que não pode ser executada. No caso de a solução ser possível e executável, uma outra característica do problema de otimização é que necessita de ser possível encontrar um único mínimo global da função objetivo. O problema de otimização deve ser convexo (van Overloop, 2006). Quando as restrições não são dependentes umas das
outras e são caracterizados apenas por um valor máximo e mínimo permitido e a função objetivo por si só é convexa, o problema de otimização geralmente é convexo.
3. PROGRAMA RTCTools
3.1. Configuração em XML
A configuração RTC-Tools é especificada em um conjunto de arquivos XML de acordo com a tabela A.1
Tabela 1: Arquivos de configuração RTC-Tools
Arquivo Conteúdo Uso
rtcDataConfig.xml Definição de séries temporais, definição de interfaces para arquivos io, troca de dados em memória, etc
Requerido
rtcObjectiveConfig.xml definição do problema de otimização, incluindo as variáveis de controlo, restrições e termos de função de custo
Opcional
rtcParameterConfig.xml conjunto de parâmetros exteriorizados para a modificação em aplicações externas, tais como, Delft-FEWS ou Matlab
Opcional
rtcRuntimeConfig.xml Informação relevante sobre o tempo de execução: tempo de cada iteração, tempo de simulação, os nomes dos arquivos que não sigam a nomenclutura padrão, o modo de executar (simulação, otimização, etc..), informações de registo, etc
Requerido
rtcScenarioTreeConfig.xml definição de um cenário para a opção MPC Tree-Based Opcional
rtcToolsConfig.xml Esquematização RTC Tools incluindo os componentes de modelação, regras e controladores, bem como desencadeador da definição do modo de um cenário para a opção MPC Tree-Based
Requerido
3.2. Condições iniciais
Os ficheiros de configuração do programa RTC-Tools a definir em primeiro lugar são as séries temporais e os modelos de estado: (timeseries.xsd state.xsd) e o ficheiro treeVector.xsd.
O utilizador é o responsável por fornecer as condições iniciais do modelo no ficheiro state
import.xml de acordo com o formato OpenDA treeVector.xsd. Note-se que mais nenhuma
informação sobre data e hora do estado será necessária, uma vez que o período de execução do modelo já está definido nas definições do tempo de execução (ver tabela 1). O estado export.xml é gerado pelo programa RTC-Tools e incluí o estado da última fase de otimização utilizando mais uma vez o formato OpenDA treeVector.xsd e as informações para a visualização no Delft-FEWS são incluídas no ficheiro statePI.xml.
3.3. RTC-Tools – Exemplo de Aplicação
3.3.1. Barragem
Um dos exemplos distribuídos com o software RTCTools refere-se a uma barragem cujo controlo é objeto de implementação recorrendo-se à técnica MPC. Utiliza-se este exemplo para ilustrar a aplicação do programa e detalhar toda a informação necessária à sua implementação. A geometria do problema e as características dos órgãos de descarga foram inferidos dos dados presentes no ficheiro de configuração: rtcToolsConfig.xml.
3.3.2. Geometria do problema
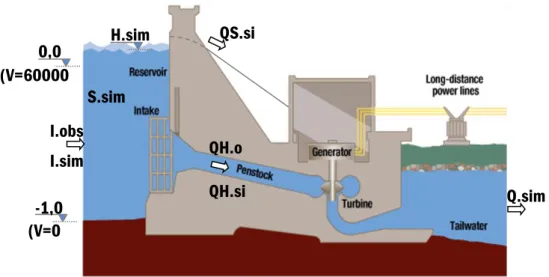
A barragem (Fig. 8) é utilizada para produção de energia. Apresenta uma turbina, que será objeto de controlo, e um descarregador de superfície não controlado. As dimensões do problema apresentadas no esquema são, naturalmente teóricas As varáveis do problema são: I=Caudal afluente à barragem; H=Altura superfície livre da água; QS=Caudal descarregado através do descarregador de superfície; QH= Caudal turbinado
Figura 8: Exemplo de uma barragem hidroelétrica
Pegando no exemplo meramente teórico apresentado e tendo em conta as regras de configuração do software RTCTools, apresenta-se a uma descrição detalhada de como proceder neste exemplo, servindo de base à aplicação do programa à situação do caso de estudo real.
-1,0 0,0 (V=0 m3) (V=60000 m3) QH.o QH.si I.obs I.sim S.sim QS.si Q.sim H.sim
3.3.3. Características de Armazenamento
As características de armazenamento da albufeira são dadas por uma lei linear: o volume de armazenamento é de 0 m3 à cota -1,0 e de 60000 m3 à cota 0,0 m.
Figura 9: Características do armazenamento ficheiro rtcToolsConfig.xml
Pode-se ver através da fig. 9, a forma como foram codificados as características de armazenamento da barragem. Foi considerado, tendo em conta os dados do exemplo, que à cota que coincide com a base do curso de água foi atribuído o valor de 0 m3 e à cota da superfície livre o valor de 60000 m3.
3.3.4. Características Hidráulicas dos Órgãos de Descarga
A capacidade da turbina é de 20 m3/s para níveis na albufeira a variarem entre -1,0 m e 1,0 m. Na fig. 10, está a forma como é introduzida no programa a capacidade da turbina usada para este exemplo. Como dados de entrada e saída temos, respetivamente QH.opt e QH.sim.
Figura 10: Características hidráulicas da turbina ficheiro rtcToolsConfig.xml
A descarga máxima de superfície, y, é regida pela seguinte lei de vazão:
sendo x (=H) o nível na albufeira a=340.98, b= -0,1 e c=1,5. Na fig. 11, apresenta-se a lei traduzida pela equação, enquanto que na fig. 12 como esta é introduzida no programa.
Figura 11: Lei do Descarregador de superfície
Figura 12: Descarga máxima de superfície, ficheiro rtcToolsConfig.xml
Para finalizar a inserção de todos os elementos do ficheiro de configuração: rtcToolsConfig.xml é necessário ainda, enunciar quais os dados a introduzir, bem como as que o RTCTools dará como solução para o nosso problema. Na fig. 13 apresenta-se todas as variáveis do problema exemplo apresentado.
0 20 40 60 80 100 120 0 0,1 0,2 0,3 0,4 0,5 0,6 C au d al ( m 3/s ) Nível (m)
Figura 13: Variáveis do problema exemplo
3.3.5. Ficheiro rtcRuntimeConfig.xml
Outro dos ficheiros cuja configuração é requerida é o ficheiro rtcRuntimeConfig.xml. Neste ficheiro, será colocada toda a informação relevante sobre o tempo de execução: o tempo de cada iteração, tempo da simulação, os nomes dos ficheiros que não sigam a nomenclatura padrão, o modo de execução (simulação, otimização,), informações acerca dos registos, início e fim do período de execução. A figura 14, apresenta a configuração do referido documento para este exemplo prático.
3.3.6. Ficheiro rtcDataConfig.xml
Neste ficheiro definem-se todas as séries temporais, as interfaces para ficheiros de I/O e também como é configurada todas as trocas de dados em memória. Na figura 15, é apresentado detalhadamente alguns dos aspetos a ter em conta, bem como o resultado final para o exemplo apresentado.
Primeiramente são definidas as importSeries como se pode ver na seguinte figura.
2
3
Em 1, é definido o nome do ficheiro onde se encontram as séries temporais que serão importadas e executadas pelo programa RTCTools. Em 2 e 3, é descrito a localização das váriáveis I,obs e Q.opt introduzidas. Na figura 16, é possível visualizar parte do ficheiro
timeseries_import.xml.
Figura 16: Ficheiro timeseries_import.xml, Iobs
1
2
3
Na fig. 16 pode-se observar a localização da variável I.obs, bem como data e hora do início e fim da série temporal escolhida, para o exemplo prático. A data é referente ao dia 01-01-2000, enquanto que a hora corresponde às 00:00:00 até 01:40:00. Em suma, o programa é executado para este período de tempo, no entanto, este poderá ser alterado para qualquer um outro dependendo da situação. Na figura 17, é apresentada a introdução de valores referente à mesma variável identificada na figura anterior. Importante será referir que introdução desses valores é dependente e deve ser a adequada a cada situação.
Figura 17: Ficheiro timeseries_import.xml, dados I.obs
Na figura 18, é apresentada a introdução dos valores referentes a variável Q.opt para o mesmo período de tempo. De referir, que tanto na figura anterior como na seguinte apenas é apresentado uma parte dessa introdução devido à sua extensão.
Figura 18: Ficheiro timeseries_import , Q.opt
Ainda dentro do ficheiro rtcDataConfig.xml são definidas as exportSeries das variáveis I.sim, Q.sim, S.sim e H.sim cujo programa RTCTools vai gerar como resultados em conformidade com a configuração estabelecida no ficheiro ImportSeries.xml. Tal como para as
importSeries na fig.19 apresenta-se o seu conteúdo.
Figura 19: Ficheiro exportSeries.xml
3.3.7. Ficheiro rtcObjectiveConfig
Como é descrito na Tabela 1, o ficheiro rtcObjectiveConfig.xml será configurada a definição do problema que se pretende minimizar no ciclo de otimização, incluindo as variáveis
de controlo, restrições e termos de função de custo. Utilizam-se para a definição desta função objetivo as diferenças entre os valores observados e os valores esperados, que são os considerados mais adequados ao funcionamento do sistema. Neste exemplo consideram-se três parcelas, como é possível ver na fig. 20.
Figura 20: Ficheiro rtcObjectiveConfig.xml
Estes termos implicam somatórios de diferenças entre valores simulados e os valores alvo. No caso de uma albufeira para produção de energia, procura-se que o nível esteja próximo do nível de pleno armazenamento. Então, como se pode ver na fig. 20, o valor alvo (set point) do primeiro termo inserido é 0.0 e o peso com que é considerado no somatório é de 1.0. O segundo termo, que considera as variações de H.sim para o valor de 0.1, o que significa, que a solução ótima tenderá a encontrar soluções de modo a que o nível do reservatório se afaste de 0.1. Esse valor corresponde ao nível da soleira do descarregador da superfície livre a partir do qual existem descargas e em consequência essa água não será turbinada. O peso deste segundo termo na função objetivo é de 10 tendo portanto, uma grande influência na função. Com uma penalização de 0.1, o terceiro termo penaliza as variações de caudal, pois conduzem a frequentes operações da turbina o que implica o desgaste da mesma. Pelo que desta forma se penaliza soluções que impliquem variações intensas e frequentes.
As linhas de código “order” (ordem), correspondem ao expoente a que se elevam as diferenças entre valores simulados e os valores alvo na função objetivo.
3.4. Execução do Programa RTCTools
Finalmente será necessário definir as condições iniciais das variáveis presentes no exemplo, como se pode ver na fig. 21. O RTCTools é um programa executado através da linha de comandos do windows (cmd.exe). Sendo uma das formas de execução do programa a criação de um ficheiro do tipo batch, que para o nosso caso é o run-x86_64-windows-vc-10.0_release.bat, onde terá de estar descrita a localização do executável do programa (RTCTools.exe). Executado o programa resta, analisar resultados.
Figura 21: Ficheiro state_import.xml, condições iniciais
3.5. Resultados
Na figura 22, são demonstrados a partir de um gráfico combinado, o desenvolvimento das diferentes variáveis utilizadas, sendo que no Anexo 1, serão individualmente apresentadas cada uma destas variáveis, de maneira a facilitar a sua compreensão.
0 5 10 15 20 25 31 -12 -99 2 3: 45 1-00 0:0 0 1-00 0:1 4 1-00 0:2 8 1-00 0:4 3 1-00 0: 5 7 1-00 1:1 2 1-00 1:2 6 1-00 1: 4 0 1-00 1:5 5
QH_opt
Figura 23: Caudal turbinado ótimo
Figura 24: Variação da cota de superfície livre Figura 22: Caudal afluente à barragem
0 20 40 60 80 31 -12 -19 99 23: 45 01 -01 -20 00 00: 00 01 -01 -20 00 00: 14 01 -01 -20 00 00: 28 01 -01 -20 00 00: 43 01 -01 -20 00 00: 57 01 -01 -20 00 01: 12 01 -01 -20 00 01: 26 01 -01 -20 00 01: 40 01 -01 -20 00 01: 55
I_obs
-0,3 -0,2 -0,1 0 0,1 0,2 0,3 0,4 31 -12 -19 99 23: 45 01 -01 -20 00 00: 00 01 -01 -20 00 00: 14 01 -01 -20 00 00: 28 01 -01 -20 00 00: 43 01 -01 -20 00 00: 57 01 -01 -20 00 01: 12 01 -01 -20 00 01: 26 01 -01 -20 00 01: 40 01 -01 -20 00 01: 55H_sim
0 10000 20000 30000 40000 50000 60000 70000 80000 90000 31 -12 -19 99 23: 45 01 -01 -20 00 00: 00 01 -01 -20 00 00: 14 01 -01 -20 00 00: 28 01 -01 -20 00 00: 43 01 -01 -20 00 00: 57 01 -01 -20 00 01: 12 01 -01 -20 00 01: 26 01 -01 -20 00 01: 40 01 -01 -20 00 01: 55
Figura 25: Variação da capacidade de armazenamento da barragem
Figura 26: Caudal descarregado pelo descarregador de superfície
Dos resultados obtidos verifica-se:
Dois períodos onde se registaram caudal afluente à barragem, no período analisado. O primeiro, com um caudal afluente maior, no entanto, de menor duração e outro com caudal afluente menor mas cuja duração se prolongou por mais tempo.
Um aumento da quantidade de água armazenada coincidente com os períodos de caudal afluente; 0 5 10 15 20 25 30 31 -12 -19 99 23: 45 01 -01 -20 00 00: 00 01 -01 -20 00 00: 14 01 -01 -20 00 00: 28 01 -01 -20 00 00: 43 01 -01 -20 00 00: 57 01 -01 -20 00 01: 12 01 -01 -20 00 01: 26 01 -01 -20 00 01: 40 01 -01 -20 00 01: 55
QS_sim
O período com maior caudal descarregado, através do descarregador de superfície, não coincide com o período onde se registou o maior caudal afluente;
Maior quantidade de caudal turbinado nos períodos onde se registaram caudais afluentes;
Não foi ultrapassado o limite máximo de capacidade de armazenamento da barragem exemplo;
4. CASO DE ESTUDO
4.1. Bacia Hidrográfica do Rio Lima
Para caso de estudo selecionou-se a barragem do Lindoso, para aplicação de um controlador MPC, situada na bacia hidrográfica do rio Lima.
O Rio Lima nasce em Espanha, no monte Talariño, a cerca de 975 metros de altitude, depois de percorrer 41 km entra em Portugal, próximo do Lindoso e passa por Ponte da Barca e Ponte de Lima, até desaguar no oceano Atlântico em Viana do Castelo, após percorrer 135 km. A bacia hidrográfica do rio Lima (figura 25) tem uma superfície de 2518 km2, dos quais cerca de metadeem Portugal. A altitude da bacia do rio Lima varia entre os 0 e os 1516 metros (na serra do Larouco). O escoamento anual na foz do rio é, em média, de 3298 hm3 estimando-se que, em território nacional, tenha uma capacidade total de armazenamento de recursos hídricos na ordem dos 400 hm3, em regime regularizado.
Figura 27: Bacia Hidrográfica Rio Lima
4.2. Barragem do Alto Lindoso
A barragem do Alto Lindoso situada no rio Lima a escassas centenas de metros da fronteira com Espanha, é uma barragem em abóboda. É atualmente o mais potente centro produtor hidroelétrico instalado em Portugal. Cerca de 17 km a jusante desta encontra-se o