SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: 22.04.2003
Assinatura:
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
,sly>a,~Po<
An á lis e e im p le m e n t a çã o d e a lgo r it m o s p a r a
lo ca liza çã o d e r ob ôs m óveis
Le a n d r o Ca r lo s Fe r n a n d e s
Or i e n t a d o r a : P r o fa . D r a . R o s e li A p a r e c id a Fr a n c e lin R o m e r o
Dissertação apresentada ao Instituto de Ciências Matemáticas e de Computação - ICMC-USP, como parte dos requisitos para obtenção do título de Mestre em Ciências de Computação e Matemática Computacional.
A Comissão Julgadora:
Profa. Dra. Roseli Aparecida Francelin Romero
Prof. Dr. Eduardo Marques
"Ifk n o iv le d g e c a n c r e a t e p r o b le m s ,
it is n o t t h r o u g h ig n o r a n c e t h a t w e c a n s o lv e t h e m ."
Agr adeci ment os
Sinto ser ap enas umas, as p ág inas d ed icad as ao s ag rad ecim ento s, p o is seria necessário
m uito mais p áginas d o que as utilizad as no trabalho , para que p ud esse relacio nar os no mes d e
to d o s a q uem eu p resto meus ag rad ecim ento s. Embo ra, d ed ico as linhas restantes, àqueles que
certam ente tem seus no mes encab eçand o esta lista.
Po r um a questão de p rimaz ia na m inha vid a, meu p rimeiro ag rad ecim ento é a Deus que
sem p re m e amp aro u em suas mão s e co briu-me co m suas asas, não d eixand o que meus p és
v acilassem . Em seguid a, ag rad eço a u m d e seus anjo s que habitam a terra, a minha mãe, que
m esm o sem co nhecer d o p ro fund o d a ciência d o s ho mens, fielmente estev e co mig o m esm o
q uand o d istante e crio u um ho m em a q u em muito s resp eitam e ad m iram .
A o m eu Pai, que me ensino u a não transgred ir as co isas em que acred ito o u abrir m ão d o s
m eus v alo res po r qualquer que seja o p reço a ser p ago , mas ser c ap az d e and ar pela vid a d e
cabeça erg uid a e encarar o s o utro s o lho s no s o lho s.
A Pro fa. Dra. Ro seli, uma p esso a q ue ind ubitav elmente m e auxilio u no s m o m ento s mais
crítico s d o m eu trabalho , e que d urante to d o este temp o semp re teve p ara co m ig o co mp reensão
e d ed icação .
A o Pro f. Dr. Ed uard o M arques, que ap esar de não ter sid o m eu o rientad o r, o u aind a, co
-o rientad -o r, semp re d esem p enh-o u esse p ap el, além d e -o ferecer seus p réstim -o s e recurs-o s d -o
LC R p ara que eu p ud esse d esenv o lv er e co ncluir m eu trabalho .
Im ed iatam ente ap ó s, v em to d o s d a m inha família, o v ô Li, a v ó Cid a, q ue cad a um em u m a
ram o , fo ram o s que d eram início a isso tud o (família), as tias Cid a, Dulce, Dirce, Ed na, Jo ana,
M árcia e Ro sa, o s tios, Ismael, Jo ão , N enê e Serginho , to d as as m inhas p rimas, Caro l, Cíntia,
M ary , Erika, Marina Ciça, o s m eus p rim o s Jo rg e, Diego e Vito r, a m inha m ad rasta Co nceição , ao
seu p ai Paulo e sua mãe Maria, ao irm ão Paulinho e sua so brinha Daniela, que, p arte em São
Paulo e p arte em Ribeirão , sem p re fiz eram a maio r to rcid a pelo m eu sucesso .
A o Jean, ao Henrique, a Viv i e ao César (SP), p esso as que realm ente fazem jus à
classificação d e amigo s, e tam bém , ao s m eu s co o rd enad o res e ao s co leg as d e trabalho na UN IP,
c o m o a Fabrícia, a Neli, as Danis, Betão e o Fernand o .
co leg as d o LA B1C, C lau d ia, G u stav o , Ro d rig o , D éb o ra, G ed so n e o s o utro s.
Um ag rad ec im ento em esp ecial a Pro fa. Dra. Maria d as G raç as V o lp e N u nes, alg u ém a
q u em nunca me rep o rtei d iretam ente, m as ind iretam ente reso lv eu g rand es p ro b lem as para
m im , c o m o p o r exem p lo , a p ro rro g aç ão d o p raz o , q ue já hav ia sid o estend id o , em m ais cinco
d ias p ara que este trabalho p u d esse ser co ncluíd o .
A s m eninas q ue trabalham na secretaria d e p ó s- g rad u aç ão , Beth, Laura e A na, e tam b ém a
uma ex-funcio nária d esse d ep artam ento , a M arília, q ue sem p re fo ram m uito p restativ as e
atencio sas c o no sc o (aluno s).
N ão p o d eria d eixar d e ag rad ec er ao g u ard as A lex, M arco , V ag ner e o N u nes, q ue p o r
m uitas v ez es fo ram às únicas c o m p anhias q ue eu tinha na IJSP e q ue, nas lo ng as no ites,
Sumár i o
Lista de Figuras iv
índ ice de Siglas vii
Resumo viii
A bstract ix
Capítulo 1 - Intro d ução 1
1.1. O q u e são R o b ô s ? 1
1.1.1.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Robôs Móveis 41.2. Inc ertez a n a Ro b ó ti c a 5
1.3. Re p re s e n tan d o o m u n d o 7
1.3.1. Diagramas de estado 8
1.3.2. Mapeamento 10
1.4. A inte raç ão e ntre o ro b ô e o am b i e n te 11
1.5. N av e g aç ão 13
1.6. Lo c al i z aç ão 14
Capítulo 2 - Lo calização de Ro bô s Móveis 16
2.1. Po s i c i o n am e n to Re l ati v o 16
2.2. Po s i c i o n am e n to A b s o l u to 17
2.3. A ju ste d e Po si ç ão u s a n d o O d o m e tri a 18
2.4. Po s i c i o n am e n to Bas e ad o e m M a p a s 22
2.5. L a n d m a r k s 23
2.6. Trab al h o s R e l ac i o n ad o s 27
2.6.2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Utilizando Landmarks 30 2.6.3. Utilizando Landmarks e Odometria 31Capítulo 3 - Embasamento teórico 33
3.1. Pro je to Fl ak e y & o sistem a Sap h i ra 33
3.1.1. O projeto Flakey 34
3.2. O si ste m a d e c o ntro le ro b ó tic o - Sap h i ra 35
3.2.1. Arquitetura do Sistema 37
3.2.1.1. Micro-tarefas do SO 37
3.2.2.2. Rotinas do Usuário 38
3.2.1.3. Comunicação de Pacotes 39
3.2.1.4. Refletor de Estados 39
3.2.2. A arquitetura de controle do robô 40
3.2.2.1. Representação do Espaço 40
3.2.2.2. Controle de Direção e Movimento 42
3.2.2.3. Rotinas para Interpretação dos Sensores 42
3.3. O ro b ô Pi o n e e r 1 43
3.4. O s o n ar Po l aro i d 6500 44
3.5. Filtro d e K a l m a n 49
3.5.1. Funcionamento do Filtro de Kalman 50
3.5.2. Filtro de Kalman em Modelos Estocásticos 56
3.6. Re d e s N e u rai s A rtif ic iais 58
3.6.1. Mapas Auto-Organizáveis (Self-Organizing Maps) 59
Capítulo 4 - Um sistema para Lo calização 63
4.1. V i s ão g e ral d o Si ste m a 63
4.2. Si s te m a d e N av e g aç ão 64
4.3. Fi l trag e m d o s d ad o s d o s so n are s 67
4.3.2. Utilizando Filtro Kalman 69
4.3.3. Ajustando os parâmetros do Filtro 71
4.4. Lo caliz ação 72
4.4.1. Sistema de Orientação 72
4.4.2. Odometria 75
4.4.3. A Rede de Kohonen 76
Capítulo 5 - Discussão dos resultados 80
5.1. Utiliz and o O d o m e tria 80
5.2. Utiliz and o Lan d m arks 84
5.3. Utiliz and o ju nto s O d o m etria e Land m arks 86
5.4. Trab alho s f u tu ro s 87
Referências bibliográficas 88
A pêndice A 91
A pêndice B 92
List a de Figuras
Fig ura 1.1 - Ro bô s Ind ustriais
zvtsrponmligedcbaPA
3Fig ura 1.2 - Ro bô s M ó v eis 4
Fig ura 1.3 - Diag rama d e Estad o s 9
Fig ura 1.4 - Interação Ro bô / A mbiente 11
Fig ura 1.5 - A co erência d o M o d elo d e M u nd o 12
Figura 2.1 - Disp o sitiv o s utilizad o s p ara nav eg ação inercial 17
Figura 2.2 - Esq uem a d e um co d ificad o r ó p tico relativ o 19
Figura 2.3 - Esq uem a de um co d ificad o r ó p tico abso luto 19
Fig ura 2.4 - A m biente : Sala 4x4 21
Fig ura 2.5 - Ro bô nav eg and o na sala 21
Fig ura 2.6 - Estabelecend o a co rresp o nd ência entre o M ap a Lo cal e o Glo bal p ara um sistema
q ue em p reg a o p arad ig ma métrico 22
Fig ura 2.7 - Exem p lo d e Land m arks A rtificiais p ara sistemas basead o s em v isão 25
Fig ura 2.8 - Exem p lo d e Land m arks N aturais p ara o sistema FIN A LE b asead o em v isão 25
Fig ura 2.9 - Esq uem a geral p ara reco nhecim ento d e Land marks 26
Fig ura 3.1 - Flakey : ro bô d esenv o lv id o p elo SRI Internatio nal 34
Fig ura 3.2 - A rquitetura do sistema Sap hira 37
Fig ura 3.3 - A rquitetura d e co ntro le 40
Fig ura 3.4 - Rep resentação d o esp aço ao red o r d o ro bô no sistema Sap hira 41
Fig ura 3.5 - O ro bô Pio neer 1, equip ad o c o m u m a câmera de v íd eo 43
Fig ura 3.6 - Po laro id Série 6500 45
Fig ura 3.7 - D esenho esquemático d e um transd uto r eletro stático 45
Fig ura 3.9 - Gráfico d a amp litud e m áxim a à 50kH z
zvtsrponmligedcbaPA
4 7Fig ura 3.10 - Co ne d e p ro p ag ação do sinal d e ultra-so m 49
Fig ura 3.11 - D ensid ad e co nd icio nal da p o sição basead a no v alo r z, 51
Figura 3.12 - D ensid ad e co nd icio nal da p o sição basead a ap enas no v alo r z2 51
Fig ura 3.13 - D ensid ad e co nd icio nal da p o sição basead a no s valo res z , e z2 52
Figura 3.14 - Pro p ag ação d a d ensid ad e co nd icio nal 54
Figura 3.15 - A lg o ritm o d o Filtro d e Kalman 58
Fig ura 3.16 - M o d elo estrutural d e um M ap a A uto -O rg aniz áv el 60
Figura 3.17 - D eterm inação da v izinhança d o neurô nio v enced o r 61
Fig ura 3.18 - A tualiz ação d e p eso s d urante a ap resentação d e d uas entrad as co nsecutiv as 61
Fig ura 4.1 - A m biente d o A LD ER 65
Fig ura 4.2 - A Janela Virtual 66
Fig ura 4.3 - Co rred o r d o Blo co 1 do ICM C 67
Fig ura 4.4 - Im p lem entação d o Filtro d e Kalm an 69
Figura 4.5 - Gráfico : Leituras d o so nar x Saíd a d o filtro 70
Fig ura 4.7 - Co nv ersão d e co o rd enad as entre d o is sistemas d e o rientação 73
Fig ura 4.8 - Sistemas Cartesiano s de O rientação Lo cal e Glo bal 74
Fig ura 4.9 - Relação entre a d etecção senso rial e LPS 75
Fig ura 4.10 - O d o m etria 76
77 Fig ura 4.11 - Definição da classe que rep resenta o s neuró nio s.
78
Fig ura 4.12 - Definição d a classe que mo d ela a Red e d e Ko ho nen..
Fig ura 4.13 - A tualiz ação d a v izinhança, seg und o cad a u m d o s alg o ritmo s 78
Fig ura 5.1 - D eslo cam ento real v s Deslo camento m ed id o 81
82
Fig ura 5.2 - Saíd a g erad a p elo sistema o d o métrico (4 to m ad as co nsecutiv as).
Figura 5.4 - Estimativa o do métrica d urante um mano bra de ré.
índi ce de Si gl as
A RT2: A d ap tativ e Reso nace Teo ry
FRC: Field Ro bo tics Center
G M S: Glo bal M ap Sp ace
GPS: Glo bal Po sitio n Sy stem
LA BIC: Labo rató rio d e Inteligência Co mp utacio nal
LPS: Lo cal Percep tual Sp ace
M EF: M áq uina d e estad o s finito s
N REC : N atio nal Ro bo tics Eng eneering Co nso rtium
RCE: Red uced Co ulo m b Energ y
RIA : Ro bo tics Ind ustries A sso ciatio n
RN A : Red e N eural A rtificial
RVL: Ro bo t Visio n Labo rato ry at Purd ue Univ ersity
SO : Sistema O p eracio nal
SO FM : Self-O rg aniz e M ap s
SO N A R: So und N av ig atio n and Rang ing
TCP/ IP: Transfer Co ntro l Pro to co l / Internet Pro to co l
TO F: Tim e o f flight
Resumo
A cap acid ad e mais impo rtante de um sistema d e nav egação para um ro bô mó vel, além d e
manter-se o p eracio nal e evitar co lisõ es, é a que estabelece a sua p ró p ria p o sição em relação ao
ambiente. A esta cap acid ad e dá-se o no me d e
zwvutsrqponmlkjihgfedcbaVRPNLIFDCA
lo c a liz a ç ã o , que co nsiste em atualizar a po siçãodo ro bô no ambiente, tendo co mo base, as leituras pro venientes dos senso res.
Talv ez o fato mais impo rtante o btid o a partir do vasto co njunto d e p esquisas so bre o tema
lo calização d e ro bô s mó veis, seja que, até ho je, apesar de existirem muitas aplicaçõ es bem
suced id as, aind a busca-se uma so lução elegante e ro busta para o p ro blema d e lo calização .
A s técnicas existentes para lo calização d e ro bô s mó veis p o d em ser classificad as no s
seguintes grup o s: técnicas basead as em p o sicio namento relativo e as que se baseiam em
p o sicio namento abso luto . Dentre as p ertencentes ao primeiro grup o , d estacam-se os méto d o s
d e lo calização o d o métrico s e aos p ertencentes ao segund o , os basead o s em
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
landmarks.Este trabalho investiga o po tencial d e alguns algo ritmo s que imp lementam méto d o s
o d o métrico s e méto d o s basead o s em landmarks, v isand o uma imp lementação híbrid a d o s
mesmo s. O d esemp enho do s méto d o s imp lementad o s foi avaliad o no simulad o r Sap hira e no
ro bô mó v el Pio neer 1, existente no Labo rató rio de Inteligência Co mp utacio nal (LA BIC), através
Abst r act
The m o st im p o rtant attribute in a nav ig atio n ro bo t system, bey o nd to keep the ro bo t alive
and o p erating , is the elem ent that establishes the self lo catio n in relatio n to env iro nment. This
feature is called
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
localization, w hich means to establish the ro bo t's p o sitio n (lo catio n) into the env iro nm ent just based o n the senso r read ing s.It m ay be, the m o st imp o rtant results to fo und w ith a lot o f research abo ut the theme
mo bile ro bo ts lo calizatio n is that, until no w , ev en tho ug ht w e had v ery m u c h successful
ap p licatio ns, any so lutio n w as skill and ro bust eno u g h to so lve this p ro blem.
The m o bile ro bo t lo calizatio n alg o rithms can be classified into tw o g ro up s: Absolute
Location and Relative Localization. In this w o rk, the po tential o f so me o d o m etric (relative
lo calizatio n) and land m ark based (abso lute lo calizatio n) algo rithms lo o king fo r a hy brid
sy stem, is inv estig ated . The system p erfo rm ance w as tested at Sap hira Sim ulato r and Pio neer 1
Capít ul o 1 - Int r odução
literatura p ro p o rcio na um esp aço o nd e a mente tem to tal liberd ad e d e criação ,
m esm o q ue as p ro p o stas ap resentad as sejam, em sua ép o ca, fisicamente
imp o ssív eis o u imp raticáv eis. O bras classificad as co m o ficção científica
co nstantemente m o stram máquinas antro p o mó rficas e auto -suficientes, d o tad as d e
características intelig entes e cap azes de ap resentar u m a d esenv o ltura p arecid a à d o s seres
hum ano s nas áreas m ais características da natureza hu m ana.
Po r muito tem p o u m a d as v isõ es mais exp lo rad as p ela literatura e p elo s filmes, foi aquela
que p ro jetav a o s ro bô s c o m o substituto s d o ser hu m ano , máquinas sup erio res a nó s em
p raticamente to d o s o s asp ecto s, e muitas v ezes, até p o r serem d esp ro v id as d e sentimento s,
to rnav am-se insurretas ao s seus criad o res, p ro p o rcio nand o futuro s incerto s p ara to d a a raça
hum ana.
A p esar d isto tud o , no ssa realid ad e se mo stra b em d iferente d o que tais d escriçõ es. N a
v erd ad e, atualmente há inúm eras v ertentes que a cad a d esco berta tecno ló gica o u bio ló g ica,
ev id encia mais e mais u m cam inho exatamente o p o sto a essa v isão ap o calíp tica, p rincip alm ente
p o r questio nar o s limites entre a criação d e u m a m áq uina co m habilid ad es hu m anas e as
características que no s to rnam p ro p riamente hum ano s.
1. 1. 0 que são Robôs?
A mo tiv ação hu m ana p ara a co nstrução d e ro bô s está lo nge d o d esejo d e criar m áq uinas
que v isam substituir a existência humana, o u aind a, o d e co ncretizar o d esejo d o s ho m ens d e ser
um Deus, atrav és d a criação d e um a no v a existência.
O termo " Ro b ô " fo i intro d uz id o em 1921 p o r u m a d as p esso as mais p ro em inentes d a
literatura tcheca, o ro m ancista Karel Cap ek, atrav és d e seu livro "R.U.R. - Ro ssum's Univ ersal
Ro b o ts" [CA PEK,21],
hu m ano s, cujo p ap el era to rnar a v id a d as p esso as mais ag rad áv el, p o is esta m áquina realizav a
to d o o tip o d e trabalho que nó s hu m ano s não g o stamo s d e fazer.
Tal id éia teria um imp acto extrao rd inário na co munid ad e hu m ana. C o m um mínimo d e
co nhecim ento a resp eito d e si p ró p rio , qualquer p esso a é cap az d e c o m p reend er quão o p o rtuna
seria a co ncretiz ação d e tal so nho . Em p rimeira instância, alguns p o d eriam d izer que isso tud o
seria, no m ínim o , uma situação c ó m o d a e d ig na d e um rei. M as e se p o r v entura o usarmo s
p ermitir que no ssa mente d iv ag ue liv rem ente? Certamente d esco briríamo s inúm eras ap licaçõ es,
nas mais d iv ersificad as áreas e subsid iad as p elo s mais d iferentes mo tiv o s.
Po d em o s imag inar esses d isp o sitiv o s inteligentes o p erand o em lug ares extrem am ente
inó sp ito s ao seres hum ano s, co m o na rem o ç ão de minas terrestres, reg aste em ambientes
sujeito s a d esm o ro nam ento , na exp lo ração d e p lanetas d esco nhecid o s o u co m batend o
v az am ento s em usinas nucleares, ao inv és d e, simp lesmente, arriscarmo s p esso as p ara a
realiz ação d estes trabalho s.
Entretanto o utras ap licaçõ es p o d eriam surgir que não sejam, necessariamente,
d eterm inad as pela v alo rização da v id a, m as p ela melho ria d e sua qualid ad e. Tem as que v isam
o co nfo rto e bem estar d o ser hum ano , c o m o p o r exemp lo , o de realizar tarefas ted io sas c o m o
lav ar lo uças e aspirar carp ete, bem co m o , ser cap azes d e guiar um carro d e fo rma segura,
p erm itind o que o p assageiro d escanse o u tenha temp o p ara realizar tarefas mais imp o rtantes.
M o tiv açõ es co m o essas, que p o r ano s imp eliram o s escrito res a criar m áq uinas co m tais
características em suas o bras, ag o ra im p ulsio nav a os estud io so s a um no v o c am p o de p esquisa
d entro d a ciência da co m p utação e d a eng enharia, ho je co nhecid a c o m o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Robótica, cujo o bjeto d e estud o são d isp o sitiv o s que p ercebem e m anip ulam o m und o físico .A p alav ra e o co nceito to rnaram-se m ais p o p ulares cerca d e trinta ano s d ep o is, co m o s
liv ro s d o escrito r Isaac A simo v , que na d écad a d e cinquenta, enuncio u as leis fund amentais d a
ro bó tica em sua o bra "I, Ro b o t" [A SIM O V ,94], A s três leis eram:
I
aLe i:
Um robô não pode machucar ou ferir um ser humano, ou, por falta
de atitude, permitir que um ser humano venha a se ferir.
2
aLe i
: Um robô deve obedecer às ordens dadas por um ser humano, exceto
quando essas ordens entrarem em conflito com a primeira lei.
Tam anha era a genialid ad e d e A simo v que, m esm o ele tend o enunciad o estas três leis em
um p erío d o muito antes d a sed imentação da ro bó tica co m o ciência, p raticamente nad a se
altero u nelas, exceto p ela inserção da lei zero , que estend e a abrang ência d as leis, m ud and o o
fo co d o ind iv íd uo p ara a to d a a hum anid ad e.
Desd e então , a d efinição p ara o termo ro bô so freu inúmeras alteraçõ es aco m p anhand o as
ino v açõ es e d esco bertas p ro p o rcio nad as pela Ro bó tica. De aco rd o co m a Ro bo tic Ind ustries
A sso ciatio n (RIA ) ap ud A rkin [A RKIN ,99], um ro bô é: um m anip ulad o r multifuncio nal,
re-p ro g ramáv el, re-p ro jetad o re-p ara mo v er: materiais, re-p artes, ferramentas o u d isre-p o sitiv o s
esp ecializad o s, atrav és de d iferentes m o v im ento s p ro g ram ad o s d e fo rma a realizar v árias
tarefas.
O s p rimeiro s ro bô s a g anharem esp aço em meio à hum anid ad e certamente fo ram o s
ind ustriais (Figura 1.1). M o tiv ad o s p ela d esv alo rização d o ser hu m ano em suas características
mais elementares, bem co mo , d ad o o caráter rep etitiv o e d e p o uco o u nenhum esfo rço
intelectual d o trabalho nas linhas d e p ro d ução ind ustriais, v isualizav a-se ali um ambiente que
d esqualificav a o ser hu m ano p ara exercício da tarefa e, ao m esm o temp o , ap resentav a
características que iam d e enco ntro co m as exp ectativ as que fund am entaram a ro bó tica.
Figura 1.1 - Robôs Industriais
A p esar d a infinid ad e d e ap licaçõ es p o ssív eis p ara o s ro bô s, até esse m o m ento da histó ria, a
d e m o ntag em , d esem p enhand o u m a tarefa id êntica to d o s o s d ias.
A p ó s este p erío d o d e um a no v a "rev o lução ind ustrial", as ap licaçõ es d o s sistemas ro bó tico s
têm ev o luíd o p ara d o mínio s d iferentes e mais co mp lexo s. Co nsequentem ente, a fim de se
v iabilizar qualquer estud o , é p ertinente que se realize alg um tipo d e ag rup am ento baseand o -se
em d eterminad o s critério s, o u melho r, criar d iferenciação seg und o u m a classificação .
Deste mo d o , um ro bô p o d e ser classificad o p artind o -se d e d iferentes p o nto s d e vista, co mo :
quanto à sua fo rma física, característica d e ação , tipo d e d eslo camento , materiais d o quais é
co nstituíd o , tip o d o s senso res, tipo d o s atuad o res, sistema d e lo co mo ção , sistemas
co mp utacio nais, o u aind a, não se atend o a estrutura física p o d em o s classificá-lo s quanto ao seu
co m p o rtam ento e sistemas d e co ntro le [A RKIN ,99],
1. 1. 1. Robôs Móvei s
Um a d estas p o ssív eis classes d e ro bô s são o s cham ad o s
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
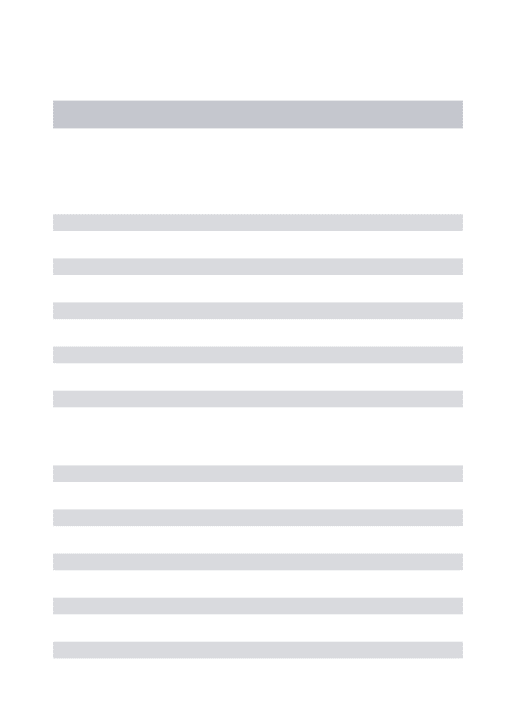
Robôs Móveis, cuja característica fund amental é a cap acid ad e d e d eslo carem a si mesmo s.(b) (c) (e)
(a) o robô Pioneerl, comercializado pela iRobot, utilizado neste projeto. (b) Primeira versão do AIBO, desenvolvida e comercializada pela Sony. (c) Humanóide ASIMO, desenvolvido pela japonesa Honda. Na coluna da direita, os robôs apresentados na Robodex 2002, onde (d) é um modelo fabricado pela Sony que recebe comando de voz e tem forma esférica para evitar obstáculos, e (e) é um robô de vigilância com formato de cão-de-guarda, que vem equipado com câmera de vídeo fabricado pela Sanyo.
Figura 1.2 - Robôs Móveis
p arecid o s co m p ernas, estes ro bô s são cap az es de lo co mo v er-se em um ambiente ev itand o
co lisõ es c o m o utro s elemento s inserid o s no m esm o ambiente (Figura 1.2).
D entro d e to d a esta g am a que c o m p õ em o s ro bô s mó v eis, aind a estam o s interessad o s em
u m a subclasse fo rmad a p elo s ro bô s mó v eis autó no m o s e co m alg um co m p o rtam ento
inteligente.
Existem inúmeras d efiniçõ es p ara ro bô s mó v eis inteligentes. De aco rd o co m A rkin
[A RKIN ,99], um ro bô mó v el inteligente é u m a máquina cap az d e extrair info rmaçõ es a partir d o
am biente e usar este seu co nhecim ento so bre o m und o p ara m o v er-se de fo rma seg ura e
significante.
Um a o utra d efinição foi p ro p o sta p o r Ribeiro et al [RIBEIRO ,01], o nd e d escrev e o s ro bô s
m ó v eis c o m o send o ag entes artificiais ativ o s, co m cap acid ad e d e lo co m o ção , imerso s em um
m u nd o físico real.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Artificiais, p o r não faz erem parte da naturez a; ativos, p o r atuarem no am biente d e fo rma racio nal e não p assiv a; e com capacidade de locomoção p o r p o d erem selo co m o v er p elo d o mínio . A o lo ng o d o texto que se segue, sem p re que m encio nad a a p alav ra
ro bô mó v el, ela d ev erá ter o sig nificad o seg und o as d efiniçõ es d e ro bô s mó v eis inteligentes
d ad as acima.
1. 2. Incert eza na Robót ica
Em m und o s reais, p eculiares p o r suas co nstantes m ud anças, c o m o p esso as e carro s
transitand o , o bjeto s o cup and o d iferentes lugares, e to d a a so rte d e d inâm ica característica d este
am biente em que v iv emo s, o s atributo s necessário s p ara que um ro bô seja cap az d e o p erar
m u d am d rasticamente se c o m p arad o s ao s d o mínio s ap resentad o s anterio rmente, co mo era o
que se p o d eria d izer em relação ao s estruturad o s e o rg aniz ad o s ambientes d as linhas d e
p ro d ução , o nd e uma d eterminad a p eça necessária à so ld ag em p o d ia ser enco ntrad a semp re no
m esm o lug ar e na m esm a p o sição .
Deste mo d o , talvez o atributo mais imp o rtante que um ro bô m ó v el d ev a ter é a cap acid ad e
d e o p erar em d o mínio s que são , em sua natureza, imp rev isív eis e d e crescente d esestruturação .
A esta imp recisão e d úv id a causad as p o r m ud anças inesp erad as e inco ntro láv eis que aco ntecem
no am biente d amo s o no m e d e incerteza [THRUN ,98],
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Nativas do ambiente - o m und o físico é p o r sua p ró p ria naturez a imp rev isív el, d esd e que são inúm eras as variáveis inco ntro láv eis que estão p resentes e ativ as no d o mínio .Para am bientes bem estruturad o s o grau d e incerteza é p equeno , entretanto p ara
am bientes c o m o casas, esco las e estrad as, que são extrem am ente d inâmico s, o grau d e
incerteza cresce v ertigino samente.
o Nas leituras dos sensores - os d isp o sitiv o s emp reg ad o s p ara aferir g rand ez as do
d o m ínio d a ap licação p o ssuem suas p ró p rias limitaçõ es, o u seja, o s seus alcances e
reso luçõ es o bed ecem às leis da física, p o r exemp lo , câmeras não p o d em cap tar
im ag ens atrav és d e p ared es, e aind a, a reso lução da im ag em tem seus limitantes.
O utro asp ecto imp o rtante resid e no fato d e que os senso res estão sujeito s a ruíd o s
(p erturbaçõ es externas) imp rev isív eis, resp o nsáv eis po r p erturbaçõ es no s valo res de
suas m ed id as, fato este, bem co stum eiro ao s que utilizam so nares c o m o senso res,
um a v ez que este tipo de senso r é extrem am ente suscetível a ruíd o s.
o Inerentes aos dispositivos do robô - d isp o sitiv o s que co m p õ em o ro bô p o d em ter seu
c o m p o rtam ento alterad o co m o d eco rrer d o temp o , isto é, m esm o que co nstruíd o s
co m extrem a p recisão , m ecanism o s m ecânico s co mo eng renag ens e mo to res p o d em
ac um ular sujeira ou so frer d esg astes d urante o p erío d o d e seu uso , p ro v o cand o
d iferenças na sua v elo cid ad e d e ro tação o u p o sicio namento .
o Nos modelos de mundo - Mo d elo s são imp reciso s p elo p ró p rio fato d e serem abstraçõ es
d o m u nd o real. É extremamente d ifícil o bter um mo d elo co m p leto o suficiente p ara
rep resentar to d as as relaçõ es p resentes em um ambiente, e, aind a se isto fo sse
p o ssív el, o utro d eterminante seria a co mp lexid ad e d e sua co nstrução ,
arm az enam ento e manutenção . Lo g o , to d o s os mo d elo s são em sua essência
simp lificaçõ es d o m und o real cap az es d e p reserv ar características que sejam
relev antes à ap licação .
o
Característica ao processo computacional- os sistemas computacionais possuem
limitaçõ es e, muitas v ezes, o s p ro cesso s físico s d ev em ser ad ap tad o s d e maneira que
sua im p lem entação co mp utacio nal o bed eça a essas limitaçõ es, isto é, tais ad ap taçõ es
muitas v ez es são o btid as atrav és d a utilização d e méto d o s d e ap ro xim ação , o que
p enaliz a to d o o sistema co m um erro intrínseco a p ró p ria ap ro ximação .
A nterio rm ente a questão da incerteza era p raticamente igno rad a p ela ro bó tica, m as co m a
m ais d esestruturad o s e d inâmico s, essa questão tem se to rnad o um elemento d ecisiv o p ara o
sucesso d e qualquer ap licação neste tipo d e d o mínio .
1. 3. Repr esent ando o mundo
Típ ico s na literatura d e ro bô s mó v eis, o s termo s
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
mundo, ambiente e meio d eno tam o co njunto co m p reend id o p o r: [W EBSTER]i. A área em que alguma coisa vive ou existe; ou
ii. A totalidade das coisas que cercam ou estão ao redor; ou ainda
iii. As condições, influências e forças que interferem ou modificam os
elementos contidos nele.
A lg um as p ro p ried ad es d o ambiente co m o co nd içõ es, influências e fo rças esp ecificam
g rand ez as e p o d em ser quantificad as, serv ind o -no s, em muito s caso s, co m o sinalizad o res d e
que o m eio so freu alteraçõ es. O estado de um ambiente p o d e ser d efinid o co m o um co njunto d e
to d as as g rand ezas m ensuráv eis quantificad as d o ambiente em um instante d e tem p o
d eterm inad o [THRUN ,00].
O bv iam ente, q uand o estes co nceito s são ap licad o s em sistemas co mp utacio nais, alg um as
d essas g rand ez as são irrelev antes em relação à ap licação e, p o rtanto , p o d em ser d esp rez ad as
sem p enalid ad es, d e maneira a ad equar o fo co da análise d o s estad o s d o ambiente tão so m ente
àquelas características que exp ressem alg uma co ntribuição p ara no rteam ento da execução d a
ap licação .
Po r mo tiv o s d e simp lificação , no s referimo s a to d as essas d iferentes entid ad es q ue
c o m p õ em um ambiente c o m o send o , cad a um a d elas, um a propriedade ou característica
d istinta d este ambiente, ind ep end entem ente do seu tipo o u grau d e co ntribuição .
O estad o d e um am biente é unicamente caracterizad o , o u seja, não existem d o is estad o s
d iferentes que sejam ig ualm ente quantificad o s - co m co nfig uraçõ es iguais - p ara um m e sm o
am biente.
Similar a uma fo to grafia, um estad o representa as entid ad es, d isp o siçõ es, co nd içõ es, e
to d o s o s o utro s elemento s p ertencentes ao meio (p ro p ried ad es o u características d o ambiente),
A ssim send o , qualquer alteração nas características d o ambiente, m esm o que isso o co rra em tão
so mente u m a d elas, imp licaria em uma m u d anç a p ara um no v o e d iferente estad o .
De aco rd o co m esses fato res d e alteração , o u melho r, seg und o o s elem ento s que incitam as
transiçõ es entre o s d iv erso s estad o s, p o d em o s d iferenciar o s ambientes em d uas catego rias: o s
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ambientes estáticos
e os
ambientes dinâmicos.
Ambientes estáticos são to do s aqueles que p erm anecerem inalterad o s até que seja realizad a
uma ação p o r p arte d o ro bô , o u seja, nenhu m o utro fato r altera o s relacio nam ento s e o bjeto s do
m u nd o (estad o ), a não ser o p ró p rio ro bô d urante sua interação co m o meio .
Entretanto , q uand o um ambiente so fre alteraçõ es mo tiv ad as p o r o utro s fato res que não
ap enas as açõ es d o ro bô , o u seja, m esm o no caso em que o ro bô não d esem p enhe nenhum a ação
o ambiente aind a p o d eria so frer uma m u d anç a d e estad o , então a esses d eno m ina-se ambientes
dinâmicos [BO REN STEIN et al,96].
Em se d esejand o que o ro bô interaja co m o m u nd o d e fo rma intelig ente e hábil to rna-se
necessário a ele co mp reend er, da m elho r m aneira po ssível, o m eio o nd e está inserid o . A
m o d elag em d o m u nd o é uma fase imp o rtante, po is esta etap a co nsiste na criação d e um
p ro tó tip o que reflita ao m áxim o a realid ad e d o ambiente, rep resentand o o co nhecim ento so b
uma fo rma que cap acite o ro bô à tarefa d e inferência e seja, aind a, co m p utacio nalm ente viável.
É, p o rtanto , neste mo d elo que o ro bô arm az ena to d o o co nhecim ento que p o ssui acerca d o
ambiente ao seu red o r.
A interferência hum ana nesta etap a p o d e co m p ro m eter co nsid erav elm ente o d esem p enho
glo bal, v isto que o s no sso s sistemas d e p ercep ção - v isão , aud ição , tato , o lfato e p alad ar - aind a
que p o r m uitas v ez es sejam p arecid o s c o m o s senso res utilizad o s na ro bó tica, não tem seus
"sinais" p ro cessad o s d a m esm a maneira.
A situação inv ersa também o co rre, não o bstante, ro bô s equip ad o s co m senso res d e alta
sensibilid ad e são cap az es d e cap tarem p eq uenas nuances do ambiente que são imp ercep tív eis
às p esso as. Co nsequentem ente, um m o d elo estabelecid o po r qualquer entid ad e, que não o
p ró p rio ro bô , inicialmente tend e a não ser ó timo .
1. 3. 1. Di agr amas de est ado
Um a d as abo rd ag ens utilizad as p ara a m o d elag em d e mund o s está fo rtem ente ap o iad a no
g rand ez as d o m u nd o em instantes d e tem p o .
Ind ep end entem ente d o tipo d e am biente que está send o m o d elad o (estático o u d inâmico ),
p o d em o s d escrev ê-lo atrav és d e um co njunto d e instâncias assum id as p o r cad a um a d e suas
p ro p ried ad es ao lo ng o d o temp o (estad o ), g arantind o semp re que u m estad o seja unicamente
d efinid o .
A ssim send o , to d a alteração so frid a p o r um ambiente será rep resentad a co mo uma
transição que p arte de um estad o e lev a p ara o utro . E imp o rtante lem brar que em se tratand o d e
um m o d elo criad o p ara rep resentar um am b iente d inâmico , as transiçõ es entre o s estad o s não
serão d eterm inad as tão so mente p elas açõ es realizad as pelo ro bô , m as tam b ém p o r fato res
externo s. Lo g o , tais influências p recisarão ser co nsid erad as p elo mo d elo .
Su p o nha um ambiente fechad o qualquer que co ntenha, d entre o utro s o bjeto s, um a fo nte d e
luz e um interrup to r cap az d e ligá-la e d esligá-la. Em no ssa m o d elag em , a única característica
relev ante d este ambiente será a fo nte d e luz, p o d end o então , serem d escartad as to d as as o utras
características d o ambiente.
Em um seg und o m o m ento , d efine-se as p o ssív eis co nfiguraçõ es (estad o s) q ue este ambiente
p o d e assum ir em relação à característica esco lhid a: estar co m a luz acesa (estad o A ) o u estar
co m a luz ap ag ad a (estad o B).
A ativ id ad e (ação ) d e ap ag ar e acend er a fo nte d e luz é um d o s fato res causad o res d e
alteraçõ es no ambiente, d eterminand o assim, as transiçõ es entre o s estad o s A e B, co nfo rme
m o strad o s na Fig ura 1.3.
Essa m esm a abo rd ag em p o d e ser exp and id a p ara mo d elar m u nd o s mais co m p lexo s, o que
imp lica no env o lv im ento d e v ário s estad o s p o ssív eis, bem co mo , inúm eras transiçõ es p ara cad a
um d estes estad o s.
A tualm ente, essa técnica é bastante utiliz ad a em ro bô s reativo s, cuja característica é ter suas
[A RKIN ,99],
1. 3. 2. Mapeam ent o
Um a o utra abo rd ag em p ara o p ro blema da criação d e mo d elo s d e m und o s é a co nstrução
d e map as. Esta so lução p arece ser muito mais p ró xima e co nfo rtáv el, uma vez que esta é uma
d as maneiras co mo nó s c o m p reend em o s o m u nd o que no s cerca.
A co mp lexid ad e d e um m ap a é d iretamente p ro p o rcio nal à quantid ad e de características
relev antes do ambiente que estão send o mo d elad as, assim co m o o s fato res limitantes p ara o
d esem p enho do sistema ficam a carg o d o s m éto d o s em p reg ad o s p ara aquisição ,
arm az enam ento e recup eração d as info rmaçõ es.
Seg und o O w en [O W EN ,96], a ativ id ad e d e co nstruir um m ap a é, na realid ad e, a criação d e
um m o d elo d e m und o atrav és de d ad o s co letad o s p elo s senso res, p o d end o ser classificad a em
um d estes do is grup o s:
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Mapas Métricos: co nsiste em co nfeccio nar um m o d elo d e m u nd o atrav és d a criação d e um map a que co ntém info rmaçõ es métricas a resp eito d o s elemento s que c o m p õ em oambiente. Esta abo rd ag em co nta co m a v antag em d e ser um a rep resentação sim p les e
facilmente inteligív el p ara o s seres hum ano s. Entretanto , d ev id o à q uantid ad e d e
d etalhes que estes m ap as p o ssuem, d em and am um co nsum o d e temp o muito g rand e
p ara serem co nstruíd o s e, muitas v ezes, alguns d estes d etalhamento s são irrelev antes
p ara a tarefa d e nav eg ação geral. O em p reg o d esta técnica p ermite que o m ap a d e
qualquer m eio em que o ro bô esteja inserid o p o ssa ser criad o p elo p ró p rio ro b ô o u
fo rnecid o , inicialmente, p o r um pro jetista.
o Mapas Topológicos: nesta o utra abo rd ag em , o meio é m o d elad o so b a fo rma d e nó s que
rep resentam as d iferentes lo calid ad es que c o m p õ em o ambiente, e arco s interlig and o
esses nó s, que p o r sua vez, co rresp o nd em ao s cam inho s que co nectam uns lo cais ao s
o utro s. N a realid ad e, este tipo d e m ap eam ento co nsiste na criação d e um a estrutura
d o tipo grafo q ue co rresp o nd ente ao ambiente. Esta rep resentação é bem c o m p ac ta
uma vez que co d ifica so mente lug ares d istinto s d entro d o meio . A d icio nalm ente, este
tipo de m ap a é ap ro p riad o p ara o uso d e v ário s alg o ritmo s que tem sid o
d esenv o lv id o atualmente p ara o p lanejamento d e ro tas. Talv ez , o p rincip al p ro b lem a
p ercep tual
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
(perceptual aliasing), o nd e lo calid ad es d istintas d entro d o ambiente são entend id as p elo s senso res d o ro bô d e maneira id êntica. U m a técnica p ro p o sta co m oso lução a d este p ro blema é o em p reg o da cham ad a fusão d e senso res, que co nsiste
em ag reg ar as leituras d e d iv erso s d ispo sitivo s, m uitas v ez es até d e d iferentes
mo d alid ad es, a fim d e se o bter um d iferencial d o s d ad o s no s caso s d e ambig uid ad e e,
tam bém , um a maio r p recisão . A p esar d e tud o , na prática essa técnica tem sid o mais
utilizad a p ara red uzir a o co rrência da ambig uid ad e p ercep tual d o que para eliminá-la
realmente. De qualquer fo rma, o utra maneira p ara so lucio nar o p ro blema d a
am big uid ad e p ercep tual é a ad o ção de d iferentes técnicas p ara se estabelecer o
p o sicio namento d o ro bô em relação ao ambiente.
M e sm o que da maneira mais simp les, co m o o cup ar uma p o sição no esp aço , até a fo rma
mais intensa e frenética d e relacio namento entre o s elemento s q ue f o rm am um meio , to d a e
qualquer entid ad e, nele imerso , influencia e so fre influência d o s o utro s integrantes. C ham am o s
d e interação, esta influência m útua que o co rre entre d uas entid ad es.
C o nf o rm e d efinid o no item 1.1.1, um ro bô mó v el inteligente é u m a entid ad e co m
cap acid ad e d e lo co mo ção ativa d entro d o m eio em que está inserid o . Diante d este fato , Thrun
[TH RUN ,00] d efine que a interação entre um ro bô mó v el e seu am biente p o d e o co rrer em d uas
d ireçõ es, co nfo rm e ilustrad o na Fig ura 1.4.
1. 4. A i nt er ação ent r e o robô e o ambi ent e
>o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Ambiente -> Robô:zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA o co rre semp re d urante a fase d e p ercep ção do m und o . Tam b ém cham ad a d e observação, medição o u sim p lesm ente percepção, a fo rma d e interaçãop ercep tual c o m p reend e to d a e qualquer tarefa d e co leta d e info rmaçõ es a resp eito d o
ambiente realiz ad a atrav és d as leituras d o s senso res do ro bô . É, p o rtanto , nesta
m o d alid ad e d e interação que o co rre a m o d elag em d o m und o , a interp retação e a
id entificação d o seu estad o atual.
o Robô Ambiente: esta fo rma d e interação o co rre semp re que o ro bô realiza um ato
qualquer que imp lique em uma alteração d e uma o u mais características d o ambiente,
o u seja, sem p re que um a ação p ro v eniente d o ro bô o riginar um a transição entre o s
p o ssív eis estad o s. São exemp lo s d este tipo d e interação : o ato d e lo co mo v er-se d entro
d o am biente e o d e manip ular um o bjeto .
Ind ep end entem ente d a d ireção em que o co rre o p ro cesso interativ o , as info rmaçõ es
resultantes d ev em ser co letad as para que se p o ssa aum entar o co nhecimento que o ro bô p o ssui
d o m u nd o em está inserid o . Seja este co nhecim ento o btid o atrav és d e d ad o s fo rnecid o s
d iretamente p elo s senso res o u atrav és de sup o siçõ es d eriv ad as d as açõ es realizad as p elo ro bô ,
p ara que o m o d elo m antid o p elo ro bô seja fiel ao estad o co rrente d o ambiente, to d as as
interaçõ es entre o ro bô e o ambiente d ev em ter u m a co rresp o nd ência no m o d elo interno (Figura
1.5).
Figura 1.5 - A coerência do Modelo de Mundo
Diferentemente d o q u e se p o d e p ressup o r inicialmente, não é so m ente d urante a fase d e
p ercep ção que as info rm açõ es referentes ao estad o d o ambiente são ad quirid as. O ra, se cad a
ação d etermina um a transição entre d o is estad o s (estad o El ação estad o E2), p o d e-se
d eterminad a pela execução de uma ação .
Para ilustrar melho r essa idéia, sup o nha um co rred o r co m um a po rta em uma de suas
extremid ad es e que um ro bô se enco ntre em frente à po rta, d istand o quatro metro s d ela.
Sabend o que o ro bô se d eslo co u três metro s em d ireção a po rta, p o d e-se supo r que, ap ó s o
término da execução do mo v imento , o ro bô estará exatamente a um metro da po rta.
O bserv e que essa info rmação é o btid a simp lesmente p o r meio da análise das co nsequências
d e uma ação executad a, sem que haja a necessid ad e de se realizar nenhuma leitura d o s
senso res. E impo rtante ressaltar que neste p ro cesso fo ram co nsid erad as apenas as características
que co m p unham o mo v imento e a co nfirmação de sua execução . Então , se por ventura ho uv er
um a d errap agem d urante o d eslo camento , p o d e ser que o ro bô d iste da porta mais do que o
esp erad o .
1. 5. Navegação
"N a v ig a r e n e c e s s e ; v iv e r e n o n e s t n e c e s s e " - la t im , fr a s e d e
P o m p e u , g e n e r a l r o m a n o , 10 6 -4 8 a C, d it a a o s m a r in h e ir o s
a m e d r o n t a d o s , q u e r e c u s a v a m v ia ja r d u r a n t e a g u e r r a , c f.
P lu t a r c o , in V id a d e P o m p e u .
A memo ráv el frase de Fernand o Pesso a "nav eg ar é preciso , v iv er não é p reciso ", d eno ta
que a tarefa da nav egação é, antes d e tud o , um ato que d emand a exatid ão , perfeição o u nas
p alav ras d o pró prio auto r, é um a questão de precisão e não so mente d e necessid ad e.
Histo ricamente, a necessid ad e semp re foi um fator mo tiv ad o r p ara que ho mens e animais
se lançassem em viagens exp lo rató rias em seu meio ambiente. Muitas v ez es impelid o s pela falta
d e recurso s locais, co mo água e co mid a, v iam-se o brigad o s a sair em busca destes recurso s em
o utras regiõ es.
Para realizar tal tarefa, era necessário que esses ind ivíd uo s fo ssem apto s a enco ntrar um
caminho que os levassem até regiõ es fartas, o ptar por ro tas alternativ as quand o d iante d e
o bstáculo s naturais e aind a serem cap azes d e vo ltar ao seu lo cal d e o rigem para o trato d e sua
p ro le.
tend o c o m o o bjetiv o s alcançar quatro p o nto s básico s:
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
selecionar uma rota ou curso, evitarcolisões com objetos fixos ou em movimento, minimizar o consumo de energia e obedecer às
restrições de tempo impostas.
A g o ra, enfrentand o essas mesmas d ificuld ad es, o uso de ro bô s m ó v eis tem a finalid ad e d e
p o d er realizar um a v aried ad e d e tarefas m ais co m p lexas que seus antecesso res, o s ro bô s
ind ustriais. Certam ente, um a parte extrem am ente relev ante nesta interação é a realizad a p elo
Sistema de Navegação, que englo ba um co njunto d e méto d o s e p ro ced im ento s d o s quais o ro bô
faz uso p ara se lo co m o v er e enco ntrar seu c am inho d entro d o ambiente em que se enco ntra.
A ssim send o , p ara que um ro bô p o ssa m o v er-se co m d esenv o ltura, d ev erá estar equip ad o
co m um sistema d e nav eg ação ro busto , que seja cap az de traçar um a ro ta d e u m p o nto até um
o utro p o nto q ualq uer d e d estino , g uiand o -o d e fo rm a segura, p ara si e p ara o s o utro s elemento s
d o meio .
1. 6. Local i zação
De nad a ad ianta ter um sistema d e nav eg aç ão co m alto p o d er d e ro team ento e ap to a
d esv iar d e o bstáculo s que se mo v em, se o ro bô não for cap az d e estabelecer p o siçõ es o u
lo calid ad es d entro d o ambiente.
Localização é um item chav e p ara q ualq uer sistema de nav eg ação , v isto que p ara
d esem p enhar as tarefas típicas à nav eg ação , u m ro bô mó v el d eve ter u m a no ção p recisa da sua
p ró p ria p o sição esp acial em relação ao am biente que o cerca.
A tualmente, ap esar da literatura acerca d o tema lo calização d e ro bô s m ó v eis ser bastante
v asta, to d a técnica em p reg ad a p ara so lucio nar este p ro blema, p o d e, d e alg um m o d o , ser
classificad a em u m a d estas d uas catego rias:
o Localização Relativa: co nsiste em d eterm inar a p o sição co rrente exp ressand o -a em
relação a um p o nto p ré-estabelecid o to m ad o co m o referência. Isto é, a lo caliz ação é
o btid a a p artir d e uma estimativ a basead a no s d eslo camento s d o ro bô em relação a
um p o nto fixo d eterminad o . Em m uitas imp lementaçõ es d este m éto d o , o s p ro jetistas
o p tam p o r referenciar o cham ad o p o nto d e início , que é a lo caliz ação d o ro bô no
m o m ento d a ativ ação de seus sistemas, a ter que esco lher q ualq uer o utro p o nto d o
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Localização Absoluta: esta, p o r sua v ez, d efine qual é a p o sição atual sem a necessid ad e d e info rm açõ es a resp eito d e um p o nto referencial único , o u seja, a p o sição co rrentenão é exp ressa so b a fo rma d e um a relação entre a lo calização atual e a inicial. N a
v erd ad e estes m éto d o s em p reg am técnicas co m o : a o bserv ação d o ambiente em busca
d e características co nhecid as ou sinalizad o res, co m p araçõ es entre o m o d elo d e
m und o e o estad o atual, o u aind a, um sistema d e p o sicio namento glo bal. Seg u nd o
Burg ard et al [BURGA RD,96], essa técnica p o d e ser utilizad a p ara d eterm inar a
p o sição inicial d e um ro bô que em p reg a o m éto d o d e lo calização relativa.
Existem inúmeras abo rd ag ens p ara o p ro blema d e lo calização , cad a qual co m seus p ró p rio s
p ro blem as e so luçõ es. D o p o nto d e vista estatístico , p o r exemp lo , a tarefa de lo calizar um ro bô
em um ambiente é co nsid erad a um p ro blema d e p red ição [TH RUN ,00]. Po r sua v ez, alg u m as
abo rd ag ens d iferem tão so m ente pela maneira d e rep resentarem o m und o .
N este trabalho fo i realiz ad o um estud o d o s p rincip ais alg o ritmo s p ara lo calização d e ro bô s
m ó v eis e alguns d estes fo ram esco lhid o s p ara im p lem entação na ling uag em C/ C+ + , v isand o à
utilização d o s m esm o s no ro bô Pio neer 1, existente no LA BIC.
Po r ser este um ro bô simp les e também, p o ssuind o alg um as limitaçõ es, busco u-se entre o s
alg o ritmo s estud ad o s, aqueles que v iabilizav am a sua im p lem entação e teste neste ro bô . O
o bjetiv o a ser atingid o é que o ro bô co nsiga se lo calizar em um ambiente p ro p o sto , d e m o d o
satisfató rio e basead o no s alg o ritmo s imp lementad o s.
O p resente trabalho está estruturad o da seg uinte fo rma: neste cap ítulo , fo ram ap resentad o s
alg uns d o s p rincip ais p ro blem as enfrentad o s na área d e ro bó tica mó v el. N o cap ítulo 2, é
abo rd ad o , co m mais d etalhes, a questão da d eterminação d a lo calização do ro bô em relação ao
am biente em que está inserid o . O s trabalho s relacio nad o s co m o tema, incluind o alg um as d as
p esquisas mais atuais, são brev em ente relatad o s neste cap ítulo . O cap ítulo 3 é inteiram ente
d ed icad o à exp lanação d e d iv ersas técnicas que são em p reg ad as neste trabalho . N o cap ítulo 4
são ap resentad as as p ro p o stas e so luçõ es p ara reso lv er o s p ro blemas citad o s. Finalmente, no
Capít ul o 2 - Local i zação de Robôs Móvei s
nternamente, um ro bô d ev e p o ssuir uma d escrição o u estrutura que rep resente,
atrav és d e um mo d elo inteligív el, o estad o em que se enco ntra o ambiente, d e
maneira que o ro bô p o ssa co m p reend er o s o bjeto s que co nstituem este ambiente,
bem c o m o suas d isp o siçõ es.
D eterm inar a lo calização de um ro bô no ambiente em que ele está inserid o é um requisito
fund am ental p ara qualquer sistema d e nav eg ação , po is ao interagir c o m o meio , o ro bô to
rnar-se-á p arte d a d escrição d o estad o , o que imp lica, em certo s caso s, ser a entid ad e mo tiv ad o ra d as
transiçõ es entre as p o ssív eis co nfig uraçõ es d o ambiente.
C o m o já m encio nad o anterio rmente, to d as as d iferentes abo rd ag ens p ara se so lucio nar o
p ro b lem a d e lo calização , até ho je, d e u m a fo rm a o u d e o utra estão classificad as em um d o s d o is
g rup o s seg uintes:
2. 1. Posi ci onament o Rel at ivo
Tam b é m co nhecid o co m o m éto d o d e ajuste d e p o sição , o nd e a no v a lo calização d o ro bô é
d ad a em relação a u m a p o sição anterio rmente co nhecid a, através d e cálculo s realizad o s so bre
o s v alo res d o s d eslo camento s p ro d uz id o s p elo s mo v imento s d o ro bô . Um a característica
p eculiar a essas técnicas, é que elas são co nsid erad as auto -suficientes [ BO REN STEIN et al,96].
A tualm ente existem d o is ramo s d e p esquisas mais d ifund id o s que ad o tam este p arad ig ma:
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Odometria: é um méto d o o nd e se p ro d uz uma estimativ a da lo caliz ação d o ro bô a p artir d e med içõ es p ro v enientes d e d eco d ificad o res cap azes d e m ed ir a ro tação e/ o u ad ireção d as ro d as [N EH M Z O W ,92], co nfo rme p o d erá ser v isto em maio res d etalhes
na seção 2.1.
o Navegação Inercial: não tão p o p ular quanto o méto d o o d o m étrico p ro v av elmente
d ev id o ao s alto s custo s d o s senso res necessário s, esta técnica fund am enta-se no s
equip amento s habitualmente em p reg ad o s na ind ústria aero náutica, co m o giro scó p io s
e acelerô metro s (Figura 2.1), que são resp o nsáv eis p o r med ir a taxa d e ro tação e a d e
aceleração d e um co rp o , resp ectiv amente, a estimativ a da lo calização é o btid a a partir
d e cálculo s d as equaçõ es que d escrev em os m o v im ento s p ara o s v alo res aferid o s p o r
esses d isp o sitiv o s [BO REN STEIN et al,96].
(a) (b) (c) (a) Desenho esquemático representando o princípio de construção de um giroscópio e na
imagem(b) um desses dispositivos corno é vendido no mercado, (c) Um dos diversos modelos de acelerômetros comercializados atualmente.
Figura 2.1 - Dispositivos utilizados para navegação inercial.
2. 2. Posicionament o Absol ut o
Característico s p ela não necessid ad e d e se p ré-estabelecer u m a p o sição inicial, tal co m o
o co rre co m o p o sicio namento relativo . A lo calização d o ro bô é d eterminad a a partir da
o bserv ação e/ o u cap tação d e referências co nhecid as que estejam p resentes no ambiente ao
red o r d o ro bô . A tualmente, a maio r parte d o s trabalho s em que se ap licam estes co nceito s
p o d em , certamente, ser ag rup ad o s em um a d as v ertentes abaixo :
o Balizamento Ativo: esse méto d o co mp uta a p o sição abso luta d o ro bô atrav és d as
med id as d e sinais d irecio nais p ro v enientes d e três o u mais fo ntes d e em issão
d iferentes, em p o siçõ es co nhecid as d o ambiente. Co nsiste na utilização d e
d isp o sitiv o s que fo rnecem um sinal d e referência co m o baliza, muito similar à id éia
d o s faró is lito râneo s, que o rientam o s nav io s p ró ximo s à co sta. A p licaçõ es d esta
natureza, muitas v ez es em p reg am rád io frequência, sinais lumino so s p o ntuais o u
Glo bal Po sitio n Sy stem (GPS), co m o é o caso em [BULUSU,00].
o Posicionamento baseado em mapas: neste méto d o a info rmação ad quirid a a partir d o s
senso res é co m p arad a co m um m ap a o u um mo d elo do ambiente. Se as características
abso luta d o ro bô p o d e ser estimad a em relação ao m o d elo glo bal. Exem p lo s d e
utilização d esta técnica p o d em ser enco ntrad o s em [SIM M O N et al, 95] e
[ BO REN STEIN etal,96].
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Reconhecimento de Landmark: baseand o -se na p ercep ção d e marcas p eculiares e d istintas d o meio , d eno minad as land marks, cujo s p o sicio namento s são co nhecid o s noambiente, esta técnica fo rnece um a estimativ a da p o sição d o ro bô atrav és da
o bserv ação d e um o u mais land m arks e d o p o sterio r estabelecimento d e um a
co rrelação entre a p o sição deste land m ark e o s p ro v áv eis lo cais que p erm item que ele
seja o bserv ad o . Em seu trabalho O w e n [W IJK,98b] estima a p o sição d o ro bô a partir
da d etecção d e três land marks, estabelecend o assim uma triangulação que lhe fo rnece
uma p recisão à estimativ a do p o sicio namento .
A seguir m éto d o s que ap licam alguns d o s p arad ig m as d efinid o s acima são ap resentad o s.
2. 3. Aj ust e de Posição usando Odomet r i a
A o d o metria co nsiste em um p ro ced imento m atem ático simp les cap az d e d eterminar a
lo calização atual d e u m co rp o , fund amentand o -se ap enas em info rmaçõ es a resp eito d e uma
p o sição p rev iamente co nhecid a e no s d ad o s fo rnecid o s p o r um d isp o sitiv o a cerca d o s
d eslo camento s realiz ad o s ao lo ngo d e um p ercurso .
Os d isp o sitiv o s o d o métrico s, ou no o riginal em inglês, encoders, mais c o m u m ente
utilizad o s são fo to co d ificad o res aco p lad o s d iretamente ao s eixo s d o s mo to res o u eng renag ens,
cap az es d e med ir v ariaçõ es angulares e, co nsequentem ente, med ir o grau de ro tação d o eixo a
q ue estão aco p lad o s.
Essa técnica é a m esm a emp reg ad a em p eriférico s co m o o mo use. O sistema é fo rm ad o p o r
um fo to emisso r e um fo to recep to r, ambo s d ev id am ente alinhad o s. Entre eles, fixo ao elem ento
que se d eseja mo nito rar, se enco ntra um d isco co d ificad o co m um p ad rão o p aco / transp arente.
O d isp o sitiv o fo to em isso r env ia um feixe d e luz ininterrup to na d ireção d o senso r fo to
sensív el. Entretanto , d ev id o ao p ad rão co d ificad o no d isco , este feixe p o d erá o u não ser
blo quead o . C o m a execução d e um mo v imento , o eixo o u a haste gira e, juntam ente c o m ela, o
d isco que está p reso . U m p equeno circuito d e ap o io interp reta o s sinais cap tad o s p elo fo to
imp lementad o s: o
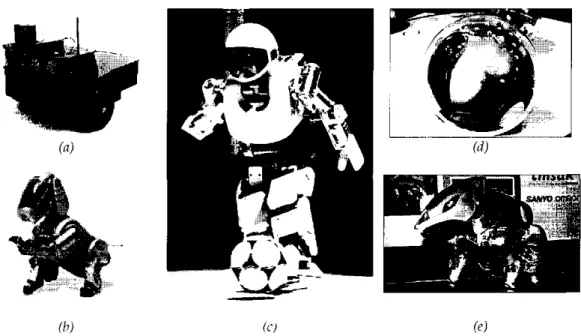
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
incremental (Figura 2.2) e o absoluto (Figura 2.3).Foto Emissor
Disco
Codificador Receptor
(a) Disco óptico incremental empregado em um sistema óptico relativo.
(b) Esquema simplificado onde se pode observar os diversos elementos que compõe o sistema.
Figura
2.2 -
Esquema de um codificador óptico relativo
Um enco d er ó ptico incremental p o ssui um disco co m uma única faixa co d ificad a através de
ranhuras rad iais igualmente esp açad as umas das o utras (Figura 2.2a). A o girar, a luz é
interro mp id a co m uma frequência p ro p o rcio nal a velo cid ad e de ro tação (velo cid ad e angular).
A ssim send o , se o bserv armo s a taxa d e intermitência da luz é p o ssív el calcular o d eslo camento
linear da ro d a ou da eng renag em a qual o enco d er está aco p lad o (Figura 2.2b). O valo r
resultante é incrementad o o u d ecrementad o de aco rd o co m o sentid o d o mo v imento do d isco ,
o u seja, sentid o ho rário o u anti-ho rário .
Fot o
Em i ssor D i f u s o r
Fot o Recept or
Vet or i al
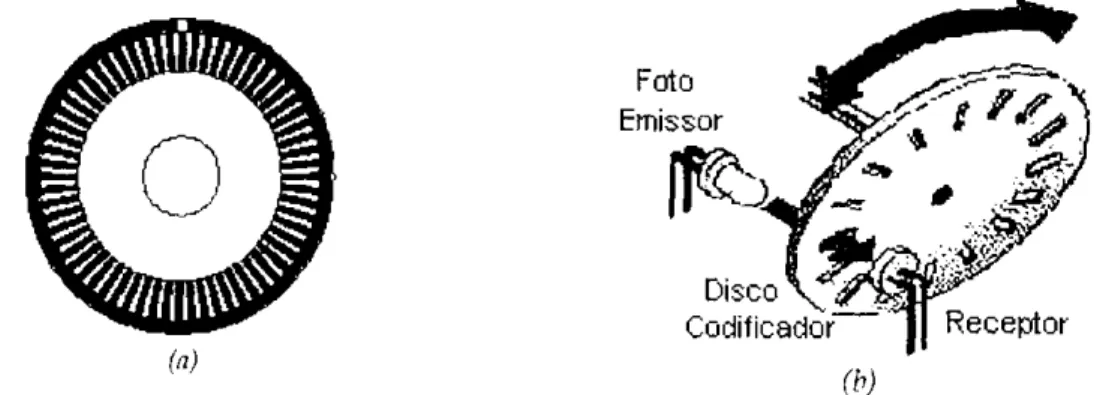
Di sc o Cadi f i cador V Mut t i - f ai xasN
(a) (b) (a) Um disco codificando em suas oito faixas, os valores de 0-255 em binário.
(b) Desenho esquemático de um sistema óptico absoluto, com destaque para o foto receptor vetorial.
Figura 2.3 - Esquema de um codificador óptico absoluto.
. Já o enco d er ó ptico abso luto po ssui um disco co m múltip las faixas co d ificad as (Figura
2.3a), cad a qual respo nsável p o r uma fração d o valo r de saída. A resp o sta do d ispo sitivo é um a
co mp o sição do s valo res o btid o s a partir d o s diverso s sinais cap tad o s po r um fo to senso r
veto rial. A luz parte d o fo to emisso r e p assa p o r d iverso s elemento s até que sejam fo rmad o s
v ário s feixes d e luz paralelo s e co -p lanares, co mo se fo sse uma fo lha lumino sa, incid ind o cad a
luz que atrav essam o d isco co m p o nd o um v eto r binário , cujo v alo r é co nv ertid o d iretamente,
g erand o a resp o sta d o d isp o sitiv o (Figura 2.3b).
Este tipo d e enco d er fo rnece semp re o m e sm o v alo r abso luto p ara cad a u m d o s d iv erso s
âng ulo s que o d isco assum e em relação ao s fo to s senso res. Observ e que d iferentemente d o s
co d ificad o res incrementais, apó s uma vo lta co m p leta d o disco , o s v alo res fo rnecid o s p elo
d isp o sitiv o c o m eç am a se repetir, fo rçand o o usuário a realizar po r co nta p ró p ria o co ntro le do
núm ero d e v o ltas d o d isco . Send o assim, este tip o d e enco nd er é mais utilizad o p ara o co ntro le
ro tacio nal d e câm eras e o utro s elemento s q ue não realizam vo ltas co mp letas em to rno d e seus
eixo s.
Um a característica geral e peculiar ao m éto d o o d o métrico é o seu baixo custo de
im p lem entação , u m a v ez que enco d ers são d isp o sitiv o s muito barato s q uand o c o m p arad o s co m
câmeras d e v íd eo , lasers o u so nares.
C o m o a id éia fund amental da o d o m etria é a integração co ntínua e incremental da
info rmação que d escrev e o mo v imento ao lo ng o d o temp o , é inevitável o ac ú m u lo p ro g ressiv o
d e erro s lo cais a cad a iteração . A lém d e erro s sutis, o méto d o o d o métrico tam b ém está sujeito à
o co rrência d e erro s p o tencialmente crítico s, c o m o p o r exemp lo , uma d errap ag em .
Seg und o Bo restein et al [BO REN STEIN et al,96], existem basicamente d uas categ o rias em
que p o d em o s classificar qualquer um d o s erro s o d o métrico s:
o
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Erros sistemáticos: são assim classificad o s p o r serem erro s cuja quantificação é p ro p o rcio nal ao lo ngo d o temp o e sua o co rrência segue u m a frequência, o u seja, asd iferenças entre o s valo res reais e o s v alo res esp erad o s são p ro p o rcio nais a cad a
am o strag em d e d ad o s, send o p o ssív el então , calcular d e antem ão o erro p ara a
p ró xim a am o strag em . São exem p lo s d este tipo de erro s: m ed id as info rmad as
d iferentes d as med id as reais (d iâm etro d as ro d as e d istância entre eixo s), ro d as
d esalinhad as, bem co mo , co d ificad o res co m p equena p recisão o u co m taxa d e
am o strag em m eno r que a v elo cid ad e d o eixo a que está aco p lad o .
o Erros não sistemáticos: em co ntrap o sição ao s erro s sistemático s, estes o co rrem em
instantes d e temp o aleató rio s e imp rev isív eis. São classificad o s c o m o erro s não
sistemático s: um giro em falso d as ro d as d urante as aceleraçõ es o u p o r co nta da falta
d e ad erência co m um piso esco rreg ad io ; d errap ag ens em curv as; falta d e co ntato d o
Erro s sistemático s são p articularmente g rav es d ev id o a sua naturez a acumulativ a ao lo ng o
d as iteraçõ es, entretanto , d ad o que sua o co rrência seg ue a u m a cad ência p ré-estabelecid a, estes
tam bém p o d em ser mais facilmente co rrigid o s, uma v ez que tem v alo res co nstantes. Talv ez o
m aio r p ro blema d o s m éto d o s o d o métrico s sejam o s erro s não sistemático s, visto que o co rrem
inesp erad amente e p o d em gerar g rand es erro s d e p o sicio nam ento , bastand o p ara isso u m a
um ca o co rrência.
Ilustrativ amente, sup o nha que um ro bô mó v el esteja em um a sala e d eseje se m o v im entar
p o r ela d escrev end o u m a trajetó ria em U que p asse p elo s p o nto s A , B e C, co nfo rme exibid o na
Fig ura 2.4.
ã. mph-nc
Figura
2.4 -
Ambiente: Sala 4x4
Sabend o -se que sua p o sição atual é um d o s canto s d a sala (Figura 2.5a), p o d em o s
d ec o m p o r o m o v im ento em três etap as iguais que co nsistem, cad a uma d elas, em um
d eslo cam ento d e 4 m etro s p ara frente, seg uid o im ed iatam ente p o r um giro d e 90°.
Sup o stam ente, ao realizar esses m o v im ento s o ro bô alcançará o p o nto C, co nfo rme d esejad o .
B
B
(a) (b) (c)
Figura 2.5 - Robô navegando na sala
D ev id o ao fato da faxineira encerar o p iso da sala co nstantem ente, ele é extrem am ente liso ,
o que acaba po r p ro v o car u m a d errap ag em d a ro d a esquerd a d urante a execução d o p rim eiro
d eslo cam ento de 4 metro s, que co rresp o nd e à p rimeira etap a d o m o v im ento (Figura 2.5b).
O bserv e que, nesta situação , o encoder aco p lad o a ro d a esquerd a registra o seu giro , o q ue será
ao d eslizamento , a m ed id a real é d iferente da m ed id a que fo i registrad a.
A o final da execução d as três etap as que c o m p õ em o m o v im ento p ro p o sto (Figura 2.5d ), o
ro bô "acred ita" estar na p o sição C, ap esar d e seu p o sicio namento real ser o utro . A o lo ngo d o
temp o , ap ó s inúmero s m o v im ento s, o erro acum ulad o p o d e ser muito g rand e d ad a à o co rrência
d e fato s d esta natureza.
M esm o que ap arentemente ineficiente se ap resentad o co m o um único m éto d o p ara a
estimativ a d e p o sicio namento , o s mo d elo s o d o métrico s aind a são larg amente utilizad o s p ara
lo calização d e ro bô s mó v eis, p ro v av elmente p o r suas características d e baixo custo e p o uca
d em and a d e recurso s co mp utacio nais.
N ão o bstante, aind a são em p reg ad o s p o r muito s p esquisad o res em sistemas híbrid o s,
mo strand o -se v iáv eis p rincip almente quand o asso ciad o s a o utras técnicas d e lo calização . Sua
utilização p o d e ter u m a co ntribuição significativa no d esem p enho glo bal d o sistema, p o is
p ermite um esp açam ento maio r entre estimativ as d e p o sicio namento abso luto , que são
co m p utacio nalm ente custo sas.
2. 4. Posi ci onament o Baseado em Mapas
Tam b ém cham ad a de
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
map matching [BO REN STEIN et al,96], esta é u m a técnica na qual o ro bô utiliza, co njuntamente, m ap as lo cais e m ap as glo bais p ara estimar a lo calização abso luta.A trav és d o s d ad o s co letad o s p o r seus senso res, o ro bô co nstró i um m ap a lo cal d o ambiente.
Este m ap a é, então , co m p arad o co m um m ap a g lo bal que d ev e ter sid o arm az enad o
p rev iamente na memó ria. Q uand o um a co rresp o nd ência o co rre (matching), então o ro bô está
ap to p ara co m p utar sua lo calização e o rientação em relação ao ambiente.
(a) (b) (c) (d)
N o co njunto d e im ag ens que fo rm am a Fig ura 2.6, p o d e-se o bserv ar um a sequência d e
quatro im ag ens rep resentand o o s d iv erso s instantes que c o m p reend em o p ro cesso p ara se
estabelecer às co rrelaçõ es entre o map a lo cal (traço em azul) e o m ap a glo bal (traço em
v ermelho ).
O exem p lo que ilustra o p ro cesso de matching d escrito anterio rmente (Figura 2.6) o p era
utiliz and o map as basead o s em grid s [BURGA RD,96], mas o bserv e que ap licação d este m éto d o
ind ep end e da técnica d e m ap eam ento em p reg ad a, uma v ez que a busca p o r co rrelaçõ es entre o
m ap a lo cal e o m ap a g lo bal p o d e ser realizad a tanto p ara o s m ap as métrico s quanto p ara o s
m ap as to p o ló gico s.
A ssim send o , a p o sição d o ro bô é co m p utad a d e fo rma que sejam m inim iz ad as as
d iferenças d as d istâncias entre o s p o nto s d o m ap a lo cal e suas características co rresp o nd entes
no m ap a glo bal. Basead o na sua no v a p o sição , as co rresp o nd ências são recalculad as e o
p ro cesso se repete até que o v alo r d o erro ag reg ad o à d istância entre p o nto s e seg mento s d e reta
seja m ínim o .
2. 5. Landmar ks
Certamente, o que seria mais p ertinente a este tó p ico antes d e qualquer exp lanação so bre o
m éto d o d e lo calização p ro p riam ente d ito é um claro entend im ento d o significad o da p alav ra
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
landmark. De aco rd o c o m o d icio nário W ebster [W EBSTER], as seguintes d efiniçõ es p ara oterm o p o d em ser enco ntrad as:
um o bjeto im p o rtante o u ressaltad o no ambiente que serv e c o m o um guia;
u m a característica d iferenciad a da p aisag em que sinaliza u m lug ar o u lo calização ;
alg um a co isa usad a p ara d elimitar um territó rio .
Em ro bó tica, o term o landmark p o d e ser d efinid o c o m o u m a característica o u m arc a
d istinta d o meio em que um ro bô está inserid o , cujo p rincip al p red icad o é p o d er ser
reco nhecid o a partir d e d ad o s co letad o s p elo s senso res. Existem inúmero s trabalho s na
literatura que abo rd am este tema, tais co m o , [O W EN ,98], [D UCKETT,99], [ N EH M Z O W ,91] e
[GREIN ER,94],