Dinˆamica de homeomorfismos
homot ´opicos `a Dehn twists
Br´aulio Augusto Garcia
T
ese apresentada
ao
I
nstituto de
M
atem
atica e
´
E
stat
´
ıstica
da
U
niversidade de
S ˜
ao
P
aulo
para
obtenc
¸ ˜
ao do t
´
ıtulo
de
D
outor em
C
i
encias
ˆ
Programa: Matem´atica Aplicada
Orientador: Prof. Dr. Salvador Addas Zanata
Durante o desenvolvimento deste trabalho o autor recebeu aux´ılio financeiro da
FAPESP
Dinˆamica de homeomorfismos
homot ´opicos `a Dehn twists
Esta tese cont´em as correc¸ ˜oes e alterac¸ ˜oes sugeridas pela Comiss˜ao Julgadora durante a defesa realizada por Br´aulio Augusto Garcia em 02/02/2012. O original encontra-se dispon´ıvel no Instituto de Matem´atica e Estat´ıstica da Universidade de S˜ao Paulo.
Banca Examinadora:
• Prof. Dr. Salvador Addas Zanata (orientador) - IME-USP.
• Prof. Dr. Fabio Armando Tal - IME-USP.
• Prof. Dr. Pedro Antonio Santoro Salom˜ao - IME-USP.
• Prof. Dr. Andr´es Koropecki- UFF.
DEDICAT ´
ORIA
Dedico essa tese aos meus
pais.
AGRADECIMENTOS
Agradec¸o...
A minha fam´ılia por compreender e perdoar minha ausˆencia.
Ao meu amor Ira por estar sempre ao meu lado, por contribuir muito em minha vida (desde o in´ıcio da graduac¸˜ao) e por me deixar cada dia mais feliz. Te amo.
Ao meu amigo-irm˜ao Felipe Chaves, pelas conversas sobre o universo, Raul Seixas, etc., nas montanhas de Minas, onde iniciamos nossos estudos s´erios em f´ısica e depois em matem´atica.
Ao meu orientador Dr. Salvador, a quem posso chamar de amigo e a quem tenho uma d´ıvida impag´avel, por me introduzir na dinˆamica topol ´ogica, por ser um ´otimo professor, pesquisador, etc., e, principalmente, por ser uma pessoa de grande humildade e honestidade, tanto academicamente quanto pessoalmente. Gostaria de dizer que me sinto uma pessoa privilegiada de ter te conhecido e de ter trabalhado em minha tese sob sua orientac¸˜ao. Obrigado pelas caminhadas no campus da USP, onde realiz´avamos a pesquisa sobre Dehn twists.
Ao professor Dr. F´abio Tal, por participar dessas caminhadas pela USP, por sempre estar dispon´ıvel para conversar sobre matem´atica e por ter dado grandes ideias na elaborac¸˜ao da tese.
Aos professores Dr. Andre de Carvalho e Dr. Philip Boyland pelo excelente curso sobre teoria de Nielsen-Thurston.
Ao meu amigo e tamb´em companheiro de sala Valentim, pelas discuss ˜oes sobre matem´atica, sistemas dinˆamicos, f´ısica, literatura (brasileira, espanhola, ...) e a vida. Tamb´em a Sebastiam por estar muitas vezes nessas discuss ˜oes.
`
A minha amiga Tatiane, por ser companheira de caf´e (mesmo ela sempre tomando
ch´a) e aos meus outros amigos do IME e CBPF, Lucas, Ant ˆonio, Anderson, Pricila, Gustavo, Humberto, Grasi, Bittencourt...
Aos funcion´arios e professores do IME, pelo ambiente acolhedor proporcionado. Aos professores que me deram aula (da UNIFEI e do IME), pela dedicac¸˜ao e profis-sionalismo.
`
A Universidade de S˜ao Paulo, pela oportunidade de estudo e por toda a in-fraestrutura oferecida.
`
A UNIFEI, por ter sido meu berc¸o acadˆemico. Bem como aos meus primeiros mestres de graduac¸˜ao, Baˆeta Segundo, Luis Fernando e Vit ´orio De Lorenci.
Aos professores (Clodoaldo, Saulo, ...) e colegas (Jaime, Borba, ...) do futebol. Sou grato por ter vivido com esses profissionais que levam o ensino p ´ublico a s´erio, o que s ´o reforc¸a minhas convicc¸ ˜oes.
Ao pessoal da rep ´ublica, que foram minha fam´ılia aqui em S˜ao Paulo, Danilo, Maguinho e Fabr´ıcio, companheiros de todas as horas!
`
A FAPESP, pelo apoio financeiro, que ´e fundamental numa cidade como S˜ao Paulo.
A todos aqueles que contribu´ıram, mesmo que indiretamente, na realizac¸˜ao desse trabalho. Muito obrigado!
Amanhece, amanhece, amanhece, amanhece, amanhece o dia Um leve toque de poesia Com a certeza que a luz que se derrama nos traga um pouco, um pouco, um pouco de alegria! A frieza do rel ´ogio n ˜ao compete com a quentura do meu corac¸ ˜ao Corac¸ ˜ao que bate 4 por 4 sem l ´ogica e sem e sem nenhuma raz ˜ao Bom dia sol !!! Bom dia, dia !
Corac¸ ˜aoNoturno: RaulSeixas.
RESUMO
Dinˆamica de homeomorfismos homot ´opicos `a Dehn twists.
No presente trabalho apresentamos um estudo sobre a dinˆamica de homeomor-fismos do toro homot ´opicos `a Dehn twists. No caso conservativo, provamos que se f preserva ´area e tem um levantamento ˆf para o cilindro com fluxo zero, ent˜ao, precisamente, ou f ´e um homeomorfismo do anel, ou possui pontos no cilindro com velocidades verticais positiva e negativa, por iteradas de ˆf. Isso resolve a conjectura de Boyland para essa classe de homotopia. J´a no caso geral, mostramos um resul-tado an´alogo. Al´em disso, fornecemos uma condic¸˜ao extremamente simples que, quando satisfeita, implica que o conjunto de rotac¸˜ao vertical cont´em um intervalo e, portanto, que f tem entropia topol ´ogica positiva.
Palavras-chave:conjunto de rotac¸˜ao vertical, Dehn twists, omega limites, decomposic¸˜ao por tijolos.
ABSTRACT
Dynamics of homeomorphisms homotopic to Dehn twists.
The present thesis is concerned with the dynamics of homeomorphisms of the torus homotopic to Dehn twists. We prove that if f is area preserving and it has a lift
ˆ
fto the cylinder with zero flux, then either f is an annulus homeomorphism, or there are points in the cylinder with positive vertical velocity and others with negative vertical velocity, for iterates of ˆf. This solves a version of Boyland’s conjecture to this setting. We extend some theorems we already obtained for Dehn twists with the area preservation hypothesis to a more general class. Finally, we also give a simple explicit condition which, when satisfied, implies that the vertical rotation set contains an interval and thus also implies positive topological entropy.
Keywords: vertical rotation set, Dehn twists, omega limits, brick decompositions.
SUM ´
ARIO
1 Introduc¸˜ao 1
1.1 Considerac¸ ˜oes Preliminares . . . 2 1.2 Objetivos . . . 9 1.3 Contribuic¸ ˜oes . . . 10
2 Fundamentos 12
2.1 O Conjunto de Rotac¸˜ao . . . 12 2.2 O Conjunto de Rotac¸˜ao Vertical . . . 14 2.3 Implicac¸ ˜oes Dinˆamicas deρv(•) . . . 19
3 Ferramentas B´asicas 22
3.1 Os conjuntosB−
S eB
+
N . . . 22
3.2 Os conjuntosω-limite deB−
S eB
+
N. . . 31
3.3 Homeomorfismos de Brouwer . . . 39 3.4 Decomposic¸˜ao do plano por tijolos . . . 40
4 Provas dos principais resultados 42
4.1 Demonstrac¸˜ao do teorema 1.3.1 . . . 42 4.2 Demonstrac¸˜ao do teorema 1.3.3 . . . 55
LISTA DE FIGURAS
1.1 Ac¸˜ao de um Dehn twist . . . 7
1.2 Dinˆamica de um Dehn twist emR2/Z2 . . . 7
1.3 Dinˆamica reduzida de ˆf ao anel . . . 10
2.1 Levantamento ˆf com fluxo zero . . . 18
2.2 Aplicac¸ ˜oes de recobrimento. . . 21
3.1 Dinˆamica na compactificac¸˜ao . . . 23
3.2 Arcos cont´ınuos simplesΓN e ¯ΓN . . . 26
3.3 B− S e ¯B − S n˜ao vazios. . . 27
3.4 Os conjuntosB− S e ¯B − S . . . 28
3.5 Orbitas uniformemente limitadas no cilindro . . . .´ 29
3.6 Orbitas ilimitadas em apenas uma direc¸˜ao do cilindro . . . .´ 30
3.7 Levantamento deω(B− S) (vertical). . . 35
3.8 Levantamento deω(B− S) (horizontal). . . 36
3.9 Levantamento dos arcos cont´ınuos simples. . . 37
4.1 Transladado vertical deπ−1(ω(B− S)). . . 47
4.2 Decomposic¸˜ao do Plano por Tijolos Livres para ˜g. . . 53
4.3 Violac¸˜ao do fluxo zero. . . 56
CAP´ITULO
1
INTRODUC
¸ ˜
AO
Um par ordenado da forma (X, f) ´e dito ser umsistema din ˆamicose f ´e uma aplicac¸˜ao deXemX, isto ´e, f : X−→X. O conjuntoX ´e denominadoespac¸oe f din ˆamica. A ´orbita (futura) de um ponto de X ´e dada por iterac¸ ˜oes da dinˆamica, ou seja, se x ∈ X, ent˜ao orb(x) = {x, f(x), f(f(x)), ..., fn(x), ...}, em palavras, uma esp´ecie de
movimento que evolui com o tempo (no caso, os n ´umeros naturais) sob aplicac¸˜ao de uma lei repetidamente.
Nesse contexto, a pergunta chave ´e a existˆencia de pontos peri ´odicos para a dinˆamica f, isto ´e, existˆencia dexf tal queorb(xf)={xf, f(xf), ..., fn−1(xf)}, para algum n∈N∗. Um sistema dinˆamico ´e uma abstrac¸˜ao matem´atica que serve para modelar e
fornecer previs ˜oes sobre in ´umeros fen ˆomenos naturais, sociais, econ ˆomicos e outros. QuandoX ´e uma superf´ıcie topol ´ogica e a aplicac¸˜ao f um homeomorfismo sobre
X, temos um sistema dinˆamico topol ´ogico (invers´ıvel). Nesse caso, a quest˜ao mais geral que ´orbitas peri ´odicas ´e a existˆencia de conjuntos minimais, onde K ⊂ X ´e minimal se, para todo x ∈ K, ω(x) = ∩∞
i=1∪
∞
j=ifj(x) = K, ou seja, o omega limite de
qualquer ponto deK´e todoK(veja [24]). O estudo da dinˆamica de homeomorfismos em superf´ıcies por m´etodos topol ´ogicos provavelmente se iniciou com H. Poincar´e, com seu “ ´ultimo teorema geom´etrico”, hoje em dia mais conhecido como teorema de Poincar´e-Birkhoff.
Um conceito que tem-se mostrado muito ´util em sistemas dinˆamicos ´e a noc¸˜ao de
n ´umero de rotac¸ ˜ao, que foi introduzido por Poincar´e no caso de um homeomorfismo do c´ırculo que preserva orientac¸˜ao, bem como as definic¸ ˜oes e generalizac¸ ˜oes a partir
1.1 Considerac¸ ˜oes Preliminares 2
desse. Para homeomorfismos do c´ırculo, ele mostrou que todas as ´orbitas possuem o mesmo n ´umero de rotac¸˜ao e, juntamente com os trabalhos de Denjoy, esse n ´umero (o n ´umero de rotac¸˜ao do homeomorfismo) essencialmente classifica a dinˆamica, sendo assim, um poderoso invariante topol ´ogico. De fato, quando este n ´umero ´e racional, sempre existem ´orbitas peri ´odicas, todas com o mesmo per´ıodo, e todas as ´orbitas s˜ao homocl´ınicas ou heterocl´ınicas `as ´orbitas peri ´odicas. J´a no caso em que o n ´umero de rotac¸˜ao ´e irracional, n˜ao existem ´orbitas peri ´odicas e todas as ´orbitas se ”ordenam”como as ´orbitas de uma rotac¸˜ao irracional de mesmo n ´umero. Al´em disso, ou todas s˜ao densas, ou existem intervalos errantes e um conjunto minimal, onde todas as outras ´orbitas nascem e morrem, veja [27] e [26].
Esse conceito foi estendido para endomorfismos do c´ırculo de grau um, por Newhouse, Palis e Takens, e para homeomorfismos de superf´ıcie como o anel e o toro, por M. Misiurewicz, K. Ziemian, J. Franks, e outros com a definic¸˜ao de intervalo e conjunto de rotac¸˜ao. Em termos grosseiros essa t´ecnica permite medir, quando existir, a velocidade m´edia da ´orbita de um ponto em rotac¸˜ao ao redor de buracos no espac¸o sob iterac¸˜ao da dinˆamica. E, se o “ conjunto de rotac¸˜ao tiver interior ” ent˜ao, temos que a dinˆamica possuientropia topol ´ogica positiva, veja [24] e [29].
1.1
Considerac¸ ˜oes Preliminares
O objetivo da presente sec¸˜ao ´e motivar o estudo dos homeomorfismos homot ´opicos `aDehn twist no toro. Para isso, iniciemos com a classificac¸˜ao de homeomorfismos do toro. Primeiramente, considere o toro (plano) como sendoR2/Z2e o denotemos porT2. O conjunto dos homeomorfismos deT2, Homeo(T2), pode ser particionado em, essencialmente, trˆes classes de equivalˆencia atrav´es da relac¸˜ao de homotopia entre aplicac¸ ˜oes do toro, a saber:
Homeo(T2)/H:•• ={[Anosov linear ]; [ordem finita ]; [redut´ıvel]},
onde H : • • ´e a relac¸˜ao de homotopia, ou seja, f,g ∈ Homeo(T2) s˜ao tais que
H : f gse, e somente se, existe uma aplicac¸˜ao (homotopia)H : T2×[0,1] −→T2
cont´ınua e tal que H0(•) = H(•,0) = f(•) e H1(•) = H(•,1) = g(•). Se para todo
1.1 Considerac¸ ˜oes Preliminares 3
Observac¸˜ao 1.1.1. Em superf´ıcies fechadas o conceito de homotopia e isotopia entre aplicac¸ ˜oes coincidem, veja [21].
Essa classificac¸˜ao ser´a discutida nos pr ´oximos par´agrafos. Seja f : T2−→T2um
homeomorfismo do toro, ent˜ao, temos uma aplicac¸˜ao induzida no grupo fundamen-tal do toro, da seguinte forma
[γ]∈π1(T2)7−→[f ◦γ]∈π1(T2),
isto ´e, pela ac¸˜ao de f nos lac¸os deT2. Denotemos essa aplicac¸˜ao induzida por
f∗: π1(T2)−→π1(T2).
Utilizando a estrutura aditiva deπ1(T2), com sua base usual dado pelo isomorfismo
natural π1(T2) Z2, podemos ver que f∗ ´e um isomorfismo e, portanto, pode ser representado como um elemento de GL(2,Z) = {A ∈ M2x2(Z) : detA , 0}. Reci-procamente, se A ∈ GL(2,Z), a transformac¸˜ao linear invert´ıvel A : R2 −→ R2 se
projeta a um homeomorfismo de T2, denotado por φA. Pois, A(( ˜x,y˜)+(n1,n2)) =
A( ˜x,y˜) +(m1,m2) onde ( ˜x,y˜) ∈ R2 e (n1,n2),(m1,m2) ∈ Z2. Portanto, a aplicac¸˜ao
( ˜x,y˜) 7→ A( ˜x,y˜) passa ao quociente deR2 porZ2, produzindo um homeomorfismo φAdo toro denominado automorfismo linear.
N˜ao ´e dif´ıcil ver que todo f ∈ Homeo(T2) ´e homot ´opico a um automorfismo linear φA, para algum A ∈ GL(2,Z). Desse modo, a caracterizac¸˜ao dos automorfismos
lineares, φA, fornece a classificac¸˜ao dos elementos de Homeo(T2). Mas esses s˜ao o
conjunto GL(2,Z), que ´e caracterizado pela func¸˜ao trac¸o (ou pelos autovetores de A). Com efeito, seja A ∈ GL(2,Z), ent˜ao, detA = ∓1. Estamos interessados nos casos que preservam orientac¸˜ao, portanto, considereA∈det−1(1)⊂GL(2,Z), ou seja,
A∈SL(2,Z) e tem autovalores dado por
λ± = trac¸o(A)±
p
trac¸o(A)2−4
2 .
Nessas condic¸ ˜oes, o trac¸o deAdetermina univocamenteλ±no plano complexo e, consequentemente, fornece a partic¸˜ao de Homeo(T2) nas ditas classes Anosov linear,
ordem finita e redut´ıvel. Pois:
1. |trac¸o(A)| > 2, A tem autovalores λ e λ−1 com |λ| > 1. Nesse caso, A ´e dita
1.1 Considerac¸ ˜oes Preliminares 4
2. trac¸o(A)∈ {−1,0,1},Atem autovaloresλe ¯λcomλn=1, para algumn∈ {3,4,6}
e portantoAn=Id. Nesse casoφ
A´e de ordem finita. Tamb´em, setrac¸o(A)=±2, A ´e de ordem finita (comn=1 ou 2) se seu autovalor n˜ao tiver multiplicidade 2, ou seja,Apossui dois autovetores associado ao autovalor.
3. Caso contr´arioA ´e dita redut´ıvel.
Pode-se mostrar que no ´ultimo caso, a menos de mudanc¸as de coordenadas,Atem a forma
A=
±1 m
0 ±1
2×2
ondem∈Z∗. Nesse caso, a aplicac¸˜ao induzidaφArecebe o nome de Dehn twist (ou
twist de Dehn, ou Shear), veja [16] e [7]. Em suma, temos o seguinte teorema de caracterizac¸˜ao:
Teorema 1.1.2. Seja f : T2 −→ T2 um homeomorfismo. Ent˜ao, f ´e homot ´opico a, exatamente, um dos homeomorfismos abaixo:
1. Anosov linear;
2. Ordem finita;
3. Dehn twist.
A pr ´oxima proposic¸˜ao fornece algumas simples equivalˆencias em termos da dinˆamica no toro, grupo fundamental e no recobrimento.
Proposic¸˜ao 1.1.3. Seja f : T2 −→T2 um homeomorfismo. Ent˜ao, s˜ao equivalentes:
1. f ´e isot ´opico aφA.
2. f∗age sobreH1(T2)Z2na base can ˆonica pela matrizA.
3. Qualquer levantamento de f, ˜f para R2 (recobrimento universal) pode ser escrito como
˜
f( ˜x,y˜)=A( ˜x,y˜)+γ( ˜x,y˜),
1.1 Considerac¸ ˜oes Preliminares 5
4. Se ˜f ´e levantamento de f paraR2, ˜
f(( ˜x,y˜)+(n1,n2))= f˜( ˜x,y˜)+A(n1,n2),
para todo ( ˜x,y˜)∈R2 e para todo (n
1,n2)∈Z2.
No que segue, analisaremos as trˆes classes de homeomorfismos do ponto de vista dinˆamico.
Quando a matrizA´ehiperb ´olica, o seguinte teorema garante que homeomorfismos isot ´opicos `aφA possuem “mais dinˆamica” queφA, em outras palavras, um Anosov
linear tem a menor complexidade dinˆamica em toda sua classe de isotopia. Esse teorema ´e frequentemente conhecido como teorema de (Franks [24]) estabilidade por isotopia sobre o toro.
Teorema 1.1.4. Se f :T2 −→T2 ´e um homeomorfismo isot ´opico a um Anosov linear,
φA, ent˜ao existe uma aplicac¸˜ao cont´ınua e sobrejetora α : T2 −→ T2 homot ´opica `a
identidade tal queα◦ f =φA◦α, ou como no diagrama comutativo:
T2 T2
T2 T2
/
/
f
α
/
/
α
/
/
φA
Sendo assim, φA ´e um fator de f e, como ´e bem sabido, possui dinˆamica bem
interessante. Em outras palavras,
• possui entropia topol ´ogica positiva, isto ´e,htop(φA) = log|λ|, ondeλ ´e o maior
autovalor deA;
• possui ´orbitas densas, isto ´e,φA ´e transitiva;
• o conjunto dos pontos peri ´odicos deφA ´e denso emT2; e
• possui folheac¸ ˜oes invariantes transversais densas sobre T2, sendo que uma
delas expande e a outra contrai a dinˆamica.
J´a as aplicac¸ ˜oes induzidas por A n˜ao hiperb ´olicas, ou seja, o raio espectral de
1.1 Considerac¸ ˜oes Preliminares 6
Assim, uma quest˜ao natural ´e sob que condic¸ ˜oes (dinˆamicas, topol ´ogicas, etc) podemos garantir uma dinˆamica n˜ao trivial?
Homeomorfismos homot ´opicos `a Dehn twists.
A quest˜ao colocada anteriormente ser´a explorada para a classe dos homeomorfis-mos homot ´opicos `a Dehn twists, ou seja, querehomeomorfis-mos encontrar hip ´oteses topol ´ogicas e dinˆamicas simples que produzam uma dinˆamica complicada (rica) nessa classe.
O conjunto dos difeomorfismos twists (e tilts) do toro s˜ao exemplos particulares da classe Dehn twist e esses, como ´e bem sabido, possuem uma teoria muito impor-tante na ´area de sistemas dinˆamicos, bem como diversas aplicac¸ ˜oes em ´areas afins. Essa condic¸˜ao de torc¸˜ao aparece com frequˆencia em v´arias situac¸ ˜oes aparentemente n˜ao relacionadas. Por exemplo, o modelo de Frenkel-Kontorova, as geod´esicas no toro, as pertubac¸ ˜oes peri ´odicas de Hamiltonianos em dimens˜ao dois, as aplicac¸ ˜oes do tipo bilhar em curvas convexas, os Hamiltonianos com dois graus de liberdade, em particular no problema restrito de trˆes corpos, a dinˆamica numa vizinhanc¸a de um ponto el´ıptico. Portanto, a teoria dos difeomorfismos do tipo twist pode ser considerada como um modelo te ´orico unificador para v´arios fen ˆomenos. Veja [25], [23] e [24].
Sendo assim, estamos interessados e guiados por essa propriedade topol ´ogica de “entortar verticais ” de um Dehn twist. No caso, de aplicac¸ ˜oes twists (ou tilts) uma restric¸˜ao muito forte ´e imposta. E essa acarreta fortes restric¸ ˜oes na dinˆamica [14] e [2]. Desse modo, nosso interesse ´e o caso geral, ou seja, estudaremos somente os aspectos topol ´ogicos dessa propriedade, assim como suas imposic¸ ˜oes dinˆamicas.
1.1 Considerac¸ ˜oes Preliminares 7
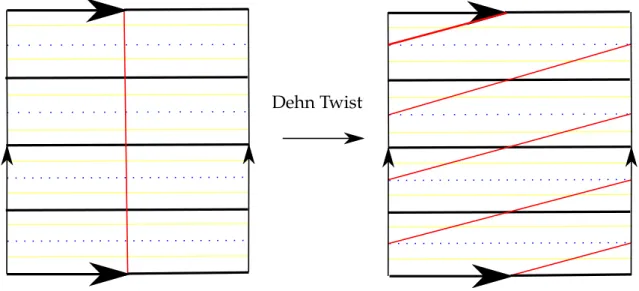
Dehn
Twist
corta cola
Figura 1.1: Ac¸˜ao de um Dehn twist
No caso do toro plano a dinˆamica de um Dehn twist ´e exemplificado na figura abaixo.
Dehn Twist
1.1 Considerac¸ ˜oes Preliminares 8
Este trabalho est´a organizado do seguinte modo:
Nas duas pr ´oximas sec¸ ˜oes, apresenta-se os objetivos e as contribuic¸ ˜oes desse estudo.
No cap´ıtulo 2, introduz-se a noc¸˜ao de conjunto de rotac¸˜ao para dinˆamicas de homeomorfismos homot ´opicos `a identidade e `a Dehn twist. Apresenta-se algumas implicac¸ ˜oes dinˆamicas fornecidas por essa teoria de rotac¸˜ao, e mostra-se que essas classes (identidadeversusDehn twist) possuem comportamentos diferentes.
No cap´ıtulo 3 (e em diante), estuda-se os homeomorfismos Dehn twists atrav´es de uma t´ecnica de compactificac¸˜ao da dinˆamica, adicionamos dois pontos fixos no infinito do recobrimento e analisamos o comportamento assint ´otico (o omega limite) de certos conjuntos a esses pontos. Demonstra-se que o omega limite de um conjunto espec´ıfico fornece informac¸ ˜oes sobre o conjunto de rotac¸˜ao (vertical) e, consequente-mente, restric¸ ˜oes na dinˆamica. Enuncia-se alguns importantes resultados da teoria de Brouwer para homeomorfismos do plano.
1.2 Objetivos 9
1.2
Objetivos
O objetivo desse trabalho ´e estudar no contexto das aplicac¸ ˜oes homot ´opicas `a Dehn twists algumas das muitas importantes conjecturas feitas para aplicac¸ ˜oes ho-mot ´opicas `a identidade. Como por exemplo, a conjectura de Boyland :
Suponha que f tenha fluxo zero (2.2.5) e que exista uma medida Boreleana de probabilidade f-invariante com n ´umero de rotac¸˜ao vertical positivo, ent˜ao ´e verdade que existe um ponto com n ´umero de rotac¸˜ao vertical negativo?
Outras quest ˜oes s˜ao: O conjunto dos Cr-difeomorfismos Dehn twists minimais
possui interior vazio parar≥2?
Se f ´e um homeomorfismo Dehn twist que preserva ´area e tem n ´umero de rotac¸˜ao vertical da medida de Lebesgue zero, ent˜ao ´e verdade que ou f ´e um homeomorfismo do anel, ou seu intervalo de rotac¸˜ao vertical possui interior n˜ao vazio?
Ou mais geral, se f ´e um homeomorfismo Dehn twist cujo conjunto de rotac¸˜ao vertical cont´em o zero, ent˜ao ´e verdade que ou f possui um anel invariante, ou seu intervalo de rotac¸˜ao vertical n˜ao se reduz s ´o ao zero?
1.3 Contribuic¸ ˜oes 10
1.3
Contribuic¸ ˜oes
Sejam f :T2−→T2um homeomorfismo homot ´opico a um Dehn twist e ˆf : S1×R −→
S1 ×R um levantamento de f para o cilindro vertical. Nessas condic¸ ˜oes, pode-se
provar que o conjunto de rotac¸ ˜ao vertical de fˆ´e degenerado azerose , e somente se, ˆf ´e um homeomorfismo doanel (ou seja, existem an´eis invariantes emS1×R),
veja a figura 1.3 abaixo. Reciprocamente, se zero pertence ao conjunto de rotac¸˜ao vertical de ˆf e as ´orbitas n ˜ao s ˜ao uniformemente limitadas na direc¸ ˜ao vertical, ent˜ao ˆf tem conjunto de rotac¸˜ao vertical cominterior n ˜ao vazio. E, nesse caso, veja 2.3, f tem entropia topol ´ogica positiva e infinitos pontos peri ´odicos com per´ıodos arbitrariamente grandes.
K K+(0,M)
K−(0,M)
ˆ
f(K
)=
K
ˆ
z
ˆ
f(ˆz)
ˆ
fn(ˆz)
ˆ
f2(ˆz)
Figura 1.3: Dinˆamica reduzida de ˆf ao anel
1.3 Contribuic¸ ˜oes 11
• Caso Conservativo
Este resultado responde positivamente a conjectura de Boyland (observe 1.2) para essa classe de homotopia.
Teorema 1.3.1. Sejam f ∈DT(T2) preservando ´area e um levantamento ˆf ∈DT(S1×
R) com fluxo zero. Se ρv( ˆf) n˜ao ´e degenerado a zero, zero ´e um ponto interior de
ρv( ˆf).
• Caso Geral
Teorema 1.3.2. Sejam f ∈ DT(T2) e um levantamento ˆf ∈ DT(S1 × R). Ent˜ao,
ρv( ˆf)={0}se, e somente se, existeKum continuum essencial invariante por ˆf.
Um conjunto K ⊂ S1 ×R ´e dito ser continuum se for compacto e conexo. E, ´e
essencialse separa os fins do cilindro.
O seguinte corol´ario ´e quase imediato do teorema anterior.
Corol´ario 1.3.3. Sejam f ∈ DT(T2) e um levantamento ˆf ∈ DT(S1 × R) tal que
ρv( ˆf) = [a,p/q] para algum racionalp/q e algum n ´umero reala ≤ p/q. Ent˜ao, existe M>0 tal que para todo ponto ˆz∈S1×R,
p2◦ fˆn(ˆz)−p2(ˆz)−np/q<M,
para todo inteiron>0.
O pr ´oximo importante corol´ario afirma, sob certas hip ´oteses extremamente simples, que deslocamento sublinear verticalimplica velocidade vertical. Isso ´e, de certo modo, uma vers˜ao mais fraca daconjectura de Boyland.
Corol´ario 1.3.4. Sejam f ∈ DT(T2) e um levantamento ˆf ∈ DT(S1 × R). Existe
Mf =M(f)>0 tal que se para ˆz1,zˆ2 ∈S1×Rocorrer
p2◦ fˆn1(ˆz1)−p2(ˆz1)>Mf
e
p2◦ fˆn2(ˆz2)−p2(ˆz2)<−Mf,
comn1,n2 ∈N∗, ent˜ao 0 ´e um ponto interior deρv( ˆf).
De fato, ´e poss´ıvel mostrar que, sob as hip ´oteses anteriores, se 0 ∈ ρv( ˆf) e, para algum ponto ˆz1 ∈S1×R,
p2◦ fˆn1(ˆz1)−p2(ˆz1)>Mf,
CAP´ITULO
2
FUNDAMENTOS
Neste cap´ıtulo definiremos um importante invariante topol ´ogico, o conjunto de rotac¸ ˜ao, que serve para medir o deslocamento m´edio de um ponto no recobrimento.
2.1
O Conjunto de Rotac¸˜ao
Sejamp: R2 −→T2 a aplicac¸˜ao de recobrimento can ˆonica do toro, definida por,
p( ˜x,y˜)=( ˜xmod 1,y˜ mod 1 )
e ˜f : R2 −→ R2 um levantamento de um homeomorfismo do toro homot ´opico `a
identidade f : T2 −→T2, isto ´e, ˜f ´e um homeomorfismo tal que o diagrama abaixo
´e comutativo
R2 R2
T2 T2
/
/
˜
f
p
/
/
p
/
/
f
Para todo (n1,n2)∈Z2,
˜
f(( ˜x,y˜)+(n1,n2))= f˜( ˜x,y˜)+(n1,n2).
Definic¸˜ao 2.1.1. Sejam f :T2−→T2um homeomorfismo homot ´opico `a identidade e ˜f um levantamento de f para o recobrimento universal.
2.1 O Conjunto de Rotac¸˜ao 13
1. Para cada ( ˜x,y˜)∈R2definimos o vetor de rotac¸˜ao de ( ˜x,y˜) com respeito a ˜f por
lim
n→∞ ˜
fn( ˜x,y˜)−( ˜x,y˜)
n (2.1)
quando o limite existir.
2. Definimos o conjunto de rotac¸˜ao de ˜f,ρ( ˜f), como sendo o conjunto dos pontos de acumulac¸˜ao do conjunto
( ˜
fk( ˜x,y˜)−( ˜x,y˜)
k : ( ˜x,y˜)∈R
2,k∈N∗
)
.
Equivalentemente,
ρ( ˜f)= \
n≥1
f echo [
k≥n
( ˜
fk( ˜x,y˜)−( ˜x,y˜)
k : ( ˜x,y˜)∈R
2 ) . (2.2)
Assim,v∈ρ( ˜f) se, e somente se, existem subsequˆencias{ni} ⊂Ne{zi˜} ⊂R2tais que
v=lim
i→∞ ˜
fni(˜zi)−(˜zi)
ni .
Essa definic¸˜ao se deve a Misiurewicz e Ziemian [18], e definido desse modo,ρ( ˜f) ´e sempre compacto e convexo (como no caso de endomorfismos do c´ırculo [26]).
O vetor de rotac¸˜ao ´e invariante por translac¸ ˜oes de vetores de coordenadas inteiras, logo faz sentido falar no n ´umero de rotac¸˜ao de (x,y) ∈ T2. Pelo mesmo motivo,
o conjunto de rotac¸˜ao pode ser definido usando somente pontos de um dom´ınio fundamental, que pode ser pensado como correspondendo ao toro original.
O objetivo ´e usar informac¸ ˜oes sobre os vetores de rotac¸˜ao e o conjunto de rotac¸˜ao para entender a dinˆamica de f (deduzir a existˆencia de pontos fixos, pontos peri ´odicos, etc.), ver [18] e [9]. Por exemplo, foi obtido por John Franks que, se o conjunto de rotac¸˜ao tiver interior, ent˜ao os pontos com coordenadas racionais s˜ao realizados por ´orbitas peri ´odicas, isto ´e, para todo (p0,q0) ∈ Z2 ×N∗ (primos entre
si) tal que p0/q0 ∈ int (ρ( ˜f)), existe um ponto peri ´odicoz ∈ T2 (de per´ıodo q0) que
quando levantado para o plano satisfaz, para todo ˜z∈p−1(z),
˜
fq0(˜z)=z˜+p
2.2 O Conjunto de Rotac¸˜ao Vertical 14
2.2
O Conjunto de Rotac¸˜ao Vertical
Consideremos agora a classe dos homeomorfismos homot ´opicos `a Dehn twists,
f : T2 −→ T2, isto ´e, tais que um levantamento de f para o plano, recobrimento universal do toro, ˜f :R2−→R2 ´e um homeomorfismo que, para todo (n
1,n2)∈Z2,
˜
f(( ˜x,y˜)+(n1,n2))= f˜( ˜x,y˜)+Lm(n1,n2),
onde,
Lm( ˜x,y˜)=( ˜x+my˜,y˜),
´e, para cadam∈ Z∗, uma transformac¸˜ao linear deR2.
A aplicac¸˜ao induzida no toro por Lm, φLm, ´e conhecida como Dehn twist. Vale observar que para cadam∈Z∗temos uma classe diferente de homotopia.
Denotemos por DT(T2) o conjunto de homeomorfismos do toro homot ´opico a
um Dehn twist
(x,y)7→φLm(x,y)=(x+mymod 1,ymod 1),
para algum m ∈ Z∗, e seja DT(R2) o conjunto dos levantamentos de elementos de
DT(T2) para o recobrimento universalR2.
Note que toda Lm deixa invariante a direc¸˜ao horizontal do plano, permitindo definir um n ´umero de rotac¸˜ao (vertical) que mede a velocidade m´edia (vertical) de um ponto ( ˜x,y˜) sobre a ac¸˜ao de um levantamento ˜f. Esse fato faz com que essa classe de homotopia seja mais simples, em um certo sentido, que a da identidade. Um modo de ver isso ´e supor que ˜f tem um ponto fixo, pois nesse caso, para algum ˜
z∈R2,
˜
f(˜z)=z˜
e, da definic¸˜ao de Dehn twist,
˜
f(˜z+(0,k))=z˜+(0,k)+(mk,0), ondek∈Z∗.
Sendo assim, n˜ao fica bem definido um vetor de rotac¸˜ao independente dep−1(p(˜z)).
Para precisar melhor considere a proposic¸˜ao (veja [1] e suponham>0):
Proposic¸˜ao 2.2.1. Sejamp1,2 :R2 −→Ras projec¸ ˜oes can ˆonicas na primeira e segunda
coordenadas de R2. Sejam f ∈ DT(T2) e ˜f ∈ DT(R2) tal que, para algum ˜z ∈ R2,
existeC>0 com|p2◦f˜n(˜z)|<C, para todon>0. Suponha ainda que existam ˜w+e ˜w− tais quep2◦ f˜n( ˜w±)−→ ±∞quandon−→ ∞.
2.2 O Conjunto de Rotac¸˜ao Vertical 15
p1◦ f˜n(˜z)−p1(˜z)
n
<K, para todon>0
e
p1◦ f˜n( ˜w±)−p1( ˜w±)
n −→ ±∞quandon−→ ∞.
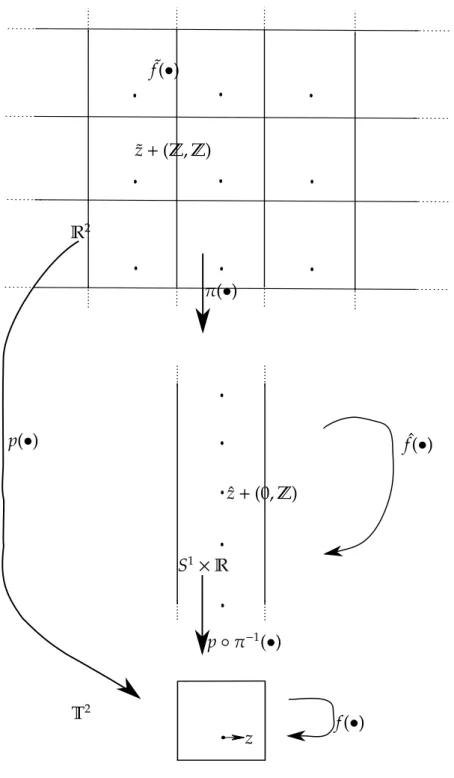
Assim, n˜ao faz sentido em definir um conjunto de rotac¸˜ao bidimensional para homeomorfismos do toro homot ´opico a um Dehn twist. Ao inv´es disso, definimos o conjunto de rotac¸˜ao vertical em outro recobrimento do toro, veja [3].
Sejaπ:R2 −→S1×Ra aplicac¸˜ao de recobrimento do cilindro,
π( ˜x,y˜)=( ˜xmod 1,y˜).
Denotemos porDT(S1×R) o conjunto dos levantamentos de elementos deDT(T2)
para o recobrimento S1 × R. Como usado na proposic¸˜ao anterior, denotemos as
projec¸ ˜oes can ˆonicas do cilindro tamb´em porp1 ep2e os homeomorfismos deDT(T2)
por f e seus levantamentos para o cilindro vertical e para o plano como ˆf e ˜f, respectivamente. A seguinte definic¸˜ao ´e dada em [2] e [7].
Definic¸˜ao 2.2.2. Sejam f ∈DT(T2) e um levantamento ˆf ∈DT(S1×R) fixado. Para
cada ˆz ∈ S1 × R definimos o n ´umero de rotac¸ ˜ao vertical de ˆz com respeito a ˆf,
denotado porρv(ˆz),
lim
n→∞
p2◦ fˆn(ˆz)−p2(ˆz)
n , (2.3)
quando o limite existir, ondep2 :S1×R−→R ´e a projec¸˜ao na coordenada vertical.
Com essa definic¸˜ao, podemos definir oconjunto de rotac¸ ˜ao vertical, an´alogo ao que foi feito para a classe de homeomorfismo homot ´opico `a identidade, digamos como o conjunto de pontos de acumulac¸˜ao de
p2◦ fˆn(ˆz)−p2(ˆz)
n : ˆz∈S
1×R,n∈N∗
.
Denotemos porρv( ˆf) o conjunto de rotac¸˜ao vertical de ˆf.
Observe que a restric¸˜ao para a segunda coordenada implica a importante pro-priedade, para todok∈Z,
2.2 O Conjunto de Rotac¸˜ao Vertical 16
onde ˆz∈S1×R. Portanto, a func¸˜aoρ
v(•) est´a tamb´em bem definida quando restrita
ao toro, ou seja, depende somente de z = p(π−1(ˆz)). Desse modo, podemos usar a
notac¸˜aoρv(z) para isso.
Em ambos os casos, o conjunto de rotac¸˜ao possui as mesmas propriedades do caso unidimensional no que diz respeito a dependˆencia do homeomorfismo no levantamento, em outras palavras:
Proposic¸˜ao 2.2.3. Sejam f ∈ DT(T2) e um levantamento ˆf ∈ DT(S1 ×R) fixado.
Ent˜ao, para todop∈Z∗eq∈N∗,
1. ρv( ˆfq−(0,p))=q.ρv( ˆf)−p;
2. ρv( ˆf−1)=−ρv( ˆf).
Para outras propriedades importantes veja [1],[7] e [8].
Vale notar que, fixado f e ˆf, podemos definir afunc¸ ˜ao deslocamentopor
△: T2 −→ R
z 7−→ △(z)p2◦ fˆ(ˆz)−p2(ˆz),
para qualquer ˆz∈π(p−1(z)).
Isso motiva a seguinte definic¸˜ao:
Definic¸˜ao 2.2.4. Sejaµuma medida Boreleana de probabilidade emT2, f-invariante,
ou seja, µ ∈ MT2(f). Definimos o n ´umero de rotac¸ ˜ao verticalde µ, denotada por
ρv(µ), da seguinte forma
ρv(µ)=
Z
T2
△(z)dµ. (2.4)
A importˆancia dessa definic¸˜ao ´e claramente ilustrada pelo teorema erg ´odico de Birkhoff, que diz que, paraµ-quase todo pontoz∈T2e para qualquer ˆz∈π(p−1(z)),
ρv(z)= lim n→∞
1
n n−1
X
i=0
△ ◦ fi(z)= lim
n→∞
p2◦ fˆn(ˆz)−p2(ˆz)
n , (2.5)
existe e
Z
T2
2.2 O Conjunto de Rotac¸˜ao Vertical 17
Al´em disso, se f for erg ´odica com respeito aµ, temos queρv(z) ´e constanteµ-quase
sempre. Nesse caso, paraµ-quase todo pontoz∈T2e para qualquer ˆz∈π(p−1(z)),
lim
n→∞
p2◦ fˆn(ˆz)−p2(ˆz)
n =ρv(µ).
Comoρv(•), definido em 2.4, ´e um funcional linear cont´ınuo eMT2(f) um conjunto
convexo e compacto (na topologia fraca⋆, ver [30]) temos que
ρv(MT2(f))=[a,b]⊂R
onde
a= min µ∈MT2(f)
ρv(µ) eb= max
µ∈MT2(f)
ρv(µ),
ou seja, o m´ınimo e o m´aximo de ρv(•) quando µ varia sobre todas as medidas
Boreleanas de probabilidade em T2, f-invariantes. Al´em disso, veja [3] e [8], para toda sequˆencia de pontos ˆzi ∈S1×Reni −→+∞(quandoi→+∞) tal que
lim
i→∞
p2◦ fˆni(ˆzi)−p2(ˆzi)
ni =v,
ent˜ao,v∈[a,b]. A rec´ıproca tamb´em ´e verdadeira, ou seja, [a,b]⊂ρv( ˆf). Portanto, ρv( ˆf)=ρv(MT2(f))=[a,b].
Definic¸˜ao 2.2.5. Diremos que um homeomorfismo f do toro tem fluxo zero se f
preserva ´area e satisfazρv(Leb)=0 para algum levantamento fixado ˆf.
Veja a figura abaixo.
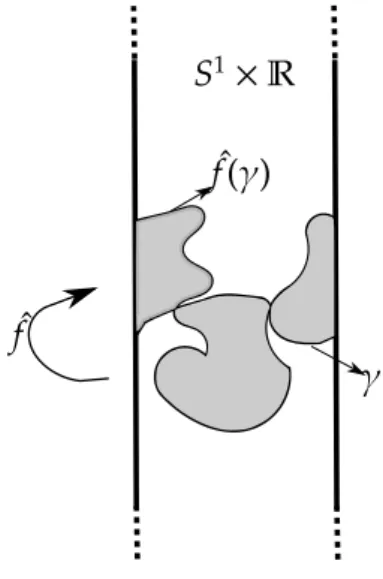
Nesse caso, se ˆf tem fluxo zero, temos o seguinte conceito geom´etrico, para todo
curva fechada simples homotopicamente n ˜ao trivial, γ : S1 −→ S1 ×R, a ´area da
regi˜ao acima deγ(S1) e abaixo de ˆf ◦γ(S1) ´e igual a ´area da regi˜ao acima de ˆf◦γ(S1)
e abaixo deγ(S1). Um resultado interessante que envolve essa definic¸˜ao aparece em
[3] e diz o seguinte, se ˆf tem fluxo zero, ent˜ao f tem ponto fixo (veja tamb´em [7]). De fato, o resultado de [3] ´e bem mais geral:
Teorema 2.2.6. Sejam f ∈ DT(T2) um levantamento ˆf ∈ DT(S1×R). Se f n˜ao tem
2.2 O Conjunto de Rotac¸˜ao Vertical 18
ˆ
f
S1×R
γ ˆ
f(γ)
Figura 2.1: Levantamento ˆf com fluxo zero
Homot ´opicos `a identidade Vs Dehn twists
O estudo da geometria desses conjuntos de rotac¸˜ao e suas implicac¸ ˜oes dinˆamicas formam uma ´area de pesquisa extremamente rica, atual e de grande interesse.
Um caso particularmente interessante ocorre quando estes conjuntos possuem interior vazio (no plano para homot ´opico `a identidade e na reta para Dehn twists). J´a uma das maiores dificuldades nessa teoria de rotac¸˜ao ´e saber se a existˆencia de deslocamento sub-linear implica deslocamento linear. Isso significa, por exemplo no caso Dehn twist, que se
sup
n∈N∗z∈T2
||
n−1
X
i=0
△(fi(z)) ||= sup
n∈N∗zˆ∈S1×R
|p2◦ fˆn(ˆz)−p2(ˆz)|= +∞,
ent˜ao,
ρv( ˆf),{0}.
Isso na classe da identidade n˜ao ocorre. Em um trabalho recente de F. Tal e A. Koropecki eles apresentam o seguinte teorema.
2.3 Implicac¸ ˜oes Dinˆamicas deρv(•) 19
Portanto, esse exemplo mostra que a existˆencia de deslocamento sub-linear n˜ao implica deslocamento linear, pelo menos no caso de homeomorfismos do toro ho-mot ´opico `a identidade. Desse modo, aplicac¸ ˜oes hoho-mot ´opicas a Dehn twists possuem comportamento bem diferente.
2.3
Implicac¸ ˜oes Dinˆamicas de
ρ
v(
•
)
Apresentaremos algumas das implicac¸ ˜oes do conjunto de rotac¸˜ao na classe de ho-meomorfismos Dehn twists. Para enunciados mais precisos e demonstrac¸ ˜oes veja [7] e [2]. Na classe de homeomorfismos homot ´opicos `a identidade veja [12].
O conjunto de rotac¸˜ao vertical de um homeomorfismo Dehn twist ´e um intervalo fechado (possivelmente um ponto, mas nunca vazio).
O pr ´oximo resultado afirma que se um homeomorfismo Dehn twist tem con-junto de rotac¸˜ao vertical com interior n˜ao vazio, ent˜ao esse possui complexidade dinˆamica “maior que” a de um pseudo-Anosov (veja [11] para algumas importantes propriedades dinˆamicas de um pseudo-Anosov).
Teorema 2.3.1. Sejam f ∈ DT(T2) e um levantamento ˆf ∈ DT(S1 ×R) tal que ρ
v( ˆf)
tenha interior n˜ao vazio. Ent˜ao, f ´e isot ´opico a uma aplicac¸˜ao pseudo-Anosov rela-tivo a um conjunto finito invariante. Consequentemente, f tem entropia topol ´ogica positiva.
Muito mais pode ser dito seρv( ˆf)=[a,b] coma<b. De fato,
• para todow∈]a,b[ existe um compacto, f-invarianteQwcom
ρv(z)= lim n−→+∞
1
n
X
0≤i≤n−1
△(fi(z))=w
para todoz∈Qw. Sew=p/q´e um n ´umero racional,Qp
q ´e uma ´orbita peri ´odica. • os extremos deρv( ˆf) s˜ao realizados por medidas de probabilidade erg ´odicas,
isto ´e, existem medidasµa eµberg ´odicas tais queρv(µa)=aeρv(µb)=b. Assim,
pelo teorema erg ´odico de Birkhoff, existem pontos za ezb tais que ρv(za) = aeρv(zb)=b.
2.3 Implicac¸ ˜oes Dinˆamicas deρv(•) 20
• em geral, n˜ao ´e verdade que os pontos extremais racionais do conjunto de rotac¸˜ao vertical s˜ao realizados por ´orbitas peri ´odicas (isso no caso homot ´opico `a identidade ´e falso).
2.3 Implicac¸ ˜oes Dinˆamicas deρv(•) 21
˜
z+(Z,Z)
π(•)
p(•) fˆ(•)
T2
z f(•)
˜
f(•)
R2
ˆ
z+(0,Z)
S1×R
p◦π−1(•)
CAP´ITULO
3
FERRAMENTAS B ´
ASICAS
Nessa sec¸˜ao apresentaremos a teoria desenvolvida em [5] e [4]. Basicamente, a t´ecnica ´e compactificar a dinˆamica no recobrimento e estudar adin ˆamica induzida nas vizinhanc¸as dos pontos no infinito.
3.1
Os conjuntos
B
−Se
B
+NPara estendermos as construc¸ ˜oes feita em [5] e [4] para nosso contexto, consideremos
f ∈DT(T2), um levantamento ˆf ∈DT(S1×R) e um levantamento de ˆf para o plano,
denotado por ˜f.
Definic¸˜ao 3.1.1. Para cada n ´umero reala, definamos os conjuntos
Ha =S1× {a}, H−a =S1×]−∞,a] eHa+=S1×[a,+∞[. Quandoa=0 escreveremos simplesmenteH,H−eH+.
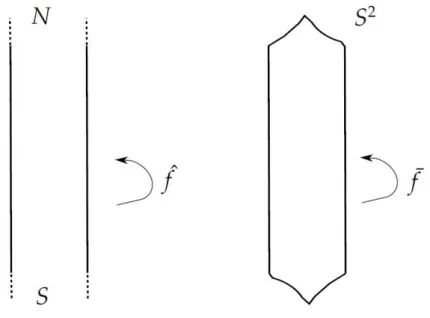
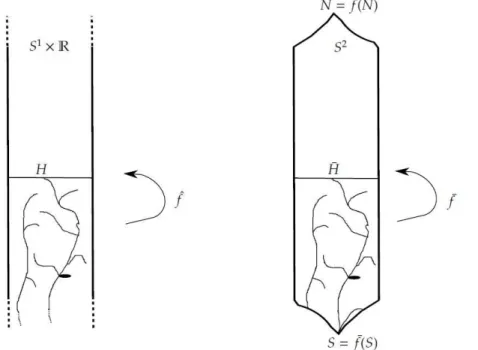
Consideremos a compactificac¸˜ao do cilindro vertical, S1 ×R, denotada por N,
S-compactificac¸˜ao, isto ´e, adicionamos dois pontosN(fim superior) eS(fim inferior) ao cilindro, obtendo a esfera topol ´ogica S2. Seja ¯f : S2 −→ S2 o homeomorfismo
induzido por ˆf : S1 ×R −→ S1×R. Ent˜ao, ¯f(N) = N e ¯f(S) = S (veja a figura 3.1
abaixo).
3.1 Os conjuntosB−S eB+
N 23
Figura 3.1: Dinˆamica na compactificac¸˜ao
Denotemos por ¯A, um conjunto deS2, se esse for correspondente do conjuntoA
no cilindro. Nessas condic¸ ˜oes, temos que os conjuntos fechados
¯
B− = \
n≤0 ¯
fn( ¯H−) (3.1)
e
¯
B+ = \
n≤0 ¯
fn( ¯H+), (3.2)
s˜ao ¯f-positivamente invariantes comS∈B¯−eN ∈B¯+. De fato, s˜ao fechados (e nunca
vazios) pois s˜ao intersec¸ ˜oes de conjuntos fechados da forma ¯f−n( ¯H±), comn≥0, que cont´em um dos pontos fixosN,S. Pelo c´alculo direto de ¯f( ¯B±),
¯
f( ¯H±∩f¯−1( ¯H±
)∩f¯−2( ¯H±
)∩...)= f¯( ¯H±)∩H¯±∩f¯−1( ¯H±
)∩f¯−2( ¯H±
)∩...= f¯( ¯H±)\B¯±⊂B¯±
temos que s˜ao positivamente invariantes.
Os conjuntos ¯B−
S e ¯B
+
N s˜ao, respectivamente, as componentes conexas de ¯B
− e
¯
B+ que cont´em S eN. Desse modo, B−
S e B
+
3.1 Os conjuntosB−S eB+
N 24
cilindro. Em outras palavras,
B−S = Uni˜ao das componentes conexas ilimitadas deB− = \
n≤0 ˆ
fn(H−)
e
B+N = Uni˜ao das componentes conexas ilimitadas deB+ = \
n≤0 ˆ
fn(H+).
Assim, esses conjuntos s˜ao sempre fechados e ˆf(B−
S) ⊂ B
−
S, ˆf(B
+
N) ⊂ B
+
N, mas
eventualmente vazios. Provaremos que, se o zero pertence ao conjunto de rotac¸˜ao vertical de ˆf, ent˜aoB−
S eB
+
N s˜ao n˜ao vazios.
Antes de enunciarmos precisamente esse teorema, consideremos os seguintes lemas intermedi´arios:
Lema 3.1.1. Suponha que 0 ∈ ρv( ˆf) e que para um dadoM > 0 existem um inteiro
positivo n e um ponto ˆz ∈ S1 ×[0,1] tal que p
2 ◦ fˆn(ˆz) > M. Ent˜ao B+N ∩ H , ∅
(equivalentemente paraS2, ¯B+N∩H¯ ,∅). Analogamente temos:
Lema 3.1.2. Suponha que 0 ∈ ρv( ˆf) e que para um dadoM > 0 existem um inteiro positivo n e um ponto ˆz ∈ S1 ×[0,1] tal que p
2◦ fˆn(ˆz) < −M. Ent˜ao B−S ∩H , ∅
(equivalentemente paraS2, ¯B−
S ∩H¯ ,∅).
A prova desses dois lemas ´e an´aloga e aparece em um contexto diferente em Le Calvez [13] e em Birkhoff[22]. Portanto, demonstraremos somente o ´ultimo.
Demonstrac¸˜ao. Primeiramente, observe que se para algum inteiroM >0, existir um inteiro positivon0tal que ˆfn0(H−) est´a contido emH−−M =H
−−(0,M), ou seja,
ˆ
fn0(H−)⊂H−
−M. (3.3)
Aplicando ˆfn0 em 3.3,
ˆ
f2n0(H−)⊂ fˆn0(H−−(0,M))= fˆn0(H−)−(0,M),
logo ˆf2n0(H−)⊂H−−(0,2M). Indutivamente,k∈N∗,
ˆ
3.1 Os conjuntosB−S eB+
N 25
Assim, para todo ponto ˆz ∈ H−, p
2 ◦ fˆkn0(ˆz) ≤ −kM. Mas, como H− cont´em um
dom´ınio fundamental, obtemos que para todo ponto ˆz∈S1×R,
p2◦ fˆkn0(ˆz)−p2(ˆz)≤ −kM.
Nessas condic¸ ˜oes,
p2◦ fˆkn0(ˆz)−p2(ˆz)≤ −kM
para todo ponto do cilindro e para todokinteiro positivo. Portanto,
lim sup
i→∞
p2◦ fˆi(ˆz)−p2(ˆz)
i ≤
−M n0
<0
para todo ˆz∈S1×R. O que ´e um absurdo, pois estamos supondo que 0∈ρ
v( ˆf).
Sendo assim, as hip ´oteses do lema implicam que para todo M > 0 existe um inteiro positivon=n(M), tal que
ˆ
fn(H)\H−M ,∅.
Claramente,Mentem a seguinte relac¸˜ao: tomandoMcada vez maior, necessitamos den(M) tamb´em maior para que ˆfn(M)(H)T
H− −M ,∅.
Desse modo, dadoN>0 existea≤ −2 tal que
n=inf{i>0 : ˆfi(H)∩Ha ,∅}>N.
Al´em disso, por definic¸˜ao de n, ˆfi(H) ⊂ H+
a para todo i ∈ {0,1, ...,n − 2,n − 1}.
Equivalentemente,
ˆ
f−i(Ha)⊂H− ∀i∈ {0,1, ...,n−2,n−1} e
ˆ
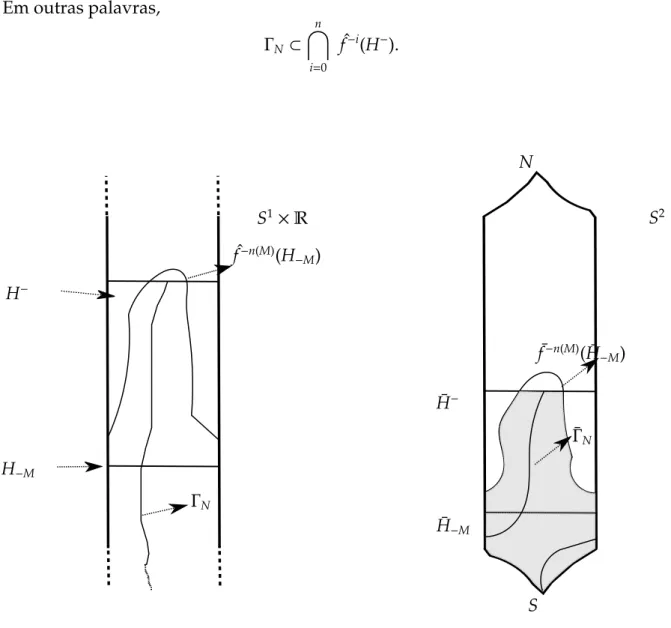
f−n(Ha)∩H,∅. Assim, existe um arco cont´ınuo simples
ΓN ⊂ fˆ−n(Ha−)∩H−
tal que ¯ΓN conectaS a ¯H (um fim de ¯ΓN ´e Se o outro est´a em ¯H). Veja a figura 3.2 abaixo.
Portanto, comoΓN ⊂ fˆ−n(H−
a)∩H−,
ˆ
3.1 Os conjuntosB−S eB+
N 26
Em outras palavras,
ΓN ⊂
n
\
i=0
ˆ
f−i(H−).
H−
H−M
¯
f−n(M)( ¯H
−M)
¯
ΓN
N
S
S2
¯
H− S1×R
¯
H−M
ΓN
ˆ
f−n(M)(H
−M)
Figura 3.2: Arcos cont´ınuos simplesΓN e ¯ΓN
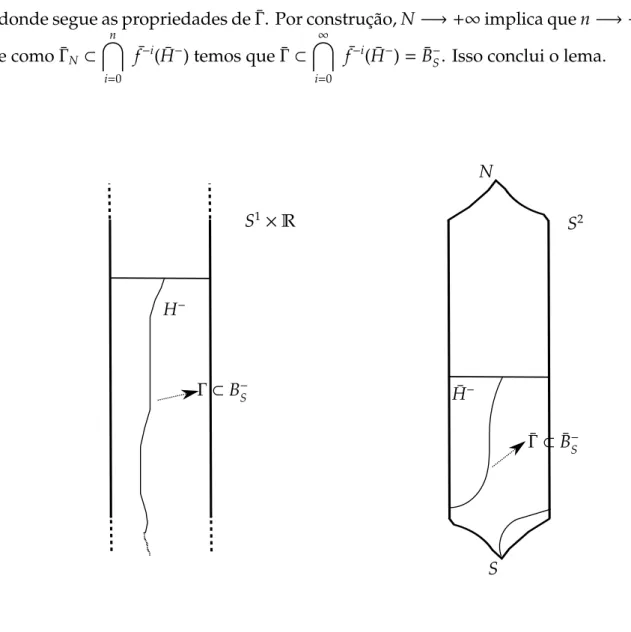
Na compactificac¸˜aoS2, temos uma sequˆencia{Γ¯
N}N>0de conjuntos compactos conexos,
logo existe um conjunto ¯Γcompacto, conexo e que conectaSaH, onde ¯Γ´e o limite de uma subsequˆencia convergente na topologia de Hausdorffde{Γ¯N}N>0, isto ´e, ¯ΓNi →Γ¯
quandoi→ ∞. Assim, dadoǫ >0, seVǫ( ¯Γ) eVǫ( ¯ΓNi) s˜aoǫ-vizinhanc¸as de ¯Γe de ¯ΓNi, existek>0 tal que
3.1 Os conjuntosB−S eB+
N 27
donde segue as propriedades de ¯Γ. Por construc¸˜ao,N−→+∞implica quen−→+∞
e como ¯ΓN ⊂
n
\
i=0
¯
f−i( ¯H−) temos que ¯Γ⊂ ∞
\
i=0
¯
f−i( ¯H−)=B¯−S. Isso conclui o lema.
N
S
S2
¯
H− S1×R
¯
Γ⊂B¯−
S
Γ⊂B−
S H−
Figura 3.3: B−
S e ¯B
−
S n˜ao vazios.
Esses lemas garantem que sob a hip ´otese extra de pontos com deslocamentos ilimitados em ambas as direc¸ ˜oes, isto ´e, f echo(S
n≥1 f¯n( ¯H)) ⊃ {S,N}implica queB−S e B+
N s˜ao n˜ao vazios. Mas, como dito anteriormente, a existˆencia desses conjuntos ´e
mais geral.
Teorema 3.1.2. Se 0 ∈ρv( ˆf), ent˜aoB−
S ,∅eB
+
3.1 Os conjuntosB−S eB+
N 28
Figura 3.4: Os conjuntosB−S e ¯B−S
Demonstrac¸˜ao. Suponha que para cada M > 1, existem inteiros positivos n− e n+ e
existem pontos ˆz−,zˆ+ ∈S1×[0,1] tais que
p2◦ fˆn
−
(ˆz−)−p2(ˆz−)<−Mep2◦ fˆn +
(ˆz+)−p2(ˆz+)>M.
Nesse caso, o lema 3.1.1 e o lema 3.1.2 implicam queB−
S eB
+
N s˜ao n˜ao vazios.
Suponha que a ´orbita de todo ponto seja uniformemente limitada no cilindro, isto ´e, existe um inteiroM0 >0 tal que
[
n∈Z ˆ
fn(S1×[0,1])⊂S1×[−M0,M0]. (3.4)
Considere o conjunto
O=[
n∈Z ˆ
fnS1×]− ∞,0[. Assim,O ´e aberto e invariante,
ˆ
f(O)= fˆ
[ n∈Z ˆ
fn(S1×]− ∞,0[
=[ n∈Z ˆ
fn(S1×]− ∞,0[=O.
Por 3.4, temos que o bordo deO´e um subconjunto deS1×]−∞,M0] e existeK, a ´unica componente de∂Oconexa, que separa os fins do cilindro e tal queK⊂S1×[−M
3.1 Os conjuntosB−S eB+
N 29
SendoOinvariante por ˆf, ˆf(K)=K.
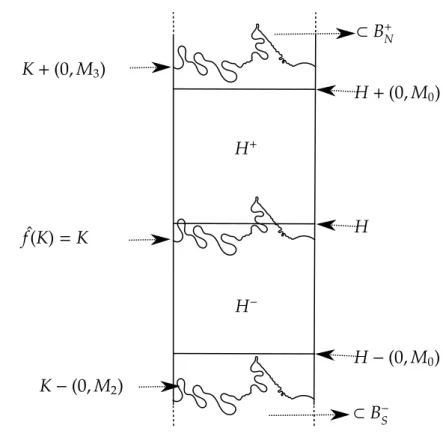
Portanto,K´e um compacto, conexo que separa os fins do cilindro ˆf-invariante. Desse modo, existe um transladado inteiro de K que est´a abaixo de H, ou seja, existe (o primeiro)M1≥0 tal que
K−(0,M1)⊂H−.
SendoK−(0,M1) ˆf-invariante, temos que a componente conexa do complementar de
K−(0,M1) que cont´em o fim inferior do cilindro tamb´em ´e ˆf-invariante e, portanto,
est´a contida emB−
S.
De um modo an´alogo, obtemos queB+
N ´e n˜ao vazio.
ˆ
f(K)=K K+(0,M3)
K−(0,M2)
H
H−(0,M0)
H+(0,M0)
⊂B−S
⊂B+
N
H−
H+
3.1 Os conjuntosB−S eB+
N 30
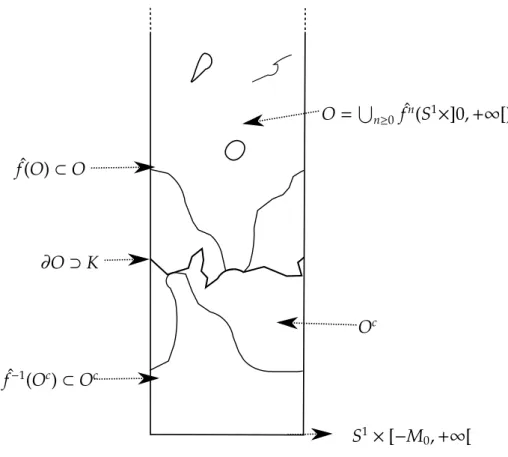
No pr ´oximo caso, vamos supor que existem ´orbitas ilimitadas em apenas uma direc¸˜ao. Em outras palavras, existeM0 >0 tal que
[
n>0
ˆ
fn(S1×[0,1])⊂S1×[−M0,+∞[,
ent˜ao existe um conjunto compacto conexoK ⊂ S1×R, tal queKsepara os fins do
cilindro eK ´e o bordo do conjunto aberto e conexo O = S
n≥0 fˆn(S1×]0,+∞[). Note
queOcont´em o fim superior do cilindro e ˆf(O)⊂O.
Oc O=S
n≥0 fˆn(S1×]0,+∞[)
ˆ
f(O)⊂O
ˆ
f−1(Oc)⊂Oc
S1×[−M 0,+∞[
∂O⊃K
Figura 3.6: ´Orbitas ilimitadas em apenas uma direc¸˜ao do cilindro
Se
\
n≥0
ˆ
3.2 Os conjuntosω-limite deB−S eB+
N. 31
ent˜ao 0<ρv( ˆf), pois, neste caso existiria um inteiroN1 >1 tal que ˆfN1(H)⊂H++(0,1).
Assim,
\
n≥0
ˆ
fn(f echo(O))
´e um subconjunto deOfechado, conexo, ilimitado e ˆf-invariante. Portanto,B+
N ´e n˜ao
vazio.
Como ˆf(O)⊂O, ˆf(Oc)⊃Oc, ou seja, ˆf−1(Oc)⊂Oc, desse modo, fazendo a mesma
construc¸˜ao paraOc, obtemos que
\
n≤0
ˆ
fn(Oc)
´e um subconjunto deOc fechado, conexo, ilimitado e ˆf-invariante. Donde vem que B−S ´e n˜ao vazio.
A ´ultima possibilidade pode ser tratada de um modo an´alogo.
3.2
Os conjuntos
ω-limite de
B
−Se
B
+N.
Nessa subsec¸˜ao examinaremos algumas propriedades do conjunto ω-limite de ¯B−
S,
denotado porω( ¯B−
S), e definido como segue:
ω( ¯B−S)= \
n≥0
f echo [
i≥n
¯
fi( ¯B−S)
. (3.5)
Como ¯f( ¯B−
S)⊂B¯
−
S e ¯B
−
S ´e fechado, temos
ω( ¯B−S)=
∞
\
n=0
¯
fn( ¯B−S).
Nessas condic¸ ˜oes,ω( ¯B−
S) ´e a intersecc¸˜ao de uma sequˆencia encaixante de compactos
conexos e, portanto, ´e um conjunto compacto conexo (possivelmente um ´unico ponto, mas nunca vazio). Veremos que, se o omega limite de ¯B−S ´e, somente, o ponto
S, ¯B−
S pode ser pensado como sendo o conjunto est´avel de S. Decorre da definic¸˜ao
3.5 acima o seguinte lema:
Lema 3.2.1. ω(B−S) ´e um conjunto fechado, ˆf-invariante, limitado superiormente (de fatoω(B−
S)⊂B
− ⊂H−
3.2 Os conjuntosω-limite deB−S eB+
N. 32
Demonstrac¸˜ao. As propriedades fechado, ˆf-invariante e limitado superiormente s˜ao consequˆencias imediatas da definic¸˜ao do conjunto. Com efeito, como ˆfn(B−
S) ´e
fechado para todo n ∈ N e ˆf(B−
S) ⊂ B
−
S ⊂ H
− temos que ω(B−
S) =
∞
\
n=0
ˆ
fn(B−S) ´e um subconjunto fechado deH−. O seguinte c´alculo fornece a prova da invariˆancia por ˆf. Sendo que ˆf(B−
S)⊂B
−
S,
ˆ
f(ω(B−S))= fˆ(∩∞n=0 fˆn(B−S))=∩∞n=1 fˆn(B−S)=∩∞n=1 fˆn(B−S)\B−S =ω(B−S). Como S ∈ B¯−
S e ¯f(S) = S, obtemos que S ∈ ω( ¯B
−
S). Assim, tendo que ω( ¯B
−
S) ´e
conexo, cada componente conexa deω(B−S) ´e ilimitada. Note que, comoB−
S ´e fechado e positivamente invariante por ˆf,ω(B
−
S)⊂B
−
S. Mas
ainda ´e poss´ıvel queω(B−
S) seja vazio. O pr ´oximo lema assegura que se esse ´e o caso
ent˜ao o conjunto de rotac¸˜ao vertical de ˆf n˜ao ser´a degenerado, ou seja,ρv( ˆf)=[a,b]
coma<b.
Lema 3.2.2. Suponha que 0 ∈ ρv( ˆf) (ent˜ao, B−
S ´e n˜ao vazio) e queω(B
−
S) = ∅. Ent˜ao,
ρv( ˆf)⊃[−ǫ,0], para algumǫ >0.
Demonstrac¸˜ao. Como 0 ∈ ρv( ˆf), temos, pelo teorema 3.1.2, que B−
S ´e n˜ao vazio. Por
definic¸˜ao, ˆf(B−
S)⊂B
−
S eω(B
−
S)=∩
∞
n=0 fˆ
n(B−
S). Por hip ´oteseω(B
−
S) ´e vazio.
Desse modo, se para todo inteiroN ≥0 existir um inteiron≥Ntal que
ˆ
fn(B−S)\H−(0,1),∅, ter´ıamos que
∀k∈ {0,1, ...,n}, fˆk(B−S)\H−(0,1),∅, pois, ˆfn(B−
S)⊂ fˆ k(B−
S), ∀k∈ {0,1, ...,n}.
Mas isso implica o absurdo, ∞
\
n=0
ˆ
fn(B−S)\H−(0,1),∅. Portanto, existe um inteiroN1>0 tal que para todon≥N1,
ˆ
fn(B−S)⊂H−−(0,1). (3.6) De fato, podemos provar que
ˆ
fN1(B−
S)⊂B
−
3.2 Os conjuntosω-limite deB−S eB+
N. 33
Suponha, por contradic¸˜ao, que
ˆ
fN1(B−
S)1B
−
S −(0,1).
Assim, existe um ponto ˆz∈B−
S tal que
ˆ
fN1(ˆz)<B−
S −(0,1).
Sejaγa componente conexa deB−
S que cont´em o ponto ˆz. Ent˜ao, por 3.6, ˆf
N1(γ)⊂H−
−1
e ˆfN1(γ)1B−
S−(0,1), ou seja,
ˆ
fN1(γ)+(0,1)1B−
S. (3.7)
Como ˆfN1(γ)+(0,1) ´e um subconjunto deH−conexo e ilimitado, deve existir um
inteiroN2 >0 tal que
ˆ
fN2( ˆfN1(γ)+(0,1))1H−,
pois vale 3.7. Equivalentemente,
ˆ
fN1+N2(γ)+(0,1)1H−,
isto ´e, ˆfN1+N2(γ)1H−−(0,1).O que ´e um absurdo, j´a que vale 3.6. Nessas condic¸ ˜oes,
ˆ
fN1(B−
S)⊂B
−
S −(0,1), para algumN1 >0.
Sendo assim, indutivamente em k ∈ N∗, ˆfkN1(B−
S) ⊂ B
−
S −(0,k) ⊂ H
−−(0,k), donde segue, para todo ˆz∈B−
S,
lim sup
n−→+∞
p2( ˆfn(ˆz))−p2(ˆz)
n ≤ −
1
N1
.
Note que, △(z) p2 ◦ fˆ(ˆz)−p2(ˆz) para qualquer ˆz ∈ π(p−1(z)) ´e uma func¸˜ao (bem
definida) cont´ınua deT2. SejaM> 0 um inteiro tal que| △(z)|<Mpara todo ponto
zdo toro. Definindo
△n(z)=
n−1
X
i=0
△(fi(z)),
temos que|△n(z)|<nM. Desse modo, uma vez que
△n(z)=△(z)+△(f(z))+...+△(fn−1(z))=p
2◦ fˆn(ˆz)−p2(ˆz),
p2( ˆfn(ˆz))−p2(ˆz)
n
3.2 Os conjuntosω-limite deB−S eB+
N. 34
Assim,
p2( ˆfn(ˆz))−p2(ˆz)
n
n∈N∗
⊂ [−M,M] ⊂ R tem uma subsequˆencia convergente. Por-tanto, se ˆz∈ B−
S, existeN1 ⊂Ntal que
ρv( ˆf)∋ lim
N1∋n−→+∞
p2( ˆfn(ˆz))−p2(ˆz)
n ≤ −
1
N1
.
Dessa feita, existeǫ > 0 tal queρv( ˆf)⊃[−ǫ,0].
Como foi dito antes, seω(B−
S)=∅ent˜aoB
−
S se comporta como se fosse o conjunto
est´avel do pontoS, pois para todo ponto ˆzdeB−
S,
lim
n−→+∞p2( ˆf
n(ˆz))−p
2(ˆz)=−∞.
O conjuntoBS foi definido como sendo o conjunto dos pontos que est˜ao abaixo da horizontal pelo zero,H, e que permanecem emH− por iteradas futuras de ˆf. J´a
B−
S ´e a uni˜ao de todas componentes conexas ilimitadas deBS. Denotemos porB
−
S(inv)
o an´alogo deB−
S para ˆf
−1.
O pr ´oximo lema estabelece uma relac¸˜ao entre esses conjuntos.
Lema 3.2.3. Os conjuntosω(B−S) eω(B−S(inv)) s˜ao iguais.
Demonstrac¸˜ao. Do lema 3.2.1,ω(B−
S) ´e invariante por ˆf. Assim,ω(B
−
S(inv)) ´e invariante
por ˆf−1(portanto, f-invariante). De fato, sendo
ω(B−S(inv))=
∞
\
n=0
ˆ
f−1n(B−S(inv))=B−S(inv)∩ fˆ−1(B−S(inv))∩ fˆ−2(B−S(inv))∩... e
B−S(inv) a uni˜ao das componentes conexas ilimitadas de
\
n≤0
ˆ
f−1n(H−)=H−∩ fˆ(H−)∩ fˆ2(H−)∩..., decorre que
ˆ
f−1(ω(B−S(inv)))=ω(B−S(inv)), pois ˆf−1(B−
S(inv))⊂B
−
S(inv). Mostremos que esses conjuntos ˆf-invariantes s˜ao iguais.
Considere uma componente conexa de ω(B−S), digamos Γ. Como ω(B−S) ´e um subconjunto deH−
e ´e (totalmente) invariante por ˆf, temos ˆf−i(Γ) ⊂ H−
3.2 Os conjuntosω-limite deB−S eB+
N. 35
i∈Z. Assim,Γ⊂T
i≥0 fˆi(H−) e ´e um conexo ilimitado, logoΓ⊂B−S(inv). Mas, (como
feito paraΓ) para todo inteiron ≥ 0, ˆfn(Γ) ´e uma componente conexa ilimitada de
T
i≥0 fˆi(H−), ent˜ao ˆfn(Γ)⊂B−S(inv), para todoninteiro positivo. Desse modo,
Γ⊂\
n≤0
ˆ
fn(B−S(inv))=ω(B−S(inv)).
Portanto,ω(B−
S)⊂ω(B
−
S(inv)). O mesmo racioc´ınio prova queω(B
−
S)⊃ω(B
−
S(inv)).
Tendo em mente esses resultados, podemos fornecer uma condic¸˜ao topol ´ogica para que um homeomorfismo Dehn twist tenha o zero como ponto interior do conjunto de rotac¸˜ao vertical de um levantamento fixado.
Teorema 3.2.1. Sejam f ∈DT(T2) e um levantamento ˆf ∈DT(S1×R) tal que 0∈ρ
v( ˆf)
e que o conjuntoω(B−S) seja vazio. Ent˜ao, zero ´e um ponto interior deρv( ˆf).
π
R× {0}
S1× {0}
ω(B−
S)
S1×R R2
π−1(ω(B−
S))=π
−1(ω(B−
S))+(0,1)
Figura 3.7: Levantamento deω(B−
3.2 Os conjuntosω-limite deB−S eB+
N. 36
Demonstrac¸˜ao. Do teorema 3.1.2 temos queB−
S eB
−
S(inv) s˜ao n˜ao vazios. Comoω(B
−
S)
´e vazio, o lema 3.2.3 implica que, ω(B−
S)(inv) = ∅. Nessas condic¸ ˜oes, aplicando o
lema 3.2.2 duas vezes, obtemos que existe umǫ >0 tal queρv( ˆf)⊃[−ǫ, ǫ].
Resultados an´alogos valem para
B+N, B+N(inv), ω(B+N) e ω(B+N(inv)).
Os seguintes lemas esclarecem um pouco sobre a estrutura topol ´ogica desses con-juntos quando levantados para o plano pela aplicac¸˜ao de recobrimento do cilindro π:R2 −→S1×R, veja a figura anterior.
Lema 3.2.4. Toda componente conexa ˜Γdeπ−1(ω(B−
S)) ´e ilimitada. Demonstrac¸˜ao. Seja ˜Γuma componente conexa deπ−1(ω(B−
S)). Suponha, por contradic¸˜ao,
que ˜Γ⊂interior(Q), ondeQ ´e uma bola compacta. Veja a seguinte figura.
S1×R R2
Γ
π
˜
Γ
Q
˜
p
π−1(ω(B−
S))
Figura 3.8: Levantamento deω(B−
S) (horizontal).
Considere um ponto ˜p ∈ Γ˜ e uma componente conexa de ω(B−
S), Γ, que cont´em p=π( ˜p). ´E claro que por definic¸˜ao deω(B−
S),Γ ´e ilimitado.
Denotemos por Viz1/n(Γ) a 1/n-vizinhanc¸a deΓ, onden ∈ N∗. Como Viz1/n(Γ) ´e
aberto e conexo, sejaγnum arco simples deViz1/n(Γ) comec¸ando empe terminando
3.2 Os conjuntosω-limite deB−S eB+
N. 37
S1×R R2
γn
π γ˜n
Q
˜
p
ˆ
p
Γ
γn,N0 −→γ
∂Q interiorQ
˜
p
Figura 3.9: Levantamento dos arcos cont´ınuos simples.
Seja ˜γnum levantamento deγnque cont´em ˜p. ComoQ ´e limitado, existeN0 >1 tal
que, para todo inteiron≥N0,
˜ γn
\
∂Q,∅.
Seja ˜γn,N0a componente conexa de ˜γn
T
Qque cont´em ˜p. Tomando uma subsequˆencia convergente (na topologia de Hausdorff) de{γ˜n,N0}n∈N, temos que existeN1 ⊂Ntal
que{γ˜n,N0}n∈N1 converge para um conjunto ˜γ compacto e conexo. Isto ´e, dadoǫ > 0
existeN1>0 tal que para todoN1 ∋n≥N1
˜