UNIVERSIDADE DE TR ´
AS-OS-MONTES E ALTO DOURO
CARACTERIZAC
¸ ˜
AO DE PROPRIEDADES EL ´
ASTICAS DE
PAIN´
EIS MDF ATRAV´
ES DO M´
ETODO DAS GRELHAS
ESCOLA DE CI ˆENCIAS E TECNOLOGIA
DISSERTAC¸ ˜AO DE MESTRADO EM ENGENHARIA MEC ˆANICA
JOAQUIM DIOGO DA SILVA PINTO DE MOURA
Disserta¸c˜ao apresentada `a Universidade Tr´as-os-Montes e Alto Douro para obten¸c˜ao do grau de Mestre em Engenharia Mecˆanica, realizada sob orienta¸c˜ao cient´ıfica do Dr. Jos´e Manuel Cardoso Xavier, do Centro de Investiga¸c˜ao e de Tecnologias Agro-ambientais e Biol´ogicas (CITAB) e co-orienta¸c˜ao do Professor Doutor Jos´e Joaquim Lopes Morais, do Departamento de Engenharias da Escola de Ciˆencias e Tecnologia da Universidade de Tr´as-os-Montes e Alto Douro.
“I am not young enough to know everything.” Oscar Wilde
Agradecimentos
Ao Doutor Jos´e Manuel Cardoso Xavier, meu orientador, pela ajuda, disponibilidade,
dedica¸c˜ao e paciˆencia que teve comigo, na elabora¸c˜ao deste trabalho.
Ao Professor Doutor Jos´e Joaquim Lopes Morais, meu Co-orientador, pela disponibilidade
e ajuda na elabora¸c˜ao deste trabalho.
Ao Eng. Crist´ov˜ao Santos pela ajuda prestada na prepara¸c˜ao do dispositivo criado para
os ensaios de flex˜ao.
Aos meus pais, Fernando e Clara, que sempre me incentivaram e apoiaram nos meus
estudos e na realiza¸c˜ao deste documento.
Ao meu irm˜ao Fernando pelo apoio, incentivo e amizade.
`
A Marta Pinto. `
A UTAD, Universidade de Tr´as-os-Montes e Alto Douro, por ter possibilitado as condi¸c˜oes
necess´arias `a cria¸c˜ao deste trabalho.
Resumo
Neste trabalho ´e apresentado um estudo de caracteriza¸c˜ao mecˆanica das propriedades
el´asticas de pain´eis de fibra de m´edia densidade (MDF) a partir de ensaios de flex˜ao
heterog´eneos. Esta abordagem ´e baseada no m´etodo dos campos virtuais acopulado a
medi¸c˜oes de campo obtidas pela t´ecnica de deflectometria (i.e., t´ecnica das grelhas por
reflex˜ao). Est´a t´ecnica ´otica mede o campo das rota¸c˜oes gerado na superf´ıcie externa
de uma placa submetida a flex˜ao. Os campos de curvatura da placa deformada foram
reconstru´ıdos por diferencia¸c˜ao num´erica a partir dos campos de rota¸c˜oes. O m´etodo dos
campos virtuais foi ent˜ao usado para a identifica¸c˜ao das componentes de rigidez `a flex˜ao
assumindo a teoria da flex˜ao de placas de Love-Kirchhoff. As placas MDF ensaiadas eram
constitu´ıdas de uma mistura de fibras de eucalipto e part´ıculas recicladas de cana de
a¸c´ucar, representando um novo produto que carece de caracteriza¸c˜ao f´ısica e mecˆanica.
As propriedades el´asticas obtidas utilizando o m´etodo de identifica¸c˜ao proposto neste
tra-balho (i.e. identifica¸c˜ao simultˆanea do m´odulo de elasticidade, coeficiente de Poisson e
m´odulo de corte) foram comparados com valores determinados atrav´es de ensaios
conven-cionais de flex˜ao em trˆes pontos e referidos na literatura. Os valores obtidos comparam
relativamente bem com estes ´ultimos.
Keywords
Pain´eis de fibra de m´edia densidade, Deflectometria, M´etodo dos campos virtuais
Abstract
This thesis deals with the characterisation of bending stiffness components of medium den-sity fibreboard (MDF) from a plate bending test. The approach is based on the virtual fields method coupled with full-field slope measurements provided by the deflectometry technique. MDF panels consisting of different fractions of Eucalyptus fibres and sugar-cane bagasse particles were used. The slope fields generated across the plate surface were measured by deflectometry. The curvature fields of the deformed plate were then recons-tructed by numerical differentiation. The virtual fields method was then implemented for material parameter identification under the framework of Kirchhoff-Love plate bending theory. The elastic properties obtained from the proposed data reduction (i.e., simul-taneous identification of modulus of elasticity, Poisson’s ratio and shear modulus) were compared with values determined from classical three-point bending tests and reported in the literature. The set of properties were found in relatively good agreement.
Keywords
Medium density fibreboard, Deflectometry, Virtual fields method
´Indice
Agradecimentos vii Resumo ix Abstract xi ´Indice xiv Lista de Figuras xvLista de Tabelas xvii
Lista de Acr´onimos xix
1 Introdu¸c˜ao 1
2 Metodologia 5
2.1 Deflectometria . . . 5
2.1.1 Escolha do m´etodo . . . 5
2.1.2 Princ´ıpio . . . 6
2.1.3 Sensibilidade, resolu¸c˜ao e resolu¸c˜ao Espacial . . . 8
2.1.4 M´etodos de unwrapping da fase . . . 9
2.2 M´etodo dos campos virtuais aplicado `a flex˜ao de placas finas . . . 10
2.2.1 Escolha do m´etodo . . . 10
2.2.2 Princ´ıpio . . . 11
2.2.3 Escolha dos campos virtuais . . . 13
3 Trabalho Experimental 17 3.1 Material e provetes . . . 17
3.2 Medi¸c˜oes de campo: deflectometria . . . 17
3.2.1 Prepara¸c˜ao da superf´ıcie reflectora . . . 17
3.2.2 Sistema ´optico. . . 19 3.3 Ensaio mecˆanico de flex˜ao de placa . . . 21
4 Resultados e Discuss˜ao 23
4.1 Avalia¸c˜ao dos campos de rota¸c˜oes . . . 23 4.2 Reconstru¸c˜ao do campo das curvaturas . . . 24 4.3 Identifica¸c˜ao das componentes de rigidez `a flex˜ao . . . 26
5 Conclus˜oes e trabalho futuro 29
Referˆencia 30
6 Anexo A 35
Lista de Figuras
2 Metodologia
2.1 Representa¸c˜ao esquem´atica da t´ecnica ´otica de deflectometria. . . 7 2.2 Ensaio de flex˜ao de placa fina. . . 14
3.1 Placa MDF: (a) superf´ıcie natural, (b) superficie especular revestida com resina ep´oxida. . . 19
3 Trabalho Experimental
3.2 Ensaio de flex˜ao ´a placa acopulado com a t´ecnica da deflectometria: (a) sistema de fixa¸c˜ao da placa; (b) sistema de carregamento; (c) imagem da grelha; (d) sistema ´otico cˆamera-lente. . . 20
4.1 Campo de rota¸c˜oes: (a) θX(x, y), (b) θY(x, y) (F = 45.1 N; caso de
carre-gamento F(0,b/2)). . . 24
4 Resultados e Discuss˜ao
4.2 Varia¸c˜ao do desvio padr˜ao dos campos residuais obtidos pela subtra¸c˜ao dos campos de rota¸c˜oes medidas e aproximadas. . . 25 4.3 (Campos de curvatura: (a) Kxx (K1), (b) Kyy (K2), (c) Kxy (K6) (F =
45.1 N; caso de carregamento F(0,b/2)). . . 25 4.4 Avalia¸c˜ao dos parˆametros de rigidez `a flex˜ao duma placa MDF em fun¸c˜ao
da for¸ca aplicada. . . 26
Lista de Tabelas
2 Metodologia
2.1 Escolha dos campos virtuais. . . 15
3 Trabalho Experimental
3.1 Composition of MDF panels and treatments. . . 18 3.2 Componentes do sistema ´otico e parˆametros de medida. . . 21
4.1 Propriedades de rigidez `a flex˜ao das placas MDF determinados a partir de ensaios de flex˜ao de placa e ensaios cl´assicos de flex˜ao em 3 pontos. . . 28
Lista de Acr´
onimos
MDF Pain´eis de fibra de m´edia densidade (Medium
den-sity fibreboard)
MCV M´etodo dos campos virtuais
1
Introdu¸c˜
ao
A madeira ´e um material comp´osito biol´ogico formado durante o crescimento de uma
´
arvore, possuindo uma estrutura complexa e heterog´enea. Dada a abundˆancia de
recur-sos florestais, a madeira sempre desempenhou um papel importante como material de
engenharia, nomeadamente na constru¸c˜ao naval e civil. Nas ´ultimas d´ecadas surgiram
no mercado novos produtos de engenharia `a base da madeira designados por derivados
de madeira. Estes novos produtos justificam-se na medida em que, por um lado,
promo-vem a utiliza¸c˜ao mais racional da madeira maci¸ca (devido `a altera¸c˜oes dos recursos na
natureza e preocupa¸c˜oes em reciclar os res´ıduos inerentes aos processos de transforma¸c˜ao
da madeira) e, por outro lado, aumentar a eficiˆencia e competitividade em rela¸c˜ao a
ou-tros materiais de engenharia em aplica¸c˜oes estruturais. Entre os produtos derivados da
madeira, destacam-se, por exemplo, as placas de part´ıculas ou fibras de madeira ou o
laminado colado, que tˆem nos nossos dias um volume de mercado e um impacto
socio-econ´omico crescentes. Nomeadamente, os pain´eis MDF tˆem vindo a sofrer um aumento
de produ¸c˜ao, consequˆencia da inova¸c˜ao no mercado de acabamentos e do aumento da sua
procura. Efetivamente, tanto a madeira maci¸ca como os seus derivados s˜ao hoje materiais
de engenharia importantes devido `as seguintes raz˜oes: (1) as ´arvores s˜ao produzidas por
uma fonte de energia livre (o sol), sendo renov´aveis e recicl´aveis; (2) existem importantes
recursos e diversas esp´ecies florestais na terra; (3) a silvicultura e a transforma¸c˜ao da
ma-deira tˆem um custo relativamente baixo; (4) a madeira tem um bom r´acio rigidez/peso,
comparativamente a outros materiais. No entanto, para a utiliza¸c˜ao eficiente da madeira
e seus derivados em aplica¸c˜oes de engenharia, as suas propriedades mecˆanicas, que
carac-terizam o seu comportamento a solicita¸c˜oes exteriores atrav´es de leis de comportamento,
necessitam de ser devidamente determinadas atrav´es de ensaios mecˆanicos adequados.
Neste trabalho pretende-se estudar o comportamento el´astico de pain´eis MDF (Medium
Density Fiberboard). Os pain´eis MDF s˜ao fabricados atrav´es da aglutina¸c˜ao de fibras
da madeira com resinas sint´eticas e outros aditivos. Estes materiais foram desenvolvidos
para preencher algumas lacunas estruturais, para al´em de permitirem uma melhor gest˜ao
dos recursos naturais das florestas. Neste estudo foram utilizados pain´eis MDF compostos
de fibras de eucalipto e part´ıculas recicladas de cana de a¸c´ucar. Este produto ´e proposto e
fabricado por empresa Brasileira. O desenvolvimento deste tipo de painel vem no sentido
de uma pol´ıtica de preserva¸c˜ao e gest˜ao dos recursos naturais dispon´ıveis, com a proposta
de fontes alternativas de fibras de lignocelulose no processo de fabrica¸c˜ao de MDF. Este
MDF representa em certa medida um novo produto que carece de caracteriza¸c˜ao f´ısica
e mecˆanica. Contudo, o ensaio de flex˜ao em trˆes pontos normalizado para este tipo de
material apenas permite a determina¸c˜ao do m´odulo de elasticidade e tens˜ao de ruptura `a
flex˜ao (EN 310,1993).
Actualmente as t´ecnicas ´oticas de medi¸c˜ao de campos de deslocamento ou deforma¸c˜ao
est˜ao a ser utilizados de forma crescente em mecˆanica experimental (Gr´ediac, 2004).
De acordo com os fen´omenos f´ısicos envolvidos nestas medi¸c˜oes, estes m´etodos podem
dividir-se em t´ecnicas de luz branca (e.g., correla¸c˜ao digital de imagem e m´etodo das
grelhas), e t´ecnicas interferom´etricas (e.g., feixe de Moir´e, shearografia de Moir´e, feixe
interferom´etrico e shearografia interferom´etrica). Seguindo o desenvolvimento destas
t´ecnicas ´oticas, novos m´etodos de identifica¸c˜ao tˆem sido propostos para a caracteriza¸c˜ao
de parˆametros materiais baseados de informa¸c˜ao de campo (Avril et al., 2008). Esta
abordagem oferece v´arias vantagens sobre a formula¸c˜ao cl´assica, tais como a identifica¸c˜ao
de m´ultiplos parˆametros constitutivos numa ´unica configura¸c˜ao de ensaio.
Neste trabalho ´e proposto um ensaio de flex˜ao de placa para a identifica¸c˜ao de todas
as componentes de rigidez `a flex˜ao do painel MDF. O m´etodo de ensaio consiste em
fixar a placa em v´arios pontos e aplicar uma carga pontual em um determinado local
no interior da placa. Nesta configura¸c˜ao ser˜ao gerados campos de rota¸c˜ao heterog´eneos,
que podem ser medidos experimentalmente utilizando a t´ecnica de deflectometria (Surrel,
2004). Esta t´ecnica requer que a superf´ıcie de interesse da placa tenha caracter´ısticas
reflectoras. Contudo, ´e uma t´ecnica adequada destacando-se a boa rela¸c˜ao resolu¸c˜ao
espacial (controlada pelo passo da grelha) e resolu¸c˜ao (∼ 10−5 µm/m). Os campos de
curvatura da placa podem ser reconstru´ıdos posteriormente por diferencia¸c˜ao num´erica.
Por ´ultimo, o m´etodo campos virtuais ´e implementado para a identifica¸c˜ao de parˆametros
materiais assumindo a teoria das placas finas de Kirchhoff-Love (Gr´ediac et al., 2003).
Este ´e um m´etodo de identifica¸c˜ao inversa no qual todo um conjunto de parˆametros
material ativo no ensaio pode ser determinado a partir de medi¸c˜oes de campo.
2
Metodologia
2.1
Deflectometria
2.1.1
Escolha do m´
etodo
No modelo mecˆanico de flex˜ao de uma placa, o comportamento do material ´e descrito a
partir das componentes de rigidez `a flex˜ao que relacionam os momentos flectores aplicados
com a curvatura da placa. Neste caso, por forma a resolver o problema inverso de
caracte-riza¸c˜ao dos parˆametros constitutivos, torna-se necess´ario medir experimentalmente quer as
for¸cas aplicadas a uma placa de geometria conhecida, quer a curvatura heterog´enea sofrida
pela placa. De acordo com a teoria cl´assica de placa finas (teoria de Love-Kirchhoff), a
deforma¸c˜ao de uma placa pode ser completamente descrita pela deflex˜ao da sua superf´ıcie
m´edia. Neste caso, a curvatura pode ser determinada das seguintes formas: (1) pela
se-gunda derivada parcial da deflex˜ao; (2) pela primeira derivada do rota¸c˜ao (declive). O
campo de deslocamentos fora do plano pode ser medido usando t´ecnicas de luz branca
como a estereovis˜ao (Xavier et al., 2012a) ou t´ecnicas interferom´etricas tais como o ESPI
(do Inglˆes Electron Speckle Pattern Interferometer) (M¨uller et al., 2005). Vale a pena
referir que os deslocamentos no plano tamb´em podem ser medidos usando estas t´ecnicas,
mas no caso da flex˜ao estas tˆem uma amplitude de ordem inferior, o que as torna dif´ıceis
de medir experimentalmente. Os grupos de t´ecnicas referidos diferem entre si quer no
apa-rato experimental quer na resolu¸c˜ao e sensibilidade. Contudo, a principal desvantagem
destas escolhas reside na necessidade de se derivar numericamente duas vezes o desloca-mento fora do plano, pois este processo amplifica significativamente o ru´ıdo experimental.
Por forma a contornar esta limita¸c˜ao, o campo de rota¸c˜oes pode ser medido directamente
experimentalmente recorrendo `a t´ecnica da deflectometria (m´etodo da grelha reflectida)
(Surrel,2004). Desta forma o campo de curvatura necess´ario no problema de identifica¸c˜ao
ser´a reconstru´ıdo apenas por uma deriva¸c˜ao num´erica. De seguida apresentar-se-´a uma
breve descri¸c˜ao do princ´ıpio da deflectometria.
2.1.2
Princ´ıpio
O princ´ıpio da t´ecnica ´otica de deflectometria est´a ilustrado na Figura 2.1. Pode-se
dis-tinguir neste esquema trˆes partes distintas: (1) uma placa fixa verticalmente ´e submetida
a um momento flector externo; (2) uma grelha convenientemente alinhada ´e posicionada
frente `a placa a uma distˆancia D; (3) um sistema ´otico cˆamara-lente ´e posicionado por
detr´as de um pequeno buraco feito no centro da grelha, registando o seu padr˜ao por
reflex˜ao na superf´ıcie da placa. O princ´ıpio da deflectometria baseia-se na lei de Snell
aplicada ´a luz de reflex˜ao especular. Esta t´ecnica baseia-se na deforma¸c˜ao geom´etrica da
imagem da grelha reflectida na superf´ıcie do provete. Por conseguinte, ´e necess´ario que a
superf´ıcie da placa tenha uma reflex˜ao especular suficiente de tal modo que a imagem da
grelha possa ser formada com contraste e retilinearidade adequados. A grelha ´e definida
por um padr˜ao peri´odico de linhas escuras e claras, caracterizada por um vector frequˆencia
espacial F (linhas/mm), ortogonal `as linhas da grelha e com amplitude igual ao inverso do
passo da grelha (p). Uma grelha cruzada (i.e. de linhas horizontais e verticais) pode ser
usada para a obten¸c˜ao em simultˆaneo das duas componentes do deslocamento (rota¸c˜ao).
A imagem de uma grelha pode ser matematicamente descrita por
I(x1, x2) = I0(x1, x2){1 + γ(x1, x2)f [2πF.R(x1, x2)]} (2.1)
onde I0(x1, x2) ´e a intensidade m´edia local, γ(x1, x2)∈ [0, 1] ´e o contraste local da grelha,
f representa uma fun¸c˜ao cont´ınua peri´odica que descreve o padr˜ao de intensidade da luz
na grelha e cujo argumento ´e a fase ´otica, ϕ(x1, x2) = 2πF.R(x1, x2), em que R(x1, x2) ´e
o vector posi¸c˜ao de um determinado pixel na imagem.
Um m´etodo de c´alculo de fase ´e usado para determinar o campo de fase a partir do
Figura 2.1 – Representa¸c˜ao esquem´atica da t´ecnica ´otica de deflectometria.
campo de intensidade de luz na imagem (Equa¸c˜ao 2.1), que define em cada instante
(for¸ca aplicada) a posi¸c˜ao geom´etrica da grelha. Geralmente ´e registado pelo menos
um par de imagem, antes (i) e ap´os (f ). ´E poss´ıvel mostrar que a diferen¸ca de fase,
∆ϕ(x1, x2) = ϕf(x1, x2)− ϕi(x1, x2), ´e proporcional ao deslocamento virtual da imagem
da grelha (u), observados entre dois estados mecˆanicos, de acordo com a seguinte rela¸c˜ao
∆ϕβ(x1, x2) =
2π
p uβ(x1, x2) (2.2)
onde β = 1 or 2, respectivamente, para a componente horizontal (linhas verticais) ou vertical (linhas horizontais) do deslocamento.
Considere-se um ponto P na placa, cuja intensidade de luz ´e registada no pixel O do
sensor da cˆamara digital. Assumindo reflex˜ao especular, em repouso o ponto P reflectir´a
a intensidade de luz proveniente do ponto M da grelha (Figura 2.1). Contudo, ap´os
solicita¸c˜ao de um momento flector na placa, o mesmo ponto P ir´a reflectir uma intensidade
de luz proveniente de um ponto visiono, o ponto N . Desta forma, no plano do sensor da
cˆamara digital a rota¸c˜ao local da placa ser´a interpretada como um deslocamento aparente
da grelha, vista por reflex˜ao sobre a superf´ıcie da placa.
2.1.3
Sensibilidade, resolu¸
c˜
ao e resolu¸
c˜
ao Espacial
A sensibilidade (s) ´e definida pelo quociente entre a varia¸c˜ao em fase (resposta do sistema
de medida) e a varia¸c˜ao de declive (estimulo). Para a t´ecnica de deflectometria este termo
´ e dado por s = ∂ϕ ∂α = 4πD p . (2.3)
Da Equa¸c˜ao (2.3) compreende-se que a sensibilidade desta t´ecnica pode ser
convenien-temente ajustada quer pela escolha da distˆancia de trabalho (D) quer pelo per´ıodo da
grelha (p).
A resolu¸c˜ao ´e definida como o mais pequeno valor do mesurando detect´avel pelo sistema
de medida. A resolu¸c˜ao em fase pode ser globalmente caracterizada como o desvio padr˜ao
do n´ıvel de ru´ıdo presente nas medi¸c˜oes experimentais. Este ru´ıdo pode ter v´arias origens
como na forma¸c˜ao da imagem (distor¸c˜oes introduzidas nas lentes do sistema ´otico) ou
na aquisi¸c˜ao digital de imagem (ru´ıdo t´ermico e electr´onico da cˆamara digital...). Na
pr´atica, uma forma expedida de quantificar a resolu¸c˜ao ´e atrav´es da subtra¸c˜ao de duas
medidas sucessivas e independentes correspondentes a um objecto est´atico: m1(x, y) =
s1(x, y) + r1(x, y) e m2(x, y) = s2(x, y) + r2(x, y), em que si(x, y) representa o verdadeiro
valor do sinal e ri(x, y) ´e o n´ıvel de ru´ıdo, com i = 1, 2 para a primeira e segunda aquisi¸c˜ao
de imagem, respectivamente. O sinal resultante desta subtra¸c˜ao ser´a dado por
∆m(x, y) = r2(x, y)− r1(x, y) (2.4)
Desta forma, o desvio padr˜ao do sinal de ru´ıdo em fase (σϕ) pode ser determinado em
fun¸c˜ao do desvio padr˜ao do sinal obtido pela diferen¸ca de fase entre duas medi¸c˜oes
inde-pendentes (σ∆ϕ) pela raz˜ao
σϕ=
σ√∆ϕ
2. (2.5)
A resolu¸c˜ao em rota¸c˜ao (σα) poder´a posteriormente ser avaliada tendo em conta a
sensi-bilidade do sistema ´otico por
σα =
σϕ
s . (2.6)
A resolu¸c˜ao espacial ´e definida como sendo a menor distˆancia separando duas medidas
independentes. No t´ecnica de deflectometria esta corresponde aproximadamente ao passo
da grelha no plano objecto (superf´ıcie da placa em estudo): ∆x = p/2. De notar que o
p´os-tratamento do campo de rota¸c˜ao, por exemplo, atrav´es de um processo de filtragem
por convolu¸c˜ao, embora possa atenuar o n´ıvel de ru´ıdo (resolu¸c˜ao) ir´a alterar (degradar)
a resolu¸c˜ao espacial das medi¸c˜oes.
2.1.4
M´
etodos de unwrapping da fase
O mapa de diferen¸ca de fase, obtido entre dois estados mecˆanicos distintos, ´e definido
no intervalo [−π, π]. Desta forma, o campo de fase pode apresentar descontinuidades
caracterizadas por saldos 2π. Para a reconstru¸c˜ao do campo cont´ınuo ´e necess´ario remover
estas descontinuidades recorrendo a m´etodos de unwrapping da fase. Estes algoritmos
podem ser divididos em duas categorias (Ghiglia and Pritt, 1998; Lopes, 2007): m´etodos
selectivos do caminho (path-following methods) e m´etodos da minimiza¸c˜ao da norma do
erro (mininum-norm methods).
No caso de campos de fase bi-dimensionais, a fase unwrapping (∆ϕ) ´e proporcional `a fase
wrapping (∆ψ) atrav´es da seguinte rela¸c˜ao linear (Ghiglia and Pritt,1998)
∆ϕ(x1, x2) = ∆ψ(x1, x2) + 2kπ, k ∈ Z. (2.7)
Normalmente a resolu¸c˜ao da Eq. (2.7) coloca algumas dificuldades sobretudo se as medi¸c˜oes
de fase forem acompanhadas com n´ıveis de ru´ıdo importante ou existir localmente falta de
informa¸c˜ao (Lopes,2007). Desta forma, o m´etodo de unwrapping da fase deve apresentar
baixa sensibilidade `a propaga¸c˜ao de erros (ru´ıdo). Neste trabalho utilizou-se o m´etodo
de unwrapping de Goldstein (Goldstein et al., 1988; Xavier et al., 2012b). Neste m´etodo
as descontinuidades ao longo do campo de fase s˜ao removidas adicionando ou subtraindo
m´ultiplos de 2π. Concretamente, ao longo de cada linha da imagem, se a diferen¸ca de
fase entre pix´eis consecutivos for superior a π ou −π, todos os restantes pix´eis da linha
s˜ao alterados, adicionado ou subtraindo 2π.
2.2
M´
etodo dos campos virtuais aplicado `
a flex˜
ao de
placas finas
2.2.1
Escolha do m´
etodo
Os parˆametros que regem as equa¸c˜oes constitutivas s˜ao determinados experimentalmente
atrav´es de ensaios mecˆanicos adequados. No ˆambito da mecˆanica dos s´olidos
experi-mental, este problema ´e dito inverso e consiste em determinar os parˆametros materiais
a partir do conhecimento da geometria do provete, das condi¸c˜oes de fronteira e da
res-posta cinem´atica (deforma¸c˜ao). Convencionalmente, esta identifica¸c˜ao ´e feita atrav´es de
ensaios mecˆanicos para os quais se assume v´alida a hip´otese de um estado homog´eneo
de deforma¸c˜ao/tens˜ao na regi˜ao de interesse. Contudo, esta condi¸c˜ao ´e dif´ıcil de
garan-tir na pr´atica sobretudo para materiais anisotr´opicos e heterog´eneos como ´e o caso da
madeira por exemplo. Recentemente, no sentido de ultrapassar esta limita¸c˜ao, novos
m´etodos de identifica¸c˜ao foram propostos copulando ensaios para os quais o campo de
deforma¸c˜ao/tens˜ao ´e suposto heterog´eneo (i.e., combinando simultaneamente v´arias
for-mas de carregamento elementar como trac¸c˜ao, compress˜ao, corte...) com t´ecnicas ´oticas
de campo (Avril et al., 2008). De entre estes m´etodos, o mais utilizado na literatura ´e
o m´etodo baseado no m´etodo dos elementos finitos (finite element model updating). O
princ´ıpio deste m´etodo consiste em construir um modelo de elementos finitos do ensaio
mecˆanico em an´alise usando informa¸c˜ao da geometria e condi¸c˜oes de fronteira. Uma
estimativa das propriedades mecˆanica do material ´e inicialmente usada para resolver o
problema directo de determina¸c˜ao do campo cinem´atico e de tens˜oes no ensaio. Este jogo
de parˆametros material ´e posteriormente actualizado pela minimiza¸c˜ao de uma fun¸c˜ao
objectivo entre a diferen¸ca da resposta num´erica do modelo e a resposta experimental
medida. Este m´etodo ´e vers´atil mas exige a correcta modela¸c˜ao das condi¸c˜oes de
fron-teira, o que ´e particularmente dif´ıcil de conhecer na pr´atica. Por outro lado, este m´etodo
pode ser demorado na convergˆencia para os verdadeiros parˆametros material dado o seu
caracter iterativo. No sentido de ultrapassar estas limita¸c˜oes, novas estrat´egias de
identi-fica¸c˜ao tˆem vindo a ser propostas, de entre as quais o m´etodo dos campos virtuais (MCV)
(Pierron and Gr´ediac, 2012). Uma vantagem deste m´etodo ´e a directa identifica¸c˜ao dos
parˆametros materiais no caso de propriedades el´asticas (isotr´opicas ou ortotr´opicas). Por
outro lado, este m´etodo ´e bem adaptado a informa¸c˜ao de campo, obtida por um
deter-minado m´etodo ´otico, dada a sua formula¸c˜ao integral baseado no princ´ıpio dos trabalhos
virtuais. Neste trabalho foi utilizado o MCV, cujo princ´ıpio b´asico aplicado ao problema
de flex˜ao de placas finas ´e apresentado a seguir de acordo com as referˆencias (Gr´ediac
et al., 2003; Xavier et al., 2013).
2.2.2
Princ´ıpio
O MCV ´e um m´etodo de identifica¸c˜ao baseado no processamento de informa¸c˜ao de campo
(deslocamentos, deforma¸c˜oes...), obtidas por uma t´ecnica ´otica, para a determina¸c˜ao de
parˆametros constitutivos que governam o comportamento mecˆanico dos materiais. O
MCV baseia-se no princ´ıpio do trabalho virtual, que estabelece que o somat´orio das for¸cas
internas aplicadas na deforma¸c˜ao causadas pelo campo virtual das desloca¸c˜oes ´e igual ao
somat´orio das for¸cas externas aplicadas num deslocamento virtual dos pontos de aplica¸c˜ao
das for¸cas externas aplicadas ao corpo. Nessa ausˆencia de for¸cas de volume, o princ´ıpio
dos campos virtuais pode ser descrito por
− ∫ V σ : ε⋆ dV | {z } W⋆ int + ∫ S T· u⋆ dS | {z } W⋆ ext = 0 (2.8)
onde σ ´e o tensor das tens˜oes de Cauchy, ε⋆ ´e o tensor das deforma¸c˜oes virtuais, T ´e a
distribui¸c˜ao de tra¸c˜oes externas aplicadas sobre a superf´ıcie S e u⋆ o seu deslocamento
virtual.
Na aplica¸c˜ao do MCV ´e necess´ario definir a priori a lei de comportamento. Neste trabalho
foi escolhida a teoria das placas de Love-Kirchhoff (Apˆendice 6.1). Esta teoria
baseia-se nos baseia-seguintes hip´oteses: (i) um segmento de recta inicialmente perpendicular ao eixo
neutro da placa (plano x1−x2 na Fig. 2) permanece recto e perpendicular ap´os deforma¸c˜ao
(ε13 = ε23= 0); (ii) a placa ´e inextens´ıvel ao longo da dire¸c˜ao x3 (ε33= 0). Neste caso os
campos de deslocamento e deforma¸c˜ao na placa s˜ao fun¸c˜oes lineares da primeira e segunda
derivada partial da deflex˜ao da placa (u3(x1, x2)), respectivamente. Na teoria da flex˜ao
de placas, as componentes de tens˜ao ({σ}) s˜ao integradas ao longo da espessura da placa
(h) definindo momentos de flex˜ao resultantes ({M}), enquanto que as componentes das
deforma¸c˜oes ({ε}) s˜ao dadas em fun¸c˜ao do campo de curvaturas ({K}), respectivamente,
de acordo com as seguintes express˜oes (ver Anexo 6)
{σ} = 12
h3 x3{M} e {ε} = x3 {K}. (2.9)
Admite-se nesta etapa que o material ´e homog´eneo no interior da placa. Desta forma, o
integral de volume no primeiro membro na Eq. (2.8), simplifica-se pela integra¸c˜ao ao longo
da espessura da placa (x3) num integral de superf´ıcie. Assim, substituindo as Eqs. (2.9)
no PTV (Eq. 2.8) obtˆem-se
∫ S {M}T{K⋆} dS = n ∑ j=1 Fju⋆3j (2.10)
em que n representa o n´umero de cargas pontuais aplicadas na placa e Fj o valor da carga
aplicada `a placa. As equa¸c˜oes constitutivas do par momento flector-curvature para um
material isotr´opico escrevem-se como
{M} = ∫ h 2 −h 2 {σ} x3 dx3 = h3 12[Q]{K} = [D]{K} (2.11) onde, M11 M22 M12 = D11 D12 0 D12 D11 0 0 0 (D11− D12)/2 K11 K22 K12 (2.12) = h 3 E 12 (1− ν2) 1 ν 0 ν 1 0 0 0 (1−ν)2 K11 K22 K12 (2.13)
em que [D] representa a matrix de flexibilidade em flex˜ao, E is m´odulo de Young e ν
is coeficiente de Poisson. Al´em disso, o m´odulo de corte pode ser dado pelas seguintes
rela¸c˜oes: G = E/2(1 + ν) = (12/h3)D66, com D66 = (D11 − D12)/2. Ao substituir a
equa¸c˜ao constitutiva (Eq.2.12) no PTV (Eq. 2.8) obtemos a seguinte equa¸c˜ao
∫ S {K}T[D]{K⋆} dS = n ∑ j=1 Fju⋆3j (2.14a) ou, desenvolvendo D11 ∫ S (K11K11⋆ + K22K22⋆ + 1 2K12K ⋆ 12) dS + (2.14b) D12 ∫ S (K11K22⋆ + K22K11⋆ − 1 2K12K ⋆ 12) dS = n ∑ j=1 Fju⋆3j.
onde os parˆametros desconhecidos de rigidez `a flex˜ao (Dij) s˜ao expressos em fun¸c˜ao do
campos de curvatura medido ({K}), da for¸ca aplicada (Fj), e dos campos de deflex˜ao
(u⋆
3j) e curvatura ({K
⋆}) virtuais.
Nesta fase o MCV consiste em escrever a Eq. (2.14b) com tantos campos virtuais
cinema-ticamente admiss´ıveis quantos parˆametros contitutivos a determinar. Este procedimento
conduz a um sistema linear de equa¸c˜oes da forma
[P ]{D} = {R} (2.15a) ou, ∫ SK11dS ∫ SK22dS ∫ SK22dS ∫ SK11dS D11 D12 = n ∑ j=1 Fj u ⋆ (1) 3j (x1, x2) u⋆ (2)3j (x1, x2) (2.15b)
que pode ser resolvido para as componentes do rigidez `a flex˜ao, desde que os campos de
curvaturas sejam medidos ao longo da superf´ıcie da placa e os campos virtuais (u⋆ (k)3 , Kij⋆ (k)
com k = 1, 2) sejam linearmente independentes (i.e., [P ]−1 existe).
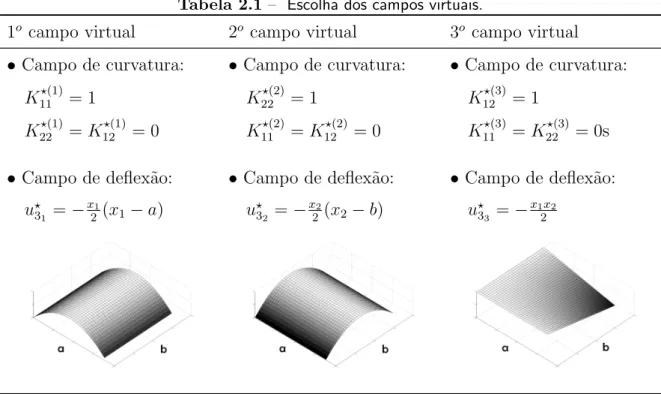
2.2.3
Escolha dos campos virtuais
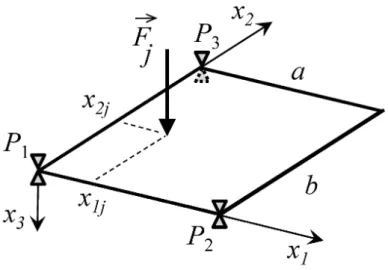
Para abordar o problema da escolha dos campos virtuais, considere-se o exemplo
repre-sentado na Figura 2.2. Nesta caso, a placa ´e suportada em trˆes pontos: P1(0, 0), P2(a, 0)
e P3(b, 0). Os campos virtuais que figuram na Eq. (2.14b) s˜ao fun¸c˜oes matem´aticas,
con-tinuas e diferenci´aveis, que devem satisfazer as condi¸c˜oes de fronteira do problema (i.e.,
Figura 2.2 – Ensaio de flex˜ao de placa fina.
serem cinematicamente admiss´ıveis). Neste trabalho os campos virtuais escolhidos
cor-respondem a curvaturas virtuais constantes como se ilustra na Tabela 2.1. ´E f´acil de
constatar que estes campos virtuais verificam os deslocamentos impostos nos trˆes
pon-tos de fixa¸c˜ao da placa. Al´em disso, estes campos virtuais correspondem fisicamente a
campos de curvatura para solicita¸c˜oes em flex˜ao segundo o eixo x1 (1 campo virtual) e
x2 (2 campo virtual) da placa, assim como ´a tor¸c˜ao da placa (3o campo virtual). Para
a resolu¸c˜ao do sistema de Eqs. (2.15), os campos virtuais 1 e 2 (Table 2.1) podem se
escolhidos conduzindo ao seguinte sistema linear de equa¸c˜oes
∫ SK11dS ∫ SK22dS ∫ SK22dS ∫ SK11dS D11 D12 = − n ∑ j=1 Fj x1j 2 (x1j− a) x2j 2 (x2j− b) . (2.16)
Os integrais nas Eqs. (2.16) podem ser aproximados pela regra do rectˆangulo. Desta forma,
a escolha de um sistema de carregamento F1(x11, x21) (j = n = 1) (Fig. 2.2) conduz a
identifica¸c˜ao de todas as componentes independentes da matriz de rigidez `a flex˜ao. Al´em
disso, ´e poss´ıvel obter uma terceira equa¸c˜ao usando o 3o campo virtual (Table 2.1), que
pode ser usada como uma verifica¸c˜ao da condi¸c˜ao de isotr´opica da placa de MDF. Assim,
pode-se ter uma avalia¸c˜ao independente de D66= (D11− D12)/2 escolhendo um segundo
sistema de carregamento F2(x12, x22) tal que
Tabela 2.1 – Escolha dos campos virtuais.
1o campo virtual 2o campo virtual 3o campo virtual
• Campo de curvatura: • Campo de curvatura: • Campo de curvatura:
K11⋆(1)= 1 K22⋆(2)= 1 K12⋆(3) = 1
K22⋆(1)= K12⋆(1) = 0 K11⋆(2) = K12⋆(2) = 0 K11⋆(3) = K22⋆(3) = 0s • Campo de deflex˜ao: • Campo de deflex˜ao: • Campo de deflex˜ao:
u⋆ 31 =− x1 2 (x1− a) u ⋆ 32 =− x2 2 (x2− b) u ⋆ 33 =− x1x2 2 D66 =− F2 2∫SK12 dS x12x22 (2.17)
aonde x12 ̸= 0 e x22 ̸= 0. Experimentalmente, para resolver as Eqs. (2.16) e (2.17), o
ensaio de flex˜ao de uma placa pode ser executado independentemente duas vezes usando
dois sistemas de carregamento distintos. O segundo ensaio pode ser utilizado como um
teste de avalia¸c˜ao da qualidade do fabrico da placa MDF (aleatoriedade - isotropia - da
distribui¸c˜ao de fibras no processo de fabrico da placa MDF).
3
Trabalho Experimental
3.1
Material e provetes
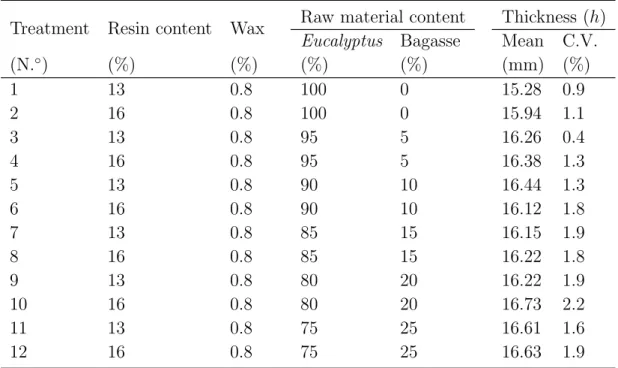
As placas de MDF foram fabricadas a partir de fibras de eucalipto incorporando uma certa
percentagem de part´ıculas cana de a¸c´ucar, de acordo com os tratamentos identificados na
Tabela 3.1. As fibras de eucalipto e as part´ıculas de cana de a¸c´ucar foram secas (70oC;
2-3% humidade) e aglomeradas utilizando resina de formalde´ıdo de ureia e a emuls˜ao da
cera (Belini et al.,2012). Os placas de MDF foram manualmente dispostos numa caixa de
madeira, colocada sobre uma placa de alum´ınio. Foi aplicada uma press˜ao manual sobre a
cobertura da caixa. Depois, o manto de fibras foi colocado sobre press˜ao num laborat´orio
de press˜ao da Siempelkamp, onde os n´ıveis aumentam controladamente em cada estado,
a uma temperatura constante de 190◦C. Seguidamente, os pain´eis foram arrefecidos at´e
`
a temperatura ambiente e cortados com as dimens˜oes nominais de 15 × 370 × 370 mm
e com densidade nominal de 750 Kg/m3. Foram preparados 12 provetes para os ensaios
mecˆanicos (Tabela 3.1).
3.2
Medi¸
c˜
oes de campo: deflectometria
3.2.1
Prepara¸
c˜
ao da superf´ıcie reflectora
O princ´ıpio f´ısico da t´ecnica da deflectometria requer que a superf´ıcie de interesse seja
especular (superf´ıcie reflectora) (Sess˜ao 2.1.2). Contudo, naturalmente as placas MDF
n˜ao satisfazem esse pr´e-requisito. Neste caso, ´e necess´ario transferir para a superf´ıcie das
Tabela 3.1 – Composition of MDF panels and treatments.
Treatment Resin content Wax Raw material content Thickness (h)
Eucalyptus Bagasse Mean C.V.
(N.◦) (%) (%) (%) (%) (mm) (%) 1 13 0.8 100 0 15.28 0.9 2 16 0.8 100 0 15.94 1.1 3 13 0.8 95 5 16.26 0.4 4 16 0.8 95 5 16.38 1.3 5 13 0.8 90 10 16.44 1.3 6 16 0.8 90 10 16.12 1.8 7 13 0.8 85 15 16.15 1.9 8 16 0.8 85 15 16.22 1.8 9 13 0.8 80 20 16.22 1.9 10 16 0.8 80 20 16.73 2.2 11 13 0.8 75 25 16.61 1.6 12 16 0.8 75 25 16.63 1.9
placas uma camada de revestimento refletora. Diferentes procedimentos foram inicial-mente testados numa abordagem de tentativa-erro utilizando diferentes tipos de produtos
(vernizes, resinas...). A melhor solu¸c˜ao, em termos de reflex˜ao especular, foi obtida
utili-zando uma resina de ep´oxido. O procedimento implementado baseia-se no procedimento
proposto porKim et al.(2007), para reflex˜ao especular de placas de materiais comp´ositos
de matrizes polim´ericas. Por forma a garantir o nivelamento do revestimento resinoso, foi
usada uma superf´ıcie vidrada. Sobre a superf´ıcie de vidro foi aplicada cera de abelha com
a fun¸c˜ao de agente desmoldante. Na aplica¸c˜ao da cera foram tidos cuidados particulares
para evitar res´ıduos ou poeiras, que localmente poder˜ao perturbar a forma¸c˜ao de
ima-gem por reflex˜ao. O seguinte procedimento foi usado para se obter a superf´ıcie especular
desejada nas placas MDF:
(1) Polir a superf´ıcie da placa, com lixa de granulometria 240, de forma a remover
im-perfei¸c˜oes e melhorar o nivelamento da placa;
(2) Aplicar uma pasta, com a ajuda de uma esp´atula met´alica, de forma a lacrar e a
prevenir absor¸c˜oes por parte da placa. Deixar secar durante 24 horas;
(3) Polir a superf´ıcie da placa, com lixa de granulometria 400, de forma a remover a
massa aplicada e imperfei¸c˜oes relacionadas;
Figura 3.1 – Placa MDF: (a) superf´ıcie natural, (b) superficie especular revestida com resina ep´oxida.
(5) Aplicar uma camada fina de spray preto mate (este procedimento pretende favorecer
o contraste da imagem final reflectida pela absor¸c˜ao de luz reflectida directamente
sobre a superf´ıcie de placa sobre a camada de resina). Secagem durante 24 horas;
(6) Aplicar resina epoxy SD Surf Clear (SICOMIN, Fran¸ca1 numa por¸c˜ao 3:1 (resina
- catalisador). Por fim, colocar a placa de vidro (face polida com cera de abelha)
sobre a superf´ıcie de interesse (remover a forma¸c˜ao de bolhas de ar);
(7) Sobrecarregar a superf´ıcie do vidro com pesos, de forma uniforme, de maneira a
obter uma fixa¸c˜ao apropriada entre o vidro e a resina e consequentemente para se
obter uma vitrifica¸c˜ao optimizada;
(8) Deixar curar durante 3 dias, a uma temperatura de 20◦C e 60% de humidade
rela-tiva (Fig.3b);
(9) Remover cuidadosamente o vidro da placa, com a ajuda de um objecto afiado ao longo das bordas do vidro.
As imagens antes e ap´os aplica¸c˜ao da resina sobre a superf´ıcie de MDF est˜ao representadas
na Figura 3.1.
3.2.2
Sistema ´
optico
A grelha utilizada na t´ecnica da deflectometria deve ser escolhida tendo em conta as
dimens˜oes da placa (L, W mm), da resolu¸c˜ao em pix´eis da cˆamara digital (H, V pix´eis) e
1SICOMIN (http://www.sicomin.com/) ´e representada em Portugal pela empresa REBELCO, Parque
Doroana Armazem CG Rua S˜ao Francisco,786 Adroana 2645-019 Alcabideche (http://www.rebelco.pt/)
Figura 3.2 – Ensaio de flex˜ao ´a placa acopulado com a t´ecnica da deflectometria: (a) sistema de fixa¸c˜ao da placa; (b) sistema de carregamento; (c) imagem da grelha; (d) sistema ´otico cˆamera-lente.
do n´umero de pix´eis escolhidos para observar (discretizar) um per´ıodo da grelha (N ). Ao
escolhermos L = W = 370 mm, H = 1624 pix´eis, V = 1236 pix´eis, e N = 10 pix´eis/per´ıodo,
foi calculado um passo da grelha (p) de 6 mm/per´ıodo (p = 2N × max{L/H, W/V })
(Tabela 3.2).
Uma grelha com linhas horizontais e verticais (grelha cruzada) foi impressa em papel mat,
formato A0 (841×1189 mm), tendo sido usada uma impressora a laser. No centro da grelha
foi aberto um furo com 25 mm de diˆametro, atrav´es do qual o sistema ´optico ir´a observar a
imagem virtual da grelha reflectida na placa MDF. Esta grelha foi fixa num suporte r´ıgido
de forma a permanecer est´atica durante os ensaios de flex˜ao (Figura 3.2(c)). A distˆancia
entre a grelha e a placa MDF ´e de D = 2810 mm (Tabela 3.2). Nesta configura¸c˜ao a
sensibilidade da t´ecnica ´e de s = 5897 (Tabela 3.2).
As imagens foram adquiridas por uma cˆamera digital Baumer Optronic FWX20 de 8-bits
acoplada de uma lente Zoom Nikoor AF 28-105 f /3.5-4.5D da Nikon (Tabela 3.2). O
suporte do sistema ´optico foi montado num trip´e Foba ALFAE e posicionado por tr´as da
grelha, ao n´ıvel do furo (Figura3.2(d)). Como ser´a de prever, na localiza¸c˜ao do furo, n˜ao
h´a reflex˜ao da grelha e portanto n˜ao existir´a informa¸c˜ao dispon´ıveis; contudo, a ´area do
furo no plano objecto representa apenas 0,4% da regi˜ao de interesse. A distˆancia focal da
lente (zoom) foi ajustada de forma a garantir uma distribui¸c˜ao espacial uniforme de N =
10 pix´eis/per´ıodo ao longo de toda a imagem da grelha (I(x, y)). Esta condi¸c˜ao ´e satisfeita
quando, ao analisar a subimagem I(x, y)/N , as franjas de moir´e tendem a desaparecer do
campo de vis˜ao, isto ´e, o n´umero de franjas tende para zero. A focagem ´e realizada sobre
a imagem virtual da grelha reflectida sobre a superf´ıcie da placa MDF. Nesta opera¸c˜ao
Tabela 3.2 – Componentes do sistema ´otico e parˆametros de medida.
Sistema ´otico
Cˆamera digital Baumer Optronic FWX20
8 bit, 1624×1236 pix´eis
lente Zoom Nikoor AF 28-105 f /3.5-4.5D
n´umero-f : 11
Ilumina¸c˜ao LED Raylux 25
Parˆametros
Distˆancia de trabalho D = 2810 mm
Grelha p = 6 mm
Sensibilidade s = 5897 mm
Resolu¸c˜ao espacial ∆x = 3 mm
Resolu¸c˜ao em fase σϕ = 0,74◦
o diafragma da lente foi completamente aberto (abertura m´axima de f /3.5). Contudo,
durante o ensaio, a abertura foi reduzida para f /11, de forma a maximizar a profundidade
de campo (para uma determinada distˆancia focal e distˆancia de trabalho provete-cˆamera).
O tempo de exposi¸c˜ao foi definido como sendo 40 ms. Foi usada uma luz branca LED
Raylux 25 por forma a iluminar uniformemente a grelha (Figura 3.2(c)).
A resolu¸c˜ao associada `a t´ecnica de deflectometria foi definida como o desvio padr˜ao do
campo (sinal) de ru´ıdo obtido aquando do processamento de imagens est´aticas, para as
quais n˜ao foi introduzida qualquer deforma¸c˜ao. Pelo tratamento estat´ıstico deste sinal
aleat´orio foi determinada uma resolu¸c˜ao em fase (σϕ) de 0.013 radianos (0,74◦).
Conse-quentemente, foi determinado uma resolu¸c˜ao em declive (rota¸c˜ao) (σα = σϕ/S) de 2.2
µradianos (Tabela 3.2). A resolu¸c˜ao espacial associada `as medi¸c˜oes de deflectometria,
definida como a menor distˆancia entre duas medi¸c˜oes independentes, ´e aproximadamente
igual ao passo da grelha no plano da placa (objecto). Assim sendo, e como existe um
factor de transferˆencia de 0,5 entre o plano da grelha e o plano da superf´ıcie da placa, a
resolu¸c˜ao espacial no plano objecto ´e de ∆x = 3 mm (Tabela 3.2).
3.3
Ensaio mecˆ
anico de flex˜
ao de placa
Para o ensaio de flex˜ao de placa foi desenvolvido um sistema de carregamento como se
mostra na Figura 3.2(a) e (b). A placa MDF ´e fixa verticalmente em alguns pontos de
encastramento e a for¸ca ´e aplicada pontualmente na face oposta ao revestimento especular,
induzindo flex˜ao na placa. Na constru¸c˜ao do sistema de ensaio, foram usados perfis Maytec
de forma a flexibilizar a escolha dos pontos de fixa¸c˜ao assim como a posi¸c˜ao do ponto de
aplica¸c˜ao da for¸ca. Neste trabalho as placas MDF foram fixas em trˆes pontos como
representado na Figura 3.2(a). A carga foi aplicada nas extremidades segundo dois casos
de carregamento (Figura 2.2): (i) ponto de aplica¸c˜ao da carga na coordenada (0, b/2); (i)
ponto de aplica¸c˜ao da carga na coordenada (a, b/2). A carga foi aplicada com a ajuda de
uma c´elula de carga DBB, do tipo ”S”(Applied Measurements Limited) de 5 kN, montada
num guiamento linear. O valor da carga aplicada foi registado por um sistema SPIDER
8 da HBM. A for¸ca foi introduzida fazendo-se avan¸car o guiamento linear atrav´es da
rota¸c˜ao de um parafuso. Uma sequˆencia de imagens foi registada durante o ensaio a cada
incremento de 0.08 mm do ponto de aplica¸c˜ao da for¸ca.
4
Resultados e Discuss˜
ao
4.1
Avalia¸
c˜
ao dos campos de rota¸
c˜
oes
As imagens da grelha, obtidas durante o ensaio de flex˜ao a que as placas foram submetidas,
foram primeiramente processadas para avalia¸c˜ao dos campos de fase. Estes mapas de fase
definem a posi¸c˜ao na grelha a cada n´ıvel de for¸ca aplicado. Para come¸car, a imagem da
grelha (linhas cruzadas) foi dividida em duas imagem separadas, um s´o com linhas verticais
e outro s´o com linhas horizontais. Esta etapa de pr´e-processo ´e necess´aria para se poder
avaliar separadamente as duas componentes do campo de fase (rota¸c˜ao), de acordo com o
sistema de coordenadas definido pelas linhas da grelha. Para este prop´osito, as imagens
foram filtradas usando uma janela triangular, com comprimento 2N − 1 pix´eis, onde N
representa o n´umero de pix´eis correspondentes a um per´ıodo da grelha.
As componentes de fase, correspondentes a cada imagem, foram determinados usando
um m´etodo de c´alculo de fase (Surrel, 1999). Este c´alculo origina uma fase de m´odulo
2π, pelo que um algoritmo para desembrulhar a fase ´e necess´ario para remover saltos de
fase e assim obter campos cont´ınuos. Para o desdobramento de fase foi usado o m´etodo
de Goldstein (Ghiglia and Pritt, 1998). Um ponto perto de um dos suportes da placa
´
e usado para iniciar o processo de desdobramento da fase, aonde a rota¸c˜ao da placa
´
e min´ıma ou praticamente nula. Mesmo que a rota¸c˜ao local n˜ao seja verdadeiramente
zero, este c´alculo n˜ao afeta a reconstru¸c˜ao do campo de curvatura porque este ´e obtido
posteriormente atrav´es de um processo de diferencia¸c˜ao. A Figura 4.1 representa os
componentes correspondentes ao campo das rota¸c˜oes (Eq.4): (I) θ1(x1, x2) e (II) θ2(x1, x2)
(para um caso de carregamento com F(0,b/2), para uma placa MDF com 13% de resina
(a) (b)
Figura 4.1 – Campo de rota¸c˜oes: (a) θX(x, y), (b) θY(x, y) (F = 45.1 N; caso de carregamento
F(0,b/2)).
e 0% de cana-de-a¸c´ucar).
4.2
Reconstru¸
c˜
ao do campo das curvaturas
O campo de rota¸c˜oes da placa submetida a flex˜ao foi determinado a partir do campo de
varia¸c˜ao de fase e da sensibilidade da t´ecnica. Por sua vez, a partir do campo de rota¸c˜oes
´
e poss´ıvel determinar o campo de curvaturas da superf´ıcie externa da placa por deriva¸c˜ao
num´erica. Para proceder a esta deriva¸c˜ao o campo de rota¸c˜oes iniciais foi aproximado
no sentido do m´etodo dos m´ınimos quadrados usando uma fun¸c˜ao polinomial. Este
pro-cedimento permite suavizar (filtrando ru´ıdo) a informa¸c˜ao do campo antes do processo
de deriva¸c˜ao. Esta abordagem tem a vantagem de ser um procedimento relativamente
simples, possibilitar a pondera¸c˜ao cada ponto de medida (em certos pontos os dados
po-der˜ao n˜ao existir ou possuem um ru´ıdo de medida elevado), e a possibilidade de se efetuar
interpola¸c˜oes ou extrapola¸c˜oes em pontos onde os dados iniciais n˜ao est˜ao dispon´ıveis
(por exemplo, por defeitos no revestimento da grelha). Por outro lado, tamb´em existem
desvantagens, tais como: (1) quando se usam polin´omios de grau elevado, verifica-se uma
certa instabilidade na reconstru¸c˜ao do campo nomeadamente nos bordos da regi˜ao de
interesse; (2) dada a natureza global da aproxima¸c˜ao usando fun¸c˜oes polinomiais, os erros
locais poder˜ao propagar-se na reconstru¸c˜ao do campo.
Figura 4.2 – Varia¸c˜ao do desvio padr˜ao dos campos residuais obtidos pela subtra¸c˜ao dos campos de rota¸c˜oes medidas e aproximadas.
(a) (b) (c)
Figura 4.3 – (Campos de curvatura: (a) Kxx (K1), (b) Kyy (K2), (c) Kxy (K6) (F = 45.1 N;
caso de carregamento F(0,b/2)).
Uma quest˜ao importante na aproxima¸c˜ao polinomial ´e a escolha da ordem do
polino-mial. Este valor foi escolhido ap´os terem sido analisados os mapas residuais obtidos pela
subtra¸c˜ao dos campos de rota¸c˜oes medidos e os campos de rota¸c˜oes aproximados, com
especial aten¸c˜ao aos graus de polin´omio que variam do segundo grau at´e ao vig´esimo grau.
Os resultados deste estudo est˜ao ilustrados na Figura4.2. Desta an´alise, foi escolhido um
grau de polinomial de 8, num compromisso entre tempo de computa¸c˜ao e convergˆencia
para uma resolu¸c˜ao na ordem de 10−5 µm/m. Os campos de curvatura reconstru´ıdos a
partir desta abordagem est˜ao representados na Figura4.3 (para um caso de carregamento
com F(0,b/2), para uma placa MDF com 13% de resina e 0% de cana-de-a¸c´ucar).
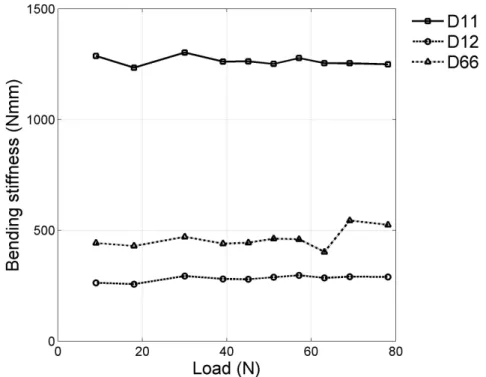
Figura 4.4 – Avalia¸c˜ao dos parˆametros de rigidez `a flex˜ao duma placa MDF em fun¸c˜ao da for¸ca aplicada.
4.3
Identifica¸
c˜
ao das componentes de rigidez `
a flex˜
ao
Os campos de curvatura, assim como dimens˜oes da placa e for¸ca aplicada, foram inseridos
no m´etodo dos campos virtuais (MCV) para a identifica¸c˜ao dos parˆametros de rigidez
da placa em flex˜ao. A Figura 4.4 mostra, para um exemplo de placa MDF, a evolu¸c˜ao
das componentes de rigidez `a flex˜ao em fun¸c˜ao da for¸ca aplicada (combinando ensaios
com for¸cas aplicas em F(0,b/2) e F(a,B/2)). Como se pode constatar desta an´alise, a
identifica¸c˜ao de resultados ´e relativamente est´aveis para os valores de for¸ca aplicados `a
placa em flex˜ao.
Os valores das componentes de rigidez `a flex˜ao (Dxx, Dyy e Dss) das placas MDF, com
di-ferentes tratamentos, identificados pela metodologia inversa, est˜ao expostos na tabela4.1.
Os valores m´edios da rigidez das placas com diferentes caracter´ısticas tamb´em foi
avali-ado. Dada a baixa dispers˜ao dos resultados obtidos podemos concluir que embora as
percentagens das fibras que constituem as placas MDF sejam diferentes, n˜ao existe uma
varia¸c˜ao significativa do comportamento das placas nos ensaios mecˆanicos. Para crit´erio
de compara¸c˜ao com os valores de referˆencia (E na tabela4.1), estes parˆametros de rigidez
foram convertidos em constantes de engenharia. O coeficiente de Poisson foi determinado
de acordo com a rela¸c˜ao ν = Dxy/Dxx. Em virtude de n˜ao se ter acesso `a medi¸c˜ao
expe-rimental deste parˆametro, foi admitido neste caso um valor de ν = 0.21. Este valor esta
de acordo com valores na literatura que apontam para valores de ν compreendidos entre
0.14 e 0.28 (Moboru and Taeko,2004).
Assumindo que ν = 0.21 e considerando as espessuras das placas, h, (ver tabela 3.1), a
convers˜ao para o m´odulo de Young e para o m´odulo de corte, pode ser calculada
expli-citamente (tabela 4.1). Na maioria dos casos, o m´odulo de Young medido nos ensaios
de flex˜ao de placa foi superiores ao valor do m´odulo de Young de referˆencia determinado
pelos ensaios de flex˜ao em trˆes pontos. Contudo, apesar desta diferen¸ca (em m´edia de
12%) pode-se considerar dentro da dispers˜ao esperada pelos ensaios experimentais.
Tendo em conta o relacionamento isotr´opico constitutivo, G = E/(2(1 + ν)) , os valores de
referˆencia para o m´odulo de corte foram estimados (tabela 4.1). Comparando os valores
obtidos pelo m´etodo dos campos virtuais (VFM), estes diferem em m´edia 14% dos valores
de referˆencia.
T ab ela 4.1 – Prop riedades de rigidez `a flex ˜ao das placas MDF determinados a pa rtir de ensaios de flex ˜ao de placa e ensaios cl ´assicos de flex ˜ao em 3 p ontos. T reatmen t Ensaios de flex˜ ao em 3 p on tos (a ) Ensaios de flex˜ ao de placa (b ) N. ◦ E (C.V.) G (c ) D 11 D 12 D 66 ν (d ) E (e ) G (f ) G (g ) (N/mm 2 ) (N.m) (-) (N/mm 2 ) 1 3398 (12.9%) 1325 1256 355 434 0.28 3887 1515 1459 2 3643 (8.0%) 1475 1499 353 552 0.24 4195 1698 1636 3 3067 (11.9%) 1239 1351 321 495 0.24 3558 1437 1383 4 3533 (10.8%) 1381 1418 396 538 0.28 3570 1395 1469 5 3256 (10.2%) 1289 1324 349 492 0.26 3328 1317 1329 6 3732 (9.4%) 1490 1368 345 522 0.25 3670 1466 1495 7 3419 (11.2%) 1339 1240 343 471 0.28 3262 1277 1341 8 3543 (11.8%) 1434 1361 320 536 0.24 3615 1463 1507 9 3213 (8.3%) 1295 1250 300 474 0.24 3312 1335 1334 10 3408 (12.9%) 1408 1368 287 558 0.21 3352 1385 1429 11 3345 (10.8%) 1388 1375 282 520 0.21 3448 1430 1362 12 3158 (9.1%) 1254 1293 335 529 0.26 3147 1250 1380 M ´edia 3393 1360 1342 332 510 0.25 3529 1414 1427 C.V. (h ) (%) 5.86 6.11 5.62 9.70 7.30 10.27 8.31 8.51 6.39 ( a ) Mo dulo de elasticidade (MOE) determinados p or testes de flex˜ ao standard ap oiados em 3 p on tos assumindo a teoria de Euler-Bernoulli ( b ) P arˆ ametros de rigidez `a flex˜ ao iden tificados p elo M ´eto do dos Camp os Virtuais assumindo a teoria Kirc hhoff-Lo v e ( c ) G = E / 2(1 + ν ), b y taking ν = D 12 /D 11 (from plate b ending tests) ( d ) ν = D 12 /D 11 ( e ) E = (12 /h 3 )(1 − ν 2 )D 11 (h in T able 3.1 ) ( f ) G = (6 /h 3 )(1 − ν )D 11 ( g ) G = (12 /h 3 )D 66 ( h ) Co efficien t of v ariation (C.V.) 28
5
Conclus˜
oes e trabalho futuro
Neste trabalho apresenta-se um m´etodo de identifica¸c˜ao inversa para a avalia¸c˜ao
si-multˆanea das componentes de rigidez `a flex˜ao de placas MDF. Para o efeito, foi
pro-posto um ensaio de flex˜ao de placa fina, assumindo-se um comportamento de placa de
Love-Kirchhoff. A t´ecnica ´otica de defletometria foi usada para a medi¸c˜ao do campo de
declives em toda a superf´ıcie da placa durante o ensaio. Uma vez que esta t´ecnica se
baseia no princ´ıpio da reflex˜ao especular da imagem da grelha sobre a placa, um
pro-cedimento experimental foi implementado para o revestimento reflector da superf´ıcie da
placa. Os campos de curvatura foram ent˜ao reconstru´ıdos por diferencia¸c˜ao num´erica,
usando polin´omios de grau oito para filtrar os dados experimentais. O M´etodo de Campo
Virtual (MCV) foi utilizado para a identifica¸c˜ao de parˆametros material. Os resultados
obtidos, embora, sistematicamente maiores do que os de referˆencia determinados a partir
de ensaios cl´assicos de flex˜ao em trˆes pontos, estavam num acordo satisfat´orio, validando
assim o procedimento de identifica¸c˜ao inverso proposto.
Como trabalhos futuros, a configura¸c˜ao do ensaio de flex˜ao poder´a ainda ser objecto
de optimiza¸c˜ao no sentido de se obter uma resposta mecˆanica complexa apenas com um
sistema de carregamento. Nesse sentido, ser´a ainda necess´aria a implementa¸c˜ao de campos
virtuais optimizados no desenvolvimento do MCV. Por outro lado, este procedimento
poder´a ser aplicado em ensaios de flex˜ao sobre madeira maci¸ca para a identifica¸c˜ao de
componentes de rigidez `a flex˜ao assumindo um comportamento ortotr´opico.
Referˆencias
Avril, S., Bonnet, M., Bretelle, A.-S., Gr´ediac, M., Hild, F., Ienny, P., Latourte, F.,
Lemosse, D., Pagano, S., Pagnacco, E., and Pierron, F. (2008). Overview of identifica-tion methods of mechanical parameters based on full-field measurements. Experimental Mechanics, 48(4):381–402.
Belini, U., Tomazello Filho, M., Louzada, J., Rodrigues, J., and Astolphi, J. (2012). Pilot study for MDF manufacture from sugarcane bagasse and eucalyptus fibers. European Journal of Wood and Wood Products, 70:4.
EN 310 (1993). Wood-based panels, determination of modulus of elasticity in bending and bending strength. European Committee for Standardization, Brussels, Belgium.
Ghiglia, D. and Pritt, M. (1998). Two-dimensional phase unwrapping: Theory, algorithms, and software. John Wiley & Sons.
Goldstein, R., Zebker, H., and Werner, C. (1988). Satellite radar interferometry - two-dimensional phase unwrapping. Radio Science, 23(4):713–720.
Gr´ediac, M. (2004). The use of full-field measurement methods in composite material
characterization: Interest and limitations. Composites Part A: Applied Science and Manufacturing, 35(7-8):751–761.
Gr´ediac, M., Toussaint, E., and Pierron, F. (2003). Special virtual fields for the direct
determination of material parameters with the virtual fields method. 3- Application
to the bending rigidities of anisotropic plates. International Journal of Solids and Structures, 40(10):2401–2419.
Kim, J.-H., Pierron, F., Gr´ediac, M., and Wisnom, M. (2007). A procedure for
pro-ducing reflective coatings on plates to be used for full-field slope measurements by a deflectometry technique. Strain, 43(2):138–144.
Lopes, H. M. R. (2007). Desenvolvimento de T´ecnicas Interferom´etricas, Cont´ınuas e
Pul-sadas, Aplicadas `a An´alise do Dano em Estruturas Comp´ositas. PhD thesis, Faculdade de Engenharia da Universidade do Porto.
Moboru, S. and Taeko, S. (2004). Poisson’s ratio of wood-based panels and Poisson’s effect of hygroscopic linear expansion under a uniaxially dimensional restraint. Journal of the Society of Materials Science, 53(4):396–401.
M¨uller, U., Sretenovi, A., Vincenti, A., and Gindl, W. (2005). Direct measurement of
strain distribution along a wood bond line. Part 1: Shear strain concentration in a lap joint specimen by means of electronic speckle pattern interferometry. Holzforschung, 59(3):300–306.
Pierron, F. and Gr´ediac, M. (2012). The virtual fields method. Springer New York.
Surrel, Y. (1999). Fringe analysis. In Rastogi, P., editor, Photomechanics (Topics in Applied Physics), pages 57–104. Springer Verlag.
Surrel, Y. (2004). Deflectometry: A simple and efficient noninterferometric method for slope measurement. In Xth SEM International Congress on Experimental Mechanics. Society for Experimental Mechanics, 7-10 June in Costa Mesa, California, USA.
Xavier, J., Belini, U., Pierron, F., Morais, J., Lousada, J., and Tomazello, M. (2013). Characterisation of bending stiffness components of MDF panels from full-field slope measurements. Wood Science and Technology, 47(2):423–441.
Xavier, J., de Jesus, A., Morais, J., and Pinto, J. (2012a). Stereovision measurements on evaluating the modulus of elasticity of wood by compression tests parallel to the grain. Construction and Building Materials, 26(1):207–215.
Xavier, J., Lopes, H., and Pierron, F. (2012b). Evaluating stiffness components from full-field slope measurements provided by deflectometry: phase-unwrapping analyses. In Dirckx, J. and Buytaert, J., editors, 5th International Conference on Optical Mea-surement Techniques for Structures and Systems - OPTIMESS, University of Antwerp, Belgium, 4-5 April.
6
Anexo A
6.1
Teoria de Love-Kirchhoff
A resposta mecˆanica de uma placa fina sob aplica¸c˜ao de um momento flector pode ser
descrito pela teoria das placas de Love-Kirchhoff. Esta teoria baseia-se nas seguintes
hip´oteses: (i) um segmento de recta inicialmente perpendicular ao eixo neutro da placa
(plano x1−x2na Fig. 2) permanece recto e perpendicular ap´os deforma¸c˜ao (ε13= ε23= 0);
(ii) a placa ´e inextens´ıvel ao longo da dire¸c˜ao x3 (ε33 = 0). Como base nesta teoria, o
campo dos deslocamentos de um dado ponto (x1, x2, x3) na placa ´e definido como sendo
u1(xα, x3) u2(xα, x3) u3(xα, x3) = = = uO1(xα) uO 2(xα) uO 3(xα) + + x3 θ1 = uO1(xα)− x3∂u∂x3(xα) 1 x3 θ2 = uO2(xα)− x3∂u∂x3(x2α) (6.1)
onde uOi (xα) (i = 1, 2, 3) ´e o deslocamento na superf´ıcie neutra da placa (comportamento
de membrana) e θα(α = 1, 2) ´e a rota¸c˜ao da normal `a superf´ıcie neutra da placa
(compor-tamento em flex˜ao). Nesta teoria de primeira ordem, a rota¸c˜ao da sec¸c˜ao transversal da
placa ´e uma fun¸c˜ao da primeira derivada parcial da deflex˜ao da placa (u3,α). Assumindo
a hip´otese de pequenas perturba¸c˜oes, o campo das deforma¸c˜oes num ponto (xi) ´e dado
pelas seguintes equa¸c˜oes
eεαβ(xα, x3) = εαβ(xα) + x3 kαβ(xα) (β = 1, 2) (6.2) ou, ε11 ε22 γ12 = ∂uO 1 ∂x1 ∂uO 2 ∂x2 ∂uO 1 ∂x2 + ∂uO 2 ∂x1 + x3 −∂2u 3 ∂x21 −∂2u 3 ∂x2 2 −2 ∂2u 3 ∂x1∂x2 = ε0 11 ε022 γ0 12 + x3 K11 K22 K12 (6.3)
onde,{ε0} = {ε011, ε022, γ120 }T representa o campo das deforma¸c˜oes e{K} = {K11, K22, K12}T
´
e o campo de curvatura da superf´ıcie neutra da placa.
Assume-se neste trabalho um comportamento isotr´opico, homog´eneo e linear el´astico.
Esta equa¸c˜ao escreve-se: {σ} = [Q]{ε}, onde [Q] ´e a matriz de rigidez do material, cujas
componentes podem ser descritas em fun¸c˜ao das constantes de engenharia. No problema
de flex˜ao de placas, o campo das tens˜oes ´e integrado ao longo da espessura da placa
resultando for¸cas por unidade de comprimento (N ) e momentos flectores (M ).
Conside-rando apenas flex˜ao pura, as equa¸c˜oes constitutivas relacionam momentos de flex˜ao com
curvaturas de acordo com a seguinte express˜ao
{M} = ∫ h 2 −h 2 {σ} x3 dx3 = h3 12[Q]{K} = [D]{K} (6.4) desenvolvendo, M11 M22 M12 = D11 D12 0 D12 D11 0 0 0 (D11− D12)/2 K11 K22 K12 (6.5) = h 3 E 12 (1− ν2) 1 ν 0 ν 1 0 0 0 (1−ν)2 K11 K22 K12 36
em que [D] ´e a matriz de flex˜ao `a rigidez, E ´e o modulo de elasticidade, e ν ´e o coeficiente
de Poisson. Al´em disso, o m´odulo de corte pode ser determinado pelas seguintes rela¸c˜oes:
G = E/2(1 + ν) = (12/h3)D
66, with D66 = (D11− D12)/2.