Identifica¸
c˜
ao de sistemas
M´
etodos para identifica¸
c˜
ao de modelos de estado
Por
Marta Sofia Alves Esteves
Orientador: Doutora Teresa Paula Coelho Azevedo Perdico´
ulis
Co-orientador: Doutor Paulo Jorge de Azevedo Lopes dos Santos
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie–A, Decreto-Lei n.o 74/2006 de 24 de Mar¸co e no
Regulamento de Estudos P´os-Graduados da UTAD DR, 2.a s´erie – Delibera¸c˜ao n.o 2391/2007
Identifica¸
c˜
ao de sistemas
M´
etodos para identifica¸
c˜
ao de modelos de estado
Por
Marta Sofia Alves Esteves
Orientador: Doutora Teresa Paula Coelho Azevedo Perdico´
ulis
Co-orientador: Doutor Paulo Jorge de Azevedo Lopes dos Santos
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie–A, Decreto-Lei n.o 74/2006 de 24 de Mar¸co e no
Regulamento de Estudos P´os-Graduados da UTAD DR, 2.a s´erie – Delibera¸c˜ao n.o 2391/2007
Orienta¸c˜ao Cient´ıfica :
Doutora Teresa Paula Coelho Azevedo Perdico´ulis
Professora Auxiliar com Agrega¸c˜ao do Departamento de Engenharias
Universidade de Tr´as-os-Montes e Alto Douro
Doutor Paulo Jorge de Azevedo Lopes dos Santos
Professor Auxiliar do
Departamento de Engenharia Electrot´ecnica e de Computadores Faculdade de Engenharia da Universidade do Porto
”Da determina¸c˜ao, que tens tomada, N˜ao tornes por detr´as, pois ´e fraqueza Desistir-se da cousa come¸cada.”
Lus´ıadas, Canto I
”N´os somos o que fazemos. O que n˜ao se faz n˜ao existe. Portanto, s´o existimos nos dias em fazemos. Nos dias em que n˜ao fazemos, apenas duramos”
Padre Ant´onio Vieira
”Al andar se hace el camino. | O caminho faz-se caminhando.”
Antonio Machado(1875 – 1939)
Para os meus pais e irm˜ao
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO Mestrado em Engenharia Electrot´ecnica e de Computadores
Os membros do J´uri recomendam `a Universidade de Tr´as-os-Montes e Alto Douro a aceita¸c˜ao da disserta¸c˜ao intitulada “ Identifica¸c˜ao de sistemas M´etodos para identifica¸c˜ao de modelos de estado” realizada por
Marta Sofia Alves Esteves para satisfa¸c˜ao parcial dos requisitos do grau de
Mestre.
Dezembro 2013
Presidente: Doutor Jos´e Paulo Barroso Moura Oliveira,
Professor Associado com Agrega¸c˜ao da Universidade de Tr´as-os-Montes e Alto Douro
Vogais do J´uri: Doutora Maria do Ros´ario Marques Fernandes Teixeira de Pinho,
Professora Associada da Faculdade de Engenharia da Universidade do Porto
Doutora Teresa Paula Coelho Azevedo Perdico´ulis,
Professora Auxiliar com Agrega¸c˜aoda Universidade de Tr´as-os-Montes e Alto Douro
Doutor Paulo Jorge de Azevedo Lopes dos Santos,
Professor Auxiliarda Faculdade de Engenharia da Universidade do Porto
Identifica¸c˜
ao de Sistemas
M´
etodos para Identifica¸c˜
ao de modelos de estado
Marta Sofia Alves Esteves
Submetido na Universidade de Tr´as-os-Montes e Alto Douro para o preenchimento dos requisitos parciais para obten¸c˜ao do grau de
Mestre em Engenharia Electrot´ecnica e de Computadores
Resumo — Nesta disserta¸c˜ao, s˜ao estudados alguns conceitos geom´etricos com vista `a identifica¸c˜ao em subespa¸cos de parˆametros de sistemas vari´aveis, lineares e invariantes no tempo. Os m´etodos de identifica¸c˜ao em subespa¸cos de estados constituem um novo campo da identifica¸c˜ao de sistemas, combinando desde conceitos geom´etricos de ´algebra linear e ferramentas num´ericas at´e `a introdu¸c˜ao de ideias inovadoras, nunca antes utilizadas nos m´etodos cl´assicos, tais como a inser¸c˜ao do conceito da estima¸c˜ao do estado inicial de um sistema dinˆamico.
No caso de sistemas multivari´aveis, a identifica¸c˜ao de sistemas surge sempre associada `
a identifica¸c˜ao no espa¸co de estados, dadas as vantagens deste tipo de representa¸c˜ao. A aprendizagem em identifica¸c˜ao de sistemas pode ser coadjuvada atrav´es de ferramen-tas de software espec´ıficas. O presente trabalho consiste na implementa¸c˜ao de uma
toolbox de identifica¸c˜ao em subespa¸cos de sistemas determin´ısticos, estoc´asticos e determin´ıstico-estoc´asticos, designada Subspace Identification Tool, que permite estimar as matrizes para cada um destes tipos de sistemas, de forma interativa e onde se pode acompanhar passo a passo um determinado caso de estudo na mesma janela.
Palavras Chave: Identifica¸c˜ao em subespa¸co de estados, identifica¸c˜ao de sistemas, sistemas multivari´aveis, Subspace Identification Tool.
System Identification
Methods for Identification of state models
Marta Sofia Alves Esteves
Submitted to the University of Tr´as-os-Montes and Alto Douro in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering and Computers
Abstract — In this dissertation, we study some geometrical concepts in view to
subspace identification of linear time invariant systems. This type of identification methods is a new field of system identification that combines geometrical notions from linear algebra, numerical tools as well as innovative ideas as the concept of the estimation of initial states of a dynamic system.
For multivariable systems, the identification will be always done through a subspace model for being more adequate to the system structure.
Learning subspace system identification could benefit substantially from the use of software tools to assist the user to discover the many features of this type of parameters estimation. The present work is an implementation of such a toolbox, named Subspace Identification Tool, where in a single interactive window all the features of the subspace identification are come together and the user is guided through a pre-defined path to identify deterministic, stochastic and deterministic-stochastic systems.
Key Words: Subspace system identification, system identification, multivariable
systems, Subspace Identification Tool.
Agradecimentos
Os meus agradecimentos ao Magn´ıfico Reitor da Universidade de Tr´as-os-Montes e Alto Douro, Professor Doutor Ant´onio Augusto Fontainhas, ao diretor de Mestrado em Engenharia Electrot´ecnica e de Computadores, Professor Paulo Moura Oliveira e aos restantes professores que me acompanharam ao longo deste percurso.
`
A Professora Doutora Teresa Paula Coelho Azevedo Perdico´ulis, Professora Auxiliar com Agrega¸c˜ao do Departamento de Engenharias da Universidade de Tr´as-os-Montes e Alto Douro, orientadora deste trabalho, pela sua motiva¸c˜ao, pelas suas sugest˜oes, ideias inovadoras, orienta¸c˜oes, disponibilidade e sobretudo por todo o apoio prestado ao longo destes anos.
Ao Professor Doutor Paulo Jorge de Azevedo Lopes dos Santos, Professor Auxiliar do Departamento de Engenharia Electrot´ecnica e de Computadores da Faculdade de Engenharia da Universidade do Porto, na qualidade de co-orientador, pelas suas observa¸c˜oes, orienta¸c˜oes, motiva¸c˜ao e pelo apoio igualmente prestado.
A todos os meus colegas do curso Engenharia Electrot´ecnica e de Computadores da Universidade de Tr´as-os-Montes e Alto Douro pela amizade, simpatia e apoio ao longo deste percurso acad´emico. Aos meus amigos de sempre e que cresceram comigo nesta viagem, `aqueles que chegaram um pouco depois e `aqueles que nunca deixaram de caminhar ao meu lado e que s˜ao um bocadinho de mim.
que conseguisse terminar a ´ultima fase deste longo percurso. `
A minha fam´ılia com especial enfoque, aos meus tios Manuel Machado e Maria da Luz Machado e prima Joana, por todo o tempo, aten¸c˜ao e apoio prestado ao longo destes anos.
Aos meus pais e irm˜ao por me terem acompanhado e incentivado ao longo deste trabalho, que n˜ao se esquecem nunca de me ensinar que a vida sem um sorriso n˜ao ´e viver e sobretudo por me terem incutido sempre o espirito de ambi¸c˜ao, luta, sacrif´ıcio, lealdade para comigo pr´opria.
A todos, um sincero obrigado!
UTAD, Marta Sofia Alves Esteves
Vila Real, 2013
´Indice geral
Resumo xi
Abstract xiii
Agradecimentos xv
´Indice de figuras xxi
Gloss´ario, acr´onimos e abreviaturas xxiii
1 Introdu¸c˜ao 1
1.1 M´etodos Cl´assicos. . . 2
1.2 M´etodos de subespa¸co de estados . . . 3
1.2.1 Porquˆe usar m´etodos de subespa¸co? . . . 4
1.2.2 Identifica¸c˜ao em subespa¸cos de estados . . . 5
1.3 Metodologia adotada nesta disserta¸c˜ao . . . 6
1.4 Motiva¸c˜ao e contribui¸c˜oes da disserta¸c˜ao . . . 6
1.5 Principais objetivos do trabalho . . . 7
1.6 Estrutura da disserta¸c˜ao . . . 7
2 Fundamentos de ´Algebra Linear Num´erica 9 2.1 Espa¸cos e subespa¸cos vetoriais . . . 9
2.1.1 Independˆencia linear . . . 11
2.1.2 Base de um espa¸co linear . . . 12
2.4 Matrizes . . . 19
2.4.1 Caracter´ıstica de uma matriz . . . 19
2.4.2 Equivalˆencia e semelhan¸ca de matrizes . . . 20
2.4.3 Valores e vetores pr´oprios . . . 24
2.4.4 Polin´omio caracter´ıstico . . . 25
2.4.5 Quatro subespa¸cos fundamentais associados a uma matriz . . 29
2.5 Sistemas de equa¸c˜oes lineares . . . 33
2.5.1 Ferramentas num´ericas . . . 34
2.5.2 M´etodos computacionais . . . 34
2.6 Valores Singulares e Decomposi¸c˜ao de Valores Singulares . . . 36
2.6.1 SVD . . . 38
2.6.2 Problema dos MQ . . . 40
2.7 Considera¸c˜oes finais . . . 41
3 Eqs. de E/S de sistemas LTI descritos por modelos de estado 43 3.1 Sistemas determin´ısticos . . . 43
3.1.1 As matrizes de dados . . . 44
3.1.2 Matrizes associadas . . . 46
3.1.3 As equa¸c˜oes matriciais de E/S . . . 47
3.2 Sistemas Estoc´asticos . . . 48
3.2.1 Propriedades dos sistemas estoc´asticos . . . 50
3.2.2 Subsistemas Estoc´asticos . . . 50
3.2.3 Matrizes de Hankel . . . 53
3.2.4 Estados do filtro de Kalman . . . 55
3.2.5 Sequˆencias reais definidas positivas . . . 57
3.3 Sistemas determin´ıstico-estoc´asticos . . . 58
3.3.1 Nota¸c˜ao . . . 58
3.3.2 Matrizes de Hankel . . . 60
3.3.3 Estados de filtro de Kalman . . . 61
3.3.4 As equa¸c˜oes matriciais de E/S . . . 62
3.4 Considera¸c˜oes finais . . . 63
4 Identifica¸c˜ao de sistemas em subespa¸cos de estados 65 4.1 Identifica¸c˜ao de sistemas determin´ısticos . . . 65
4.1.1 Algoritmos de identifica¸c˜ao determin´ıstica . . . 68
4.2 Identifica¸c˜ao de sistemas estoc´asticos . . . 73
4.2.1 Algoritmos de identifica¸c˜ao estoc´astica . . . 75
4.3 Identifica¸c˜ao de sistemas determin´ıstico-estoc´asticos . . . 78
4.3.1 Algoritmos de identifica¸c˜ao determin´ıstico-estoc´astica . . . 82
4.4 Considera¸c˜oes finais . . . 89
5 Usar SIT 91 5.1 Funcionalidades do SIT . . . 92
5.1.1 Como usar o SIT . . . 93
5.2 Caso de estudo - Sistema SISO . . . 95
5.2.1 Passo 1 - Importa¸c˜ao dos sinais . . . 96
5.2.2 Passo 2 - Estima¸c˜ao dos parˆametros do sistema . . . 97
5.2.3 Passo 3 - Valida¸c˜ao do modelo . . . 98
5.3 Considera¸c˜oes finais . . . 102
6 Conclus˜ao 107 6.1 S´ıntese das Conclus˜oes . . . 107
6.2 Avalia¸c˜ao e principais conclus˜oes . . . 108
6.3 Trabalho futuro . . . 109
Referˆencias bibliogr´aficas 111
´Indice de figuras
1.1 Rela¸c˜ao entre os sinais de E/S de um sistema . . . 2
1.2 M´etodos de subespa¸cos e cl´assicos de IS. . . 5
2.1 Interpreta¸c˜ao da proje¸c˜ao ortogonal num espa¸co de dimens˜ao j (neste caso j = 2). A/B ´e formado pela proje¸c˜ao do espa¸co linha de A no espa¸co linha de B. Por outro lado, A/B⊥´e formado pela proje¸c˜ao do espa¸co linha de A no complemento ortogonal do espa¸co linha de B . . 15
2.2 Interpreta¸c˜ao da proje¸c˜ao obl´ıqua num espa¸co de dimens˜ao j (neste caso j = 2). A proje¸c˜ao obl´ıqua ´e formada pela proje¸c˜ao do espa¸co linha de A ao longo do espa¸co linha de B, no espa¸co linha de C . . . 16
4.1 Ilustra¸c˜ao gr´afica do Teorema 7 . . . 68
5.1 Disposi¸c˜ao gr´afica das v´arias etapas da ISE . . . 95
5.2 Representa¸c˜ao do sinal de entrada, u(t) e de sa´ıda, y(t) . . . 95
5.3 Menu interativo . . . 97
5.4 Representa¸c˜ao do sinal de entrada e sa´ıda . . . 97
5.5 Representa¸c˜ao dos valores singulares . . . 98
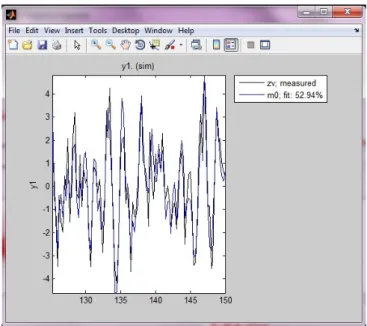
5.6 Compara¸c˜ao entre as sa´ıdas simuladas com as sa´ıdas medidas. . . 99
5.9 Representa¸c˜ao da resposta em frequˆencia . . . 102 5.10 Representa¸c˜ao dos sinais de E/S . . . 103 5.11 Representa¸c˜ao do sinal de entrada . . . 104 5.12 Representa¸c˜ao do sinal de sa´ıda . . . 104 5.13 Compara¸c˜ao entre as sa´ıdas simuladas com as sa´ıdas medidas. . . 105 5.14 Representa¸c˜ao da resposta impulsional . . . 105
Gloss´
ario, acr´
onimos e
abreviaturas
Lista de acr´
onimos
Sigla Expans˜ao
A, B, C, D Matrizes do sistema dinˆamico AR Autoregressive
ARMA Autoregressive moving average
ARX Autoregressive exogenous
ARMAX Exogenous ARMA
BJ Box-Jenkins
E/S Entrada e sa´ıdas
IS Identifica¸c˜ao de sistemas
ISE Identifica¸c˜ao em subespa¸cos de estados LTI Linear Time invariant system
MQ M´ınimos quadrados
MOESP Multi-Input Multi-Output Error State-Space Model
Realization, classe de m´etodos introduzida por Verhaegen N4SID Numerical State-Space Subspace System Identification,
classe de m´etodos proposta por Van Overschee e Bart De Moor (1996)
OE Output-error
PEM Prediction error method
SISO Single input and single output
SIMO Single input and multiple output
MIMO Multiple input and multiple output
MISO Single input and single output
SVD Decomposi¸c˜ao em valores singulares
Lista de nota¸
c˜
ao
Nota¸c˜ao Significado(s)
R(A) Espa¸co coluna de A (Tamb´em designado por
columnspace(A))
i N´umero de blocos-linha da matriz de Hankel
j N´umero de blocos-coluna da matriz de Hankel
l N´umero de sa´ıdas
m N´umero de entradas do sistema
(continua na p´agina seguinte)
(continua¸c˜ao)
Nota¸c˜ao Significado(s)
n N´umero de estadas do sistema
A† Pseudo-inversa da matriz A
A∗ Matriz conjugada de A
Γi Matriz de observabilidade estendida
Hi Matriz de Toeplitz que cont´em os parˆametros de Markov
Ci Matriz de controlabilidade estendida do par{A, C}
Oi Matriz de observabilidade estendida
N N´umero de amostras recolhidas
N (A) Espa¸co n´ucleo de A
R(AT) Espa¸co linha de A (Tamb´em designado por rowspace(A))
RU U Covariˆancia da matriz de entrada
u(t)∈ Rm Entrada do sistema
y(t) ∈ Rl Sa´ıda do sistema
U = U0 Matriz de Hankel de todos os dados de entrada
Y = Y0 Matriz de Hankel de todos os dados de sa´ıda
Up Matriz de Hankel dos dados de entrada passados
Yp Matriz de Hankel dos dados de sa´ıda passados
Uf Matriz de Hankel dos dados de entrada futuros
Yf Matriz de Hankel dos dados de sa´ıda futuros
x(t)∈ Rn Estado do sistema
Xf Vetor de estados futuros
Xp Vetor de estados passados
w(k), v(k) Sequˆencia de ru´ıdo branco (ru´ıdos do processo e de medida, respetivamente)
0V Vetor zero do conjunto V
S(W ) Subespa¸co gerado pelo conjunto W
(continua na p´agina seguinte)
WT Complemento ortogonal do subespa¸co linear W
r(A) Caracter´ıstica da matriz A (tamb´em pode ser denominada de
rank(A))
rl(A) Caracter´ıstica de linha da matriz A
rc(A) Caracter´ıstica de coluna da matriz A
δpq Delta de kronecker
Este gloss´ario est´a escrito pela ordem alfab´etica das siglas e nota¸c˜ao.
1
Introdu¸c˜
ao
A identifica¸c˜ao de sistemas (IS) utiliza sinais de entrada e sa´ıda (E/S) de um sistema, a fim de estimar os valores dos parˆametros de um modelo com uma dada estrutura.
Um modelo descreve o comportamento dinˆamico de um sistema como uma fun¸c˜ao de tempo. Os modelos matem´aticos s˜ao usados para simula¸c˜ao, an´alise, monitoriza¸c˜ao, dete¸c˜ao de falhas, previs˜ao, otimiza¸c˜ao, projeto dos sistemas de controlo, controlo de qualidade, entre outros.
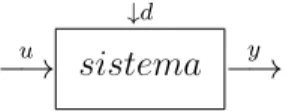
A obten¸c˜ao de um bom modelo para o sistema, depende de qu˜ao bem os dados medidos refletem o seu comportamento. Assim, ´e conveniente distinguir sinais de E/S. As sa´ıdas s˜ao, em parte, determinadas pelas entradas. Na maioria dos casos, as sa´ıdas tamb´em s˜ao afetadas por outros sinais, denominados de perturba¸c˜oes ou ru´ıdo (Lennart, 1999). A rela¸c˜ao entre estas vari´aveis pode ser ilustrada pelo diagrama da Figura1.1, em que u representa o sinal de entrada, y o sinal de sa´ıda e d o sinal de perturba¸c˜ao.
u
−→
↓d
sistema −→y
Figura 1.1 – Rela¸c˜ao entre os sinais de E/S de um sistema.
Neste caso, os modelos s˜ao basicamente equa¸c˜oes diferenciais (no caso cont´ınuo) ou equa¸c˜oes `as diferen¸cas (no caso discreto) que descrevem o comportamento do sistema, podendo ser utilizados na sua simula¸c˜ao ou no dimensionamento de con-troladores. A IS consiste, fundamentalmente, nos seguintes passos (Lennart, 1999), (Pintelon and Schoukens,2012) :
• Recolha dos dados de E/S.
• Sele¸c˜ao da estrutura de modelo entre v´arios candidatos.
• Aplica¸c˜ao de um m´etodo para estimar os valores dos parˆametros do modelo. • Valida¸c˜ao do modelo estimado.
Este trabalho tem especial enfoque na IS lineares, em particular, nos sistemas li-neares e invariantes no tempo (LTI). Utilizar este tipo de sistemas, significa que a rela¸c˜ao entre os sinais de E/S ´e linear e os seus parˆametros n˜ao mudam ao longo do tempo e, por isso, para a mesma entrada, a sa´ıda ser´a a mesma para qualquer instante do tempo.
1.1
M´
etodos Cl´
assicos
Os diferentes algoritmos de IS pressup˜oem um certo tipo de modelo com uma de-terminada parametriza¸c˜ao. Existem diferentes tipos de modelos, sendo contudo os modelos polinomiais — Moving average (MA), Autoregressive (AR), Autoregressive
moving average (ARMA), Autoregressive exogenous (ARX), Exogenous ARMA
(AR-MAX), Output-Error (OE) e Box-Jenkins (BJ) — os mais utilizados pelos m´etodos cl´assicos, tais como os M´ınimos Quadrados (MQ), Vari´aveis Instrumentais e M´etodos do erro de progn´ostico (conhecidos na literatura anglo-sax´onica com Prediction
1.2. M´ETODOS DE SUBESPAC¸ O DE ESTADOS 3
Os m´etodos que determinam os parˆametros de estruturas de modelos parametrizados s˜ao conhecidos como m´etodos param´etricos1. Os m´etodos param´etricos s˜ao t´ecnicas para estimar os parˆametros de determinadas estruturas de modelos. Basicamente, s˜ao formas de encontrar os valores num´ericos dos parˆametros de uma dada estrutura que indiquem a melhor rela¸c˜ao entre a sa´ıda (simulada e prevista) e a sa´ıda medida.
Os m´etodos PEM s˜ao mais precisos para estimar os parˆametros do modelo. Estes m´etodos minimizam um crit´erio quadr´atico do erro de previs˜ao e, por isso, podem ser utilizados para qualquer tipo de estrutura desde que o erro de previs˜ao esteja devidamente parametrizado. No entanto, como no caso geral, o erro de previs˜ao n˜ao ´e uma fun¸c˜ao linear dos parˆametros. O crit´erio quadr´atico poder´a conter v´arios m´ınimos locais para onde o processo de minimiza¸c˜ao poder´a convergir se n˜ao for convenientemente inicializado.
1.2
M´
etodos de subespa¸
co de estados
A escolha de um modelo ´e um processo complicado em IS. No entanto os modelos LTI s˜ao frequentemente usados porque s˜ao simples e podem descrever com precis˜ao adequada a dinˆamica de um grande n´umero de sistemas. Estes modelos do sistema podem ser representados por m´etodos de estado, como ´e o caso do apresentado de seguida:
x(k + 1) = Ax(k) + Bu(k) + w(k),
y(k) = Cx(k) + Du(k) + v(k), (1.1) onde x(k) ∈ Rn ´e o estado, u(k) ∈ Rm ´e a entrada, y(k) ∈ Rl a sa´ıda, com k = 1, . . . , N . A ∈ Rm×n, B ∈ Rn×m, C ∈ Rl×n e D ∈ Rl×m s˜ao os parˆametros e
w(k)∈ Rn e v(k)∈ Rl s˜ao ru´ıdo branco de m´edia nula com covariˆancia conjunta,
E w(k) v(k) ( w(k)T v(k)T ) = Q S ST R . (1.2)
1Os sistemas LTI tamb´em podem ser descritos por modelos n˜ao param´etricos tais como a resposta impulsional e a resposta em frequˆencia. Os m´etodos que estimam estes modelos s˜ao classificados na literatura como m´etodos n˜ao param´etricos (Katayama,2005).
O problema geral da identifica¸c˜ao em subespa¸cos de estados (ISE) consiste em de-terminar, a partir de um conjunto dispon´ıvel de amostras dos sinais de E/S, a ordem
n do sistema e o valor das matrizes [A, B, C, D] do modelo de espa¸co de estados.
Os parˆametros A, B, C e D s˜ao desconhecidos e tˆem de ser identificados fazendo uso apenas dos dados de E/S, que s˜ao sequˆencias do tipo:
{u(k), u(k + 1), . . . , n}
e
{y(k), y(k + 1), . . . , n} .
1.2.1
Porquˆ
e usar m´
etodos de subespa¸
co?
Apesar das t´ecnicas de controlo baseados em modelos de estado terem evolu´ıdo, os m´etodos cl´assicos de IS que identificam modelos de E/S foram desenvolvidos at´e meados do ano de 1980 (Katayama,2005). Mais ou menos nessa altura, descobriu-se que se poderia estimar o estado de um sistema com base em opera¸c˜oes geom´etricas tais como proje¸c˜oes ortogonais e obl´ıquas, sem necessidade do conhecimento do modelo o que levou ao aparecimento das t´ecnicas de ISE.
Na Figura 5.1, vemos no lado esquerdo as caracter´ısticas dos m´etodos de ISE e no lado direito as dos m´etodos cl´assicos.
´
E interessante observar a diferen¸ca entre as duas abordagens: no m´etodo cl´assico, a fun¸c˜ao de transferˆencia ´e primeiro identificada, e s´o depois o modelo de espa¸co de estados ´e obtido por meio de uma realiza¸c˜ao conveniente; atrav´es do modelo de espa¸co de estados, podemos determinar o filtro de Kalman. Nos m´etodos ISE, come¸camos por construir estimativas dos estados atrav´es dos dados de E/S usando ferramentas de ´algebra linear num´erica, onde um modelo de espa¸co de estado ´e ent˜ao obtido atrav´es da solu¸c˜ao de um problema dos MQ. Um elemento chave dos m´etodos de subespa¸co ´e compreender como ´e que os vetores de estado do filtro de Kalman e a matriz de observabilidade estendida s˜ao obtidos pelo uso de ferramentas da ´algebra linear num´erica.
1.2. M´ETODOS DE SUBESPAC¸ O DE ESTADOS 5
baseados na decomposi¸c˜ao em valores singulares (SVD) e na decomposi¸c˜ao QR, n˜ao sendo necess´arias quaisquer t´ecnicas de otimiza¸c˜ao, nem de impor que o sistema se encontre numa dada realiza¸c˜ao. Isto implica que os algoritmos de subespa¸co possam ser igualmente aplicados a todos os sistemas.
Figura 1.2 – M´etodos de subespa¸cos e cl´assicos de IS (Katayama,2005).
1.2.2
Identifica¸
c˜
ao em subespa¸
cos de estados
Na sec¸c˜ao anterior foi definido que uma das ideias chave da identifica¸c˜ao em su-bespa¸cos ´e a da importˆancia do estado para o processo de identifica¸c˜ao, pois de facto, enquanto que na identifica¸c˜ao cl´assica as estimativas do filtro de Kalman s˜ao obtidas apenas depois da estima¸c˜ao das matrizes do sistema, na identifica¸c˜ao em subespa¸cos tem-se a ordem inversa: a sequˆencia de estados do filtro de Kalman ´e determinada primeiro a partir dos dados de E/S, sem qualquer conhecimento pr´evio do modelo. Uma vez conhecida a sequˆencia de estados, o problema de identifica¸c˜ao passa a ser um problema linear de MQ em termos das matrizes desconhecidas do espa¸co de estados. Uma vez que a sequˆencia de estados pode ser calculada usando as ferramentas de ´algebra linear num´erica, as implementa¸c˜oes destes algoritmos s˜ao numericamente eficientes e robustas, sendo, por isso, adequadas a sistemas e conjun-tos de dados de elevada dimens˜ao. A ISE pode ser usada na IS de sistemas MIMO,
evitando-se, desta forma, o problema de longos tempos de execu¸c˜ao `a medida que o n´umero de parˆametros aumenta.
´
E importante salientar que os algoritmos de ISE possuem dois passos principais. No primeiro passo ´e determinada uma base, a partir dos dados de E/S, para o subespa¸co gerado pelas colunas de uma certa matriz, denominada de ”matriz de observabilidade estendida”. A base, tal como aquele subespa¸co, tem dimens˜ao n, que por conseguinte ´e a ordem do sistema a ser identificado.
No segundo passo, s˜ao estimadas as matrizes do sistema, em que para tal existem varia¸c˜oes de m´etodos, nomeadamente usa-se a matriz de observabilidade estendida e a proje¸c˜ao das matrizes de dados.
1.3
Metodologia adotada nesta disserta¸
c˜
ao
Este trabalho tem um caracter pedag´ogico com vista ao desenvolvimento de uma
toolbox com um painel ´unico que contenha os diferentes conceitos de ISE de uma forma integrada.
Para tal ser´a necess´ario introduzir alguns conceitos de ´algebra linear, imprescind´ıveis `
a compreens˜ao dos m´etodos de subespa¸co estudados.
1.4
Motiva¸
c˜
ao e contribui¸
c˜
oes da disserta¸
c˜
ao
A atual crescente competitividade do mercado gera a necessidade do desenvolvi-mento de produtos cada vez mais elaborados, com maiores capacidades de produ¸c˜ao, desempenho e fiabilidade e mais imunes a perturba¸c˜oes que interfiram na qualidade do produto final.
Deste modo a ISE assume especial importˆancia pois tem como principal objetivo es-timar modelos precisos e flex´ıveis capazes de servirem de suporte ao desenvolvimento de sistemas de controlo de alto desempenho. A ISE de sistemas lineares possui um vasto leque de m´etodos que se poder˜ao compilar em algoritmos que se baseiam no estado como chave da identifica¸c˜ao.
1.5. PRINCIPAIS OBJETIVOS DO TRABALHO 7
Esta disserta¸c˜ao, focada na ISE, tem como objetivo construir um suporte l´ogico para IS que vise implementar algoritmos de constru¸c˜ao de modelos de estados, lineares e n˜ao lineares, em malha aberta. Estes algoritmos tˆem grande aplicabilidade, pois existem muitos problemas do mundo real cuja solu¸c˜ao poder´a ser obtida atrav´es destes modelos, como ´e, por exemplo, a dete¸c˜ao de fugas e o controlo de redes de g´as.
Para testar os algoritmos utilizar-se-˜ao dados simulados e dados reais, para todos os sistemas.
1.5
Principais objetivos do trabalho
Esta disserta¸c˜ao, visa a viabilidade da toolbox desenvolvida, Subspace
Identifica-tion Tool (SIT), com vista `a sua utiliza¸c˜ao em identifica¸c˜ao de subespa¸cos, com o desenvolvimento necess´ario das seguintes tarefas:
• Familiariza¸c˜ao inicial com o tema e recolha de bibliografia.
• Familiariza¸c˜ao com os m´etodos de subespa¸co de estados e cl´assicos de IS. • Estudo da toolbox de IS do Matlab atrav´es de exemplos, tendo em vista o
projeto de controladores.
• Implementa¸c˜ao, em Matlab, de m´etodos de identifica¸c˜ao de modelos de estado
lineares discretos com vista `a implementa¸c˜ao de uma toolbox.
• Implementa¸c˜ao de m´etodos para o caso determin´ıstico, estoc´astico e
deter-min´ıstico-estoc´astico na mesma toolbox.
• Identifica¸c˜ao de alguns sistemas utilizando o(s) m´etodo(s) implementado(s),
com vista ao seu estudo e posterior discuss˜ao de resultados.
1.6
Estrutura da disserta¸
c˜
ao
Nesta sec¸c˜ao explicamos como esta disserta¸c˜ao se encontra estruturada e como os diferentes cap´ıtulos se relacionam entre si. Desta forma, esta disserta¸c˜ao encontra-se
organizada em seis cap´ıtulos.
No presente cap´ıtulo fez-se uma introdu¸c˜ao de enquadramento do tema e apresentou-se a motiva¸c˜ao e os objetivos do trabalho.
A primeira parte compreende o Cap´ıtulo 2, o qual cont´em todos os conceitos fun-damentais, nomeadamente, todos os conceitos fundamentais da ´Algebra Linear ne-cess´arios `a compreens˜ao dos m´etodos de ISE, constituindo assim uma base para os pr´oximos cap´ıtulos.
O Cap´ıtulo3, retrata toda a descri¸c˜ao dos m´etodos de subespa¸cos de estados, para o caso determin´ıstico, estoc´astico e o combinado determin´ıstico-estoc´astico, onde s˜ao apresentados as propriedades fundamentais de cada sistema.
O Cap´ıtulo 4, trata dos teoremas respetivos a cada m´etodo apresentado no cap´ıtulo anterior, onde est˜ao presentes todas as propriedades que s˜ao importantes para a constru¸c˜ao de algoritmos e, consequentemente, sobre os algoritmos sobre os quais esta disserta¸c˜ao se debru¸cou.
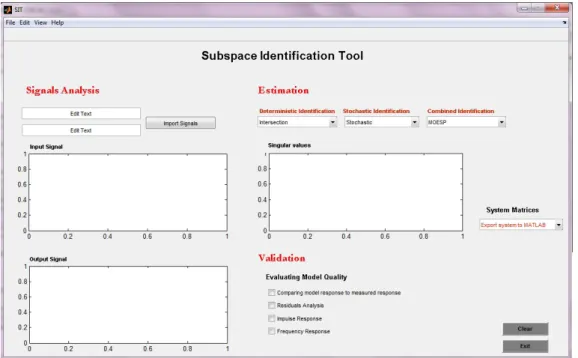
Por sua vez no Cap´ıtulo 5, tratamos da implementa¸c˜ao num´erica dos algoritmos de identifica¸c˜ao em subespa¸cos. Esta implementa¸c˜ao ser´a levada a cabo num ambiente de interface gr´afica de utilizador que fora desenvolvida — SIT. Os conceitos e novas ideias por tr´as dessa implementa¸c˜ao ser˜ao nesse cap´ıtulo esbo¸cados. O SIT, para al´em dos algoritmos de identifica¸c˜ao em subespa¸cos, cont´em uma escala inteira de processamento, e todos os m´etodos necess´arios de valida¸c˜ao.
Finalmente, no Cap´ıtulo6 s˜ao apresentadas as conclus˜oes desta disserta¸c˜ao e ideias de trabalho futuro, uma vez que a pesquisa nos algoritmos de ISE est´a longe de ser uma ´area fechada, e os principais problemas, que foram vistos durante a nossa pesquisa, continuam em aberto.
2
Fundamentos de ´
Algebra
Linear Num´erica
Os m´etodos de ISE s˜ao uma ´area de IS onde se combinam conceitos geom´etricos de ´Algebra Linear com ferramentas num´ericas robustas, introduzindo desta forma ideias inovadoras nunca antes usadas nos m´etodos ”cl´assicos” de IS.
Este cap´ıtulo cont´em uma revis˜ao de t´opicos de ´Algebra Linear e de Teoria de Matrizes em particular, necess´arios `a compreens˜ao de todos os fundamentos te´oricos a apresentar ao longo desta disserta¸c˜ao.
Este cap´ıtulo foi escrito com base no livro (Antsaklis and Michel, 2007).
2.1
Espa¸
cos e subespa¸
cos vetoriais
Iniciamos esta sec¸c˜ao com a no¸c˜ao de espa¸co linear sobre um corpo F , seguindo-se a no¸c˜ao de subespa¸co linear.
Defini¸c˜ao 1 (Corpo). Seja F um conjunto n˜ao singular sobre o qual est˜ao definidas duas opera¸c˜oes, que representamos por ”+” e ”·” e designamos por soma e produto, respetivamente (isto significa que estas opera¸c˜oes s˜ao aplica¸c˜oes de F × F → F ). Ent˜ao, a cada dois elementos α, β ∈ F corresponde um ´unico elemento α + β ∈ F , designado por soma de α com β, e um ´unico elemento α· β ∈ F, designado por
produto de α por β. O termo ordenado (F, +,·) designa-se por corpo (Antsaklis and Michel, 2007, p´ag. 37).
Defini¸c˜ao 2 (Espa¸co linear). Seja V um conjunto n˜ao vazio, definido sobre um corpo (F, +,·), + uma aplica¸c˜ao de V × V → V e · uma aplica¸c˜ao de F × V → V . Os elementos x∈ V s˜ao designados vetores e os elementos de α ∈ F s˜ao designados escalares. Ent˜ao a opera¸c˜ao ”+” ´e designada adi¸c˜ao de vetores e ”·” ´e designada por multiplica¸c˜ao escalar. Ent˜ao para cada x, y∈ V existe um ´unico elemento x+y ∈ V, designado soma de x com y, e para cada x ∈ V e α ∈ F existe um ´unico elemento αx∈ V, designado m´ultiplo de x por α. O termo (V, +, ·) sendo V definido sobre o corpo F designa-se como espa¸co linear se os axiomas seguintes s˜ao satisfeitos:
(i) x + y = y + x para cada x, y ∈ V
(ii) x + (y + z) = (x + y) + z para cada x, y, z ∈ V
(iii) existe um ´unico x∈ V, designado vetor zero e representado por 0V, que verifica
a propriedade 0V + x = x + 0V = x para todo o x∈ V.
(iv) α (x + y) = αx + αy para todo o α∈ F e x, y ∈ V. (v) (α + β) x = αx + βx para todo o α, β ∈ F e x ∈ V. (vi) (αβ) x = α (βx) para todo o α, β ∈ F e x ∈ V. (vii) 0Fx = 0V para todo o x∈ V.
(viii) 1Fx = x para todo o x∈ V.
Quando, a partir do contexto, se torna claro qual o corpo F sobre o qual V est´a definido, falamos simplesmente em espa¸co linear V .
Exemplo 1 (Espa¸co linear). O conjunto dos n´umeros complexos,C, com as opera¸c˜oes usuais, ´e um espa¸co vetorial sobre ele mesmo.
Defini¸c˜ao 3 (Subespa¸co linear). Seja W um subconjunto n˜ao vazio de V se (i) w1+ w2 ∈ W sempre que w1, w2 ∈ W e (ii) αw ∈ W sempre que α ∈ F e w ∈ W.
Exemplo 2 (Subespa¸co linear). Um exemplo simples de um subespa¸co linear deR2,
´
2.1. ESPAC¸ OS E SUBESPAC¸ OS VETORIAIS 11
Observa¸c˜ao 1. Sejam W1, W2 dois subespa¸cos lineares de um espa¸co linear V, ent˜ao
o subespa¸co interse¸c˜ao, W1∩ W2 ´e tamb´em um subespa¸co de V.
Observa-se que o mesmo n˜ao acontece com a uni˜ao de subespa¸cos.
No que se segue, considere-se o conjunto indexado de escalares {α1, . . . , αn} , αi ∈
F, i = 1, . . . , n, e o conjunto indexado de vetores {v1, . . . , vn} , vi ∈ V, i = 1, . . . , n.
2.1.1
Independˆ
encia linear
Nesta sec¸c˜ao revˆeem-se os conceitos de combina¸c˜ao linear, espa¸co gerado e indepen-dˆencia e dependˆencia de vetores.
Defini¸c˜ao 4 (Combina¸c˜ao linear finita). Seja W um conjunto do espa¸co vectorial V (podendo ser finito ou infinito), v diz-se uma combina¸c˜ao linear finita dos vetores de W se, considerando um conjunto finito de elementos de W, {w1, . . . , wn} , e um
conjunto finito de escalares de F, {α1, . . . , αn} , se tem:
v = α1w1+· · · + αnwn.
Defini¸c˜ao 5 (Subespa¸co gerado). Seja W ̸= ∅ um subconjunto de V e S(W ) o
conjunto de todas as combina¸c˜oes lineares finitas dos vetores de W, i.e., w∈ S(W ) se e s´o se existir um conjunto finito de escalares de F ,{α1, . . . , αm} , e um conjunto
finito de vetores de W, {w1, . . . , wm} , tais que w = α1w1 +· · · + αmwm, sendo m
um inteiro positivo. Ent˜ao S(W ) ´e subespa¸co de V, designado subespa¸co gerado pelo conjunto W.
Observa¸c˜ao 2. 1. Seja U um subespa¸co linear de um espa¸co vetorial V, se existir um conjunto W ⊂ V tal que o subespa¸co linear S(W ) coincide com U ent˜ao diz-se que W gera U.
2. S(W ) ´e o mais pequeno dos subespa¸cos de V que cont´em o subconjunto W de V.
3. Sendo U um subespa¸co de V e W ⊂ U, ent˜ao tamb´em S(W ) ⊂ U.
Defini¸c˜ao 6 (Dependˆencia linear). Seja S ={v1, . . . , vm} um conjunto n˜ao vazio do
espa¸co vectorial V. Se existem escalares {α1, . . . , αm} com αi ̸= 0, para pelo menos
Por outro lado, se tivermos∑mj=1ajxj = 0 =⇒ αi = . . . = αm = 0 ent˜ao{v1, . . . , vm}
dizem-se linearmente independentes.
Exemplo 3 (Independˆencia linear). 1. Considere o espa¸co linear (Rn,R) e e1 = [1, 0, . . . , 0]T, e2 = [0, 1, . . . , 0]T, . . . , en = [0, 0, . . . , 1]T. Claramente,∑n
i=1αie i = 0 implica que αi = 0, i = 1, . . . , n. Por isso, o conjunto S = e1, . . . , en ´e
um conjunto de vetores linearmente independentes em Rn sobre o corpo dos
n´umeros reais de R.
2.1.2
Base de um espa¸
co linear
Estamos agora em posi¸c˜ao de definir base de um espa¸co vetorial, bem como de dimens˜ao de um espa¸co vetorial.
Defini¸c˜ao 7 (Base). Um conjunto W dum espa¸co vetorial V ´e uma base de V se:
1. W ´e linearmente independente.
2. O espa¸co gerado por W ´e o pr´oprio espa¸co linear V , i.e., S(W ) = V .
Uma consequˆencia imediata desta defini¸c˜ao ´e o facto de qualquer conjunto linearmen-te independenlinearmen-te, W ⊂ V, ser uma base de S(W ).
Para definir a dimens˜ao de um espa¸co vetorial, V, mostra-se que se V for gerado por um n´umero finito de elementos, ent˜ao existindo outro conjunto de elementos que gere o mesmo espa¸co V , o n´umero de elementos deste conjunto ser´a igual ao do primeiro. Vejamos ent˜ao que se {v1, . . . , vn} for uma base dum espa¸co vetorial, ent˜ao cada v ∈ V se escreve de forma ´unica como combina¸c˜ao linear deste conjunto de vetores, i.e. v = α1v1+· · · + αnvn. Al´em disso, se u1, . . . , um ´e um conjunto de vetores de V linearmente independentes ent˜ao m ≤ n e qualquer base de V possui exatamente n elementos.
Defini¸c˜ao 8 (Dimens˜ao). Seja V um espa¸co vetorial com uma base cujo n´umero de elementos ´e finito ent˜ao V diz-se um espa¸co vetorial de dimens˜ao finita e igual ao n´umero de elementos da base. N˜ao sendo V um espa¸co vetorial de dimens˜ao finita, diz-se um espa¸co vetorial de dimens˜ao infinita.
2.2. SOMA DIRETA DE SUBESPAC¸ OS LINEARES 13
Este resultado permite introduzir o conceito das coordenadas de um vetor. Seja
{v1, . . . , vn} uma base de um espa¸co vetorial V. Ent˜ao v ∈ V ´e representado nessa base por
v = ξ1v1+ . . . + ξnvn, (2.1) tendo-se que os escalares ´unicos {ξ1, . . . , ξn} s˜ao denominadas de coordenadas de v no que diz respeito `a base {v1, . . . , vn}.
Exemplo 4 (Base can´onica). Para um espa¸co linear (Rn,R), com S = {e1, . . . , e n},
onde ei ∈ Rn, i = 1, . . . , n, S ´e uma base para (Rn,R). Tem-se ainda que todo o
vetor v ∈ Rn pode ser associado a um ´unico n– uplo de escalares
αi .. . αn , relativo `a
base {e1, . . . , en} , a que se chama coordenadas de representa¸c˜ao do vetor v na base
S. Doravante, a base S ser´a designada de base natural ou can´onica de Rn.
A base natural do Exemplo 4 tem como propriedade o facto de todos os vetores terem norma unit´aria e serem ortogonais entre si 1. Uma base deste tipo designa-se de base ortonormada.
2.2
Soma direta de subespa¸
cos lineares
Seja V um espa¸co vectorial e W e U dois quaisquer subconjuntos de V. A soma dos conjuntos, denotada por W + U , ´e o conjunto de todos os vetores de V tal que
v = w + u, w∈ W, u ∈ U. Em particular, se W e U forem subespa¸cos lineares de V ,
ent˜ao W + U ´e tamb´em um subespa¸co linear de V.
Mais, ainda se W e U forem subespa¸cos lineares de V e W ∩ V = {0} ent˜ao W e U dizem-se conjuntos disjuntos.
Se W e U s˜ao subespa¸cos lineares de V ent˜ao para cada v ∈ W + U existe um ´unico
w∈ W e um ´unico u ∈ U tal que v = w + u se e s´o se W ∩ V = {0}.
Estendendo estas ideias a um n´umero finito de subespa¸cos de V tem-se que:
1Dois vetores dizem-se ortogonais quando o seu produto interno ´e igual a zero (ver em pormenor na Sec¸c˜ao2.3)
Defini¸c˜ao 9 (Soma direta de subespa¸cos). Sendo V1, . . . , Vr subespa¸cos lineares de
V, sempre que para cada v ∈ V1+· · · + Vr existir um conjunto ´unico de vi ∈ Vi, i =
{1, . . . , r} tal que v = v1+· · · + vr, chama-se soma direta a V1+· · · + Vr e denota-se
por V1⊕ · · · ⊕ Vr.
Defini¸c˜ao 10 (Proje¸c˜ao). Considere-se a soma direta de dois subespa¸cos, i.e., V1⊕
V2, e seja v = v1+ v2, v1 ∈ V1, v2 ∈ V2 a representa¸c˜ao ´unica de v ∈ V. Chama-se
proje¸c˜ao de v em V1 ao longo de V2 `a transforma¸c˜ao linear definida por:
P(v) = v1.
Observa¸c˜ao 3. Tem-se ent˜ao que:
(i) P ∈ L(V, V ) (em que L(V, V ) ´e o espa¸co das transforma¸c˜oes lineares de um espa¸co vectorial nele mesmo (Halmos, 1958) e (Strang, 1988).)
(ii) R(P) = V1.
(iii) N (P) = V2.
No caso geral, tem-se que seP ∈ L(V, V ) ent˜ao P ´e uma proje¸c˜ao em R(P) ao longo deN (P) (ver defini¸c˜ao de R(P) e N (P) na Sec¸c˜ao 2.4.5) se e s´o se PP = P2 =P. Tem-se ent˜ao que:
Defini¸c˜ao 11 (Idempotˆancia). P ∈ L(V, V ) diz-se idempotente se P2 =P.
Outras propriedades:
1. P ´e uma proje¸c˜ao sobre um subespa¸co se e s´o se (I − P) ´e uma proje¸c˜ao. 2. SeP ´e uma proje¸c˜ao sobre em V1 ao longo de V2 ent˜ao (I − P) ´e uma proje¸c˜ao
sobre em V2 ao longo de V1.
3. SeP ´e uma proje¸c˜ao sobre um subespa¸co de V ent˜ao
2.2. SOMA DIRETA DE SUBESPAC¸ OS LINEARES 15
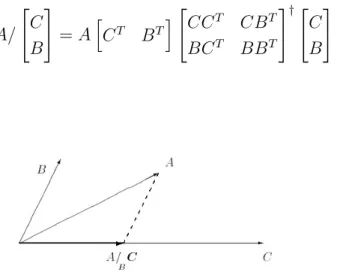
Defini¸c˜ao 12 (Proje¸c˜ao Ortogonal). ΠB define o operador que projeta o espa¸co
linha (ver defini¸c˜ao de espa¸co linha na Sec¸c˜ao 2.4.5) de uma matriz B ∈ Rn×m:
ΠB = BT(BBT)†B, (2.2)
onde† define a pseudo-inversa de Moore-Penrose. A/B ´e abreviatura para a proje¸c˜ao do espa¸co linha da matriz A∈ Rn×n no espa¸co linha da matriz B:
A/B = AΠB
= ABT(BBT)†B. (2.3)
O operador de proje¸c˜ao pode ser interpretado num espa¸co de dimens˜ao j, como ´e indicado na figura seguinte:
Figura 2.1 – Interpreta¸c˜ao da proje¸c˜ao ortogonal num espa¸co de dimens˜ao j (neste caso
j = 2). A/B ´e formado pela proje¸c˜ao do espa¸co linha de A no espa¸co linha de B. Por outro lado, A/B⊥ ´e formado pela proje¸c˜ao do espa¸co linha de A no complemento ortogonal do espa¸co linha de B (Overschee and Moor,1996).
Defini¸c˜ao 13 (Proje¸c˜ao Obl´ıqua). Em vez de decompormos A como combina¸c˜ao linear de duas matrizes ortogonais (B e B⊥), podemos decompor como combina¸c˜ao linear de duas matrizes n˜ao ortogonais B e C e dos complementos ortogonais de B e C. As linhas de uma matriz A s˜ao decompostas como combina¸c˜ao linear das linhas de B e C. Isto pode ser escrito como:
A = LBB + LCC + LB⊥,C⊥ [ C D ]⊥ . (2.4)
A matriz LCC ´e definida como a proje¸c˜ao obl´ıqua do espa¸co linha de A ao longo do
espa¸co linha de B no espa¸co linha de C:
A/BC = LCC. (2.5)
A seguinte figura ilustra a proje¸c˜ao obl´ıqua no espa¸co dimensional j. O nome obl´ıqua refere-se `a dire¸c˜ao da proje¸c˜ao n˜ao ortogonal. A proje¸c˜ao obl´ıqua poder´a ser inter-pretada atrav´es do seguinte enunciado: projetar o espa¸co linha de A ortogonalmente sobre o espa¸co linha de B e C; e decompor o resultado ao longo do espa¸co linha de C. Matematicamente, a proje¸c˜ao obl´ıqua do espa¸co linha de A no espa¸co linha de B e C pode ser estabelecida como:
A/ [ C B ] = A [ CT BT] [CC T CBT BCT BBT ]†[ C B ] (2.6)
Figura 2.2 – Interpreta¸c˜ao da proje¸c˜ao obl´ıqua num espa¸co de dimens˜ao j (neste caso
j = 2). A proje¸c˜ao obl´ıqua ´e formada pela proje¸c˜ao do espa¸co linha de A ao longo do espa¸co linha de B, no espa¸co linha de C (Overschee and Moor,1996).
Defini¸c˜ao 14 (Subespa¸co invariante). Seja T ∈ L(V, V ). Um subespa¸co W ⊂ V
diz-se T –invariante se w ∈ W =⇒ T w ∈ W.
2.2. SOMA DIRETA DE SUBESPAC¸ OS LINEARES 17
(i) V ´e T –invariante. (ii) {0} ´e T –invariante. (iii) R(P) ´e T –invariante. (iv) N (P) ´e T –invariante.
Seja V um espa¸co linear tal que V = W ⊕ V. Se W e U forem ambos subespa¸cos
T – invariantes ent˜ao diz-se que T ´e reduzida por W e U. Usando as defini¸c˜oes
anteriores, verifica-se que T ∈ L(V, V ) ´e reduzida por W e U se e s´o se PT = T P , sendo P uma proje¸c˜ao sobre W ao longo de U.
Exemplo 5. Seja V um espa¸co vetorial de dimens˜ao n e P ∈ L(V, V ). Se P ´e uma proje¸c˜ao ent˜ao existe uma base {v1, . . . , vn} de V cuja matriz P de P relativa a esta
base ´e da forma: P = 1 0 . . . 0 ... 0 1 . . . 0 ... .. . ... ... ... 0 0 0 . . . 1 ... . . . . .. . 0 . . . 0 0 ... ... ... .. . 0 . . . 0 r sendo r = dimR(P).
Seja V um espa¸co vetorial de dimens˜ao n e A ∈ L(V, V ). Seja W um subespa¸co invariante de V e dimens˜ao p tal que V = W ⊕ U. Ent˜ao existe uma base de V `a
qual corresponde a matriz A deA tal que A = A11 ... A12 . . . . . . . . . A21 ... A22 sendo A11 uma matriz quadrada de dimens˜ao p.
2.3
Complemento ortogonal de um conjunto
Seja W um subespa¸co linear do espa¸co vetorial V e considere-se tamb´em
W⊥ ={v ∈ V : (v, w) = 0 para todo o elemento w ∈ W } sendo (v, w) o produto interno 2 de v por w.
Tem-se ent˜ao as seguintes propriedades:
(i) Suponhamos que {w1, . . . , wk} gera W. Ent˜ao v ∈ W⊥ se e s´o se v ⊥ wj, j = 1, . . . , k.
(ii) W⊥ ´e um subespa¸co linear de V.
(iii) n = dimV = dimW + dimW⊥., em que dim se refere `a dimens˜ao.
(iv) (W⊥)⊥ = W. (v) V = W ⊕ W⊥.
(vi) Sejam u, v ∈ V , se u = u1+ u2 e v = v1 + v2 com u1, v1 ∈ W e u2, v2 ∈ W⊥ ent˜ao3 (u, v) = (u1, v1) + (u2, v2) ∥u∥2 = √ ∥u1∥ 2 2 +∥u2∥ 2 2.
2Seja u e v dois vetores de W , define-se como produto interno de u por v e designa-se por (u, v), qualquer aplica¸c˜ao W × W → R com as propriedades que obedecem aos seguintes axiomas (Antsaklis and Michel, 2007, p´ag. 438)
3A norma quadr´atica ´e definida `a custa do produto interno como∥v∥2
2= (v, v) = √
2.4. MATRIZES 19
O subespa¸co WT assim definido designa-se complemento ortogonal do subespa¸co linear W.
Diz-se que dois vetores u e w s˜ao ortogonais segundo um determinado produto interno (u, v) se e s´o se (u, v) = 0.
Exemplo 6 (Complemento ortogonal). Se W = 0V ⊂ V , ent˜ao W⊥ = V . Se
W = V , ent˜ao S⊥ = 0V.
2.4
Matrizes
Na pr´oxima sec¸c˜ao vamos enunciar como ´e que se define a caracter´ıstica de uma matriz e quais os outros aspetos te´oricos que s˜ao importantes nesta disserta¸c˜ao.
2.4.1
Caracter´ıstica de uma matriz
Considere-se uma matriz A = [aij], em que A∈ Rm×n. As linhas desta matriz podem ser encaradas como vetores de Rn: Li = (ai1, ai2, . . . , ain), com i ∈ {1, . . . , m}. Do mesmo modo as colunas da matriz A podem ser encaradas como vetores de Rm : C
j = (aij, a2j, . . . , amj), com j ∈ {1, . . . , n}. Assim consideradas, as linhas e as colunas de A geram subespa¸cos vetoriais de Rn eRm, respetivamente. Chama-se caracter´ıstica de linha (ou caracter´ıstica de coluna) de uma matriz A ∈ Rm×n, e representa-se por rl(A) ou rc(A), respetivamente, a dimens˜ao do subespa¸co vetorial deRm (respetivamente de Rn) gerado pelas m linhas (n colunas) da matriz A. Assim, rl(A) ´e o n´umero m´aximo de linhas linearmente independentes de A, en-quanto que rc(A) ´e o n´umero m´aximo de colunas linearmente independentes de A.
Exemplo 7 (Caracter´ıstica de uma matriz). 1. rc(In) = rl(In) = n, para
qual-quer n∈ N sendo In a matriz identidade de ordem n.
2. A caracter´ıstica de linha e a caracter´ıstica de coluna de uma matriz nula s˜ao claramente iguais a zero.
3. Consideremos a seguinte matriz: A = [ Ir 0 0 0 ] = 1 0 . . . 0 0 . . . 0 0 1 . . . 0 0 . . . 0 . . . 0 . . . . 0 1 . . . 1 0 . . . 0 0 0 . . . 0 0 . . . 0 . . . 0 . . . . 0 0 . . . 0 0 . . . 0
i.e., a matriz do tipo m× n com elementos sobre o corpo R cujas r primeiras colunas (1 ≤ r < n) s˜ao os primeiros r vetores da base can´onica de Rm e as
restantes colunas s˜ao nulas. Tem-se que rc(A) = r = rl(A).
A caracter´ıstica de linha (o mesmo para a de coluna) de uma matriz n˜ao se altera quando nela se efetua qualquer opera¸c˜ao elementar de matrizes, como a troca de linhas (ou colunas), multiplica¸c˜ao de uma linha (ou coluna) por um escalar n˜ao nulo e a adi¸c˜ao a uma linha (ou coluna) de uma outra linha (ou coluna) previamente multiplicada por um qualquer escalar.
Seja, agora, f : E → E′ uma aplica¸c˜ao linear entre espa¸cos vetoriais de dimens˜ao fi-nita, representada em rela¸c˜ao a bases previamente fixadas pela matriz A∈ Mm×n(K). Ent˜ao a caracter´ıstica da matriz A, designada por r(A), ´e igual `a dimens˜ao do espa¸co imagem de f.
2.4.2
Equivalˆ
encia e semelhan¸
ca de matrizes
Uma transforma¸c˜ao linearA de um espa¸co vetorial V de dimens˜ao finita num espa¸co vectorial W, tamb´em de dimens˜ao finita, pode ser representada atrav´es de diferentes matrizes, dependendo da escolha de bases particulares em V e W . A escolha da base, em diferentes casos, resulta em diferentes matrizes, as quais s˜ao f´aceis ou dif´ıceis de utilizar. Muitas das resultantes formas das matrizes standard, que surgem, s˜ao denominadas de formas can´onicas.
SejaA ∈ L(V, W ) e {v1, . . . , vn} e {w1, . . . , wm} bases de V e W , respetivamente. A ´
2.4. MATRIZES 21
base de V e a matriz de representa¸c˜ao de{¯v1, . . . , ¯vn} em rela¸c˜ao a {v1, . . . , vn} ´e P . Outra base para W ´e{ ¯w1, . . . , ¯wm} e Q ´e a matriz de representa¸c˜ao de { ¯w1, . . . , ¯wm} em rela¸c˜ao a{w1, . . . , wm} . A ´e a matriz de A relativamente `as bases {¯v1, . . . , ¯vn} e
{ ¯w1, . . . , ¯wm}. Tem-se ent˜ao que:
A = Q−1AP. (2.7)
Defini¸c˜ao 15 (Equivalˆencia de matrizes). Uma matriz A, de dimens˜ao m×n, diz-se ser equivalente a uma matriz A, de igual dimens˜ao, se existir uma matriz Q n˜ ao-singular e de dimens˜ao m× m e uma matriz P , de dimens˜ao m × m, tal que (2.7)
se verifica. Se A ´e equivalente a A, tem-se que A∼ A.
Exemplo 8 (Como obter a matriz P ). Seja V =R3, F = R e a = [1, 2, 3]T ∈ R3. {v1, v2, v3} = {e1, e2, e3} define a base natural ou can´onica para R3. Claramente, as
coordenadas de α em rela¸c˜ao `a base natural s˜ao α1 = 1, α2 = 2 e α3 = 3, α = [α1, α2, α3]
T
. {¯v1, ¯v2, ¯v3} ´e outra base para R3, tal que por ¯v1 = [1, 0, 1]T, ¯v2 = [0, 1, 0]T e ¯v3 = [0, 1, 1]T. Atrav´es das rela¸c˜oes:
¯ v1 = [1, 0, 1]T = p11v1+ p21v2+ p31v3 = p11 1 0 0 + p21 0 1 0 + p31 0 0 1 ,
o que implica que p11= 1, p21 = 0, p31= 1. ¯ v2 = (0, 1, 0)T = p12v1+ p22v2+ p32v3 = p12 1 0 0 + p22 0 1 0 + p32 0 0 1 ,
o que implica que p12= 0, p21 = 1, p31= 0. ¯ v3 = (0, 1, 1)T = p13v1+ p23v2+ p33v3 (2.8) = p13 1 0 0 + p23 0 1 0 + p33 0 0 1 , (2.9)
o que implica que p13 = 0, p23 = 1, p33 = 1. A matriz P = [pij], de base ¯v1, ¯v2, ¯v3 ´e,
por isso, determinada por
1 0 0 0 1 1 1 0 1
e as coordenadas ¯α de a na base {¯v1, ¯v2, ¯v3}, s˜ao dadas por
¯ α = P−1α = 1 0 0 0 1 1 1 0 1 −1 1 2 3 = 1 0 0 1 1 −1 −1 0 0 1 2 3 = 1 0 2 .
Seja V = W e A ∈ L(V, V ). Seja {v1, . . . , vn} uma base de V e A a matriz de
A correspondente `a base {v1, . . . , vn}. Seja {¯v1, . . . , ¯vn} uma outra base de V cuja matriz correspondente `a base{v1, . . . , vn} ´e P. Seja eA a matriz deA correspondente `
a base {¯v1, . . . , ¯vn}. Ent˜ao
e
A = P−1AP.
Defini¸c˜ao 16 (Matrizes semelhantes). Uma matriz eA de dimens˜ao n× n diz-se semelhante a uma outra matriz A de igual dimens˜ao se existir uma matriz n˜ao singular P, tamb´em com a mesma dimens˜ao, que verifique eA = P−1AP.
Se eA ´e similar a A ent˜ao tamb´em A ´e similar a eA e tem-se A = P−1AP.e
A rela¸c˜ao de semelhan¸ca entre matrizes ´e uma rela¸c˜ao de equivalˆencia.
Seguidamente tem-se que se A ´e uma matriz de dimens˜ao n× n e semelhante a B, ent˜ao demonstra-se que Ak ´e semelhante a Bk, onde k ´e um inteiro positivo, i.e.,
Bk = P−1AkP .
Este resultado pode ser estendido considerando
f (λ) = m ∑ i=0 αiλi = α0+ α1λ + . . . + αmλm (2.10) o que verifica f (P−1AP ) = P−1f (A)P, (2.11) onde α0, . . . , αm ∈ F.
2.4. MATRIZES 23
Isto mostra que se B ´e semelhante a A, ent˜ao f (B) ´e semelhante a f (A), sendo a transforma¸c˜ao de semelhan¸ca P igual em ambos os casos. Al´em disso, se A ´e semelhante a A, sendo f (λ) dado em (2.10) ent˜ao f (A) = 0 se e s´o se f (A) = 0.
SejaA ∈ L(V, V ) e A ´e uma matriz de A em rela¸c˜ao a uma base {v1, . . . , vn} em V. Seja f (λ) o polin´omio dado em (2.10) f (λ) e A como sendo qualquer matriz de A, ent˜ao ´e imediatamente verific´avel que f (A) = O se e s´o se f(A) = 0.
Podemos tirar vantagem destes resultados. Por exemplo, se A definir uma matriz
di-agonal, A = λ1 0 0 . . . 0 0 0 λ2 0 . . . 0 0 . . . . . . . . . . 0 0 0 . . . λn−1 0 0 0 0 . . . 0 λn , tem-se que Ak= λk 1 0 0 . . . 0 0 0 λk 2 0 . . . 0 0 . . . . . . . . . . 0 0 0 . . . λkn−1 0 0 0 0 . . . 0 λk n Substituindo A na express˜ao (2.10) tem-se:
f (A) = α0 1 0 . . . . 0 0 1 . . . . 0 . . . . 0 0 . . . 1 0 0 0 . . . 0 1 + α1 λ1 0 . . . . . . 0 0 λ2 . . . . . . 0 . . . . . . . . . . 0 0 . . . λn−1 0 0 0 . . . 0 λn +· · · +αm λm1 0 . . . . . . 0 0 λm 2 . . . . . . 0 . . . . . . . . . . . . . 0 0 . . . λmn−1 0 0 0 . . . 0 λmn = f (λ1) 0 . . . . . . 0 0 f (λ2) . . . . . . 0 . . . . . . . . . . . . . . . 0 0 . . . f (λn−1) 0 0 0 . . . 0 f (λn)
Como A ∈ L(V, V ), A ´e a matriz A em rela¸c˜ao `a base {v1, . . . , vn} em V , A ´e a matriz de A relativamente `a base {¯v1, . . . , ¯vn} tamb´em em V . Ent˜ao ´e facilmente verificado que det(A) = det(A). Deste segue-se que para qualquer duas matrizes semelhantes A e B, se tem que det(A) = det(B).
Tendo em conta estes resultados, n˜ao h´a ambiguidade na defini¸c˜ao de determinante de uma transforma¸c˜ao linear A de um espa¸co vetorial V em torno de V como determinante de qualquer matriz A, i.e, det(A) = det(A).
2.4.3
Valores e vetores pr´
oprios
Nesta subsec¸c˜ao, V ´e definido como um espa¸co vectorial de dimens˜ao n sobre um corpo F. Assumindo novamenteA ∈ L(V, V ) e a existˆencia dos conjuntos de vetores
{v1, . . . , vn} e {¯v1, . . . , ¯vn}, os quais s˜ao bases de V , ent˜ao tem-se que
¯ v1 = Av1 = λ1v1 ¯ v2 = Av2 = λ2v2 .. . ¯ vn = Avn = λnvn,
onde λi ∈ F, i = 1, . . . , n. Se este ´e o caso, ent˜ao a matriz A de A em rela¸c˜ao `as
bases dadas ´e A = λ1 0 λ2 . . . . 0 λn .
O que motiva o seguinte resultado: para A ∈ L(V, V ) e λ ∈ F , o conjunto de todos os vetores v∈ V , tal que
Av = λv, (2.12)
´
e um espa¸co linear de V. De facto, este ´e o espa¸co nulo da transforma¸c˜ao linear (A − λI), onde I ´e o elemento identidade de L(V, V ). Tem-se ent˜ao
Nλ = v∈ V : (A − λI)v = 0. (2.13)
Estamos agora em condi¸c˜oes de definir importantes conceitos.
Defini¸c˜ao 17 (Valor pr´oprio e vetor pr´oprio). Todo o escalar λ para o qual Nλ
contenha mais do que o vetor nulo ´e designado valor pr´oprio de A (i.e., se existir um v̸= 0 tal que Av = λv). Sendo λ um valor pr´oprio de A, ent˜ao cada v ̸= 0 em Nλ ´e designado vetor pr´oprio de A correspondente ao valor pr´oprio λ. `A dimens˜ao
do subespa¸co linear Nλ chama-se multiplicidade (geom´etrica) do valor pr´oprio λ. Se
a dimens˜ao do subespa¸co linear Nλ ´e 1, ent˜ao λ diz-se um valor pr´oprio simples.
2.4. MATRIZES 25
Seja A uma matriz de dimens˜ao n× n, cujos elementos pertencem ao corpo F , se existir λ ∈ F e um vector n˜ao nulo α ∈ F tal que
Aα = λα, (2.14)
ent˜ao λ diz-se valor pr´oprio de A e α ´e designado vetor pr´oprio de A em rela¸c˜ao ao valor pr´oprio λ.
Tem-se que se A ∈ L(V, V ) e A ´e a matriz de A em rela¸c˜ao `a base {v1, . . . , vn} , ent˜ao λ ´e um valor pr´oprio deA se e s´o se λ ´e um valor pr´oprio de A. Mais ainda, se
v ∈ V ´e um vector pr´oprio de A, cujas coordenadas em rela¸c˜ao `a base {v1, . . . , vn} s˜ao o vetor α, ´e um vetor pr´oprio de A em rela¸c˜ao a λ.
Observe-se que se v (ou α) ´e um vetor pr´oprio deA ou (A), ent˜ao qualquer m´ultiplo n˜ao nulo de v (ou α) ´e tamb´em um vetor pr´oprio de A (ou A).
No caso das matrizes, no lugar de (2.14), pode tamb´em considerar-se a rela¸c˜ao
αA = λα, (2.15)
onde α define um vetor linha 1× n.
Neste contexto, α em (2.14) e α em (2.15) dizem-se um vetor pr´oprio `a direita e um vetor pr´oprio `a esquerda, respetivamente.
Tendo-seA ∈ L(V, V ) e A define a matriz de A em rela¸c˜ao `a base {v1, . . . , vn} em V , ent˜ao λ∈ F ´e um valor pr´oprio de A (e, portanto de A) se e s´o se (det(A−λI) = 0), ou equivalente se e s´o se (det(A − λI) = 0).
2.4.4
Polin´
omio caracter´ıstico
O seguinte resultado permite determinar os valores pr´oprios de A (ou A) numa maneira sistem´atica. Com efeito, examina-se a equa¸c˜ao
ou equivalentemente a seguinte equa¸c˜ao det(A− λI) = a11− λ a12 . . . a1n a21 a22− λ . . . a2n . . . . . . . . . . . . an1 an2 . . . ann− λ (2.17)
A expans˜ao do determinante (2.17) origina um polin´omio em λ de grau n. Para λ ser um valor pr´oprio de A (ou A) deve satisfazer (2.16) ou (2.17) e pertencer a F. De salientar que no geral n˜ao se tem garantia que um polin´omio de grau n, dado por (2.16), n˜ao tenha quaisquer ra´ızes em F. Um corpo F ´e dito ser algebricamente fechado se para todo o polin´omio p(λ) existe pelo menos um λ∈ F , tal que
p(λ) = 0. (2.18)
Qualquer λ que satisfa¸ca (2.18) ´e designado solu¸c˜ao do polin´omio (2.18).
Tendo A ∈ L(V, V ) e A ´e a matriz de A em rela¸c˜ao `as bases {v1, . . . , vn} de V . Ent˜ao:
1. det(A − λI) = det(A − λI) ´e um polin´omio de grau n no parˆametro λ, i.e., existem os escalares α0, α1, . . . , αn que dependem de A, e tamb´em de A, tal que:
det(A− λI) = α0+ α1λ + α2λ2+ . . . + αnλn, (2.19) definindo-se α0 = det(A) e αn= (−1)n.
2. Os valores pr´oprios de A s˜ao precisamente as ra´ızes da equa¸c˜ao
det(A− λυ) = det(A − λυ) = α0+ α1λ + α2λ2+ . . . + αnλn= 0. (2.20)
3. A tem no m´aximo n valores pr´oprios distintos.
A (2.19) chama-se polin´omio caracter´ıstico de A (ou de A) e chama-se a (2.20) a equa¸c˜ao caracter´ıstica de A (ou de A).