Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
Método da Regressão Linear Múltipla Aplicado na Calibração de Sensores
Inerciais
Multiple Linear Regression Method Applied in Calibration of Inertial Sensors
DOI:10.34117/bjdv6n10-096
Recebimento dos originais:08/09/2020 Aceitação para publicação:06/10/2020
Camille Toscano Duarte
Bacharel
Endereço:Rua Dr. Herotides de Oliveira, 44, Niterói, Brasil E-mail:camille.toscano@hotmail.com
Pedro Cunha Campos Roquette
Doutorado
Instituto de Pesquisas da Marinha – IPqM Endereço: Rua Ipiru, 02, Ilha do Governador, Brasil
E-mail:pedroroquette2013@gmail.com
Carlos Renato Caputo Durão
Doutorado
Instituto de Pesquisas da Marinha – IPqM Endereço: Rua Ipiru, 02, Ilha do Governador, Brasil
E-mail:renatodurao@yahoo.com.br
Kátia Goretti de Lima
Mestrado
Instituto de Pesquisas da Marinha – IPqM Endereço: Rua Ipiru, 02, Ilha do Governador, Brasil
E-mail:katiagorettilima@gmail.com
Raquel Lima Oliveira
Doutorado
Universidade Estácio de Sá
Endereço: Rua Eduardo Luiz Gomes, 134, Niterói, Brazil E-mail:quell_2008@yahoo.com.br
RESUMO
Sistemas de Navegação Inercial (SNI) usam acelerômetros e giroscópios como principais sensores. Em um SNI, o cálculo da posição, velocidade e rumo de um veículo é realizado através do processamento dos sinais dos giroscópios e acelerômetros em um conjunto de equações diferenciais associados a matrizes de transformação de coordenadas. O desenvolvimento de tecnologias como fibra óptica, laser e sistemas MicroEletroMecânicos (MEMS), aliado ao GPS, tornaram populares esses sistemas de navegação e permitiram sua utilização em qualquer aplicação na qual informações de velocidade e posição são necessárias. Entretanto, o desempenho de um SNI depende da qualidade
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
dos sensores usados. Uma boa calibração, portanto, melhora a exatidão das leituras dos sensores inerciais e consequentemente o desempenho do SNI. O trabalho desenvolvido apresenta o estudo de um procedimento de calibração de acelerômetros e giroscópios além de um estudo sobre aplicações do método de Regressão Linear Múltipla nesta calibração. A aplicação do método nos modelos dos sensores inerciais resultou na melhoria dos seus sinais e, consequentemente, no desempenho do SNI.
Palavras cahves:Sensores inerciais, calibração de acelerômetros, calibração de giroscópios.
ABSTRACT
Inertial Navigation Systems (NIS) use accelerometers and gyroscopes as main sensors. In a NIS, the calculation of a vehicle's position, velocity and heading is performed by processing the signals from gyros and accelerometers into a set of differential equations associated with coordinate transformation matrices. The development of technologies such as fiber optics, laser and MicroEletroMechanical Systems (MEMS), together with GPS, made these navigation systems popular and allowed their use in any application where speed and position information are required. However, the performance of a NIS depends on the quality of the sensors used. A good calibration therefore improves the accuracy of the inertial sensor readings and consequently the performance of the NIS. The work developed presents the study of a calibration procedure for accelerometers and gyroscopes in addition to a study on applications of the Multiple Linear Regression method in this calibration. The application of the method in the inertial sensor models resulted in the improvement of their signals and, consequently, the performance of the NIS.
keywords: Inertial sensors, accelerometer calibration, gyro calibration.
1 INTRODUÇÃO
Sistemas de navegação que obtêm informações a partir de redes de satélites enfrentam problemas como a frequente perda de sinal. Uma alternativa é o uso de sistemas de navegação inercial (SNI), que não precisam de informações externas para fornecer os dados de navegação. Eles fornecem parâmetros como velocidade, posição, rumo e atitude do veículo a partir da integração dos sinais de saída dos acelerômetros e giroscópios. Entretanto, o desempenho desse sistema depende da qualidade dos sensores usados, e os acelerômetros e giroscópios, como qualquer sensor, apresentam erros nas suas medidas que precisam ser estimados e compensados.
O presente artigo descreve primeiro a modelagem matemática dos acelerômetros e giroscópios e em seguida mostra a aplicação de um procedimento de calibração desses sensores inerciais para determinar os parâmetros dos seus modelos para uso em sistemas de navegação inercial. A metodologia descrita para essa caracterização é fundamentada na regressão linear múltipla.
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
O artigo termina com algumas análises e discussões sobre a melhora no desempenho dos sensores inerciais e, consequentemente, no desempenho do navegador depois da aplicação do método de regressão múltipla.
2 MODELO DOS SENSORES INERCIAIS
Os modelos de transdução dos acelerômetros relacionam os valores de entrada e saída desses sensores. Assim, os modelos desses sensores relacionam, respectivamente, os sinais medidos, acrescidos de erros, com as reais acelerações lineares do veículo. Os principais componentes de erros são fator de escala, bias, desalinhamento e ruído.
Para melhor conhecimento, os modelos de transdução apresentados no presente artigo são de sensores com a saída dos dados digitalizados, que não precisam de conversão para unidades de engenharia, o que resulta em um modelo simplificado. O modelo dos acelerômetros é mostrado, na Eq. (1).
Sendo aLx a aceleração lida pelo sensor no eixo x; kAx o fator de escala do acelerômetro do
eixo x; ax, a aceleração no eixo x materializada na carcaça da UMI; aBx aceleração de bias do
acelerômetro x; α desalinhamentos entre os eixos do bloco e o eixo de leitura do acelerômetro x; e WAx o ruído no eixo x.
A aceleração ax é a informação do sensor inercial que será integrada no algoritmo de
navegação. Para obtê-la a partir das leituras dos sensores, os parâmetros dos modelos de transdução precisam ser estimados.
3 ESTIMATIVA DOS PARÂMETROS
A regressão múltipla é aplicada para estimar os parâmetros do modelo de transdução dos acelerômetros.
Na Eq. (1), aLx é a variável dependente; ax, ay, az são as variáveis independentes e conhecidas;
kAx, aBx, αAxy, αAxz são os parâmetros que serão estimados; e WAx é o termo estocástico. Então, quando esse modelo é estimado, a componente de ruído WAx é eliminado e a equação fica da seguinte maneira:
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
Visto que o fator de escala kAx multiplica todos os outros parâmetros, faz-se uma mudança
de variáveis. Reescrevendo, tem-se:
Nessa modelagem, ax, ay, az são independentes, entradas reais e conhecidas. A aceleração da
gravidade local é conhecida, assim como o valor da latitude. Uma mesa de teste é montada no laboratório mecanicamente referenciada com a vertical local e a direção norte geográfica. Portanto, quando um acelerômetro é montado sobre esta mesa, é possível calcular o valor da componente da aceleração da gravidade na direção do seu eixo de leitura. âLx é a variável dependente
correspondente à leitura do sensor.
Para estimar os valores dos parâmetros do modelo será usado o método dos mínimos quadrados.
Para uma observação qualquer “i” de um teste, o resíduo é definido segundo a Eq. (4):
Então, a soma do quadrado dos resíduos é:
Para determinar os coeficientes c1, c2, c3 e c4, deriva-se parcialmente L em relação a cada
coeficiente. O sistema de equações resultante é mostrado na Eq. (6), e sua solução fornece as estimativas dos valores dos coeficientes.
Fazendo uma mudança inversa de variáveis, podemos calcular os parâmetros do sensor a serem estimados ao final da calibração (kAx, aBx, αAxy, αAxz).
Depois de levantar os parâmetros e sabendo-se que o resíduo é a diferença entre o valor real e o valor lido, tem-se a leitura do sensor com os erros estimados.
Vale ressaltar que uma UMI possui três acelerômetros e três giroscópios, então o procedimento descrito para a análise do acelerômetro x é repetida para os acelerômetros dos eixos
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
y e z. A análise dos giroscópios é feita de maneira similar, e seu modelo de transdução é apresentado na Eq. (7).
4 MODELO INVERSO
Para os cálculos de velocidade, posição, rumo e atitude do veículo, o que importa no algoritmo de navegação são as acelerações reais (ax, ay, az) e velocidades angulares reais (ωx,ωy,
ωz). Para obter esses valores reais, os modelos de transdução dos sensores com os erros estimados
são agrupados matricialmente, e o modelo inverso é obtido isolando o termo com as acelerações reais, conforme Eq. (8):
O mesmo se aplica para calcular as velocidades angulares reais. Dessa forma,
5 ESTUDO DE CASO
Para avaliar a eficácia do método de regressão múltipla aplicado na calibração de sensores inerciais, realizamos testes estáticos multiposições com uma mesa simuladora de movimentos com uma UMI modelo PRIMUS 300. Essa UMI é composta por três acelerômetros do tipo MEMS com resolução de 100 microgravidade e três giroscópios do tipo HRG com resolução de 1 grau por hora. Os resultados dessas simulações são apresentados nessa seção.
5.1 PROCEDIMENTO DE TESTE
A mesa simuladora de movimentos possui dois eixos de rotação e é usada para posicionar a UMI em 24 ângulos diferentes. Em cada ângulo de posicionamento, cada acelerômetro mede um componente da aceleração da gravidade e cada giroscópio mede um componente da velocidade angular da Terra.
Portanto, os componentes da aceleração da gravidade e da velocidade angular da Terra são as variáveis independentes da modelagem da Regressão Linear e os sinais de leitura dos
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
acelerômetros e giroscópios em cada posição serão as variáveis dependentes com um comportamento estocástico devido ao ruído dos sinais dos sensores.
Para que se conheça com exatidão os valores das acelerações e velocidades angulares em cada posição, é necessário que sejam levantados os valores de g⃗ e “latitude” local. Para isso, a mesa simuladora de movimentos deve ser montada com um de seus eixos alinhado com a direção Leste-Oeste e nivelada com a horizontal local. A resolução de posicionamento nos dois eixos da mesa é de 0,0001º.
Uma vez fixada a UMI, em cada posição de teste, após a estabilização do simulador, são lidos os sinais de aceleração (aLx, aLy, aLz) e velocidade angular (ωLx, ωLy, ωLz) dos sensores. A
aquisição de dados é feita durante dois minutos. Ao final, o software de aquisição cria um arquivo com valores médios e desvios padrões de cada uma das 24 posições correspondendo aos sinais de leitura dos sensores. Esse procedimento é repetido dez vezes para a caracterização estatística das estimativas obtidas.
Através dos ângulos da mesa e sabendo a latitude e o valor da gravidade local, calcula-se os valores referência de aceleração e velocidade angular.
Com esses dados, aplica-se o procedimento descrito na seção 3 para levantamento dos parâmetros dos modelos de transdução dos acelerômetros e giroscópios.
Na Eq. (8), as componentes de aceleração da gravidade em cada posição de teste correspondem a ax, ay e az, e os sinais medidos pelos acelerômetros em cada posição correspondem
a âLx, âLy, âLz.
Na Eq. (9), as componentes de velocidade angular da Terra em cada posição de teste correspondem a ωx, ωy e ωz, e os sinais medidos pelos giroscópios em cada posição correspondem
a ω̂Lx, ω̂Ly, ω̂Lz.
5.2 RESULTADOS
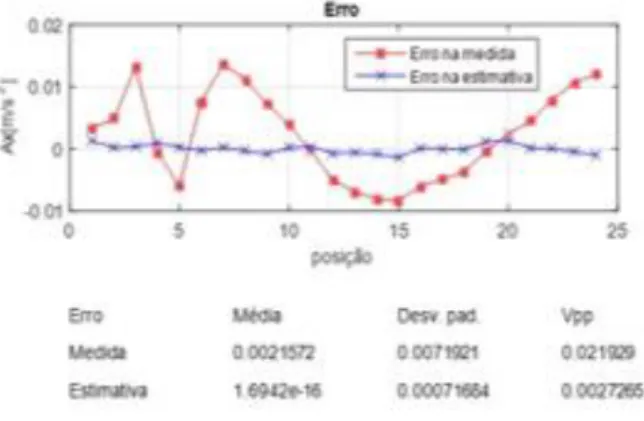
A Fig. 1 (a) apresenta a análise dos resíduos do acelerômetro x antes (erro na medida) e depois da calibração (erro na estimativa). O erro na medida é a diferença entre o valor lido pelo acelerômetro x (aLx) e a aceleração de entrada real (ax), enquanto o erro na estimativa é a diferença
entre o valor lido pelo acelerômetro após a aplicação dos coeficientes de calibração e a aceleração de entrada real.
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
A análise é realizada a partir da média e do desvio padrão dos erros obtidos com a calibração. A média do erro depois da calibração é consideravelmente menor do que a obtida antes da calibração, devido principalmente à correção do bias. O desvio padrão também é menor, o que significa que os dados estão menos dispersos em relação à média.
Resultados semelhantes foram obtidos para os acelerômetros y e z, como mostram as Figuras 1 (b) e (c).
Figure 1 - Resíduo dos acelerômetros: (a) eixo x. (b) eixo y, (c) eizo z
A Fig. 2 (a) apresenta a análise dos resíduos do giroscópio x antes (erro na medida) e depois da calibração (erro na estimativa). O erro na medida é a diferença entre o valor lido pelo giroscópio x (ωLx) e a velocidade angular de entrada real (ωx), enquanto o erro na estimativa é a diferença entre
o valor lido pelo giroscópio após a aplicação dos coeficientes de calibração e a velocidade angular de entrada real.
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
A análise também é realizada a partir da média e do desvio padrão dos erros obtidos com a calibração. Mas, diferente do que é observado nos gráficos dos acelerômetros, os resultados apresentados no gráfico do giroscópio x não indicam uma diferença significativa depois da calibração. Isso se deve ao fato de que as entradas de velocidades angulares são muito pequenas, próximas da intensidade dos ruídos dos giroscópios.
Resultados semelhantes foram obtidos para os giroscópios y e z, como mostram as Figuras 2 (b) e (c).
6 CONCLUSÃO
Verificou-se que o método de regressão linear múltipla pode ser aplicado na calibração de acelerômetros e giroscópios em um procedimento de teste tipo multiposições.
A aplicação dos resultados de calibração utilizando-se o método de regressão linear múltipla resultou na melhora do desempenho dos acelerômetros e giroscópios calibrados, ou seja, diminuiu o erro dos sinais dos sensores inerciais, o que leva a uma melhora no desempenho da UMI e consequentemente uma melhora no navegador, visto que os erros de posição vão propagar-se mais lentamente.
Braz. J. of Develop.,Curitiba, v. 6, n. 10, p. 75363-75371 ,oct. 2020. ISSN 2525-8761
A partir da análise dos resíduos dos sensores no estudo de caso apresentado, foi comprovado que a metodologia é aplicável a esse tipo de modelagem e que o método de regressão múltipla é eficiente.
REFERÊNCIAS
A. DURÃO, C. R. C. Utilização de Unidades de Medidas Inerciais baseadas em Sistemas Microeletromecânicos em Navegadores Integrados. 2009. 183 f. Tese (Doutorado em Engenharia Elétrica), COPPE/UFRJ, Rio de Janeiro, 2009.
B. ROQUETTE, P. C. C. Metodologia para Determinação da Confiabilidade Metrológica de Sistemas Inerciais sob um Perfil Dinâmico Aplicado. 2005. 177 f. Tese (Doutorado em Engenharia)-Departamento de Engenharia Mecânica, PUC, Rio de Janeiro, 2005.
C. ROQUETTE, P.; DURÃO, R. A Methodology for Calculus of Inertial Navigation Parameters Standard Uncertainties. 12th Conference on Integrated Navigation Systems. Saint Petersburg International : SPb: CSRI Electropribor. 2005.
D. IEEE STD-1554: IEEE Recommended Practice for Inertial Sensors Test Equipment, Instrumentation, Data Acquisition and Analysis. Gyro and Accelerometer Panel of the IEEE Aerospace and Electronic Systems Society. 2005.
E. TITTERTON, D.; WESTON, J. Strapdown Inertial Navigation Technology. Eastbourn: Peter Peregrinus Ltd, 1997.