Zarif Meira Gomes
Filtro Ativo Trifásico Shunt com Número
Reduzido de Indutores
Zarif Meira Gomes
Filtro Ativo Trifásico Shunt com Número Reduzido de
Indutores
Dissertação de Mestrado submetido à Coor-denação de Pós-Graduação em Engenharia Elétrica da Universidade Federal da Paraíba - Campus I de João Pessoa como parte dos requisitos necessários para a obtenção do tí-tulo de Mestre em Engenharia Elétrica.
Universidade Federal da Paraíba Ű UFPB
Centro de Energias Alternativas e Renováveis
Departamento de Engenharia Elétrica
Orientador: Professor Isaac Soares de Freitas, Dr. Ing.
Zariff Meira Gomes
Filtro Ativo Trifásico Shunt com Número Reduzido de Indutores/ Zariff Meira Gomes. – João Pessoa, Brasil, 30 de julho de
2015-55 p. : il. ; 30 cm.
Orientador: Professor Isaac Soares de Freitas, Dr. Ing.
Dissertação de Mestrado – Universidade Federal da Paraíba – UFPB Centro de Energias Alternativas e Renováveis
Zarif Meira Gomes
Filtro Ativo Trifásico Shunt com Número Reduzido de
Indutores
Dissertação de Mestrado submetido à Coor-denação de Pós-Graduação em Engenharia Elétrica da Universidade Federal da Paraíba - Campus I de João Pessoa como parte dos requisitos necessários para a obtenção do tí-tulo de Mestre em Engenharia Elétrica.
Trabalho aprovado. João Pessoa, Brasil, 17 de Julho de 2015:
Professor Isaac Soares de Freitas, Dr. Ing.
Orientador
Professor Fabiano Salvadori
Avaliador Interno
Professor Ricardo Ferreira Pinheiro
Avaliador Externo
Agradecimentos
Resumo
Neste trabalho é apresentado um Ąltro ativo de potência trifásico para sistemas a trifásicos a três Ąos com um indutor a menos em comparação com a estrutura usual de um Ąltro ativo shunt. Para a determinação das referências e controle foi utilizada a transformada de Park, ou seja, todo o controle foi feito em eixos síncronos. O Ąltro ativo deste trabalho está na conĄguração paralela funcionando, portanto, como uma fonte de corrente e deverá corrigir o fator de potência e harmônicos de corrente da rede elétrica, estes últimos de forma seletiva. Foram apresentados resultados de simulação validando a estratégia de controle.
Key-words: Filtro ativo de potência, Transformada de Park, Controle Seletivo
Abstract
This work presents an active power Ąlter for three-phase three-wire systems without an inductor when compared to the usual structure of a shunt active power Ąlter. For the determination and control of the references it was used the ParkŠs transformation, it means that all control was done in synchronous axes. The active Ąlter of this work is in parallel conĄguration acting therefore as a current source and should correct the power factor and current harmonics selectively of the power grid. Simulation results were presented validating the control strategy.
Lista de ilustrações
Figura 1 Ű Filtros ativos série e paralelo. . . 3
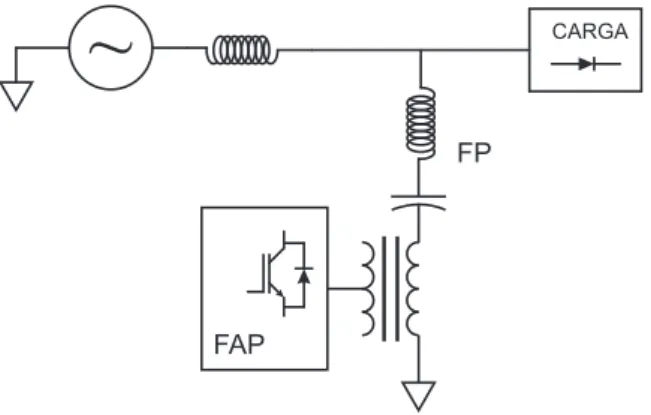
Figura 2 Ű Filtro ativo série com Ąltro passivo paralelo. . . 4
Figura 3 Ű Filtro ativo shunt com Ąltro passivo paralelo. . . 4
Figura 4 Ű Filtros ativos em série com Ąltro passivo. . . 4
Figura 5 Ű Sistema trifásico a três Ąos com inversor shunt . . . 8
Figura 6 Ű Sistema a ser modelado. . . 9
Figura 7 Ű Correntes a serem injetadas no sistema para correção do fator de potência. 11 Figura 8 Ű Grandezas nos eixos genéricos. . . 12
Figura 9 Ű Dedução das correntes �Q1 e �Q3 . . . 13
Figura 10 Ű Diagrama do controlador de tensão do barramento capacitivo. . . 15
Figura 11 Ű Geração dos eixos genéricos � e� na frequência �. . . 16
Figura 12 Ű Transformação para eixos genéricos de frequência �. . . 16
Figura 13 Ű Diagrama de controle para correção do fator de potência. . . 17
Figura 14 Ű Soma das tensões de referência dos controladores. . . 18
Figura 15 Ű Diagrama fasorial do sistema em regime permanente com fator de po-tência corrigido. . . 19
Figura 16 Ű Sistema trifásico a três Ąos com inversor shunt. . . 22
Figura 17 Ű Sistema trifásico a três Ąos com inversor shunt com um indutor a menos. 24 Figura 18 Ű Ripples de corrente do braço central dos FAP com três e dois indutores com mesmo valor de indutância. . . 25
Figura 19 Ű Ripples de corrente do braço central do FAP com três indutores e do FAP com dois indutores duas vezes maiores. . . 26
Figura 20 Ű Efeito do entreferro na saturação do núcleo. . . 27
Figura 21 Ű Tensões e correntes de fase defasadas. . . 32
Figura 22 Ű Tensões e correntes de fase com fator de potência próximo da unidade. 33 Figura 23 Ű Circuito com reativos na fundamental, quinta e sétima harmônicas. . . 33
Figura 24 Ű Corrente no espectro de frequências. . . 34
Figura 25 Ű Circuito com correção da quinta harmônica e fator de potência. . . 34
Figura 26 Ű Corrente do espectro de frequências. . . 35
Figura 27 Ű (Circuito com correção da quinta e sétima harmônicas e fator de potência. 35 Figura 28 Ű Corrente no espectro de frequências. . . 36
Figura 29 Ű Bancada de experimental. . . 36
Figura 30 Ű Sistema montado em bancada experimental - apenas um dos Ąltros em funcionamento. . . 37
Figura 32 Ű Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental e a quinta harmônica. . . 38 Figura 33 Ű Tensão da rede, corrente da rede, corrente da carga e corrente do
Ąl-tro ativo eliminando os reativos da fundamental, a quinta e a sétima harmônicas. . . 38 Figura 34 Ű Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro
Lista de tabelas
Lista de abreviaturas e siglas
FAP Filtro Ativo de Potência.
PWM Pulse Width Modulation.
DSP Digital Signal Processor.
THD Distorção Harmônica Total (� ���� �������� ����������).
CC Corrente Contínua.
Lista de símbolos
�g Indutância equivalente de rede.
�g Resistência equivalente de rede.
�f Indutância equivalente de Ąltro.
�f Resistência equivalente de Ąltro.
�g1 Corrente da linha 1 da rede elétrica.
�g2 Corrente da linha 2 da rede elétrica.
�g3 Corrente da linha 3 da rede elétrica.
�l1 Corrente da linha 1 da carga.
�l2 Corrente da linha 2 da carga.
�l3 Corrente da linha 3 da carga.
�f1 Corrente do Ąltro da conexão 1.
�f2 Corrente do Ąltro da conexão 2.
�f3 Corrente do Ąltro da conexão 3.
�1 Tensão de fase 1 da rede.
�2 Tensão de fase 2 da rede.
�3 Tensão de fase 3 da rede.
�g1 Tensão de fase 1 da rede.
�g2 Tensão de fase 2 da rede.
�g3 Tensão de fase 3 da rede.
�12 Tensão de linha 12 da rede.
�32 Tensão de linha 32 da rede.
�f1 Tensão gerada pelo Ąltro 1.
�l Tensão de linha da rede.
�il1 Ângulo da corrente de carga 1 em relação ao eixo genérico � da
trans-formada de Park.
�il3 Ângulo da corrente de carga 3 em relação ao eixo genérico � da
trans-formada de Park.
�v12 Ângulo da tensão de linha 12 em relação ao eixo genérico � da
trans-formada de Park.
�v32 Ângulo da tensão de linha 32 em relação ao eixo genérico � da
trans-formada de Park.
�gl11d Corrente de linha da carga 1 no eixo � dos eixos genéricos 1 da
trans-formada de Park.
�gl11q Corrente de linha da carga 1 no eixo � dos eixos genéricos 1 da
trans-formada de Park.
�gl33d Corrente de linha da carga 3 no eixo � dos eixos genéricos 3 da
trans-formada de Park.
�gl33q Corrente de linha da carga 3 no eixo � dos eixos genéricos 3 da
trans-formada de Park.
�12g1d Tensão de linha 12 no eixo� dos eixos genéricos 1 da transformada de
Park.
�12g1q Tensão de linha 12 no eixo � dos eixos genéricos 1 da transformada de
Park.
�32g3d Tensão de linha 32 no eixo� dos eixos genéricos 3 da transformada de
Park.
�32g3q Tensão de linha 32 no eixo � dos eixos genéricos 3 da transformada de
Park.
�vl11d Corrente de linha da carga 1 no eixo � dos eixos da transformada de
Park no referencial da tensao de fase �1.
�v1
l1q Corrente de linha da carga 1 no eixo � dos eixos da transformada de
Park no referencial da tensao de fase �1.
�v3
l3d Corrente de linha da carga 3 no eixo � dos eixos da transformada de
�vl33q Corrente de linha da carga 3 no eixo � dos eixos da transformada de
Park no referencial da tensao de fase �3.
�Q1 Corrente em quadratura com a tensão de fase 1.
�Q3 Corrente em quadratura com a tensão de fase 3.
�gQd1 Corrente em quadratura com a tensão de fase 1 decomposta no eixo �
dos eixos genéricos 1 da transformada de Park.
�gQq1 Corrente em quadratura com a tensão de fase 1 decomposta no eixo �
dos eixos genéricos 1 da transformada de Park.
�gQd3 Corrente em quadratura com a tensão de fase 3 decomposta no eixo � dos eixos genéricos 3 da transformada de Park.
�gQq3 Corrente em quadratura com a tensão de fase 3 decomposta no eixo � dos eixos genéricos 3 da transformada de Park.
�f Corrente de referência a ser absorvida pelo Ąltro para controle de tensão
do barramento.
�˚fg11d1 Corrente de referência do Ąltro ativo 1 no eixo � dos referenciais
gené-ricos 1 da transformada de Park.
�˚fg11q1 Corrente de referência do Ąltro ativo 1 no eixo� dos referenciais
Sumário
1 INTRODUÇÃO . . . . 1
1.1 Contexto . . . 1
1.2 Objetivos . . . 2
1.2.1 Objetivos Gerais . . . 2
1.2.2 Objetivos EspecíĄcos . . . 2
1.3 Revisão BibliográĄca . . . 3
2 MODELO DO SISTEMA . . . . 8
2.1 Equacionamento do Sistema . . . 8
2.2 Variáveis e Controle do Sistema . . . 10
2.2.1 DeĄnição das correntes de referência para correção do fator de potência . . 11
2.2.2 DeĄnição das correntes de referência para controle do barramento capacitivo 15 2.2.3 DeĄnição das correntes de referência para mitigação das harmônicas . . . . 15
2.2.4 Sistema de Controle Geral . . . 16
2.2.5 Análise PWM . . . 18
3 DIMENSIONAMENTO DO FAP . . . 21
3.1 Considerações . . . 21
3.2 Análise em regime permanente . . . 21
3.3 Análise do ripple de corrente . . . 24
3.4 Análise do barramento do inversor . . . 27
4 RESULTADOS . . . 32
4.1 Simulação do Ąltro ativo . . . 32
4.1.1 Simulação do Ąltro ativo corrigindo apenas reativos da fundamental . . . . 32
4.1.2 Simulação do Ąltro ativo corrigindo reativos da fundamental e harmônicos . 33 4.2 Resultados experimentais. . . . 35
5 CONCLUSÕES . . . 40
5.1 Sugestões para trabalhos futuros . . . 40
REFERÊNCIAS . . . 41
1
1 Introdução
1.1 Contexto
Os Filtros Ativos de Potência (FAP) surgiram na década de 70 como alternativa aos usuais Ąltros passivos na correção de distorções da rede elétrica (1, 2). Os FAP têm a capacidade de suprimir harmônicos e/ou reativos de forma dinâmica ao poder trabalhar em malha fechada e se adaptando às variações que possam ocorrer no circuito. Com o aumento das cargas não lineares como conversores a diodos e cicloinversores, os FAP surgi-ram como uma alternativa viável para compensar os reativos, as componentes harmônicas, dentre outros problemas da rede (3, 4).
Harmônicos são causa de diversos problemas na rede elétrica, tanto para o próprio consumidor, como para a concessionária de energia elétrica. Dentre esses problemas, pode-se citar: baixo fator de potência; aumento das correntes de neutro; sobreaquecimento de motores e transformadores; atuação indesejada de dispositivos de proteção; estresse de elementos da rede como banco de capacitores e Ąltros; aumento de tensões neutro-terra; aumento das perdas Joule; aumento de vibrações em equipamentos; mau funcionamento de equipamentos sensíveis; e interferência em sistemas telefônicos e de comunicação inclusive com perda de dados (5, 6).
Os FAP são geralmente classiĄcados conforme sua topologia de circuito de potên-cia, deĄnição das grandezas de referência e conforme as variáveis do sistema compensadas.
Baseado na topologia, encontram-se os Ąltros ativos paralelos, os Ąltros ativos série e as combinações de ambos com Ąltros passivos (Ativo Paralelo/Passivo Série, Ativo Paralelo/Passivo Paralelo, Passivo Paralelo/Ativo Série, etc.). Como variáveis do sistema compensadas encontram-se os Compensadores de Reativos, Compensadores Harmônicos e os de Balanceamento de Fases, sendo comum a combinação dessas características (7, 8).
Os FAPs na conĄguração Série produzem uma tensão que é somada instantane-amente à tensão da rede para manter a forma de onda da tensão senoidal pura sobre a carga crítica, funcionando assim, como uma fonte de tesão em série com a rede. Sendo assim, os FAPs série devem ser projetados para suportar a corrente nominal do circuito e se proteger das correntes de curto-circuito, característica essa que limita sua utilização em aplicações de alta potência. As principais vantagens da conĄguração Série sobre a paralela é que ela é ideal para o balanceamento de fases e compensar reativos na forma de onda da tensão.
Capítulo 1. Introdução 2
uma corrente de referência para corrigir hamônicos de corrente. Portanto, o FAP paralelo funciona como um dual do Ąltro série e não possui grandes problemas relacionados à potência do circuito a ser corrigido, para tanto, o FAP paralelo deve poder fornecer a potência reativa consumida pela carga. Como vantagens do Ąltro paralelo em relação ao série está na possibilidade de implantação em qualquer sistema independentemente da potência pois ele é conectado em paralelo, não precisa abrir o circuito para sua instalação, em caso de defeito ele é de melhor manutenção e corrige os principais problemas rede, pois estes são, em sua maioria, no sinal de corrente do sistema e não no de tensão.
As combinações entre Ąltros série e paralelo é alvo atualmente de diversos estudos (9). É possível encontrar hoje no mercado os chamados Condicionadores UniĄcados de Energia (UPQC - UniĄed Power Quality Conditioner) que unem um Ąltro ativo série (DVR) com um paralelo (Compensador Estático de Distribuição).
Em se tratando de Ąltros paralelos, existem diversas formas de sincronização para obtenção das correntes de referência a serem controladas. Usualmente são utilizadas mé-todos integrativos resultando em um bom comportamento em regime transitório mas com moderada resposta às variações de corrente da carga. Outra forma de sincronização é a utilização da teoria das potências instantâneas o que possibilita uma acomodação mais rápida e precisa ao FAP (3).
Neste trabalho será abordada a conĄguração paralela e serão corrigidos o fator de potência e harmônicos de um sistema trifásico a três Ąos, esses últimos, de forma seletiva. Para isso, será utilizada uma estratégia de controle baseada em eixos síncronos utilizando a transformada de Park. A modelagem e o controle foram validados via simulação em software (Matlab) e bancada experimental.
1.2 Objetivos
1.2.1
Objetivos Gerais
Neste trabalho será modelado um Filtro Ativo de Potência Shunt Trifásico a três Ąos com um indutor a menos em comparação à estrutura usual de Ąltros ativos. Será utili-zada a topologia paralela e serão corrigidos o fator de potência e mitigados hamônicos sele tivamente. A estratégia de controle será baseada na transformação de Park objetivando tornar o FAP versátil e dedicado a problemas especíĄcos.
1.2.2
Objetivos EspecíĄcos
Modelagem do sistema
Capítulo 1. Introdução 3
- Modelagem com um indutor a menos;
- Dimensionamento dos indutores de Ąltro;
- DeĄnição das referências de controle;
- Comparação com a topologia com três indutores;
- DeĄnição dos controladores;
- Simulação do sistema;
- Resultados Experimentais.
1.3 Revisão BibliográĄca
Filtros passivos têm sido largamente utilizados nos últimos anos devido ao seu baixo custo e simplicidade em comparação aos Ąltros ativos (10, 11). Entretanto, eles apresentam diversas desvantagens: a impedância da rede inĆuencia fortemente na Ąl-tragem, aparecimento de ressonância paralela entre o Ąltro e a rede pode acarretar no aumento das componentes harmônicas do sistema e o Ąltro pode entrar em ressonância série com a fonte distorcendo a forma de onda de tensão (11, 12).
Existem dois grandes grupos de classiĄcação de Ąltros ativos: os Ąltros shunt ou paralelo e os Ąltros série. Como mostrado em (13), os Ąltros ativos paralelos são os mais indicados na correção das distorções de corrente quando cargas não-lineares injetam com-ponentes harmônicas de corrente no sistema. Enquanto que os Ąltros ativos série são mais efetivos na correção de distorções nos sinais de tensão elétrica. Seguem ilustrados os Ąltros ativos shunt e série na Figura 1.
Figura 1: Filtros ativos série e paralelo.
Capítulo 1. Introdução 4
rede, os Filtros Ativos de Potência Híbridos (HAPF - Hybrid Active Power Filter). Desta forma, pode-se reduzir a potência total que o Ąltro ativo necessitaria compensar, reduzindo seu tamanho e especiĄcações (14, 12). Em (10) são citadas as três principais topologias de HAPF: Filtro ativo série com Ąltro passivo paralelo, Ąltro ativo shunt com Ąltro passivo paralelo e Ąltros ativos conectados em série com Ąltros passivos como observado nas Figuras 2, 3 e 4. A associação com Ąltros passivos série é amplamente desmotivada pela complexidade na proteção do sistema, maior diĄculdade na instalação e em caso de defeito no Ąltro passivo, ocorrerá a interrupção da alimentação (15).
Figura 2: Filtro ativo série com Ąltro passivo paralelo.
Figura 3: Filtro ativo shunt com Ąltro passivo paralelo.
Figura 4: Filtros ativos em série com Ąltro passivo.
Capítulo 1. Introdução 5
corrente predominantes e os reativos da fundamental, dimiuindo a necessidade de um Ąltro de maior capacidade (17). As principais vantagens da associação shunt-shunt são: a instalação da parte ativa será simples mesmo se Ąltros passivos já tiverem sido instalados; a parte reativa relativa ao Ąltro passivo não Ćuirá através da parte ativa do sistema; e a atenuação e a defasagem causadas pelos Ąltros passivos não existirão mais (15);
A terceira conĄguração é a mais utilizada (10) como feito em (18). Esta topolo-gia elimina a possibilidade de ressonância no sistema e permite a correção de diversos problemas no sinal de tensão e corrente da rede (19).
Em se tratando de Ąltros ativos, há diversas formas de identiĄcar e caracterizar os problema da rede. Para isso, diversas técnicas são utilizadas para detectar os atributos das componentes de frequência das harmônicas como a amplitude, fase, frequência, tempo de duração, energia, etc. De acordo com (20) os métodos de detecção de harmônicas podem ser genericamente classiĄcados como segue na Tabela 1.
Domínio Método
Frequência Transformada Discreta de Fourier; Fast Fourier Transform;
Transformada de Fourier Recursiva Wavelets
Tempo Eixos d e q sincronizados com a fundamental; Integradores genéricos e variações;
Eixos d e q sincronizados com cada harmônica; Teoria das potências instantâneas pq;
Tabela 1: Métodos de Detecção de Harmônicas.
Nas técnicas que utilizam a transformada de Fourier o sinal que se deseja obter (componente fundamental ou harmônicas) é subtraído ainda no domínio da frequência e é utilizada a transformada inversa para obter o sinal desejado no tempo. O atraso devido a amostragem do sinal é, geralmente, o demérito desta técnica (21, 22). Este problema é corrigido com métodos modiĄcados da transformada de Fourier em que a componente fundamental do sinal é priorizada como em (23).
Capítulo 1. Introdução 6
pelo circuito e subtrair essa parte da corrente total obtendo a corrente de referência que ajustará o sistema como feito em (27). Neste trabalho, todo o controle será feito ainda nas componentes síncronas em cada frequência múltipla da fundamental obtendo tensões síncronas a serem aplicadas pelo circuito inversor. Portanto, a transformada de Park não será utilizada apenas para destacar as correntes de referência, mas sim, para o controle de todo o sistema.
Associada à técnica de detecção, em (32) as estratégias de controle são classiĄ-cadas em esquemas de compensação no domínio do tempo e no domínio da frequência. Nelas se destacam as baseadas na transformada de Fourier (domínio da frequência) e as estratégias utilizando as transformadas de Clarke, Park, Teoria �� e por balanceamento de energia (33). Diversos tipos de controladores são utilizados para comandar as chaves de potência do conversor e a modulação por largura de pulso é basicamente a utilizada (32). De acordo com (21) pode-se classiĄcar as estratégias de controle de forma ampla em es-tratégias de malha aberta e eses-tratégias de malha fechada. As eses-tratégias de malha aberta se caracterizam pela injeção de uma quantidade Ąxa de energia reativa para corrigir o fator de potência e/ou harmônicas. Já os Ąltros ativos de malha fechada possuem diversas sub-classiĄcações. Dentre elas, a técnica de capacitor a tesão constante (34, 35, 36) em que um barramento a tensão Ąxa proverá a energia reativa que Ćuirá entre o Ąltro, carga e rede. Um das outras técnicas é de indutor a corrente constante (37). Já em (38) é citado o controle em histerese que apresenta rápida resposta dinâmica e boa robustez (39, 40). Outros controladores utilizados em FAP são os Fuzzy e Controles Adaptativos, como visto em (41) e (42).
Neste trabalho serão utilizados controladores Proporcionais Integrais (PI) utili-zando os eixos síncronos como feito em (3).
Ainda em (38) os Ąltros ativos podem ser classiĄcados de acordo com a escolha de mitigação escolhida. Dentre os principais problemas que podem ser corrigidos com Ąltros ativos estão: distorção harmônica, correção de reativos da componente fundamental, desbalanceamento, correção da corrente de neutro e abaixamentos ou elevações nos níveis de tensão da rede. O principal foco dos Ąltros ativos é a correção de distorções harmônicas seguida da compensação dos reativos da fundamental. Adicionalmente são incluídas as correções do desbalanceamento e afundamentos da tensão. Estes últimos são foco dos Restauradores Dinâmicos de Tensão (DVR - Dynamic Voltage Restorer) que possuem o foco na correção dos problemas da rede para que não afetem uma carga sensível (43, 44, 32).
Capítulo 1. Introdução 7
o conteúdo harmônico típico de retiĄcadores. Ainda como vantagem de compensar sele-tivamente está na frequência de chaveamento poder ser menor o que possibilita utilizar um maior número de chaves de potência, isto é possível pois ao se dedicar um FAP para mitigar harmônicos de baixa frequência, não se faz necessário ter altas frequências de amostragem e de chaveamento. Por exemplo, ao se desejar mitigar harmônicas de alta frequência, como a de ordem 50, se faz necessário que as chavez possam chavear em altas frequência, pois esta harmônica é de 3kHz, ao se utilizar técnicas PWM para a solução do problema, as chaves devem comutar a, pelo menos, 30kHz . Assim sendo, Ąltros ativos menores, mais versáteis e de menor custo podem ser fabricados para solucionar desde problemas localizados com cargas relativamente pequenas a problemas envolvendo cargas maiores.
8
2 Modelo do Sistema
2.1 Equacionamento do Sistema
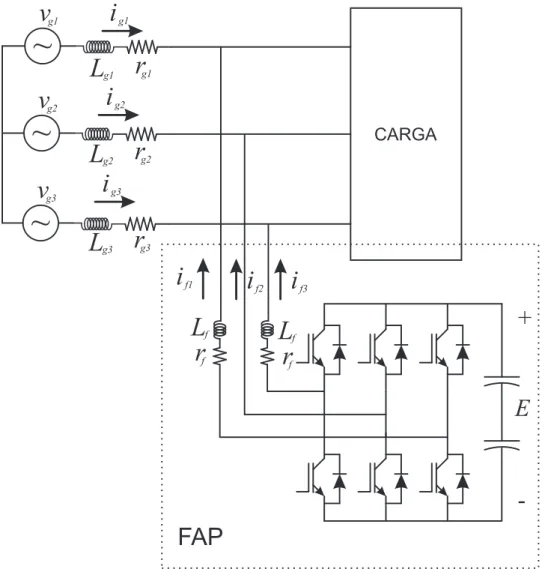
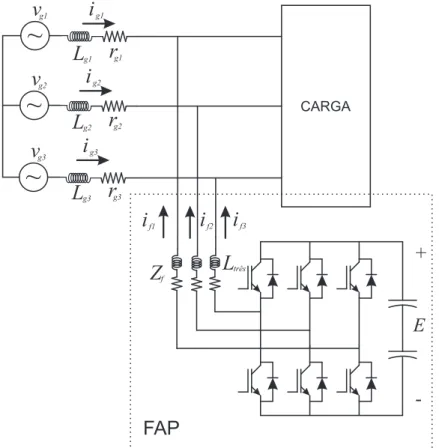
O sistema é composto por um circuito inversor de três braços conectado em shunt com um sistema trifásico a três Ąos que alimenta uma carga conforme Figura 5. É possível observar que há um braço do inversor sem indutância de conexão e que será compartilhado entre dois Ąltros ativos conforme modelo que segue.
Figura 5: Sistema trifásico a três Ąos com inversor shunt
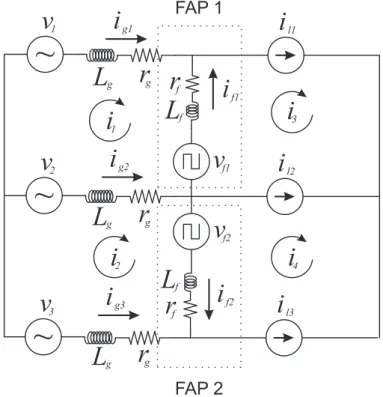
O sistema é modelado como dois Ąltros ativos monofásicos compartilhando um braço como pode ser observado através da Figura 6. Onde�f1 e�f2 são as tensões geradas
pelo circuito inversor trifásico e �f e�f são, respectivamente, a indutância e a resistência
de saída do Ąltro.
Capítulo 2. Modelo do Sistema 9
Figura 6: Sistema a ser modelado.
Malha 1:
�g1´�g1
��1
�� ´�g1�1´�f
�p�1´�3q
�� ´�fp�1´�3q ´�f1´�g1p�1´�2q ´�g1
�p�1 ´�2q
�� ´�g2 “0
(2.1)
Malha 2:
�g2´�g1
�p�2´�1q
�� ´�g1p�2´�1q `�f2´�fp�2´�4q ´�f
�p�2´�4q
�� ´�g1�2´�g1 ��2
�� ´�g3 “0 (2.2)
Malha 3:
�3 “�l1 (2.3)
Malha 4:
�4 “ ´�l3 (2.4)
Substituindo as Equações 2.3 e 2.4 nas Equações 2.1 e 2.2, chega-se a:
p´2�g1´�fq
��1
�� `�f ��l1
�� `�g1 ��2
�� “�g1�1`�f�1´�f�l1`�f1`�g1�1´�g1�2`�g2´�g1 (2.5)
p´2�g1´�fq
��2
�� ´�f ��l3
�� `�g1 ��1
�� “ ´�g2`�g1�2´�g1�1´�f2`�f�2`�f�l3`�g1�2`�g3 (2.6) Sendo:
Capítulo 2. Modelo do Sistema 10
�gf “2�g1`�f (2.8)
Separando os termos, pode-se chegar à equação matricial 2.9:
��
�� ´�� “�1
��
�� `�2� (2.9)
Onde:
�“
«
�gf �g1
�g1 �gf
ff´1«
�gf ´�g1
´�g1 �gf
ff
(2.10)
�1 “
«
�gf �g1
�g1 �gf
ff´1«
´�f 0 0 0 0 0 0
0 �f 0 0 0 0 0
ff
(2.11)
�2 “
«
�gf �g1
�g1 �gf
ff´1«
´�f 0 1 0 ´1 1 0
0 �f 0 ´1 0 ´1 1
ff (2.12) � “ » — — — — — — — — — — — –
´�l1
�l3
�f1
�f2
�g1
�g2
�g3
fi ffi ffi ffi ffi ffi ffi ffi ffi ffi ffi ffi fl (2.13) � “ « �1 �2 ff (2.14)
2.2 Variáveis e Controle do Sistema
Cada Ąltro ativo do sistema será tratado como um Ąltro ativo monofásico e, assim, controlado um independentemente do outro. Com a correção de duas fases do sistema, a terceira será corrigida automaticamente visto que o sistema é trifásico balanceado a três Ąos.
Pelo modelo da Equação 2.9 podem ser obtidas as variáveis de entrada e saída do sistema de controle. Para implementar a técnica de controle proposta, com controle sele-tivo de harmônicas, serão sensoriadas e transformadas para os eixos síncronos as tensões de fase [�12, �32], as correntes da carga [�l1, �l3] e as correntes dos Ąltros [�f1, �f2].
Capítulo 2. Modelo do Sistema 11
o que controla a tensão do barramento e os controladores que mitigam as componentes harmônicas seletivamente.
2.2.1
DeĄnição das correntes de referência para correção do fator de potência
Para a correção do fator de potência da primeira fase do sistema é preciso eliminar a componente da corrente da rede �Q1 que está em quadratura com a tensão de fase �1
como pode ser observada na Figura 7.a. Da mesma forma, para a correção do fator de potência da fase 3, deve-se injetar a corrente�Q3 no sistema para que a rede apenas envie
a parte ativa da corrente de carga como pode ser observado ainda na Figura 7.b.
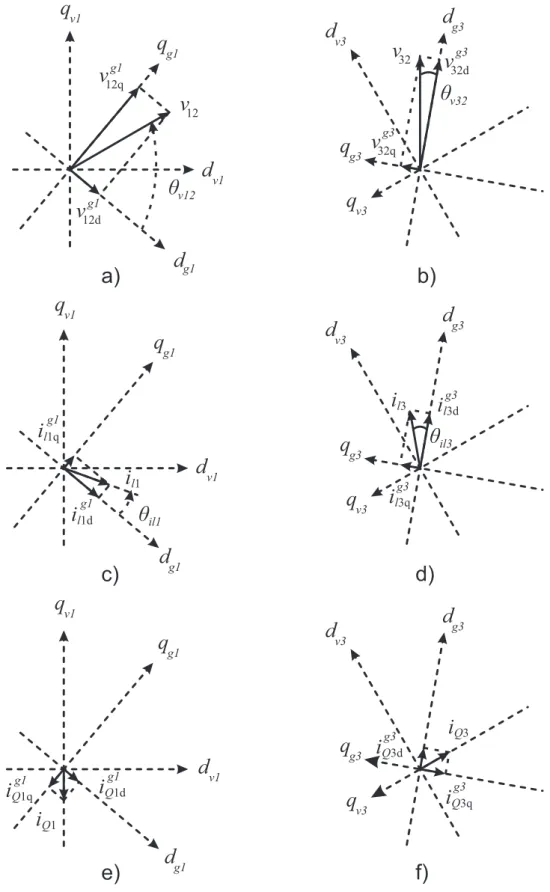
Figura 7: Correntes a serem injetadas no sistema para correção do fator de potência.
Das Figuras 8.a e 8.c pode-se escrever:
sinp�i11q “
�gl11q
�l1
(2.15)
sinp�v12q “
�12g1q
�12
(2.16)
cosp�i11q “
�gl11d
�l1
(2.17)
cosp�v12q “
�12g1d
�12
Capítulo 2. Modelo do Sistema 12
Figura 8: Grandezas nos eixos genéricos.
E para o caso da fase 3, das Figuras 8.b e 8.d :
cosp�v32q “
�32g3d
�32
Capítulo 2. Modelo do Sistema 13
sinp�v32q “
�32g3q
�32
(2.20)
cosp�il3q “
�gl33d
�l3
(2.21)
sinp�il3q “
�gl33q
�l3
(2.22)
Para encontrar a expressao de�Q1 e�Q3 em função das outras grandezas do sistema,
deduz-se a Equação 2.23 e a Equação 2.24 da corrente de linha na carga no eixo da tensão de fase �v1 e �v3 tomando como referência de ângulos o eixo �v1 e �v3 respectivamente
como pode ser observado nas Figuras 9.a e 9.b respectivamente.
Figura 9: Dedução das correntes�Q1 e �Q3
�vl11q “ ´�l1sinpp�v12´�i11´30qq (2.23)
�vl33q “ ´�l3sinpp�v23`30´�i13qq (2.24)
Capítulo 2. Modelo do Sistema 14
que são as correntes de carga �l nos eixos � que estão em sincronismo com as tensões de
fase �1 e�3 respectivamente.
�Q1 “�v 1
l1q “�l1
«
1 2
«
�g121d
�12
�gl11d
�l1 `
�g121q
�12
�gl11q
�l1
ff ` ? 3 2 «
�gl11q
�l1
�12g1d
�12 ´
�g121q
�12
�gl11d
�l1
ffff
(2.25)
�Q3 “�v 3
l3q “�l3
«
´12
«
�g323d
�32
�gl33d
�l3 `
�32g3q
�32
�gl33q
�l3
ff ` ? 3 2 «
�gl33q
�l3
�32g3d
�32 ´
�g323q
�32
�gl33d
�l3
ffff
(2.26)
De posse das Equaçoes 2.25 e 2.26 é preciso decompô-las nos eixos genéricos�1e�3
para termos todas as grandezas nesses eixos e aplicar o controlador. Para isso fazem-se as seguintes decomposições das Equações 2.27, 2.28, 2.29 e 2.30 e chega-se às Equações 2.31, 2.32, 2.33 e 2.34 nos eixos genéricos e deverão ser injetadas no sistema para a correçao da fase 1 e 3 do sistema trifásico.
�gQd1 “ ´�Q1sinp�v12´30q (2.27)
�gQq1 “�Q1cosp30´�v12q (2.28)
�gQd3 “ ´�Q3sinp�v32`30q (2.29)
�gQq3 “�Q3cosp�v32`30q (2.30)
�gQd1 “�Q1
«
1 2
�12g1d
�12 ´
? 3 2
�12g1q
�12
ff
(2.31)
�gQq1 “�Q1
«?
3 2
�g121d
�12 `
1 2
�g121q
�12
ff
(2.32)
�gQd3 “ ´�Q3
«?
3 2
�g323q
�32 `
1 2
�32g3d
�32
ff
(2.33)
�gQq3 “�Q3
«?
3 2
�g323d
�32 ´
1 2
�g323q
�32
ff
Capítulo 2. Modelo do Sistema 15
2.2.2
DeĄnição das correntes de referência para controle do barramento
ca-pacitivo
Apesar do sistema possuir dois Ąltros ativos independentes, do ponto de vista de controle, deverá ser escolhido um dos Ąltros para o controle do barramento, visto que o mesmo é compartilhado. No caso estudado foi escolhido o Ąltro 1 para absorver energia ativa da fonte de forma a manter Ąxa a tensão do barramento do circuito inversor. Para isso, é acrescentado um termo nas correntes de referência de correção do fator de potência das Equações 2.31 e 2.32. Esse termo representa a decomposição de uma corrente �f em
fase com a tensão de linha �12. O valor da corrente �f é obtido através do controle de
tensão do barramento conforme Figura 10.
Figura 10: Diagrama do controlador de tensão do barramento capacitivo.
Portanto, as correntes de referência a serem injetadas na frequência fundamental Ącam:
�˚fg11d1 “�
g1
Qd1`�
g1
f d “
�g121q1
`
�12g1d1
˘2
``
�12g1q1
˘2 `
�12g1d1�
g1
l1q1´�
g1 12q1�
g1
l1d1
˘
`�
g1 12d1
�12
�f (2.35)
�˚fg11q1 “�
g1
Qq1`�
g1
f q “ ´
�12g1d1
`
�g121d1
˘2
``
�g121q1
˘2 `
�g121d1�
g1
l1q1´�
g1 12q1�
g1
l1d1
˘
` �
g1 12q1
�12
�f (2.36)
2.2.3
DeĄnição das correntes de referência para mitigação das harmônicas
O controle seletivo de harmônicas exige a identiĄcação de cada uma delas e a inje-ção das mesmas pelo Ąltro ativo. Assim, a rede apenas fornecerá a energia ativa necessária para alimentar o sistema cabendo ao Ąltro injetar reativos para a correção do fator de potência da fundamental e injetar as correntes harmônicas inerentes à carga.
Para a identiĄcação das harmônicas de forma seletiva, foi utilizada a transformação observada através da Figura 12 em que: �gk e �gk são eixos genéricos em quadratura, na
frequência � ą 1 e gerados através da frequência fundamental (ver Figura 11); �p�q é o sinal de entrada a ser transformado, LPF são Ąltros passa-baixa; e �gkdk e �gkqk são as componentes � e � do sinal nos eixos genéricos de frequência �. Na Figura 11 é possível observar que a frequência da rede �1 detectada através de um PLL com rastreio em
Capítulo 2. Modelo do Sistema 16
ângulos, por sua vez, são utilizados para gerar os eixos �e� genéricos naquela frequência harmônica. De posse destes eixos, são feitas as decomposições do sinal �p�q nestes eixos para obtenção das componentes harmônicas do sinal �p�q através da transformada da Figura 12 Para criar os eixos genéricos foi necessário que um PLL (Phased Locked Loop) com rastreio de frequência fosse utilizado para identiĄcar a frequência exata da rede, pois a frequência da rede varia em décimos de unidade o que causa oscilação nos eixos � e � e, consequentemente, as grandezas que fossem decompostas nesses eixos não seriam contínuas, mas apresentariam oscilações mesmo que de baixa frequência. As deduçoes do PLL digital implementado estão no Apêndice A.
Figura 11: Geração dos eixos genéricos � e � na frequência �.
Figura 12: Transformação para eixos genéricos de frequência �.
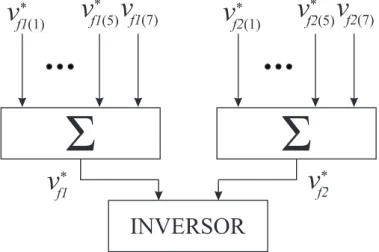
Portanto, para a mitigação das componentes harmônicas, basta fornecer como referência as próprias correntes de linha (encontradas através da transformada da Figura 12) ao sistema de controle. Mais detalhes sobre a transformação no Apêndice B.
2.2.4
Sistema de Controle Geral
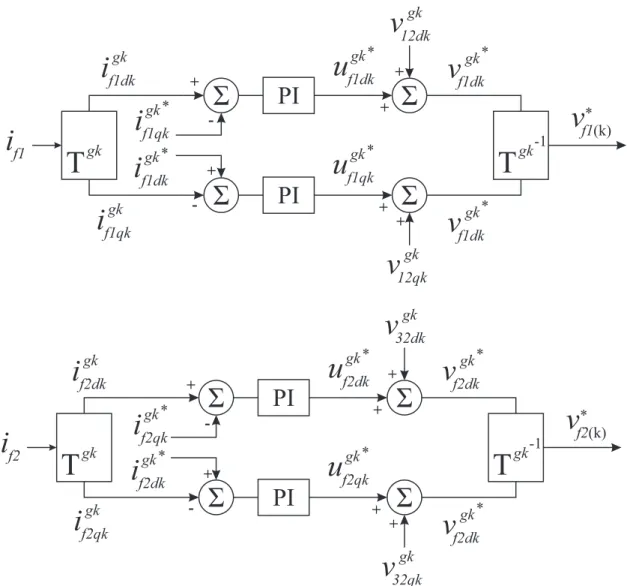
Capítulo 2. Modelo do Sistema 17
submetido acrescida da tensão necessária para gerar a corrente de saída desejada como pode ser observado no esquema genérico da Figura 13.
Figura 13: Diagrama de controle para correção do fator de potência.
Na Figura 13 pode-se observar que o erro da corrente no eixo � gera a tensão de referência para o eixo �, assim como o erro da corrente no eixo � gera a tensão de referência para o eixo �. Isso acontece pois a tensão e a corrente na indutância do Ąltro estão defasadas de 90o, o que torna as tensões do eixo�bem mais sensíveis às variações de
corente do eixo �, da mesma forma para as tensões do eixo�. Além disso, devido à forma pela qual foram gerados os eixos �e �, um erro positivo das correntes do eixo � gera uma tensão negativa no eixo�, sendo assim, foram invertidos os sinais da comparação entre as correntes do eixo � como pode ser observado ainda na Figura 13.
Capítulo 2. Modelo do Sistema 18
Figura 14: Soma das tensões de referência dos controladores.
2.2.5
Análise PWM
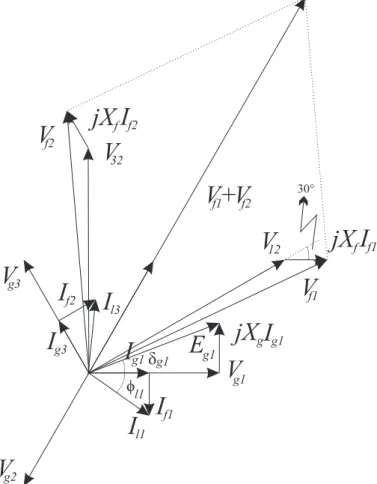
Quando a carga for linear, o FAP estará fornecendo apenas reativos para compen-sar o fator de potência. Desta forma, a corrente �gk deverá possuir a mesma fase da tensão
�gk. Na Figura 15 está representado o sistema em sua forma fasorial no regime permanente
quando o fator de potência é unitário. Neste instante é possível veriĄcar os valores das tensões do Ąltro cujo valor RMS pode ser encontrado pela Equação 2.37. Em que �LL é o
valor RMS da tensão de linha, �f é a reatância do Ąltro na frequência fundamental e�f
é o valor RMS da corrente do Ąltro que pode ser escrito conforme Equação 2.38 onde �l
é o valor RMS da corrente de carga e ãl1 é o ângulo entre a corrente de carga e o ponto
de acoplamento comum (PCC).
�f “�LL`�f�fcosp
Þ
6q (2.37)
�f “�l}sinãl1} (2.38)
Através dessas equações chega-se ao valor da energia reativa que a carga necessita em função do angulo ãl como pode ser veriĄcado na Equação 2.39.
}�l} “
?
3�LL�l}sinãl} (2.39)
Portanto, segue na Equação 2.40 o valor de �f em função da energia reativa que
a carga exige.
�f
�LL “
1`1 2
�f�l
�2
LL
Capítulo 2. Modelo do Sistema 19
Figura 15: Diagrama fasorial do sistema em regime permanente com fator de potência corrigido.
Da Figura 15 tiram se as tensões desejadas no Ąltro�˚f1 e �˚f2 para determinar as
tensões de polo conforme Equações 2.41 e 2.42.
�f˚10´�f˚20“�f˚1 (2.41)
�˚f20´�˚f20“ ´�f˚2 (2.42)
Para que o PWM opere na região linear, as seguintes condições devem ser sa-tisfeitas, em que as tensões de pólo devem ser menores do que metade da tensão � do barrmento do inversor:
› ›�˚f10
›
› ď
�
2 (2.43)
› ›�˚f20
›
› ď
�
2 (2.44)
› ›�g˚20
›
›ď
�
Capítulo 2. Modelo do Sistema 20
›
›�f˚1`�f˚2
›
› ď� (2.46)
Por meio da Figura 15 é possível observar que o ângulo entre �f1 e �f2 é, no
mínimo 120 graus, consequentemente o máximo valor de }�f1`�f2} será }�f} e, por
meio das Equações 2.43, 2.44, 2.45 e 2.46 chega-se à equação da tensão do barramento necessária para que o PWM opere na região linear (ver Equaccão 2.47).
�c
�LL ě
ˆ
1`1 2
�f�l
�2
LL
˙
21
3 Dimensionamento do FAP
3.1 Considerações
Neste trabalho é apresentada uma topologia de FAP com número reduzido de indutores (dois indutores) em comparação à estrutura convencional de Ąltros ativos shunt trĄásicos nos quais um indutor é utilizado na saída de cada um dos três braços do circuito iversor. Neste capítulo será mostrada uma comparação entre os dois modelos de Ąltros ativos tomando como base as seguintes considerações e pontos de análise:
a) Ambos os modelos serão dimensionados para uma mesma carga (potência);
b) Serão analisados os ripples de corrente em ambos os casos;
c) Será analisado o ganho ou perda em volume, quantidade componentes e quan-tidade de cobre utilizada;
d) Serão analisadas as tensões de barramento necessárias para os modelos.
3.2 Análise em regime permanente
Em um sistema trifásico a três Ąos desconsiderando as impedâncias de linha con-forme Figura 16, pode-se escrever a potência ativa e reativa por fase como nas Equações 3.1 e 3.2.
�l “����p�g1�l˚1q (3.1)
�l“��p�g1�l˚1q (3.2)
Em se tendo um Ąltro ativo shunt corrigindo os reativos da fundamental daquele sistema, as correntes da rede Ącam conforme Equações 3.3 a 3.6:
� “����p�g1�g˚1q “ �g1�g˚1 “�l (3.3)
�“��p�g1�g˚1q “0 (3.4)
�g˚1 “
�l
�g1
Capítulo 3. Dimensionamento do FAP 22
Figura 16: Sistema trifásico a três Ąos com inversor shunt.
�g1 “
„
�l
�g1
˚
(3.6)
Da mesma forma:
�g2 “
„
�l
�g2
˚
(3.7)
�g3 “
„
�l
�g3
˚
(3.8)
Sabendo que:
�f1 “�l1´�g1 (3.9)
�f2 “�l2´�g2 (3.10)
Capítulo 3. Dimensionamento do FAP 23
E as equações de malha:
�g1`�f�f1´�inv1 “0 (3.12)
�g2`�f�f2´�inv2 “0 (3.13)
�g3`�f�f3´�inv3 “0 (3.14)
Assim:
�inv1 “�g1`�f�f1 (3.15)
�inv2 “�g2`�f�f2 (3.16)
�inv3 “�g3`�f�f3 (3.17)
Ű
�inv1 “�g1`�fp�l1´�g1q (3.18)
�inv2 “�g2`�fp�l2´�g2q (3.19)
�inv3 “�g3`�fp�l3´�g3q (3.20)
Ű
�inv1 “�g1`�f
„
�l1´
„
�l
�g1
˚
(3.21)
�inv2 “�g2`�f
„
�l2´
„
�l
�g2
˚
(3.22)
�inv3 “�g3`�f
„
�l3´
„
�l
�g3
˚
(3.23)
Em um sistema com um Ąltro ativo com um indutor a menos, as equações Ącam:
�inva “�ga`�f
„
�la´
„
�l
�ga
˚
Capítulo 3. Dimensionamento do FAP 24
�invb “�gb (3.25)
�invc “�ga`�f
„
�lc´
„
�l
�gc
˚
(3.26)
3.3 Análise do ripple de corrente
Pelas Figuras 16 e 17 é possivel determinar a tensão sobre as indutâncias em ambos os modelos de Ąltros aqui tratados. No caso de serem empregados três indutores a maior tensão possível sobre as indutâncias, esta tensão é a tensão � do barramento mais o pico de tensão de linha �l que pode ser�32 ou �12 e esta sobre duas indutâncias de Ąltro. No
caso do circuito com um indutor a menos, a maior tensão possível está sobre apenas uma única indutância como pode ser observado na malha em destaque da Figura 17
Figura 17: Sistema trifásico a três Ąos com inversor shunt com um indutor a menos.
O maior ripple ocorre quando essa tensão máxima é aplicada durante um ciclo completo de chaveamento. Assim:
�ind“�
��
�� (3.27)
Δ�tresˆ “
1 2�trˆes
ż
T cp
Capítulo 3. Dimensionamento do FAP 25
Δ�tresˆ “ p
�` |�L|q
2�tresˆ
�c (3.29)
E,
Δ�dois“ p
�` |�L|q
�dois
�c (3.30)
Como pode-se observar, no caso de um indutor a menos (Eq. 3.30) o ripple de corrente é duas vezes maior do que no caso do circuito com três indutores (Eq. 3.29). Com isso, medidas devem ser tomadas para que o ripple seja o mesmo do caso convencional. Para isso, a medida mais simples é duplicar a indutância. Pode-se também dobrar a frequência de chavemento. Na Figura 18 é mostrada a forma de onda de corrente do braço central de um FAP com três indutores e a forma de onda da corrente do braço central do FAP com dois indutores sem duplicar a indutância. Neste caso, o valor médio dos ripples do circuito com três indutores é de 0.93 e o com dois indutores é de 2.82. Na Figura 19 é plotada a forma de onda da corrente do braço central do FAP com dois indutores de indutância duplicada, assim, o valor médio dos ripples foi de 1.41. Portanto, a duplicação do valor da indutância é satisfatória e torna o ripple duas vezes menor. As diferenças entre os valores ainda persiste devido à diferença entre as tensões de referência e o valor do barramento necessário como será visto nos tópicos seguintes.
Figura 18: Ripples de corrente do braço central dos FAP com três e dois indutores com mesmo valor de indutância.
Assim, faz-se:
�dois“2�tresˆ (3.31)
Δ�tresˆ “ p
�` |�L|q
2�trˆes
�c “Δ�dois“ p
� ` |�L|q
�dois
�c (3.32)
Capítulo 3. Dimensionamento do FAP 26
Figura 19: Ripples de corrente do braço central do FAP com três indutores e do FAP com dois indutores duas vezes maiores.
o volume. Este artifício é a utilização de entreferros de ar ou outro material com baixa permeabilidade magnética. Com isso, pode-se aumentar o valor da indutância � sem aumentar a área � e o comprimento � de forma signiĄcante.
ℜT “ �nucleo´
Ûnucleo´ �nucleo´ `
�entref erro
Ûentref erro�entref erro
(3.33)
Com o aumento da relutância ℜ é possível diĄcultar a passagem de Ćuxo
mag-nético conforme Equação 3.34, consequentemente diminuindo o campo induzido. Assim, o indutor poderá operar com correntes maiores em seus enrolamentos sem que ocorra a saturação do núcleo como pode ser observado no gráĄco da na Figura 20.
Φ“ � �
ℜ (3.34)
Para alterar o valor da indutância L, basta aumentar ou diminuir seu entreferro. Para isso, a relutância do núcleo é desprezada e considera-se apenas a relutância do entreferro que é, geralmente, muito maior.
�“ �
2
ℜ (3.35)
Ao aumentar a relutância ℜ do circuito magnético, o valor da indutância irá
di-minuir como pode ser observador na Equação 3.35, para compensar essa diminuição é preciso aumentar o número de espiras do indutor. O aumento do número de espiras irá inĆuenciar de forma quadrática do valor da indutância �.
Capítulo 3. Dimensionamento do FAP 27
Figura 20: Efeito do entreferro na saturação do núcleo.
conforme observado através da Equação 3.36. Entretanto, de acordo com a Equação 3.35, a diminuição quadrática do número de espiras não permite que se obtenha valores maiores de indutância.
Portanto, o aumento da quantidade de cobre inĆuencia de forma quadrática o valor da indutância, sendo assim, ao aumentar em duas vezes o número de espiras, pode-se duplicar o valor da relutância ℜ e será obtido um indutor com o dobro do valor de
indutância e ainda assim o núcleo não irá saturar conforme Equação 3.36.
� “ � �
ℜ� (3.36)
Apesar do aumento da quantidade de cobre utilizada, é possível reduzir um in-dutor conforme proposto e ainda assim manter o mesmo ripple de corrente que o caso convencional. Portanto, tem-se um Ąltro ativo com um componente a menos e volume a ser reduzido.
3.4 Análise do barramento do inversor
Ao aumentar o valor das indutâncias, será necessário aumentar o valor da tensão do barramento �� que compõe o circuito inversor. Das equações de malha:
�inv1 “�g1`�f
„
�l1´
„
�l
�g1
˚
(3.37)
�inva “�ga`2�f
„
�la´
„
�l
�ga
˚
Capítulo 3. Dimensionamento do FAP 28
Sabe-se que as tensões máximas por fase do inversor trifásico são ˘?� 3.
�tresˆ
?
3 “�g1`�f
„
�l1 ´
„
�l
�g1
˚
(3.39)
�dois
?
3 “�ga`2�f
„
�la´
„
�l
�ga
˚
(3.40)
Para o mesmo sistema,�ga “�g1 “�g e�la “�l1 “�l
�g “
�tresˆ
?
3 ´�f
„
�l´
„
�l
�g
˚
(3.41)
�g “
�dois
?
3 ´2�f
„
�l´
„
�l
�g
˚
(3.42)
Igualando as Equações, obtém-se:
�dois “�trˆes`
? 3�f
„
�l´
„
�l
�g
˚
(3.43)
Para o caso das componentes hamônicas, faz-se a mesma análise. Para a eliminação das componentes harmônicas, a rede não fornecerá nenhuma corrente, ou seja, no circuito em regime permanente, a fonte da rede é um aberto pois toda a corrente harmônica, tanto sua compoente �, quanto sua componente �, será fornecida pelo Ąltro, portanto:
�gk “����p�gk1�
k˚
g1q “ 0 (3.44)
�kg “��p�gk1�gk1˚q “0 (3.45)
E,
�gk1 “0 (3.46)
�gk2 “0 (3.47)
�gk3 “0 (3.48)
Sabendo que:
Capítulo 3. Dimensionamento do FAP 29
�fk2 “�
k l2´�
k
g2 (3.50)
�fk3 “�
k l3´�
k
g3 (3.51)
Tem-se que:
�fk1 “�
k
l1 (3.52)
�fk2 “�
k
l2 (3.53)
�fk3 “�
k
l3 (3.54)
E as equações de malha:
�gk1`�
k f�
k f1´�
k
inv1 “0 (3.55)
�gk2`�
k f�
k f2´�
k
inv2 “0 (3.56)
�gk3`�
k f�
k f3´�
k
inv3 “0 (3.57)
Ű
�fk�fk1´�
k
inv1 “0 (3.58)
�fk�fk2´�invk 2 “0 (3.59)
�fk�fk3´�
k
inv3 “0 (3.60)
Ű
�invk 1 “�
k f�
k
f1 (3.61)
�invk 2 “�
k f�
k
f2 (3.62)
�invk 3 “�
k f�
k
Capítulo 3. Dimensionamento do FAP 30
Como�f xk “�lxk
�invk 1 “�
k f�
k
l1 (3.64)
�invk 2 “�
k f�
k
l2 (3.65)
�invk 3 “�
k f�
k
l3 (3.66)
Em um sistema com 1 indutor a menos, as equações seguem:
�invak “�fk�lak (3.67)
�invbk “0 (3.68)
�invck “�fk�lck (3.69)
A análise do ripple já foi realizada e foi encontrada a relação do ripple e sabe-se que ela depende apenas da tensão do barramento e da tensão da rede. O valor � da indutância não varia com a frequência.
Façamos agora a análise da necessidade de aumento da tensão do barramento�.
�invak “�fk�lak (3.70)
�invk 1 “�
k f�
k
l1 (3.71)
Sabe-se que as tensões máximas por fase do inversor trifásico são ˘?� 3.
�dois
?
3 “�
k f�
k
la (3.72)
�tresˆ
?
3 “�
k f�
k
l1 (3.73)
Ű
�dois “
?
3�fk�lak (3.74)
�trˆes“
?
Capítulo 3. Dimensionamento do FAP 31
Assim, a tensão do barramento total necessária para que o PWM opere em região linear é:
�dois“
? 3
«
�g`2�f
«
´
„
�l
�g
˚
`
H
ÿ
k“1
��lk
ffff
(3.76)
�tresˆ “
? 3
«
�g`�f
«
´
„
�l
�g
˚
`
H
ÿ
k“1
��lk
ffff
32
4 Resultados
4.1 Simulação do Ąltro ativo
O modelo apresentado em 2.9 foi discretizado e simulado juntamente com o sis-tema de controle apresentado. Foram utilizadas diversas cargas com diferentes valores de reativos. Além disso, foram introduzidas a quinta e sétima harmônicas para eliminação seletiva. Foi utilizado o software Matlab e, no programa, os seguintes parâmetros:
- Passo de simulação = 10´6
- Passo de cálculo = 10´4
- Tensão da rede = 110�p���q
- Indutância da rede = 50010´6
- Indutância di Ąltro = 7.27510´3
- Resistência da rede = 0.1�ℎ�
- Resistência do Ąltro = 0.47�ℎ�
- FP = 0.86
4.1.1
Simulação do Ąltro ativo corrigindo apenas reativos da fundamental
Utilizando uma carga balanceada linear (sem a presença de harmônicos), foi si-mulado o funcionamento do FAP para diversos valores de defasagem. Na Figura 21 é ilustrado o funcionamento do sistema com 0,87 de fator de potência. E, em seguida, na Figura 22 é ilustrado o sistema corrigido com fator de potência próximo da unidade.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
−200 −150 −100 −50 0 50 100 150 200
t(s)
V(V)
Tensões e Correntes defasadas
Capítulo 4. Resultados 33
0.95 0.955 0.96 0.965 0.97 0.975 0.98 0.985 0.99 0.995 1
−200 −150 −100 −50 0 50 100 150 200
t(s)
V(V)
Tensões e Correntes defasadas
Figura 22: Tensões e correntes de fase com fator de potência próximo da unidade.
Pela Figura 22 pode-se perceber que as correntes de fase/linha entram em fase com as tensões após a intervenção dos controladores.
4.1.2
Simulação do Ąltro ativo corrigindo reativos da fundamental e
harmô-nicos
Neste trabalho foram simuladas a quinta e a sétima harmônicas e corrigidas ambas seletivamente. Na Figura 23 é ilustrado o circuito com fator de potência de 0,87, quinta e sétima harmônicas sem nenhuma intervenção do FAP. Já na Figura 24 é ilustrado espectro em frequências de uma das correntes de rede do circuito contendo as harmônicas de carga.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
−200 −150 −100 −50 0 50 100 150 200
t(s)
V(V)
Capítulo 4. Resultados 34
0 50 100 150 200 250 300 350 400 450 500
0 1 2 3 4 5 6 7 8 9 10
Frequency (Hz)
|Y(f)|
Figura 24: Corrente no espectro de frequências.
Na Figura 25 são ilustradas as formas de onda do circuito com a correção do fator de potência da fundamental e a mitigação da quinta harmônica. Pode-se observar uma melhora na forma de onda quase senoidal da corrente e a redução da componente de quinta harmônica (300Hz) no gráĄco do espectro em frequências da Figura 26.
0.95 0.955 0.96 0.965 0.97 0.975 0.98 0.985 0.99 0.995 1
−200 −150 −100 −50 0 50 100 150 200
t(s)
V(V)
Figura 25: Circuito com correção da quinta harmônica e fator de potência.
Capítulo 4. Resultados 35
0 50 100 150 200 250 300 350 400 450 500
0 2 4 6 8 10
Frequency (Hz)
|Y(f)|
Figura 26: Corrente do espectro de frequências.
0.9 0.905 0.91 0.915 0.92 0.925 0.93 0.935 0.94 0.945 0.95
−200 −150 −100 −50 0 50 100 150 200
t(s)
V(V)
Figura 27: (Circuito com correção da quinta e sétima harmônicas e fator de potência.
4.2 Resultados experimentais.
Para validar o desenvolvimento do circuito, foi testado o sistema discretizado na bancada de experimentos da Figura 29. Ela possui dois módulos da Semikron SKS 25F B6U + B6CI 09 V12, drivers para acionamento das chaves, um DSP da Texas Instruments TMS320F28335 e sensores LEM de tensão e corrente (LV20 e LA25).
A esta bancada foi conectado um retiĄcador trifásico para servir de carga. Devido a limitações da bancada, foi testado apenas um Ąltro ativo dos dois que foram modelados conforme em destaque na Figura 30.
Capítulo 4. Resultados 36
0 50 100 150 200 250 300 350 400 450 500
0 1 2 3 4 5 6 7 8 9 10
Frequency (Hz)
|Y(f)|
Figura 28: Corrente no espectro de frequências.
Figura 29: Bancada de experimental.
Capítulo 4. Resultados 37
Figura 30: Sistema montado em bancada experimental - apenas um dos Ąltros em funci-onamento.
Figura 31: Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando apenas os reativos da fundamental.
Capítulo 4. Resultados 38
Figura 32: Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental e a quinta harmônica.
Figura 33: Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental, a quinta e a sétima harmônicas.
Na Figura 33 são mostradas a tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental, a quinta, sétima harmônicas da corrente da rede.
Na Figura 34 são mostradas a tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental, a quinta, sétima e décima primeira harmônicas da corrente da rede.
Capítulo 4. Resultados 39
Figura 34: Tensão da rede, corrente da rede, corrente da carga e corrente do Ąltro ativo eliminando os reativos da fundamental, a quinta, a sétima e a décima primeira harmônicas.
40
5 Conclusões
Neste trabalho foi apresentado um Filtro Ativo Shunt para sistemas trifásicos a três Ąos para correção do fator de potência e eliminação seletiva de harmônicas com um indutor a menos em comparação à estrutura convencional de Ąltros ativos trifasicos shunt. O sistema com uma impedância a menos foi modelado e foi elaborada uma estratégia de controle baseada em eixos síncronos. Ambos os modelos foram validados via simulação. Com a análise em regime permanente foram comparados os circuitos com dois e três indu-tores. Desta comparação conclui-se que o ripple de corrente no caso do circuito com dois indutores é maior e, portanto, necessita que seus indutores possuam valor de indutância duas vezes maior para que haja uma equivalência entre os modelos. Além da diferença nos ripples de corrente, faz-se necessário que o barramento dc do circuito inversor possua va-lor maior de tensão em comparação ao circuito com três indutores. Com essa modiĄcação pode-se chegar a conĄgurações com um componente a menos e menor volume muito em-bora ainda se faz necessário que uma análise de perdas seja realizada. Finalmente, foram realizados experimentos para validação dos estudos que mostraram a eĄcácia da técnica aplicada. Na tentativa de superar as limitações instrumentais foi projetada e, em parte, realizada uma bancada experimental de menor porte e fácil replicação para implementar este sistema e quaisquer outros que utilizem os mesmos blocos funcionais.
5.1 Sugestões para trabalhos futuros
Estudo de perdas;
Utilização conjunta de Ąltros passivos;
41
Referências
1 SASAKI, H.; MACHIDA, T. A new method to eliminate ac harmonic currents by magnetic Ćux compensation-considerations on basic design. Power Apparatus and Systems, IEEE Transactions on, PAS-90, n. 5, p. 2009Ű2019, Sept 1971. ISSN 0018-9510. Citado na página 1.
2 GYUGYI, L.; STRYCULA, E. Active ac power Ąlters. IEEE Ind. Appll. Soc. Ann, p. 529Ű535, 1976. Citado na página 1.
3 JEONG, G.; PARK, T.; KWON, B. Line-voltage-sensorless active power Ąlter for reactive power compensation. Electric Power Applications, IEE Proceedings -, v. 147, n. 5, p. 385Ű390, Sep 2000. ISSN 1350-2352. Citado 4 vezes nas páginas 1, 2, 5 e 6.
4 DUKE, R. M.; ROUND, S. The steady-state performance of a controlled current active Ąlter. Power Electronics, IEEE Transactions on, v. 8, n. 2, p. 140Ű146, Apr 1993. ISSN 0885-8993. Citado na página 1.
5 RUTH, L. a.; RAUMUNDO, S.; ANTUNES, F. Harmônicos em Sistemas Elétricos. São Paulo-SP, Brasil: Elsevier Editora Ltda., 2014. ISBN 9788535274394. Citado na página 1.
6 KABIR, M.; MAHBUB, U. Synchronous detection and digital control of shunt active power Ąlter in power quality improvement. In: Power and Energy Conference at Illinois (PECI), 2011 IEEE. [S.l.: s.n.], 2011. p. 1Ű5. Citado 2 vezes nas páginas 1 e 5.
7 JOU, H.-L. et al. A novel active power Ąlter for harmonic suppression. Power Delivery, IEEE Transactions on, v. 20, n. 2, p. 1507Ű1513, April 2005. ISSN 0885-8977. Citado na página 1.
8 VAZ, A. Filtro Ativo de Potência Trifásico Paralelo Comandado para Várias Funções - Aspectos teóricos e práticos e reator eletrônico alto FP: Contribuições a otimização da qualidade de energia. Tese (Doutorado) Ů Universidade Federal de Uberlândia, April 2006. Citado na página 1.
9 JAIN, T.; JAIN, S.; AGNIHOTRI, G. Comparison of topologies of hybrid active power Ąlter. In: Information and Communication Technology in Electrical Sciences (ICTES 2007), 2007. ICTES. IET-UK International Conference on. [S.l.: s.n.], 2007. p. 503Ű509. ISSN 0537-9989. Citado na página 2.
10 DEMIRDELEN, T. et al. Review of hybrid active power Ąlter topologies and controllers. In: Power Engineering, Energy and Electrical Drives (POWERENG), 2013 Fourth International Conference on. [S.l.: s.n.], 2013. p. 587Ű592. ISSN 2155-5516. Citado 3 vezes nas páginas 3, 4 e 5.