Localiza¸c˜
ao Indoor
Por
Jo˜ao Tiago Pinheiro Cordeiro
Orientador: Doutor Carlos Manuel Jos´e Alves Serˆodio
Co-orientador: Doutor Pedro Miguel Mestre Alves da Silva
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie–A, Decreto-Lei n.o
74/2006 de 24 de Mar¸co e no Regulamento de Estudos P´os-Graduados da UTAD
DR, 2.a
s´erie – Delibera¸c˜ao n.o
Doutor Carlos Manuel Jos´e Alves Serˆodio
Professor Associado com Agrega¸c˜ao do
Departamento de Engenharias da Escola de Ciˆencias e Tecnologia Universidade de Tr´as-os-Montes e Alto Douro
Doutor Pedro Miguel Mestre Alves da Silva
Professor Auxiliar do
Departamento de Engenharias da Escola de Ciˆencias e Tecnologia Universidade de Tr´as-os-Montes e Alto Douro
”Most good programmers do programming not because they expect to get paid or get adulation by the public, but because it is fun to program.”
Linus Torvalds(1969 – Present)
A quem dedico, Pais, irm˜ao, av´o e L´ıgia.
Os membros do J´uri recomendam `a Universidade de Tr´as-os-Montes e Alto Douro a aceita¸c˜ao da disserta¸c˜ao intitulada “ T´ecnicas de Localiza¸c˜ao Indoor ” realizada por Jo˜ao Tiago Pinheiro Cordeiro para satisfa¸c˜ao parcial dos requisitos do grau de Mestre.
Mar¸co 2015
Presidente: Doutor Jo˜ao Agostinho Batista de Lacerda Pav˜ao,
Direc¸c˜ao do Mestrado em Engenharia Electrot´ecnica e de
Computadores da Escola de Ciˆencias e Tecnologia da Universidade de Tr´as-os-Montes e Alto Douro
Vogais do J´uri: Doutor Jos´e Carlos Meireles Monteiro Metrˆolho,
Professor Adjunto do Instituto Polit´ecnico de Castelo Branco
Doutor Carlos Manuel Jos´e Alves Serˆodio,
Professor Associado com Agrega¸c˜ao do Departamento de
Engenharias da Escola de Ciˆencias e Tecnologia da Universidade de Tr´as-os-Montes e Alto Douro
Doutor Pedro Miguel Mestre Alves da Silva,
Professor Auxiliar do Departamento de Engenharias da Escola de Ciˆencias e Tecnologia da Universidade de Tr´as-os-Montes e Alto Douro
Localiza¸c˜ao Indoor
Jo˜ao Tiago Pinheiro Cordeiro
Submetido na Universidade de Tr´as-os-Montes e Alto Douro para o preenchimento dos requisitos parciais para obten¸c˜ao do grau de
Mestre em Engenharia Electrot´ecnica e de Computadores
Resumo — Os Servi¸cos Baseados em Localiza¸c˜ao (SBL) s˜ao definidos como sendo servi¸cos que utilizam a localiza¸c˜ao do dispositivo m´ovel do utilizador para fornecer informa¸c˜oes personalizadas, e servi¸cos espec´ıficos, dependendo dessa mesma localiza¸c˜ao. Para a utiliza¸c˜ao destes servi¸cos ´e imperativa a localiza¸c˜ao do terminal m´ovel. Apesar do GPS ser uma tecnologia bem afirmada e precisa, n˜ao tem um funcionamento universal. Em ambientes fechados, diga-se indoor, esta tecnologia pode mesmo n˜ao funcionar. Para a obten¸c˜ao de um sistema de localiza¸c˜ao indoor fi´avel, deve ser considerado o uso de outras t´ecnicas para a aquisi¸c˜ao de informa¸c˜ao de posicionamento. Uma das t´ecnicas que ´e utilizada nos sistemas de localiza¸c˜ao tem a designa¸c˜ao de an´alise de cena por fingerprinting, e tem por base a medi¸c˜ao e an´alise de parˆametros dos sinais electromagn´eticos, tipicamente a grandeza de RSSI, Received Signal Strenght Indicator. A t´ecnica de fingerprinting ´e composta por duas fases distintas: a primeira fase, offline, onde s˜ao adquiridos dados a partir do cen´ario a considerar e armazenadas numa base de dados chamada Fingerprint Map e uma segunda fase, online, que consiste na determina¸c˜ao da localiza¸c˜ao do terminal m´ovel comparando os dados recebidos a partir das referˆencias com os dados guardados no mapa com a utiliza¸c˜ao de um Location Estimation Algorithm (LEA), um algoritmo de estima¸c˜ao de localiza¸c˜ao. Existem v´arios fatores que alteram o comportamento dos sinais electromagn´eticos sendo que um dos quais ´e a presen¸ca de obst´aculos. Sabe-se que o pr´oprio corpo humano absorve ondas electromagn´eticas e que este facto interfere com os dados de RSSI que s˜ao obtidos, trazendo como consequˆencia uma diminui¸c˜ao do rendimento da t´ecnica. Neste trabalho para mitigar os efeitos causados pelo corpo
humano, pretende utilizar-se a informa¸c˜ao da orienta¸c˜ao do utilizador. ´E tamb´em apresentado um LEA probabil´ıstico sendo comparado com diferentes algoritmos de estima¸c˜ao de localiza¸c˜ao para medir a sua performance. Um problema intr´ınseco `a utiliza¸c˜ao de Fingerprint Maps(FM) ´e o custo temporal existente durante a fase de obten¸c˜ao dos dados para a cria¸c˜ao dos mesmos. Como solu¸c˜ao, podem utilizar-se ferramentas de simula¸c˜ao dos FM. Na realiza¸c˜ao deste trabalho, e utilizando uma destas ferramentas, foi adicionada a informa¸c˜ao da orienta¸c˜ao do utilizador para tentar diminuir o erro de localiza¸c˜ao. Para al´em de uma obten¸c˜ao pontual e ´unica da posi¸c˜ao de um terminal m´ovel existe tamb´em a possibilidade de realizar uma procura cont´ınua do mesmo. Chama-se tracking `a procura cont´ınua de um terminal m´ovel enquanto este se move dentro de um determinado cen´ario. Com este trabalho pretende-se tamb´em melhorar a performance dos sistemas de tracking t´ıpicos com a adi¸c˜ao e teste de uma t´ecnica que obt´em a designa¸c˜ao de Dead Reckoning.
Palavras Chave: Localiza¸c˜ao, Android, Fingerprinting, Orienta¸c˜ao, Algoritmo de Estima¸c˜ao de Localiza¸c˜ao , Tracking, Dead Reckoning
Jo˜ao Tiago Pinheiro Cordeiro
Submitted to the University of Tr´as-os-Montes and Alto Douro in partial fulfilment of the requirements for the degree of Master of Science in Electrical Engineering and Computers
Abstract — Location Based Services (LBS) are defined as services that use the location of a user’s mobile device to provide custom information and services regarding that same localization. To use those services it is imperative to know the localization of the roaming terminal. Despite GPS being a well established and precise technology it does not have a universal operation. In closed indoor environments, it might not work at all. To obtain a reliable indoor localization system, one must consider the use of other techniques with the purpose of acquisition of positioning information. One of such techniques, widely used on localization systems goes by the name of scene analysis by fingerprinting, and it is based on measuring and analyzing parameters from electromagnetic signals, typically RSSI values. Fingerprinting technique is comprised of two distinct phases: the first one, offline, where data is collected from the scenario to consider and stored in a database called Fingerprint Map and a second phase, online, that consists in determining the localization of the roaming terminal by comparing the data received from the references with the data stored in the map using a Location Estimation Algorithm (LEA). There are a number of factors that change the behavior of electromagnetic signals one of those being the presence of obstacles. It is known that the human body can absorb electromagnetic waves and that it interferes with the RSSI data obtained thus reducing the technique’s performance. This work, so that the human body effects can be mitigated, it is intended to use orientation information. It is also presented a probabilistic LEA being compared with other different algorithms of location estimation to measure its performance. One of the intrinsic problems of using Fingerprint Maps as a localization technique is the existing temporal cost
during the data gathering phase. As a solution, one might use FM simulation tools. During this work, and using one of these tools, it was added the orientation information of the user to try lowering the localization error. Apart from punctual and unique position of the mobile terminal there is also the possibility of doing a continuous search of it. Tracking is defined as the continuous search for the roaming node while it is moving inside a given scenario. This work it is also aimed to improve the typical tracking systems performance with the addiction and test of a technique which as the designation of Dead Reckoning.
Key Words: Localization, Android, Fingerprinting, Orientation-Aware, Location Estimation Algorithm , Tracking, Dead Reckoning
Aos meus orientadores, Professores Doutores Carlos Manuel Jos´e Alves Serˆodio e Pedro Miguel Mestre Alves da Silva, por toda a ajuda, paciˆencia, disponibilidade, incentivo e ensinamentos, n˜ao s´o na execu¸c˜ao deste trabalho mas em todo o meu percurso acad´emico um sincero e sentido agradecimento.
Aos meus pais, av´os e irm˜ao, por todo o apoio moral e financeiro e tamb´em por todo o amor incondicional que me deram ao longo destes anos. Sem vocˆes nunca teria chegado onde estou. Muito obrigado.
`
A minha namorada L´ıgia, por todo o apoio, paciˆencia, ajuda e companhia nos bons e maus momentos da finaliza¸c˜ao desta etapa.
`
A Da Elisabete Felizardo, a minha m˜ae adotiva durante o meu percurso acad´emico por ter sido realmente como uma m˜ae para mim, sempre disposta a ajudar e presente nos bons e maus momentos. Muito obrigado.
A todos os meus colegas do curso de Engenharia Electrot´ecnica e de Computadores da Universidade de Tr´as-os-Montes e Alto Douro, curso pelo qual sinto um profundo amor, em especial ao Pedro Sousa, M´ario Fonseca, Jo˜ao Rodrigues e a S´ergio Patinha de Medicina Veterin´aria pela sua amizade, companheirismo e momentos que nunca vou esquecer.
A todos, um sincero e sentido obrigado! xiii
UTAD, Jo˜ao Tiago Pinheiro Cordeiro Vila Real, 2015
Resumo ix
Abstract xi
Agradecimentos xiii
´Indice de tabelas xix
´Indice de figuras xxi
Gloss´ario, acr´onimos e abreviaturas xxiii
1 Introdu¸c˜ao 1 1.1 Hist´oria da Localiza¸c˜ao . . . 1 1.2 Motiva¸c˜ao . . . 4 1.3 Contribui¸c˜ao. . . 6 1.4 Organiza¸c˜ao da disserta¸c˜ao. . . 8 2 Sistemas de Localiza¸c˜ao 9 2.1 Caracter´ısticas de um Sistema de Localiza¸c˜ao . . . 9
2.2 Metodologias de Localiza¸c˜ao . . . 13
2.2.1 Triangula¸c˜ao . . . 13
2.2.2 Proximidade . . . 22
2.2.3 An´alise de Cena . . . 24
2.3 Medidas de Performance das T´ecnicas de Localiza¸c˜ao . . . 28 xv
2.3.1 Accuracy (Precis˜ao). . . 28 2.3.2 Reliability (Fiabilidade) . . . 29 2.3.3 Latency (Latˆencia) . . . 29 2.3.4 Availability (Disponibilidade) . . . 29 2.3.5 Applicability (Aplicabilidade) . . . 30 2.4 Trabalhos Relacionados . . . 30
2.4.1 Global Position System - GPS . . . 31
2.4.2 RADAR . . . 32 2.4.3 SmartFloor . . . 33 2.4.4 Cricket . . . 34 2.4.5 Active Badge . . . 35 2.4.6 Active Bat . . . 36 2.4.7 PinPoint . . . 37 2.4.8 Motetrack . . . 39 2.4.9 Indoor Atlas . . . 40 2.4.10 Outros Trabalhos . . . 41 3 Fingerprinting 43 3.1 Metodologia de Localiza¸c˜ao por Fingerprinting . . . 44
3.1.1 Dom´ınios . . . 45
3.1.2 Fases . . . 47
3.2 Estado da Arte . . . 48
3.3 Location Estimation Algorithms (LEA) . . . 50
3.3.1 Nearest Neighbour . . . 51
3.3.2 Neural Networks . . . 53
3.3.3 Bayesian Method . . . 56
3.4 Problemas dos M´etodos por Fingerprinting . . . 59
3.5 An´alise de Melhor Desempenho . . . 63
4 Concep¸c˜ao e Implementa¸c˜ao 67 4.1 Porting de Bibliotecas para Android . . . 68
4.1.1 Novas Funcionalidades . . . 70
4.2 M´ultiplos Fingerprint Maps . . . 77
4.2.1 Conceito . . . 78
4.2.2 Aplica¸c˜ao LEAPin . . . 83
4.2.3 Utiliza¸c˜ao com V´arios LEA . . . 87
4.2.4 Algoritmo Direto e Ponderado . . . 89
4.3 M´etodo Probabil´ıstico . . . 94
4.3.1 Variantes do M´etodo . . . 96
4.4 Tracking . . . 97 xvi
5 Ensaios e Resultados 103
5.1 Primeiro ensaio de Figerprint Maps orientados . . . 105
5.1.1 Resultados e Problemas . . . 108
5.2 Segundo ensaio de Figerprint Maps orientados . . . 111
5.2.1 Resultados e Problemas . . . 111
5.3 Ensaios `a b´ussola com Intensidade de Campo Magn´etico Total . . . . 114
5.3.1 Resultados Observados . . . 116
5.4 Ensaio com FM H´ıbridos . . . 118
5.4.1 Resultados Obtidos . . . 119
5.5 Escolha Dinˆamica dos Mapas . . . 122
5.5.1 Motiva¸c˜ao . . . 122
5.5.2 Resultados . . . 123
5.6 Simula¸c˜ao . . . 128
5.6.1 Resultados . . . 134
5.7 Tracking . . . 142
5.7.1 Tracking com Dead Reckoning . . . 142
5.7.2 Resultados . . . 144
6 Conclus˜ao e Trabalho Futuro 151 6.1 Trabalho Futuro. . . 154
6.2 Mapas/Triangula¸c˜ao . . . 155
Referˆencias Bibliogr´aficas 159
2.1 Disponibilidade dos M´etodos de Localiza¸c˜ao. . . 30
3.1 Parˆametros dos Diferentes Tipos de Localiza¸c˜ao. . . 63
3.2 Desempenho dos Sistemas de Localiza¸c˜ao. . . 64
5.1 Primeiro Ensaio Realizado . . . 109
5.2 Primeiro Ensaio Realizado - LEA com m´edia de k pontos . . . 109
5.3 Primeiro Ensaio Realizado - LEA com pondera¸c˜ao de k pontos . . . . 109
5.4 Segundo Ensaio Realizado . . . 112
5.5 Segundo Ensaio Realizado - LEA com m´edia de k pontos . . . 112
5.6 Segundo Ensaio Realizado - LEA com pondera¸c˜ao de k pontos . . . . 112
5.7 Quarto Ensaio Realizado . . . 120
5.8 Quarto Ensaio Realizado - LEA com m´edia de k pontos . . . 120
5.9 Quarto Ensaio Realizado - LEA com pondera¸c˜ao de k pontos . . . 120
5.10 Resultados Sistema H´ıbrido . . . 121
5.11 Resultados Sistema H´ıbrido - LEA com m´edia de k pontos . . . 121
5.12 Resultados Sistema H´ıbrido - LEA com pondera¸c˜ao de k pontos . . . 121
5.13 Algoritmo Ponderado Simples . . . 123
5.14 Algoritmo Ponderado Simples - LEA com m´edia de k pontos . . . 124 xix
5.15 Algoritmo Ponderado Simples - LEA com pondera¸c˜ao de k pontos . . 124
5.16 Algoritmo Ponderado com Lei Quadr´atica . . . 124
5.17 Algoritmo Ponderado com Lei Quadr´atica - LEA com m´edia de k pontos . . . 125
5.18 Algoritmo Ponderado com Lei Quadr´atica - LEA com pondera¸c˜ao de k pontos . . . 125
5.19 Algoritmo Ponderado . . . 126
5.20 Algoritmo Ponderado - LEA com m´edia de k pontos . . . 126
5.21 Algoritmo Ponderado - LEA com pondera¸c˜ao de k pontos . . . 127
5.22 Algoritmo Ponderado com Lei Quadr´atica . . . 127
5.23 Algoritmo Ponderado com Lei Quadr´atica - LEA com m´edia de k pontos . . . 127
5.24 Algoritmo Ponderado com Lei Quadr´atica - LEA com pondera¸c˜ao de k pontos . . . 128
5.25 Tabela Resultados com FM -3.5 e Medidas Simuladas . . . 136
5.26 Tabela Resultados com FM -5 e Medidas Simuladas . . . 137
5.27 Resultados com Amostras Reais - Aproxima¸c˜ao de Desvio Padr˜ao . . 140
5.28 Resultados com Amostras Reais . . . 140
5.29 Tracking Ponto-a-Ponto . . . 145
5.30 Tracking Ponto-a-Ponto - LEA com m´edia de k pontos . . . 145
5.31 Tracking Ponto-a-Ponto - LEA com pondera¸c˜ao de k pontos . . . 146
5.32 Tracking Dead Reckoning - Percurso Pequeno . . . 146
5.33 Tracking Dead Reckoning - Percurso Grande . . . 147
2.1 Latera¸c˜ao Circular . . . 14
2.2 Latera¸c˜ao Hiperb´olica . . . 15
2.3 Exemplo de Angula¸c˜ao . . . 21
2.4 QTCTMPressure Mat . . . 23
2.5 Sistema de Localiza¸c˜ao por C´elula de Origem . . . 23
2.6 Sistema RFID . . . 25
2.7 Algoritmo Markless para Localiza¸c˜ao de Pessoas . . . 26
2.8 Fingerprint Map . . . 28
2.9 Constela¸c˜ao GPS . . . 31
2.10 C´elula SmartFloor (Esquerda) - Sensor de Press˜ao (Direita) . . . 34
2.11 Beacons do Sistema Cricket . . . 35
2.12 Sistema Active Badge . . . 36
2.13 Exemplo de um N´o do Sistema PinPoint . . . 38
2.14 Motetrack - Mica2 Mote . . . 39
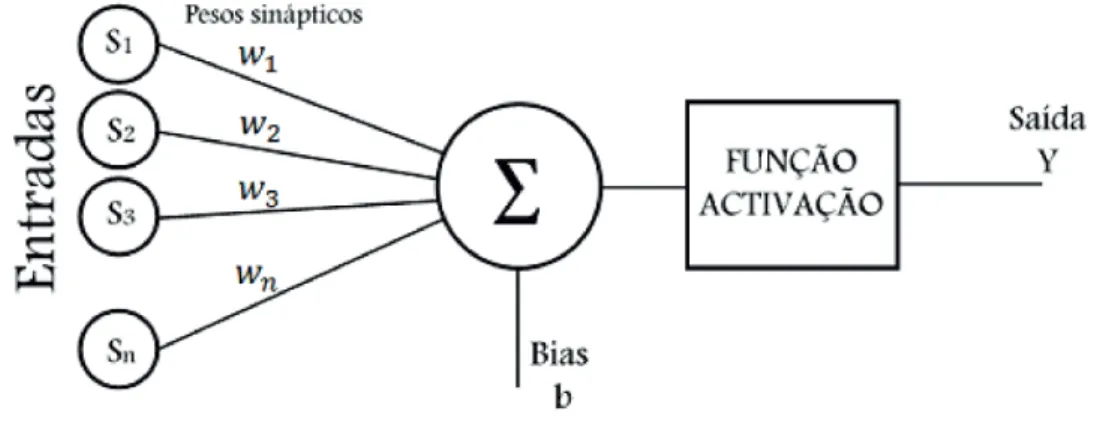
3.1 Diagrama de Blocos de um Neur´onio Perceptron . . . 54
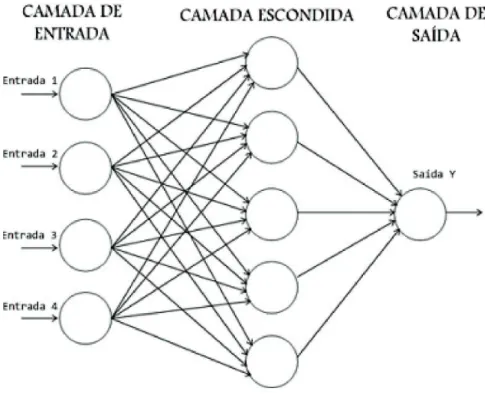
3.2 Diagrama de Multi Layer Perceptron . . . 55
4.1 Arquitetura do Sistema . . . 69 xxi
4.2 Interface DriverWifi . . . 70
4.3 Classe Basic Measure . . . 71
4.4 Ilustra¸c˜ao de M´ultiplos Fingerprint Maps . . . 80
4.5 Representa¸c˜ao UML da classe Composite Point . . . 82
4.6 Aplica¸c˜ao LEAPin - Fase Offline . . . 84
4.7 Aplica¸c˜ao LEAPin - Teste de Algoritmos de Estima¸c˜ao de Localiza¸c˜ao 86
4.8 Exemplo de Pondera¸c˜ao dos Mapas . . . 93
5.1 Ilustra¸c˜ao dos Pontos do Fingerprint Map . . . 106
5.2 Zona de Ensaio Exterior. (Google Maps) . . . 115
5.3 Resultados - Ensaio Exterior e Exterior . . . 117
5.4 Ilustra¸c˜ao da Grelha de Pontos do Fingerprint Map para o Ensaio no 4118
5.5 Exemplo da Aplica¸c˜ao de Simula¸c˜ao . . . 129
5.6 Resultados das componentes do mapa - Desvio Padr˜ao vs RSS . . . . 133
5.7 Desvio Padr˜ao vs RSS (Fingerprint Map) . . . 133
5.8 Gr´afico M´edia de Desvios Padr˜ao . . . 134
5.9 T´ecnica Ponto-a-Ponto - (Esquerda-Esperado) (Direita-Resultado) . 148
5.10 T´ecnica Dead Reckoning - (Esquerda-Esperado) (Direita-Resultado) 148
5.11 Erro em cada Ponto do Percurso - (Esquerda-Ponto-a-Ponto) (Direita-Dead Reckoning) . . . 148
5.12 Erro em cada Ponto do Percurso - (Esquerda-Ponto-a-Ponto) (Direita-Dead Reckoning) . . . 149
6.1 Exemplo da t´ecnica de Triangula¸c˜ao . . . 156
abreviaturas
Lista de acr´
onimos
Sigla Expans˜ao AoA Angle of Arrival AP Access Point
API Application Programming Interface CERP Circular Error Probability
DR Dead Reckoning
ESA European Space Agency FM Fingerprint Maps
GPS Global Positioning System
GSM Global System for Mobile Communications IEEE Institute of Electrical and Electronics Engineers IrDA Infrared Data Association
LBS Location Based Services
LEA Location Estimation Algorithms LORAN LOng RAnge Navigation
Sigla Expans˜ao LOS Line-of-Sight
MAC Medium Access Control MLP Multilayer Perceptron NLOS non-Line-of-Sight RF Radio Frequency
RFID Radio Frequency Identification RMSE Root Mean Square Error RSS Received Signal Strength
RSSi Received Signal Strength Indicator SNR Signal-to-Noise Ratio
SSID Service Set Identifier ToA Time of Arrival
TDoA Time Diference of Arrival EU European Union
UML Unified Modeling Language USB Universal Serial Bus
Lista de abreviaturas
Abreviatura Significado(s) e.g. por exemplo et al. e outros (autores) etc. etecetera, outros i.e. isto ´e, por conseguinte
(continua na p´agina seguinte)
vid. veja-se, ver
vs. versus, por compara¸c˜ao com
1
Introdu¸c˜
ao
1.1
Hist´
oria da Localiza¸c˜
ao
Uma das preocupa¸c˜oes mais antigas do homem foi conseguir responder `a pergunta ”Onde estou?” para que este possa encontrar o caminho certo por onde seguir de acordo com os seus objetivos. A localiza¸c˜ao de qualquer pessoa, ou bem, tem uma dependˆencia direta de referˆencias sejam estas ruas, rios, estradas, edif´ıcios, lugares de interesse ou at´e mesmo caracter´ısticas geol´ogicas. As referˆencias podem ser obtidas atrav´es do dom´ınio de no¸c˜oes de georreferencia¸c˜ao, isto ´e, latitude e longitude, com equipamentos GPS (Global Positioning System) ou pela interpreta¸c˜ao de cartas topogr´aficas, mapas e plantas. A eterna vontade do homem saber a sua posi¸c˜ao, nunca se extinguiu, mas a forma de como esta ´e determinada e ´e caracterizada foi alterada. Mudaram os recursos, instrumentos/equipamentos, as caracter´ısticas do espa¸co e mudam tamb´em as referˆencias para a localiza¸c˜ao e orienta¸c˜ao.
Atualmente gra¸cas ao sistema de GPS ´e poss´ıvel determinar a posi¸c˜ao de um ser humano em virtualmente qualquer posi¸c˜ao do globo, sempre com algum grau de erro associado, dependendo da disponibilidade dos recursos necess´arios para a obten¸c˜ao de localiza¸c˜ao [1].
Os prim´ordios da localiza¸c˜ao atrav´es de instrumentos s˜ao marcados pelo astrol´abio cujas origens s˜ao atribu´ıdas `a Gr´ecia antiga [2]. A etimologia da palavra astrol´abio descreve bem a sua utilidade e a sua raz˜ao de ser, sendo que ´e origin´aria do grego astron, astro/estrela e labein domar/tomar, ou seja, o astrol´abio serve para determinar a posi¸c˜ao ou localiza¸c˜ao do seu utilizador atrav´es de recursos celestes. Mais tarde, este instrumento permitia aos navegadores da Idade M´edia determinar, atrav´es de f´ormulas e conceitos matem´aticos, a altura de um astro relativamente ao horizonte, realizar cartografia astr´onoma e fornecer um calend´ario perp´etuo. Tornou-se ent˜ao um instrumento de extrema importˆancia na determina¸c˜ao com algum grau de precis˜ao e exatid˜ao a sua localiza¸c˜ao [3]. Seria mais tarde substitu´ıdo pelo quadrante, muito utilizado pelos navegadores portugueses, na ´epoca dourada dos descobrimentos [3].
O quadrante permitia determinar a distˆancia entre o ponto de partida da embarca¸c˜ao e o local onde esta se encontrava, atrav´es da determina¸c˜ao da altura da Estrela Polar. Contudo n˜ao demorariam mais de 300 anos para que se desse uma nova evolu¸c˜ao deste tipo de instrumentos. Um oficial da marinha britˆanica, em 1957 cria um novo instrumento chamado sextante, que vinte anos mais tarde teria um aperfei¸coamento providenciado por Tomaz Godfrey [3]. O sextante tem como objectivo medir a abertura angular na vertical entre um astro e a linha do horizonte para fins de c´alculo da posi¸c˜ao [3]. Gra¸cas `a sua importˆancia hist´orica na determina¸c˜ao da posi¸c˜ao dos navios no mar, o sextante ´e, ainda hoje, o s´ımbolo m´aximo da navega¸c˜ao mar´ıtima. Esses instrumentos foram os b´asicos da navega¸c˜ao e posicionamento, at´e o in´ıcio do s´eculo XX, quando v´arios sistemas de navega¸c˜ao baseados em radiocomunica¸c˜oes emitidas de esta¸c˜oes situadas em pontos conhecidos foram desenvolvidos. Os Estados Unidos entre 1940 e 1943 dedicaram-se ao desenvolvimento do sistema LORAN (LOng RAnge Navigation) [4], um sistema de navega¸c˜ao hiperb´olico baseado em sinais modulados sincronizados recebidos pelos sistemas que pretenderiam obter localiza¸c˜ao. Este sistema foi substitu´ıdo na d´ecada de 70 por outro mais simples e mais preciso com o nome de OMEGA. O sistema OMEGA [5], foi desenvolvido para uso militar mas foi rapidamente transposto para o uso civil. Tornou-se assim
1.1. HIST ´ORIA DA LOCALIZAC¸ ˜AO 3
o primeiro sistema de radionavega¸c˜ao utiliz´avel em praticamente qualquer ponto da superf´ıcie terrestre. O sistema de localiza¸c˜ao OMEGA ´e baseado na t´ecnica de triangula¸c˜ao. Com a utiliza¸c˜ao de 8 transmissores, a baixa frequˆencia, cada um deles a uma grande distˆancia dos outros, era poss´ıvel, em qualquer ponto do globo terrestre, uma esta¸c˜ao receptora captar o sinal transmitido de, pelo menos, trˆes das esta¸c˜oes. O posicionamento era obtido partindo de um modelo hiperb´olico de linhas de posi¸c˜ao determinadas pela compara¸c˜ao da fase dos sinais recebidos pela esta¸c˜ao receptora. O fim da utiliza¸c˜ao do OMEGA, devido `a crescente ades˜ao a sistemas com recurso a sat´elites, chega a 30 de Setembro de 1997, data na qual s˜ao cessadas todas as emiss˜oes de sinais OMEGA [5]. Este acontecimento marca o advento do maior e mais preciso sistema de georreferencia¸c˜ao at´e `a data, o Global Positioning System (GPS).
Os Estados Unidos da Am´erica foram os pioneiros no desenvolvimento de um sistema de sat´elites capaz de transmitir sinais para receptores na superf´ıcie terrestre ou em voo, podendo assim determinar com elevada precis˜ao a sua posi¸c˜ao, velocidade e dire¸c˜ao. Existem outras iniciativas de desenvolvimento de sistemas semelhantes, como o GALILEO desenvolvido pela Uni˜ao Europeia (UE) e pela Agˆencia Espacial Europeia (ESA), o GLONASS da R´ussia e o sistema COMPASS da China. O GALILEU dever´a estar em pleno funcionamento em 2020 de para fornecer informa¸c˜ao de posicionamento a todos os europeus, segundo a ESA [6]. O GPS [1], no entanto, cujos primeiros sat´elites foram lan¸cados entre 1978 e 1985, inicialmente, tinha seu uso restrito ao emprego militar. A dezembro de 1993, foi aberta a sua utiliza¸c˜ao civil, e o sistema GPS foi considerado estar completamente operacional em 1995 [1]. Inicialmente, o sinal do GPS para uso civil era propositadamente degradado por meio de um dispositivo denominado de ”disponibilidade seletiva” (SA), o que possibilitava uma precis˜ao de localiza¸c˜ao de no m´ınimo 100 metros. No entanto, a partir de 2000 esse dispositivo foi inabilitado, passando a precis˜ao a ser determinada apenas pelo desempenho do sistema e a qualidade do receptor, o que pode chegar a poucos metros de erro da posi¸c˜ao verdadeira [1].
em 6 planos de ´orbita com 4 sat´elites por ´orbita. Existem outros sat´elites, entre dois a cinco, que s˜ao utilizados como reserva ao sistema, criando assim redundˆancia `a constela¸c˜ao. A cada 12 horas, os sat´elites completam uma ´orbita em torno da Terra o que faz com que a qualquer momento e em qualquer ponto da Terra sem obst´aculos, um esta¸c˜ao com capacidades receptivas possa receber os sinais de 7 sat´elites ao mesmo tempo [1]. O sucesso destes sistemas de localiza¸c˜ao em espa¸cos exteriores, serve de encorajamento para investigadores para aplicarem alguns destes princ´ıpios na tentativa de obten¸c˜ao de informa¸c˜ao geogr´afica num ambiente interior.
Com esta preposi¸c˜ao em mente, concentram-se atualmente esfor¸cos numa ´area `a qual se d´a o nome de Sistemas de Localiza¸c˜ao Indoor, na qual est´a inserida esta disserta¸c˜ao.
1.2
Motiva¸c˜
ao
Na atual competi¸c˜ao feroz de mercado, ´e natural uma constante procura de novas oportunidades ou estrat´egias para atrair novos clientes e aumentar lucros das empresas que utilizem tecnologia m´ovel.
Nesta era de competi¸c˜ao significativa de telecomunica¸c˜oes, operadores de redes m´oveis continuamente procuram formas inovadoras de se destacar e aumentar os seus proveitos. Com o aumento do poder computacional e da miniaturiza¸c˜ao da electr´onica de consumo, surge uma maior necessidade de ubiquidade de servi¸cos. Desde sempre o homem procurou novas oportunidades quer seja por necessidade ou extravagˆancia que possam melhorar as suas condi¸c˜oes ou fornecer lucro. Com esta presen¸ca ubiqua de servi¸cos para o consumidor, uma grande fatia do mercado recai sobre servi¸cos baseados em localiza¸c˜ao chamados Location Based Services (LBS).
Os LBS, s˜ao definidos em [7] como servi¸cos que utilizam a localiza¸c˜ao do dispositivo m´ovel do utilizador para lhe fornecer informa¸c˜oes personalizadas ou servi¸cos espec´ıficos dependendo dessa mesma localiza¸c˜ao.
1.2. MOTIVAC¸ ˜AO 5
As duas principais ac¸c˜oes dos LBS s˜ao a obten¸c˜ao da localiza¸c˜ao do utilizador e utilizando esta informa¸c˜ao providenciar um determinado servi¸co [8]. Estas duas ac¸c˜oes s˜ao utilizadas para responder a algumas quest˜oes essenciais inerentes aos LBS como:
• Onde ´e que estou?
• Onde ´e o ... mais pr´oximo?
• Onde est´a o meu ...
• Como ´e que eu chego a ...
Inicialmente a tentativa de determina¸c˜ao da localiza¸c˜ao baseava-se apenas para servi¸cos denominados de outdoor, como o de servi¸co de Enhanced 911 (E-911) [9] mas hoje os esfor¸cos viram-se cada vez mais para o fornecimento de servi¸cos em ambientes indoor. Existe um grande potencial para a aposta e crescimento destes servi¸cos, basta pensar que Portugal, segundo o Di´ario Econ´omico Portuguˆes, em 2012 tinha uma penetra¸c˜ao de servi¸co m´ovel de 156% o que implica a utiliza¸c˜ao de smartphone com os mais diversos tipos de aplica¸c˜oes. Para a utiliza¸c˜ao destes servi¸cos ´e necess´aria a obten¸c˜ao da localiza¸c˜ao do terminal m´ovel, e sempre que ´e discutida a tem´atica de localiza¸c˜ao o primeiro sistema a considerar ´e o GPS. Apesar do GPS ser uma tecnologia bem afirmada e precisa, n˜ao tem um funcionamento universal, isto ´e, em ambientes fechados, diga-se indoor, esta tecnologia fica muito aqu´em em termos de precis˜ao e exatid˜ao necess´arios havendo espa¸cos onde ´e imposs´ıvel utilizar.
Esfor¸cos tˆem vindo a ser feitos nesta ´area para obter alguma forma ou modelo da posi¸c˜ao sem recurso ao GPS. As t´ecnicas de posicionamento por sinais electromagn´eti-cos apresentam tamb´em elas problemas inerentes `a sua utiliza¸c˜ao como: reflex˜oes, refrac¸c˜oes, interferˆencia multi-caminho, absor¸c˜ao do corpo humano de sinais r´adio, entre outras [10].
Uma das t´ecnicas que se revela bastante promissora nesta tem´atica ´e o m´etodo de an´alise de cena por fingerprint, e tem algumas vantagens e desvantagens. Sabendo que um dos factores que causa erros de localiza¸c˜ao com a utiliza¸c˜ao destas t´ecnicas s˜ao obst´aculos, que tapam a linha-de-vista, este trabalho tem como objectivo mitigar parte desses erros. Um dos factores causadores de erro de localiza¸c˜ao ´e a pr´opria orienta¸c˜ao do terminal m´ovel. Para melhorar a exatid˜ao e precis˜ao das tradicionais t´ecnicas de Fingerprint, com este trabalho, pretende adicionar-se aos FM informa¸c˜ao de orienta¸c˜ao do utilizador. Para a obten¸c˜ao da localiza¸c˜ao do terminal m´ovel s˜ao usados Location Estimation Algorithms (LEA) de entre os quais se podem encontrar v´arios tipos com caracter´ısticas e t´ecnicas pr´oprias. Um dos objectivos deste projecto passa por realizar uma an´alise e implementa¸c˜ao de LEA baseados em modelos probabil´ısticos usando o teorema de Bayes. Existem LBS que necessitam de realizar um rastreamento cont´ınuo dos terminais m´oveis aos quais lhe ser˜ao fornecidos os servi¸cos. A estes sistemas ´e dada a designa¸c˜ao de tracking. Este trabalho conta tamb´em com a adi¸c˜ao e teste de t´ecnicas de Dead Reckoning a um sistema de tracking. Para a realiza¸c˜ao do ensaios deste trabalho ser´a tipicamente usado um smartphone com sistema operativo Android. Existem bibliotecas j´a desenvolvidas em trabalhos anteriores como s˜ao os casos dos apresentados em [11,12] que contˆem a base para a cria¸c˜ao de um sistema de fingerprinting. Estas bibliotecas n˜ao s˜ao compat´ıveis com o sistema operativo Android pelo que este trabalho passa tamb´em por fazer o porting de todo este trabalho mantendo sempre a compatibilidade com os sistemas anteriores.
1.3
Contribui¸c˜
ao
Este trabalho foi elaborado de forma a poder realizar uma contribui¸c˜ao em v´arias vertentes todas dentro do contexto da localiza¸c˜ao indoor. As principais contribui¸c˜oes deste trabalho s˜ao:
• Fingerprint Maps (FM) com informa¸c˜ao de orienta¸c˜ao: Provar que ´e poss´ıvel melhorar a precis˜ao e exatid˜ao da obten¸c˜ao da localiza¸c˜ao por Fingerprinting
1.3. CONTRIBUIC¸ ˜AO 7
atrav´es da utiliza¸c˜ao de FM com informa¸c˜ao de orienta¸c˜ao do terminal m´ovel. • Plataforma para captura e teste de dados: Foi criada uma aplica¸c˜ao Android capaz de capturar e guardar amostras para a cria¸c˜ao dos Fingerprint Maps e para realizar testes sobre os mesmos.
• M´etodo Probabil´ıstico : Testar e avaliar um LEA baseado em modelos probabil´ıs-ticos e o teorema Bayesiano comparando os resultados obtidos com LEA cl´assicos como o Nearest Neighbour.
• Tracking com Dead Reckoning: Obter informa¸c˜oes de percursos percorridos por terminais m´oveis com informa¸c˜ao de posi¸c˜oes pr´evias (Dead Reckoning) usando LEA probabil´ısticos comparando os resultados obtidos com m´etodos ponto-a-ponto.
• Simula¸c˜ao de FM com orienta¸c˜ao: Usando uma ferramenta de simula¸c˜ao de FM, que pode ser encontrada no trabalho apresentado por Lu´ıs Reigoto em [13], adicionou-se informa¸c˜ao de orienta¸c˜ao aos FM com o objectivo de aumentar a exatid˜ao e precis˜ao dos resultados de posicionamento do terminal m´ovel.
• Porting das bibliotecas dos trabalhos apresentados em [11,12]: Fez-se o porting das bibliotecas j´a implementadas em trabalhos anteriores para funcionarem em sistema operativo Android, tendo assim uma API para poder ser usada na cria¸c˜ao de futuras aplica¸c˜oes.
Atrav´es de todas as contribui¸c˜oes acima descritas foi poss´ıvel obter um ganho de performance de at´e 40% ao n´ıvel de exatid˜ao com a utiliza¸c˜ao de FM orientados e LEA probabil´ısticos, mantendo os n´ıveis de precis˜ao, quando comparado com valores obtidos nas mesmas condi¸c˜oes com algoritmos cl´assicos como os de Nearest Neighbour. Os LEA probabil´ısticos revelaram ter resultados, de uma forma geral, melhores do que aqueles encontrados com a utiliza¸c˜ao de algoritmos cl´assicos. A simula¸c˜ao dos FM com orienta¸c˜ao revelou ser um m´etodo com um elevado potencial uma vez no melhor caso obteve-se um erro m´edio de 1,3812 metros com um desvio
padr˜ao de 0,7994, valor muito pr´oximo com aqueles que s˜ao obtidos com o FM cl´assico aproximadamente nas mesmas condi¸c˜oes. Com a utiliza¸c˜ao da t´ecnica de Dead Reckoning, poss´ıvel apenas com a utiliza¸c˜ao de LEA probabil´ısticos, em tracking indoor ´e poss´ıvel ver tamb´em uma melhoria de performance de cerca de 0,32m, melhorando tamb´em a precis˜ao dos resultados, quando comparado com o sistema de tracking indoor ponto-a-ponto.
1.4
Organiza¸c˜
ao da disserta¸c˜
ao
Esta disserta¸c˜ao encontra-se estruturada em seis cap´ıtulos. No presente cap´ıtulo fez-se uma introdu¸c˜ao `as t´ecnicas, metodologias e hist´oria da localiza¸c˜ao e aprefez-sentou-fez-se tamb´em a motiva¸c˜ao do trabalho.
No cap´ıtulo 1 ´e feita uma introdu¸c˜ao ao tema, descrevendo uma breve hist´oria dos sistemas de localiza¸c˜ao, qual a motiva¸c˜ao para este trabalho e qual a sua contribui¸c˜ao.
No cap´ıtulo 2s˜ao descritas as diferentes caracter´ısticas dos sistemas de localiza¸c˜ao, as metodologias utilizadas e as medidas de performance mais comuns das t´ecnicas de localiza¸c˜ao.
As t´ecnicas de an´alise de cena mais concretamente de Fingerprinting s˜ao descritas e analisadas no cap´ıtulo 3desta disserta¸c˜ao.
O cap´ıtulo 4 ´e a apresentada a concep¸c˜ao e implementa¸c˜ao do trabalho realizado onde s˜ao apresentados os conceitos de FM m´ultiplos e a sua utiliza¸c˜ao, o m´etodo probabil´ıstico utilizado como algoritmo de estima¸c˜ao de localiza¸c˜ao e os modelos de tracking simples e com a utiliza¸c˜ao de t´ecnicas de Dead Reckoning.
Os ensaios e resultados s˜ao apresentados no cap´ıtulo5e a finalizar esta disserta¸c˜ao, no cap´ıtulo6, faz-se uma discuss˜ao dos principais resultados obtidos, s˜ao apresentadas as respectivas conclus˜oes e s˜ao descritas algumas possibilidades de trabalho futuro.
2
Sistemas de Localiza¸c˜
ao
Os sistemas de localiza¸c˜ao s˜ao tais que a partir de informa¸c˜oes que possam caracterizar a posi¸c˜ao de um determinado terminal m´ovel conseguem fornecer uma localiza¸c˜ao aproximada da mesma.
Este processo ´e normalmente denominado como geolocation, location sensing, radio location, position location, localization, ou apenas por localiza¸c˜ao [14, 15]. Nesta sec¸c˜ao e subsec¸c˜oes s˜ao abordadas as principais caracter´ısticas destes sistemas, as metodologias por estes adotadas e refere-se tamb´em a alguns dos principais avan¸cos e trabalhos relacionados que podem ser encontrados na literatura.
2.1
Caracter´ısticas de um Sistema de Localiza¸c˜
ao
S˜ao in´umeras as caracter´ısticas que s˜ao inerentes a qualquer sistema de localiza¸c˜ao e que s˜ao pr´e-requisitos para a elabora¸c˜ao e implementa¸c˜ao de um sistema deste tipo. De acordo com o tipo de sistema de localiza¸c˜ao e os recursos dispon´ıveis, as principais caracter´ısticas s˜ao:
• Posi¸c˜ao F´ısica e Posi¸c˜ao Simb´olica
- Posi¸c˜ao F´ısica: Cada ponto descritivo de uma posi¸c˜ao ´e representada atrav´es de um sistema de coordenadas geogr´aficas como latitude, longitude e altitude, ou por um sistema de coordenadas cartesianas bi ou tri-dimensional (x,y,z).
- Posi¸c˜ao Simb´olica: Cada uma das zonas onde se pretende obter localiza¸c˜ao ´e caracterizada n˜ao por uma posi¸c˜ao f´ısica mas sim por uma etiqueta e.g. ”Andar 2 - Sala 2.18” [16].
• Referencia¸c˜ao Absoluta ou Relativa
- Referˆencia Absoluta: Uma referˆencia ´e absoluta quando qualquer que seja a posi¸c˜ao do terminal m´ovel no espa¸co, o seu referencial seja sempre o mesmo para qualquer sistema. O melhor exemplo deste caso ´e o GPS que utiliza um sistema de referencia¸c˜ao absoluto. As coordenadas do GPS s˜ao sempre em formato geogr´afico sendo caracterizadas por posi¸c˜ao de latitude, longitude e altitude qualquer que seja a posi¸c˜ao no globo terrestre.
- Referˆencia Relativa: Em contraste com a referˆencia absoluta, num sistema que utilize referˆencia relativa, n˜ao possui um referencial global sendo descrito apenas para o sistema em quest˜ao. Este tipo de sistemas ´e muito comum em t´ecnicas por fingerprint em que as localiza¸c˜oes poss´ıveis de um terminal m´ovel s˜ao definidas tendo em conta uma origem de um referencial, normalmente o ponto (0,0) como uma posi¸c˜ao pr´e-definida [16].
• Exatid˜ao e Precis˜ao
- Para al´em de serem consideradas como caracter´ısticas de um sistema de localiza¸c˜ao, s˜ao tamb´em consideradas como as principais medidas de avalia¸c˜ao de qualidade. A precis˜ao est´a relacionada com a proximidade de resultados de v´arias medi¸c˜oes [17]. Quanto menor for o desvio padr˜ao do conjunto de resultados mais exacto ´e o sistema de localiza¸c˜ao em termos percentuais. Um sistema pode ser preciso mas n˜ao ´e necess´ariamente exacto visto que os resultados obtidos podem estar compreendidos num intervalo muito curto
2.1. CARACTER´ISTICAS DE UM SISTEMA DE LOCALIZAC¸ ˜AO 11
mas estarem muito longe do valor esperado. A exactid˜ao mede exactamente este ´ultimo. Quanto menor for erro de um resultado obtido considerando o resultado esperado num problema de localiza¸c˜ao maior ser´a a exactid˜ao do mesmo. Obviamente que um bom sistema de localiza¸c˜ao necess´ariamente ter´a que ter ao mesmo tempo exactid˜ao e precis˜ao [16].
• Capacidade de Reconhecimento
- Esta caracter´ıstica est´a normalmente associada a sistemas de localiza¸c˜ao por cˆamara v´ıdeo, ou imagem, onde pode ser identificado n˜ao s´o a posi¸c˜ao da pessoa mas tamb´em a sua identidade. Este conceito pode ser alargado a qualquer outro tipo de sistema de localiza¸c˜ao [15].
• C´alculo Local ou Remoto
- Quando o c´alculo da estima¸c˜ao da posi¸c˜ao ´e feita no pr´oprio terminal m´ovel estamos presente um sistema de localiza¸c˜ao local e, em contraste, caso a obten¸c˜ao da localiza¸c˜ao seja feita num outro sistema que n˜ao o terminal m´ovel e esta informa¸c˜ao lhe seja posteriormente transmitida d´a-se-lhe a designa¸c˜ao de sistema de localiza¸c˜ao remoto [16].
• Granularidade Espacial
- A granularidade espacial pode ser definida como o n´umero de pontos distintos e poss´ıveis de localiza¸c˜ao numa determinada ´area. Diferentes sistemas necessitam de diferentes n´ıveis de granularidade espacial. A obten¸c˜ao da localiza¸c˜ao de uma impressora num edif´ıcio requere uma granularidade espacial inferior `a de a tentativa de localiza¸c˜ao de um livro numa biblioteca. Um sistema com uma granularidade espacial elevada tem que ter for¸cosamente uma precis˜ao tamb´em ela elevada.
• Custos e Tempo
- O custo destes sistemas est´a associado ao custo da sua implementa¸c˜ao ou instala¸c˜ao, infra-estrutura e recursos necess´arios ao seu funcionamento como por exemplo o terminal m´ovel. O tempo de implementa¸c˜ao ´e definido como
sendo o tempo necess´ario para entrega de um sistema de localiza¸c˜ao desde o ´ınicio do seu projecto. O tempo de execu¸c˜ao ´e o tempo que um determinado sistema demora desde o momento em que ´e solicitada informa¸c˜ao de localiza¸c˜ao at´e que esta fica realmente dispon´ıvel [15,16].
• Escalabilidade
- Refere-se `a capacidade de um sistema de localiza¸c˜ao para aumentar a sua `area de abrangˆencia, isto ´e, ser capaz de fornecer correctamente informa¸c˜ao de localiza¸c˜ao precisa num espa¸co superior tendo assim uma cobertura maior do servi¸co fornecido [15].
• Privacidade
- A privacidade consiste no fornecimento da garantia que um utilizador de um sistema de localiza¸c˜ao possa permanecer an´onima. Esta quest˜ao pode ser vista a partir de dois pontos: um utilizador pode querer manter anonimato para n˜ao facultar informa¸c˜oes suas a terceiros que o possam vir a prejudicar, mas no entanto, caso seja um sistema de apoio a uma vitima a anonimidade pode tornar-se problem´atica [15, 18, 19].
• Seguran¸ca
- A seguran¸ca ´e uma caracter´ıstica bastante importante nos sistemas de localiza¸c˜ao e presup˜oe n˜ao s´o a seguran¸ca dos dados do utilizador mas tamb´em a garantia do barramento do acesso a pessoas n˜ao autorizadas ao sistema [15, 18].
• Limita¸c˜oes
- Todo e qualquer sistema possui limita¸c˜oes que devem ser expostas. Um exemplo cl´assico ´e a falta de penetra¸c˜ao dos sinais de GPS para ambientes indoor o que torna este sistema como n˜ao sendo o mais indicado para resolver o problema de localiza¸c˜ao.
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 13
2.2
Metodologias de Localiza¸c˜
ao
Os sistemas de localiza¸c˜ao s˜ao definidos como sendo sistemas capazes de fornecer, atrav´es dos seus recursos, uma localiza¸c˜ao a um terminal m´ovel que pretenda ser encontrado. Este sistema deve ser capaz de efetuar todos os c´alculos necess´arios para que a estima¸c˜ao da posi¸c˜ao possa ser obtida. Devem portanto existir metodologias para que seja realizado o processo de obten¸c˜ao de localiza¸c˜ao a partir de um conjunto de referˆencias conhecidas [14, 15].
Existem v´arios autores que dividem as metodologias de localiza¸c˜ao em diversos grupos segundo as suas caracter´ısticas e modelos para obten¸c˜ao de posi¸c˜ao. A mais usual e aceite na literatura ´e a de J. Hightower et al., em [20], que faz a parti¸c˜ao das metodologias em trˆes grandes grupos, localiza¸c˜ao usando triangula¸c˜ao, localiza¸c˜ao usando proximidade e localiza¸c˜ao atrav´es de an´alise de cena, sendo estas posteriormente divididas nos seus respectivos subgrupos.
2.2.1
Triangula¸c˜
ao
A t´ecnica de Triangula¸c˜ao consiste em usar as propriedades geom´etricas dos triˆangu-los para poder obter uma estima¸c˜ao da localiza¸c˜ao do terminal m´ovel e esta t´ecnica pode ser subdivida em latera¸c˜ao e angula¸c˜ao. O c´alculo da posi¸c˜ao do terminal m´ovel ´e feito, no caso da latera¸c˜ao, atrav´es de rela¸c˜oes entre distˆancias entre o mesmo e um conjunto de referˆencias enquanto que, no que toca a angula¸c˜ao, s˜ao utilizados ˆangulos para a concretiza¸c˜ao do mesmo objectivo [20].
• Latera¸c˜ao
A Latera¸c˜ao ´e uma t´ecnica inserida no grupo de Triangula¸c˜ao que, atrav´es das distˆancias entre o objecto/dispositivo a localizar e as referˆencias presentes no sistema, consegue obter a sua posi¸c˜ao. Existem duas abordagens para realizar latera¸c˜ao, sendo que a primeira delas chamada Latera¸c˜ao Circular consiste em determinar um ponto ou zona de intercep¸c˜ao de v´arias circunferˆencias
centradas nas referˆencias e de raio igual ao valor da distˆancia entre as mesmas e o terminal m´ovel. Esta abordagem ´e ilustrada na Figura2.1.
Figura 2.1 – Latera¸c˜ao Circular [21].
A segunda abordagem ´e conhecida como Latera¸c˜ao Hiperb´olica [21] e consiste em tra¸car v´arias hip´erboles com dois focos centrados em cada par de referˆencias, sendo a localiza¸c˜ao do terminal m´ovel obtida no ponto de intercep¸c˜ao das v´arias hip´erboles. Esta t´ecnica ´e ilustrada na Figura 2.2.
Em qualquer uma das abordagens s˜ao necess´arias pelo menos 3 referˆencias quando estamos perante uma tentativa de obten¸c˜ao de localiza¸c˜ao num cen´ario a 2 dimens˜oes. No caso de se tratar de um cen´ario em que se pretenda obter a localiza¸c˜ao tridimensional de um terminal m´ovel s˜ao necess´arias pelo menos 4 referˆencias n˜ao pertencentes ao mesmo plano, isto ´e n˜ao complanares.
Para a obten¸c˜ao dos valores de distˆancia necess´arios para a utiliza¸c˜ao das t´ecnicas de latera¸c˜ao existem pelo menos quatro formas diferentes sendo estas:
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 15
Figura 2.2 – Latera¸c˜ao Hiperb´olica [21].
Diretamente
Neste m´etodo de obten¸c˜ao de distˆancia, ´e feita uma medi¸c˜ao direta por a¸c˜ao mecˆanica ou movimento. Uma medi¸c˜ao com uma fita m´etrica entre o terminal m´ovel e as referˆencias ´e um bom exemplo da utiliza¸c˜ao deste m´etodo. Este ´e um processo bastante simples de perceber mas n˜ao ´e de todo pratic´avel para grandes distˆancias [20].
Time of Arrival - ToA (Tempo de Chegada)
Baseia-se na medi¸c˜ao do tempo de chegada de um sinal transmitido por um terminal m´ovel at´e `as referˆencias ou vice versa. Estes sistemas baseados em tempo de voo s˜ao bastante precisos. Tendo em conta que a velocidade de propaga¸c˜ao de ondas electromagn´eticas no vazio ´e muito semelhante com a da velocidade da luz temos que:
ent˜ao, ´e poss´ıvel calcular a distˆancia entre o ponto de recep¸c˜ao do sinal sabendo o ponto de origem e o tempo de propaga¸c˜ao entre ambos [20].
Sabendo a velocidade de propaga¸c˜ao e o tempo medido ´e poss´ıvel calcular a distˆancia entre o terminal m´ovel e as referˆencias. Considere-se um objecto A que pretende ser localizado, e RefA, RefB e RefC cada uma das necess´arias
referˆencias, as distˆancias d1A, d1B, d1C s˜ao as respectivas distˆancias a calcular.
O tempo de voo de A para cada uma das referencias ´e dado pela diferen¸ca entre o instante no qual ´e enviado o sinal (tp) a partir de A e o instante em que este
mesmo sinal chega `a referˆencia (tc). Pode ser visto como:
t = (tc) − (tp)(s) (2.2)
Com o valor do tempo de voo conhecido, ´e poss´ıvel ent˜ao calcular cada uma distˆancias atrav´es de:
d = c × t(m) (2.3)
Onde:
– d ´e a distˆancia em metros
– c ´e a velocidade de propaga¸c˜ao do sinal r´adio em metros por segundo – t ´e o tempo de voo em segundos
Conhecendo os valores das distˆancias d entre o terminal m´ovel e todas as referˆencias, pode utilizar-se latera¸c˜ao circular para obter a sua localiza¸c˜ao. Para isso devem ser elaboradas circunferˆencias de raio igual `as distˆancias d obtidas para cada referˆencia com centro na posi¸c˜ao de cada uma destas. A intercep¸c˜ao destas circunferˆencias resulta no ponto ou ´area onde se encontra o dispositivo que se pretende localizar. Uma das principais limita¸c˜oes deste m´etodo ´e o facto de ter que existir processos de sincronismo bastante precisos de todas as referˆencias porque ligeiros erros de sincronismo podem gerar grandes erros de localiza¸c˜ao. Um erro de 100ns tipicamente resulta num erro de cerca
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 17
de 30 metros. Esta t´ecnica ´e utilizada pelo sistema de Global Positioning System (GPS).
Time Difference of Arrival - TDoA (Tempo de Chegada Relativo)
Existe na literatura duas formas distintas de TDoA nas quais difere o conceito de relatividade do tempo de chegada. Na primeira metodologia a relatividade encontra-se na diferen¸ca do tempo de chegada de um sinal a partir de duas referˆencias do sistema. Na segunda metodologia de TDoA ´e medida a diferen¸ca do tempo de chegada entre dois sinais de duas tecnologias distintas, por exemplo, sinais sonoros e sinais r´adio. De seguida ´e feita uma pequena explica¸c˜ao destas duas metodologias.
O primeiro processo utiliza como parˆametro de entrada o tempo de chegada de um sinal vindo a partir do terminal m´ovel, a duas referˆencias distintas. Desta forma ´e necess´aria apenas a sincroniza¸c˜ao das referˆencias tornando o processo mais f´acil e exequ´ıvel. A Figura 2.2 mostra como este processo ´e implementado. Considerando X como sendo o dispositivo a localizar, e assumindo que transmite um sinal que demora tA a chegar `a referˆencia A
e tB `a referˆencia B, a diferen¸ca de tempo ´e dada por:
T DoAB−A = | tB− tA| = k (2.4)
Pode portanto usar-se o valor de T DoAB−A para elaborar uma hip´erbole como os focos em ambas as referˆencias. A hip´erbole resultante representa todos os poss´ıveis lugares no plano XY cujas distˆancias ´e k, representado ent˜ao todas as localiza¸c˜oes poss´ıveis do objecto X o qual se pretende localizar. Esta conclus˜ao pode ser obtida a partir de:
| dX−B− dX−A| = k(c) (2.5)
Sendo que c ´e a velocidade de propaga¸c˜ao das ondas electromagn´eticas no vazio, 3 × 108, a posi¸c˜ao aproximada de X ´e um ponto da hip´erbole mas n˜ao ´e
a localiza¸c˜ao do terminal m´ovel. Para fazer esta especifica¸c˜ao ´e necess´aria a utiliza¸c˜ao de mais uma hip´erbole com a adi¸c˜ao da referˆencia C. Repetem-se agora os passos anteriores mas para T DoAC−A e T DoAC−B. Vem que:
T DoAC−A = | tC − tA| = k1 (2.6)
T DoAC−B = | tC − tB | = k2 (2.7)
Ent˜ao, da mesma forma, o terminal m´ovel X encontra-se nas seguintes hip´erboles:
| dX−C − dX−A| = k1(c) (2.8)
| dX−C − dX−B | = k2(c) (2.9)
A intercep¸c˜ao destas hip´erboles resulta teoricamente, no ponto onde se encontra o terminal mas, na maioria dos casos apresenta pelo menos uma ´area de interesse onde se pode garantir com um elevado grau de certeza que nela se encontra X [21, 22].
O segundo m´etodo de TDoA presente na literatura utiliza sinais de duas tecnologias diferentes para encontrar a relatividade nos seus tempos de chegada. Este explora a diferen¸ca dos tempos de voo de sinais cujas velocidades de propaga¸c˜ao s˜ao diferentes e logo ter˜ao tamb´em elas tempo de voo tamb´em diferentes. O sinal mais r´apido da mensagem enviada chega ao terminal m´ovel em t1 e este fica `a espera da mensagem com velocidade de propaga¸c˜ao mais
lenta que chegar´a no instante t2. ´E ent˜ao guardado o valor da diferen¸ca entre
os dois tempos t, expresso em segundos:
t = t2− t1(s) (2.10)
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 19
d = c × t(m) (2.11)
Onde:
– d ´e a distˆancia em metros;
– c ´e a velocidade de propaga¸c˜ao do sinal r´adio em metros por segundo; – t ´e a diferen¸ca de tempo de voo em segundos;
Consultando a Figura 2.1, pode observar-se este resultado. Este m´etodo ´e utilizado por um sistema de localiza¸c˜ao bastante popular denominado de Cricket [22]. A sua resolu¸c˜ao ´e seriamente dependente do meio e condi¸c˜oes em que ´e implementado.
Received Signal Strength Indicator - RSSI (Atenua¸c˜ao)
A metodologia de Received Signal Strength Indicator ´e diferente das apresentadas anteriormente na medida em que n˜ao s˜ao utilizados tempos de voo para a obten¸c˜ao dos valores das distˆancias mas sim valores de decaimento de potˆencia com a distˆancia. Para isso s˜ao utilizados modelos de propaga¸c˜ao das ondas electromagn´eticas de forma a conseguir traduzir os valores de potˆencia de sinal em distˆancias percorridas por estes. Um modelo de propaga¸c˜ao para ambientes indoor que usa a frequˆencia 2.4GHZ [21] ´e apresentado na equa¸c˜ao 2.12.
P L = P L1metro+ 10 log(Dn) + S (2.12)
Onde:
– P L ´e o valor total do Path Loss entre emissor e receptor em dB;
– P L1metro ´e o valor de referˆencia do Path Loss em dB entre emissor e
receptor quando a distˆancia entre estes ´e igual a 1 metro (distˆancia de referˆencia);
– n ´e o coeficiente de Path Loss dependendo do ambiente no qual se encontra inserido;
– S s˜ao os graus de Shadow Fading presentes no ambiente em dB
Conhecendo os valores da potˆencia de sa´ıda, os ganhos das antenas emissora e receptora e sabendo tamb´em o valor da atenua¸c˜ao do meio por unidade de distˆancia (Loss em dB/km ou dB/m) consegue portanto obter-se uma estimativa da distˆancia entre receptor e emissor e ap´os o conhecimento destas distˆancias obter o posicionamento do terminal m´ovel. Usando o m´etodo padr˜ao para o c´alculo da potˆencia do sinal recebido sabendo o valor da potˆencia na transmiss˜ao e as perdas totais temos em 2.13 que:
D = n
r
inv logRχP W R− T χP W R+ LT χ− GT χ+ P L1metro− S + LRχ − GRχ −10
(2.13) com:
– RχP W R - potˆencia recebida pelo receptor em dB;
– T χP W R - potˆencia transmitida pelo emissor em dB;
– LT χ - somat´orio de todas as perdas do lado do emissor em dB;
– LRχ - somat´orio de todas as perdas do lado do receptor em dB;
– GT χ - ganho da antena do emissor em dBi;
– GRχ - ganho da antena do receptor em dBi;
Esta t´ecnica ´e tipicamente utilizada posteriormente com latera¸c˜ao circular para a obten¸c˜ao da localiza¸c˜ao do terminal m´ovel. O m´etodo revela-se eficaz se as condi¸c˜oes do ambiente onde for inserido forem ´otimas porque pressup˜oe que exista linha de vista entre emissor e receptor. Caso contr´ario n˜ao ser´a poss´ıvel de calcular corretamente os valores das perdas totais devido a atenua¸c˜oes de paredes, reflex˜oes, refrac¸c˜oes e multipath interference. Quanto mais obst´aculos existirem entre emissor e receptor mais dif´ıcil ser´a para este m´etodo fornecer resultados aceit´aveis [20,21].
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 21
• Angula¸c˜ao
A Angula¸c˜ao ´e outra metodologia de c´alculo da posi¸c˜ao de um terminal m´ovel com a utiliza¸c˜ao de ˆangulos de incidˆencia. ´E um processo semelhante ao de latera¸c˜ao mas ao inv´es de utilizar distˆancias recorre a valores de ˆangulos para proceder `a localiza¸c˜ao [16, 21, 23].
O m´etodo normalmente utilizado tem o nome de Angle of Arrival ou ˆAngulo de Chegada (AoA), que consiste na obten¸c˜ao do ˆangulo de incidˆencia do sinal a quando da sua chegada a uma antena receptora situada numa das referˆencias. Quando se lida com a tentativa de localiza¸c˜ao num espa¸co a duas dimens˜oes, s˜ao necess´arias pelo menos duas referˆencias, e num espa¸co tridimensional pelo menos 3 no entanto, quanto maior for o n´umero de referˆencias a utilizar tipicamente os resultados da aproxima¸c˜ao s˜ao melhores.
Uma das formas de obter este m´etodo ´e com a utiliza¸c˜ao de antenas girat´orias que detectem qual ´e o ˆangulo onde potˆencia recebida atinge um m´aximo. No entanto este processo n˜ao ´e de todo simples. Pode observar-se pela Figura 2.3
um exemplo de como este processo ´e realizado.
Figura 2.3– Exemplo de Angula¸c˜ao [24].
Um grande inconveniente deste m´etodo ´e a multipath interference pois caso o emissor e o receptor n˜ao se encontrem em Line of Sight (LOS), a sua precis˜ao diminui significativamente em ´areas onde possam existir reflex˜oes/refrac¸c˜oes das ondas electromagn´eticas, tipicamente nos meios urbanos.
2.2.2
Proximidade
As metodologias de proximidade baseiam-se no princ´ıpio de encontrar a referˆencia mais pr´oxima do dispositivo/objecto a localizar. Pode ser encontrada a referˆencia mais pr´oxima `a qual o terminal m´ovel se encontra no momento ou ent˜ao a ´ultima referˆencia por onde este foi detectado. Neste tipo de sistemas a resolu¸c˜ao est´a associada ao n´umero de referˆencias dispon´ıvel sendo que quando mais referˆencias estiverem dispon´ıveis melhor ser´a a sua resolu¸c˜ao, mas com isto adv´em custos nos recursos a utilizar. O alcance deste tipo de metodologias ´e muitas vezes limitado sendo que o n´umero de referˆencias para um sistema de localiza¸c˜ao por proximidade, para que este seja razo´avel, deve ser bastante elevado. O m´etodo de proximidade pode ser divido em trˆes subcategorias que est˜ao relacionadas com as t´ecnicas para a obten¸c˜ao da posi¸c˜ao do terminal m´ovel [20, 23]:
• Contacto F´ısico
Este m´etodo consiste na detec¸c˜ao de um contacto entre o objecto que se pretende localizar e uma qualquer referˆencia. Se for poss´ıvel de detectar um contacto f´ısico entre um objecto ou pessoa que se pretenda localizar e a referˆencia, o problema da localiza¸c˜ao fica resolvido, visto que este se encontra junto ´a referˆencia e a posi¸c˜ao desta ´e conhecida no espa¸co. Pode verificar-se pela Figura 2.4 um exemplo de um destes sistemas sendo que este ´e o sensor de press˜ao Pressure Mat da QTCTM. Um outro exemplo de um sistema de
localiza¸c˜ao deste tipo ´e o Smart Floor [25].
Estas t´ecnicas s˜ao normalmente aplicadas a posi¸c˜oes num sistema de coordena-das bidimensional e apresenta como principal inconveniente o facto de ser poss´ıvel a identifica¸c˜ao do contacto de um objecto a uma das referˆencias, mas ser dif´ıcil a caracteriza¸c˜ao e identifica¸c˜ao do objecto em si. Tipicamente a marca de impress˜ao ou o peso do objecto s˜ao factores na identifica¸c˜ao mas por si s´o este sistema continua a ser espec´ıfico na resolu¸c˜ao de problemas de localiza¸c˜ao cuja identifica¸c˜ao do objecto em quest˜ao n˜ao seja cr´ıtica como por exemplo ligar automaticamente as luzes quando algu´em entra num compartimento
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 23
Figura 2.4 – QTCTM
Pressure Mat [26].
de uma casa.
• C´elula de Origem
Esta forma de localiza¸c˜ao por proximidade ´e baseada na monitoriza¸c˜ao de quando o terminal m´ovel est´a ao alcance de uma ou mais referˆencias de uma rede sem fios celular. Este conceito ´e chamado de c´elula r´adio-frequˆencia [21, 23] e resume-se ent˜ao, como se pode observar na Figura 2.5, `a obten¸c˜ao da c´elula onde se encontra o objecto a ser localizado.
Figura 2.5– Sistema de Localiza¸c˜ao por C´elula de Origem [21].
c´elula o terminal se encontra e caso esta seja bastante grande n˜ao atribui uma informa¸c˜ao muito precisa. Para melhorar resultados de localiza¸c˜ao esta t´ecnica deve ser usada em conjunto com outras t´ecnicas por exemplo as Time Based Techniques para uma maior precis˜ao. Pode ser tamb´em utilizada o seccionamento das antenas das esta¸c˜oes base da c´elula para permitir um aumento da resolu¸c˜ao [21].
Para uma obten¸c˜ao de melhores resultados, usa-se o valor de RSSI para a escolha da c´elula de origem, isto ´e, o dispositivo m´ovel tem tendˆencia para se ligar `a referˆencia cuja potˆencia seja a mais elevada, que tipicamente ´e aquela que se encontra mais pr´oxima. Este em conjunto com outros m´etodos de afina¸c˜ao de localiza¸c˜ao ´e usado pelas operadoras de servi¸cos m´oveis para determinarem a localiza¸c˜ao de um cliente na entrega de alguns servi¸cos, nomea-damente no servi¸co de chamada.
• Identifica¸c˜ao Autom´atica
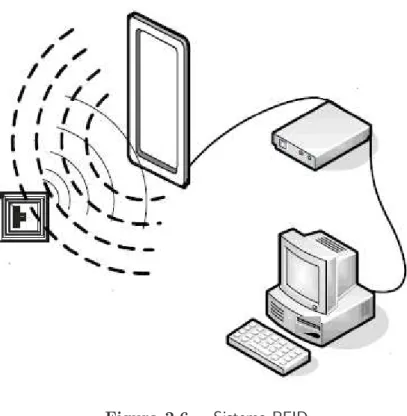
Esta ´ultima t´ecnica de localiza¸c˜ao por proximidade tem o nome de Identifica¸c˜ao Autom´atica. Esta designa¸c˜ao adv´em do facto de que usa sistemas de identifica¸c˜ao autom´aticos para resolver o problema da localiza¸c˜ao de um terminal m´ovel. Estes sistemas podem ser: caixas multibanco, via verde, tags RFID, entre outros. Um exemplo de como s˜ao utilizadas tags RFID pode ser visto na Figura2.6.
Tipicamente ´e efetuada a identifica¸c˜ao de um objecto ou terminal m´ovel e no instante em que ´e feita a identifica¸c˜ao tamb´em ´e encontrada a sua localiza¸c˜ao estimada devido ao baixo alcance deste tipo de sistemas. Este m´etodo ´e muito utilizado nos sistemas de tracking de encomendas atualmente.
2.2.3
An´
alise de Cena
Esta metodologia na literatura pode ser encontrada com dois nomes distintos, An´alise de Cena ou An´alise de Padr˜oes. Consiste essencialmente em analisar um conjunto de dados que sejam capazes de caracterizar uma posi¸c˜ao espacial. Para realizar
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 25
Figura 2.6 – Sistema RFID
este tipo de an´alise podem ser usadas duas t´ecnicas diferentes: uma a an´alise de cena est´atica onde s˜ao exploradas as caracter´ısticas obtidas no momento em que se requere localiza¸c˜ao sendo comparadas com um conjunto de dados predefinidos para o mapeamento de cada uma das posi¸c˜oes de referˆencia, e uma an´alise diferencial onde ´e feito um estudo acerca das diferen¸cas sucessivas entre cenas para obter informa¸c˜ao de posicionamento. A cena pode ser obtida atrav´es de duas t´ecnicas distintas sendo estas as t´ecnicas de fingerprinting, em que ´e feita uma an´alise da impress˜ao electromagn´etica da cena em quest˜ao, e por an´alise de imagens ou v´ıdeo com a utiliza¸c˜ao de sistemas de processamento de imagem.
• An´alise de Imagens
Esta t´ecnica consiste na obten¸c˜ao, an´alise e processamento de um conjunto de imagens ou v´ıdeos captados por cˆameras de v´ıdeo. Retirando o m´aximo de informa¸c˜ao poss´ıvel sobre o local ´e poss´ıvel obter o suficiente para conseguir localizar o objecto em quest˜ao como ´e o caso do trabalho que pode ser encontrado em [27]. Existem tamb´em duas outras formas muito usuais de processamento
usando realidade virtual. Os algoritmos usados nestas t´ecnicas s˜ao conhecidos como sendo do tipo marker [28] ou markless [27, 29, 30]. Nos algoritmos do tipo marker, define-se um conjunto de caracter´ısticas ou markers para o objecto que se pretende localizar, tipicamente um s´ımbolo, e realizando processamento digital de imagem sobre as imagens obtidas por v´ıdeo, este consegue localizar o objecto ou s´ımbolo em quest˜ao.
O grande inconveniente deste algoritmo ´e o facto de caso o s´ımbolo n˜ao esteja muito bem definido podem obter-se artefatos e falsos positivos. Caso se pretenda obter a localiza¸c˜ao de outro conjunto de objetos, o conjunto de caracter´ısticas tamb´em tem de ser alterado.
No caso dos algoritmos do tipo markless o objecto a localizar n˜ao apresenta qualquer tipo de simbolo ou marca, sendo apenas o software o ´unico respons´avel para realizar esta localiza¸c˜ao atrav´es da an´alise de padr˜oes respectivos na imagem. Podem ser encontrados exemplos destes algoritmos em [29, 30, 27] e na Figura 2.7. Estes m´etodos necessitam tipicamente de um elevado poder computacional.
Figura 2.7 – Algoritmo Markless para Localiza¸c˜ao de Pessoas [27].
• Fingerprinting
O m´etodo de an´alise de cena por fingerprinting [20,31,32,33,34,35,36,37] ´e uma metodologia de localiza¸c˜ao que consiste em ler em tempo real valores de um determinado parˆametro de um sinal eletromagn´etico que possa ser capaz de caracterizar uma posi¸c˜ao espacial, isto ´e, seja alterado com a posi¸c˜ao do
2.2. METODOLOGIAS DE LOCALIZAC¸ ˜AO 27
utilizador, e depois comparar estes valores com outros previamente guardados numa base de dados.
Na literatura esta base de dados ´e denominada de v´arias formas mas as mais comuns s˜ao Fingerprint Map (Mapa de Fingerprint) e Radio Map (Mapa R´adio). Tipicamente s˜ao utilizados os valores de RSSI mas podem ser usados outros parˆametros como a Signal to Noise Ratio (SNR). Na Figura 2.8 pode ver-se uma esquematiza¸c˜ao de um Fingerprint Map(FM).
O processo de an´alise por fingerprint est´a divido em duas fases distintas: Fase offline, ou fase de calibra¸c˜ao, ´e a primeira fase deste processo e consiste na elabora¸c˜ao do mapa de fingerprint. S˜ao portanto guardados, numa base de dados, valores quantitativos de uma determinada caracter´ıstica dos sinais eletromagn´eticos, e tamb´em informa¸c˜ao referente `a localiza¸c˜ao onde cada um desses valores foi adquirida.
Fase online, ´e a fase em que s˜ao obtidos um conjunto de valores de uma caracter´ıstica dos sinais eletromagn´eticos, capaz de caracterizar uma posi¸c˜ao espacial, em tempo real, e estes s˜ao comparados com aqueles que est˜ao guardados no FM. Para realizar esta compara¸c˜ao s˜ao utilizados algoritmos de estima¸c˜ao de localiza¸c˜ao (LEA - Location Estimation Algorithms) que aceitam como parˆametro de entrada os valores obtidos em tempo real e retornam um posi¸c˜ao espacial que dever´a ser muito pr´oxima da real.
Este m´etodo baseia-se em dois pressupostos [38]:
• A potˆencia do sinal diminui com o aumento da distˆancia `a referˆencia. • A potˆencia do sinal de um determinado ponto ´e constante ao longo do
tempo.
Um dos exemplos mais conhecidos e mais citados na literatura ´e o sistema de localiza¸c˜ao RADAR [32, 33], sistema que utiliza este m´etodo para a obten¸c˜ao da localiza¸c˜ao de um terminal m´ovel.
Figura 2.8 – Fingerprint Map [21].
2.3
Medidas de Performance das T´
ecnicas de Localiza¸c˜
ao
Existem bastantes t´ecnicas e metodologias para localiza¸c˜ao de um terminal m´ovel e, para que estas informa¸c˜oes sejam utilizadas com sucesso em LBS, ter˜ao que ser definidos crit´erios para a sua compara¸c˜ao. S˜ao ent˜ao, nesta subsec¸c˜ao definidos esses crit´erios de avalia¸c˜ao e que s˜ao utilizados para caracterizar as t´ecnicas e m´etodos de localiza¸c˜ao.
2.3.1
Accuracy (Precis˜
ao)
A precis˜ao de uma localiza¸c˜ao ´e a medida que define o qu˜ao perto as medidas de localiza¸c˜ao obtidas est˜ao da real posi¸c˜ao do dispositivo m´ovel que se pretende georreferenciar. Basicamente, quanto mais perto esta estiver do valor real, mais precisa ser´a esta medi¸c˜ao. A fun¸c˜ao mais comum de avalia¸c˜ao da precis˜ao de uma
2.3. MEDIDAS DE PERFORMANCE DAS T´ECNICAS DE LOCALIZAC¸ ˜AO 29
medida ´e a utiliza¸c˜ao de RMSE (Root Mean Square Error), mas pode ser tamb´em utilizada, e ´e tamb´em bastante comum, a CERP (Circular Error Probability). Nesta ´
ultima, ´e medida a probabilidade de m´ultiplas medi¸c˜oes de localiza¸c˜ao estarem contidas num c´ırculo ou esfera com um raio bem definido [17].
2.3.2
Reliability (Fiabilidade)
A fiabilidade ´e dif´ıcil de ser mensurada devido `a grande variedade de tecnologias a serem utilizadas. Nos sistemas GPS por exemplo a fiabilidade ´e definida como a medida de o qu˜ao consistente ´e o erro obtido e se este pode ser mantido abaixo de um determinado valor [17]. No que toca a m´etodos de posicionamento m´ovel, esta pode ser definida como a raz˜ao de posicionamento bem sucedidas em rela¸c˜ao a todas as tentativas feitas.
2.3.3
Latency (Latˆ
encia)
Latˆencia ´e definida como o tempo que demora deste o ”power-up” do dispositivo at´e ao instante em que ´e obtida a primeira medida de posi¸c˜ao [17]. Esta latˆencia precisa obviamente de ser baixa para que os servi¸cos possam funcionar de forma r´apida sem constrangimentos para o utilizador dos servi¸cos baseados em localiza¸c˜ao e para que aumente tamb´em a autonomia do dispositivo m´ovel a tentar obter a sua localiza¸c˜ao.
2.3.4
Availability (Disponibilidade)
Na literatura analisada ´e vista como uma medida de performance que depende demasiado da tecnologia usada. Por exemplo se o dispositivo m´ovel estiver equipado com um receptor GPS e esteja algures num t´unel, estes sinais n˜ao conseguindo penetrar paredes espessas ficam bloqueados. Isto significa que este tipo de tecnologia n˜ao tem disponibilidade quando inserido neste tipo de ambientes. Sendo assim, foi observado no estudo feito em [17], que a disponibilidade pode ser caracterizada de
acordo com o ambiente. As conclus˜oes obtidas podem ser observadas na tabela 2.1.
CLASSE EXEMPLOS
Remota Mar Aberto, Deserto e ´Areas sem Cobertura de Rede M´ovel
Rural Ambientes Rurais e Auto-estradas.
Suburbano Habita¸c˜oes residenciais, centros comerciais e folhagem densa.
Urbano Edif´ıcios altos e constru¸c˜oes.
Indoor Tectos de metal, madeira ou paredes de cimento.
Subterrˆaneo Constru¸c˜oes de cimento e garagens subterrˆaneas. Tabela 2.1– Disponibilidade dos M´etodos de Localiza¸c˜ao.
2.3.5
Applicability (Aplicabilidade)
De uma forma simples, a aplicabilidade mede as limita¸c˜oes f´ısicas e os requisitos associados com a implementa¸c˜ao e uso de tecnologias em termos t´ecnicos e financeiros [39]. As principais limita¸c˜oes e requisitos s˜ao o consumo de potˆencia, o tamanho do hardware, o tamanho do software, a carga de processamento, o suporte de modelos de posicionamento, dependˆencia de rede, custo e normaliza¸c˜ao [39].
2.4
Trabalhos Relacionados
Foram apresentadas as metodologias que s˜ao utilizadas para a elabora¸c˜ao e implemen-ta¸c˜ao de um sistema de localiza¸c˜ao na subsec¸c˜ao anterior. Nesta subsec¸c˜ao s˜ao apresentados alguns sistemas de localiza¸c˜ao encontrados na literatura que utilizam as metodologias apresentadas para encontrarem os terminais m´oveis. Para al´em de serem apresentados os sistemas de localiza¸c˜ao mais relevantes para a literatura s˜ao tamb´em apresentados alguns trabalhos que tenham de alguma forma contribu´ıdo para o melhoramento dos sistemas de localiza¸c˜ao. Os sistemas de localiza¸c˜ao apresen-tados ser˜ao o GPS, RADAR [32,33], SmartFloor [25], Cricket [22,40], Active Badge [41], Active Bat [42], PinPoint [43], Motetrack [34], Indoor Atlas [35] entre outros.
2.4. TRABALHOS RELACIONADOS 31
2.4.1
Global Position System - GPS
Muito provavelmente, o GPS [1] ´e o sistema de localiza¸c˜ao mais conhecido e mais bem sucedido de todos. Deu os seus primeiros passos a 1973 e permanece ainda hoje em desenvolvimento. Come¸cou por ser um sistema de localiza¸c˜ao para aplica¸c˜oes militares que foi depois adaptado `as necessidades da localiza¸c˜ao no sistema de emergˆencia Enhanced-911. Em 1993 foi adotado o seu uso para a popula¸c˜ao civil. O GPS ´e um sistema baseado em transmiss˜oes r´adio, `a escala global, com referencia¸c˜ao absoluta a 4D (latitude, longitude, altitude e velocidade), podendo ser utilizado a qualquer hora em qualquer local. A Constela¸c˜ao GPS ´e formada por 24 sat´elites a 20.200 km de altitude, distribu´ıdos em 6 planos de ´orbita com 4 sat´elites por ´orbita. Existem outros sat´elites, entre dois a cinco, que s˜ao utilizados como reserva ao sistema, criando assim redundˆancia `a Constela¸c˜ao. A cada 12 horas, os sat´elites completam uma ´orbita em torno da Terra o que faz com que a qualquer momento e em qualquer ponto da Terra sem obst´aculos, um esta¸c˜ao com capacidades receptivas possa receber os sinais de 7 sat´elites ao mesmo tempo [44].
Figura 2.9 – Constela¸c˜ao GPS [45]
O princ´ıpio fundamental da localiza¸c˜ao ´e baseado em distˆancias entre o utilizador e os sat´elites vis´ıveis que devem ser pelo menos 4. No entanto ´e apenas necess´ario o c´alculo de 3 medidas de distˆancia sendo que a quarta serve apenas para minimizar o
![Figura 2.1 – Latera¸c˜ ao Circular [21].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116684.1108621/39.892.166.644.265.642/figura-latera-c-ao-circular.webp)
![Figura 2.5 – Sistema de Localiza¸c˜ ao por C´elula de Origem [21].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116684.1108621/48.892.280.694.760.992/figura-sistema-localiza-ao-por-elula-origem.webp)
![Figura 2.8 – Fingerprint Map [21].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116684.1108621/53.892.196.606.171.603/figura-fingerprint-map.webp)
![Figura 2.10 – C´elula SmartFloor (Esquerda) - Sensor de Press˜ ao (Direita) [25].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116684.1108621/59.892.115.694.252.473/figura-c-elula-smartfloor-esquerda-sensor-press-direita.webp)
![Figura 2.13 – Exemplo de um N´o do Sistema PinPoint [43].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116684.1108621/63.892.119.693.236.612/figura-exemplo-de-um-n-do-sistema-pinpoint.webp)