Universidade de Aveiro 2008
Departamento de Matemática
Maria Elisa Fernandes
Classificação de Hipermapas Orientados Regulares
por Hyperfaces
Classification of Regular Oriented Hypermaps by
Hyperfaces
Universidade de Aveiro 2008
Departamento de Matemática
Maria Elisa Fernandes
Classificação de Hipermapas Orientados Regulares
por Hyperfaces
Classification of Regular Oriented Hypermaps by
Hyperfaces
Dissertação apresentada à Universidade de Aveiro para cumprimento dos requisitos necessários à obtenção do grau de Doutor em Matemática, realizada sob a orientação científica de António Breda d'Azevedo, Professor Associado do Departamento de Matemática da Universidade de Aveiro.
Dissertation submitted to the University of Aveiro in fulfilment of the requirements for the degree of Doctor of Philosophy in Mathematics, under the supervision of António Breda d'Azevedo, Associated Professor at the Department of Mathematics of the University of Aveiro.
o júri
presidente Doutor Carlos de Pascoal Neto
Professor Catedrático da Universidade de Aveiro
Doutor Domingos Moreira Cardoso
Professor Catedrático da Universidade de Aveiro
Doutor António João de Castilho Breda d’Azevedo
Professor Associado da Universidade de Aveiro (Orientador)
Doutora Maria Leonor Nogueira Coelho Moreira
Professora Auxiliar da Faculdade de Ciências da Universidade do Porto
Doutor Roman Nedela
Agradecimentos Ao Professor António João Breda D’Azevedo, meu orientador, pelo modo como acompanhou todo o trabalho, estabelecendo metas e indicando caminhos.
A todos os meus colegas e amigos do Departamento de Matemática da Universidade de Aveiro pelo companheirismo e amizade. Gostaria particularmente de agradecer ao Rui Duarte que leu a tese com a maior das atenções e deu importantes correcções e sugestões e ao Paolo Vettori que me ajudou nos acetatos da apresentação.
À minha amiga Diane Vaz que me ajudou no Inglês e aos amigos de sempre.
À minha família, em especial aos meus pais, que souberam compreender a minha falta de disponibilidade, apoiando-me a todos os níveis.
Palavras-chave Teoria de hipermapas, Teoria de grupos.
Resumo Esta dissertação apresenta uma classificação de todos os hipermapas orientados regulares, com um número primo de hiperfaces e completa a classificação de todos os hipermapas orientados regulares até 7 hiperfaces. Um hipermapa orientado regular é um terno ordenado composto por um grupo finito, designado grupo de monodromia, e dois geradores. O número de hiperfaces é o número de órbitas do grupo cíclico gerado pelo primeiro dos geradores considerados. Apesar desta caracterização, esta classificação não é meramente algébrica, de facto, um hipermapa regular orientado corresponde a um mergulho celular de um hipergrafo conexo numa superfície compacta.
Um hipermapa orientado regular é reflexivo se admite uma reflexão, isto é, um automorfismo do hipergrafo subjacente invertendo a orientação global da superfície, caso contrário o hipermapa diz-se quiral. Algebricamente um hipermapa regular orientado é reflexivo se a correspondência entre os geradores considerados e os respectivos inversos define um isomorfismo do grupo de monodromia. Nesta classificação para além dos grupos de monodromia são calculados os grupos e índices de quiralidade dos hipermapas regulares orientados até seis hiperfaces.
A classificação dos hipermapas orientados regulares com uma e duas hiperfaces, obtém-se da classificação dos hipermapas orientavelmente regulares incluída em [3]. Os hipermapas quirais até 4 hiperfaces foram classificados por Breda d'Azevedo e Nedela em [9]. Nesta dissertação é estendido o trabalho desenvolvido em [9] aos hipermapas reflexivos com 3 e 4 hiperfaces e a todos os hipermapas orientados regulares com 5, 6 e 7 hiperfaces. Este foi o ponto de partida para a generalização da classificação a todos os hipermapas regulares com um número primo de hiperfaces.
keywords Hypermap theory, Group theory.
Abstract This dissertation gives a classification of all regular oriented hypermaps, with a prime number of hyperfaces and completes the classification of all regular oriented hypermaps up to 7 hyperfaces. A regular oriented hypermap is an ordered triple composed with a finite group, called monodromy group, and two generators. The number of hyperfaces is the number of orbits of the cyclic group generated by the first of the prescribed generators. Despite this characterization, this classification is not merely algebraic. In fact a hypermap corresponds to an embedding of a connected hypergraph into an orientable compact surface.
A regular oriented hypermap is reflexible if admits a reflection, that is, an automorphism of the underlying hypergraph reversing the global orientation of the surface, otherwise it is chiral. Algebraically, a regular oriented hypermap is reflexible if the correspondence between the prescribed generators and its inverses defines an isomorphism of the monodromy group. In this classification it is given not only the monodromy groups but also the chirality groups and the chirality indexes.
The classification of regular oriented hypermaps with one and two hyperfaces is obtained from the classification of orientable regular hypermaps with 1 and 2 hyperfaces included in [3]. The chiral hypermaps with 3 and 4 hyperfaces were classified by Breda d'Azevedo and Nedela in [9]. In this dissertation the work done in [9] is extended to the reflexible hypermaps with 3 and 4 hyperfaces and to all regular oriented hypermaps with 5, 6 and 7 hyperfaces. This was the beginning point for the generalization of the classification to all regular oriented hypermaps with a prime number of hyperfaces.
Contents
Symbols iii
1 Introduction 1
1.1 Overview . . . 1
1.2 Contributions . . . 4
1.3 Organization of the dissertation . . . 5
2 Background 7 2.1 Introduction . . . 7
2.2 Regular oriented hypermap . . . 8
2.3 Coverings and automorphisms . . . 9
2.4 Chirality group and chirality index . . . 11
2.5 Toroidal maps and hypermaps . . . 12
2.6 Regular oriented hypermaps from metacyclic groups . . . 13
2.7 Regular orientable hypermaps with 1 and 2 hyperfaces . . . 14
2.8 The chiral hypermaps up to 4 hyperfaces . . . 14
3 Preamble to the classification 17 3.1 Introduction . . . 17
3.2 Permutational hypermap of a regular oriented hypermap . . . 17
4 Reflexible hypermaps with 3 and 4 hyperfaces 23 4.1 Introduction . . . 23
4.2 Reflexible hypermaps with 3 hyperfaces . . . 23
4.3 Reflexible hypermaps with 4 hyperfaces . . . 27 i
5 Regular oriented hypermaps with 5 hyperfaces 37
5.1 Introduction . . . 37
5.2 Permutational hypermaps . . . 37
5.3 Reflexible hypermaps with 5 hyperfaces . . . 39
5.4 Chiral hypermaps with 5 hyperfaces . . . 42
6 Refinement of the method of classification 51 6.1 Introduction . . . 51
6.2 The special covering H → P− . . . 52
6.3 Derived hypermaps . . . 53
7 Regular oriented hypermaps with 6 hyperfaces 57 7.1 Introduction . . . 57
7.2 Permutational hypermaps . . . 57
7.3 Reflexible and chiral hypermaps with 6 hyperfaces . . . 59
7.4 Chirality groups, chirality indexes and H-sequences . . . 71
8 Regular oriented hypermaps with 7 hyperfaces 73 8.1 Introduction . . . 73
8.2 Permutational hypermaps . . . 73
8.3 Reflexible hypermaps with 7 hyperfaces . . . 75
8.4 Chiral hypermaps with 7 hyperfaces . . . 77
9 Regular oriented hypermaps with a prime number of hyperfaces 85 9.1 Introduction . . . 85
9.2 Permutational hypermaps . . . 85
9.3 Classification Theorem . . . 88
9.4 Chirality groups and chirality indexes . . . 91
A GAP’s permutational hypermaps list 93
Bibliography 99
Index 103
Symbols
Basic notation:
hXi the subgroup generated by X;
R normal closure of R;
hRiG normal closure of R in G;
hX | Ri group presentation;
G/rK set of right cosets;
G/lK set of left cosets;
G/K factor group;
|G| order of G;
|x| order of an element x;
→ mapping;
7→ effect of mapping on an element;
∼ = isomorphic; Sn symmetric group; SΩ group of permutations on Ω; Cn cyclic group; iii
An alternating group;
Dn dihedral group;
× direct product;
o semidirect product;
/ is a normal subgroup of;
Z(G) centre of group G;
ab conjugate b−1ab;
[a, b] commutator a−1b−1ab;
® commutes;
F (a, b) free group on the set {a, b};
1 empty word; identity element;
b
x representative element of the equivalence class;
lcm(a, b) least common multiple;
(a, b) greatest common divisor;
a = b mod n a − b is multiple of n; a|b b is multiple of a; := equal by definition; ¥ end of proof; ♦ end of case. iv
Other symbols and pages where they are introduced: r0, r1 and r2 1 ε = (θ; r0, r1, r2) 1 (l, m, n) 3 V, E and F 4 H = (G; a, b) 8 P = (P ; A, B) 18 Gn,F,u,t 13 Gn,F,u,t 13 {n, l}α,β 12 (3, 3, 3)α,β 12 M on(H) 8 Aut(H) 10 X (H) 4 g(H) 4 X(H) 11 H− 11 DδH 9 M (H) 53 Rk(H) 53 Lk(H) 53 K 17 r, s 19 v
Chapter 1
Introduction
1.1
Overview
A topological hypermap is a cellular embedding of a connected hypergraph into a compact and connected surface without border. This hypergraph may be represented by a bipartite graph with two monochromatic sets of vertices, the white and the black vertices, representing respectively the hypervertices and the hyperedges of the hypermap. The hyperfaces are the faces of the bipartite graph. The genus of an hypermap is the genus of the underlying surface and an hypermap is orientable, if the underlying surface is orientable.
A covering between two hypermaps is a mapping between the respective underlying hyper-graphs assigning hypervertices to hypervertices, hyperedges to hyperedges and hyperfaces to hyperfaces. A covering from a hypermap to itself is called an automorphism. Hypermap au-tomorphisms split naturally into two classes, orientation-preserving and orientation-reversing automorphisms. An automorphism reversing the global orientation of the surface is called a
mirror symmetry or a reflection.
In map theory it is often convenient to replace the topological objects by their combinatorial counterparts. In fact an hypermap can be described by a sequence ε = (θ; r0, r1, r2) where
θ is a set of flags and r0, r1 and r2 are involutions in Sθ. The group generated by this
involutions, called the monodromy group of ε and denoted by M on(ε), is transitive on θ. The 1
2 Chapter 1. Introduction
flags correspond to triangles of the barycentric subdivision of the underlying hypergraph, that is obtained by joining each hyperface-center to each hypervertex and hyperedge (this is an extension of the notion of a barycentric subdivision of a graph). For each flag f , its three neighbors are f r0, f r1 and f r2.
fr f
2 fr1
fr0
Fig. 1.1. Neighbors of a flag.
For an orientable hypermap, the action of the group G generated by r0r1and r1r2on θ, divides
θ in two sets. In this case, the flags can be represented by white and black triangles, such
that, adjacent flags around each hyperface, have different colors.
Fig. 1.2. White and black flags.
An oriented hypermap is a triple H = (D; a, b), where D is a set of darts, and a, b are two permutations of D generating a transitive group G called the monodromy group of H, usually denoted by M on(H). An oriented hypermap arises from an orientable hypermap (θ; r0, r1, r2)
with D being one set of monochromatic flags, a = r0r1 and b = r1r2. With this, considering
the black darts as in Fig. 1.2., a acts on the darts as a local counter-clockwise rotation about a hyperface, b acts as a local counter-clockwise rotation of the darts about a hypervertex, and therefor ab acts on the darts as a clockwise rotation about a hyperedge.
1.1 Overview 3 a 2 ab f f. f. ab f. f.(ab) 2
Fig. 1.3. Action of a and b on a flag f .
The oriented hypermap H is regular if the action of G on the set of darts D is regular. In general,
|M on(H)| ≥ |D|,
and the equality occurs if and only if H is regular.
If H = (D; a, b) and H0 = (D0; a0, b0) are two oriented hypermaps, a covering from H to H0 is a
function φ : D → D0 such that for all w ∈ D, waφ = wφa0 and wbφ = wφb0. Two hypermaps
H and H0 are isomorphic, if there is a bijective covering between H and H0, and we write
H ∼= H0.
An automorphism ψ of an oriented hypermap H = (D; a, b) is a permutation of the darts that comutes with a and b, that is, ψa = aψ and ψb = bψ. Equivalently, an automorphism is a covering from H to itself. The group of automorphisms of a regular oriented hypermap, denoted by Aut(H), acts semi-regularly on D so
|Aut(H)| ≤ |D|.
When H is regular, one has |Aut(H)| = |D|.
A permutation ψ of D is a mirror symmetry of an oriented hypermap H = (D; a, b) if ψa =
a−1ψ and ψb = b−1ψ. An oriented hypermap is called mirror asymmetric or chiral if a mirror
symmetry is an automorphism of H, otherwise the hypermap is reflexible.
An oriented hypermap is uniform if the actions of hai, hbi and habi on D are uniform. The
type of an uniform oriented hypermap is a triple (l, m, n), with l being the order of b, the
4 Chapter 1. Introduction
that is the valency of a hyperface. The H-sequence of H is [l, m, n; V, E, F ; |G|],
where V , E and F are the number of hypervertices, hyperedges and hyperfaces, respectively. The Euler characteristic, X (H), of the underlying surface is calculated according to the for-mula, X (H) = V + E + F − |G|, or equivalently, X (H) =¡1l +m1 +1n− 1¢|G|. The genus of
an oriented hypermap is g(H) =2−X (H)2 .
1.2
Contributions
A common central problem in map and hypermap theory is the classification of regular oriented hypermaps either by size (order of G), number of hyperfaces, underlying graph, automorphism group, or genus.
In [3], Breda d’Azevedo classified the orientable regular hypermaps with 1 and 2 hyperfaces. Breda d’Azevedo and Nedela, in [9], gave a classification of chiral hypermaps up to 4 hyper-faces. In [24], Wilson and Breda d’Azevedo classified the non-orientable reflexible maps with a prime number of faces, as well as the non-orientable reflexible hypermaps with 1, 2, 3 and 5 hyperfaces. With 4 hyperfaces only a partial result has been established by the same authors. Regular oriented hypermaps on the sphere are easily deduced from the Euler formula, viz. the five Platonic solids, two infinite families of types (1, n, n) and (2, 2, n), plus their duals. The regular oriented maps on the torus were classified by Coxeter and Moser [12] and their chirality group and the chirality index were computed in [1]. A classification of toroidal oriented hypermaps was done by Corn and Singerman [11]. As a consequence of the well known Hurwitz bound, for genus g > 1 the number of regular oriented hypermaps is finite and
bounded by 84(g − 1). In [8], Breda d’Azevedo and Nedela, classified the chiral hypermaps
of genus at most four. Recently Conder, with computational support, classified all orientable regular maps on surfaces of genus 2 to 101 and all non-orientable regular maps on surfaces of genus 2 to 202.
In map theory classifying by size, is the same as classifying by the number of edges since the size of a regular oriented map with E edges is 2E. This has been done extensively by
1.3 Organization of the dissertation 5 Wilson [23] with an almost complete classification of the regular oriented maps up to 100 edges, now collected and better completed in [22]. More recently, Orbanić gave a classification of reflexible maps up to 100 edges which are not parallel-product decomposable [19]. We can find a classification of reflexible hypermaps of size 2p (p prime) in [2] and a classification of non-orientable reflexible hypermaps of size a power of 2 in [24].
In [13] we can find a classification of all regular embeddings of the complete multipartite graphs
Kp,...,p for a prime p into orientable surfaces. Recently some contributions on the classification
of orientable embeddings of the complete bipartite graph Kn,nwere accomplished [18, 17]. We
can also find some recent investigation on regular embeddings of n-dimensional cubes Qn[14].
A classification of all reflexible hypermaps with abelian automorphism group was done by Breda d’Azevedo and G. Jones in [6], and in [7] they classify the regular hypermaps with automorphism group A5.
1.3
Organization of the dissertation
In this dissertation we give a classification of all regular oriented hypermaps with a prime num-ber of hyperfaces and of all regular oriented hypermaps with 4 and 6 hyperfaces, completing the classification up to 7 hyperfaces.
This thesis is organized into nine chapters and one appendix. The Index, Symbols and Biblio-graphy refer the reader to terminology, notation and sources thereof.
In the following Chapter we present the contents that we found necessary for the under-standing of this work. As toroidal maps and hypermaps will appear with relevance inside the classification, we also dedicate a section to them. The anterior classifications of oriented hypermaps by number of hyperfaces will be also exhibited. Namely, the classification of orien-table hypermaps with 1 and 2 hyperfaces [3] and the classification of chiral hypermaps up to 4 hyperfaces [9].
The third Chapter gives a description of the method used in the classification, improving the method used in [9]. Any oriented hypermap is a covering of a hypermap with monodromy
6 Chapter 1. Introduction
group generated by two permutations in the set of hyperfaces, called permutational hypermap. In this chapter we describe a method for listing all possible permutational hypermaps for a fixed number of hyperfaces and we establish some coordinates to obtain the complete generalized family of hypermaps corresponding to a given permutational hypermap.
In Chapter 4 we give the classification of the reflexible oriented hypermaps up to 4 hyperfaces, completing the classification of Breda d’Azevedo and Nedela. In chapters 5, 7 and 8, we classify the regular oriented hypermaps with 5, 6 and 7 hyperfaces, respectively. For those hypermaps we compute the chirality groups, chirality indexes and H-sequences.
In the middle we give a refinement of the method described in Chapter 3. In fact, in Chapter 6, we present a simplification to the classification, that will be used only in the forward chap-ters. Focusing on the special covering from a hypermap to its permutational hypermap, we describe a process to obtain all hypermaps with a given permutational hypermap. Then we show that the number of cases to be studied, corresponding to list of permutational hyper-maps, can be reduced regardless the derived permutational hypermaps. Indeed, the hypermaps corresponding to the non-considered cases, can be obtained from the others.
Finally, in Chapter 9, we classify all regular oriented hypermaps with a prime number of hyperfaces. The group of permutations of a regular oriented hypermap with a prime number of hyperfaces has the particularity of being primitive and a semi-direct product of cyclic groups. The rest is just a generalization and simplification of the calculations that were laid down for 5 and 7 hyperfaces.
We include, in Appendix A, the description of a computer program that calculates a list of all permutational hypermaps for a fixed number of hyperfaces.
Chapter 2
Background
2.1
Introduction
In this chapter we focus only on the regular oriented hypermaps and, more precisely, on subjects that will be essencial to the classification. Firstly, we specify for oriented hypermaps some notions that were included in Chapter 1. We start by giving a reformulation of the notion of a regular oriented hypermap and with this basis we rewrite the notions of covering, automorphism and chirality.
The toroidal hypermaps will be also privileged inside the dissertation, therefore we include here the classification of toroidal maps and the classification of all (3, 3, 3) regular oriented hypermaps [11, 12]. Additionally, we recall their chirality groups and chirality indexes [1, 5]. The simplest examples of regular oriented hypermaps emerge naturally from the canonical presentation of metacyclic groups. In this chapter we give the chirality group and the chirality index of these hypermaps, computed by Breda d’Azevedo and Nedela in [9].
Finally, we collect the classification of the orientable regular hypermaps with 1 and 2 hyperfaces and of all chiral hypermaps up to 4 hyperfaces [3, 9].
8 Chapter 2. Background
2.2
Regular oriented hypermap
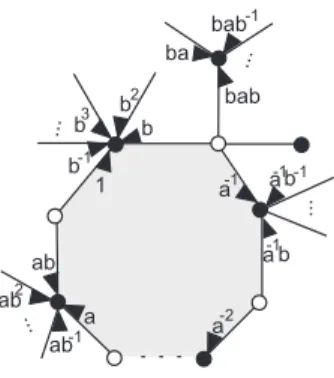
We started by given a topological notion of a regular oriented hypermap, but as we mention in Chapter 1, a regular oriented hypermap H is combinatorially described by a triple (D; a, b), where G = ha, bi acts regularly on D by right multiplication. Recall that we consider a acting as a local one-step counter-clockwise rotation on the darts about each hyperface, b acting as a local one-step counter-clockwise rotation on the darts about each hypervertex, and ab as a local one-step clockwise rotation on the darts about each hyperedge. Using the regular action of G on the darts, each dart corresponds to an element of the monodromy group, D ≡ G.
b 1 a -1 a a-2 b2 b b 3 -1 -1 a b-1 -1 a b ... ... ab ab2 ... ab-1 ba bab bab -1 ...
Fig. 2.2. Regular oriented hypermap.
The notion of a regular oriented hypermap can be reformulated as follows:
Definition 2.1 A regular oriented hypermap is a triple H = (G; a, b) where G is a group
and (a, b) is an ordered pair of generators of G. The group G is called the monodromy
group of H and is denoted by M on(H).
An alternative way to describe a hypermap is via a cellular embedding of a connected 3-valent graph into a compact surface such that the cells are 3-colored, with adjacent cells having different colors. Numbering the cell-colors 0, 1 and 2, the 0-cells correspond to the hyperver-tices, the 1-cells to the hyperedges and the 2-cells to the hyperfaces. A permutation δ ∈ S{0,1,2} of the colors corresponds to the δ-dual of the hypermap. For instance, the (0,1)-dual of a hypermap is obtained switching hypervertices with hyperedges.
2.3 Coverings and automorphisms 9 Definition 2.2 For each δ ∈ S{0,1,2}, the δ-dual of a regular oriented hypermap H = (G; a, b) is the regular oriented hypermap DδH, defined as follows:
D(0,1)H = (G; a, (ab)−1), D
(0,2)H = (G; b, a), D(1,2)H = (G; (ab)−1, b),
D(0,1,2)H = (G; b, (ab)−1), D
(0,2,1)H = (G; (ab)−1, a).
2.3
Coverings and automorphisms
Let H = (G; a, b) and H0 = (G0; a0, b0) be two regular oriented hypermaps.
Definition 2.3 A covering from H to H0 is a mapping φ : G → G0, between the monodromy
groups of H and H0, such that for all w ∈ G,
waφ = wφa0and wbφ = wφb0.
If there is a covering from H to H0, we say that H covers H0 or that H is a covering of H0.
Proposition 2.4 H is a covering of H0 if and only if there exists an epimorphism sending a
to a0 and b to b0.
Proof. Let φ be a covering from H to H0 such that 1φ := ε. For each word w(a, b) in F (a, b),
one has w(a, b)φ = εw(a0, b0). Thus the function ψ : G → G0, g 7→ ε−1.(gφ) is an epimorphism G → G0:
1ψ = ε−1.(1φ) = 1, aψ = ε−1.(aφ) = a0, bψ = ε−1.(bφ) = b0 and w(a0, b0) = w(a, b)ψ. Conversely, any epimorphism from G to G0 sending a → a0 and b → b0 is a covering from H
to H0.
It follows from Proposition 2.4, that every covering is surjective, hence a covering is bijective if and only if it is injective.
Definition 2.5 An injective covering is called an isomorphism. If there is an isomorphism
10 Chapter 2. Background
Corollary 2.6 The hypermaps H and H0 are isomorphic, H ∼= H0, if and only if the
assign-ment a 7→ a0, b 7→ b0 can be extended to an isomorphism G → G0.
Remark that, if H is a covering of H0, then the number of hypervertices, hyperedges and
hyperfaces of H0 divides the number of hypervertices, hyperedges and hyperfaces of H.
Definition 2.7 An automorphism of H is a bijective covering H → H, i.e. a function
commuting with a and b. The group of automorphisms of an oriented hypermap is denoted by Aut(H).
Each element γ ∈ G induces an automorphism ϕγ of H by assigning to each dart g ∈ G the
dart γg. The regularity of H implies that each automorphism of H is an automorphism ϕγ
for some γ ∈ G,
Aut(H) = {ϕγ|γ ∈ G}.
In general, the correspondence a 7→ ϕa, b 7→ ϕb does not define an isomorphism between the monodromy group and the automorphism group, in fact for each dart w ∈ G, one has,
wϕaϕb= (aw)ϕb = baw = ϕba.
Instead, consider the assignment a 7→ ϕa−1, b 7→ ϕb−1, with this, one get an isomorphism
G → Aut(H) and consequently:
Proposition 2.8 The regular oriented hypermap H = (G; a, b) and (Aut(H); ϕa−1, ϕb−1),
where 1ϕa= a and 1ϕb = b, are isomorphic.
Remark 2.9 In this dissertation we consider only the right action of the monodromy group
on itself. In (Aut(H); ϕa−1, ϕb−1) the elements of the monodromy group are automorphisms
acting on the darts by right multiplication. Clearly, the action of Aut(H) on the darts, actually corresponds to the action of monodromy group on the darts by left multiplication.
2.4 Chirality group and chirality index 11
2.4
Chirality group and chirality index
Consider a regular oriented hypermap H = (G; a, b) and let ha, b | R(a, b)i, where R(a, b) denotes a set of relators, be a presentation of G.
Definition 2.10 The mirror image or the chiral pair of H is H−:= (G; a−1, b−1). Definition 2.11 A regular oriented hypermap H is reflexible if it is isomorphic to H− (the
correspondence a 7→ a−1, b 7→ b−1 can be extended to an automorphism of G), otherwise H is
chiral.
Definition 2.12 The chirality group of H is the normal closure hR(a−1, b−1)iG and is
denoted by X(H). The order of the chirality group is the chirality index of H.
The chirality group is a qualitative measure of how far an oriented hypermap deviates from being reflexible, while its size (the chirality index) is a quantitative measure. Particularly, the chirality group of a reflexible hypermap is trivial.
Proposition 2.13 The chirality group of H is isomorphic to the chirality group of its chiral
pair H−.
Proposition 2.14 A regular oriented hypermap H and its δ-dual, DδH, have the same
chi-rality group.
Proof. Consider the hypermap D(0,1)H. Let α := a and β := (ab)−1. By changing
generators, G = hα, β | R(α, (βα)−1i we have,
X(D(0,1)H) = hR(α−1, αβ)iG= hR(a−1, ab−1a−1)iG
= h(R(a−1, ab−1a−1))aiG= hR(a−1, b−1)iG = X(H).
12 Chapter 2. Background
2.5
Toroidal maps and hypermaps
There are only tree families of toroidal maps: {4, 4}α,β, {6, 3}α,β and {3, 6}α,β with α and β
non-negative integers (see [12, 11]). 1
Proposition 2.15 The regular oriented maps on torus are
{4, 4}α,β = (G4,4α,β; a, b), {3, 6}α,β= (G3,6α,β; a, b) or {6, 3}α,β = (G3,6α,β; b, a)
with
G4,4α,β= ha, b | a4 = (ab)2 = b4 = (ab−1)α(a−1b)β = 1i
and
G3,6α,β = ha, b | a3= (ab)2 = b6 = (ba2b)α(a2b2)β = 1i,
for some non-negative α and β.
Besides the Coxeter and Moser toroidal maps, the only regular oriented hypermaps on the torus are the hypermaps of type (3, 3, 3) whose walsh maps are {6, 3}α,β.
Proposition 2.16 A (3, 3, 3) oriented hypermap is, up to a (0,1)-duality, isomorphic to (3, 3, 3)α,β = (Gα,β; a, b) for some non-negative integer α and β, with
Gα,β = ha, b | a3 = (ab)3 = b3 = (b−1a)α(ba−1)β = 1i.
The chirality group of the toroidal maps was computed in [1]. In addition, in [5], a conjoined work with Breda d’Azevedo and Ilda Rodrigues, we have proved that (3, 3, 3)α,β and {6, 3}α,β have the same chirality group.
Proposition 2.17 The chirality group of {4, 4}α,β is a cyclic group generated by (ab−1)2δ,
where δ = (α, β), and the chirality index is κ = (ω,2δω2).
Proposition 2.18 The chirality group of {3, 6}α,β, {6, 3}α,β and (3, 3, 3)α,β is a cyclic group generated by (ab−2)α−β. The chirality index is given by κ = ω
(ω,(α−β)δ) where δ = (α, β).
1In {n, l}
2.6 Regular oriented hypermaps from metacyclic groups 13
2.6
Regular oriented hypermaps from metacyclic groups
Definition 2.19 A group G is metacyclic if it has a normal subgroup H such that both H
and G/H are cyclic.
A general presentation of a metacyclic group is given by the following theorem whose proof can be found in [16].
Proposition 2.20 Consider the group
Gn,m,u,t = hx, y | xn= 1, ym= xu, yxy−1= xti
with n, m, u and t satisfying (t − 1)u = 0 mod n and tm = 1 mod n. Then K = hxi is a
normal subgroup of G := Gn,m,u,t such that K = Cn and G/K = Cm. Thus G is a metacyclic
group of order nm, and moreover, every finite metacyclic group has a presentation of this form.
Definition 2.21 A regular oriented hypermap Gn,F,u,t= (Gn,F,u,t; a, b) with
Gn,F,u,t:= ha, b | an= 1, bF = au, bab−1 = ati
for some u and t such that (t − 1)u = 0 mod n and tF = 1 mod n, is called a canonical
metacyclic . Each hypermap of the family Gn,F,u,t, has F hyperfaces of valency n.
.
Note that distinct values for u and t give rise to non-isomorphic hypermaps.
The following theorem gives necessary and sufficient conditions for a canonical metacyclic hypermap to be chiral. Additionally, gives the chirality group and the chirality index of these hypermaps [9].
Theorem 2.22 1. Gn,F,u,t is chiral if and only if t26= 1 mod n;
2. If t2 6= 1 mod n, then the hypermap G
n,F,u,t is chiral, and has chirality group X(H) =
14 Chapter 2. Background
2.7
Regular orientable hypermaps with 1 and 2 hyperfaces
The regular orientable and non-orientable hypermaps with 1 and 2 hyperfaces, with and without a border, where classified by Breda d’Azevedo in [3]. We can pick out from [3] the following results:
Proposition 2.23 A regular orientable hypermap (without border) with 1 hyperface of valency
n is isomorphic to ε1fk (n) for some k ∈ {0, ..., n − 1}, with
M on(ε1fk (n)) = hr0, r1, r2 | r02= r21 = r22 = (r0r1)n= r2(r0r1)kr0 = 1i.
Proposition 2.24 A regular orientable hypermap with 2 hyperfaces of valency n is isomorphic
to B+ˆ2 or to ε2f
n (k0, k1) for some k0 ∈ {0, ..., n − 2} and k1 ∈ {0, ..., n − 1} such that,
k0(1 − ∆) = 0 mod n and ∆2 = 1 mod n, with ∆ = k1− k0, and
M on(B+ˆ2) = hr0, r1, r2 | r02 = r12= r22 = r0r1−1= 1i,
M on(ε2fn (k0, k1)) = hr0, r1, r2 | r02= r12= r22 = an= rr2
0 ak0r0 = rr12ak1r0 = 1i
where a = r0r1.
Consequently, a regular oriented hypermap with 1 hyperface of valency n has a cyclic mo-nodromy group Cn, and a regular oriented hypermap with 2 hyperfaces of valency n > 1 is
canonical metacyclic.
2.8
The chiral hypermaps up to 4 hyperfaces
The chiral hypermaps with at most four hyperfaces were classified by Breda d’Azevedo and Nedela in [9]. They have observed that there are no chiral hypermaps with less then three hy-perfaces and that the chiral hypermaps with tree and four hyhy-perfaces are canonical metacyclic.
Proposition 2.25 If H is a regular oriented hypermap with 1 or 2 hyperfaces then H is
2.8 The chiral hypermaps up to 4 hyperfaces 15 Proposition 2.26 If H is chiral with 3 hyperfaces of valency n, then n ≥ 7 and the
mono-dromy group is metacyclic
Gn,3,u,t= ha, b | an= 1, b3 = au, bab−1= at, i
for some u ∈ {0, ..., n − 1} and t ∈ {2, ..., n − 1} satisfying (u − 1)t = 0 mod n and t3 =
1 mod n. Vice-versa, (Gn,3,u,t; a, b) is a chiral hypermap with 3 hyperfaces of valency n.
Moreover, different solutions (n, u, t) correspond to non-isomorphic hypermaps.
Proposition 2.27 If H is chiral with 4 hyperfaces of valency n, then n ≥ 5 and the
mono-dromy group is metacyclic
Gn,4,u,t= ha, b | an= 1, b4 = au, bab−1= at, i
for some u ∈ {0, ..., n − 1} and t ∈ {2, ..., n − 1} satisfying (u − 1)t = 0 mod n, t4 = 1
mod n and t4 6= 1 mod n. Vice-versa, (G
n,4,u,t; a, b) is a chiral hypermap with 4 hyperfaces
Chapter 3
Preamble to the classification
3.1
Introduction
The method used in this classification lies on the fact that the group of automorphisms acts regularly on the set of hyperfaces, and that this action can be described by a group of permu-tations. This group is the monodromy group of what we call permutational hypermap. From the correspondence between the automorphisms and the permutations we get an epimorphism, in such a way that every hypermap is a covering of the mirror image of its permutational hy-permap. The classification of all permutational hypermaps is, of course, a problem much more well-to-do. Here we improve the method used in [9] to list all the permutational hypermaps for a given number of hyperfaces.
3.2
Permutational hypermap of a regular oriented hypermap
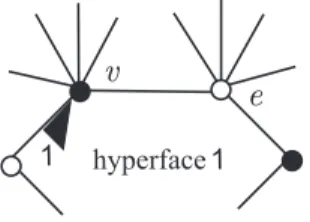
Let H = (G; a, b) be a regular oriented hypermap with F hyperfaces of valency n and let K be the subgroup of G generated by a. Suppose that H has at least 3 hyperfaces.
Using the regular action of G on the darts, we can label all darts using the elements of the monodromy group, as we have explained in Section 2.2. Let the “hyperface 1” be the hyperface having the darts labeled with the elements of K, let v be the hypervertex adjacent to the “dart
18 Chapter 3. Preamble to the classification
1” and e the hyperedge adjacent to v and to the “dart b”, as pictured below:
1 hyperface1 v
e
Fig. 3.2. “hyperface 1”, “dart 1”, v and e.
The automorphisms ϕa: g 7→ ag and ϕb: g 7→ bg, defined in Section 2.3, are one step
counter-clockwise rotations of the darts about the “hyperface 1” and the hypervertex v, respectively. The set of hyperfaces of H forms a partition of G, so that, each left coset gK ∈ G/lK can be
identified with an element of Ω := {1, . . . , F }. In that correspondence K is the “hyperface 1”.
Definition 3.1 The action of the group of automorphisms of H on G naturally induces a
transitive action on the set of the hyperfaces that can be described by permutations in G/lK
A : gK 7→ agK and B : gK 7→ bgK.
that are actually permutations in SF. The subgroup P of SF generated by A and B is the
group of permutations of H. The hypermap P = (P ; A, B) is called the permutational hypermap of H.
Proposition 3.2 H covers the hypermap P−= (P ; A−1, B−1).
Proof. The assignment ϕa 7→ A, ϕb 7→ B extends to an epimorphism Aut(H) → P . By
Proposition 2.8, H ∼= (Aut(H); (ϕa)−1, (ϕb)−1), thus H− covers P, or equivalently, H covers
P−.
3.2 Permutational hypermap of a regular oriented hypermap 19 Proof. Consider the action of P on the set of hyperfaces. The stabilizer of the “hyperface 1” is the group generated by A and by transitivity, the orbit of a hyperface is the set {1, ..., F } of hyperfaces. By the Orbit-Stabilizer Theorem, |P | = F |A|.
From the covering H → P−, one has n = 0 mod |A|.
Additionally, in [24] one can find the following result:
Corollary 3.4 For each divisor k of |A|, the number of hyperfaces fixed by Ak must divide F .
Let H be a regular oriented hypermap with more than 2 hyperfaces and let r and s be the number of hyperfaces around the hypervertices and hyperedges, respectively. As observed in [9]:
Proposition 3.5 Up to a (0,1)-duality, r ≥ s, r ≥ 3 and s ≥ 2.
Proof. As H has more than 2 hyperfaces, r, s ≥ 2 and one of the following situations must occur: either r ≥ 3 or s ≥ 3. Up to a (0,1)-duality we may assume that r ≥ s. With this, r is at least 3.
Let K, bK, b2K, ... brK be the hyperfaces labeled with 1, 2, ..., r, respectively. With this,
the first cycle of B (that is, the cycle containing 1) is (1, 2, 3, ..., r), the length of the first cycle of AB is s and 1(AB) = 2.
Example 3.6 For a hypermap with 3 hyperfaces two situations can occur, either r = 3 and
s = 2, or r = s = 3. Suppose that r = 3 and s = 2. The hyperfaces are displayed around v and e for a fixed "dart 1" (the black flag represented in the picture) as follows:
... v e ... 1 2 2 3 1 2 1 2 3 1
The permutational hypermap is, in this case, P = (P ; A, B) with B = (1, 2, 3), AB = (1, 2) and thus A = (2, 3). The group of permutations is dihedral, P = hA, B | A2 = B3 = (AB)2=
20 Chapter 3. Preamble to the classification
In general, B can be written as a product of cycles. Let us label the hyperfaces in such a way that
B = (1, ..., r)(r + 1, ..., r + c2) ... (r + ck−1+ 1, ..., f )
where ci is the length of the cycle i, i ∈ {1, ..., k} (in particular, c1 = r) and the number of
hyperfaces that are not fixed by B is f :=
k
X
i=1
ci. This means that the possibilities for B can
be established, up to a relabeling of the hyperfaces, for a fixed r and for a fixed number F of hyperfaces.
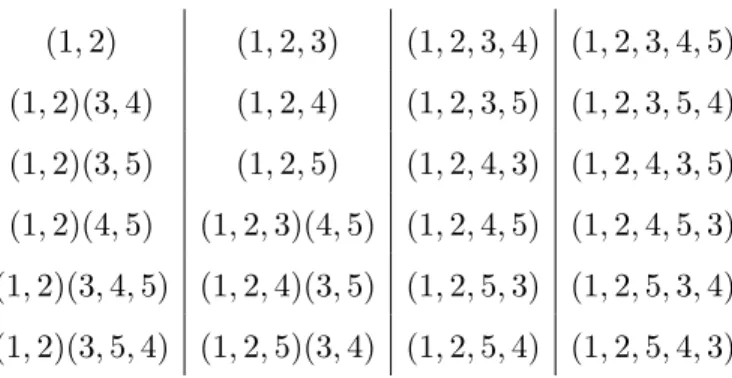
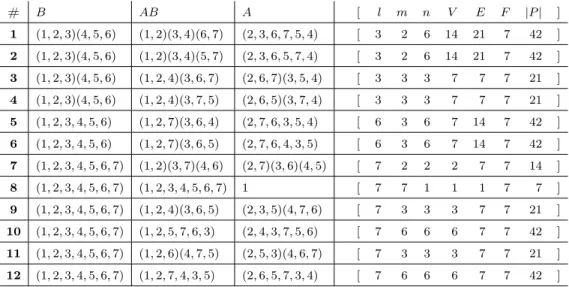
Example 3.7 The possibilities for B when r = 3 and F = 7 are
(1, 2, 3), (1, 2, 3)(4, 5), (1, 2, 3)(4, 5, 6), (1, 2, 3)(4, 5, 6, 7), (1, 2, 3)(4, 5)(6, 7).
With this, we have the following conditions for the permutational hypermap, up to a relabeling of the hyperfaces, and up to a (0,1)-duality,
1. r ≥ s, r ≥ 3 and s ≥ 2;
2. B = (1, ..., r)(r + 1, ..., r + c2) ... (r + ck−1+ 1, ..., f );
3. 1(AB) = 2 and the length of the first cycle of AB is s; 4. P acts transitively on {1, ..., F };
5. If k is a divisor of |A|, then the number of hyperfaces fixed by Ak also divides F ;
6. P has F hyperfaces.
Additionally, the possibilities for the permutation AB are established up to a relabeling of the hyperfaces fixed by B. More precisely, (AB)0is a relabeling of AB if there exists a permutation
δ ∈ SF centralizing B, such that (AB)δ= (AB)0.
Example 3.8 Consider B = (1, 2, 3, 4). The permutation AB = (1, 2, 5, 4) is a relabeling
of AB = (1, 2, 3, 5). For δ = (1, 2, 3, 4), one has Bδ = B and (1, 2, 5, 4)δ = (1, 2, 3, 5). In
this case, the pairs (B, AB) = ((1, 2, 3, 4), (1, 2, 5, 4)) and (B, AB) = ((1, 2, 3, 4), (1, 2, 3, 5)) correspond to the same permutational hypermap.
3.2 Permutational hypermap of a regular oriented hypermap 21 Using this process, we determine the list of all permutational hypermaps for a fixed number of hyperfaces.
Now the problem is to determine the monodromy group of a regular oriented hypermap H with F hyperfaces of valency n, with two given permutations A and B satisfying the conditions listed above.
A priori, one has the following relations on G:
an= 1 , where n = 0 mod |A| ;
br = au, for some u ∈ {0, . . . , n − 1} ;
(ab)s= av, for some v ∈ {0, . . . , n − 1}.
We use the underlying hypergraph of H to obtain other relations for the monodromy group. The permutations A and B give the arrangement of the hyperfaces around a fixed hyperface and a hypervertex, respectively (as in Fig.3.2). By the regularity of the action of G on itself by right multiplication, a repetition of a hyperface corresponds to a word in F (a, b) laying in
hai. We have to collect the sufficient number of relations on G to guaranty that |G : K| = F .
With this we get a group depending on parameters n, u, v and w1, ..., wj ∈ {0, . . . , n − 1},
Gn,u,v,w1,...wj = ha, b | an= 1, br= au, (ab)s= av, W1(a, b) = aw1, ..., W
j(a, b) = awji
where W1(a, b), ..., Wj(a, b) ∈ F (a, b).
The classification is completed when we get the necessary and sufficient conditions on the pa-rameters to guaranty that Hn,u,v,w1,...wj := (Gn,u,v,w1,...wj; a, b) is a regular oriented hypermap with F hyperfaces of valency n.
Chapter 4
Reflexible hypermaps with 3 and 4
hyperfaces
4.1
Introduction
The regular orientable hypermaps with 1 and 2 hyperfaces were classified by Breda d’Azevedo in [3] and the chiral hypermaps with at most 4 hyperfaces were classified by Breda d’Azevedo and Nedela in [9] (see sections 2.7 and 2.8). In this Chapter we complete the classification of all regular oriented hypermaps up to 4 hyperfaces with the reflexible hypermaps with 3 and 4 hyperfaces, included in [4]. For the understanding of this chapter we refer the reader to Chapter [3]. All the notations that were introduced there hold in the following sections.
4.2
Reflexible hypermaps with 3 hyperfaces
Theorem 4.1 Any reflexible hypermap with 3 hyperfaces is, up to a (0,1)-duality, isomorphic
to T1 n,u,v =
¡
Tn; a, bau−v+2
¢
for some even numbers n, u and v such that 3v − 2u = 6 mod n, or to Tn,u2 = (Gn,u; a, b) for some integers n and u, where
Tn= ha, b | an= 1, b3= 1, (ab)2 = a2, [a2, b] = 1i and Gn,u= ha, b | an= 1, b3 = au, [a, b] = 1i.
Moreover, each element of this family is a reflexible hypermap with 3 hyperfaces of valency n.
24 Chapter 4. Reflexible hypermaps with 3 and 4 hyperfaces
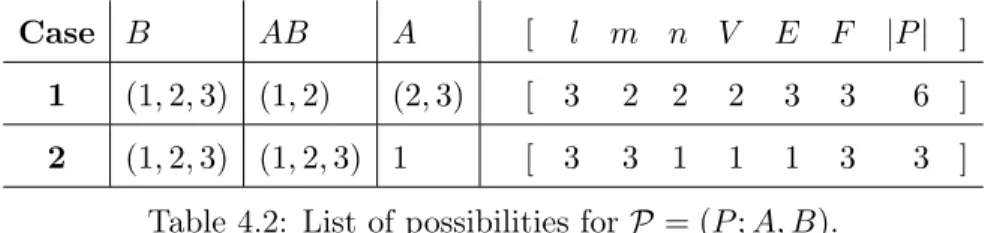
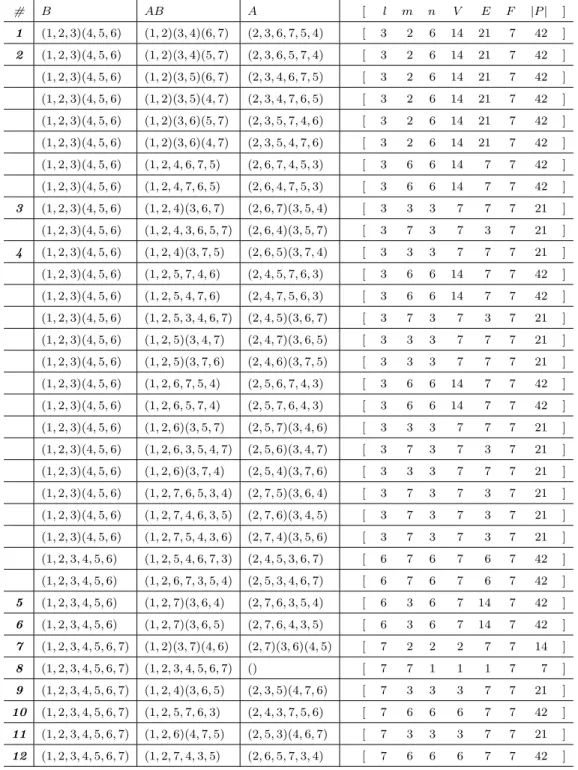
Proof. Consider a reflexible hypermap T = (T ; a, b) with 3 hyperfaces. Let P = (P ; A, B) be the permutational hypermap associated to T . In the following table we list all the possibilities, up to a (0,1)-duality and a relabeling of the hyperfaces, for A and B:
Case B AB A [ l m n V E F |P | ]
1 (1, 2, 3) (1, 2) (2, 3) [ 3 2 2 2 3 3 6 ]
2 (1, 2, 3) (1, 2, 3) 1 [ 3 3 1 1 1 3 3 ]
Table 4.2: List of possibilities for P = (P ; A, B).
The permutational hypermap P is in both cases spherical. In the first case the group of permutations P is dihedral D3 because it is generated by two involutions and in the second one is cyclic C3.
Case 1: Suppose that T has permutational hypermap P = (P ; A, B) with A = (2, 3) and
B = (1, 2, 3). We have an = 1, b3 = au, (ab)2 = av and b−1ab−1 = at, for some n even and
u, v, t ∈ {0, . . . , n − 1}. .. .. .. .. 1 1 2 2 3 1 2 1 1 3 3 2 3 1 2 3 ... Let T1
n,u,v,t be the group with presentation
ha, b | an= 1, b3 = au, (ab)2 = av, b−1ab−1= ati
and let K be the subgroup generated by a. From the relations (ab)2= av, b−1ab−1 = at and
b3= au, we get ba = av−1b−1, b−1a = atb and b−1 = a−ub2, respectively. Then Kb−1 = Kb2,
Kb3= K, Kba = Kb−1= Kb2, Kb2a = Kb−1a = Kb, and so T1
n,u,v,tis partitioned in 3 cosets
K, Kb and Kb2. Hence
M on(T ) = Tn,u,v,t1
4.2 Reflexible hypermaps with 3 hyperfaces 25 As Kba = Kb2 and Kba2 = Kb, Kbai = Kb or Kb2 according as i is even or odd. From
Kbau = Kbav = Kb and Kbat = Kb2 we deduct that u and v are even and t is odd. As
b−1a2b = ba2b−1 = av+t−1, a2 commutes with b2. As a2 also commutes with b3, we have
that a2 commutes with b. Hence v + t − 1 = 2 mod n, or equivalently, t = 3 − v mod n.
Then a3−v = b−1ab−1 = b2ab2a−2u = bav−1ba−2u = av−2baba−2u = a2v−3−2u, which gives
3v − 2u − 6 = 0 mod n. The last relation can then be replaced by [a2, b] = 1, therefore
T = Tn,u,v1 := ha, b | an= 1, b3 = au, (ab)2 = av, [a2, b] = 1i
for some n, u and v even and 3v − 2u − 6 = 0 mod n.
Consider the particular cases with u = 0 and v = 2, which satisfies the congruency 3v−2u−6 = 0 mod n, for any n,
Tn:= Tn,0,21 = ha, b | an= 1, b3= 1, (ab)2 = a2, [a2, b] = 1i.
Changing the generators a0 = a, b0 = bau−v+2, where u, v are even integers satisfying the congruency 3v − 2u − 6 = 0 mod n, we get T1
n,u,v. Hence up to a (0,1)-duality a non-canonical
metacyclic hypermap with 3 hyperfaces is isomorphic to Tn,u,v1 := ¡Tn; a, bau−v+2
¢
for some even numbers n, u and v with 3v − 2u − 6 = 0 mod n.
Now we show that under these conditions on n, u and v, T1
n,u,v is a reflexible hypermap with
3 hyperfaces of valency n.
Firstly, by the Substitution Test (see [16], p. 44), the function a 7→ a−1, b 7→ b−1 extends to
an automorphism of T1
n,u,v and so Tn,u,v1 :=
¡
Tn; a, bau−v+2
¢
is reflexible.
Now consider the abelian subgroup H of index 2 in Tn generated by b and a2. The set
U = {1, a} is a Schreier transversal for H in Tn. Let us use Reidmaster-Schreier Rewriting
Process to determine a presentation for H. A set of generators of H is given by
X∗ = { bxt−1xt | x ∈ {a, b}, t ∈ U, xt /∈ U }.
Firstly we calculate the elements bxt,
X U t
x xtb =
X U 1 a
a a 1 b 1 a
26 Chapter 4. Reflexible hypermaps with 3 and 4 hyperfaces
and then X∗ = {a2, b, a−1ba}.
Let R be the set of relators of Tn, that is R = {an, b3, (ab)2a−2, [a2, b]}. A set of relators of
H is given by
R∗ = RU = {an, b3, (ab)2a−2, [a2, b], a−1b3a, baba−1, a−1[a2, b]a}.
Now let α, β and γ denote the generators of H: α = a2, β = b and γ = a−1ba. Rewriting R∗
in terms of the generators of H, we obtain
R∗= {αn2, β3, αγβα−1, [α, β], γ3, βαγα−1, [α, γ]}. Then H = hα, β | αn2 = 1, β3 = αu2, [α, β] = 1i = C3× Cn
2, particularly H is a group of order 3n2. Thus |Tn| = 2|H| = 3n and so |Tn,u,v1 | = 3n. ♦
Case 2: This case gives a metacyclic group Gn,3,u,t = ha, b | an = 1, b3 = au, ab = ati with
u(t − 1) = 0 mod n and t3 = 1 mod n, and in [9] it was shown that this induces a reflexible
hypermap when t = 1 mod n.
Proposition 4.2 The hypermap T1
n,u,v is isomorphic to (Tn,u,v1 ; a, b) with
Tn,u,v1 = ha, b | an= 1, b3= au, (ab)2= av, [a2, b] = 1i, where n, u and v are even numbers such that 3v − 2u = 6 mod n.
Corollary 4.3 The H-sequences of Tn,u,v1 and Tn,u2 are respectively
· 3n (n, u), 2n (n, v), n; (n, u), 3 2(n, v), 3; 3n ¸ and · 3n (n, u), 3n (n, u + 3), n; (n, u), (n, u + 3), 3; 3n ¸ .
Proof. The H-sequences of these hypermaps are easily obtained from the monodromy groups. We use the presentation of the monodromy group of T1
n,u,v given in Proposition 4.2
and the presentation of the monodromy group of Tn,u2 included in Theorem 4.1. The hypermap T1
n,u,v is a covering of D = (D3; A, B) with D3 = hA, B | A2, (AB)2, B3i,
4.3 Reflexible hypermaps with 4 hyperfaces 27
b3= au, we deduce that, q = n
(n,u). Hence the order of b is |b| = (n,u)3n . Similarly, as (ab)2= av,
one has |ab| = 2n (n,v).
The canonical metacyclic hypermap T2
n,u covers C = (C3; 1, B) with C3 = hB | B3 = 1i thus
3 is a divisor of |b| and |ab|. As b3 = au and (ab)3 = a3b3 = au+3, the order of b is 3n (n,u) and
the order of a is (n,u+3)3n .
The number of hypervertices and of hyperedges are obtained dividing the order of the group by the order of b and ab respectively.
4.3
Reflexible hypermaps with 4 hyperfaces
Theorem 4.4 Any reflexible hypermap with 4 hyperfaces is, up to a (0,1)-duality, isomorphic
to one of the following hypermaps:
Q1n,u,v = (Q1n,u,v; a, b), Q2n,u,v = (Q1n,u,v; a, b−1), Q3n,u,v,t = (Q3n,u,v,t; a, b)
Q4(I)n,u = (G(I)n,u; a, b) or to Q4(II)n,u = (G(II)n,u; a, b),
where Q1
n,u,v = ha, b | an= 1, b3 = au, (ab)2 = av, [a3, b] = 1i
with n, u, v = 0 mod 3 and 4u − 6v + 12 = 0 mod n; Q3
n,u,v,t= ha, b | an= 1, b4 = au, (ab)2= av, b−2ab2 = at, [a2, b2] = 1i
when n, u, v are even, t is odd, 2(t − 1) = 0 mod n and
(2v − u − t − 3)u2 = (2v − u − t − 3)v2 = (2v − u − t − 3)t−12 = 0 mod n;
G4(I)n,u := ha, b | an= 1, b4 = au, [a, b] = 1i with n and u being any integers
and
G4(II)n,u := ha, b | an= 1, b4= au, bab−1 = a−1i with 2u = 0 mod n.
Moreover, all these hypermaps are reflexible and have 4 hyperfaces of valency n.
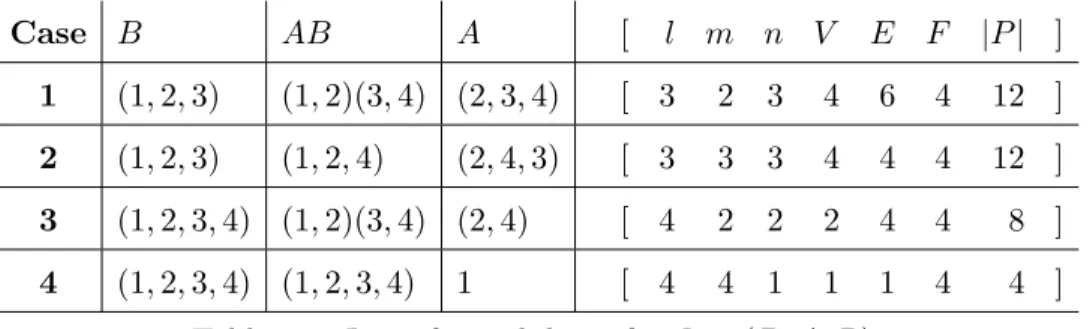
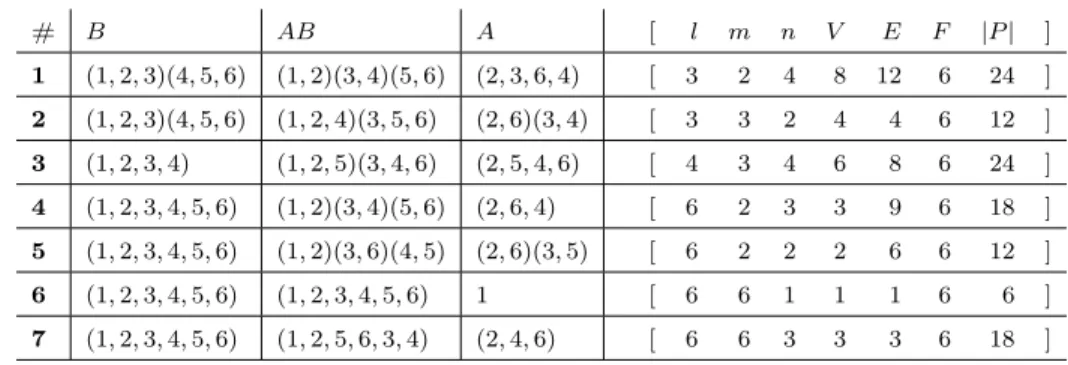
Proof. Let Q = (Q; a, b) be an oriented hypermap with 4 hyperfaces. We have only four possibilities, up to a (0,1)-duality, for the permutational hypermap P = (P ; A, B). They are listed in table 4.3.
28 Chapter 4. Reflexible hypermaps with 3 and 4 hyperfaces Case B AB A [ l m n V E F |P | ] 1 (1, 2, 3) (1, 2)(3, 4) (2, 3, 4) [ 3 2 3 4 6 4 12 ] 2 (1, 2, 3) (1, 2, 4) (2, 4, 3) [ 3 3 3 4 4 4 12 ] 3 (1, 2, 3, 4) (1, 2)(3, 4) (2, 4) [ 4 2 2 2 4 4 8 ] 4 (1, 2, 3, 4) (1, 2, 3, 4) 1 [ 4 4 1 1 1 4 4 ]
Table 4.3: List of possibilities for P = (P ; A, B).
In the first two cases, the permutational hypermaps have alternating group A4, in the third
case the permutational hypermap is dihedral and in the last case the monodromy group of the permutational hypermap is cyclic. Let Pi= (Pi; A, B) denote the hypermap of case i.
P1 = hA, B | A3, (AB)2, B3i = A4
P2 = hA, B | A3, (AB−1)2, B3i = A4
P3 = hA, B | A2, (AB)2, B4i = D4
P4 = hB | B4i = C4
Case 1: Suppose that Q = (Q; a, b) has permutational hypermap P1. In this case we have
an = 1, b3 = au, (ab)2 = av, b−1a2b−1 = at and ba−1b
= aw for some n = 0 mod 3 and
u, v, t, w ∈ {0, . . . , n − 1}. .. .. 2 3 1 3 4 1 3 3 1 4 .. .. .. .. 2 4 4 1 1 4 4 4 3 1 4 1 .. 4 4 2 .. 4 .. 4 2 .. 3 2 ... ...
From these relations we also deduce that ba3b−1, b−1a3b and b2a2b−1 are elements of K = hai,
4.3 Reflexible hypermaps with 4 hyperfaces 29 This means that the monodromy group Q of the hypermap corresponding to this case has presentation
ha, b | an= 1, b3 = au, (ab)2= av, b−1a2b−1= at, ba−1b = awi
for some n = 0 mod 3, u, v, t ∈ {0, . . . , n − 1}.
Since b−1a3b = ba3b−1= av+t−1, b2commutes with a3, and since b3 ∈ Z(Q), b commutes with
a3. From Kba = Kb2 and Kba3= Kb, one has Kbai= Kb, Kb2 or Kba2according as i = 0, 1
or 2 mod 3. Since Kbau = Kbav = Kb and Kbat= Kb2, we get u = 0 mod 3, v = 0 mod 3
and t = 1 mod 3. Using the relation [a3, b] = 1, we deduce that b−1a2b−1 = b−1a−1b−1a3 =
a4−v, that is, the fourth relation can be replaced by [a3, b] = 1. From ba−1b
= b−1aba−1b =
b−2av−2b = av−3b−2ab = av−u−3bab = a2v−u−4 we have au = a6v−3u−12 and the last equation
is redundant. Thus
Q = Q1n,u,v := ha, b | an= 1, b3= au, (ab)2 = av, [a3, b] = 1i
with n, u, v = 0 mod 3 and 4u − 6v + 12 = 0 mod n. To show that, under these conditions, Q1
n,u,v is the monodromy group of a regular oriented
hypermap with 4 hyperfaces of valency n, consider the normal subgroup H = ha3i which
factors Q1
n,u,v onto A4. To get a presentation for H, we use the Reidmaster-Schreier Rewriting
Process.
Applying the method known as Systematic Enumeration of Cosets of J. A. Todd and H. S. M. Coxeter [21], the following tables prove that
T = {1, a, a−1, b, b−1, ab, ba, a−1b, ba−1, b−1a, ab−1, ab−1a}
is a Schreier transversal for H in Q1 n,u,v:
Definition : 2 := 1a, 3 := 2a, 4 := 1b, 5 := 4b, 6 := 2b, 7 := 6b, 8 := 4a, 9 := 3b, 10 := 5a, 11 := 8a, 12 := 7a
Bonus : 3a = 1, 6a = 5, 8a = 11, 9a = 7, 10a = 6, 11a = 4, 12a = 9, 5b = 1, 7b = 2, 8b = 3, 9b = 8, 10b = 11, 11b = 12, 12b = 10
a a a
30 Chapter 4. Reflexible hypermaps with 3 and 4 hyperfaces b b b a−u 1 4 5 1 1 2 6 7 2 2 3 9 8 3 3 4 5 1 4 4 5 1 4 5 5 6 7 2 6 6 7 2 6 7 7 8 3 9 8 8 9 8 3 9 9 10 11 12 10 10 11 12 10 11 11 12 10 11 12 12 a b a b a−v 1 2 6 5 1 1 2 3 9 7 2 2 3 1 4 8 3 3 4 8 3 1 4 4 5 10 11 4 5 5 6 5 1 2 6 6 7 12 10 6 7 7 8 11 12 9 8 8 9 7 2 3 9 9 10 6 7 12 10 10 11 4 5 10 11 11 12 9 8 11 12 12 a−1 a−1 a−1 b−1 a a a b 1 3 2 1 5 10 6 5 1 2 1 3 2 7 12 9 7 2 3 2 1 3 8 11 4 8 3 4 11 8 4 1 2 3 1 4 5 6 10 5 4 8 11 4 5 6 10 5 6 2 3 1 2 6 7 9 12 7 6 5 10 6 7 8 4 11 8 9 7 12 9 8 9 12 7 9 3 1 2 3 9 10 5 6 10 12 9 7 12 10 11 8 4 11 10 6 5 10 11 12 7 9 12 11 4 8 11 12
Now let us calculate a set X∗ of generators of H. Let X denote the set of generators of Q1 n,u,v, X = {a, b}. X T t x xtb = X T 1 a a−1 b b−1 ab ba a−1b ba−1 b−1a ab−1 ab−1a a a a−1 1 ab ab−1 a−1b b−1 b b−1a ab−1a ba ba−1 b b ba ba−1 b−1 1 a−1 b−1a ab−1a ab a a−1b ab−1
The set of generators is then:
X∗ = { bxt−1xt | x ∈ X, t ∈ T, xt /∈ T }
= {a3, b−1a3b, (ba)2, a−1baba−1, a−1b−1a2b−1, ab−1a2b−1a, b3, (ab)2, a−1b3a, (a−1b)3,
4.3 Reflexible hypermaps with 4 hyperfaces 31 Conjugating the relators of Q1
n,u,v by the elements of the transversal T we get a set of relators
for H. Let R denote the set of relatores of Q1 n,u,v. T R an b3a−u ababa−v a−3b−1a3b 1 an b3a−u ababa−v a−3b−1a3b a an a−1b3a−u+1 baba−v+1 a−4b−1a3ba a−1 an ab3a−u−1 a2baba−v−1 a−2b−1a3ba−1 b b−1anb b2a−ub b−1ababa−vb b−1a−3b−1a3b2 b−1 banb−1 b4a−ub−1 bababa−vb−1 ba−3b−1a3
ab b−1anb b−1a−1b3a−u+1b aba−v+1b b−1a−4b−1a3bab
ba a−1b−1anba a−1b2a−uba a−1b−1ababa−vba a−1b−1a−3b−1a3b2a
a−1b b−1anb b−1ab3a−u−1b b−1a2baba−v−1b b−1a−2b−1a3ba−1b ba−1 ab−1anba−1 ab2a−uba−1 ab−1ababa−vba−1 ab−1a−3b−1a3b2a−1 b−1a a−1banb−1a a−1b4a−ub−1a a−1bababa−vb−1a a−1ba−3b−1a4
ab−1 banb−1 ba−1b3a−u+1b−1 b2aba−v+1b−1 ba−4b−1a3bab−1 ab−1a a−1banb−1a a−1ba−1b3a−u+1b−1a a−1b2aba−v+1b−1a a−1ba−4b−1a3bab−1a
Denoting with Greek letters the generators of H as follows
α = a3, β = b3, γ = (ab)2, δ = (ba)2,
² = a−1b3a, ζ = b−1a3b, η = (a−1b)3, θ = a−1baba−1,
ι = b−1abab−1, κ = ba−1bab−1a, λ = ab−1a2b−1a, µ = a−1b−1a2b−1,
ν = b−1a−1b2a−1,
and using the rewriting process, we obtain the relators of H:
T R an b3a−u ababa−v a−3b−1a3b 1 αn3 βα−u3 γα−v3 α−1ζ a αn3 ²α−u3 δα−v3 α−1µδ a−1 αn3 γνα−u 3 αθα−v3 α−1λθ b ζn3 βζ−u3 ιβζ−v3 (βζ)−1δµβ b−1 (δµ)n3 β(δµ)−u 3 δ(δµ)−v3 (δµ)−1α ab ζn3 νγζ−u3 γζ−v3 ζ−1γ−1αγ ba µ(δµ)n−33 δ ²µ(δµ)−u+33 δ µκ²µ(δµ)−v+33 δ (²µδ)−1θλ² a−1b ζn3 ικηζ−u3 ζνλη(ζ)−v3 (ηζ)−1θλη ba−1 (λθ)n3 γν(λθ)−u3 ληζν(λθ)−v3 (νλθ)−1ζν b−1a (θλ)n3 ²(θλ)−u3 θα(θλ)−v3 (θλ)−1α ab−1 (δµ)n3 κηι(δµ)−u 3 βι(δµ)−v3 (ιδµ)−1ζι ab−1a (θλ)n3 ηικ(θλ)−u 3 ²µκ(θλ)−v3 (θλ)−1κ−1δµκ
32 Chapter 4. Reflexible hypermaps with 3 and 4 hyperfaces
Most of the relators of the previous table are redundant. In fact H is cyclic,
H = hα | αn3 = 1, α
4u−6v+12
3 = 1i .
Since 4u−6v+123 = 0 mod n3, the order of H is n3 and thus Q1
n,u,v has order 4n. This proves that
Q1
n,u,v := (G1n,u,v; a, b) is a regular oriented hypermap with 4 hyperfaces for each n, u, v = 0
mod 3 such that 6v − 4u = 12 mod n. As R(a, b) = 1 if and only if R(a−1, b−1) = 1, all these
hypermaps are reflexible. ♦
Case 2: In this case we have an= 1 and b−3, (ab−1)2, ba2b ∈ K = hai.
.. .. 1 4 1 2 3 1 3 2 4 1 4 1 2 .. .. .. .. 4 3 3 1 2 1 2
Replacing b by b−1 we obtain the relations of the previous case. Thus the hypermaps in this
case are isomorphic to (Q1
n,u,v; a, b−1). ♦
Case 3: Here the monodromy group of Q is such that an = 1, b4 = au, (ab)2 = av,
b−2ab2 = at and b−1ab−1= aw, for some even n and u, v, t, w ∈ {0, . . . , n − 1}. .. .. .. .. 4 1 2 3 4 1 2 1 1 4 4 3 3 1 2 3 ...
As before, we let K = hai. As Kba = Kb−1, Kb2a = Kb−2a = Kb−2= Kb2and Kb−1a = Kb,
the index of K in Q is at most four, namely Q/rH = {K, Kb, Kb2, Kb−1}. Moreover, Kbai