UNIVERSIDADE DO ESTADO DE SANTA CATARINA – UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS – CCT
PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA E ENGENHARIA DE MATERIAIS - PGCEM
JOÂNESSON STAHLSCHMIDT
ANÁLISE DE SENSIBILIDADE EM PROBLEMAS NÃO LINEARES VIA MÉTODO SEMI ANALÍTICO UTILIZANDO VARIÁVEIS COMPLEXAS: APLICAÇÃO EM
PARÂMETROS MATERIAIS E GEOMÉTRICOS.
JOÂNESSON STAHLSCHMIDT
ANÁLISE DE SENSIBILIDADE EM PROBLEMAS NÃO LINEARES VIA MÉTODO SEMI ANALÍTICO UTILIZANDO VARIÁVEIS COMPLEXAS: APLICAÇÃO EM
PARÂMETROS MATERIAIS E GEOMÉTRICOS.
Dissertação apresentada para a obtenção do título de Mestre em Ciência e Engenharia de Materiais da Universidade do Estado de Santa Catarina, Centro de Ciências Tecnológicas – CCT
Orientador: Dr. Pablo Andrés Muñoz Rojas
FICHA CATALOGRÁFICA
J781a
Stahlschmidt, Joânesson
Análise de Sensibilidade em Problemas Não-lineares via Método Semi-Analítico Utilizando Variáveis Complexas: Aplicação em Parâmetros Geométricos e Materiais / Joânesson Stahlschmidt;
orientador: Pablo Andrés Muñoz Rojas. – Joinville, 2013. 103 f. : il ; 30 cm.
Incluem referências.
Dissertação (mestrado) – Universidade do Estado Santa Catarina, Centro de Ciências Tecnológicas, Mestrado em Ciências e Engenharia de Materiais, Joinville, 2013.
1. Otimização. 2. Métodos de Análise de Sensibilidade. I. Munõz-Rojas, Pablo Andrés.
AGRADECIMENTOS
RESUMO
STAHLSCHMIDT, Joânesson. Análise de Sensibilidade em Problemas não Lineares via Método Semi-Analítico utilizando Variáveis Complexas: Aplicação em Parâmetros Materiais e Geométricos. 2013. 99f. Dissertação (Mestrado em Ciência e Engenharia de Materiais – Área: Modelamento Numérico de Material e Simulação de Processo) – Universidade do Estado de Santa Catarina, Programa de Pós-Graduação em Ciência e Engenharia de Materiais, Joinville, 2013.
Em problemas estruturais de otimização baseados em derivada, o cálculo da sensibilidade dos deslocamentos em relação às variáveis de projeto é uma etapa fundamental. Buscam-se métodos de análise de sensibilidade que sejam precisos, estáveis e eficientes. O aparecimento de erros durante o cálculo da sensibilidade motiva uma pesquisa significativa e o presente trabalho aborda uma forma de eliminar os erros que surgem ao se utilizar o método semi-analítico na análise de sensibilidade dos deslocamentos em relação a variáveis de projetos de forma em problemas dominados por rotação rígida. Uma formulação de elementos finitos para estruturas modeladas com elementos de barra é desenvolvida e o método de análise de sensibilidade semi-analítico com variáveis complexas é implementado visando a aplicação em problemas com não-linearidade geométrica. A sensibilidade dos deslocamentos é realizada em relação a parâmetros materiais e de forma e o método semi-analítico com variáveis complexas é comparado com outros métodos clássicos de análise de sensibilidade: método das diferenças finitas e método semi-analítico com variáveis reais. A comparação é realizada através de dois exemplos que são conhecidos na literatura por apresentar não linearidade geométrica.
ABSTRACT
STAHLSCHMIDT, Joânesson. Sensitivity Analysis for Nonlinear Problems via Complex Variables Semi-Analytical Method: Shape and Material Parameter Aplication. 2013. 99f. Dissertation (Mestrado em Ciência e Engenharia de Materiais – Área: Modelamento Numérico de Material e Simulação de Processo) – Universidade do Estado de Santa Catarina, Programa de Pós-Graduação em Ciência e Engenharia de Materiais, Joinville, 2010.
In structural optimization problems based on derivatives the calculation of the displacements sensitivity with respect to design variables is a critical step. Accurate, stable and efficient methods of sensitivity analysis are sought. The occurrence of errors during the calculation of sensitivity motivates a significant research and this paper presents a way to eliminate the errors that arise when using the semi-analytical displacements sensitivity analysis with respect to shape variables in rigid rotation dominated problems. A finite element formulation for structures modelled with bar elements is developed and the complex variable semi-analytical method is implemented in order to apply to problems with geometric nonlinearity. The sensitivity of the displacements is performed with respect to material and shape parameters and the complex variables semi-analytic method is compared to other classical methods of sensitivity analysis: the finite difference method and real variables semi-analytical method. The comparison is performed using two examples known in the literature for presenting geometric nonlinearity.
LISTA DE FIGURAS
Figura 2.1 – Decomposição Polar [Bittencourt, 1999]... 19
Figura 2.2 - Área indeformada e deformada de um corpo... 22
Figura 3.1 – Elemento finito de barra...23
Figura 3.2 – Método de Newton-Raphson [Yang e Kuo, 1994]... 43
Figura 3.3 – Divergência no método de Newton-Raphson [Yang e Kuo, 1994]... 44
Figura 3.4 – Método do controle por deslocamentos [Yang e Kuo, 1994]... 46
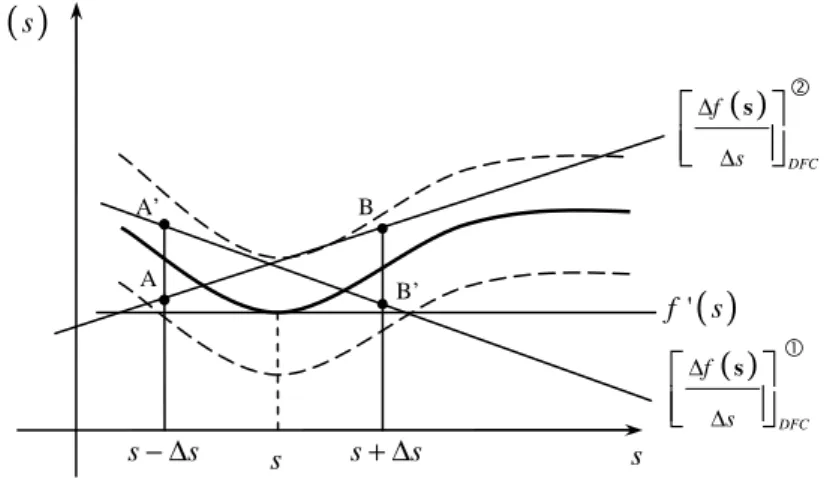
Figura 4.1 – Aproximações da derivada por diferenças finitas... 53
Figura 4.2 – Erro no método das diferenças finitas não-linear... 62
Figura 4.3 – Erro no método das diferenças finitas modificado [Muñoz-Rojas et al., 2004]... 64
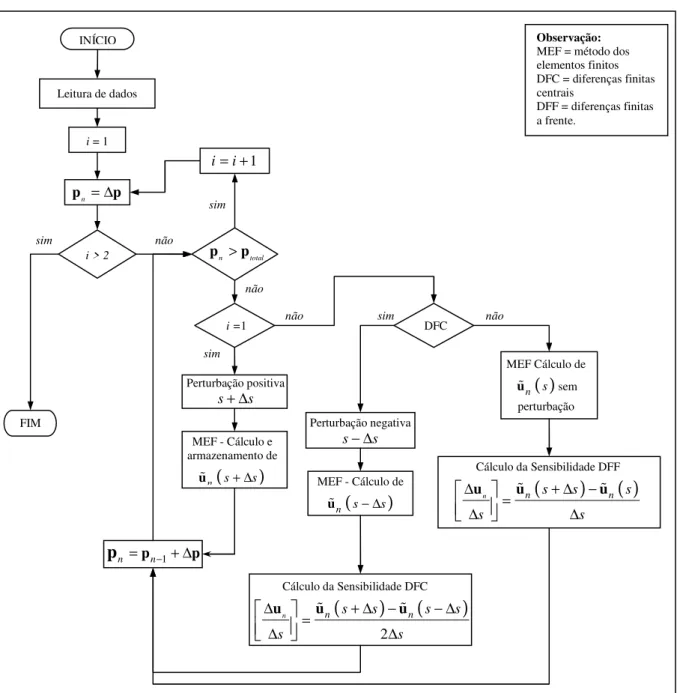
Figura 5.1 – Fluxograma do método de análise de sensibilidade por diferenças finitas implementado no programa ATENAS©...72
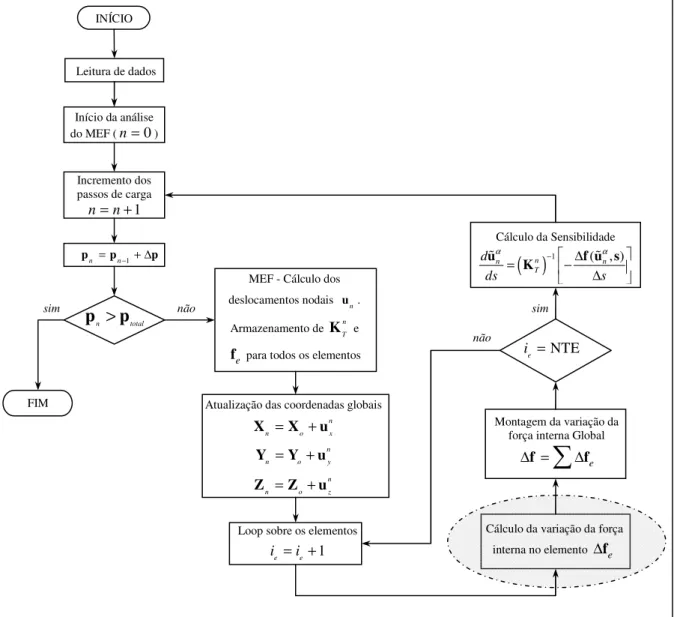
Figura 5.2 - Fluxograma do método de análise de sensibilidade semi-analítica implementado no programa ATENAS©... 74
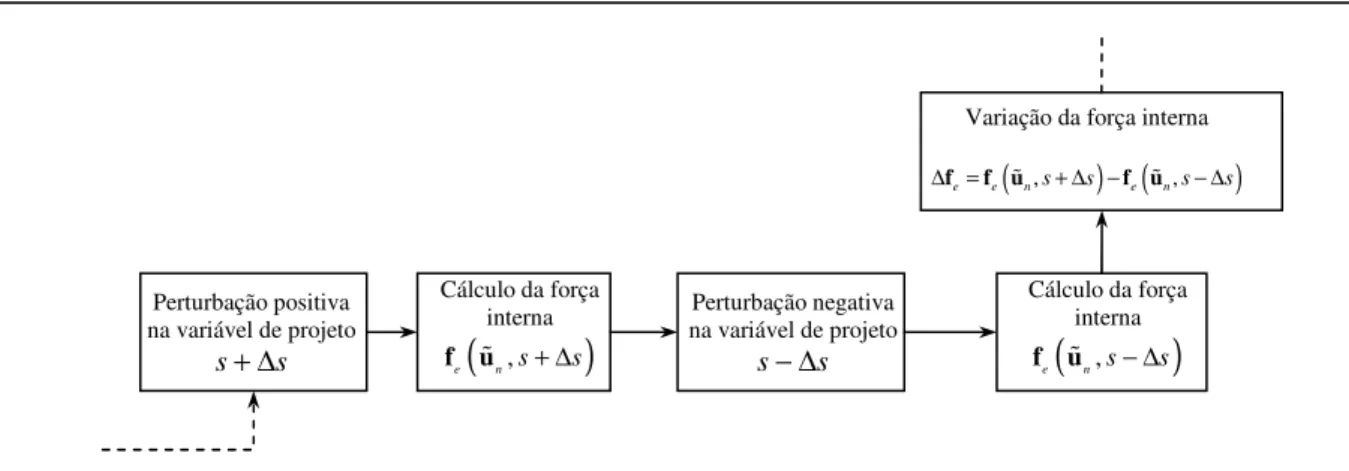
Figura 5.3 – Detalhe do cálculo da variação da força interna n e ∆f para o método semi-analítico com diferenças finitas a frente... 75
Figura 5.4 – Detalhe do cálculo da variação da força interna n e ∆f para o método semi-analítico com diferenças finitas centrais... 75
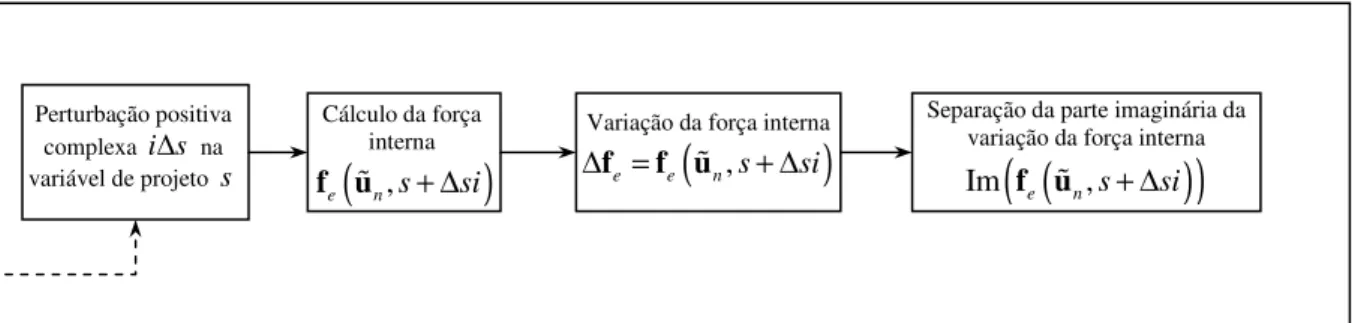
Figura 5.5 - Detalhe do cálculo da variação da força interna n e ∆f para o método semi-analítico com diferenças finitas complexa... 77
Figura 6.1 – Exemplo Snap-trhoug.... 78
Figura 6.2 – SOMñ-lin com perturbação da coordenada y... 80
Figura 6.3 - SOMñ-lin com perturbação da coordenada x... 80
Figura 6.4 - SOMñ-lin com perturbação de um parâmetro material... 81
Figura 6.5 – Viga modelada com elementos de barra... 82
Figura 6.6 – SOMlin para variável de projeto geométrica (viga modelada com 5 células)... 83
Figura 6.7 - SOMlin para variável de projeto geométrica (viga modelada com 25 células)... 84
Figura 6.8 - SOMlin para variável de projeto geométrica (viga modelada com 35 células)... 84
Figura 6.10 - Sensibilidade do deslocamento em relação a parâmetro geométrico em 1 grau de
liberdade para o caso linear (viga modelada com 25 células)... 86
Figura 6.11 - Sensibilidade do deslocamento em relação a parâmetro geométrico em 1 grau de liberdade para o caso linear (viga modelada com 35 células)... 86
Figura 6.12 – SOMñ-lin para variável de projeto geométrica (viga modelada com 5 células)...88
Figura 6.13 - SOMñ-lin para variável de projeto geométrica (viga modelada com 25 células)...88
Figura 6.14 - SOMñ-lin para variável de projeto geométrica (viga modelada com 35 células)...89
Figura 6.15 – gdl ñ-lin SOM para variável de projeto geométrica (viga modelada com 5 células)...90
Figura 6.16 - gdl ñ-lin SOM para variável de projeto geométrica (viga modelada com 25 células)...90
Figura 6.17 – gdl ñ-lin SOM para variável de projeto geométrica (viga modelada com 35 células)...91
Figura 6.18 – SOMlin para variável de projeto material (viga modelada com 5 células)... 92
Figura 6.19 - SOMlin para variável de projeto material (viga modelada com 25 células)... 92
Figura 6.20 - SOMlin para variável de projeto material (viga modelada com 35 células)... 92
Figura 6.21 – SOMñ-lin para variáveis de projeto material (viga modelada com 5 células)... 94
Figura 6.22 - SOMñ-lin para variáveis de projeto material (viga modelada com 25 células)... 94
Figura 6.23 - SOMñ-lin para variáveis de projeto material (viga modelada com 35 células)... 95
LISTA DE TABELAS
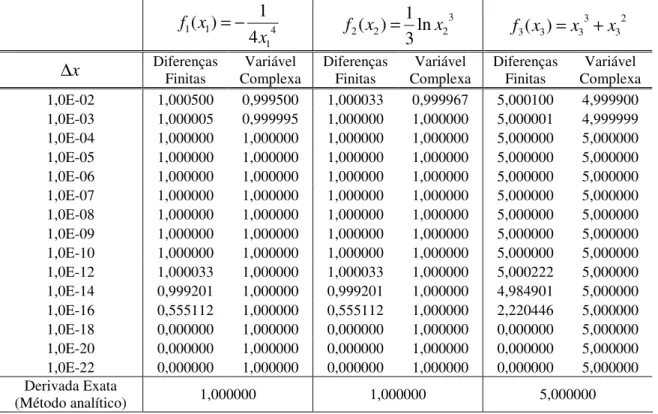
Tabela 4.1 – Comparação entre método das diferenças finitas complexo e o método das
diferenças finitas centrais... 69
Tabela 6.1 – Resultados dos gráficos 6.6, 6.7 e 6.8... 85
Tabela 6.2 - Resultados dos gráficos 6.9, 6.10 e 6.11... 87
Tabela 6.3 - Resultados dos gráficos 6.12, 6.13 e 6.14... 89
Tabela 6.4 - Resultados dos gráficos 6.15, 6.16 e 6.17... 90
Tabela 6.5 - Resultados dos gráficos 6.18, 6.19 e 6.20... 91
SUMÁRIO
Capítulo 1. Introdução... 15
1.1. Objetivo e Estrutura do Trabalho... 16
1.2. Síntese de Mecanismos... 17
Capítulo 2. Conceitos de Mecânica do Contínuo... 18
2.1. Descrição do Movimento de um Corpo... 18
2.2. Gradiente de Deformação... 18
2.3. Decomposição Polar... 19
2.4. Medidas de Deformação... 19
2.4.1. Família de Tensores de Hill...20
2.4.2. Tensor Deformação de Engenharia.... 21
2.5. Pares Energeticamente Conjugados... 21
2.6. Medidas de Tensão... 22
2.6.1. Tensão de Engenharia...22
Capítulo 3. Método dos Elementos Finitos para Treliças... 23
3.1. Princípio dos Trabalhos Virtuais... 25
3.2. Formulação Linear... 25
3.3. Formulação Não-Linear Geométrica... 29
3.3.1. Vetor Força Interna... 30
3.3.2. Matriz de Rigidez Tangente... 34
3.3.2.1. Expressão da Matriz kT2...35
3.3.2.2. Expressão da Matriz kT1...36
3.4. Métodos de Solução... 42
3.4.1. Método de Newton Raphson...42
3.4.2. Método do Controle por Deslocamentos Generalizados... 44
Capítulo 4. Análise de Sensibilidade... 47
4.1. Introdução... 47
4.2. Métodos Baseados em Variáveis Reais... 48
4.2.1. Análise de Sensibilidade em Problemas Lineares... 48
4.2.1.1. Métodos Analíticos...48
4.2.1.1.1. Abordagem da Diferenciação Direta...49
4.2.1.2. Método das Diferenças Finitas... 51
4.2.1.3. Método Semi-Analítico...53
4.2.1.4. Métodos de Correção do Erro da Sensibilidade dos deslocamentos em relação a parâmetros de forma na abordagem Semi-Analítica... 54
4.2.2. Análise de Sensibilidade em Problemas Não-Lineares Independentes da Trajetória... .56
4.2.2.1. Métodos analíticos... 57
4.2.2.1.1. Abordagem Direta... 57
4.2.2.1.2. Abordagem Adjunta... 60
4.2.2.2. Método das Diferenças Finitas... 61
4.2.2.3. Método das diferenças finitas modificado.... 63
4.2.2.4. Método Semi-Analítico...64
4.3. Métodos Baseados em Variáveis Complexas... 65
4.3.1. Análise de Sensibilidade em Problemas Lineares... 65
4.3.1.1. Método das Diferenças Finitas com Variável Complexa... 66
4.3.1.2. Método Semi-Analítico com Variáveis Complexas... 67
4.3.2. Análise de Sensibilidade em Problemas Não-Lineares... 68
Capítulo 5. Aspectos da Implementação dos Métodos de Análise de Sensibilidade... 71
5.1 Implementação da análise de sensibilidade por diferenças finitas... 71
5.2 Implementação da análise de sensibilidade Semi-Analítica...73
5.2.1 Implementação da análise de sensibilidade Semi-Analítica com diferenças finitas à frente... 74
5.2.2 Implementação da análise de sensibilidade Semi-Analítica com diferenças finitas centrais...75
5.3 Implementação da análise de sensibilidade Semi-Analítica com diferenças finitas complexa...76
Capítulo 6. Exemplos e Discussão dos Resultados... 78
6.1. Snap-Through... 78
6.1.1. – Snap-Through - Sensibilidade dos deslocamentos em relação a parâmetros geométricos... 79
6.1.2. – Snap-Through - Sensibilidade dos deslocamentos em relação a parâmetros materiais...81
6.2.1. Sensibilidade dos deslocamentos em relação a parâmetros
geométricos...82
6.2.1.1. Formulação linear... 83
6.2.1.2. Formulação Não Linear... 87
6.2.2. Sensibilidade dos Deslocamentos em Relação a Parâmetros Materiais... 91
6.2.2.1. Formulação Linear... 91
6.2.2.2. Formulação Não Linear... 93
Capítulo 7. Considerações Finais e Sugestões para Trabalhos Futuros... 97
Capítulo 1. Introdução
Uma grande variedade de problemas de análise estrutural se baseia na avaliação da resposta de corpos deformáveis sujeitos a carregamentos estáticos ou dinâmicos. Essas respostas, tais como deslocamento, tensão, deformação, freqüência natural, carga de flambagem, respostas acústicas, termoelásticas, entre outras, são dependentes implicitamente de parâmetros através das equações de governo estruturais. Quando esses parâmetros em fase de projeto podem ser modificados, são chamados de variáveis de projeto e a dependência das respostas estruturais com relação a eles recebe o nome de análise de sensibilidade. A sua aplicação não se restringe apenas problemas estruturais e pode ser encontrada na modelagem de sistemas de controle, análise de confiabilidade ou em disciplinas como termodinâmica, mecânica dos fluidos e transferência de calor [Kleiber, 1997].
O gradiente da resposta estrutural com relação à variável de projeto geralmente é a informação que se procura na análise de sensibilidade (ou em alguns casos a derivada de ordem superior). Uma grande variedade de métodos têm sido desenvolvidos para a realização da análise de sensibilidade sendo que, para problemas lineares, estes encontram-se bem estabelecidos. Em problemas que apresentam algum tipo de não-linearidade (material, geométrica, cinemática, etc), uma pesquisa significativa vem sendo dedicada ao desenvolvimento de métodos para a determinação de campos de sensibilidade [Kleiber et al., 1997], [Choi et al., 2005].
As abordagens para encontrar a sensibilidade costumam ser divididas em três grupos: métodos analíticos, método das diferenças finitas, e método semi-analítico. Cada uma dessas abordagens possui vantagens e desvantagens conforme será apresentado no capítulo 4. No cálculo da sensibilidade dos deslocamentos com relação a variáveis de forma utilizando o método semi-analítico, uma grande dificuldade se verifica: erros inaceitáveis surgem com a aplicação deste método em problemas dominados por rotação de corpo rígido.
deslocamentos em relação a parâmetros de forma em problemas lineares e não lineares com rotação de corpo rígido.
1.1. Objetivo e estrutura do trabalho
O presente trabalho apresenta uma formulação de elementos finitos para a análise não linear geométrica de problemas modelados com elementos de barra bem como para a análise de sensibilidade de deslocamentos com relação a parâmetros materiais e de forma. O principal objetivo é a implementação do método de análise de sensibilidade semi-analítica usando variáveis complexas, com aplicação em problemas não lineares. Estuda-se a sensibilidade em relação a parâmetros materiais e de forma comparando esta estratégia com outros métodos clássicos de análise de sensibilidade: diferenças finitas à frente e método semi-analítico com variáveis reais. Na revisão bibliográfica realizada neste trabalho encontra-se apenas um autor [Jin e Dennis, 2009] que implementa o método semi-analítico com variáveis complexas para problemas não lineares. No entanto, a presente contribuição pretende realizar um estudo mais detalhado deste método para problemas modelados com elementos de barras. O trabalho está organizado em 7 capítulos:
Capítulo 1. Introdução. Apresenta uma breve introdução do trabalho e são descritos os principais objetivos.
Capítulo 2. Conceitos de Mecânica do Contínuo. Aqui os tensores de deformação e de tensão são apresentados e uma pequena revisão de mecânica do contínuo está descrita
Capítulo 3. Método dos Elementos Finitos para Treliça. Neste capítulo é apresentada uma formulação do método dos elementos finitos para estruturas modeladas com elementos de barras sujeitas a não linearidade geométrica. As expressões da matriz de rigidez tangente consistente são desenvolvidas e destaca-se que o uso dessa matriz, decorrente da linearização exata do problema não-linear de equilíbrio, é necessária para aplicação na etapa de cálculo da sensibilidade, detalhada no capítulo 4. Uma revisão dos métodos de solução de problemas não lineares utilizadas no trabalho finaliza o capítulo.
baseados em variáveis complexas para problemas lineares e problemas não lineares independentes da trajetória são apresentados, finalizando o capítulo.
Capítulo 5. Aspectos da Implementação dos Métodos de Análise de Sensibilidade. É apresentada a forma como foram implementados os métodos de análise de sensibilidade no programa ATENAS© (programa desenvolvido por P. A. Muñoz-Rojas) com fluxogramas
explicativos.
Capítulo 6. Exemplos e Discussão dos Resultados. O estudo dos métodos de análise de sensibilidade é realizado através de exemplos. Os resultados destes estudos são apresentados e é realizada uma comparação da faixa de estabilidade de cada método de análise de sensibilidade.
Capítulo 2. Conceitos de Mecânica do Contínuo
A seguir será feita uma revisão dos principais conceitos de mecânica do contínuo aplicados na formulação de treliças geometricamente não-lineares apresentada no capítulo 3.
2.1. Descrição do Movimento de um Corpo
Existem duas maneiras básicas para definir o movimento de um corpo contínuo: Lagrangeana e Euleriana. De acordo com a configuração do sistema de referência adotado, a descrição Lagrangeana pode ser descrita em três formulações particulares
• Descrição Lagrangeana Total: em qualquer passo incremental, a configuração inicial
o
t é adotada como a referência
• Descrição Lagrangeana Atualizada: no n-ésimo passo incremetal tn, a referência é a
configuração no estado de equilíbrio anterior tn−1.
• Descrição Lagrangeana Corrente: no n-ésimo passo incremental tn, a referência
adotada é a mesma n-ésima configuração tn.
A descrição Euleriana mantém um ponto particular no espaço fixo e monitora o fluxo de material através deste ponto ao longo do tempo.
Nas seções seguintes serão utilizados símbolos X em maiúsculo para representar a configuração de referência (t0) e símbolos x em minúsculo para representar a configuração
corrente. Uma descrição Lagrangeana é representada por
( ) ( )
t = ,tx x X (2.1)
enquanto uma descrição Euleriana pode ser representada como
( )
t =( )
,tX X x (2.2)
2.2. Gradiente de Deformação
tensor F, chamado de gradiente de deformação que relaciona uma linha na configuração inicial dX com a sua configuração deformada dx, ou seja,
dx F X= d (2.3)
ou
i ij j
dx =F dX (2.4)
2.3 Decomposição Polar
É possível decompor o gradiente de deformação F em duas parcelas: um tensor ortogonal R representando as rotações rígidas e um tensor simétrico positivo-definido U ou V, dependendo da ordem de aplicação em dX, ou seja
= =
F RU VR (2.5)
Figura 2.1 – Decomposição Polar [Bittencourt, 1999].
Nota-se que com o tensor U a deformação é aplicada na configuração original do corpo, antes de ser rotacionado. Já o tensor V é Euleriano aplica o alongamento com o corpo já rotacionado.
2.4. Medidas de Deformação
devem ser construídas de forma que não ocorra tensões devido ao movimento de corpo rígido. Diversas definições são possíveis quando o corpo está sujeito a deformações finitas, no entanto, utiliza-se na prática uma família de tensores, denominadas tensores de Hill, que são “regularizados” de maneira a fornecer uma deformação nula em situações como, por exemplo, movimento de corpo rígido.
2.4.1 Família de Tensores de Hill
Os tensores de Hill podem ser genericamente definidos como
(
)
1
α α
α
= −
ε U I (2.6)
De acordo com a escolha do valor de α diferentes medidas de deformação são obtidas.
Algumas dessas medidas são:
• α = 0 - Tensor deformação Logarítmico ou de Hencky (ε0 =εL =lnU). Esta
expressão é obtida da equação 2.6 aplicando o limite de α → 0 através da regra de L’Hôpital.
• α =1 - Tensor deformação de Biot (ε1 =εB =εE = −U I). O tensor deformação de
Engenharia mantém o sistema de referência fixo enquanto o tensor deformação de
Biot confunde-se com o tensor deformação de engenharia rotacionado (εE).
• α =2 - Tensor deformação de Green-Lagrange ( 2 1
(
2) (
1 T)
2 2
G
= = − = −
ε ε U I U U I )
No caso de barras em que só há deformação na direção axial, particulariza-se a definição dos tensores de Hill pela sua componente na direção axial, ou seja
(
1)
1
1
α λα
α
= −
ε (2.7)
onde λ1 é o stretch (alongamento) da barra e desta forma para diferentes valores de α , obtém-se os tensores
• α = 0 → 0 L
1
• α =1 → B 1
ε = −λ 1 (Biot, equivalente ao tensor deformação de Engenharia
rotacionado, εE =εB).
• α =1 → GL
(
)
1
1
ε 1
2 λ
= − (Green-Lagrange).
onde
E E
barra E
ε ε ε ε ε 0 0
ε ε ε 0 0 0
ε ε ε 0 0 0
xx xy xz
yx yy yz
zx zy zz
=
= =
ε (2.8)
2.4.2. Tensor Deformação de Engenharia
Em análises com pequenas deformações todos os tensores de deformação apresentados convergem para a mesma medida, a qual é obtida desconsiderando a contribuição não-linear. Obtém-se dessa forma o tensor deformação de Engenharia, representado por
E 1
2
o i j
ij
j i
u u
X X
ε = ∂ +∂
∂ ∂
(2.9)
onde o índice “o” refere-se ao referencial original (não rotacionado).
2.5. Pares Energeticamente Conjugados
Visto a dificuldade em mecânica do contínuo não linear de definir, a princípio, o domínio de integração a fim de satisfazer as equações de equilíbrio na configuração do corpo
deformado, no instante t, contorna-se esse problema definindo medidas de tensão no corpo no
instante t referenciadas à configuração indeformada. É possível trabalhar com medidas de
Neste trabalho utiliza-se o par tensão de engenharia rotacionado e o tensor deformação de engenharia rotacionado (Biot) que são energeticamente conjugados.
2.6 Medidas de Tensão
2.6.1 Tensão de Engenharia
Se as deformações e os deslocamentos são pequenos, a área deformada A é aproximadamente igual à área inicial Ao, ou seja A A≅ o(figura 2.2). Neste caso,
E
0
lim
Α A
o o
d d
∆ →
∆
= =
∆
A
p p
T (2.10)
e
E = E
T σ N (2.11)
onde T é o vetor tensão de engenharia e σE é o tensor tensão de engenharia rotacionado, que
para o caso de barra é dado por
E E
barra E
σ σ σ σ σ 0 0
σ σ σ 0 0 0
σ σ σ 0 0 0
xx xy xz
yx yy yz
zx zy zz
=
= =
σ
Figura 2.2 - Área indeformada e deformada de um corpo.
o ∆Α
p
N
X1
Capítulo 3. Método dos Elementos Finitos para Treliça
Conforme será visto no capítulo 4, em problemas não-lineares o cálculo da sensibilidade dos deslocamentos possui uma dependência direta da matriz de rigidez tangente e esta deve ser obtida via linearização exata do vetor força interna. A utilização de uma matriz de rigidez tangente exata resulta no método de Newton-Raphson “full” que tem características de
convergência quadrática. Qualquer aproximação feita na derivada da força interna resulta na perda desta propriedade. No entanto, em muitos casos, recomenda-se o uso do método de Newton-Raphson modificado, que consiste em usar uma matriz de rigidez tangente aproximada e mantida constante. Porém, o uso desta matriz de rigidez é inadequado para o cálculo da sensibilidade. O programa ATENAS©, usado como base para este trabalho, emprega
uma matriz de rigidez tangente aproximada, sendo necessário aqui desenvolver o equacionamento para a obtenção da matriz tangente exata. O desenvolvimento é apresentado no presente capítulo.
O elemento finito estrutural de barra apresentado na figura 3.1 possui dois nós. São definidos um sistema de referência Global XY (fixo), um sistema de referência local xy e uma
coordenada paramétrica ξ.
Figura 3.1 – Elemento finito de barra.
Para elementos finitos de treliça (unidimensionais), a coordenada local de qualquer ponto do elemento é obtida através de uma interpolação linear das coordenadas nodais, ou seja
1
e
X X2e
1
e Y
2
e
Y ξ
X Y
1
ξ =
1
ξ = −
x
y
1l 0 l
x =x =
2l l
( )
( )
( )
1 1 1 1 2 2 2 20 0 0 0
l
l l
x
y
z
x N N
x
y
z
ξ ξ ξ
= =
N x (3.1)
onde N1
( )
ξ e N2( )
ξ são as funções de interpolação lineares dadas por( )
11 2
N ξ = −ξ (3.2)
( )
21 2
N ξ = +ξ (3.3)
Também o deslocamento ul de um ponto qualquer do elemento, no sistema de referência
local, pode ser escrito utilizando as mesmas funções de interpolação lineares, ou seja
( )
( )
( )
1 1 1 1 2 2 2 20 0 0 0
l
l l
u
v
w
u N N
u
v
w
ξ ξ ξ
= =
N u (3.4)
Nota-se que a notação ul sem negrito refere-se à função deslocamento enquanto ul representa o vetor de deslocamentos nodais do elemento. A relação entre a deformação e o deslocamento é dada por
sendo o Jacobiano representado por J
2
l
dx L
dξ
= = . Note-se que a deformação é definida no sistema corrotacional de cada barra.
3.1. Princípio dos Trabalhos Virtuais
Seja um corpo sujeito a um conjunto de forças de volume e de superfície. Partindo de um estado de equilíbrio estático, a configuração do corpo é modificada se for aplicado um conjunto de deslocamentos muito pequenos cinematicamente admissíveis, designados deslocamentos virtuais. O princípio dos trabalhos virtuais estabelece que o trabalho realizado pela integral das tensões internas sobre a deformação virtual de cada ponto do corpo é igual ao trabalho realizado pelas forças exteriores nos deslocamentos virtuais dos seus pontos de aplicação. Desta forma, para um elemento de barra, que está sujeito apenas a forças e deslocamentos axiais, o princípio dos trabalhos virtuais é escrito com base no tensor deformação de engenharia rotacionado como
( )
( )
( )
int T
T T
E E
W W
W ε σ V .
ext
e e
l l d o l
δ δ
δ = δu f =
∫
δ = δu p (3.6)Nessa expressão o símbolo δ representa “virtual”, de forma que Wδ equivale ao
trabalho virtual gerado pelo deslocamento virtual δul. O vetor fl representa a força interna
nodal no sistema de referência local, δεE é uma perturbação virtual do tensor deformação de
engenharia rotacionado e σE representa a componente axial do tensor tensão de engenharia
rotacionado. A discretização da equação 3.6 usando as funções de interpolação 3.2 e 3.3 é apresentada abaixo para a formulação linear e não-linear.
3.2. Formulação Linear
Nesta seção será desenvolvida a equação de equilíbrio do método dos elementos finitos utilizando o princípio dos trabalhos virtuais, de acordo com Boeraeve (2010). A densidade de energia de deformação U em um ponto de um material linear-elástico para um estado de
1
U εσ
2
e = (3.7)
A energia de deformação total W , integrada no volume V do elemento de barra é escrito int
como
int V
1
W εσ V
2
e
d
=
∫
(3.8)sendo σ ε
e
= Ε constante ao longo de toda a seção Ae da barra e V Ad = edx. A relação entre
a coordenada local xl e a coordenada parametrizada ξ pode ser expressa como
J dxl
dξ
= (3.9)
onde J é o Jacobiano da transformação. Desta forma, reescrevendo a energia interna tem-se,
1 int
V 1
1 1
W ε σ V εE εA J
2 2
e
e e
d dξ
+
−
=
∫
=∫
(3.10)O tensor deformação é obtido substituindo a equação 3.4 na equação 3.5, ou seja
( )
(
( )
)
( )
ε l
l l l
l l
d d d
x
dx d dx
ξ ξ ξ
ξ
= = =
b
N u N
u bu (3.11)
sendo 1
[
1 0 0 1 0 0]
L
= −
b . As forças externas podem ser separadas em forças de
corpo P (por unidade de volume) e forças de superfície V P (por unidade de área). No caso de S
barras as forças de corpo são dadas por unidade de comprimento e as forças de superfície
degeneram-se para forças concentradas nos nós (Pe). Desta forma o trabalho das forças
T V
We P A
ext o l l l e
L
u dx
=
∫
+u P (3.12)De acordo com o princípio dos trabalhos virtuais
int
We We
ext
δ =δ (3.13)
com
[
]
1 1
int
1 1
1
W ε ε ε ε A J ε εA J
2
e
e e o d e o d
δ + δ δ ξ + δ ξ
− −
=
∫
Ε + Ε =∫
Ε (3.14)e
1
T V
1
We P A J
ext ul o d l e
δ + δ ξ δ
−
=
∫
+ u P (3.15)Usando a relação δul =N
( )
ξ δul a expressão 3.15 fica( )
1T V
1
We P A J
ext l o d l e
δ + ξ δ ξ δ
−
=
∫
N u + u P (3.16)ou
( )
1T T
V 1
We P A J
ext l o d e
δ δ + ξ ξ
−
= +
∫
u N P (3.17)
Igualando as expressões 3.14 e 3.17, obtém-se
( )
1 1
T T
V
1 1
ε εA J P A J
e o d l o d e
δ ξ δ ξ ξ
+ +
− −
Ε = +
e substituindo a expressão de ε encontrada na equação 3.11
(
)
( )
1 1
T T T
V
1 1
A J P A J
l e l o d l o d e
δ ξ δ ξ ξ
+ +
− −
Ε = +
∫
b u bu u∫
N P (3.19)ou, rearranjando T l δu 1 T T 1 A J
e o dξ l δ l
+
−
Ε =
∫
b b u u( )
1
T V 1
P ξ A Jo dξ e
+
−
+
∫
N P (3.20)A expressão 3.20 pode ser escrita como
e l = e
k u p (3.21)
onde, ke representa a matriz de rigidez do elemento de barra dada por
1
T 1
1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
E A
A J
1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
e o
e e o d
L ξ + − −
= Ε =
−
∫
k b b (3.22a)
A equação 3.22a pode ser escrita observando que para elementos de barra só há componentes de tensão e deformação na direção axial, ou seja
1 1 E A 1 1 e o e L − = − k (3.22b)
O vetor pe representa o carregamento total no elemento, no qual estão incluídas as
1
nel e e=
=
∧
K k e1
nel e e=
=
∧
p p (3.23)
e a equação de equilíbrio pode ser escrita como
=
K u p (2.24)
onde
∧
representa o operador montagem que mapeia as variáveis da configuração local para a global, u representa o vetor deslocamento nodal no sistema de coordenadas globais e p o vetor carregamento nodal de toda a estrutura.3.3. Formulação Não-Linear Geométrica
Na formulação não-linear, em cada passo de carga n procura-se minimizar o resíduo Rn
da diferença entre o carregamento externo e a força interna ( )f un , ou seja,
( )
( )n n n
µ p s −f u =R ≈0 (3.25a)
A equação 3.25a pode ser linearizada utilizando uma expansão por série de Taylor truncada em termos de primeira ordem ao redor da configuração corrente n
α
uɶ obtendo
( )
(
)
( )
n( )
nn n n n n n n n
n α
α = α−1+ ∆ ≈ α−1 +∂ −1 ∆
∂ R u
R u R u u R u u
u ɶ
ɶ ɶ ɶ (3.25b)
De acordo com a equação 3.25b, para encontrar o valor de ∆un é necessário avaliar a
3.3.1. Vetor Força Interna
A fim de se obter uma expressão para a força interna no elemento, utiliza-se a equação 3.5. A componente axial do tensor deformação de engenharia rotacionado é escrita como
E
ε l l
l
dx dX
dX −
= (3.25c)
Na equação 3.25c Xl equivale a uma coordenada local representada no sistema de
referência corrotacional, sendo dxl e dXl são dados por
l l
dx
dx d
dξ ξ
= (3.26)
l l
dX
dX d
dξ ξ
= (3.27)
Nessas expressões dxl /dξ representa o Jacobiano da transformação, ou seja
( )
Jl l
dx = x dξ (3.28)
( )
Jl l
dX = X dξ (3.29)
Reescrevendo o tensor deformação de engenharia rotacionado utilizando as expressões 3.28 e 3.29, tem-se
( ) ( )
( )
EJ J
ε
J
l l
l
x X
X −
= (3.30)
O Jacobiano, definido por dxl /dξ, pode ser representado utilizando o método dos
( )
(
( )
)
J l l
l d dx x d d ξ ξ ξ
= = N x (3.31)
( )
( )
( )
1 1 1 1 2 2 2 2J 0 0 0 0
l l x y z dN dN x x d d y z ξ ξ ξ ξ = (3.32)
As derivadas das funções de interpolação (dadas pelas equações 3.2 e 3.3) são
( )
1 1 2 dN d ξξ = − (3.33)
( )
2 1 2 dN d ξξ = (3.34)
e o Jacobiano pode ser escrito como
( )
[
]
1 1 1 2 2 2 1J 1 0 0 1 0 0
2 l l x y z x x y z = − (3.35) ou
( )
2 1J
2 2
l l
l
x x L
x = − = (3.36)
l l l
x = X +u (3.37)
Esta posição inicial também pode ser representada utilizando as mesmas funções de interpolação lineares, ou seja,
( )
( )
1 1 1 1 2 2 2 20 0 0 0
l
l
X
Y
Z
X N N
X Y Z ξ ξ = (3.38)
e a equação 3.37 é reescrita como
1 1 1
1 1 1
1 1 1
2 2 2
2 2 2
2 2 2
l l
X u
x
y Y v
z Z w
x X u
y Y v
z Z w
+ + + = + + + (3.39)
Ao realizar uma perturbação no deslocamento nodal ul o tensor deformação sofre uma
perturbação virtual dada por
( ) ( )
( )
E J J ε J l l l l l x X u u Xδ = ∂ − δ
∂ (3.40)
Nessa expressão apenas J
( )
xl é uma função do deslocamento nodal ul, então( )
( )
E J 1 ε J l l l l x u X uδ = ∂ δ
∂ (3.41)
( )
[
]
1 1 1 1 1 1 2 2 2 2 2 2 J 11 0 0 1 0 0 2 l l l l X u Y v
x Z w
X u Y v Z w + + ∂ = − ∂ + ∂ ∂ + + +
u u (3.42)
( )
[
]
1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0
J 1
1 0 0 1 0 0
0 0 0 1 0 0 2
0 0 0 0 1 0 0 0 0 0 0 1
l l x ∂ = − ∂ u (3.43)
( )
[
]
J 11 0 0 1 0 0 2 l l x ∂ = −
∂u (3.44)
Substituindo esta derivada na equação 3.32, obtém-se a expressão da deformação virtual
( )
[
]
*
* E
1
ε 1 0 0 1 0 0
2 J l l
l X
δ = − δ = δ
B
u B u (3.45)
Nota-se que na prática B* é igual a b, definido na seção 3.2. Aplicando agora o princípio
dos trabalhos virtuais dado pela equação 3.6,
( )
T(
*)
T( )
Eσ J A
l l l Xl od
δu f =
∫
B uδ ξ (3.46)( )
*TE
σ J A
l =
∫
Xl odξf B (3.47)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
1 1 1
1 2 3
1
2 2 2
1 2 3
3 3 3
1 2 3
T
1 1 1
2
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
0 0 0 f
0 0 0 0
0 0 0 0
f
0 0 0
0
0 0 0
0
0 0 0
l x
l
x
c c c
c c c
c c c
c c c
c c c
c c c
= =
f T f (3.48)
onde ( )j i
c representam os cossenos diretores, ou seja, o cosseno formado entre o eixo i do
sistema de referência local e o eixo j do sistema de referência global. Como em um elemento
de barra existe força interna nodal apenas na direção axial da barra, o seu vetor força interna local possui apenas dois componentes, fx1 e fx2. Isso possibilita eliminar as colunas 2, 3, 5 e 6 da matriz de rotação
( ) ( ) ( ) ( ) ( ) ( ) 1 1 1 2 1 3 1 T 1 2 1 2 1 3 1
0 0 0 0 0 f
0 0 0 0 0 0
0 0 0 0 0 0
f
0 0 0 0 0
0
0 0 0 0 0
0
0 0 0 0 0
l x l x c c c c c c = =
f T f (3.49)
3.3.2. Matriz de Rigidez Tangente
A matriz de rigidez tangente do elemento é calculada derivando o vetor força interna em relação ao vetor deslocamento no sistema de referência global, ou seja
( )
TT l
∂ ∂
= =
∂ ∂
f
k T f
u u (3.50)
T1 T2 T
T
T l l
∂ ∂
= +
∂ ∂
k k
f T
k f T
u u (3.51)
De acordo com a equação 3.51, a matriz de rigidez tangente é separada em dois termos, kT1 e T2
k . Para uma estrutura modelada com elementos de treliça, após encontrar a matriz de rigidez de todos os elementos, monta-se a matriz de rigidez tangente global,
(
)
T 1 T 1 T1 T2
nel nel e= e=
=
∧
=∧
+K k k k (3.52)
3.3.2.1. Expressão da Matriz k T2
O segundo termo da matriz de rigidez tangente é dado pela expressão
T T
T2 l l l
l
∂ ∂ ∂
= =
∂ ∂ ∂
T
f f u
k T T
u u u (3.53)
Derivando a expressão da força interna local dada pela equação 3.47 com relação ao deslocamento nodal ul,
( )
1*T E 1
σ
J A
l
l o
l l
X dξ
−
∂ = ∂
∂
∫
∂f
B
u u (3.54)
ou
( )
*1
*T E E E 1
E
σ ε
J A
ε
l
l o
l l
X dξ
−
∂ = ∂ ∂
∂
∫
∂ ∂B
f
B
u u (3.55)
( )
T 2 1T *T * T2
1
E J A
l
l o
X dξ
+
−
=
∫
k
k T B B T (3.56)
ou
T
T2 T2
l =
k T k T (3.57)
3.3.2.2. Expressão da Matriz k T1
O primeiro termo da matriz de rigidez tangente é dado pela expressão
T T1 l ∂ = ∂ T k f u (3.58)
A partir da expressão do vetor força interna local, dado por
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( )
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3 1
1 2 3
T *T
E 0
1 1 1
1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
0 0 0
0 0 0
0 0 0
σ J A
0 0 0
0 0 0
0 0 0
l l
c c c
c c c
c c c
X d
c c c
c c c
c c c
ξ + − = =
∫
f T f B (3.59)
( ) (1) (1) (1) 3 1 2 (2) (2) (2) 3 1 2 (3) (3) (3) 3 1 2 T
2 (2) (2) 3 1 2 (2) (2) (2) 3 1 2 (3) (3) (3) 3 1 2
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
l c c c c c c c c c c c c c c c c c c ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
u u u
u u u
T f u u u
u
u u u
u u u
u u u
( )
( )
1 E 1 1 00 σ J A
1 2J 0 0 l o l X d X ξ + − −
∫
(3.60)Efetuando a multiplicação entre a matriz e o vetor, resulta
(1) 1 (2) 1 (3) 1 1 T E (1) 1 1 (2) 1 (3) 1 σ A 2 o l c c c d c c c ξ + − ∂ − ∂ ∂ − ∂ ∂ − ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂
∫
u uT f u
u
u
u
u
(3.61)
Esta equação pode ser reescrita como
( ) T
(1) 1 1 (2) T E 1 1 (3) 1 2J
1 0 0
0 1 0
0 0 1 σ A
1 0 0 2
0 1 0
0 0 1
onde
( )
1 0 0 1 0 0
1
0 1 0 0 1 0
2J
0 0 1 0 0 1
l
X
−
= −
−
B (3.63)
Reescrevendo a equação 3.62, tem-se
( )
1T
T 1 E 1
A 2 J
2
o
l Xl d
σ ξ
+
−
∂
∂ =
∂ ∂
∫
c
T f B
u u (3.64)
onde o vetor c1, é o vetor dos cossenos diretores entre os eixos x, y, z do sistema de referência
local e o eixo X do sistema de referência global, ou seja
(
) (
)
( )
( )
2 1 2 1 21 21
1
2J xl 2J xl
− + − +
= X X u u = X u
c (3.65)
sendo X1 o vetor das coordenadas do nó 1 no sistema de referência global, X2 o vetor das
coordenadas do nó 2 no sistema de referência global, u1 o vetor deslocamento do nó 1 no
sistema de referência global e u2 o vetor deslocamento do nó 2 no sistema de referência
global. Derivando o vetor c1 em relação ao deslocamento nodal u e fazendo as
simplificações, tem-se
( )
( )
( )
1 1 21 1 J
2J J
l
l l
x
x x
∂
∂ = ∂ −
∂ ∂ ∂
c u c
u u u (3.66)
e a derivada ∂J
( )
xl( )
[
]
1 1 1 1 1 1 2 2 T 2 2 2 2 J 11 0 0 1 0 0 2 l l l l X u Y v
x Z w
X u Y v Z w + + ∂ ∂ + ∂ = − ∂ ∂ + ∂ + + u
u u u (3.67)
que pode ser escrita como
( )
[
]
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
J
0 0 0
1 0 0 0 0 0
0 0 0
0 1 0 0 0 0
0 0 0
0 0 1 0 0 0 1
1 0 0 1 0 0
0 0 0 1 0 0
2 0 0 0
0 0 0 0 1 0 0 0 0
0 0 0 0 0 1
0 0 0
l x
c c c
c c c
c c c
c c c
c c c
c c c
∂ = ∂ = − u (3.68) ou
( )
(1) (2) (3) (1) (2) (3)1 1 1 1 1 1
J 1
2
l
x
c c c c c c
∂
= − − −
∂u (3.69)
( )
( )
21( )
21( )
21( )
21( )
21( )
21J 1
2 2J 2J 2J 2J 2J 2J
l
l l l l l l
x x y z x y z
x x x x x x
∂
= − − −
∂u (3.70)
sendo
(
)
21 2 1 ( 2 1)
x = x −x + u −u (3.71)
(
) (
)
21 2 1 2 1
(
) (
)
21 2 1 2 1
z = z −z + w −w (3.73)
( )
( )
[
21 21 21 21 21 21]
J 1
4J
l
l x
x y z x y z
x ∂
= − − −
∂u (3.74)
A matriz que aparece na equação 3.74 pode ser representada por 4J
( )
2 T Tl l
X x B B, onde
1 1 1 1 1 1 2 2 3 3 3 3 X u Y v Z w X u Y v Z w + + + = + + + x (3.75)
Substituindo na equação 3.74
( ) ( )
( )
2 T TJ J J l l l x X x ∂ = ∂
x B B
u (3.76)
Agora reescrevendo a expressão da derivada ∂c1/∂u dada pela equação 3.66,
( )
( )
( )
( )
2 T T1 1 21 1 J
2J J J
l
l l l
X
x x x
∂ = ∂ −
∂ ∂
x B B
c u c
u u (3.77)
A derivada ∂ 21
∂ u
u é dada por
[
]
T21
2 1 2 1 2 1
u u v v w w
∂ = ∂ − − −
∂ ∂
u
u u (3.78)
( )
211 0 0 1 0 0
0 1 0 0 1 0 2J
0 0 1 0 0 1
Substituindo na equação 3.77 e simplificando,
( )
( )
( )
( )
T T 1 1 J J J J l l l l X X x x ∂ = − ∂ cB c x B B
u (3.80)
Utilizando as equações 3.63 e 3.65, o termo c1 pode ser escrito como
( )
( )
1 J J l l X x =c B x (3.81)
e a equação 3.80 é reescrita como
( )
( )
( )
( )
2T T
1 J J
J J l l l l X X x x ∂ = − ∂
c B B x x B B
u (3.82)
Substituindo a expressão de ∂ 1
∂
c
p na equação 3.64,
( )
( )
( )
( )
( )
2 1
T
T T T E
T1
1
J J σ A
2 J
J J 2
l l o
l l
l l
X X
X d
x x ξ
+ − ∂ = = − ∂
∫
Tf k B B B x x B B
u (3.83)
Após algumas simplificações a equação 3.83 é escrita como
[ ]
( )
( )
( )
1 T T1 E 1 Jσ A J
J
l
o a l
l X X d x ξ + − =
∫
k B H B (3.84)
sendo a matriz Ha igual a
( )
( )
T TJ Xl
= −
Após obter kT para todos os elementos, monta-se a matriz de rigidez tangente global como
T 1 T
nel e e=
=
∧
K k (3.86)
lembrando que kTe =kT1e +kT 2e .
3.4. Métodos de Solução
Problemas com algum tipo de não linearidade são resolvidos através de algum método iterativo-incremental. A escolha do método a ser utilizado leva em consideração suas características de estabilidade, precisão e eficiência. Um dos métodos iterativos mais antigos é
o Método de Newton Raphson e é ainda bastante utilizado na solução de problemas não
lineares. Também é conhecido como Método do Controle por Carregamento, visto que todo o
processo é caracterizado por um aumento constante no carregamento aplicado. Caracteriza-se por falhar em casos onde a matriz de rigidez apresenta singularidades e também em casos de ocorrência de pontos limites na curva carregamento-deslocamento. Nestas situações outros métodos são mais apropriados, como por exemplo, o Método do Controle por Deslocamentos
Generalizados [Yang e Shieh, 1990], [Kuo e Yang, 1995]. Pode-se citar ainda como métodos comumente utilizados o Método do Comprimento de Arco e o Método do controle por
trabalho [Yang e Kuo, 1994]. A seguir são apresentados os métodos que estão implementados
no software utilizado neste trabalho (ATENAS©).
3.4.1. Método de Newton-Raphson
De acordo com Choi e Kin, 2005, a maioria dos métodos iterativos utilizados para solução de equações não lineares pode ser considerado como uma variação do método de Newton-Raphson. É realizado um incremento de carga apenas na primeira iteração do método, ou seja, para j=1 e esse carregamento se mantém durante o processo iterativo. Para as iterações
seguintes, portanto j≥2, o incremento de carga é igual a zero, o que implica que o
conhecido como Método do Controle por Carregamento. Utilizando um fator de
carregamento λj, pode-se escrever
constante se 1
0 se 2
j
j
j
λ = =
≥
(3.87)
Um esquema do processo de iteração para o método de Newton-Raphson pode ser observado na figura 3.2.
Figura 3.2 – Método de Newton-Raphson [Yang e Kuo, 1994]
A matriz de rigidez é atualizada em cada iteração j, um deslocamento ∆uij é então
calculado, sendo que o deslocamento total para o incremento de carga ∆pi é dado pela soma
dos deslocamentos de todas as iterações. Na figura 3.3 observa-se um caso em que o método de Newton-Raphson não converge. Neste caso o incremento de carga ultrapassa o ponto limite, sendo que a linha horizontal que representa o carregamento aplicado não cruza a curva carregamento-deslocamento.
C
a
rr
eg
.
Desloc.
i
p
1 i−
p
i ∆p
1 i−
u 1
i
u u2i
1 i
∆u 2i ∆u
0 i
K
1 i
Figura 3.3 – Divergência no método de Newton-Raphson [Yang e Kuo, 1994]
3.4.2. Método do Controle por Deslocamentos Generalizado
No método do Controle por Deslocamentos Generalizados o fator de incremento de carga de cada passo iterativo é considerado como uma variável incógnita adicional [Muñoz-Rojas e Duarte, 2001]. Supondo um carregamento proporcional, ou seja,
( )
1 1
2 2
p p
p p
pn pn
λ λ λ
∗ ∗
∗
∗
= = =
p p
⋮ ⋮ (3.88)
A equação de equilíbrio para o incremento i , pode ser escrita como
1 1
i i i i
j j λj j
∗ −∆ = ∆ + −
K u p R (3.89)
sendo que p∗ é o vetor de cargas nodais de referência, i j λ
∆ define o incremento do fator de carga no incremento e i 1
j−
R representa o vetor das forças desequilibradas na iteração j-1
(resíduo), dado por:
1 1 1
i i i
j λj j
∗ − = − − −
R p f (3.90)
C
a
rr
eg
.
Desloc.
i
p
1 i−
sendo i 1 j
λ − o fator de carga na iteração j-1 e 1
i j−
f o vetor das forças internas para essa mesma iteração. O vetor incremento de deslocamento pode ser expresso pela seguinte soma de vetores:
1 2
i i i i
j λj j j
∆ = ∆u u +u (3.91)
e os vetores 1i j
u e i2 j
u são obtidos solucionando os seguintes sistemas de equações:
1 1
i i j− j =
K u p (3.92)
1 2 1
i i i
j− j = j−
K u R (3.93)
Para obter o primeiro incremento do fator de carga na primeira iteração do i-ésimo passo
incremental, usa-se um parâmetro conhecido como GSP (“General Stiffness Parameter”),
definido por:
( )
( )
( )
( )
1 1 1 1 1 1
1 1 1 1 1
T
i i
T
GSP= u − u
u u (3.94)
e o incremento de fator de carga na primeira iteração do passo i, é calculada através da
seguinte expressão
(
)
1/2 11 1
i
GSP
λ λ
∆ = ±∆ (3.95)
sendo 1 1
λ
∆ o incremento inicial do fator de carga (primeiro passo e primeira iteração). Para as iterações seguintes ( j≥2) utiliza-se a seguinte expressão para o cálculo do incremento do
fator de carga
( )
1( )
1 1 2
i i
T
j i
λ
−
Na equação 3.96 quando i=1,
( )
u1 1T i−1 é considerado igual a( )
u1 1T 1. A figura 3.4 mostra um esquema do processo iterativo do método do controle por deslocamentos.Figura 3.4 – Método do controle por deslocamentos [Yang e Kuo, 1994]. Desloc.
i
p
1 i−
p
1 i
λ ∗ ∆ p
1 i
j −
u 1
i
u
1 i ∆u
2 i ∆u
2 i
λ ∗ ∆ p
C
a
rr
eg
![Figura 3.2 – Método de Newton-Raphson [Yang e Kuo, 1994]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16997424.764158/43.892.281.643.426.705/figura-método-de-newton-raphson-yang-e-kuo.webp)
![Figura 3.4 – Método do controle por deslocamentos [Yang e Kuo, 1994].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16997424.764158/46.892.280.647.255.528/figura-método-do-controle-por-deslocamentos-yang-kuo.webp)
![Figura 4.3 – Erro no método das diferenças finitas modificado [Muñoz-Rojas et al., 2004]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16997424.764158/64.892.149.783.418.635/figura-erro-método-diferenças-finitas-modificado-muñoz-rojas.webp)