Introdução à Pesquisa Operacional
2
Introdução à Pesquisa Operacional
Descrição:
Técnicas e métodos matemáticos empregados para
auxiliar a tomada de decisões em sistemas organizacionais.
Emprego:
Problemas que necessitam da especificação
quantitativa da forma de execução de operações e atividades.
Objetivo:
Identificação da melhor solução possível (solução
Características Gerais
Maximização ou minimização de uma função
numérica.
Problema de Programação Linear (PPL):
Alocação ótima de recursos para atender a um
objetivo.
Recursos expressos por variáveis.
Existência de restrições aos valores possíveis
para os recursos.
Relações entre variáveis → funções lineares
Descrição Matemática
Conjunto de m restrições lineares (=, <=, >=)
em n variáveis.
Expressão:
Restrições ai1x1 + ai2x2 + … + ainxn {=, <=, >=} bi,
i = 1,..,m
Variáveis xj >= 0, j = 1,..,n
Método Gráfico
1)
Determinar a região de viabilidade
1) Restrições como igualdades
2) Identificar, mediante teste, o semi-plano
correspondente
Calcular o vetor gradiente grad(z)
1) Calcular as derivadas parciais em relação a cada
variável
Método Gráfico
3)
Deslocar a reta-objetivo no sentido de grad(z)
para maximização (ou -grad(z) para
minimização), até encontrar o ponto da região
de viabilidade que satisfaz ao problema.
4)
Determinar as coordenadas do ponto como a
10
Solução Gráfica: Construindo o conjunto de possibilidades
Conjunto
de Possibilidades
12
2
x
1
2
x
Solução Gráfica: Definindo as Curvas de Nível do Objetivo
L
x
x
L
x
x
+
=
⇒
=
−
+
1 2
2
1
4
4
Para cada valor de L tem-se uma reta no plano (x2
vs x1).
Dado um valor de L é possível traçar um lugar
geométrico (uma reta) onde as várias
12
Solução Gráfica: Desenhando as Curvas de Nível do Objetivo
1
x
2
x
0
5
=
L
7
=
L
9
=
L
Solução Gráfica: Reunindo os componentes e resolvendo
Conjunto
de Possibilidades
12
2
x
13
=
L
A solução
Que características permitiram a solução?
O conjunto de possibilidades era convexo.
Um conjunto é convexo quando toda
combinação convexa de dois elementos dele pertence a ele.
Uma combinação convexa de dois elementos,
x e y é um terceiro elemento z tal que: z=a.x+(1-a).y onde 0 ≤ a ≤ 1.
É possível definir combinação convexa de n
Valores p/ Restrição 1
Casos onde a solução não existe
Conjunto de Possibilidades é vazio
Não há solução compatível
Exemplo:
2
x
16
Conjunto de Possibilidades
Casos onde a solução não existe
A solução é ilimitada
Caso de Infinitas Soluções
Conjunto
de Possibilidades
2
x
Qualquer um desses pontos é uma soluçãoAs soluções são
combinações lineares dos pontos
extremos
Método Simplex
Forma:
– z = Min{c
1x1 + c2x2 + … + cnxn},
s.a ∑aijxj = bi, j = 1...n, i = 1...m,
bi>= 0,
● x
O Método Simplex
1)
Selecione para entrada na base a variável
não-básica com custo relativo que melhore o
valor da função objetivo. Se não houver, a
solução já é ótima.
2)
Selecione para saída da base a variável
básica com menor valor da razão b
j/a
i j, com a
ij
> 0. Se não houver a
i j> 0, o PPL tem
solução ilimitada.
Forma Canônica
Existe uma submatriz identidade de ordem m
→ as variáveis associadas compõem uma
solução viável básica
(SVB).
As variáveis são divididas em dois grupos:
Variáveis básicas (ou dependentes)
Variáveis não básicas (ou independentes)
Premissas:
Valores iniciais das variáveis não básicas: 0
Valores iniciais das variáveis básicas: o valor da
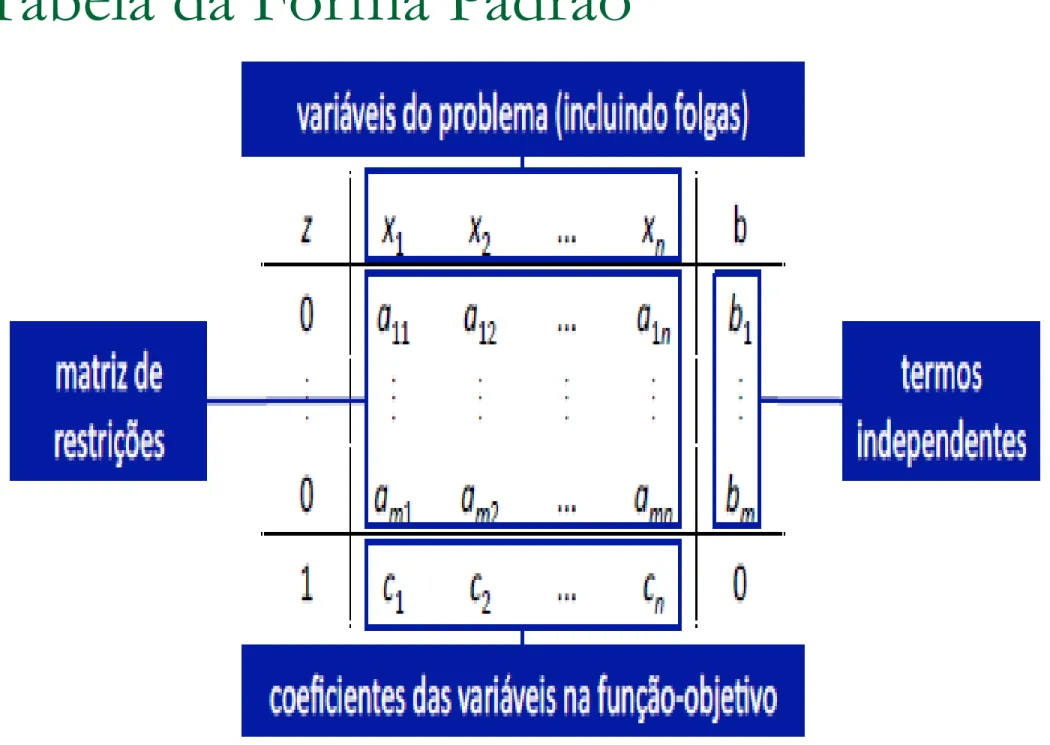
Modelo Padrão
Todo modelo de programação linear pode ser posto na forma padrão que não é limitativa.
Um problema de minimização, por exemplo, pode ser resolvido pela maximização do negativo da
função objetivo.
Restrições de ≥ podem ser multiplicadas por -1 para se tornarem restrições padrão.
Variáveis que possam assumir qualquer valor e não apenas valores positivos podem ser
Técnica de Resolução
Passo 1: Introduzir as variáveis de folga; uma para cada
desigualdade.
Passo 2: Montar um quadro para os cálculos, colocando os
coeficientes de todas as variáveis com os respectivos sinais e, na última linha, incluir os coeficientes da função objetivo transformada.
Passo 3: Estabelecer uma solução básica inicial, usualmente
Técnica de Resolução
Passo 4: Como próxima variável a entrar na base, escolher
a variável não básica que oferece, na última linha, a maior contribuição para o aumento da função objetivo (ou seja, tem o maior valor negativo).
Se todas as variáveis que estão fora da base tiverem
coeficientes nulos ou positivos nesta linha, a solução atual é ótima.
Se alguma dessas variáveis tiver coeficiente nulo, isto
significa que ela pode ser introduzida na base sem
26
Técnica de Resolução
Passo 5: Para escolher a variável que deve deixar a base,
deve-se realizar o seguinte procedimento:
a) Dividir os elementos da última coluna pelos
correspondentes elementos positivos da coluna da variável que vai entrar na base. Caso não haja elemento algum
positivo nesta coluna, o processo deve parar, já que a solução seria ilimitada.
b) O menor quociente indica a equação cuja respectiva
variável básica deverá ser anulada, tornando-se variável não básica.
Passo 6: Usando operações válidas com as linhas da matriz,
transformar o quadro de cálculos de forma a encontrar a nova solução básica. A coluna da nova variável básica deverá se tornar um vetor identidade, onde o elemento 1 aparece na linha correspondente à variável que está sendo anulada.
Operação na Tabela Canônica
Problema Dual
"A cada modelo de programação linear,
contendo coeficientes a
ij
, b
ie c
j, corresponde
um outro modelo, denominado Dual, formado
por esses mesmos coeficientes, porém
Exemplos
1) PRIMAL Max L = 4 x
1 +x2
s. a 9x
1 + x2 ≤ 18
3x
1 +x2 ≤ 12
x
1 e x2 ≥ 0
DUAL Min D = 18y1 +12y2 s. a 9y
1 + 3y2 ≥ 4
y1 +y2 ≥ 1
y
1 e y2 ≥ 0
2) PRIMAL
Max P = 5 x1 + 2x2
s. a x
1 ≤ 3 y1 x2 ≤ 4 y
2
x
1 + 2x2 ≤ 9 y3
DUAL Min D = 3y
1 + 4y2 + 9y3
s.a. y
1 + y3 ≥ 5 y
•
“Processo de elaboração de um
modelo
de um
sistema
real (ou hipotético) e a
condução de experimentos
com a
finalidade de
entender
o comportamento
de um sistema ou
avaliar
sua operação”
•
(Shannon, 1975)
•
“O princípio básico é simples. Analistas
constroem
modelos do sistema
de interesse,
escrevem programas
destes modelos e utilizam
um computador para inicializar o comportamento
do sistema e submetê-lo a diversas políticas
operacionais. A melhor política
deve ser
selecionada.
”
•
(Pidd, 2000)
Captura o comportamento do
sistema real
Permite a análise pela pergunta:
●
“E se...?”
Capaz de representar
sistemas complexos
de
natureza
dinâmica e aleatória
Limitações:
– Podem ser de construção difícil
– Não há garantia do ótimo
Sistemas
dinâmicos
: os estados se
alteram com o tempo
Sistemas
discretos
: os atributos dos
estados só mudam no tempo discreto
Determinística
ou
Estocástica
Analisar um novo sistema antes de sua implantação
Melhorar a operação de um sistema já existente
Compreender melhor o funcionamento de um sistema
Melhorar a comunicação vertical entre o pessoal de
operação
Confrontar resultados
Medir eficiências
Quando Simular?
Problema Ferramentas Resultados
Planilhas
Calculadora
Lápis e Papel
Geração de Números Aleatórios
●
Métodos Congruentes
– A maioria dos métodos usados hoje em dia
são variações do chamado Método
Congruente Linear, cujos pontos básicos foram propostos por Lehmer em 1951. Neste método os números aleatórios,
44
Gerador de Números Aleatórios
● Na formula anterior, a é o termo multiplicativo, c é o termo
aditivo.
● Se c≠0, o gerador é chamado de misto (pouco usado na
atualidade porque os números gerados tendem a ter problemas para passar os testes de aleatoriedade).
● Se c = 0, o gerador é chamado de multiplicativo.
● Se a = 1, o gerador é chamado de aditivo.
● Um dos requisitos é que a sequência seja intuitivamente
aleatória. Então deve-se escolher as constantes a e m tais que:
– 1.A sequência seja intuitivamente uma amostra de
números uniformes[0,1)
– 2.Para uma semente, toda a sequência gerada se
Engenheiro de Produção
Jr
Março 2010
As técnicas de simulação são ferramentas muito utilizadas
na gestão de operações, entretanto, apresentam como
DESVANTAGEM
(A) a impossibilidade de testar cenários diferentes para um
mesmo problema operacional.
(B) a necessidade de interferência direta nos sistemas
reais, afetando as operações do dia a dia.
(C) a inadequação para estudar situações complexas do
mundo real com grande quantidade de variáveis.
(D) o uso de abordagens iterativas e de tentativa e erro que
Engenheiro de Produção
Junior
Edital 2008
Dentre as finalidades da simulação, destaca-se:
(A) descrever o comportamento de sistemas de forma
consistente e rápida.
(B) impedir que variáveis dinâmicas mudem de estado, o que
geraria um novo sistema.
(C) otimizar sistemas não convergentes.
(D) reproduzir o comportamento de qualquer tipo de sistema,
inclusive os não estruturáveis.
(E) simplificar variáveis em sistemas complexos, reduzindo a
(A) f(XN, XN-1, K, L) = K.XN + L, tem-se a congruência mista. (B) f(XN, XN-1, K, L) = K.XN / L, tem-se a congruência mista.
(C) f(XN, XN-1, K, L) = K.(XN + L), tem-se a congruência multiplicativa. (D) f(XN, XN-1, K, L) = K.XN + L.XN-1, tem-se a congruência mista.
Analista de Pesquisa Operacional 2010
As técnicas de simulação são muito importantes em uma grande variedade de projetos quando estes apresentam cálculos muito complexos ou experimentos reais muito dispendiosos. Na base da simulação, tem-se a necessidade de geração de números pseudoaleatórios, quando as duas principais preocupações são: (1) um possível número deve ter a mesma probabilidade de ocorrer que qualquer outro dentre os demais possíveis números e (2) deve existir independência entre as ocorrências, isto é, a probabilidade de ocorrência de um número não deve ser afetada pelas eventuais ocorrências dos demais possíveis números.
Um serviço de atendimento, que se inicia às 9 h, tem uma única fila
para atendimento por um único servidor. O intervalo (em minutos) entre a chegada de dois clientes é uma variável aleatória uniformemente distribuída entre 0 e 4, e o tempo (em minutos) de atendimento pelo servidor é uma variável aleatória distribuída uniformemente entre 5 e 10. No quadro a seguir, é apresentado o resultado de uma simulação com essas variáveis.
Por exemplo, o primeiro cliente chega às 9 h 2 min, é atendido
durante 5 min e, portanto, sai do sistema às 9 h 7 min. O segundo cliente chega 1 min após a chegada do primeiro cliente, e o servidor irá consumir 10 min em seu atendimento. O cliente que aguardará na fila mais tempo para ser atendido irá esperar
(A) 13 min (B) 14 min (C) 15 min (D) 16 min (E) 17 min
Analista de PO 2010
CLIENTE INTERVALO ATENDIMENTO
1 2 5
2 1 10
3 1 6
Definições
●
Teoria da Decisão
–
Estudo dos paradigmas subjacentes à
decisão e seus fundamentos analíticos.
●
Decisão
–
Processo que leva, direta ou
Tipos de Decisão
● Programadas ou Estruturadas
– Decisões adotadas para problemas bem
compreendidos, altamente estruturados, rotineiros, repetitivos e passíveis de adoção de procedimentos e regras sistemáticos.
– Ambiente usual: nível operacional.
● Não Programadas ou Não Estruturadas
– Decisões adotadas para problemas não bem
compreendidos, mal estruturados, singulares e
inadequados para adoção de procedimentos e regras sistemáticos.
Condicionantes da Decisão
●
decisão em condições de certeza
– ocorre quando há total conhecimento de todos
os estados da natureza do processo decisório.
●
decisão em condições de risco
– ocorre quando não são conhecidas as
Condicionantes da Decisão
● decisão em condições de incerteza ou em
condições de ignorância
– ocorre quando não se obtiveram informações e dados
sobre as circunstâncias do processo decisório ou em relação à parcela dessa situação.
● decisão em condições de competição ou em
condições de conflito
– ocorre quando a estratégia e a situação em si do
Situações de
Método de Daft para
Modelo Racional
●
Monitoramento do ambiente de decisão
●Definição do problema
●
Especificação dos objetivos da decisão
●Diagnóstico do problema
●
Desenvolvimento de soluções alternativas
●Avaliação das alternativas
●
Escolha da melhor alternativa
56
Modelos de Tomada de Decisão
●
Racionalidade Limitada – Método de
Simon:
– Ambiente restrito em informações e capacidades de
processamento.
– Construção de modelos simplificados → Limitação
da Racionalidade.
– Participação racional e consciente, em ambiente
com alternativas parcialmente racionais, em virtude da seleção de critérios de avaliação.
– Decisões satisfatórias, mas não ótimas.
– Processos de decisão intuitivos, com emprego de
Teoria dos Jogos
Componentes Básicos
É composto de:
jogadores (N): aqueles que tomam decisões
estratégias (Ci): possível ação do jogador
funções de utilidade (ui): retorno auferido pelo jogador
quando o conjunto de jogadores emprega a estratégia C = {Ci}iЄN
G = ( N,{C
i}
iЄN,{U
i(C)}
iЄN)
Teoria dos Jogos
Vantagens
Fiani
Entendimento teórico do processo de decisão de agentes
que interagem, a partir da compreensão da lógica da situação na qual se encontram
Desenvolvimento da capacidade de raciocinar
estrategicamente, explorando todas as possibilidades de interação (inclusive as não-intuitivas)
Habilidade para descrever não só atores individuais e
Teoria dos Jogos
Representação Matricial
• Combinação de estratégias determina o retorno de
A B C
A (2, 2) (0, 0) (-2, -1)
B (-5, 1) (3, 4) (3, -1)
Jogador 1
Jogador 2
Retorno para
Jogador 1 Retorno para Jogador 2 Estratégias do
Jogador 1
Teoria dos Jogos
Dúvida
–
Como os jogadores vão se comportar
diante de determinado jogo, ou seja,
Teoria dos Jogos
Equilíbrio de Nash
–
Ponto em que nenhum jogador pode
aumentar seu retorno alterando,
unilateralmente, sua estratégia
Teoria dos Jogos
Teorema Geral do Equilíbrio (Nash,
1951)
–
Para todo jogo finito na forma
estratégica, existe ao menos um
equilíbrio de Nash,
puro
ou
misto
Teoria dos Jogos
Ótimo de Pareto
–
É um ponto tal que nenhum
jogador consegue aumentar seu
próprio retorno (mudando
unilateralmente de estratégia) sem
prejudicar algum outro jogador.
»
Medida de eficiência na
Teoria dos Jogos
Classificação
–
Muitas formas de classificação – exemplos:
Cooperativos x Não-Cooperativos
coalizões
Estáticos x Dinâmicos
adoção variável de estratégias e funções objetivo
Soma-Zero x Soma-Não Zero
Teoria dos Jogos
Jogos de Soma-Zero
Caso abordado nos trabalhos iniciais
Situações em que dois indivíduos estão
em oposição pura entre si, ou seja, o
ganho de um jogador
é sempre
a perda do
outro
.
Solução intuitiva
Única, com a maximização do retorno para
cada jogador
Teoria dos Jogos
Dominância
L M R
T -2 -1 4
B 3 2 3
Jogador 1
Jogador 2
Existência de estratégia E1 para a qual o retorno é
Teoria dos Jogos
Ponto de Sela
A
B
D
A
12
-1
0
C
5
2
3
D
-16
0
-1
Jogador 1
Jogador 2
Um resultado é um ponto de sela se for, ao
mesmo tempo, menor ou igual a qualquer valor de sua linha e maior ou igual que qualquer valor em
Teoria dos Jogos
Jogo Estratégico Misto
Γ
= ( N,
∆
(C
i
), U
i(c) )
A estratégia (e a distribuição
de probabilidades) deve ser escolhida de tal forma que o
retorno seja o mesmo, independentemente da
estratégia do outro jogador
O objetivo é provocar ao
oponente a maior perda (ou, ao menos, o menor ganho)
C D
A 4 0
B -5 3
1/4 3/4
Retorno com a estratégia A = 1/4(4) + 3/4(0) = 1
Teoria dos Jogos
Jogos de Soma Não-Zero
Também chamado de não estritamente
competitivo
Retornos não obrigatoriamente opostos ⇒
margem à cooperação entre agentes
A B
A 5, 4 2, 0
Teoria dos Jogos
Teorema do Minimax (Von Neumann)
Todo jogo de soma-zero onde os agentes
empregam estratégias mistas possui um
ponto de equilíbrio – solução ou valor do
jogo
Possibilidade de várias soluções com
Definições – PERT-CPM
PERT – Program Evaluation and Review
Technique
CPM – Critical Path Method
● Técnicas de planejamento e controle de projetos
● Empregam os conceitos de grafos (redes) para
Construção da Rede
● Nós: atividades
● Arcos: relações de precedência
Perguntas Relevantes
●
Tempo requerido para completar o projeto
●Identificação das atividades-gargalo
– críticas para não haver atrasos na execução
Caminho Crítico
● Caminho:
– qualquer rota seguindo os arcos, de INÍCIO até
FIM.
● Comprimento do Caminho:
– soma das durações das atividades sobre o
caminho.
Programação de Atividades
● Determinação dos Tempos de Início e de Término de uma
Atividade
● Emprego de 4 variáveis:
– ES (Earliest Start): tempo inicial mais cedo
– EF (Earliest Finish): tempo final mais cedo
– LS (Last Start): tempo inicial mais tarde
Regras de Programação de Atividades
●
Regra do ES = maior EF das atividades
precedentes
●
Regra do EF=ES + Duração D
●
Regra do LF = menor LS das atividades
sucessoras
Cálculo de Folgas em Atividades
● Comentários Gerais
– ES: calculado de INICIO para FIM (forward pass) – LF: calculado de FIM para INICIO (backward pass)
– LF – EF = LS – ES = folga na execução da atividade
atraso na atividade sem comprometer a duração do caminho crítico
Incerteza na Duração de uma Atividade
●
Existência de fatores de variação
inserção de
incertezas sobre a duração de cada atividade.
●
Versão original PERT: 3 tipos de estimativas
–
Mais provável (m)
–Otimista (o)
–
Pessimista (p)
Aproximações para a
Duração de Atividades
●
Média = (o + 4m + p)/6
●
Variância = [(p-o)/6]
2●
Possibilidades Adquiridas:
–
Construção do cenário de pior
caso
–
Probabilidade de ocorrência de
Probabilidade de Ocorrência de
Cenário
●
Caminho Crítico Médio
– Caminho crítico em que a duração de cada
atividade é a duração média
– Atividades estatisticamente independentes
●
Duração total do projeto
–
distribuição normal
– Cálculo do número de desvios padrão de
Modelo CPM
●
Objetivo: controlar os custos do projeto.
– Ideia básica: se colocarmos mais recursos na
execução de uma atividade, conseguiremos fazê-la mais rapidamente, embora
aumentando o seu custo.
●
Cada atividade possui 2 estimativas de
Relação entre Custos/Durações
Normal e Acelerado
Relação linear entre modelos normal e acelerado
Custo incremental: tangente do ângulo k
Objetivo: diminuir a duração do projeto minimizando o