Dispositivo Robótico para Auxílio do
Movimento do Braço
Tiago Alexandre Lopes Martins
Mestrado Integrado em Engenharia Mecânica Especialização de Automação
Orientador: Prof. António Mendes Lopes Co-orientador: Prof. Joaquim Gabriel Mendes
Dispositivo Robótico para Auxílio do Movimento do
Braço
Tiago Alexandre Lopes Martins
Mestrado Integrado em Engenharia Mecânica
Resumo
Esta dissertação tem como objetivo a produção de um dispositivo robótico para ajudar no mo-vimento de flexão do braço, utilizando sinais eletromiográficos dos músculos do utilizador.
Devido ao maior envelhecimento da população mundial e a uma maior taxa de incidência de doenças que levam a uma perda parcial ou total da capacidade motora, alternativas às estratégias clássicas de fisioterapia têm sido exploradas para compensar a crescente escassez de profissionais nesta área. O desenvolvimento de dispositivos robóticos permite ao paciente realizar os exercícios necessários, repetida e autonomamente, com mínima supervisão. Um uso permanente permite uma melhoria da qualidade de vida quando a recuperação não é possível ou suficiente.
Existem já grandes desenvolvimentos na área dos dispositivos para reabilitação motora, parti-cularmente em relação a manipulares robóticos e exosqueletos. Estes últimos têm um grande foco por integrarem o próprio utilizador no sistema de controlo, permitindo uma mais fácil adaptação e uma recuperação mais eficaz. A inclusão da aquisição de sinais eletromiográficos faz com que estes sistemas possam ser usados por pessoas sem, inicialmente, qualquer capacidade motora, e permite a implementação de sistemas que se aproximam mais do funcionamento normal do corpo humano.
São analisados os requisitos de um sistema que cumpra os objetivos estabelecidos e com base nestes requisitos, opta-se por desenvolver um sistema baseado num atuador com elementos elás-ticos em série. O projeto do protótipo é desenvolvido, tanto quanto à estrutura e funcionamento mecânicos do dispositivo, como também do seu sistema de controlo.
O desempenho dos elementos individuais foi avaliado, desde o motor aos sensores eletromio-gráficos, sendo notória para estes últimos a sua fácil integração no sistema. Os testes realizados ao dispositivo completo demonstraram o bom desempenho do sistema na realização de binário con-trolado e dão confiança quanto ao desempenho de um dispositivo completo final a ser produzido.
Abstract
This dissertation’s objective is the making of a robotic device to aid in the flexion of the arm, using electromyographical signals from the muscles of the user.
Due to the increasing age of the global population and to a higher rate of incidence of diseases that lead to a total or partial loss of the motor capacity, alternatives to the usual physiotherapy methods have been explored to compensate for the increasing lack of professionals in this area. The development of robotic devices allows the user to do the necessary exercises, repeatedly and autonomously, with minimal supervision. A permanent use of these devices allows an increase of quality of life when recovery is not possible or sufficient.
Already there are great developments in the area of devices for motor rehabilitation, namely in terms of robotic manipulators and exoskeletons. The latter have gotten a great deal of focus since they allow to integrate the user in the control system, allowing an easier adaptation to the device and a more effective recovery. The inclusion of eletromiographical signals makes it so that these devices can be used by individuals that, initially, lack any motor capacity, and allows the implementation of systems that get closer to the normal behaviour of the human body.
The performance of the individual elements was tested, from the motor to the electromyo-graphical sensors, the latter being notorious for their easy integration with the rest of the system. The tests performed on the complete device demonstrate the good behaviour of the system while producing a controlled level of torque, and give a measure of confidence in the performance of the complete and final device to be developed.
Agradecimentos
A realização desta dissertação não seria possível sem a ajuda e o apoio de várias pessoas, às quais aqui se expressam os mais sinceros agradecimentos.
Em primeiro lugar, um profundo apreço aos meus orientadores, o professor António Mendes Lopes e o professor Joaquim Gabriel, pelo tempo e paciência durante a produção e revisão desta dissertação, pela oportunidade de explorar este tema e pelos recursos que possibilitaram a concre-tização deste projeto.
Ao Jorge Almeida, pela ajuda crucial e enorme paciência sempre que era preciso produzir mais uma peça do protótipo.
Ao senhor Ramalho e ao senhor Joaquim, pelo frequente, pronto e sempre acertado apoio. A todos os meus colegas e amigos do Ramo de Automação Industrial, especialmente à malta da sala L003, cuja companhia e constante partilha de ideias fizeram a realização diária deste dis-sertação uma tarefa bem mais fácil.
Ao Rocha, ao Noé, ao Ricardo e a todos do grupo, pela amizade, apoio e paciência constantes. Aos meus pais que durante todos estes anos muito sacrificaram para eu chegar a este ponto e À minha irmã por ser a minha constante fonte de motivação.
Finalmente, a todos os outros cujas ações durante este período, direta ou indiretamente, me ajudaram na concretização desta dissertação.
Conteúdo
1 Introdução 1 1.1 Enquadramento . . . 1 1.2 Objetivos . . . 2 1.3 Estrutura da Dissertação . . . 2 2 Contextualização teórica 3 2.1 Dispositivos robóticos para reabilitação . . . 32.1.1 Manipuladores Robóticos . . . 3
2.1.2 Exoesqueletos . . . 4
2.2 Atuadores para sistemas exosqueletais . . . 7
2.2.1 Acionamento elétrico direto . . . 8
2.2.2 Atuador músculo-pneumático . . . 8
2.2.3 Atuador com elemento elástico em série . . . 9
2.2.4 Algumas considerações . . . 11 2.3 Eletromiografia . . . 11 2.3.1 Descrição . . . 11 2.3.2 Interpretação do sinal . . . 12 2.4 Conclusões . . . 16 3 Elaboração do Projeto 17 3.1 Introdução . . . 17 3.2 Definição de Requisitos . . . 18 3.2.1 Requisitos mecânicos . . . 18 3.2.2 Requisitos de controlo . . . 20 3.3 Projecto . . . 21 3.3.1 Arquitetura . . . 21 3.3.2 Funcionamento da junta . . . 21 3.3.3 Motor elétrico . . . 24 3.3.4 Material . . . 25
3.3.5 Dimensionamento geral da junta . . . 25
3.3.6 Sensorização . . . 26 3.3.7 Controlo . . . 29 3.4 Conclusão . . . 31 4 Desenvolvimento 33 4.1 Introdução . . . 33 4.2 Motor . . . 33
4.3 Junta rotativa . . . 35
4.3.1 Produção dos elementos estruturais . . . 35
4.3.2 Elementos elásticos . . . 36
4.3.3 Transdutor de posição . . . 37
4.4 Sensorização eletromiográfica . . . 38
4.4.1 Montagem dos sensores . . . 38
4.4.2 Testes realizados . . . 39 4.5 Sistema de controlo . . . 41 4.5.1 Arduino . . . 41 4.5.2 Interface virtual . . . 41 4.6 Sistema completo . . . 43 4.6.1 Comportamento esperado . . . 43 4.6.2 Testes realizados . . . 43 4.7 Conclusões . . . 52
5 Conclusões e Trabalho Futuro 53 5.1 Satisfação dos objetivos . . . 53
5.2 Trabalho futuro . . . 54
Referências 55 Anexos 59 A Componentes . . . 60
A.1 Esquema do Sensor EMG . . . 60
B Sistema de Controlo . . . 61
B.1 Programação da placa Arduino . . . 61
B.2 Interfaces LabVIEW . . . 65
C Ensaios realizados . . . 72
C.1 Ensaios com a junta na horizontal . . . 72
C.1.1 Ensaios com referência de binário nula . . . 72
C.1.2 Ensaios com referência de binário não-nula . . . 76
C.2 Ensaios com a junta na vertical . . . 80
C.2.1 Ensaios com referência de binário nulo . . . 80
C.2.2 Ensaios com Referência não-nula . . . 87
Lista de Figuras
2.1 Versão comercial do MIT-Manus . . . 4
2.2 Demonstração do braço do Hardyman . . . 5
2.3 BLEEX . . . 5
2.4 eLegs . . . 6
2.5 Variantes disponíveis do HAL (Hybrid Assistive Limb) . . . 7
2.6 Atuador músculo-pneumático FESTO . . . 8
2.7 Relação força/contração de um atuador músculo pneumático para diferentes valo-res de pvalo-ressão. . . 9
2.8 Modelo proposto por Robinson et al de um atuador em série elástica . . . 10
2.9 Esquema de um atuador em série elástica com cabos tipo Bowden . . . 10
2.10 Esquema da estrutura clássica do modelo de Hill . . . 13
2.11 Exemplo de um controlador com modelo de Hill . . . 13
2.12 Exemplo de um controlador neuronal com lógica difusa . . . 15
3.1 Esquema geral do dispositivo desenvolvido . . . 22
3.2 Esquema de funcionamento das molas do sistema . . . 24
3.3 Dimensões máximas definidas da junta . . . 26
3.4 Desenho CAD 3D da junta projetada e dos seus componentes . . . 27
3.5 Arduino Uno R1 . . . 28
3.6 Sensor EMG Muscle Sensor V3 . . . 28
3.7 Esquema simplificado do sistema de controlo do dispositivo . . . 29
4.1 Motor OMRON R7M-A20030 . . . 34
4.2 Correlação entre a referência de velocidade pretendida e a que é fornecida ao driver 35 4.3 Junta completa . . . 36
4.4 Transdutor potenciométrico GEFRAN PY2-C-010 . . . 37
4.5 Montagem dos sensores . . . 38
4.6 Primeiro ensaio eletromiográfico: esforço de flexão máximo do bicep . . . 40
4.7 Segundo ensaio eletromiográfico: esforço de extensão máximo do tricep . . . 40
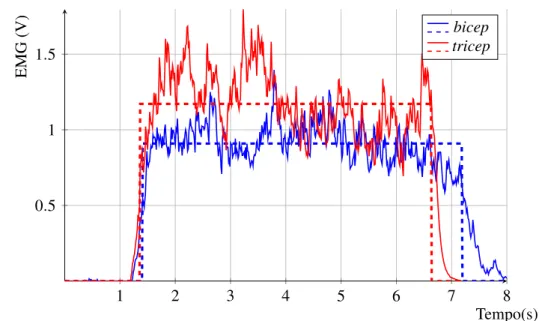
4.8 Quarto ensaio eletromiográfico: esforço máximo simultâneo do bicep e tricep . . 41
4.9 Interface virtual em LabVIEW . . . 42
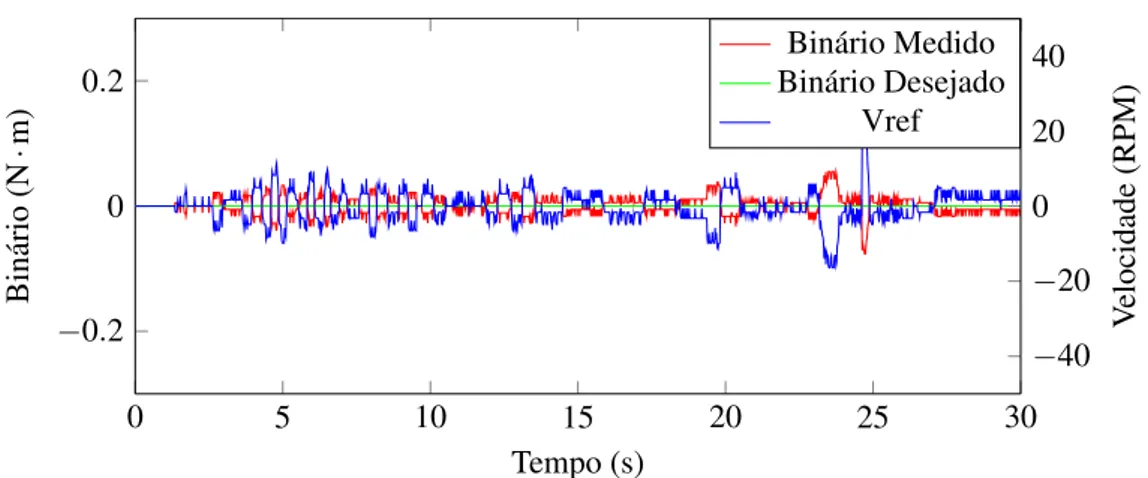
4.10 Ensaio horizontal com referência de binário nula sem ação de força externa para K p=200, Kd=0 . . . 44
4.11 Ensaio horizontal com referência de binário nula sem ação de força externa para K p=300 e Kd=0 . . . 45
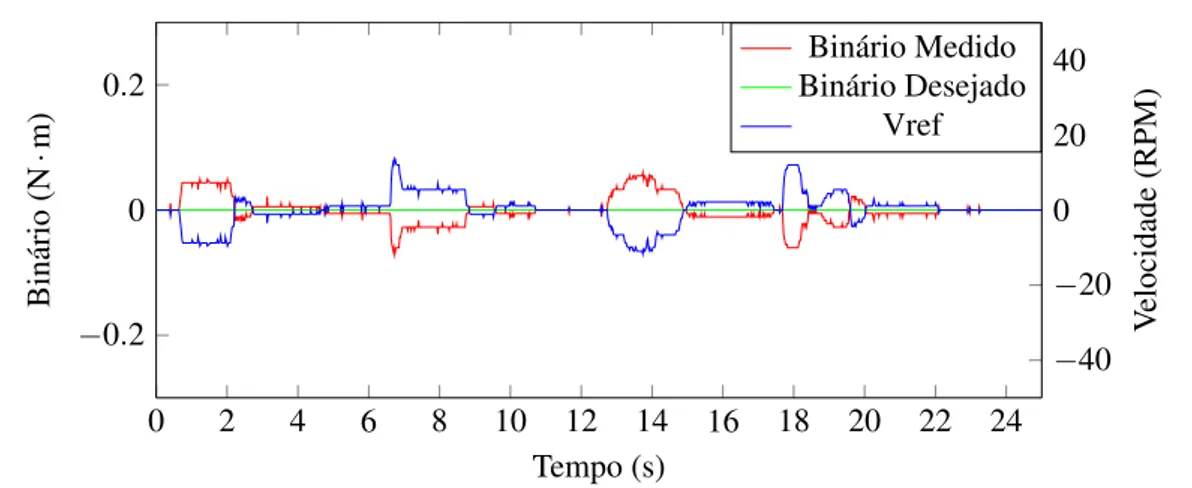
4.12 Ensaio horizontal com referência de binário nula e ação de força externa para K p=200 e Kd=0 . . . 46
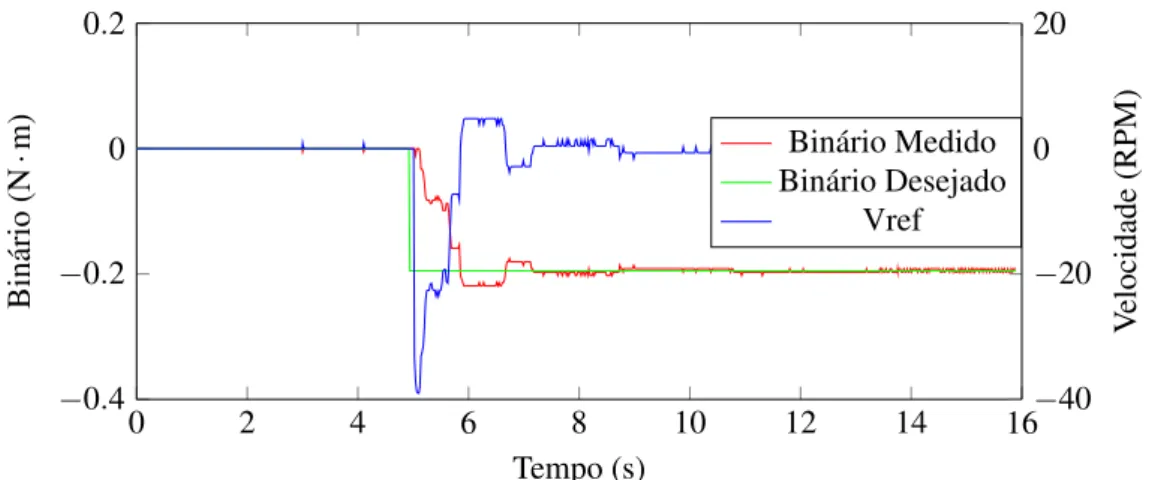
4.13 Ensaio horizontal com referência de binário não-nula para K p=200, Kd=0, Mre f
=-0.2 Nm . . . 47
4.14 Ensaio horizontal com referência de binário não-nula para K p=200, Kd=0 e Mre f=0.4 Nm . . . 48
4.15 Ensaio vertical com refêrencia de binário nula para K p=50 e Kd=0 . . . 48
4.16 Ensaio vertical com refêrencia de binário nula para K p=100 e K p=0.1 . . . 49
4.17 Ensaio vertical com refêrencia de binário nula para K p=50 e Kd=0.3 . . . 49
4.18 Ensaio vertical com referência de binário não-nula para K p=50 e Kd=0 . . . 50
4.19 Ensaio com referência de binário não-nula para K p=100 e Kd=0.2 . . . 51
A.1 Esquema do circuito do sensor Muscle Sensor v3 . . . 60
B.1 Frontend da Interface Principal . . . 66
B.2 Configuração da comunicação da Interface Principal com a placa Arduino . . . . 67
B.3 Monitorização do funcionamento da placa Arduino na Interface 1 . . . 68
B.4 Gravação dos dados na Interface 1 . . . 69
B.5 Frontend da Interface Auxiliar . . . 70
B.6 Backend da Interface Auxiliar . . . 71
C.1 Teste na horizontal, referência de binário nula sem força externa aplicada: Kp=50 e Kd=0 . . . 72
C.2 Teste na horizontal, referência de binário nula sem força externa aplicada: Kp=50 e Kd=0.2 . . . 73
C.3 Teste na horizontal, referência de binário nula sem força externa aplicada: Kp=100 e Kd=0 . . . 73
C.4 Teste na horizontal, referência de binário nula, com força externa aplicada: Kp=50 e Kd=0 . . . 74
C.5 Teste na horizontal, referência de binário nula, com força externa aplicada: Kp=100 e Kd=0 . . . 74
C.6 Teste na horizontal, referência de binário nula, com força externa aplicada: Kp=100 e Kd=0.2 . . . 75
C.7 Teste na horizontal com referência de binário não-nula: Kp=50 e Kd=0 . . . 76
C.8 Teste na horizontal com referência de binário não-nula: Kp=50 e Kd=0.2 . . . 77
C.9 Teste na horizontal com referência de binário não-nula: Kp=100 e Kd=0 . . . 78
C.10 Teste na horizontal com referência de binário não-nula: Kp=100 e Kd=0.2 . . . . 79
C.11 Teste na vertical com queda livre: Kp=50 e Kd=0.1 . . . 80
C.12 Teste na vertical com queda livre: Kp=50 e Kd=0.7 . . . 81
C.13 Teste na vertical com queda livre: Kp=100 e Kd=0 . . . 81
C.14 Teste na vertical com queda livre: Kp=100 e Kd=0.3 . . . 82
C.15 Teste na vertical com queda livre: Kp=100 e Kd=0.7 . . . 82
C.16 Teste na vertical com queda livre: Kp=300 e Kd=0 . . . 83
C.17 Teste na vertical com queda livre: Kp=300 e Kd=0.1 . . . 83
C.18 Teste na vertical com queda livre: Kp=300 e Kd=0.7 . . . 84
C.19 Teste na vertical com queda livre: Kp=500 e Kd=0 . . . 84
C.20 Teste na vertical com queda livre: Kp=500 e Kd=0.1 . . . 85
C.21 Teste na vertical com queda livre: Kp=500 e Kd=0.3 . . . 85
C.22 Teste na vertical com queda livre: Kp=500 e Kd=0.5 . . . 86
C.23 Teste na vertical com referência de binário não-nula para Kp=50 e Kd=0.2 . . . . 87
C.24 Teste na vertical com referência de binário não-nula: Kp=100 e Kd=0 . . . 88
LISTA DE FIGURAS
C.26 Teste na vertical com referência de binário não-nula: Kp=300 e Kd=0 . . . 90 C.27 Teste na vertical com referência de binário não-nula: Kp=300 e Kd=0.2 . . . 91 C.28 Teste na vertical com referência de binário não-nula: Kp=300 e Kd=0.4 . . . 92
Lista de Tabelas
3.1 Parâmetros mecânicos da junta do cotovelo . . . 18 3.2 Propriedades de massa do antebraço e da mão . . . 19 4.1 Características mecânicas do servomotor R7M-A20030 . . . 33
Abreviaturas e Símbolos
F0 Força de pré-tensão das molasFi Força elástica total exercida pela mola i M Referência de binário do controlador Jp Momento de inércia do cotovelo Cp Coeficiente de atrito do cotovelo Kp Coeficiente de rigidez do cotovelo g Aceleração gravítica
k Coeficiente de rigidez das molas
x Deflexão da mola em relação ao seu comprimento em repouso ∆ Variação em relação ao valor inicial
r Raio do disco rotativo d Diâmetro do disco rotativo AMP Atuador musculo-pneumático AVC Acidente Vascular Cerebral
BLEEX Berkeley Low Extremity Exoskeleton ECG Eletrocardiografia
EEG Eletroencefalografia EMG Eletromiografia
LVDT Linear Variable Diferencial Transformer PWM Pulse Width Modulation
SCARA Selective Compliance Articulated Robot Arm
Capítulo 1
Introdução
Neste capítulo pretende-se ilustrar o contexto em que este trabalho se insere, os objetivos que foram propostos e a estrutura geral deste relatório da dissertação.
1.1
Enquadramento
A reduzida ou completa ausência de controlo da força motora a nível dos membros superiores e/ou inferiores é uma deficiência encontrada muito frequentemente na população humana. São várias as causas possíveis: acidente vascular cerebral, encefalopatia crónica não progressiva (co-mummente denominada de paralisia cerebral), esclerose lateral amiotrófica, esclerose múltipla ou lesão medular ou cerebral traumática (sem incluir lesões que incidam diretamente no membro), entre outras. O resultado final é sempre uma grande perda da qualidade de vida do individuo afetado.
Dependendo da causa, é possível recuperar as funções perdidas através de fisioterapia e outras estratégias de reabilitação motora. Um exemplo são os pacientes que após sofrerem um acidente vascular cerebral demonstram uma perda na capacidade de força num dos braços, por terem sofrido um dano significativo nas zonas cerebrais que controlam o movimento. Para recuperar a maior parte da funcionalidade do braço, é possível estimular o cérebro a adaptar-se à lesão sofrida, através de exercícios repetidos que forçam o movimento do braço. Esta adaptação deve-se à grande neuro-plasticidade do cérebro humano, em que zonas saudáveis do cérebro podem adotar funções não originalmente suas, após suficiente estimulação.
Este é um processo intenso e frustrante para o paciente, e requer um grande número de profis-sionais fisioterapeutas para satisfazer as necessidades da população.
A tentativa de diminuir os problemas referidos levou a que tenha havido um maior interesse em utilizar sistemas robóticos para auxílio à reabilitação e mesmo compensação do movimento motor humano. Estes sistemas permitem reposicionar continuamente o membro afetado, estimulando a neuro-plasticidade do cérebro e permitindo uma recuperação mais rápida com um menor esforço
por parte do utilizador e sem ser preciso intervenção direta de um fisioterapeuta, salvo para super-visão do tratamento. Na situação em que a recuperação não é possível, estes dispositivos podem ser utilizados a título mais permanente para compensação e correção do movimento, levando a uma melhoria da qualidade de vida.
1.2
Objetivos
Este trabalho tem como objetivo principal a criação de um dispositivo que auxilie o movimento de extensão e flexão do braço ao nível do cotovelo.
O dispositivo deverá:
• utilizar sinais mioelétricos superficiais dos músculos fletores e extensores do cotovelo; • ser montado no braço do utilizador;
• não interferir com o movimento natural do braço;
• ser leve e compacto, o suficiente para ser completamente portátil.
No final desta dissertação é produzido um protótipo funcional com o propósito de validar o projeto desenvolvido.
1.3
Estrutura da Dissertação
Esta dissertação está dividida em 5 capítulos.
No primeiro capítulo, no qual esta secção se insere, são apresentadas as motivações e o objetivo principal desta dissertação.
No capítulo 2, faz-se um resumo do trabalho já desenvolvido nesta área, assim como da utili-zação da eletromiografia, tanto na generalidade como aplicada a este tipo de dispositivos.
No capítulo 3, são enunciados os requisitos do dispositivo objeto desta dissertação, a arquite-tura escolhida e o projeto resultante.
O capítulo 4 foca as as etapas de construção do sistema mecânico e sensorização do dispo-sitivo, sendo apresentada a estrutura final montada. Alguns testes do funcionamento básico (não controlado) e dos seus componentes base são realizados, a fim de determinar os vários parâmetros necessários para a finalização do controlador. Na segunda parte, o foco passa para a elaboração do controlador, desde a parte eletrónica até à sua programação. Os testes realizados com o dispositivo final também são apresentados.
No quinto e último capítulo é feita a discussão dos resultados e a conclusão do trabalho reali-zado.
Capítulo 2
Contextualização teórica
Neste capítulo são expostos conhecimentos relacionados com o tema, analisando dispositivos semelhantes assim como informação essencial à elaboração desta dissertação.
2.1
Dispositivos robóticos para reabilitação
Existe atualmente um leque variado de dispositivos robóticos desenvolvidos com o objetivo de auxiliar e amplificar o movimento natural do ser humano, seja para reabilitação, amplificação ou feedback háptico, variando largamente em escala e gama de aplicações. É possível perceber os esforços realizados para a expansão desta área, como se pode observar pelo grande número de dispositivos já desenvolvidos (Dellon e Matsuoka, 2007; Anam e Al-Jumaily, 2012; Maciejasz et al., 2014).
Dentro dos dispositivos cuja finalidade é a manipulação e condicionamento do movimento humano é possível distinguir duas grandes categorias: manipuladores robóticos e exosqueletos.
2.1.1 Manipuladores Robóticos
Manipuladores são dispositivos usados em contexto de reabilitação motora, para movimentar um membro segundo um ou mais graus de liberdade, através da manipulação de uma extremidade desse membro.
O MIT-Manus (Hogan, 1984) é baseado num robô tipo SCARA que dá ao utilizador a possibi-lidade de mover o braço segundo um plano horizontal e, se aplicado um acessório, permite também rodar completamente segundo todos os seus graus de liberdade. É um sistema já bem estabelecido para tratamentos de reabilitação motora após acidentes vasculares cerebrais, com demonstrada me-lhoria da capacidade motora do braço dos seus utilizadores após tratamentos totalizando 25 horas com o equipamento (Lum et al., 2002). Existe uma versão comercial (Interactive Motion Techno-logies, 2015), como se pode ver na Figura 2.1, estando referenciada para reabilitação de indivíduos que tenham sofrido acidentes vasculares ou traumáticos cerebrais, ou que possuam algum grau de paralisia cerebral.
Figura 2.1: Versão comercial do MIT-Manus (Interactive Motion Technologies, 2015)
Os manipuladores robóticos, no entanto, estão limitados a nível do tipo de movimentos a que podem ser aplicados. Os manipuladores precisam de se encontrar apoiados numa estrutura estável. Tipicamente são utilizados como equipamento de bancada, estando apoiados no chão ou num mesa enquanto estão a ser utilizados. Há exemplos pontuais, no entanto, de manipuladores instalados em plataformas móveis, nomeadamente cadeiras de rodas, conferindo-lhes alguma mobilidade.
2.1.2 Exoesqueletos
Exosqueletos podem ser definidos como equipamentos antropomórficos ativamente atuados, fixos ao corpo do utilizador e que se movem em paralelo a este. São equipamentos cuja abran-gência pode ir desde uma única junta do corpo controlada, até a exosqueletos que controlam o movimento do corpo completo.
O desenvolvimento do primeiro exosqueleto atuado é comummente atribuído (Anam e Al-Jumaily, 2012) à General Eletric com o Hardiman (Mosher, 1967), um exesqueleto atuado hidrau-licamente de corpo completo com a intenção de amplificar (numa razão de 25:1) a capacidade de força do utilizador. O seu desenvolvimento iniciou-se no final dos anos 60, tendo havido uma pa-tente do sistema de feedback do exosqueleto submetida em 1967 (Fick, 1970). No entanto, nunca terão sido realizados testes do exosqueleto completo com um ser humano, devido a problemas no sistema hidráulico que não permitiam a parte inferior funcionar corretamente. A Figura 2.2 mostra um único braço deste sistema. O Hardiman partiu de um projeto anterior da General Eletric, ainda na década de 60, relacionado com um exosqueleto que permitiria controlar remotamente um braço robótico. O braço robótico imitaria o movimento do exosqueleto, que em contrapartida daria um feedback de força ao utilizador, sendo presumido que isto permitiria um controlo mais preciso do
2.1 Dispositivos robóticos para reabilitação
Figura 2.2: Demonstração do braço do Hardiman (Engadget, 2014)
robô. Esta assunção partiu da ideia de que, embora sistemas robóticos permitam movimentos mais precisos, os seus controladores não serão capazes de ultrapassar a capacidade de processamento e decisão do cérebro humano. O sistema final, embora completamente funcional, era demasiado dis-pendioso e volumoso para ser utilizado pela indústria, à exceção de algumas empresas altamente especializadas.
O BLEEX (Berkeley Lower Extremity Exoskeleton), mostrado na Figura 2.3, é um exosque-leto desenvolvido para a metade inferior do corpo, que permite ao utilizador suportar uma grande quantidade de carga às costas sem que isto acarrete um acréscimo de esforço ou diminuição da mobilidade (Berkeley Robotics & Human Engineering Laboratory, 2010).
Figura 2.3: BLEEX (Berkeley Robotics & Human Engineering Laboratory, 2010)
Desenvolvido nos anos 80 com financiamento da DARPA (Defense Advanced Research Pro-jects Agency) em colaboração com a Universidade de Berkeley, tinha como objetivo melhorar a capacidade de carga e a mobilidade dos soldados norte-americanos no terreno.
Em geral, exosqueletos que incluam suporte para a parte inferior do corpo do utilizador não possuem, em teoria, limites quanto ao peso total do dispositivo, podendo apoiar esse peso direta-mente no chão sem sobrecarregar o utilizador. Isto torna-os bastante mais comuns, particulardireta-mente pelo facto de poderem ser utilizados para auxílio na manipulação e transporte de cargas pesadas, como é o exemplo do BLEEX.
Em contrapartida, quando o equipamento apenas incide na metade superior do corpo, é ne-cessária a preocupação de o sistema não sobrecarregar o utilizador. Quando a carga exercida no utilizador é excessiva, é necessário suportar o dispositivo externamente, impossibilitando, no entanto,e que o utilizador se possa movimentar livremente.
De seguida serão dados exemplos de sistemas exosqueletais em desenvolvimento atualmente. eLegs
O eLegs (Figura 2.4), também desenvolvido pelo departamento de Biónica da Universidade de Berkeley, é um exosqueleto atuado focado nos membros inferiores do corpo para permitir que um utilizador, paraplégico ou com dificuldade em andar, consiga por-se de pé, caminhar ou sentar-se sem muita dificuldade.
Para tal, tenta obter a intenção de movimento do utilizador através da deteção de variações no movimento do seu corpo, e o seu mini-controlador incorporado comanda as juntas do exosqueleto de forma a completar o movimento pretendido.
Figura 2.4: eLegs (Berkeley Robotics & Human Engineering Laboratory, 2015)
2.2 Atuadores para sistemas exosqueletais
HAL (Hybrid Assistive Limb)
Produzido pela Cyberdine, este sistema é um exosqueleto que permite ser controlado pelo uti-lizador através de sinais mioelétricos musculares superficiais. O sistema move-se por intermédio de um conjunto de juntas atuadas por motores elétricos acoplados diretamente, usando harmonic drives como redutores. O design de todo o sistema é bastante compacto e leve. A versão de corpo completo, pesando apenas 31 quilos, torna-a bastante apelativo, estética e funcionalmente.
Para usos médicos, existe uma variante do sistema para os membros inferiores para reabilitação do caminhar, assim como para uma única junta (cotovelo ou joelho). Ambas podem ser observadas na Figura 2.5. O sistema permite também auxiliar em ações coordenadas, como o caminhar ou o
Figura 2.5: Variantes disponíveis do HAL (Hybrid Assistive Limb) (Cyberdyne, 2014). À esquerda: Auxílio ao caminhar. À direita: Braço único
levantar de uma posição sentada, através de funções já pré-programadas no sistema que forçam as juntas a realizar os movimentos necessários sem ser necessário o registo da intenção do utilizador pelos sinais de EMG.
MyoPro
O MyoPro (Myomo Inc., 2015) é um exosqueleto ativo para o braço cuja atuação também de-pende dos sinais eletromiográficos superficiais dos músculos. Permite movimento segundo quatro graus de liberdade: flexão/extensão do braço e flexão/extensão, adução e abdução do pulso. É um sistema simples na sua execução, à semelhança da variante de uma só junta do HAL, que inclui um motor acoplado diretamente ao cotovelo para realizar a sua flexão e extensão.
2.2
Atuadores para sistemas exosqueletais
Os acionamentos elétricos são preferencialmente utilizados para dispositivos de reabilitação exosqueletais. No entanto, existe alguma variação no tipo de atuador utilizado, e alguns situa-ções em que se tentam explorar alternativas a acionamentos elétricos, recorrendo nomeadamente
à pneumática. Esta subsecção irá limitar-se a atuadores utilizados em exosqueletos.
2.2.1 Acionamento elétrico direto
Uma das estratégias mais simples para fazer o acionamento de um exosqueleto é a de acoplar um motor elétrico diretamente à junta. A utilização de um ou mais andares de redução pode ser necessária para se poder gerar binário suficiente para atuar a junta sem recorrer a motores elétri-cos com potências, e custos, excessivos. Redutores com grande capacidade de redução por andar, como redutores planetários ou harmonic drives, sendo redutores particularmente compactos, per-mitem produzir uma junta mecânica com menor atravancamento e com menores limitações ao movimento do utilizador. O HAL e o MyoPro, descritos na secção anterior, são exemplos típicos deste tipo de acionamento utilizados em exosqueletos.
Esta via, embora aparentemente simples, traz alguns inconvenientes. Se a estrutura do dispo-sitivo não se apoiar ao chão, o utilizador terá de suportar o peso do motor acoplado e de toda a estrutura de apoio. Isso cria um limite na massa do sistema de forma a que seja possível o seu uso de uma forma confortável. Isto é um problema comum quando o exosqueleto é fixo unicamente nos membros superiores do utilizador. O MyoPro é um bom exemplo disto, tendo uma massa total inferior a 1 kg de forma a não criar desconforto ao utilizador.
A rigidez deste tipo de acoplamento pode trazer também alguns inconvenientes. Se o atuador reagir a perturbações externas ou à intenção do utilizador sem ter em conta a elasticidade do tecido muscular, o movimento resultante não será interpretado pelo utilizador como natural e irá sentir-se um desconforto, assim como uma maior dificuldade de adaptação.
2.2.2 Atuador músculo-pneumático
Atuadores músculo-pneumáticos (AMP), como o que pode ver na Figura 2.6, são compostos por uma bexiga pneumática, sendo a entrada e a saída de ar no interior regulados por válvulas, nas extremidades, e uma manga flexível. Quando se aumenta a pressão do ar no interior da bexiga, esta expande, forçando igualmente a manga a expandir perpendicularmente ao seu eixo e diminuindo o seu curso, exercendo um esforço em tração.
Figura 2.6: Atuador músculo-pneumático FESTO. Retirado de (FESTO, 2013)
Podem ser montados num exosqueleto de forma a que um par de músculos pneumáticos em oposição controlem um grau de movimento. Isto faz com que o seu funcionamento se assemelhe ao da ação antagónica dos grupos musculares para movimento de uma junta, permitindo controlar
2.2 Atuadores para sistemas exosqueletais
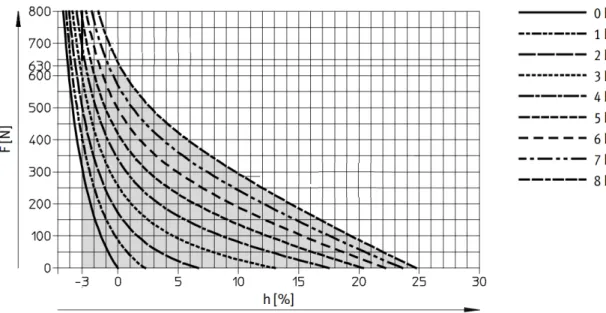
não só o binário da junta, como também a sua impedância mecânica. Combinado com a sua boa relação força-peso faz com estes atuadores sejam bastante apelativos para este tipo de aplicações. Apresentam ainda assim várias desvantagens. A primeira é o facto da força de tração variar consoante a contração do atuador e a pressão do ar no seu interior, de forma não linear, como se pode ver na Figura 2.7, tornando o controlo da força exercida mais complexo. A segunda é que embora o atuador em si seja mais leve, há a necessidade de uma fonte de ar comprimido. Esta fonte poderá ser um reservatório, como uma botija de ar, um compressor ou diretamente uma rede de ar comprimido, restringindo o design do sistema devido ao seu volume e peso.
Figura 2.7: Relação força/contração de um atuador músculo pneumático para diferentes valores de pressão. Adaptado de (FESTO, 2013)
2.2.3 Atuador com elemento elástico em série
Uma solução interessante para os sistemas em análise, em alternativa ao acoplamento direto, é a descrita e explorada por Robinson et al. (1999) para exosqueletos biomiméticos. Este tipo de atuador baseia-se na colocação de um elemento elástico, uma mola à torção ou compressão/tração, em série com o resto da cadeia de transmissão. Este elemento elástico traz várias vantagens: permite que o atuador possua um comportamento elástico semelhante à do tecido muscular; serve de buffer entre a potência do acionamento e o movimento do corpo do utilizador; e substitui o controlo do binário produzido pelo motor por um controlo de posição da deflexão do elemento elástico (traduzindo-se esta deflexão num binário aplicado pelo atuador no corpo).
O esquema da Figura 2.8 reduz o sistema a quatro variáveis: a força exercida ao motor, a massa do motor, a rigidez da mola e o amortecimento causado pela soma dos vários atritos atuantes no sistema. O controlo do sistema não tem em conta as propriedades da carga imposta, apenas a deformação que esta provoca no elemento elástico.
Figura 2.8: Modelo proposto de um atuador em série elástica. Adaptado de (Robinson et al., 1999)
Embora o atuador previsto por Robinson seja linear, o modelo já foi adaptado com sucesso para atuadores rotativos.
Kong et al. (2012) desenvolveram um exosquelto para o joelho que utiliza um atuador rotativo que possui uma mola torsora entre dois andares de redução, sendo medida a sua deflexão angular. Veneman et al. (2005), por outro lado, desenvolveram um atuador que mantém as molas line-ares, mas colocam-nas na cadeia cinemática de forma a que a sua deflexão imponha um binário no braço. Outro fator importante deste atuador é que, ao contrário dos dois anteriormente refe-ridos, o motor elétrico não se encontra apoiado e acoplado no membro a movimentar, sendo a transmissão de binário realizada por intermédio de cabos de aço tipo Bowden. Isto é feito com o intuito de diminuir o peso do atuador imposto ao utilizador devido ao elemento motor. Estes cabos poderão ser considerados elementos elásticos, embora a sua rigidez seja tão elevada que a sua deflexão é desprezada para efeitos de controlo. Os cabos introduzem um fator de atrito extra não negligenciável. A Figura 2.9 mostra um esquema do funcionamento deste atuador.
Figura 2.9: Esquema de um atuador em série elástica com cabos tipo Bowden. Adaptado de (Veneman et al., 2005)
2.3 Eletromiografia
2.2.4 Algumas considerações
Existe uma grande variedade de tipos de atuação em sistemas exosqueletais, tendo apenas sido selecionadas para incluir nesta dissertação aquelas com maior utilização ou com implementação mais interessante.
Há uma predominância dos acionamentos elétricos nesta área. Boa relação potência/peso, fácil aquisição de equipamento e menores requisitos de controlo tornam este tipo de acionamento quase indispensável para a produção destes sistemas. Verifica-se que uma grande parte dos dispositivos comerciais para reabilitação motora tem como base um acionamento elétrico.
A solução pneumática traz algumas vantagens interessantes, mas dificuldade no transporte e gestão da sua fonte de energia retiram bastante apelo ao seu uso. Ainda assim, é uma alternativa explorada com alguma frequência no meio académico, podendo no futuro ser exploradas soluções que compensem as desvantagens mais críticas deste tipo de atuação.
Soluções hidráulicas são quase inexistentes para reabilitação motora. Componentes hidráu-licos são dispendiosos e particularmente pesados em comparação com acionamentos elétricos e pneumáticos, pelo que o seu uso está limitado a aplicações em que a sua grande capacidade de força compense estas desvantagens. Convém, no entanto, dar nota que a hidráulica aparece na gé-nese da investigação de exosqueletos ativos, no caso do Hardiman, e mostra óbvia utilidade para o desenvolvimento de soluções para a indústria e sectores militares onde a capacidade de carga é um fator crítico. Para reabilitação motora, no entanto, existem alternativas mais favoráveis.
2.3
Eletromiografia
Um dos objetivos desta dissertação é conseguir o controlo do dispositivo robótico através de sinais eletromiográficos do utilizador. Esta secção irá explorar a aquisição e a interpretação destes sinais.
2.3.1 Descrição
Eletromiografia (EMG) é uma técnica de diagnóstico médico que consiste na aquisição de sinais elétricos provenientes dos músculos. Assemelha-se à eletroencefalografia (EEG) ou a ele-trocardiografia (ECG), sendo que as diferenças prendem-se unicamente com o órgão ou tecido no qual se recolhe impulsos elétricos, requerendo elétrodos e condicionamento de sinal adequados a cada caso.
O sinal é medido através do potencial elétrico num ponto (face a uma referência) ou através da diferença de potencial entre dois ou mais pontos. Esta medição pode ser realizada com elé-trodos à superfície da pele, na zona do músculo, ou intramuscularmente com recurso a agulhas. A EMG de superfície tem a vantagem de ser fácil e rápida de utilizar, com a contrapartida de não ser tão fiável (muito influenciável por fatores como impurezas, oleosidade da pele ou gordura subcutânea nas zonas a analisar) e de ser inadequada para aquisição de dados de músculos não
superficiais. Se se tentar detetar atividade elétrica superficialmente, de um grupo muscular que te-nha outro sobreposto, o elétrodo irá previsivelmente detetar a atividade elétrica do grupo muscular sobreposto mais facilmente, pelo que a utilização prática destas medições é difícil sem métodos de caraterização do sinal de elevada complexidade.
Por outro lado, a via intramuscular exige mais tempo de preparação (podendo mesmo exigir cirurgia, dependendo da aplicação), mas garante melhor fiabilidade e precisão dos resultados.
A colocação dos elétrodos é importante para garantir a utilidade das medições. O SENIAM (Surface Electromiography for the Non-Invasive Assessment of Muscles) é um projeto da Comis-são Europeia para criar uma série de recomendações para a utilização de eletromiografia superficial com o intuito de facilitar a troca de conhecimentos obtidos através deste método. Estas recomen-dações partem de revisões bibliográficas extensas (Hermens et al., 2000) que analisaram as várias estratégias utilizadas em vários artigos científicos ao longo dos anos. O projeto concluiu que na maioria das vezes eram utilizados elétrodos bipolares na "barriga"do músculo (a zona central mais pronunciada do músculo) ao longo do sentido das fibras. O sítio do projeto (SENIAM, 2015) dá também referências quanto à colocação dos elétrodos para análise de músculos específicos.
2.3.2 Interpretação do sinal
Obter a intenção de movimento do utilizador através dos sinais eletromiográficos é uma ta-refa difícil, que se torna mais complexa quanto maior o número de graus de liberdade e grupos musculares a analisar.
A forma mais simples de se interpretar estes sinais é considerar que a força produzida por um grupo muscular é unicamente proporcional à intensidade do sinal recebido. Para tal, considera-se o nível de ativação muscular em vez do valor absoluto do sinal, em que se posiciona a intensidade atual do sinal em relação às intensidades em esforço nulo e esforço máximo.
Esta aproximação, no entanto, é limitada a um número reduzido de movimentos (nunca para mais de dois movimentos diferentes no mesmo membro). Tipicamente um simples movimento numa junta é realizado através da contração de vários grupos musculares, variando consoante a velocidade do movimento e da posição da junta. Um mesmo grupo muscular pode também influenciar mais do que um movimento em mais do que uma junta. O cérebro humano é capaz de controlar todos estes fatores instintivamente de forma a que o corpo possa realizar um movimento fluído, mas esta complexidade torna impraticável determinar a intenção do utilizador para mais do que dois movimentos simples (como a flexão e a rotação do cotovelo), sem se ter em conta um grande número de variáveis.
Este problema é gerido de duas formas muito distintas: o recurso a modelos paramétricos de Hill, baseados no trabalho original de A. V. Hill (1938), e a utilização de redes neuronais de lógica difusa.
2.3 Eletromiografia
Modelos de Hill
O primeiro método requer conhecimento da fisiologia e composição do tecido do corpo hu-mano (em particular dos músculos associados aos movimentos a analisar), assim como da sua estrutura músculo-esquelética. Os modelos de Hill partem da premisa que um grupo muscular pode ser simplificado num sistema composto por um elemento contrátil em série e em paralelo com dois elementos elásticos (muitas vezes considerados iguais para facilitar o seu cálculo), como ilustrado na Figura 2.10.
Figura 2.10: Esquema da estrutura clássica do modelo de Hill. O elemento contrátil (CE) está associado a um elemento elástico em série (SE) e outro em paralelo (PE). Adaptado de (Winters, 1990)
A força exercida pelo grupo muscular será diretamente proporcional ao nível de ativação neu-romuscular, e também das suas propriedades visco-elásticas, que irão depender da extensão no momento do grupo muscular, da velocidade do seu movimento e das propriedades mecânicas do tecido. A última é possível de obter através de vários trabalhos extensos já realizados nesta área (Winters e Stark, 1985), enquanto os outros dois parâmetros podem ser calculados através da posição e velocidade angular das juntas associadas aos músculos em causa.
Figura 2.11: Exemplo de um controlador com modelo de Hill. Adaptado de (Cavallaro et al., 2005)
Como os modelos tentam ser uma boa representação da atividade muscular, acabam por ser modelos de ordem elevada devido à grande não-linearidade de todo o processo. Assim, este mé-todo exige uma grande capacidade de processamento para ser usado em tempo-real, sendo que a complexidade do modelo aumenta com o número de movimentos (e, consequentemente, de sinais eletromiográficos) a analisar.
A Figura 2.11 mostra um exemplo de um controlador com base num modelo de Hill. O controlador determina o nível de ativação muscular, com base no sinal eletromiográfico recolhido, para inserir no modelo de Hill. O ângulo da junta, combinado o que é conhecido sobre a cinemática e estrutura óssea do braço, dá informações sobre a extensão e velocidade dos músculos assim como da distância entre o ponto de aplicação da força muscular e o centro de rotação da junta.
Têm a vantagem de ser facilmente adaptáveis a diferentes indivíduos visto que o modelo utiliza parâmetros corporais básicos que não variam de forma significativa de pessoa para pessoa. Redes neuronais de lógica difusa
A utilização de redes neuronais para processamento dos sinais eletromiográficos baseia-se numa estratégia oposta à dos modelos de Hill. Em vez de se tentar perceber os mecanismos e os fenómenos que ocorrem entre a ativação neuronal dos músculos e a força desenvolvida pelos mesmos, assume-se que o seu conhecimento completo é desnecessário e opta-se por considerar o sistema muscular mais como uma caixa negra com os sinais eletromiográficos à entrada e a força muscular desenvolvida à saída. A rede neuronal é treinada para encontrar uma relação otimizada entre estes dois parâmetros.
A lógica difusa é utilizada em conjunção às redes neuronais para complementar algumas des-vantagens destas. em primeiro lugar. Este tipo de lógica é tipicamente utilizado para encontrar soluções onde os parâmetros de decisão são ambíguos. Muito utilizada para atribuição de variá-veis linguísticas (decidir se está "quente","frio"ou "ameno"dada uma temperatura), permite criar uma estrutura e conjunto de regras iniciais para posterior afinação pela rede neuronal.
Tendo já sido demonstrada por Hill a relação entre a força do músculo e a extensão e veloci-dade, também estes parâmetros são incluídos nestes modelos.
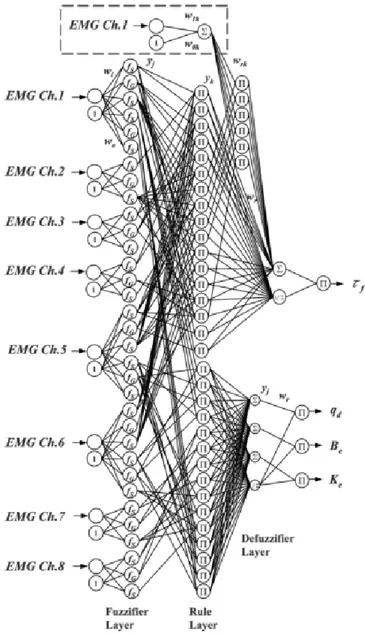
A Figura 2.12 mostra um controlador neuronal com lógica difusa. Este controlador tenta deter-minar 4 parâmetros de movimento com 2 graus de liberdade utilizando 8 sinais eletromiográficos. A primeira camada do controlador classifica as entradas em fuzzy sets (fuzzyfication), indicando a sua correspondência a uma variável linguística, numa escala de 0 a 1. A camada seguinte de-termina, baseado nos fuzzy sets iniciais e nas regras de associação estabelecidas, qual a resposta a realizar. No entanto, esta resposta ainda se expressa em fuzzy sets, sendo necessária a camada seguinte que converter a resposta em variáveis quantificáveis (defuzzyfication), ou seja, as quatro variáveis de saída desejadas . A rede neuronal tenta afinar os pesos dados a cada variável nas transições entre camadas
Esta é uma estratégia interessante quando o número de graus de liberdade do movimento aumenta consideravelmente, pelo que embora o esforço computacional aumente, o facto de ser
2.3 Eletromiografia
apenas necessário identificar os grupos musculares relevantes para o movimento facilita muito a sua implementação. Os modelos resultantes também exigem menor capacidade computacional, em teoria, visto que tentam arranjar a correlação mais eficiente entre as entradas e a saída. No entanto, é necessário treinar a rede neuronal sempre que muda o utilizador.
Figura 2.12: Exemplo de um controlador neuronal com lógica difusa. Retirado de (Kiguchi et al., 2005)
2.4
Conclusões
A área dos dispositivos robóticos para reabilitação motora é uma área multidisciplinar, exi-gindo conhecimentos não só de medicina, como também de mecânica, eletrónica e mesmo infor-mática. Verifica-se que se tem feito um trabalho extenso no desenvolvimento destes dispositivos, mas a transição de muitas das inovações para uso real e regular em pacientes tem sido lenta, pre-dominando ainda os métodos clássicos.
Equipamentos exosqueletais, em particular, têm ainda uma abrangência muito limitada, es-tando a maioria em fase de ensaios clínicos ou apenas em comercialização no país de origem. Espera-se, ainda assim, que em anos vindouros estes dispositivos se tornem comuns a nível global e não somente para reabilitação humana, mas também para amplificação das capacidades motoras do utilizador.
Para tal, a criação de dispositivos mais leves, compactos e confortáveis torna-se crucial, ha-vendo uma clara procura de atuadores que permitam melhor capacidade, sem sobrecarregar o utilizador. A tentativa de integração da intenção de movimento do utilizador através de sinais eletromiográficos tem tido considerável sucesso, tendo sido desenvolvidos métodos para controlar movimentos complexos. As melhorias a nível do poder computacional existente têm ajudado este progresso.
Capítulo 3
Elaboração do Projeto
3.1
Introdução
Nos capítulos anteriores são referidos o objetivo desta dissertação bem como algum do traba-lho desenvolvido nas áreas em que esta se insere. Com efeito, é possível perceber que existem várias alternativas viáveis em relação a como desenvolver o dispositivo, tanto a nível da estrutura mecânica como da estratégia de controlo a utilizar.
O sistema tem em conta vários fatores:
• Objetivos — o projeto tenta ser o mais realista possível em relação aos objetivos e requisi-tos, de forma a ser possível de concretizar;
• Tempo e Custos de produção — a aquisição de componentes, assim como a produção de peças, está limitada pelo orçamento disponível e limite de tempo de desenvolvimento designado. É necessário acomodar os requisitos do sistema a estas restrições, favorecendo o emprego de componentes off-the-shelf, cujo desempenho poderá não ser ótimo para o funcionamento do sistema;
• Equipamento disponível — Algum do equipamento utilizado é providenciado antes do início do desenvolvimento, tendo condicionado as decisões tomadas.
Este capítulo dará uma perspetiva dos requisitos e limitações inerentes ao sistema que levaram às opções tomadas.
3.2
Definição de Requisitos
3.2.1 Requisitos mecânicosA não-homogeneidade da anatomia humana torna difícil definir os requisitos mecânicos para o sistema a projetar. Extensão, massa total e relação entre o comprimento dos segmentos do braço são fatores que podem comprometer o correto funcionamento do dispositivo. A massa do ante-braço é talvez o mais importante elemento, impondo um limite inferior na capacidade de binário do atuador escolhido, caso o intuito seja conseguir levantar o braço completamente, sem auxílio do próprio utilizador. Muitos trabalhos (Winters e Stark, 1985) tentam definir as propriedades mecânicas do sistema musculosquelético do ser humano. A Tabela 3.1 expõe as propriedades me-cânicas de uma junta atuada, cuja cinemática e dinâmica se assemelha à do conjunto de músculos, ossos e tendões que compõem o cotovelo. Esta tabela permite delinear um binário máximo para o sistema de 60 N · m. No entanto, percebe-se que para efeitos de recuperação este é um valor lar-gamente excessivo, pois para um comprimento médio do antebraço de aproximadamente 269 mm (tabela 3.2), isto seria equivalente ao braço estar a suportar na mão um peso de aproximadamente 223 N.
Tabela 3.1: Parâmetros mecânicos da junta do cotovelo para um jovem adulto saudável médio. Valores adaptados de (Winters e Stark, 1985)
Parâmetros Flexão Extensão
Binário máximo 60 50 N · m
Jp1 0,06 kg · m2
Cp2 0,2 N · m · s · rad−1 Kp3 1,5 N · m · rad−1
Rotação máxima 175 graus
1 Inércia da junta;
2Constante de amortecimento da junta 3Constante de rigidez da junta
Não é objetivo do projeto que o dispositivo amplifique a força do utilizador, mas sim que auxi-lie a sua recuperação. Embora uma maior capacidade de binário por parte do dispositivo seja um fator positivo para a experiência do utilizador, seria contraproducente sacrificar o atravancamento do sistema para obter este benefício.
Mais útil para este projeto será obter o binário mínimo necessário, o que implica ter conheci-mento da massa dos segconheci-mentos do braço e a posição dos seus centros de massa. Tal como para os dados da tabela 3.1, é necessário recorrer a valores médios de indivíduos saudáveis de forma a obter uma referência inicial dos requisitos do dispositivo.
O trabalho de Leva (1996), baseado num trabalho anterior de Zatsiorsky et al. (1983), é útil como uma referência para estes valores médios. Convenientemente, os centros de massa estão expressos relativamente aos eixos de rotação dos respetivos segmentos. Os valores retirados deste trabalho estão resumidos na tabela 3.2.
3.2 Definição de Requisitos
Tabela 3.2: Propriedades de massa do antebraço e mão; Valores retirados de (Leva, 1996)
Segmento Massa% 1 Massakg Comprimentomm Centro massa (CM)% 2 Centro massa (CM)mm
Antebraço 1,62 1,18 268,9 45,74 123
Mão 0,61 0,45 187,9 36,24 68,1
1 Relativamente à massa corporal total de um individuo masculino médio (73 kg); 2 Distância entre o centro de massa do segmento e o centro da junta correspondente
(percentagem relativa ao comprimento total do segmento)
Isto permite obter imediatamente uma estimativa do binário máximo resistente, produzido no cotovelo, devido ao peso combinado do antebraço e da mão (assume-se que é máximo quando o antebraço e a mão estão alinhados e perpendiculares ao sentido da gravidade):
Mmao= (CMmao+Comprimentoantebraco)· Massa · g = (0,0681 + 0,123) · 0,45 · 9,81
=0.84N · m
Mantebraco= (CMantebraco· Mantebraco· g =0,123 · 1,18 · 9,81 =1.42N · m
Mtotal =2.26N · m
No entanto, ao contrário dos valores da tabela 3.1, que podem ser encarados como máximos para um indivíduo com um nível de atividade física normal, os valores médios para a massa do braço têm de ser interpretados de uma forma mais cuidada. É preciso entender que este dispositivo não está nem deve ser limitado em relação à idade, género ou nível de atividade física do utilizador. Ainda assim, limites práticos terão de existir para tornar o projeto viável, pelo que se assumirá o valor médio obtido como uma estimativa não conservadora.
Face ao valor obtido, considera-se que um binário atuante máximo na junta de 3 N · m será suficiente para levantar o braço sem auxílio do próprio utilizador. Este valor, arbitrário, compensa eventuais perdas de binário devido a atritos e permite satisfazer situações em que a massa do braço do utilizador possa ser superior à estimada. Esta assunção carece, no entanto, de verificação experimental.
O valor da rotação máxima do braço tende a variar ligeiramente, consoante a literatura reco-lhida, assim como o que é considerado como rotação máxima. O que se pode observar na tabela 3.1 é um valor absoluto para a rotação máxima. Esta posição é alcançável se o utilizador relaxar o braço, em particular o bícep e forçar o movimento externamente, por exemplo com o outro braço. Para efeitos desta dissertação, é mais útil considerar-se que a rotação máxima do cotovelo equivale ao arco que o antebraço realiza num movimento entre a posição de extensão máxima e a posição de contração máxima não-auxiliada por forças para além dos músculos do próprio braço.
Para facilitar a distinção, considera-se que esta é a rotação ou flexão máxima voluntária do braço, sendo que valores experimentais variam entre os 140 e 150º (Andel et al., 2008; Rahman et al., 2010; Forner-cordero et al., 2011).
Não é do interesse da segurança do indivíduo permitir que o dispositivo consiga forçar o braço para além da rotação máxima voluntária, podendo isto causar dor ou, inclusivamente, lesões. As-sim, o dispositivo terá ser mecanicamente limitado (garantindo este limite mesmo em caso de falha elétrica ou erro do sistema de controlo) a uma rotação máxima de 140°, evitando que o dispositivo atinja as posições de flexão e extensão máxima do braço.
3.2.2 Requisitos de controlo
O sistema de controlo estará largamente dependente dos componentes de sensorização e atua-ção utilizados.
• Monitorização — o sistema de controlo deve permitir a observação do desempenho do dis-positivo por parte de um utilizador avançado, nomeadamente o fisioterapeuta. Para tal terá de ser capaz de armazenar dados decorrentes da utilização do dispositivo para análise pos-terior, assim como algum tipo de capacidade de monitorização em tempo real.
• Limitação de força — o sistema deverá prevenir que a junta exerça força acima de um limite que se considere seguro para o utilizador e para os componentes do próprio dispositivo. • Robustez — tendo em conta o contexto médico da utilização deste dispositivo, é imperativo
garantir que o sistema funcione de forma previsível e não errática em casos de solicitações incorretas. O sistema de controlo também terá de ter em consideração perturbações e ruído existente no sinal dos sensores, diminuindo ao máximo a sua influência.
O sistema de controlo adotado é baseado numa placa Arduino. O seu uso permite dar flexibili-dade ao projeto e poupar algum tempo na montagem do circuito de controlo. É possível integrar a maior parte dos sensores e sinais de feedback sem necessitar de componentes elétricos auxiliares, e os sensores eletromiográficos utilizados estão já preparados para uso direto com a placa.
A monitorização será feita através de um computador, podendo ser estabelecida a comunicação entre este e o Arduino através de uma ligação USB, e será também a partir desta ligação que será realizada a programação da placa e a afinação do controlo do sistema. Não é previsto a criação de uma HMI (Human Machine Interface) física para o dispositivo, optando-se por uma interface em ambiente virtual usando LabView.
3.3 Projecto
3.3
Projecto
3.3.1 Arquitetura
A solução escolhida para esta dissertação é a de um atuador rotativo com elementos elásticos em série, com a transmissão de binário do motor para a junta rotativa realizada por cabos tipo Bowden. Para além das características deste tipo de arquitetura, referidas na Sub-Secção 2.2.3, este sistema tem algumas vantagens particulares:
• Adaptabilidade — os componentes do sistema têm em consideração os requisitos mecâ-nicos explicitados no início deste capítulo. No entanto, o desacoplamento do motor e da junta rotativa dá a possibilidade de, durante o desenvolvimento do protótipo e projetos pos-teriores, ser aumentada ou diminuída a capacidade de força do sistema, dentro de certos limites máximos, havendo apenas a necessidade obrigatória de trocar o motor e as molas. A substituição dos outros componentes dependeria apenas da capacidade da estrutura suportar o esforço acrescido.
• Facilidade de ajuste — derivado do primeiro ponto, a adaptabilidade do sistema permite que variados parâmetros mecânico possam ser ajustados - a rigidez das molas, o coeficiente de atrito entre o cabo e a espiral, a capacidade de binário do atuador - sem que todo o dispositivo tenha de ser refeito. Isto, pois, permitirá realizar testes que permitam verificar a influência de alguns destes parâmetros no sistema num tempo comportável para a realização da dissertação.
De notar que o trabalho original de Veneman, a partir do qual este projeto irá desenvolver-se, foi desenvolvido para controlar a impedância mecânica (a resistência do sistema contra deslo-camentos impostos externamente) da junta do joelho. A necessidade de binário do dispositivo realizado nesta dissertação é menor, e o controlo do sistema difere pela inclusão da intenção de movimento do utilizador, através dos sinais EMG, no sistema de controlo.
3.3.2 Funcionamento da junta
A junta é composta por 3 elementos estruturais: o suporte superior que se fixa ao braço; o suporte inferior, fixo ao antebraço; e o disco rotativo, que roda independentemente dos suportes, onde se fixam os cabos que fazem a transmissão do binário entre a junta e o motor (fixo ao motor encontra-se um disco semelhante).
O disco está projetado para permitir montar os cabos de forma a que não exista escorregamento entre o disco e o cabo, mesmo com o revestimento que este possui para evitar fricção com a espiral do cabo, tentando maximizar a zona de contacto. Uma alternativa a esta solução é utilizar um cerra-cabos que fixe o cabo diretamente no disco, embora esta solução não tenha sido explorada nesta dissertação. Também é fixo outro cabo que serve de ligação entre o disco e as anilhas de suporte das molas, de forma que a sua rotação provoque uma deflexão nas molas se o suporte
Figura 3.1: Esquema geral do dispositivo desenvolvido
inferior estiver imobilizado. O esquema da Figura 3.1 tenta ilustrar a estrutura geral do dispositivo. Decide-se utilizar molas à compressão em detrimento de molas à torção, embora esta última seja, em princípio, mais adequada para um movimento de rotação. Esta opção vem do facto de ser mais simples realizar a medição da deflexão de uma mola linear através do uso um transdutor de posição linear posicionado paralelamente ao eixo da mola. No caso de uma mola à torção, a sua deflexão já teria de ser medida através da diferença da posição angular entre a base inferior e o disco, implicando que o transdutor teria de se encontrar dentro do corpo da junta o que seria dificultado pelo atravancamento da junta e pela grande quantidade de componentes em movimento constante.
A deflexão da mola é determinada através da medição da variação da posição da anilha relati-vamente ao suporte inferior, utilizando um transdutor de posição linear. Para se poder relacionar esta medição com o binário imposto ao braço, assume-se que a rigidez da mola é suficientemente constante, ou seja, varia de forma desprezável, à medida que é deformada de forma a se poder afirmar que:
Fi=k · xi (3.1)
Mi=Fi· r (3.2)
3.3 Projecto
em que k é a constante de rigidez da mola, xié a deflexão da mola medida em relação à sua posição de repouso (força elástica nula), r é o raio do disco e Mié o binário imposto pela mola i ao suporte inferior segundo o eixo de rotação da junta.
Se as molas forem montadas sem as pré-tensionar, apenas uma estará a ser comprimida num dado instante. Esta é uma situação indesejável, passando a haver a necessidade de se utilizar um transdutor para cada mola.
Por outro lado, pré-tensionando as molas durante a montagem permite escrever que
Fi=F0i+ ∆Fi, (3.4)
sendo F0i a força inicial da mola i após pré-tensão e ∆Fi a variação da força elástica da mola em relação à força inicial.
Como a rigidez das molas é considerada constante em relação ao curso, a variação da força elástica ∆Fipode ser considerada linear em relação à variação da sua deflexão ∆xi (Equação 3.5), e como as duas molas são igualmente rígidas, a deflexão de uma mola implica uma deflexão de igual valor e sentido oposto da outra mola.
∆Fi=c · ∆xi; (3.5)
∆x1=−∆x2= ∆x ; (3.6)
∆F1=−∆F2. (3.7)
O binário total Mmolaspode então ser escrito como a diferença do binário realizado por cada mola. Assumindo que a pré-tensão aplicada é igual para cada mola,
F01=F02=F0; (3.8)
Mmolas=M1− M2=F1· r − F2· r ; (3.9) Mmolas= (F0− F0)· r + ∆F1· r − ∆F2· r ; (3.10) Mmolas= ∆F1· r + ∆F1· r ; (3.11)
Mmolas=k · d · ∆x , (3.12)
em que d é a distância entre as duas molas (igual ao diâmetro do disco). Estas relações estão representadas na Figura 3.2.
Comparando as equações (3.3) e (3.12) percebe-se que pré-tensionando as molas a razão entre o binário na junta e a deflexão de uma das molas duplica, permitindo o uso de uma mola com menor comprimento (assumindo constante de rigidez igual). Isto é importante porque faz com que uma solicitação desviada na mola provoque uma flexão indesejada desprezível. Também possibilita o uso de transdutores com um menor curso e mais compactos, diminuindo o atravancamento total do dispositivo.
Figura 3.2: Transmissão de binário pelos elementos elásticos
3.3.3 Motor elétrico
O motor elétrico não é apenas um fator limitativo em relação à capacidade de binário do dispositivo. O tipo de motor escolhido, assim como do driver associado, influencia o tipo de controlo que é possível realizar e, consequentemente, a dinâmica de todo o sistema.
Um dos fatores mais críticos é a baixa velocidade de rotação da junta, e consequentemente, do motor. Forner-Cordero et al. (2011) determinaram experimentalmente que a velocidade de rotação máxima do braço é de aproximadamente 90 ° · s−1, ou 15 rotações por minuto. Considerando que a velocidade nominal de um qualquer tipo de motor elétrico é pelo uma ordem de grandeza superior a este valor, bem como o facto de ser necessário que o motor produza o seu binário máximo mesmo em velocidade nula, há uma limitação óbvia quanto ao tipo de motor elétrico utilizado.
A necessidade de garantir binário mesmo em velocidade nula obriga necessariamente à utiliza-ção de um servomotor, garantindo que o motor não sobreaquece nesta situautiliza-ção. A baixa velocidade de rotação leva a uma potência elétrica requerida igualmente baixa. Embora o binário máximo es-teja estabelecido para o valor de 3 N · m, a utilização de um ou mais andares de redução permitiria utilizar um motor elétrico com menor capacidade de potência e binário, mais energicamente efi-ciente, mais leve e consideravelmente menos dispendioso (embora seja preciso considerar o custo do redutor), face a um motor elétrico cujo binário máximo seja igual ao exigido.
A utilização de um servomotor DC seria ótima, pois permite, se a potência total necessário dos componentes elétricos dos sistema for suficientemente baixa, a fácil utilização de baterias para a sua alimentação (embora esta opção não seja explorada nesta dissertação).
Face a todas estas considerações, o recurso a um servomotor passo-a-passo torna-se elementar. Motores passo-a-passo são utilizados regularmente em aplicações onde a velocidade requerida é reduzida, até porque a sua capacidade de binário máxima diminui rapidamente com o aumento da sua velocidade de rotação.
São motores compactos e menos dispendiosos comparados com outros motores na mesma gama de binário.
3.3 Projecto
Têm também facilidade na realização de binário a velocidade nula, e produzem uma resistência notória ao movimento mesmo quando não estão alimentados eletricamente, garantindo que mesmo em caso de falha energética, o movimento da junta nunca é completamente livre (não se pode considerar, no entanto, este facto como garantia de segurança da junta, apenas um fator adicional).
3.3.4 Material
A fim de limitar o peso da junta, a solução mais vantajosa será produzi-la em alumínio, de-vido à sua baixa densidade (2700 kg · m−3) e à sua tensão de cedência específica (a razão entre a tensão de cedência e a densidade). O protótipo, ainda assim, foi produzido por impressão 3D em PLA (poliácido láctico). Este polímero foi escolhido em contrapartida ao mais comum ABS (acrilonitrilo-butadieno-estireno) devido à maior rigidez e por permitir produzir peças com deta-lhes mais finos. O PLA possui menos de metade da densidade do alumínio (1300 kg · m−3), e o material utilizado tem uma tensão de cedência de 55 MPa, bastante inferior à do alumínio. A ten-são de cedência do material polimérico é ainda diminuída após impresten-são das peças, facto inerente deste processo de prototipagem.
3.3.5 Dimensionamento geral da junta
A Equação 3.12 mostra também um compromisso que é necessário encontrar no design da junta do dispositivo. Como o binário da mola também depende do diâmetro do disco, é possível diminuir a força máxima que as molas têm de exercer, seja através da diminuição da rigidez, seja através da deflexão máxima das molas, embora isto implique aumentar o tamanho do disco e, consequentemente, toda a estrutura da junta.
Por outro lado, diminuir o diâmetro do disco implica aumentar a força exercida na estrutura, nomeadamente no veio central, no disco e no suporte inferior. Isto implica reforçar todas estas peças, seja aumentado a espessura das paredes e o diâmetro do veio, aumentando o peso da estru-tura, ou usar um material mais resistente, mais pesado e/ou mais dispendioso. As molas também terão de ser mais extensas e rígidas, necessariamente aumentando o seu peso e possivelmente o tamanho do transdutor utilizado. A força necessária para pré-tensionar as molas também aumenta, dificultando o processo de montagem.
Os cabos escolhidos são tipicamente usados para travões de bicicleta, em aço revestido em teflon ou polietileno. Possuem 1.5 mm de diâmetro e uma tensão de resistência à rotura de 1570 MPa, o que para este diâmetro de cabo equivale a resistir a uma força em tração até apro-ximadamente 11 kN. Para um raio do disco de 5 mm, por exemplo, seria necessário um binário de 55 N · m para ocorrer a rotura do cabo, largamente excedendo os 3 N · m indicados na Secção 3.2.1. Como para um raio de disco maior seria necessário ainda mais binário, não se considera o cabo de aço um elemento limitativo.
Para a produção do protótipo, decidiu-se desenhar a estrutura com base em limites máximos arbitrários para as suas dimensões gerais (como se pode ver na Figura 3.3, tentando assegurar que
a junta não aparente ser demasiado volumosa para o utilizador. Fixos estes valores, verifica-se que o tamanho máximo do disco para possibilitar a montagem das molas é de 70 mm de diâmetro.
Figura 3.3: Dimensões máximas definidas da junta
O desenho da junta projetada pode ser visto no Anexo B e a sua representação em 3D, assim como dos componentes individuais, realizada no software de CAD 3D SolidWorks, encontra-se na figura 3.4.
3.3.6 Sensorização
Aquisição de sinal
A aquisição dos sinais tanto do sensor EMG como do transdutor de posição (assim como outros sinais possíveis) é efetuada usando uma placa Arduino Uno (Figura 3.5). Esta placa possui 6 pinos analógicos associados a um conversor A/D de 10 bits. Os pinos podem receber uma sinal em tensão entre 1.1 a 5 V, sendo importante definir convenientemente a referência utilizada para maximizar a resolução da conversão.
A placa não consegue converter sinais de valor de tensão negativo, o que pode implicar condi-cionamento de sinal adicional. O sensor EMG, por outro lado, já está preparado para uma conexão direta com o Arduino, não sendo necessário qualquer adaptação. O Arduino está conectado a um computador usando o software LabView através de uma porta USB. A interface em LabView per-mite fazer a monitorização do funcionamento do Arduino, bem como o seu controlo direto. Neste último caso, apenas as funcionalidades dos pinos de entrada e saída do Arduino são aproveitadas, sendo o processamento dos dados realizado pelo computador. Esta interface é discutida em detalhe no capítulo 4.
EMG
Os sinais eletromiográficos são recolhidos através de dois sensores EMG (Figura 3.6), dispo-nibilizados no início da realização desta dissertação.
Este sensor possui uma placa integrada que, para além de obter o sinal bruto dos elétrodos, também amplifica, retifica e suaviza o sinal obtido, simplificando a sua integração no sistema. O esquema do circuito do sensor encontra-se na Figura A.1 dos anexos. Utiliza dois elétrodos para
3.3 Projecto
(a) Suporte superior
(b) Junta completa
(c) Suporte inferior
(d) Disco rotativo (e) Transdutor
potenciométrico
(f) Molas elásticas (g) Anilhas
Figura 3.5: Arduino Uno R1
aquisição do sinal EMG, mais um terceiro para obter uma referência, a ser colocado numa zona óssea, sendo seguidas as recomendações do SENIAM para a sua colocação.
Para os esforços de flexão e extensão do cotovelo foram escolhidos os músculos bicep e os tricep, respetivamente, devido à facilidade de aquisição de sinal, à sua importância na execução do movimento e ao seu uso com sucesso em trabalhos semelhantes (Rosen et al., 2001). Cada músculo utilizará um sensor.
Figura 3.6: Sensor EMG Muscle Sensor V3
Deflexão da mola
Para a medição da deflexão das molas é necessário a utilização de um transdutor linear de posição. Este transdutor irá medir a distância entre a base do suporte inferior e a anilha que suporta uma das molas, traduzindo o comprimento atual da mola. Este será depois comparado com o valor de comprimento inicial para se determinar a variação na força da mola.
Devido à importância que esta medição representa para o sistema, é crucial uma boa escolha deste componente. O atravancamento do componente deverá ser reduzido, para não interferir com o movimento da junta ou aumentar demasiado o peso do conjunto. Preferencialmente, o