tomografia por indução magnética / Foad Mobini Kesheh;
Orientador: Airton Ramos 107 f.: il ; 30cm
Incluem referências.
Dissertação (mestrado) – Universidade do Estado de Santa Catarina, Centro de Ciências Tecnológicas, Mestrado em Engenharia Elétrica, Joinville, 2011.
1. Tomografia. 2. Campo Magnético. 3. Detecção de fase. Ramos, Airton.
A Deus.
A minha família em especial minha mãe pelo incentivo.
Ao meu orientador Airton Ramos pela confiança e guia.
Ao colegiado pelo apoio.
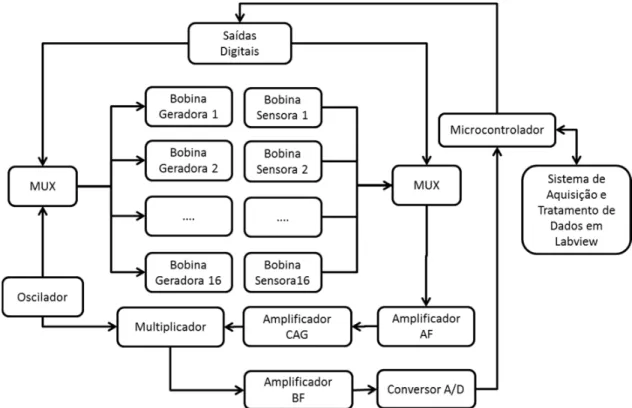
A tomografia por indução magnética é uma técnica que possibilita o mapeamento da condutividade de uma determinada região sem um contato elétrico. Essa técnica utiliza um gerador de campos magnéticos (geralmente uma bobina) para induzir
correntes em um objeto e vários sensores magnéticos (também usualmente
bobinas) que capturam o campo magnético gerado por essas correntes induzidas. As medidas obtidas por esses sensores podem ser usadas para construir uma imagem da condutividade no espaço no interior ao tomógrafo. A proposta desta dissertação é desenvolver um sistema eletrônico para tomografia por indução magnética. O principal objetivo é detectar o campo magnético gerado pelas correntes Eddy induzidas medindo o distúrbio provocado na fase dos sinais dos sensores quando um objeto condutivo é colocado no interior do tomógrafo. A frequência do sinal utilizado para excitação da amostra foi de 10,7 MHz. O sistema construído é capaz de medir a fase de uma combinação de bobina sensora e geradora de campo por vez. Para medir 16 sensores e controlar 16 geradores foram utilizadas técnicas de multiplexação. Toda a eletrônica construída foi analisada e os resultados são mostrados nesta dissertação. Também foram feitas medições utilizando um protótipo preliminar de tomógrafo e essas medidas foram comparadas às medidas realizadas utilizando osciloscópios e um sensor de campo magnético comercial. Para uma amostra de 1 S/m o erro médio quadrático máximo nas medidas quando comparadas com as simulações foi de 0,41°.
Magnetic induction tomography is a contactless conductivity imaging technique. This technique uses a magnetic field generator (usually a coil) to induce Eddy currents in the target object and several magnetic sensors (usually coils as well) that capture the magnetic field generated by these induced currents. The measurements obtained by these sensors can be used to construct a conductivity image of the space inside the tomograph. The purpose of this dissertation is to develop an electronic system for magnetic induction tomography. The main objective is to detect the magnetic field generated by the induced Eddy currents measuring the disturbance on the phase of the sensor’s signal when a conductive object is placed inside the tomograph. Coils were used as magnetic field sensors and generator. The frequency used to generate the excitation fields and also on phase detection circuit were 10.7 MHz. The system is capable to measure only one sensor and enable only one generator at a time. A system with 16 sensors and 16 generators was achieved through multiplexing. All the electronics were analyzed and results are shown on this dissertation. Also a preliminary tomograph prototype was build and some measurements were taken and compared to measurements done by commercial electromagnetic sensor and a scope. For a 1 S/m sample the average square error on the measurements compared to simulations was 0.41°.
#
TIM – Tomografia por Indução Magnética
TIEKAC – Tomografia de Impedância Elétrica com Aplicação de Corrente
TIEKIC – Tomografia de Impedância Elétrica com Indução de Corrente
TIE – Tomografia de Impedância Elétrica
CI – Circuito Integrado
ZFC – (Bobina de Fluxo Zero)
PGRAD – (Gradiômetro Planar)
ZFGRAD – (Gradiômetro de Fluxo Zero)
Msps – (milhões de amostras por segundo)
ksps – (milhares de amostras por segundo)
RF – Rádio Frequência
AWG – (Padrão americano de seções de fio)
CAG – Controle Automático de Ganho
AF – Alta Frequência
BF – Baixa Frequência
MUX – Multiplexador
CC – Corrente Contínua
CA – Corrente Alternada
AMPOP – Amplificador Operacional
$ %& '''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''$(
1.1 OBJETIVOS ... 14
1.2 OBJETIVO GERAL ... 14
1.3 OBJETIVOS ESPECÍFICOS ... 14
1.4 ESTRUTURA DO TRABALHO ... 15
( %& ) ''''''''''''''''''''''''''''''''''''''''''''''$* 2.1 DEFINIÇÃO DA TÉCNICA ... 16
2.2 TRABALHOS ANTERIORES ... 18
+ ) '''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''(, 3.1 SENSORES MAGNETOKGALVÂNICOS ... 28
3.2 MAGNETOMETROS ... 29
3.3 SENSORES ELETROMAGNÉTICOS... 32
3.3.1 Sensores Eletromagnéticos com Núcleo de Ar ... 33
3.3.2 Sensores Eletromagnéticos com Núcleo de Alta Permeabilidade ... 37
3.4 SQUIDS ... 40
- %. '''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''-( 4.1 MATERIAIS E MÉTODOS ... 42
4.2 RESULTADOS ... 46
4.3 DISCUSSÃO ... 47
/ 0 %& '''''''''''''''''''''''''''''''''''''''''''/$ 5.1 DETECÇÃO DE FASE ... 51
5.2 PRIMEIRA VERSÃO DA INSTRUMENTAÇÃO PARA TIM ... 52
5.2.2 Circuito de Controle Automático de Ganho ... 55
5.2.3 Circuito de Amplificador de Alta Frequência (AF) ... 56
5.2.4 Circuito de Amplificador de Baixa Frequência (BF) ... 59
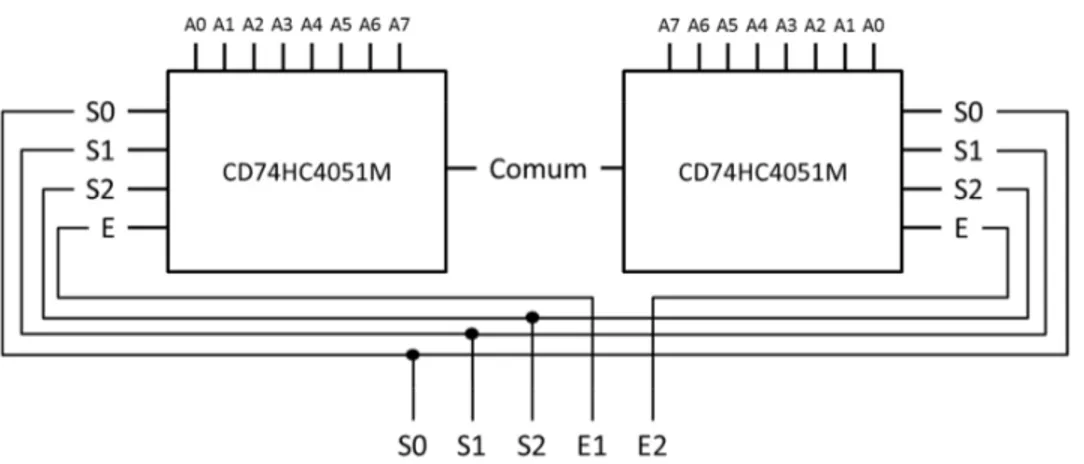
5.2.5 Circuito Multiplexador (MUX) ... 60
5.2.6 Bobinas Geradoras e Sensoras ... 62
5.2.7 Oscilador ... 63
5.2.8 Sistema de aquisição de dados ... 64
5.3 SEGUNDA VERSÃO DA INSTRUMENTAÇÃO PARA TIM ... 65
5.3.1 Relés para isolação das bobinas geradoras ... 67
5.3.2 Amplificador de Alta Frequência ... 67
5.3.3 Comparador ... 69
5.3.4 Redução de Campos Indesejáveis. ... 71
5.4 TERCEIRA VERSÃO DA INTRUMENTAÇÃO PARA TIM ... 71
5.4.1 Estágios de amplificação e limitação de amplitude ... 71
* & '''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''1* 6.1 PRIMEIRA VERSÃO DA INSTRUMENTAÇÃO PARA TIM ... 76
6.1.1 Resultados ... 76
6.1.2 Discussão ... 85
6.2 SEGUNDA VERSÃO DO TOMÓGRAFO ... 86
6.2.1 Resultados ... 86
6.2.2 Discussão ... 96
6.3 TERCEIRA VERSÃO DA INTRUMENTAÇÃO PARA TIM ... 99
6.3.1 Resultados ... 99
6.3.2 Discussão ... 102
1 . '''''''''''''$2+
$ %&
A determinação das características elétricas internas do corpo humano tem
importantes aplicações em biomedicina. Alguns exemplos de aplicações são
detecção de nódulos cancerígenos (ALKZEIBAK e SAUNDERS, 1993),
determinação do volume de sangue bombeado pelo coração (GUARDO,
CHARRON, , 1997) e a detecção de edemas cerebrais (SCHARFETTER,
LACKNER e ROSELL, 2001).
Ao longo dos anos, várias técnicas foram desenvolvidas com o intuito de
detectar as mudanças nas características elétricas do corpo humano em virtude
de condições patológicas. Alguns desses métodos têm objetivo de gerar imagens
do interior do corpo humano para diagnósticos médicos. Os métodos que
objetivam a geração de imagens do interior de um corpo de forma não invasiva
são chamados de tomografia. Os equipamentos utilizados para gerar essas
imagens são denominados tomógrafos.
Existem vários tipos de tomografia mencionados na literatura. Citaremos
neste trabalho, três tipos de tomografia baseadas nas características elétricas do
corpo humano: Tomografia de Impedância Elétrica com Aplicação de Corrente
(TIEKAC), Tomografia de Impedância Elétrica com Indução de Corrente (TIEKIC) e
Tomografia (de Impedância Elétrica) por Indução Magnética (TIM).
Na TIEKAC, correntes alternadas são aplicadas na superfície do corpo
humano através de um par de eletrodos. A tensão entre esses eletrodos é medida
determinando a impedância entre esses dois pontos. Algumas técnicas utilizam
diferentes eletrodos para a aplicação da corrente e medição da tensão (TIEKAC a
quatro fios) na superfície do corpo humano (GENÇER, IDER e WILLIAMSON,
1996).
Na TIEKIC, correntes alternadas são induzidas no corpo humano através de
campos magnéticos sem a necessidade de contato, enquanto a tensão resultante
dessas correntes é medida através de eletrodos posicionados na superfície do
corpo (GENÇER, IDER e WILLIAMSON, 1996). Em GENÇER, IDER e
WILLIAMSON, 1996 pode se encontrar um resumo das várias vantagens da
• Redução no número de eletrodos conectados no paciente, comparado
à TIEKAC que utiliza diferentes eletrodos para injeção de corrente e
medição de tensão;
• Sensores desenvolvidos com o propósito único de medir tensão. No
caso da TIEKAC a dois fios utilizaKse o mesmo eletrodo para injeção
de corrente e medição de tensão;
• Limitações de segurança quanto à densidade de corrente que pode
ser aplicada no corpo humano. Essa limitação leva a baixas tensões a
serem medidas degradando a relação sinalKruído;
• Problemas com a impedância de contato dos eletrodos com o corpo
humano são reduzidos na TIEKIC.
A tomografia de indução magnética é a técnica mais recentemente
desenvolvida e foco desta dissertação. A TIM teve seus primeiros resultados
publicados em 1992K3. Na TIM um campo magnético alternado é aplicado sobre o
objeto em estudo, induzindo correntes Eddy no mesmo. As correntes induzidas
geram o campo magnético secundário que é detectado por diversos sensores
espalhados ao redor do objeto. A maior vantagem da TIM em relação às técnicas
mostradas acima é o completo isolamento elétrico do corpo em teste, não sendo
necessário contato de nenhum tipo de eletrodo com o objeto em estudo
(GRIFFITHS, 2001).
456 $ 4 5 7 86 79:4 ! 7! : ;"! : < := ;4 " :!7!5 >4 ? ;: " @
A 86 : ! >4! BC ' : C C ? ;: 7 ? :4 7 ;: @
Nos três tipos de tomografia apresentados, algoritmos de reconstrução são
usados para produzir uma imagem a partir das características elétricas do
material a partir dos resultados obtidos nas medições. Para melhor
sistematização, a maioria dos métodos para reconstrução é dividida em duas
etapas: o problema direto e o problema inverso. No problema direto as tensões
são modeladas em função das impedâncias presentes no sistema. O problema
inverso consiste em inverter a relação obtida pelo problema direto e obter as
impedâncias (COHENKBACRIE, GOUSSARD e GUARDO, 1997).
Para resolver o problema direto em geral são utilizados métodos
computacionais como o método dos elementos finitos (MEF), método das
diferenças finitas (MDF), o método das impedâncias (MI) (RAMOS e WOLFF,
2011) ou, em alguns casos, técnicas de linearização (COHENKBACRIE,
GOUSSARD e GUARDO, 1997).
Para resolver o problema inverso em geral são utilizados critérios de
minimização e regularização, como por exemplo, a técnica de quadrados mínimos
e a regularização de Tikhonov.
1.1 OBJETIVOS
1.2 OBJETIVO GERAL
O objetivo geral desse trabalho é o desenvolvimento de instrumentação
para um tomógrafo por indução magnética planar, incluindo controle dos sinais
nas bobinas sensoras e geradoras e toda a instrumentação eletrônica necessária
para medir a amplitude dos sinais de campo secundário gerados pelas correntes
Eddy.
1.3 OBJETIVOS ESPECÍFICOS
1. Avaliar a influência da frequência na magnitude do campo secundário.
3. Definir um método para distinguir o sinal secundário a partir do sinal
medido.
4. Projetar e construir um sistema eletrônico completo para TIM.
5. Comparar os resultados obtidos pelo tomógrafo construído com medições
experimentais e simulações.
1.4 ESTRUTURA DO TRABALHO
O capítulo 1 introduz os principais conceitos para entender a tomografia por
indução magnética e apresenta os objetos do trabalho.
O capítulo 2 apresenta uma revisão bibliográfica sobre tomografia por
indução magnética.
O capítulo 3 trás uma revisão dos tipos de sensores magnéticos existentes,
e justifica a escolha dos sensores magnéticos utilizados posteriormente.
O capítulo 4 apresenta resultados experimentais obtidos utilizando um
sensor magnético comercial e um osciloscópio.
No capítulo 5 são apresentadas as etapas de projeto de cada um dos
blocos que formam o sistema de controle e aquisição de dados do tomógrafo.
O capítulo 6 mostra resultados obtidos pelo tomógrafo construído e
compara esses resultados com simulações e medições experimentais mostradas
no capítulo 4. Os resultados são discutidos e comparações são feitas entre o
tomógrafo construído e outros tomógrafos descritos na literatura.
Para finalizar, o Capítulo 6 traz as conclusões, bem como as propostas
2 TOMOGRAFIA POR INDUÇÃO MAGNÉTICA
Existem várias aplicações para as técnicas de tomografia principalmente na
indústria e na área médica. A tomografia baseada em propriedades elétricas tem
se mostrado mais barata do que outras técnicas de tomografia, provendo imagens
de suficiente nitidez para várias aplicações (PEYTON, BECK, et al., 1999).
2.1 DEFINIÇÃO DA TÉCNICA
Num tomógrafo de indução magnética, um campo magnético alternado é
aplicado numa amostra e, como consequência, correntes Eddy são induzidas na
amostra. Dá8se o nome campo primário ao campo que induz as correntes Eddy e
esse campo será representado pelo símbolo B0. As correntes Eddy no material
em estudo, por sua vez geram um campo magnético, também alternado,
chamado de campo magnético secundário, representado pelo símbolo ∆B.
Assume se que num tomógrafo em vazio o meio interno é homogêneo e
pode ser descrito como uma condutividade complexa κ = σ + jωε0εr. Quando um
objeto com uma condutividade complexa diferente deste meio (κ + ∆κ) é inserido
no meio interno ao tomógrafo, ele provoca uma perturbação ∆B devido as
correntes Eddy que irão ser induzidas no interior deste objeto. ∆B é então
detectado nos sensores posicionados ao redor da amostra provocando uma
variação de tensão complexa de ∆Vi. Nessa notação o índice i representa cada
combinação de sensor e gerador possível no sistema. Define8se também V0,i
como a tensão presente em uma determinada configuração de sensor e gerador
na ausência da amostra (SCHARFETTER, KOSTINGER e ISSA, 2008).
SCHARFETTER, KOSTINGER e ISSA, 2008 não consideram que a
amostra tenha uma variação na permeabilidade relativa o que geralmente é
verdadeiro para tecidos biológicos. GRIFFITHS, GOUGH, et al., 2007 apresentam
uma equação relacionando às três propriedades eletromagnéticas que a TIM é
∆
, = − 1 − + − 1
Equação 1
Na Equação 1, σ, εr e r representam a condutividade, a permissividade
relativa e a permeabilidade relativa do objeto, ε0 e 0 são a permissividade e a
permeabilidade do espaço livre e por fim, Q e R são constantes geométricas.
O objetivo da tomografia por indução magnética é medir a variação ∆Vi
provocada pela diferença da condutividade complexa (∆κ) do objeto em relação
ao meio e reconstruir uma imagem capaz de mostrar a posição e a condutividade
interna ao objeto.
Apesar de existirem aplicações de TIM no campo industrial, o
desenvolvimento de um tomógrafo de indução magnética para aplicações em
biomedicina trás muitos desafios a serem vencidos. O principal deles é a ordem
de grandeza da relação Δ V⁄ , que é da ordem de 0,01 para aplicações em
biomedicina (GRIFFITHS, 2001). Em aplicações industriais esses valores são da
ordem 0,25 (YU, PEYTON e BECK, 1994).
Um segundo desafio para a construção de tomógrafo por indução
magnética é o fato de que, idealmente, o acoplamento entre os sensores e os
geradores de campo deve ser puramente magnético. Na prática, porém, os
geradores de campo, além de gerarem um campo magnético, geram também um
indesejável campo elétrico. Esse campo elétrico através de acoplamentos
capacitivos chega aos sensores induzindo um sinal de ruído que se soma ao sinal
secundário. Como o sinal secundário é muito pequeno no caso de aplicações
biomédicas, o bloqueio do campo elétrico através de estratégias de blindagem é
fundamental (GRIFFITHS, GOUGH, et al., 2007).
Após a aquisição do sinal se iniciam os desafios computacionais da técnica
de tomografia. Como descrito anteriormente, para uma melhor sistematização das
técnicas de reconstrução de imagem o problema é dividido em duas partes. O
problema direto e o problema inverso. O problema direto consiste em definir a
relação entre as tensões induzidas nos sensores como função da condutividade
dos objetos inseridos no tomógrafo. Já o problema inverso trata de inverter a
relação gerada pelo problema direto para descobrir as condutividades no interior
imagem da condutividade. (COHEN8BACRIE, GOUSSARD e GUARDO, 1997)
Apesar de a TIM ser um campo de pesquisa recente, vários autores
reportaram sucesso na construção de tomógrafos por indução magnética.
Algumas dessas experiências serão descritas a seguir.
2.2 TRABALHOS ANTERIORES
Em 1999, GENÇER e TEK apresentaram um trabalho teórico sobre
TIM. O seu trabalho consistiu em resolver o problema direto e inverso através do
método de elementos finitos.
Nesse artigo um corpo de prova condutivo de dimensões 10 x 10 x 5 cm é
divido em elementos de malha de 1 x 1 x 1 cm. As bobinas sensoras e as bobinas
geradoras de campo estão dispostas como uma matriz bidimensional 7 x 7. Cada
bobina possui 1000 voltas e diâmetro de 1 cm.
As bobinas sensoras estão localizadas 0,5 cm acima do corpo e as bobinas
geradoras de campo estão 0,5 cm acima das bobinas sensoras. A condutividade
utilizada na simulação foi de 0,2 S/m, frequência de excitação de 50kHz e
corrente de excitação 1A. Na Figura 2 pode8se observar uma representação da
simulação apresentada no trabalho
Para a formulação do problema inverso GENÇER e TEK, 1999 geraram
uma matriz de sensibilidade (S). Essa matriz foi gerada energizando
individualmente cada uma das bobinas geradoras de campo, fazendo as
medições nas 49 bobinas sensoras de campo e calculando as correntes em cada
um dos 500 elementos da malha.
Para resolver o problema inverso, GENÇER e TEK, 1999 utilizaram o
método de Newton8Raphson e linearizaram as equações de condutividade ao
redor da região de condutividade estimada para o problema. O problema foi
resolvido fazendo uma pseudo8inversão da matriz S gerando uma imagem da
condutividade do corpo de prova.
Para testar o problema inverso, GENÇER e TEK, 1999 alteraram a
condutividade de um dos elementos da malha e variaram a profundidade deste
elemento dentro da amostra. Na Figura 3 pode se observar uma das imagens
publicadas no trabalho.
Figura 3 Imagem reconstruída para uma perturbação em um único elemento da malha. Neste caso específico o elemento está 2,5 cm abaixo da superfície do corpo. Adaptado de GENÇER e TEK, 1999.
Também em 1999, PEYTON, BECK, et al. reportaram a construção
de um tomógrafo por indução magnética para aplicações industriais. Esse
tomógrafo consistia de uma série de bobinas sensoras e geradoras de sinal,
dispostas ao redor de um cilindro. No sistema também existia uma circuito de
imagem da distribuição espacial da condutividade ou permeabilidade magnética
utilizando8se de algoritmos de reconstrução. Ver a Figura 4.
Figura 4 Diagrama em blocos de um sistema de TIM. Adaptado de PEYTON, BECK, , 1999.
Ainda com respeito ao tomógrafo construído vale registrar que a matriz de
sensores era composta por uma blindagem magnética externa, bobinas geradoras
e sensoras, drivers de corrente para cada bobina geradora (um por bobina),
amplificadores e buffers de sinal para cada bobina sensora. Segundo PEYTON,
BECK, et al., 1999 essa blindagem tinha a função de evitar interferência de
objetos condutores externos ao tomógrafo, reduzir a susceptibilidade a campos
magnéticos externos e prover um caminho fechado para o campo magnético das
bobinas geradoras.
O circuito de detecção de sinal consistia em um amplificador de ganho
programável e dois multiplicadores (baseados no circuito integrado AD734)
utilizados para detectar a amplitude do sinal em fase com a excitação e a
amplitude do sinal em quadratura. No caso, a saída dos multiplicadores foi filtrada
por um filtro passa baixas de terceira ordem Butterworth com frequência de corte
de 5kHz. O sinal filtrado foi adquirido por um conversor analógico digital de 12
bits. Nota8se nesse sistema a ausência de preocupação com o acoplamento
capacitivo entre bobinas geradoras e sensoras, e isso se deve principalmente às
condutividades e permeabilidades magnéticas a serem medidas que são
significantemente maiores do que nas aplicações biomédicas. O artigo cita
condutividades típicas a serem medidas entre 102 e 107 S/m e permeabilidades
relativas entre 100 e 104. Como o sistema conseguia medir tanto a parte real e a
parte imaginária do sinal adquirido pelos sensores, pressupõe8se a possibilidade
magnética do meio, porém no caso deste artigo o interesse é medir a
permeabilidade magnética.
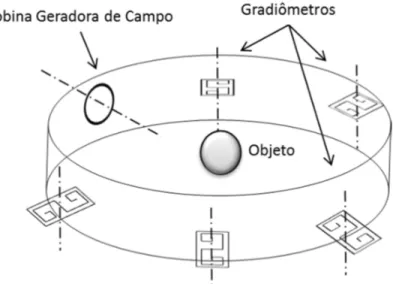
Em 2001, SCHARFETTER, LACKNER e ROSELL descreveram um
tomógrafo por indução magnética capaz de medir condutividades na faixa de
interesse da biomedicina (Condutividades de 0,1 a 0,7 S/m) numa faixa de 10kHz
a 10MHz. Para conseguir medir esses níveis de condutividade, os autores
propuseram a utilização de gradiômetros (Ver Figura 5) para reduzir ao máximo o
sinal primário captado pelos sensores. Em seguida o sinal em seguida passa por
um detector de fase que cancela o resíduo do sinal primário e, através de um
multiplicador e de um filtro passa8baixas, provê um sinal de corrente contínua
proporcional à fase do sinal medido no sensor.
O trabalho não contempla a construção de imagens. O foco do trabalho foi
a comparação de um gradiômetro planar com uma simples bobina sensora. Não
são citados nesse trabalho informações sobre os aspectos construtivos do
tomógrafo, como blindagens e também se observa que o foco principal do
tomógrafo é mapear a condutividade, diferentemente do trabalho de PEYTON,
BECK, et al., 1999 que visa medir tanto a condutividade quanto a permeabilidade
magnética. Isso se deve ao fato de a permeabilidade magnética dos tecidos
biológicos ser muito próxima à permeabilidade magnética do vácuo, não havendo
interesse em medir essa diferença no caso de aplicações biomédicas.
Figura 5 Esquemático de um sistema composto por uma bobina geradora e um gradiômetro planar apresentado por SCHARFETTER, LACKNER e ROSELL, 2001.
Alguns anos depois SCHARFETTER, MERWA e PILZ, 2005 propuseram
pelo sensor utilizando técnicas como posicionamento dos sensores em relação às
bobinas geradoras de campo e gradiômetros. Na primeira proposta as bobinas
são posicionadas de modo que o fluxo magnético devido ao campo primário seja
zero (ZFC – Zero Flux CoilI) . Ver Figura 6. As outras duas propostas foram o
gradiômetro planar (PGRAD – Planar Gradiometer) mostrado na Figura 7 e o
gradiômetro planar posicionado de modo com que o fluxo de campo primário seja
nulo (ZFGRAD – Zero Flux Planar Gradiometer) apresentado na Figura 8.
Figura 6 Diagrama esquemático do ZFC. Adaptado de SCHARFETTER, MERWA e PILZ, 2005.
Figura 8 Diagrama esquemático do ZFGRAD. Adaptado de SCHARFETTER, MERWA e PILZ, 2005.
No artigo, a relação sinal8ruído de cada uma das configurações é
comparada e também são apresentados mapas de condutividade gerados através
de algoritmos de reconstrução. Segundo o artigo, o ZFC é susceptível a ruídos
devido a campos magnéticos distantes e o PGRAD não consegue anular o campo
magnético primário devido a variações mecânicas no gradiômetro. A contribuição
do artigo foi construir um sistema capaz de combinar as vantagens do ZFC
(anulação do campo primário) e do PGRAD (anulação dos ruídos causados por
campos distantes). O ZFGRAD se mostrou 12 vezes menos susceptível a ruídos
distantes quando comparado ao ZFC, porém o ZFC foi o sistema que apresentou
maior sensibilidade.
No mesmo curso, SCHARFETTER, KOSTINGER e ISSA, 2008
propuseram um novo sistema capaz de realizar medições simultâneas em 8
canais de leitura e comando de 8 bobinas geradoras (o sistema possui no total 16
bobinas geradoras e 16 bobinas sensoras utilizando multiplexação para ler e
comandar todos os canais), com o intuito de reduzir erros induzidos nas medições
devido às vibrações mecânicas e de temperatura dos componentes. Os sensores
são gradiômetros planos. Nesse sistema, são injetados três sinais em diferentes
frequências na amostra simultaneamente com espaçamento espectral de 300 Hz.
Os sinais adquiridos pelos sensores não sofrem nenhum tipo de redução de
sinal medido através de transformadas de Fourier. O sistema utiliza uma taxa de
aquisição de até 60 Msps com resolução de 12 bits, trabalhando com frequências
de excitação da amostra de 50kHz a 1,5MHz. O amplificador para o sinal das
bobinas geradoras foi realizado utilizando um estágio pré8amplificador com o
circuito integrado AD811 e um estágio de potência com circuito integrado PA19.
As bobinas sensoras utilizam dois estágios de amplificadores, o primeiro baseado
no circuito integrado AD797 e o segundo utilizando o circuito integrado MAX4147
resultando num ganho de 37,5 V/V.
Para testar o sistema se aplicou uma vibração mecânica de 100 Hz ao
sistema e se verificou a influência dessa vibração. Como conclusões de
SCHARFETTER, KOSTINGER e ISSA, 2008 pode8se destacar que as vibrações
mecânicas afetam principalmente a parte real do sinal secundário, porém se
notou uma tendência linear responsável por 25% da flutuação da saída, mas
suspeita8se no artigo que ela se deva a variações térmicas nos componentes.
ROSELL8FERRER, MERWA, et al., 2006 publicaram resultados mostrando
um protótipo de tomógrafo de múltiplas frequências constituído de uma bobina
geradora de sinal e 14 gradiômetros como sensores de sinal. Uma foto do
protótipo pode ser vista na Figura 9.
Figura 9 Protótipo de tomógrafo apresentado por ROSELL FERRER, MERWA, , 2006.
Esse sistema funcionava com frequências de 50kHz a 1MHz e não utiliza
sensores não era convertido para uma frequência menor. O sinal era apenas
amplificado e digitalizado por duas placas da National Instruments NI86115 de 12
bits a uma frequência de amostragem de 5 Msps. Cada placa possui 4 canais de
aquisição de sinal e através de multiplexação adquiria8se o sinal dos 14 canais.
Um esquemático do sistema de aquisição é mostrado na Figura 10.
Figura 10 Circuito amplificador dos 14 gradiômetros e do sinal de referência ROSELL FERRER, MERWA, , 2006.
O sinal de cada canal é adquirido por 20 milissegundos. Após a aquisição
de todos os sinais a amostra é rotacionada e os sinais são adquiridos novamente.
O tempo de aquisição de todos os canais, rotação da amostra e processamento é
de 400 milissegundos. O sinal de uma bobina de referência é utilizado para o
calculo da parte real e imaginária dos sinais adquiridos, esta bobina está
localizada no lado oposto da bobina geradora.
Para a reconstrução da imagem o método de elementos finitos proposto
por MERWA, HOLLAUS, et al., 2005 foi utilizado. O sistema foi capaz de detectar
pequenas perturbações (20% do diâmetro do tomógrafo) na faixa de
condutividade biológica (da ordem de poucos S/m). ROSELL8FERRER, MERWA,
et al., 2006 propõem que para reduzir os erros, provocados pela falta de
estabilidade dos sinais medidos, um sistema capaz de ler todos os sensores do
tomógrafo simultaneamente seria o ideal. O trabalho também propõe o uso do
VAUHKONEN, HAMSCH e IGNEY, 2008 apresentaram um tomógrafo de
16 canais funcionando a uma frequência de 10 MHz. No sistema mostrado, o
tomógrafo possui uma dupla blindagem metálica contra perturbações externas.
Para facilitar a aquisição do sinal captado pelos sensores, uma translação na
frequência do sinal era feita, reduzindo sua frequência para 10 kHz. Após isso os
sinais eram adquiridos por equipamentos para aquisição de sinais de áudio (192
ksps com 24 bits de resolução). O diagrama em blocos do sistema é mostrado na
Figura 11.
Figura 11 Diagrama em blocos do sistema de condicionamento de sinal das bobinas receptoras (a) e do sistema de amplificação de sinal das bobinas geradoras (b). Adaptado de VAUHKONEN, HAMSCH e IGNEY, 2008.
Para o circuito de condicionamento de sinal, o amplificador de rádio
frequência utilizado é baseado no AD8099 (Analog Devices) devido ao seu baixo
ruído. O sinal da frequência de conversão é amplificado utilizando o AD8056
(Analog Devices). O multiplicador (Mixer) utilizado para fazer a translação na
frequência foi o ADE86 (Mini Circuits). A saída é filtrada e amplificada por um
circuito baseado no AD8056 com filtragem no laço de realimentação
(VAUHKONEN, HAMSCH e IGNEY, 2008).
No circuito gerador de sinal os pré8amplificadores foram baseados no
AD826 (Analog Devices) e o amplificador de potência utilizado é baseado no
THS3096 (Texas Instruments) e no BUF634 (Texas Instruments) (VAUHKONEN,
HAMSCH e IGNEY, 2008).
Para a solução do problema direto foi utilizado um método de elementos
finito proposto por MONK, 2003. Para o problema inverso foram utilizadas
técnicas de linearização e regularização, e a solução final foi obtida através do
sinais e gerar uma imagem em 20 segundos. Na Figura 12 podem ser observadas
imagens geradas pelo sistema e por simulação.
Figura 12 Reconstrução de imagem apresentada por VAUHKONEN, HAMSCH e IGNEY, 2008. Em (a) pode se ver o tomógrafo com quatro amostras posicionadas com condutividades de 0,5 S/m (topo), 0,75 S/m (esquerda), 1 S/m (abaixo) e 1,25 S/m (esquerda). Em (b) pode ser ver a reconstrução da imagem utilizando os dados medidos experimentalmente e em (c) a reconstrução da imagem utilizando os dados obtidos pelo método de elementos finitos.
As técnicas de tomografia por impedância elétrica utilizam uma
metodologia similar para geração de imagens bidimensionais e tridimensionais a
partir das leituras de resistividade elétrica de um determinado tecido utilizando
eletrodos (problema direto e problema inverso). As técnicas de tomografia por
impedância elétrica são mais antigas e maduras que as técnicas de tomografia
por indução magnética. Todos os artigos de TIM expostos neste trabalho são
bidimensionais enquanto em TIE já existem artigos publicados de tomógrafos
tridimensionais com datas anteriores a 1996. Em TIE o número de eletrodos
aplicando corrente no tecido e fazendo leituras de tensão também é superior aos
números reportados me TIM, e por consequência, a resolução dos tomógrafos por
impedância elétrica também é maior. Um exemplo de TIE tridimensional pode ser
encontrado em METHERALL, BARBER, et al., 1996. Neste artigo os autores
apresentam um tomógrafo tridimensional formado por 32 eletrodos de injeção de
corrente e 32 eletrodos de leitura de tensão dispostos em 4 planos distintos. Os
autores também reportaram uma resolução 10 a 12,5% do diâmetro do tomógrafo
apresentando no artigo resultados experimentais e simulações com uma boa
3 SENSORES MAGNÉTICOS
Neste capítulo são descritos diversos tipos de sensores magnéticos, suas
características e aplicações. Definem8se como sensores magnéticos os sensores
que têm relação com as leis e efeitos de campos magnéticos ou eletromagnéticos
(BOLL, 1989).
Existem diversas classes de sensores magnéticos. As seguintes
classes de sensores foram selecionadas para um estudo mais aprofundado:
• Sensores magneto8galvânicos;
• Magnetometros;
• Sensores eletromagnéticos;
• SQUIDS.
3.1 SENSORES MAGNETO8GALVÂNICOS
Os sensores magneto8galvânicos são baseados no efeito magneto8
galvânico que ocorre em semicondutores. Esse efeito ocorre devido à interação
entre um campo magnético aplicado a um material e a corrente que está fluindo
no interior do mesmo. Os dois efeitos magneto8galvânicos mais importantes são o
efeito hall e o efeito magneto8resistivo (também conhecido como efeito
Thompson). Esses efeitos são observados basicamente em semicondutores, pois
ocorrem em materiais com alta mobilidade de portadores de carga e baixa
concentração de cargas livres (OVERSHOTT, 1989).
O efeito magneto8resistivo baseia8se na deflexão dos portadores de cargas
livres devido à força de Lorentz que age perpendicularmente à direção do
movimento da carga e da densidade de fluxo magnético. A rotação da direção da
corrente e a colisão com a estrutura cristalina do material resultam num aumento
do caminho que a corrente percorre no interior do material. Esse aumento do
caminho resulta em um aumento na resistividade do material, gerando assim o
O efeito hall também se baseia na interação entre campo magnético e
corrente, determinada pela força de Lorentz. Considere um semicondutor plano e
longo percorrido por uma corrente. Um campo magnético normal ao plano e a
corrente faz com que os portadores de cargas livres alterem o caminho original e
se concentrem em uma das extremidades desse condutor. Essa diferença de
concentração de cargas no interior do semicondutor gera um campo elétrico
perpendicular à corrente e o campo magnético. Esse campo elétrico também
pode ser entendido como uma forma de compensar a força de Lorentz mantendo
um caminho retilíneo para a corrente. O efeito tangível e mensurável desse
campo elétrico é uma tensão proporcional à corrente que atravessa o
semicondutor e o campo magnético a que o condutor foi submetido
(OVERSHOTT, 1989).
O efeito magneto8resistivo e o efeito hall coexistem, já que ambos são
baseados na interação da corrente com o campo magnético. Basicamente, é a
geometria do sensor que define qual dos efeitos será predominante. Os sensores
magneto8resistivos são especialmente construídos de forma a inibir ao máximo
que a tensão hall apareça, pois ela tende a manter a direção original da corrente
(HEIDENREICH e POPOVIC, 1989).
Figura 13 – Exemplo de diferenças geométricas entre sensores magneto resistivos (A) e sensores de efeito hall (B).
3.2 MAGNETOMETROS
Magnetometros utilizam propriedades específicas de um campo de
referência para converter um campo magnético a ser medido em um sinal elétrico.
A presente descrição é focada em magnetometros que avaliam a assimetria do
magnetização do núcleo do sensor e à sobreposição de um sinal magnético
externo a ser medido. Uma das técnicas para medir essa assimetria do sinal é o
princípio da segunda harmônica, que será o foco desta seção (BORNHOFFT e
TRENKLER, 1989).
Esse tipo de magnetometro é composto por um núcleo de material
altamente saturável e pelo menos duas bobinas, uma de magnetização primária e
uma segunda bobina de sensoriamento, que são usados para medir campos
magnéticos contínuos ou de baixa frequência. Um exemplo de construção pode
ser encontrado na Figura 14 (BORNHOFFT e TRENKLER, 1989).
Figura 14 Representação de um magnetometro de harmônica secundária (Flux Gate)
O núcleo do sensor é periodicamente levado à saturação pelo campo
gerado na bobina de magnetização primária (HREF). Quando não existe um campo
magnético externo ao sensor, (HEXT=0) e o fluxo magnético no núcleo não é
senoidal e apresenta achatamento nas regiões de máximo positivo e negativo
Figura 15 Fluxo magnético interno ao núcleo (BINT) e o campo de referência (HREF) .
Na presença de um campo externo (HEXT), o fluxo magnético dentro do
núcleo acaba sendo deslocado para o lado positivo ou negativo, resultando num
maior achatamento em uma dessas regiões e um menor achatamento na região
oposta, veja Figura 16.
Figura 16 Fluxo magnético interno ao núcleo (BINT) na presença do campo de referência
(HREF) e um campo externo positivo (HEXT)
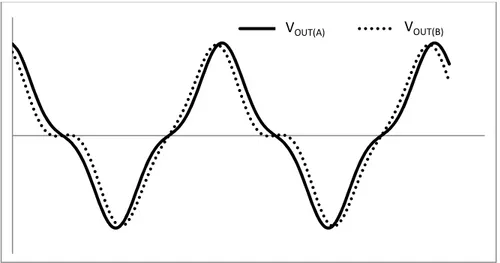
A tensão de saída na bobina sensora é proporcional à derivada do fluxo
magnético (BINT) no interior do núcleo, com a presença VOUT(B) ou a ausência do
campo externo VOUT(A) esse sinal muda como mostrado na Figura 17.
Se for realizada uma análise usando a transformada de Fourier no sinal
VOUT(A) se encontrará apenas sinais de harmônicas ímpares como, por exemplo,
a primeira e a terceira harmônica. Porém, com a adição do campo externo (HEXT),
HREF BINT
outras não linearidades são provocadas no sinal VOUT(B), e essas novas não
linearidades fazem surgir harmônicas pares e ímpares no sinal (BORNHOFFT e
TRENKLER, 1989).
Figura 17 Tensão de saída na bobina sensora: VOUT(A) sem a presença do campo externo;
e VOUT(B) com a presença do campo externo.
O sinal da segunda harmônica do sinal VOUT(B) é proporcional ao campo
magnético externo (HEXT) segundo a equação abaixo:
= !" . $. %&' 2. . ) Equação 2
Onde K é uma constante de proporcionalidade e ω é a frequência angular
do campo de referência HREF.
3.3 SENSORES ELETROMAGNÉTICOS
Os sensores eletromagnéticos são os sensores magnéticos mais simples
que existem e têm seu princípio físico baseado na Lei de Faraday:
* +. ,% = −,) - .. ,/,
0
Equação 3
A tensão induzida nos caminhos fechados de uma bobina é proporcional à
variação temporal do fluxo magnético que atravessa a mesma (DEHMEL, 1989).
Existem basicamente duas classes de sensores eletromagnéticos: os com
núcleo de ar e os com núcleos ferromagnéticos. Ambos podem ser construídos
para serem rígidos e resistentes ao ambiente. Os requerimentos para os circuitos
eletrônicos, no qual esses sensores são conectados, também são poucos,
basicamente apenas amplificadores com baixo ruído são necessários (DEHMEL,
1989).
3.3.1 Sensores Eletromagnéticos com Núcleo de Ar
O sensor eletromagnético com núcleo de ar representa a mais fundamental
forma de sensor magnético, não tem grande complexidade de produção e, se
bem projetado pode atender altos requisitos de desempenho. Essa classe de
sensores pode ser usada tanto para medir campos magnéticos como também
para gerá8los. Outra característica muito importante deste tipo de sensor é a não
utilização de nenhum tipo de material magnético e, portanto, também não
possuem não linearidades inerentes dos materiais magnéticos podendo, em
princípio, medir qualquer amplitude de campo magnético. Além disso, usando dois
sensores em série pode8se criar uma configuração chamada de gradiômetro,
capaz de cancelar os ruídos presentes no ambiente, facilitando a detecção de
pequenos gradientes de campo local (DEHMEL, 1989).
Uma desvantagem deste tipo de sensor reside no fato de que para atingir
altas sensibilidades, as bobinas devem ter dimensões grandes e por
consequência um peso elevado. Isso também resulta em uma baixa resolução
espacial se campos magnéticos não homogêneos precisam ser medidos, pois o
sensor fornece um valor médio do campo que atravessa sua área geométrica.
(DEHMEL, 1989).
Se o sensor for usado somente para medir campos magnéticos,
geralmente são necessárias blindagens eletrostáticas. Porém essas blindagens
precisam ser cuidadosamente projetadas, pois elas reduzem a sensibilidade do
blindagem reduz a largura de banda do sensor devido ao aumento do
acoplamento capacitivo dos enrolamentos (DEHMEL, 1989).
Para calcular a sensibilidade de um sensor eletromagnético com núcleo de
ar, se utilizará o diagrama da Figura 18. Uma bobina de n voltas, de diâmetro D e
área A é atravessada por um campo magnético H uniforme, senoidal e na direção
normal a bobina. Esse campo tem frequência angular ω e amplitude H0
(DEHMEL, 1989).
Figura 18 Representação esquemática de uma bobina utilizada para medição de campo magnético. Os círculos marcados com um “X” representam o campo magnético uniforme H saindo do plano da folha.
A tensão induzida 1 na bobina pode ser descrita pela equação abaixo
desde que a frequência ω seja suficientemente pequena para que o acoplamento
capacitivo e o efeito indutivo da bobina possam ser desprezados:
1 = −'. ,2 ,)3 , Equação 4
onde φ é o fluxo magnético que atravessa a bobina. Como o campo é
senoidal, o fluxo magnético pode ser descrito pela seguinte equação:
Se chamarmos de U0 o pico de tensão u induzida na bobina, chega8se na
Equação 9.
8 = . '. 240" Equação 6
8 = . '. . . / Equação 7
8 =2. 9. :. '.4 . .9. ; Equação 8
8 ==>. '. ; . . :. , Equação 9
onde ]0 é a permeabilidade absoluta do vácuo, que é praticamente a
mesma que do ar (4. 9. 10@A B /. C⁄ ).
A figura de sensibilidade foi definida como:
D = 8 =92 . . '. ; . : Equação 10
Como se pode observar na equação acima, a sensibilidade da bobina
depende construtivamente apenas do número de espiras da mesma e seu
diâmetro. A sensibilidade também aumenta proporcionalmente com a frequência.
A equação acima pode ser utilizada apenas para baixas frequências. Para
frequências maiores deve se utilizar o circuito equivalente do sensor (Figura 19)
formado por um indutor, um capacitor, duas resistências e uma fonte de tensão.
A indutância pode ser calculada por diversas fórmulas que podem ser
encontradas em (DEHMEL, 1989). Para uma bobina curta, onde diâmetro da
bobina é muito maior que o comprimento da bobina, de ' espiras com uma
camada de fios de altura h e diâmetro de fio d, a indutância é calculada da
seguinte maneira (todas as dimensões em centímetros):
E = 78,7. ; . ' 3; + 9', + 10ℎ3 ' Equação 11
A capacitância representa a capacitância distribuída entre as voltas que formam a
bobina e as diversas camadas. Descrever uma fórmula para a capacitância é um
trabalho complexo, pois ela depende de muitos fatores construtivos. O ideal é
medir essa capacitância. Em geral, a capacitância aumenta com o comprimento w
da bobina e com o diâmetro D da bobina e diminuí com o aumento do número de
camadas de espiras, o que pode ser indiretamente medido pela altura ℎ das
camadas de fio (DEHMEL, 1989):
K~ M. ; ℎ3 Equação 12
A resistência de corrente contínua (Rcc) é calculada pela lei de Ohm e
depende unicamente do comprimento do fio, do diâmetro do fio e da resistividade N do material:
OO = 4. N. '. ; ,3 Equação 13
A resistência de corrente alternada (Rca) depende principalmente de dois
fenômenos que ocorrem em alta frequência: o efeito pelicular e o efeito de
proximidade. O efeito pelicular se deve ao fato da corrente se concentrar na
periferia do condutor, sendo assim a corrente encontra maior resistência a sua
passagem. Já o efeito de proximidade se deve ao fato de uma espira estar
próximo a outra, fazendo com que as correntes que circulam numa espira
complexa relação entre fatores construtivos da bobina que impossibilita criar uma
equação para um cálculo acurado de Rca. Sabe8se que é possível reduzir o efeito
pelicular reduzindo o diâmetro do fio (d) e o efeito de proximidade pode ser
reduzindo aumentando o espaçamento entre os fios ou fazendo bobinas curtas.
Em bobinas com alta densidade de fios o efeito de proximidade pode ser dezenas
de vezes maior que o efeito pelicular (DEHMEL, 1989).
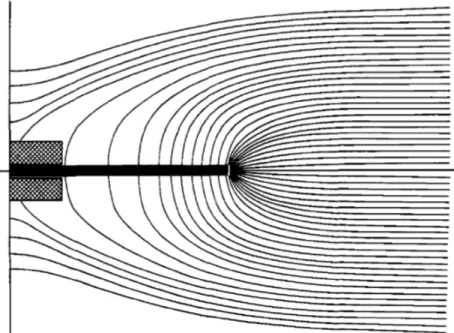
3.3.2 Sensores Eletromagnéticos com Núcleo de Alta Permeabilidade
Os núcleos de alta permeabilidade têm a capacidade de concentrar o fluxo
magnético dentro de si como mostra a Figura 20.
Figura 20 Distorção nas linhas de um campo magnético uniforme quando inserido um núcleo de alta permeabilidade. Adaptado de DEHMEL, 1989.
Essa capacidade de concentrar o fluxo magnético aumenta a sensibilidade
do sensor drasticamente, reduzindo seu peso e tamanho, e isso é uma das
principais vantagens do uso de núcleos de alta permeabilidade. Por outro lado, o
projeto do sensor se torna complexo pois a permeabilidade do núcleo depende de
ferromagnético que são dependentes da frequência e inerentemente não lineares
(DEHMEL, 1989).
Para uso em altas frequências os núcleos devem ser finos ou laminados,
pois existe o efeito pelicular magnético provocado pelas correntes Eddy no interior
do material ferromagnético. A frequência crítica (:P) para um material de
permeabilidade relativa ( ) e espessura de laminação ()) devido às correntes
Eddy pode ser calculada pela formula abaixo:
:P = 4 9.) . . .3 Equação 14
Esse efeito pode ser reduzido com o uso de núcleos de ferrite, pois os
mesmos possuem uma condutividade baixa (DEHMEL, 1989).
A sensibilidade de um sensor eletromagnético com núcleo de alta
permeabilidade de diâmetro (;P ) pode ser calculada pela equação abaixo:
D = =8 92 . . Q. '. ;P. : Equação 15
A permeabilidade efetiva ( Q) do núcleo difere da permeabilidade relativa
do material do núcleo ( ), pois considera o fator de desmagnetização N, que
varia entre zero e um. O fator de desmagnetização reduz o valor da
permeabilidade efetiva do núcleo.
Q= 1 + R + 1 Equação 16
A Equação 15 difere da equação dos sensores com núcleo de ar pela
inclusão da permeabilidade efetiva do núcleo ( Q) e pela substituição do diâmetro
da bobina pelo diâmetro do núcleo de alta permeabilidade. Como a
permeabilidade efetiva do núcleo pode chegar à casa de centenas, os sensores
com núcleos de alta permeabilidade conseguem ser centenas de vezes mais
Um ponto construtivo que vale ser ressaltado a respeito desses sensores é
o posicionamento da bobina em relação ao núcleo de alta permeabilidade. A
bobina deve ficar preferencialmente no centro do comprimento do núcleo e deve
ter de preferência metade do comprimento do núcleo para atingir máxima
eficiência na detecção de sinal (DEHMEL, 1989).
No circuito equivalente (Figura 21), além dos elementos já mostrados para
os sensores com núcleo de ar, dois novos elementos devem ser adicionados, um
para representar as perdas por correntes Eddy no núcleo (Re) e outro para
representar as perdas por histerese no núcleo (Rh) (DEHMEL, 1989).
No caso de núcleos de alta permeabilidade, a indutância depende da
permeabilidade do núcleo e de uma série de outros fatores que influenciam na
distribuição do fluxo magnético dentro do núcleo, sendo difícil de estimá8la com
precisão, porém uma aproximação pode ser obtida utilizando a seguinte equação:
E S1,26. ' . /U P. . 10@V Equação 17
Onde /P é a área do núcleo em centímetros quadrados e U é o
comprimento do núcleo (DEHMEL, 1989).
Figura 21 Circuito equivalente de um sensor eletromagnético utilizando núcleo de alta permeabilidade. U é a tensão efetivamente medida na bobina.
O cálculo da capacitância equivalente leva em conta as mesmas
considerações feitas para os sensores com núcleo de ar, porém deve8se adicionar
o efeito da capacitância distribuída entre a bobina e o núcleo do sensor. Se o
núcleo for curto circuitado a uma das extremidades da bobina, essa capacitância
KW =2. . . M. 9. ;3 ; − ; P
Equação 18
Onde é a permissividade relativa do dielétrico utilizado, é a
permissividade do vácuo, M é o comprimento e ; é o diâmetro da bobina
(DEHMEL, 1989).
Devido a suas menores dimensões em relação aos sensores com núcleo
de ar com mesma sensibilidade, Rcc e Rac também são menores e as mesmas
considerações utilizadas para sensores com núcleo de ar podem ser utilizadas
aqui (DEHMEL, 1989).
As perdas por correntes Eddy (Re) são proporcionais ao quadrado da
frequência e podem ser reduzidas utilizando laminações mais finas no núcleo. Já
as perdas por histerese (Rh) são proporcionais a frequência e podem ser
desconsideradas se o material do núcleo for adequado para a frequência de
operação do sensor (DEHMEL, 1989).
3.4 SQUIDS
Os sensores SQUID são baseados em propriedades presentes em
materiais supercondutores. A supercondutividade ocorre em temperaturas baixas
e é caracterizada pela perfeita condução de corrente, sem nenhuma perda,
expulsão completa do fluxo magnético (efeito Meissner), quantização do fluxo
magnético, entre outros (KOCH, 1989).
Josephson descobriu que quando dois supercondutores estão separados
por uma película isolante fina o suficiente, surge através da junção destes
supercondutores um acoplamento quântico que provoca um efeito túnel que
habilita que uma corrente elétrica proporcional à diferença de fase entre os dois
supercondutores atravesse a película isolante. Esse efeito, conhecido como efeito
Josephson é a base para este tipo de sensor (OVERSHOTT, 1989).
Os sensores SQUID são os sensores magnéticos mais sensíveis já criados
atingindo a resolução da ordem de femto8Teslas. Eles são tão sensíveis que
podem ser afetados por muitas fontes de ruído incomuns, presentes em toda a
vibrações de prédios, atividades solares, interferências de rádio, radares, trens de
metrô (KOCH, 1989).
As principais aplicações dos sensores SQUID são medição de campos
emitidos pelo corpo humano (principalmente cérebro e coração), sensores para
aparelhos de ressonância magnética, prospecção de óleo, minerais, previsão de
terremotos, prospecção de fontes de energia geotérmica, sensores de movimento
4 MEDIÇÕES PRELIMINARES
Nesta seção, a sensibilidade na detecção do campo secundário em um
sistema TIM será avaliada por métodos numéricos e experimentais para um
objeto com baixa condutividade e como função da frequência de excitação. Os
resultados obtidos servirão de base para o projeto otimizado de um sistema de
tomografia para detecção de condutividades na faixa de interesse da biomedicina.
Segundo a Lei de Faraday as correntes Eddy induzidas no material estão
defasadas do campo magnético primário em 90º e por consequência o campo
magnético secundário também está defasado em 90º em relação ao campo
primário. Qualquer sensor de campo magnético detectará o campo total obtido
pela soma do campo primário e do campo secundário. O campo resultante,
portanto, estará defasado em relação ao campo aplicado. Medindo8se esta
defasagem, que no caso de objetos de baixa condutividade é muito pequena,
pode8se obter o valor do campo secundário.
Trabalhos anteriores mostram que frequências de excitação na faixa de
kHz até no máximo 20 MHz (SCHARFETTER, LACKNER e ROSELL, 2001;
GRIFFITHS, 2001) vêm sendo usadas nos estudos de TIM, na maioria utilizando
uma única frequência para medições. Pretende8se neste estudo observar o
comportamento de um sistema TIM submetido à variação da frequência na faixa
entre 1 e 20 MHz. Esta faixa foi escolhida principalmente devido à escassez de
estudos realizados nestas frequências, e por elas terem se demonstrado
especialmente interessantes devido ao maior valor de campo secundário gerado
em frequências mais elevadas e pelo fato da complexidade da instrumentação
eletrônica necessária para medição do campo secundário não ser tão elevada
nessa faixa de frequências.
4.1 MATERIAIS E MÉTODOS
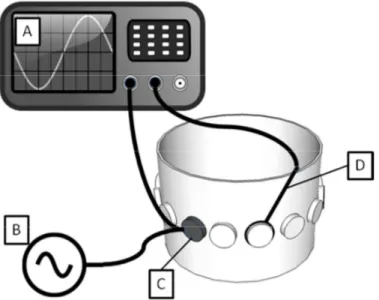
Para a realização dos experimentos montou8se um protótipo com uma
AWG (American Wire Gauge) e 15 pontos de sensoriamento dispostos
uniformemente sobre uma circunferência de 150 mm de diâmetro. Como
resultado da disposição uniforme, os 16 dispositivos ficam espaçados em 22,5º
entre si. A Figura 22 mostra os detalhes desta montagem.
A bobina de campo foi alimentada por um gerador senoidal modelo
TG2000 (Thurlby Thandar Instruments) com frequência ajustável entre 1 e 20
MHz e amplitude de 20 V. Nos pontos de medição o campo magnético foi
detectado usando8se a sonda magnética RSH 40081 conectada ao amplificador
Hz 816 (Rohde & Schwarz). O sinal do amplificador foi lido em um osciloscópio
DPO4104 (Tektronix). A tensão aplicada na bobina geradora foi lida
simultaneamente em outro canal e a diferença de fase entre estes sinais foi
calculada através de uma função específica do osciloscópio.
Figura 22 – Representação esquemática do experimento de medição de sensibilidade do campo secundário em TIM. (A) osciloscópio; (B) gerador de sinais; (C) bobina de campo; (D) sensor de campo magnético
Uma solução aquosa de Nitrato de Sódio (NaNO3) com concentração de
10% em volume e condutividade 10 S/m medida com condutivímetro CD84303
(Lutron) foi usada como objeto de teste em um recipiente cilíndrico de vidro com
diâmetro de 90 mm e altura de 200 mm.
O cálculo numérico efetuado é baseado na discretização espacial do
calculado a partir da integração numérica da equação de Biot8Savart e as
correntes induzidas no objeto foram obtidas através do método das impedâncias
(ORCUTT e GANDHI, 1988). A discretização do objeto foi feita com elementos de
volume de forma cúbica. As etapas necessárias para o cálculo dos campos
primário e secundário são mostradas a seguir. Nestas equações é um
elemento de comprimento ao longo da espira percorrido pela corrente Io, h é o
parâmetro de malha na rede de discretização (o parâmetro de malha é a aresta
do elemento cúbico de volume), o é a permeabilidade magnética do vácuo e os
vetores e identificam as posições no objeto e na espira, respectivamente. As
posições na rede de discretização são identificadas por índices inteiros (i,j,k) nos
eixos x, y e z, respectivamente.
1) O potencial magnético primário é calculado através da discretização do
caminho percorrido pela corrente considerada filamentar na bobina de campo e
aplicação da equação abaixo:
/ = 49 YX |\ − \∆XZ
Z| Z
Equação 19
2) No método das impedâncias o meio é modelado por um circuito
equivalente no qual as faces dos elementos de volume atuam como malhas de
circuito elétrico. O potencial elétrico aplicado a cada malha é obtido por meio da
Lei de Faraday, através do cálculo numérico da circulação do potencial
magnético. A Figura 23 mostra um elemento de discretização do objeto com os
potenciais aplicados em cada direção e as correntes de malha em cada face.
Para a posição (i,j,k) no plano x a expressão para o potencial elétrico é dada na
seguinte equação:
] ^, , _ = Mℎ`/a ^, , _ + 1 − /a ^, , _ − /b ^, + 1, _ + /b ^, , _ c Equação 20
Onde h é o parâmetro de malha, ou seja, o comprimento da aresta dos
3) As correntes induzidas no circuito equivalente são então calculadas
através de análise de malha, ou seja, por meio da segunda Lei de Kirchhoff. O
conjunto de 3N equações de malha, onde N é o número de elementos cúbicos,
deve ser resolvido para se obter a distribuição espacial de correntes induzidas no
objeto. A relação entre diferença de potencial e corrente elétrica em cada uma
das direções dentro de um elemento de volume define uma impedância do circuito
equivalente do meio. Essas impedâncias são calculadas supondo8se que o campo
elétrico dentro do elemento de volume é uniforme e que a condutividade (σ) e
permissividade (ε) não variam com a posição dentro de cada elemento. Para a
posição (i,j,k) e direção y na malha, por exemplo, a impedância á dada por:
da ^, , _ = eℎ` a ^, , _ + a ^, , _ cf@g Equação 21
4) Os campos primário e secundário são calculados pela integração
numérica da equação de Biot8Savart usando as equações abaixo:
.h= 49 YX ∆XZ|\ − \× \ − \Z
Z|j Z
Equação 22
.k = 49Y`Xl]. ∆m. 1]+ Xla. ∆n. 1|\ − \′ ^, , _ |a+ Xlb. ∆o. 1jbc × \ − \′ ^, , _
Z
Equação 23
Na equação do campo secundário , e são os vetores unitários nas
direções dos eixos coordenados e Ibx, Iby e Ibz são as correntes de ramo que
devem ser calculadas a partir das correntes de malha obtidas na etapa anterior.
A região de análise foi modelada como um cubo de arestas de 106 mm
com 48 divisões em cada eixo gerando um parâmetro de malha de 2,2 mm e
110.592 elementos de volume. O número de elementos de malha foi escolhido
buscando um equilíbrio entre tempo de processamento e resolução espacial.
O objeto foi modelado no centro da região de análise, a constante dielétrica
da água foi utilizada para modelar o interior do objeto, já que o recipiente contém
trata de uma substância não magnética. A condutividade utilizada na simulação
para o interior do frasco foi de 10 S/m, a mesma obtida em medições no líquido
utilizado experimentalmente.
Figura 23 Elemento de volume da discretização do objeto mostrando o potencial aplicado e as correntes induzidas.
Para realizar a análise numérica um programa de simulação foi construído
em Linguagem C++ e executado em um computador com sistema operacional
Windows XP. As etapas de pós8processamento e geração de gráficos foi
realizada em ambiente MatLab. Os parâmetros de simulação são mostrados na
Tabela 1.
4.2 RESULTADOS
A Figura 24 mostra os resultados experimentais e analíticos para a
variação da fase do campo magnético devido à presença do objeto condutor, nas
quinze posições de medição do tomógrafo e para três frequências diferentes: 5,
10 e 20 MHz. A escolha das frequências foi feita de modo a varrer a maior parte
da faixa entre 1 a 20 MHz, dando preferência ao uso de frequências altas devido
a maior defasagem do sinal nessas frequências. Nestes gráficos é indicado o erro
quadrático médio das medições tomando8se o resultado analítico como
referência. Observa8se que o erro relativo em relação ao valor máximo de
defasagem é menor para 5 MHz com 2,4%, seguido por 10 MHz com 5,4% e
Ay (i+1,j,k)
Iy(I,j+1,k)
Az(i+1,j,k)
Iz(i,j,k+1)
Ay (i,j,k) Ay (i,j,k+1)
Az(i,j,k)
Az(I,j+1,k)
Ax (i,j,k) Ax (i,j+1,k)
Ax (i,j,k+1)
Ix (i+1,j,k)
Ax (i,j+1,k+1)
Az(i+1,j+1,k) Ay (i+1,j,k)
Iy(I,j+1,k)
Az(i+1,j,k)
Iz(i,j,k+1)
Ay (i,j,k) Ay (i,j,k+1)
Az(i,j,k)
Az(I,j+1,k)
Ax (i,j,k) Ax (i,j+1,k)
Ax (i,j,k+1)
Ix (i+1,j,k)
Ax (i,j+1,k+1)
finalmente 20 MHz com 7,8%. Observa8se também que a relação entre o campo
primário e campo secundário aumenta com a frequência. Esse efeito pode ser
observado na Figura 25.
Tabela 1 Parâmetros de Simulação
Parâmetro Valor
Frequência 1 a 20 MHz
Parâmetro de malha ( h ) 2,2 mm
Número de elementos de volume 110.592
Permeabilidade magnética relativa 1
Condutividade do objeto (σ) 10 S/m
Constante dielétrica do objeto (ε) 80
Para caracterizar a dependência da sensibilidade com a frequência, a
variação de fase foi medida em três posições do tomógrafo para frequências
variando entre 1 e 20 MHz. Estes resultados são mostrados na Figura 25. O
parâmetro indica o desvio quadrático médio dos valores medidos em relação à
tendência linear observada no conjunto de pontos e que foi obtida com uma
função de interpolação linear do MatLab. Observa8se que a defasagem aumenta
linearmente com a frequência e que as posições afastadas da bobina de campo
apresentam maior sensibilidade.
4.3 DISCUSSÃO
Os valores apresentados na Figura 24 e na Figura 25 foram obtidos com o
osciloscópio no modo de média temporal de 256 amostras. Isto foi necessário
devido ao pequeno valor de defasagem e grande instabilidade decorrente de
interferência eletromagnética no ambiente de medição que tornavam as leituras
muito instáveis. Com isso, cada medição foi obtida após cerca de um minuto de
aquisição e processamento pelo osciloscópio. Apesar disso, os resultados na
Figura 24 apresentam boa concordância, indicando que tanto o método numérico
quando o método experimental proporcionam boa confiabilidade. Estes são dois
fatores fundamentais no projeto e implementação de um tomógrafo, uma vez que
condutividade no objeto a partir de um processo de reconstrução de imagem no
qual a sensibilidade de medição é estimada pelo método numérico.
Figura 24 – Variação de fase do campo magnético devido à presença do cilindro contendo o líquido condutor para três frequências diferentes. (o) experimental; (□) analítico. O erro quadrático médio é indicado em cada gráfico.
De acordo com a Figura 24, a sensibilidade varia de zero a um valor
máximo que ocorre sempre a 180o da posição da bobina de campo. Algumas
posições apresentam sensibilidade muito baixa (próximas de 0o e 360o, 90o e
270o) e, portanto, as medições estão sujeitas a erros relativos maiores. Em
protótipos de tomógrafos já apresentados na literatura (VAUHKONEN, HAMSCH
e IGNEY, 2008; IGNEY, WATSON, et al., 2005), as bobinas de campo e de
medição são montadas nas mesmas posições. Para cada bobina de campo ativa
em uma determinada etapa da medição, a leitura de campo é realizada em todas
as demais bobinas de medição exceto aquela montada na mesma posição da
bobina ativa. Neste caso as bobinas são posicionadas simetricamente em torno
do objeto e sempre há posições de baixa sensibilidade como aquelas indicadas
acima. Portanto, para realizar a detecção do campo magnético é necessário usar
erro = erro = ,
,