O Teorema do Ponto Fixo de Banach e Algumas de
Suas Conseq¨
uˆ
encias
Conte´
udo
21.1 O Teorema de Ponto Fixo de Banach . . . 993
21.1.1 Generaliza¸c˜oes do Teorema de Ponto Fixo de Banach . . . 995
21.2 Aplica¸c˜ao a Equa¸c˜oes Num´ericas. O M´etodo de Newton . . . 997
21.3 Aplica¸c˜ao `as Equa¸c˜oes Integrais de Fredholm e de Volterra . . . 1001
21.4 Aplica¸c˜oes `a Teoria das Equa¸c˜oes Diferenciais Ordin´arias . . . 1007
21.4.1 O Teorema de Picard-Lindel¨of . . . 1007
21.4.2 Generalizando o Teorema de Picard-Lindel¨of. Solu¸c˜oes Globais . . . 1011
21.4.3 Um Teorema de Compara¸c˜ao de Solu¸c˜oes de EDO’s . . . 1012
21.5 O Teorema da Fun¸c˜ao Impl´ıcita e o Teorema da Fun¸c˜ao Inversa . . . 1015
21.5.1 O Teorema da Fun¸c˜ao Impl´ıcita . . . 1015
21.5.2 O Teorema da Fun¸c˜ao Inversa . . . 1019
AP ˆENDICES . . . 1020
21.A O Lema de Gr¨onwall . . . 1020
S
ejaX um conjunto n˜ao-vazio e f :X →X uma fun¸c˜ao deX emX. Muitas vezes, em problemas pr´aticos e te´oricos, estamos interessados em encontrar os pontosx∈X que s˜ao levados em si mesmos pela fun¸c˜aof, ou seja, os pontosx∈X tais que
x = f(x).
Os pontos que satisfazem essa equa¸c˜ao s˜ao chamados depontos fixosda transforma¸c˜aof e a equa¸c˜ao acima ´e denominada equa¸c˜ao de ponto fixo. Veremos abaixo v´arios exemplos de equa¸c˜oes desse tipo, tanto no contexto de equa¸c˜oes num´ericas quanto no de equa¸c˜oes integrais e diferenciais.
Na pr´atica, dada uma fun¸c˜ao f, pode afigurar-se dif´ıcil saber se sequer existe um ponto fixo para ela. Muitas vezes estamos interessados em saber quantos pontos fixos h´a e, freq¨uentemente, gostar´ıamos de garantir que h´a um e apenas um ponto fixo de uma dada fun¸c˜ao (a chamada “unicidade da solu¸c˜ao”).
Teoremas que nos garantam existˆencia e, por vezes, unicidade de solu¸c˜oes de equa¸c˜oes de ponto fixo s˜ao chamados de teoremas de ponto fixo. H´a v´arios teoremas de tal tipo na literatura matem´atica, como por exemplo, o Teorema de Ponto Fixo de Banach1, o Teorema de Ponto Fixo Brouwer2, o teorema do ponto fixo de Schauder3 e v´arios outros, todos com pressupostos distintos sobre o conjuntoX e sobre a fun¸c˜aof.
Seja por exemplo o disco fechado Dn deRn:
Dn:=
(x1, . . . , xn)∈Rn
q
x2
1+· · ·+x2n ≤ 1
.
O chamadoTeorema do Ponto Fixo de Brouwerafirma que toda fun¸c˜ao cont´ınua (na topologia usual) deDn emDn tem
pelo menos um ponto fixo. Aqui a unicidade nem sempre pode ser garantida: pense no exemplo das rota¸c˜oes emR3em torno de um eixo que passa pela origem. Todo ponto ao longo do eixo de rota¸c˜ao ´e levado em si mesmo pela rota¸c˜ao e ´e, portanto, um ponto fixo da mesma.
O Teorema do Ponto Fixo de Schauder afirma que seX ´e um subconjunto convexo e compacto4 de um espa¸co de Banach ent˜ao toda fun¸c˜ao cont´ınua (na topologia da norma) deX emX tem um ponto fixo (n˜ao-necess´ariamente ´unico).
1
Stefan Banach (1892–1945).
2
Luitzen Egbertus Jan Brouwer (1881–1966).
3
Juliusz Pawel Schauder (1899–1943).
4
Para a defini¸c˜ao da no¸c˜ao de compacidade e suas propriedades, vide Se¸c˜ao 28.3, p´agina 1252.
Aqui trataremos de um teorema de ponto fixo extremamente ´util conhecido comoTeorema de Ponto Fixo de Banach, que ´e v´alido em espa¸cos m´etricos completos. De fato, este ´e de longe o teorema de ponto fixo com mais aplica¸c˜oes, sendo que sua influˆencia se estende aos dom´ınios das equa¸c˜oes integrais, das equa¸c˜oes diferenciais, das equa¸c˜oes num´ericas em
C, da An´alise Num´erica e de muitas outras ´areas da Matem´atica pura e aplicada. Na Se¸c˜ao 21.4, p´agina 1007, tratamos
de aplica¸c˜oes do Teorema de Ponto Fixo de Banach `a teoria das equa¸c˜oes diferenciais ordin´arias. Na Se¸c˜ao 16.10, p´agina 781, tratamos de uma importante aplica¸c˜ao do Teorema de Ponto Fixo de Banach `a teoria das equa¸c˜oes diferenciais parciais, a saber, usamos o mesmo para obter a solu¸c˜ao geral de equa¸c˜oes diferenciais parciais de tipo hiperb´olico com coeficientes constantes em duas dimens˜oes.
O Teorema de Ponto Fixo de Banach foi estabelecido por Banach em 19225. Uma das raz˜oes de sua importˆancia reside no fato de fornecer, junto com seu enunciado, um m´etodo iterativo aproximativo para a determina¸c˜ao do ponto fixo, m´etodo este que ´e muito eficiente. Outra raz˜ao ´e o fato de o teorema reunir condi¸c˜oes que garantem unicidade do ponto fixo. Vamos ao seu enunciado.
21.1
O Teorema de Ponto Fixo de Banach
Teorema 21.1 (Teorema de Ponto Fixo de Banach) Seja M um conjunto dotado de uma m´etrica de suponhaM
completo em rela¸c˜ao ad. SejaAum subconjunto fechado deM e seja T :A→A uma fun¸c˜ao deA emA. Vamos ent˜ao supor que exista um n´umero qcom0≤q <1 tal que para todos os pontosxe y deA valha
d(T(x), T(y)) ≤ q d(x, y). (21.1)
Ent˜ao, a equa¸c˜ao de ponto fixo
x = T(x), (21.2)
tem solu¸c˜ao em A e essa solu¸c˜ao ´e ´unica. Al´em disso, para qualquer x0∈A, a seq¨uˆencia xn =T(xn−1),n≥1, obtida aplicando-se repetidamente T a partir de x0, converge (rapidamente) ao ponto fixoxna m´etricad. A saber, tem-se que
d(xn, x) ≤
qn
1−q d(x1, x0). (21.3)
2
Uma fun¸c˜ao T : A → A tal que existe um n´umero q com 0 ≤ q < 1 e tal que para todos os pontos x e y de A
valha a desigualdade (21.1) ´e dita ser uma contra¸c˜aoem rela¸c˜ao `a m´etrica d. O teorema acima afirma ent˜ao que toda contra¸c˜ao em um espa¸co m´etrico completo tem um e somente um ponto fixo. Esse teorema fornece um m´etodo iterativo de determinar aproximadamente o ponto fixo, sendo que, por (21.3), a aproxima¸c˜ao ´e tanto melhor quanto mais itera¸c˜oes forem feitas. Mais adiante aperesentaremos um teorema an´alogo ao Teorema 21.1 na qual a condi¸c˜ao de contra¸c˜ao ´e enfraquecida. Vide Teorema 21.2, p´agina 995.
Vamos primeiro provar o teorema e depois veremos v´arios exemplos de seu uso.
Prova do Teorema 21.1. ComoA´e um subconjunto fechado de um espa¸co m´etrico completo, ent˜aoA´e tamb´em completo em rela¸c˜ao `a mesma m´etrica (vide Proposi¸c˜ao 20.7, p´agina 961, ou equivalentemente, a Proposi¸c˜ao 22.11, p´agina 1041).
Para simplificar a nota¸c˜ao denotaremos por Tn a n-´esima composi¸c˜ao de T consigo mesma: T◦ · · · ◦T
| {z }
n
. Definimos
ent˜ao para umx0∈Aarbitr´arioxn=Tn(x0),n∈N.
Vamos agora provar que {xn} ´e uma seq¨uˆencia de Cauchy em A. Para isso sejam m e n dois n´umeros naturais
5
quaisquer tais que m < n. Ent˜ao, usando a desigualdade triangularn−mvezes temos o seguinte:
d(xm, xn) ≤ d(xm, xm+1) +d(xm+1, xn)
≤ d(xm, xm+1) +d(xm+1, xm+2) +d(xm+2, xn)
.. .
≤ d(xm, xm+1) +d(xm+1, xm+2) +· · ·+d(xn−1, xn).
Pela propriedade de contra¸c˜ao, temos que
d(xa, xa+1) = d(T(xa−1), T(xa)) ≤ q d(xa−1, xa) ≤ · · · ≤qad(x0, x1). Da´ı
d(xm, xn) ≤ qm+qm+1+. . .+qn−1d(x0, x1) e, portanto,
d(xm, xn) ≤ qm 1 +q+. . .+qn−1−m
d(x0, x1) ≤ qm
∞
X
a=0
qa
!
d(x0, x1) =
qm
1−q d(x0, x1).
Isso prova que {xn} ´e uma seq¨uˆencia de Cauchy, pois qm pode ser feito arbitrariamente pequeno tomando m grande,
para qualquern > m.
Como{xn}´e uma seq¨uˆencia de Cauchy emAeA´e completo, deve haverxemAunico ao qual a seq¨´ uˆencia converge.
Temos sempre, usando a desigualdade triangular, que
d(x, xm) ≤ d(x, xn) +d(xn, xm).
Tomandon > m, temos
d(x, xm) ≤ d(x, xn) +
qm
1−qd(x0, x1).
Comoxn se aproxima dexparangrande, podemos fazer o termod(x, xn) arbitrariamente pequeno, tomandongrande,
sem alterar os demais. Da´ı, conclu´ımos que
d(x, xm) ≤ q
m
1−qd(x0, x1). (21.4)
Essa ´ultima desigualdade mostra quexmde fato se aproxima exponencialmente r´apido dex.
Vamos agora provar quex, o limite da seq¨uˆencia{xn}, ´e um ponto fixo. Para isso calculemosd(x, T(x)). Teremos,
pela desigualdade triangular
d(x, T(x)) ≤ d(x, xm+1) +d(xm+1, T(x)),
para todo m. Usando (21.4) e a contratividade deT teremos,
d(x, T(x)) < q
m+1
1−qd(x0, x1) +q d(xm, x) < qm+1
1−qd(x0, x1) + qm+1
1−qd(x0, x1) = 2 qm+1
1−qd(x0, x1).
Comom´e arbitr´ario podemos fazerm→ ∞e obtemosd(x, T(x)) = 0, o que implica quex=T(x).
Por fim, resta-nos provar que x´e o ´unico ponto fixo de T. Para tal, vamos supor que haja um outro: x′ =T(x′). Ter´ıamos, usando a contratividade, que
d(x, x′) = d(T(x), T(x′)) ≤ q d(x, x′),
ou seja, (1−q)d(x, x′)≤0. Comoq <1 isso implicad(x, x′) = 0, que implicax=x′. Isso completa a prova do Teorema
21.1.1
Generaliza¸
c˜
oes do Teorema de Ponto Fixo de Banach
Nesta se¸c˜ao trataremos de duas exten¸c˜oes do Teorema de Ponto Fixo de Banach, uma tratando de um caso onde a condi¸c˜ao de contratividadeq <1 n˜ao ´e estritamente satisfeita e outro onde a aplica¸c˜ao T n˜ao ´e contrativa, mas alguma potˆencia deT o ´e.
A condi¸c˜ao que q < 1 ´e crucial para a demonstra¸c˜ao do Teorema 21.1 e sem ela suas conclus˜oes podem n˜ao mais ser v´alidas. Vejamos o seguinte exemplo, citado em diversos livros-texto. Seja M = [1, ∞) com a m´etrica usual
d(x, y) =|x−y| e sejaT :M →M dada porT(x) =x+x−1. Ent˜ao vale para todoxey∈M,x6=y,
d(T(x), T(y)) < d(x, y).
De fato, para 1≤x < y,
T(y)−T(x) =
Z y
x
T′(t)dt =
Z y
x
1−t12
dt <
Z y
x
dt = y−x ,
pois 1−t−2<1 parat >1, sendo essa a melhor estimativa poss´ıvel. Assim,
|T(y)−T(x)| < |y−x|,
como quer´ıamos provar. Note agora, por´em, queT n˜ao tem nenhum ponto fixo. De fato,T(x) =xsignificax+x−1=x, ou seja,x−1= 0, o que n˜ao ´e poss´ıvel se x∈[1, ∞).
Em espa¸cos m´etricos compactos, por´em, a condi¸c˜ao de contra¸c˜aoq <1 pode ser enfraquecida preservando essencial-mente os mesmos resultados do Teorema 21.1. Esse ´e o conte´udo do Teorema 21.2, adiante.
• Enfraquecendo a condi¸c˜ao de contratividade. Aplica¸c˜oes em compactos
SejaM um conjunto dotado de uma m´etricad. Recordemos6queA⊂M ´e dito ser compacto se e somente se possuir a propriedade de Bolzano7-Weierstrass8: toda seq¨uˆencia emApossui uma sub-seq¨uˆencia convergente emAem rela¸c˜ao `a m´etricad. Por um teorema geral (Teorema 28.11, p´agina 1264), o fato deAser compacto em um espa¸co m´etrico implica queA´e fechado, completo e limitado.
O seguinte teorema ´e devido a Edelstein9.
Teorema 21.2 Seja M um conjunto dotado de uma m´etrica d. Seja A⊂ M compacto (na topologia induzida em M
pela m´etrica d) e seja T :A→A uma fun¸c˜ao de Aem A. Vamos supor que valha a condi¸c˜ao
d(T(x), T(y)) < d(x, y) (21.5)
para todos x, y∈A comx6=y. Ent˜ao, a equa¸c˜ao de ponto fixo x=T(x) tem solu¸c˜ao emA e essa solu¸c˜ao ´e ´unica. 2
Coment´ario. O fato de A ser suposto compacto faz com que seja dispens´avel supor que M seja completo, pois A o ´e. Vide Teorema 28.11, p´agina 1264.
Prova. Observemos em primeiro lugar que seT possuir um ponto fixo, este ´e ´unico. De fato, sejam x, y∈A tais que
T(x) =xeT(y) =y. Se x6=y, valeria d(x, y) =d(T(x), T(y))< d(x, y), o que ´e uma desigualdade imposs´ıvel. Logo
x=y.
Pelas hip´oteses, parax0∈Aa seq¨uˆenciaxn =Tn(x0) de elementos deAtem ao menos uma subseq¨uˆencia convegente a um elemento x∗ ∈ A. Vamos provar que esse x∗ ´e um ponto fixo de T, ou seja, x∗ = T(x∗). Vamos supor que
T(x∗)6=x∗ e mostrar que isso leva a uma contradi¸c˜ao.
Sejaxnk,k∈N, uma sub-seq¨uˆencia que converge ax∗da seq¨uˆenciaxn=T n(x
0), ou seja, que satisfaz a propriedade: para todo ǫ >0 existeK(ǫ) tal qued(xnk, x∗)≤ǫpara todo k≥K(ǫ).
6
Para a defini¸c˜ao da no¸c˜ao de compacidade e suas propriedades, vide Se¸c˜ao 28.3, p´agina 1252.
7
Bernard Placidus Johann Nepomuk Bolzano (1781–1848).
8
Karl Theodor Wilhelm Weierstrass (1815–1897).
9
Por (21.5), d(T(x∗), T(xnk)) ≤ d(x∗, xnk) (a igualdade se dando apenas se x∗ = xnk), o que implica que
(xnk, T(xnk)) converge a (x∗, T(x∗)) emA
2≡A×Asex
nk converge ax∗.
Seja r0:=d(T(x∗), (x∗))/3. Para todok≥K(r0) valed(x∗, xnk)≤r0 e pela desigualdade triangular,
3r0 = d(T(x∗), x∗) ≤ d(T(x∗), T(xnk)) +d(T(xnk), xnk) +d(xnk, x∗)
(21.5)
≤ 2d(x∗, xnk) +d(T(xnk), xnk) ≤ 2r0+d(T(xnk), xnk).
Logo, para todok≥K(r0),r0≤d(T(xnk), xnk), ou seja,
d(T(x∗), x∗) ≤ 3d(T(xnk), xnk). (21.6)
Seja agoraD:={(x, x), x∈A} ⊂A2, o conjunto diagonal deA2e defina-se emA2\Da fun¸c˜aoF:A2\D→[0, ∞) dada por
F(x, y) := d(T(x), T(y))
d(x, y) .
Provemos em primeiro lugar queF ´e cont´ınua emA2\D. De fato, da desigualdade triangular segue qued(T(x), T(y))≤
d(T(x), T(x′)) +d(T(x′), T(y′)) +d(T(y′), T(y)) Portanto,
d(T(x), T(y))−d(T(x′), T(y′)) ≤ d(T(x), T(x′)) +d(T(y′), T(y)) (21.5)
≤ d(x, x′) +d(y′, y).
Analogamente, prova-se qued(T(x′), T(y′))−d(T(x), T(y))≤d(x, x′) +d(y′, y). Ambas as rela¸c˜oes mostram que
d(T(x′), T(y′))−d(T(x), T(y))
≤ d(x, x′) +d(y, y′),
o que prova que d(T(x), T(y)) ´e cont´ınua emA2, pois se o par (x′, y′) converge ao par (x, y), ent˜aod(T(x′), T(y′))
converge a d(T(x), T(y)). Demonstra-se analogamente (tome T = id) que a fun¸c˜ao d(x, y) ´e cont´ınua emA2 e isso mostra queF ´e cont´ınua emA2\D.
Pela hip´otese (21.5) valeF(x, y)<1 para todos (x, y)∈A2\D. Como, por hip´oteseT(x
∗)6=x∗, o par (x∗, T(x∗))
n˜ao pertence aD e, portanto,F(x∗, T(x∗)) est´a definido.
Seja r >0 eBra bola fechada de raio remA2\D centrada em (x∗, T(x∗)):
Br :=
n
(x, y)∈A2\D d(x, x∗)≤r e d(y, T(x∗))≤r
o
.
Por ser cont´ınua, F assume um valor m´aximof emBr. Escolhendo r pequeno o suficiente, podemos garantir que
f <1 (pararpequenof vale aproximadamenteF(x∗, T(x∗))<1). Assim, para todo (x, y)∈Br tem-se
d(T(x), T(y)) ≤ f d(x, y). (21.7)
Como (xnk, T(xnk)) converge a (x∗, T(x∗)), conclu´ımos que para todol grande o suficiente, digamos l ≥ L, vale
(xnl, T(xnl))∈Br. Assim, por (21.7) devemos ter
dT(xnl), T T(xnl)
≤ f d(xnl, T(xnl)),
ou seja,
d(xnl+1, xnl+2) ≤ f d(xnl, xnl+1). (21.8)
Temos, assim, que
d(xn(l+1), T(xn(l+1))) = d(T n(l+1)(x
0), Tn(l+1)+1(x0))
(21.5)
≤ d(Tnl+1(x
0), Tnl+2(x0)) = d(xnl+1, xnl+2)
(21.8)
Acima, na passagem da primeira para a segunda linha, usamosn(l+1)−nl−1 vezes a condi¸c˜ao (21.5).
Provamos, portanto, que d(xn(l+1), T(xn(l+1))) ≤f d(xnl, T(xnl)) para todo l ≥L. Por indu¸c˜ao, isso implica que
para todo k≥l≥L vale
d(xnk, T(xnk)) ≤ f k−ld(x
nl, T(xnl)).
Fixando l, isso implica que lim
k→∞d(xnk, T(xnk)) = 0, poisf < 1. Por (21.6), isso implica que d(T(x∗), x∗) = 0,
completando a prova.
• Enfraquecendo a condi¸c˜ao de contratividade. Potˆencias contrativas
Antes de tratarmos das importantes aplica¸c˜oes do Teorema de Ponto Fixo de Banach a equa¸c˜oes integrais vamos a uma outra pequena generaliza¸c˜ao do mesmo. Esta nos ser´a ´util, por exemplo, quando tratarmos da equa¸c˜ao integral de Volterra. Ocorre por vezes que uma aplica¸c˜aoT, como discutida acima, n˜ao ´e uma contra¸c˜ao, mas alguma de suas potˆencias o ´e. Nesse caso, podemos tamb´em garantir os mesmos resultados do Teorema de Ponto Fixo de Banach. Temos o seguinte:
Proposi¸c˜ao 21.1 Seja M um conjunto dotado de uma m´etrica de suponha M completo em rela¸c˜ao a d. Seja A um subconjunto fechado em M e sejaT uma fun¸c˜ao deAemA,T :A→A. Vamos supor que exista um n´umerom∈N tal
que a aplica¸c˜ao Tm seja uma contra¸c˜ao, cujo ponto fixo ´unico ´ex∈A (a existˆencia e a unicidade de tal ponto fixo s˜ao
garantidas pelo Teorema de Ponto Fixo de Banach, Teorema 21.1). Ent˜ao,T tamb´em tem um ponto fixo ´unico, a saber,
o mesmo x. 2
Prova. Para provar quex´e tamb´em ponto fixo deT, notemos que, comox=Tm(x), temos tamb´em que
T(x) = Tm+1(x) = Tm(T(x)).
Isso diz queT(x) ´e ponto fixo deTm. Pelo Teorema de Ponto Fixo de Banach este ´ultimo ´exe ´e ´unico. Da´ıT(x) =x.
Ora, isso diz precisamente quex´e ponto fixo deT.
Provemos agora que x´e tamb´em o ´unico ponto fixo deT. Para tal, suponha que haja um outro: y. Ent˜aoy=T(y). Daqui tiramos que T(y) = T2(y). Juntando as duas vemos que y = T(y) = T2(y). Repetindo esse procedimento, chegamos a y=T(y) =T2(y) =· · ·=Tm(y). Isso diz quey ´e ponto fixo deTm. Agora, pelas hip´oteses, o ´unico ponto
fixo deTm´ex. Logoy =x.
21.2
Aplica¸
c˜
ao a Equa¸
c˜
oes Num´
ericas. O M´
etodo de Newton
• Equa¸c˜oes num´ericas
Vamos a alguns exemplos simples de aplica¸c˜oes do Teorema de Ponto Fixo de Banach. Seja a reta real e a seguinte equa¸c˜ao de ponto fixo emR:
x = λcos(x),
onde 0< λ <1 ´e uma constante dada. Ter´a essa equa¸c˜ao uma solu¸c˜ao? Ser´a ela ´unica? Como T(x) :=λcos(x) ´e uma fun¸c˜ao de Rem R, podemos adotar em R a m´etrica usual em rela¸c˜ao `a qual R ´e completo. Em face do Teorema de
Ponto Fixo de Banach a quest˜ao natural ´e saber seT ´e uma contra¸c˜ao. Vamos provar que isso ´e verdade.
d(T(x), T(y)) = λ|cos(x)−cos(y)| = λ
Z y
x
sen (t)dt
≤ λ|x−y| = λ d(x, y),
pois|sen (t)| ≤1. Assim, vemos queT ´e uma contra¸c˜ao comq=λ.
O Teorema de Ponto Fixo de Banach nos afirma ent˜ao que, partindo-se de qualquer n´umero real x0, as iteradas sucessivas deT convergem ao n´umerox, ponto fixo deT:
xn = λcos (λcos (λcos (· · ·λcos(x0)· · ·)))
| {z }
nvezes
No caso λ= 1/2, o estudante que tenha uma simples calculadora ´e estimulado a determinar que o ponto fixo ´e x ≃
0,450183611. . ..
E. 21.1 Exerc´ıcio. Nesse caso, tomando por exemplox0= 0, estime o erro da aproxima¸c˜ao se pararmos ap´os 30 itera¸c˜oes.
6
E. 21.2 Exerc´ıcio. O que acontece na equa¸c˜ao de ponto fixo acima seλ >1? A solu¸c˜ao permanece ´unica? Fa¸ca gr´aficos
das fun¸c˜oesa(x) =xeb(x) =λcos(x)para esclarecer essa quest˜ao. 6
E. 21.3 Exerc´ıcio. Use o Teorema de Ponto Fixo de Banach para mostrar que, em R, a equa¸c˜aox =e−x tem uma e
somente uma solu¸c˜ao. Qual ´e ela, aproximadamente? Estime o erro ap´os40itera¸c˜oes. 6
• O mapa log´ıstico
Seja M =Rcom a m´etrica usuald(x, y) =|x−y|e sejaA= [0, 1]. Considere a fun¸c˜aoT(x) =ax(1−x).
´
E f´acil ver que paraa∈[0, 4] a fun¸c˜aoT leva pontos deAem pontos deA, pois, parax∈[0, 1] vale 0≤T(x)≤a/4. A equa¸c˜ao de ponto fixoT(x) =x´eax(1−x) =x, que tem como solu¸c˜oesxa = 0 exb= (a−1)/a. A primeira solu¸c˜ao
pertence a A, mas a segunda s´o pertence aA sea >1. Conclu´ımos que a fun¸c˜ao T tem um ´unico ponto fixo em A se
a∈[0, 1] e dois pontos fixos sea∈(1, 4].
Paraa∈[0, 4] analisemos essa aplica¸c˜ao sob o ponto de vista de Teorema de Ponto Fixo de Banach. ´E f´acil ver que
|T′(x)|=a|1−2x| ≤aparax∈A. Logo, com 0≤x≤y≤1,
d(T(x), T(y)) = |T(x)−T(y)| =
Z y
x
T′(t)dt
≤
Z y
x |
T′(t)|dt < a|x−y| = ad(x, y).
Logo, para a∈ [0, 1) a fun¸c˜ao T ´e uma contra¸c˜ao e, pelo Teorema de Ponto Fixo de Banach, tem um e somente um ponto fixo, que vimos serxa = 0. O fato deT possuir tamb´em apenas um ponto fixo quando a= 1 (o mesmo xa = 0), quanto temos d(T(x), T(y))< d(x, y) parax6=y, n˜ao ´e explicado pelo Teorema de Ponto Fixo de Banach, mas sim pelo Teorema 21.2. Paraa >1 n˜ao podemos mais garantir contratividade e, de fato, constatamos queT tem dois pontos fixos em Aparaa∈(1, 4].
Consideremosa∈[0, 4]. Partindo de um pontox0∈Apodemos definir uma seq¨uˆencia de pontosxn+1=T(xn)∈A.
A evolu¸c˜aoxn 7→T(xn) =xn+1,n∈N0, ´e freq¨uentemente denominadamapa log´ıstico. O mapa log´ıstico foi originalmente introduzido como um modelo para evolu¸c˜ao de popula¸c˜oes sob certos fatores limitantes de crescimento.
Na regi˜ao contrativa 0 ≤ a < 1 a seq¨uˆenciaxn converge ao ponto fixo xa = 0. Na regi˜ao 1 ≤ a < 2, j´a fora da
contratividade e da validade do Teorema do Ponto Fixo de Banach, a seq¨uˆencia converge ao ponto fixoxb (xa torna-se
um ponto fixo repulsivo). Para 3< a <1 +√6≈3,45 a seq¨uˆencia torna-se oscilante, oscilando entre dois valores fixos. Dai para frente, a oscila¸c˜ao se d´a sucessivamente entre 4, 8, 16 etc. pontos, `a medida queacresce. A partir de a≈3,57 estabelece-se um regime ca´otico, com a seq¨uˆenciaxnpreenchendo densamente subconjuntos de Cantor do intervalo [0, 1].
O mapa log´ıstico ´e prot´otipo de um sistema dinˆamico discreto exibindo comportamento ca´otico. Para mais detalhes sobre o mapa log´ıstico, vide e.g. [80] ou [3].
• O m´etodo de Newton para zeros de fun¸c˜oes
O bem conhecido m´etodo de Newton de determina¸c˜ao de zeros de fun¸c˜oes reais10 pode ser estudado sob a luz do Teorema de Ponto Fixo de Banach. Sejaf : R→R uma fun¸c˜ao da qual desejamos determinar um zero, ou seja, uma
solu¸c˜ao da equa¸c˜aof(χ) = 0. Notemos que essa equa¸c˜ao equivale (trivialmente) `a equa¸c˜aoχ=χ−ff′((χχ)), pelo menos se
f′(χ)6= 0. Colocado dessa forma o problema torna-se um problema de ponto fixo para a aplica¸c˜aoT :R→Rdefinida
por
T(x) := x−ff′((xx)) .
Isso motiva a seguinte proposi¸c˜ao.
10
Proposi¸c˜ao 21.2 Sef for pelo menos duas vezes diferenci´avel, ent˜aof possuir´a um zero χ, ´unico, num dado intervalo [a, b] se existirλcom0≤λ <1 tal que
f(x)f′′(x)
(f′(x))2
≤ λ , para todox∈[a, b], (21.9)
e se
f(x)
f′(x)
≤ (1−λ)α , (21.10)
ondex:= a+2b eα:= b−2a. Nesse caso, tem-seχ= limn→∞xn, onde a seq¨uˆenciaxn∈[a, b]´e determinada iterativamente
por
xn+1 = xn− f(xn)
f′(x
n), n≥0,
sendox0∈[a, b], arbitr´ario. Ter-se-´a,
|χ−xn| ≤ λ n
1−λ|T(x0)−x0| ≤ λn
1−λ(b−a), n≥0. (21.11)
Se adotarmos x0=xteremos ainda |χ−xn| ≤αλn,n≥0, por (21.10). 2
Nota. A condi¸c˜ao (21.9) pressup˜oe f′(x) 6= 0 em [a, b]. Como veremos abaixo, a condi¸c˜ao (21.9) ´e importante por
garantir a contratividade de T, enquanto que (21.10) ´e suficiente para garantir que T leve pontos de [a, b] em [a, b], podendo ser eventualmente substitu´ıda por outra condi¸c˜ao que garanta o mesmo. Notemos, por fim, que o m´etodo de Newton funciona mesmo sob condi¸c˜oes mais fracas sobre a fun¸c˜ao f, nesse caso fora do contexto do Teorema de Ponto Fixo de Banach. A convergˆencia das itera¸c˜oes pode, ent˜ao, ser mais lenta que aquela garantida em (21.11). Vide para tal qualquer bom livro de C´alculo Num´erico.
Prova. Sejamx, y∈[a, b]. Tem-se
T(y)−T(x) = y−ff′((yy))−x+
f(x)
f′(x)
= Z y x d dt
t−ff′((tt))
dt =
Z y
x
f(t)f′′(t)
(f′(t))2 dt .
Assim, (21.9) garante que
|T(y)−T(x)| ≤ λ|y−x|.
Isso estaria dizendo-nos queT ´e um contra¸c˜ao. Precisamos, por´em, garantir queT leve pontos de [a, b] em [a, b]. Isso equivale a garantir que |T(x)−x| ≤αpara todox∈[a, b], ou seja, para todo xtal que|x−x| ≤α. Uma maneira de impor isso usando (21.9) ´e supor v´alida a condi¸c˜ao (21.10). De fato,
|T(x)−x| =
T(x)−T(x) +
f(x)
f′(x)
≤ |T(x)−T(x)|+
f(x)
f′(x)
por (21.9)
≤ λ|x−x|+
f(x)
f′(x)
por (21.10)
≤ λ|x−x|+ (1−λ)α
poisx∈[a, b]
≤ λα+ (1−λ)α
= α .
E. 21.4 Exerc´ıcio-Exemplo. Usando o m´etodo de Newton determine um valor aproximado para √2 calculando o zero positivo def(x) =x2−2. As itera¸c˜oes ser˜aox
n+1=T(xn)comT(x) = x 2+2
2x . Que intervalo[a, b]´e conveniente adotar? O que ocorre pr´oximo ax= 0e por que?
Partindo-se, por exemplo, de x0= 2 obtem-se os valores sucessivos3/2,17/12,577/408. Esse ´ultimo valor aproxima
√
2
com um erro de2×10−6. Note que esse procedimento fornece aproxima¸c˜oes de√2 por n´umeros racionais. 6
E. 21.5 Exerc´ıcio-Exemplo. Fa¸ca o mesmo para√3. 6
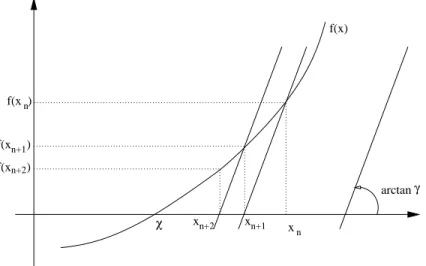
O m´etodo de Newton pode ser motivado geometricamente pela Figura 21.1. A linha reta que passa pelo ponto (xn, f(xn)) tangencia o gr´afico da fun¸c˜aof. Sua inclina¸c˜ao ´e, portanto,f′(xn). Assim, o pontoxn+1indicado na figura vale xn+1=xn−ff′((xxn)
n) (verifique!). Repetindo-se o procedimento a partir do pontoxn+1 aproximamo-nos mais ainda
do zeroχ def.
xn xn+1
f(x)
f(x )n
χ
Figura 21.1: Itera¸c˜ao no m´etodo de Newton. O pontoχ´e um zero def. A linha reta tangencia o gr´afico de f no ponto (xn, f(xn)) e sua inclina¸c˜ao ´ef′(xn). O ponto em que essa reta corta o eixo horizontal determinaxn+1.
xn f(x )n
χ xn+2 xn+1
f(x )n+1
n+2
f(x )
f(x)
arctanγ
No m´etodo de Newton usual, a reta tangente tem uma inclina¸c˜ao diferente a cada passo: f′(x
n). Um m´etodo
alternativo, por vezes denominadom´etodo de Newton simplificado, consiste em usar retas de inclina¸c˜ao fixa, tal como na Figura 21.2. Nessa situa¸c˜ao, o problema de determinar o zeroχ def equivale ao problema de ponto fixox=T(x) com
T(x) = x−1
γf(x).
E. 21.6 Exerc´ıcio. Usando o Teorema de Ponto Fixo de Banach estude esse problema de ponto fixo e determine condi¸c˜oes suficientes sobre a fun¸c˜aof e sobre a inclina¸c˜aoγpara garantir a existˆencia de um zero ´unico def em um intervalo[a, b]. 6
O m´etodo de Newton simplificado, descrito acima, pode ser empregado mesmo em situa¸c˜oes nas quais f n˜ao ´e diferenci´avel na regi˜ao de interesse.
E. 21.7 Exerc´ıcio-desafio. Generalize o m´etodo de Newton usando par´abolas tangentes, ao inv´es de retas tangentes.
Assuma, se o desejar, que a fun¸c˜aof a ser considerada ´e ao menos duas vezes diferenci´avel. 6
O m´etodo de Newton descrito acima pode ser generalizado para fun¸c˜oes de Rn em Rn, mas n˜ao trataremos disso
aqui.
21.3
Aplica¸
c˜
ao `
as Equa¸
c˜
oes Integrais de Fredholm e de
Vol-terra
No Cap´ıtulo 15, p´agina 709, introduzimos algumas equa¸c˜oes integrais de interesse e discutimos alguns m´etodos de solu¸c˜ao. Na presente se¸c˜ao discutiremos m´etodos iterativos de solu¸c˜ao de dois tipos de equa¸c˜oes integrais, as chamadas equa¸c˜oes integrais de Fredholm11 de segundo tipo e as equa¸c˜oes integrais de Volterra12 de segundo tipo. Ambas surgem em problemas de F´ısica-Matem´atica (a equa¸c˜ao integral de Fredholm, por exemplo, surge no problema de Sturm-Liouville. Vide Cap´ıtulo 14, p´agina 665) e trataremos de exemplos de aplica¸c˜oes adiante. A raz˜ao de tratarmos das mesmas aqui est´a na possibilidade de utilizarmos o Teorema de Ponto Fixo de Banach para estudar a existˆencia de solu¸c˜oes. O mesmo teorema fornece, tamb´em neste caso, um poderoso m´etodo iterativo de solu¸c˜ao, de grande importˆancia pr´atica. Para uma introdu¸c˜ao `a teoria das equa¸c˜oes integrais, vide tamb´em [136] e [176]. Para um tratamento extensivo da equa¸c˜ao integral de Volterra, vide [122].
Antes de tratarmos dessas equa¸c˜oes integrais, vamos discutir uma condi¸c˜ao que usaremos adiante.
• A condi¸c˜ao de Lipschitz
Sejaf :R→Ruma fun¸c˜ao.f ´e dita satisfazer acondi¸c˜ao de Lipschitz13 em toda a reta real se existir uma constante
M ≥0 tal que, para todosxex′ emRtenhamos
|f(x′)−f(x)| ≤ M|x′−x|.
Note que toda fun¸c˜ao que satisfaz a condi¸c˜ao de Lipschitz para algum M ´e necessariamente uma fun¸c˜ao cont´ınua (por que?).
Para que uma fun¸c˜ao satisfa¸ca a condi¸c˜ao de Lipschitz h´a uma condi¸c˜ao suficiente que ´e ´util. Seja f :R→Ruma
fun¸c˜ao diferenci´avel e tal que |f′(y)| ≤ M, para algum M ≥ 0 e para todo y ∈ R. Ent˜ao f satisfaz a condi¸c˜ao de
Lipschitz. Para provar isso, notemos que, pelo teorema fundamental do c´alculo, vale
f(x′)−f(x) =
Z x′
x
f′(y)dy .
Da´ı,
|f(x′)−f(x)| =
Z x′
x
f′(y)dy
≤
Z x′
x |
f′(y)|dy ≤
Z x′
x
M dy = M|x′−x|.
11
Erik Ivar Fredholm (1866–1927).
12
Vito Volterra (1860–1940).
13
(Aqui tomamosx < x′, sem perda de generalidade).
E. 21.8 Exerc´ıcio. Mostre que as fun¸c˜oes sen ecossatisfazem a condi¸c˜ao de Lipschitz. QualM pode ser adotado para
ambas? 6
E. 21.9 Exerc´ıcio. Mostre que a fun¸c˜ao f(y) = y2 n˜ao pode satisfazer a condi¸c˜ao de Lipschitz em toda a reta real.
Sugest˜ao: |x2−y2| ≤M|x−y|implica|x+y| ≤M parax6=y. 6
E. 21.10 Exerc´ıcio. Mostre que a fun¸c˜aof(y) = y1/3 n˜ao pode satisfazer a condi¸c˜ao de Lipschitz em toda a reta real. Sugest˜ao: tomex′= 0 e mostre que a rela¸c˜ao|x1/3| ≤M|x|n˜ao pode ser v´alida para todox∈RcomM ≥0fixo qualquer.
6
Uma fun¸c˜ao que satisfaz a condi¸c˜ao de Lipschitz ´e dita serLipschitz-cont´ınua. Para a demonstra¸c˜ao de resultados ´e muito ´util, por vezes, (veremos exemplos adiante) mostrar-se que uma fun¸c˜ao dada ´e Lipschitz-cont´ınua.
A condi¸c˜ao discutida acima tem, ali´as, uma generaliza¸c˜ao da qual n˜ao faremos uso aqui. Uma fun¸c˜aof :R→R´e
dita serH¨older14-cont´ınuase existiremM ≥0 eγ >0 tais que para todosxex′ emRvalha
|f(x′)−f(x)| ≤ M|x′−x|γ .
A condi¸c˜ao de ser Lipschitz-cont´ınua ´e o caso particular deste quandoγ= 1.
• As equa¸c˜oes integrais de Fredholm
Seja Io intervalo [a, b] da reta real (comaebdados ea < b) e sejam duas fun¸c˜oesf :I→ReK:I×I×R→R
que consideraremos cont´ınuas em seus dom´ınios de defini¸c˜ao. Sejaλ∈R, constante.
A chamadaequa¸c˜ao integral de Fredholmde segundo tipo, ou simplesmente equa¸c˜ao integral de Fredholm, ´e a seguinte equa¸c˜ao integral:
u(x) = f(x) +λ
Z b
a
K(x, y, u(y))dy .
Acimau:I→R´e a fun¸c˜ao inc´ognita. Note queK, que ´e chamada den´ucleoda equa¸c˜ao integral, ´e uma fun¸c˜ao de trˆes
vari´aveis e que a inc´ognitau(y) aparece na posi¸c˜ao de seu terceiro argumento, dentro da integral.
SejaC0(I) a cole¸c˜ao de todas as fun¸c˜oes cont´ınuas deIemR. J´a vimos anteriormente (Proposi¸c˜ao 20.6, p´agina 954) queC0(I) ´e um espa¸co m´etrico completo em rela¸c˜ao `a m´etrica
d∞(h, l) = sup
x∈I|
h(x)−l(x)|,
ondehel pertencem aC0(I).
Seja T a aplica¸c˜ao que leva C0(I) em si mesmo dada por
T(h)(x) = f(x) +λ
Z b
a
K(x, y, h(y))dy .
Note que se h´e uma fun¸c˜ao cont´ınua em I ent˜ao T(h) tamb´em ´e uma fun¸c˜ao cont´ınua em I. A equa¸c˜ao integral de Fredholm pode ser ent˜ao entendida como a equa¸c˜ao de ponto fixo emC0(I) dada por
u = T(u).
´
E natural, portanto, procurar condi¸c˜oes que fa¸cam deT uma contra¸c˜ao no espa¸co m´etrico completoC0(I), pois assim poderemos evocar o Teorema de Ponto Fixo de Banach. ´E neste momento que a condi¸c˜ao de Lipschitz se faz ´util. Vamos supor que a fun¸c˜aoK satisfa¸ca a condi¸c˜ao de Lipschitz para a terceira vari´avel: vamos supor que existeM ≥0 tal que para todo x,y∈I e todosz ez′∈Rvalha
K(x, y, z′)−K(x, y, z) ≤ M|z′−z|. (21.12)
14
Ent˜ao, pelo menos no caso em que M(b−a)<1, a aplica¸c˜aoT ´e uma contra¸c˜ao em C0(I) com rela¸c˜ao `a m´etricad∞
dada. Para provar isso, usamos que, para duas fun¸c˜oesh,l∈C0(I) temos
T(h)(x)−T(l)(x) = λ
Z b
a
h
K(x, y, h(y))−K(x, y, l(y))idy ,
donde tiramos que
|T(h)(x)−T(l)(x)| ≤ |λ|
Z b
a
K(x, y, h(y))−K(x, y, l(y))dy
≤ |λ|M
Z b
a |
h(y)−l(y)|dy
≤ |λ|M(b−a) sup
y∈I|
h(y)−l(y)| = |λ|M(b−a)d∞(h, l) . (21.13)
Logo,
d∞(T(h), T(l)) = sup
x∈I|
T(h)(x)−T(l)(x)| ≤ |λ|M(b−a)d∞(h, l).
Assim, vimos que, sob as hip´oteses acima, T ´e uma contra¸c˜ao se |λ| < 1/M(b−a). Essa condi¸c˜ao, se satisfeita, garante, pelo Teorema de Ponto Fixo de Banach, que h´a uma e somente uma fun¸c˜ao u em C0(I) que ´e solu¸c˜ao da equa¸c˜ao integral de Fredholm. Com isso, a solu¸c˜ao pode ser aproximada (exponencialmente, na m´etricad∞) partindo-se
de qualquer u0∈C0(I) atrav´es da seq¨uˆencia iteradaun =T(un−1),n∈N.
A condi¸c˜ao suficiente para termos contratividade M(b−a)<1 ´e, em suma, uma condi¸c˜ao sobre a fun¸c˜aoK e sobre o intervaloI. Note-se que n˜ao h´a qualquer restri¸c˜ao `a fun¸c˜aof, al´em da que seja cont´ınua.
E. 21.11 Exerc´ıcio. Mostre que a equa¸c˜ao integral de Fredholm
u(x) = 2 cos(x) +
Z 1
0 sen
x+yu(y) 2
dy , x∈[0, 1],
tem uma solu¸c˜ao ´unica em C0([0, 1]). Sugest˜ao: neste caso a fun¸c˜ao K ´eK(x, y, z) = sen
x+yz
2
(certo?). Mostre que a mesma ´e Lipschitz-cont´ınua em rela¸c˜ao az com M = 1/2. Para tal estude a derivada parcial deK em rela¸c˜ao a z e
mostre que|∂zK(x, y, z)| ≤1/2para todox, y∈Ie todo z∈R. 6
• As equa¸c˜oes integrais de Volterra
A chamadaequa¸c˜ao integral de Volterrade segundo tipo, ou simplesmente equa¸c˜ao integral de Volterra, ´e a seguinte equa¸c˜ao integral:
u(x) = f(x) +
Z x
a
K(x, y, u(y))dy .
Acima u : I → R, I := [a, b] com b > a ´e a fun¸c˜ao inc´ognita e f e K s˜ao definidas tal como no caso das equa¸c˜oes
integrais de Fredholm. Note queK, que ´e chamada den´ucleoda equa¸c˜ao integral, ´e uma fun¸c˜ao de trˆes vari´aveis e que a inc´ognitau(y) aparece na posi¸c˜ao de seu terceiro argumento, dentro da integral. Note tamb´em que a equa¸c˜ao integral de Volterra difere da equa¸c˜ao integral de Fredholm pelo aparecimento de mais uma dependˆencia emx, a saber, no limite superior do intervalo de integra¸c˜ao.
Seja T a aplica¸c˜ao que leva C0(I) em si mesmo dada por
T(h)(x) = f(x) +
Z x
a
K(x, y, h(y))dy .
Note que se h´e uma fun¸c˜ao cont´ınua em I ent˜ao T(h) tamb´em ´e uma fun¸c˜ao cont´ınua em I. A equa¸c˜ao integral de Volterra pode ser ent˜ao entendida como a equa¸c˜ao de ponto fixo emC0(I) dada por
Como no caso da equa¸c˜ao integral de Fredholm, poder´ıamos procurar condi¸c˜oes que fa¸cam deT uma contra¸c˜ao no espa¸co m´etrico completoC0(I) pois, assim, poder´ıamos novamente evocar o Teorema de Ponto Fixo de Banach. Todavia, como veremos, podemos aqui proceder de um modo diferente do caso da equa¸c˜ao de Fredholm e obter condi¸c˜oes mais fracas para garantir a existˆencia de solu¸c˜ao. O que faremos n˜ao ´e procurar condi¸c˜oes que garantam queT seja uma contra¸c˜ao, mas provaremos queTm o ´e, para algumm >0. Assim, poderemos evocar a generaliza¸c˜ao do Teorema de Ponto Fixo
de Banach fornecida na Proposi¸c˜ao 21.1, p´agina 997.
Para tal, procedemos como antes e assumimos ser a fun¸c˜ao K Lipschitz-cont´ınua em rela¸c˜ao `a terceira vari´avel, ou seja, que valha a condi¸c˜ao descrita em (21.12). Daqui tiramos, parax∈I,
T(h)(x)−T(l)(x) =
Z x
a
h
K(x, y, h(y))−K(x, y, l(y))idy ,
donde segue que
|T(h)(x)−T(l)(x)| ≤
Z x
a
K(x, y, h(y))−K(x, y, l(y))dy
≤ M
Z x
a |
h(y)−l(y)|dy
≤ M(x−a) sup
y∈I|
h(y)−l(y)| = M(x−a)d∞(h, l).
A diferen¸ca entre essa ´ultima express˜ao e a express˜ao correspondente (21.13) para a equa¸c˜ao de Fredholm ´e que aqui surge o fator (x−a), que ainda depende de x, ao inv´es do fator constante (b−a). Como se ver´a no que segue, essa diferen¸ca ´e importante. Vamos agora provar por indu¸c˜ao que para todon∈Ntem-se
Tn(h)(x)−Tn(l)(x) ≤ Mn(x−a)
n
n! d∞(h, l), ∀x∈I . (21.14) Como j´a vimos que isso ´e verdade paran= 1, assumamos que essa rela¸c˜ao ´e v´alida para um certongen´erico. Ent˜ao,
Tn+1(h)(x)−Tn+1(l)(x) ≤
Z x
a
K(x, y, Tn(h)(y))−K(x, y, Tn(l)(y))dy
≤ M
Z x
a
Tn(h)(y)−Tn(l)(y)dy
≤ M
Z x
a
Mn(y−a)
n
n! dy
d∞(h, l)
= Mn+1(x−a)
n+1
(n+ 1)! d∞(h, l) , o que prova (21.14) para todon∈N, por indu¸c˜ao. Assim, temos tamb´em que
d∞(Tn(h), Tn(l)) ≤ Mn
(b−a)n
n! d∞(h, l), ∀n∈N.
Note-se agora que, para quaisquerM,aebfixos, existengrande o suficiente tal que
[M(b−a)]n
n! < 1
(por que?). Assim, para um tal n, Tn ser´a uma contra¸c˜ao. Pela generaliza¸c˜ao do Teorema de Ponto Fixo de Banach
• Equa¸c˜oes diferenciais de segunda ordem e as equa¸c˜oes integrais de Volterra
Vamos aqui tratar de mostrar algumas aplica¸c˜oes das equa¸c˜oes integrais de Volterra `a resolu¸c˜ao de problemas, muito freq¨uentemente encontrados em F´ısica, envolvendo equa¸c˜oes diferenciais de segunda ordem com certas condi¸c˜oes iniciais dadas.
Para tal, faremos uso da seguinte identidade, v´alida para qualquer fun¸c˜ao φ que seja pelo menos duas vezes dife-renci´avel em R:
φ(t) = φ(t0) + ˙φ(t0)(t−t0) +
Z t
t0
(t−t′) ¨φ(t′)dt′ . (21.15)
E. 21.12 Exerc´ıcio. Prove essa identidade. Sugest˜ao: use as identidades
φ(t) = φ(t0) +
Z t
t0
˙
φ(t′)dt′ e φ˙(t′) = ˙φ(t0) +
Z t′
t0
¨
φ(t′′)dt′′
e use integra¸c˜ao por partes. 6
Para ilustrar o uso que podemos fazer da identidade (21.15), vamos considerar a bem conhecida equa¸c˜ao do pˆendulo simples
¨
θ(t) = −gl sen (θ(t))
(parag >0 e l >0) com condi¸c˜oes iniciaisθ(0) =θ0 e ˙θ(0) =ω0. Substituindo o lado direito em (21.15) temos
θ(t) = θ0+ω0t−
g l
Z t
0
(t−t′) sen (θ(t′))dt′, (21.16) que ´e uma equa¸c˜ao integral de Volterra n˜ao-linear paraθ.
E. 21.13 Exerc´ıcio. Constate que o n´ucleo dessa equa¸c˜ao integral
K(t, t′, z) = −gl (t−t′) sen (z)
satisfaz a condi¸c˜ao de Lipschitz na terceira vari´avel paratet′ contidos em qualquer intervalo finito[−T, T],0< T <∞. 6
Deste ´ultimo exerc´ıcio conclu´ımos que a equa¸c˜ao do pˆendulo simples, com as condi¸c˜oes iniciais dadas, tem solu¸c˜ao ´
unica em qualquer intervalo finito [−T, T], 0< T <∞.
E. 21.14 Exerc´ıcio. Calcule as duas primeiras aproxima¸c˜oes para a solu¸c˜ao da equa¸c˜ao integral (21.16) seguindo o procedimento iterativo. Tome como ponto de partida a fun¸c˜ao identicamente nula: θ0(t) ≡0. Vocˆe consegue, olhando o
resultado do cˆomputo das duas primeiras aproxima¸c˜oes, interpretar fisicamente o que elas representam? 6
E. 21.15 Exerc´ıcio. Seja a conhecida equa¸c˜ao do pˆendulo simples no limite de pequenas oscila¸c˜oes:
¨
θ(t) = −gl θ(t),
com condi¸c˜oes iniciaisθ(0) =φ0 eθ˙(0) =ω0. Usando (21.15) transforme-a em uma equa¸c˜ao integral de Volterra e resolva-a pelo m´etodo iterativo, tomando como ponto de partida a fun¸c˜ao identicamente nula: θ0(t)≡0. Para tal, determine an-´esima
iteradaθn exatamente e mostre que a mesma converge a uma certa combina¸c˜ao linear decos(ωt)e sen (ωt), ondeω=
r
g l.
Para tal vocˆe precisar´a lembrar-se da s´erie de Taylor das fun¸c˜oes sen ecos. 6
Uma outra ilustra¸c˜ao do uso das equa¸c˜oes integrais de Volterra, e sua resolu¸c˜ao via Teorema de Ponto Fixo de Banach, pode ser encontrada no estudo das equa¸c˜oes diferenciais lineares de segunda ordem n˜ao-homogˆeneas com coeficientes n˜ao necessariamente constantes
¨
com condi¸c˜oes iniciais dadas do tipo u(0) = u0 e ˙u(0) =v0. Tais equa¸c˜oes s˜ao muito freq¨uentemente encontradas em problemas de F´ısica-Matem´atica e o estudante certamente j´a as viu surgir, por exemplo, em Mecˆanica Cl´assica.
Nosso objetivo ´e transformar o problema de determinar a solu¸c˜ao u da equa¸c˜ao diferencial com condi¸c˜oes iniciais acima no problema de resolver uma equa¸c˜ao integral de Volterra equivalente.
H´a mais de uma maneira de se obter uma tal equa¸c˜ao integral a partir de (21.17). Para o prop´osito de demonstrar existˆencia e unicidade da solu¸c˜ao, com condi¸c˜oes pouco exigentes sobre as fun¸c˜oes a, b e c, vamos considerar primeiro uma equa¸c˜ao integral para ¨u. Uma outra equa¸c˜ao integral diretamente parauser´a vista depois.
Vamos supor aqui que haja um intervalo fechado finito I = [−T, T], 0 < T < ∞, onde as fun¸c˜oes a, b e c que aparecem acima sejam cont´ınuas. Pelo teorema fundamental do c´alculo e pela identidade (21.15), temos que
˙
u(t) = v0+
Z t
0 ¨
u(t′)dt′, (21.18)
u(t) = u0+v0t+
Z t
0
(t−t′) ¨u(t′)dt′ . (21.19) Substituindo-se em (21.17)ue ˙upelo lado direito de (21.18) e (21.19), respectivamente, teremos
¨
u(t) = f(t) +
Z t
0
K(t, t′) ¨u(t′)dt′ , (21.20)
onde
f(t) := c(t)−(b(t)t+a(t))v0−b(t)u0 (21.21)
e
K(t, t′) := −a(t)−b(t)(t−t′). (21.22)
E. 21.16 Exerc´ıcio. Verifique tudo isso. 6
A equa¸c˜ao (21.20) ´e claramente uma equa¸c˜ao de Volterra linear para ¨uque, pelas hip´oteses de continuidade sobre as fun¸c˜oesa,b ec, possui solu¸c˜ao ´unica no intervaloI, dado que nesse intervaloK´e limitado (por que?). A fun¸c˜ao upode ser ent˜ao obtida integrando-se duas vezes a solu¸c˜ao ¨uda equa¸c˜ao (21.20) ou usando-se novamente a identidade (21.15).
O que vimos acima pode ser ent˜ao resumido no seguinte teorema:
Teorema 21.3 Sejam as fun¸c˜oesa,b eccont´ınuas no intervalo I= [−T, T],T >0. Ent˜ao, nesse intervalo, a solu¸c˜ao da equa¸c˜ao diferencial linear de segunda ordem n˜ao-homogˆenea
¨
u(t) +a(t) ˙u(t) +b(t)u(t) = c(t), (21.23)
com condi¸c˜oes iniciais dadas do tipou(0) =u0 eu˙(0) =v0, existe e ´e ´unica. 2
´
E not´avel que seja suficiente exigir t˜ao pouco (s´o continuidade dos coeficientes) para garantir-se existˆencia e unicidade da equa¸c˜ao acima. H´a fun¸c˜oes cont´ınuas que n˜ao s˜ao diferenci´aveis em parte alguma (vocˆe conhece um exemplo?) ou mesmo algumas que s˜ao crescentes mas tˆem derivada nula quase em toda parte (a fun¸c˜ao de Cantor tratada no cap´ıtulo de teoria da medida ´e um exemplo) e mesmo com tais fun¸c˜oes nos coeficientes de (21.17) tem-se garantida existˆencia e unicidade da solu¸c˜ao. Para um outro tratamento da equa¸c˜ao (21.17) usando a chamada s´erie de Dyson, vide Cap´ıtulo 8. A equa¸c˜ao integral (21.20) ´e uma equa¸c˜ao para ¨u. O leitor pode estar se perguntando se n˜ao podemos ter uma equa¸c˜ao integral diretamente parau. A resposta ´e positiva. Fazendo mais uma vez uso da identidade (21.15), temos
u(t) = u0+v0t+
Z t
0
(t−t′)h−a(t′) ˙u(t′)−b(t′)u(t′) +c(t′)idt′ . (21.24) Integrando-se por partes o termo com−(t−t′)a(t′) ˙u(t′), obtemos
u(t) = f(t) +
Z t
0
onde agora
f(t) := u0+t(v0+a(0)u0) +
Z t
0
(t−t′)c(t′)dt′ (21.26) e
K(t, t′) := −a(t′) + (t−t′) a′(t′)−b(t′). (21.27)
E. 21.17 Exerc´ıcio. Verifique isso. 6
Novamente, se a, a′ e bforem cont´ınuas no intervalo I, assim como a fun¸c˜ao
Z t
0
(t−t′)c(t′)dt′, ent˜ao a existˆencia e a unicidade da solu¸c˜ao da equa¸c˜ao tratada estar˜ao garantidas no mesmo intervaloI. Note-se que aqui podemos admitir
tamb´em casos em quecn˜ao ´e cont´ınua, desde que
Z t
0
(t−t′)c(t′)dt′ o seja.
E. 21.18 Exerc´ıcio. Seja a equa¸c˜ao do pˆendulo simples for¸cado no limite de pequenas oscila¸c˜oes
¨
θ(t) +ω02θ(t) = f(t)
onde f representa (a menos de uma constante) uma for¸ca externa dependente do tempo. Considere o caso em que f ´e
peri´odica de per´ıodoT >0,f(t) =f(t+nT),∀n∈Z, comf dada no intervalo[0, T)por
f(t) =
f0, se 0≤t≤T /2,
0, se T /2< t < T .
Transforme essa equa¸c˜ao em uma equa¸c˜ao integral de Volterra equivalente e mostre como a mesma pode ser resolvida
iterativamente. 6
E. 21.19 Exerc´ıcio. O mesmo para a equa¸c˜ao do pˆendulo simples for¸cado
¨
θ(t) +ω2senθ(t) = f(t)
com a mesmaf dada acima. 6
21.4
Aplica¸
c˜
oes `
a Teoria das Equa¸
c˜
oes Diferenciais Ordin´
arias
Iremos agora tratar de algumas das mais importantes aplica¸c˜oes do Teorema de Ponto Fixo de Banach, a saber, `a teoria das equa¸c˜oes diferenciais ordin´arias (EDO’s). O principal resultado que obteremos ´e o c´elebre Teorema de Picard-Lindel¨of que fornece condi¸c˜oes suficientes para existˆencia e unicidade de solu¸c˜oes de EDO’s. Obteremos tamb´em resultados sobre a dependˆencia de solu¸c˜oes com rela¸c˜ao a condi¸c˜oes iniciais e a parˆametros. Trataremos de equa¸c˜oes diferenciais de uma classe bastante geral, a saber, equa¸c˜oes diferenciais em espa¸cos de Banach, de modo a incluir sistemas de equa¸c˜oes diferenciais ordin´arias definidas emRn eCn. O leitor ´e convidado a uma leitura pr´evia do Cap´ıtulo 6, p´agina 292, que
trata de tais assuntos de forma introdut´oria.
21.4.1
O Teorema de Picard-Lindel¨
of
Esta subse¸c˜ao foi escrita conjuntamente com Daniel A. Cortez
o Teorema de Ponto Fixo de Banach ´e crucial para a demonstra¸c˜ao de um famoso teorema sobre existˆencia e unicidade de solu¸c˜oes para EDOs devido a Picard15e Lindel¨of16.
Antes de entrarmos nos detalhes t´ecnicos, gostar´ıamos de fazer uma pequena nota hist´orica: originalmente, a de-monstra¸c˜ao de existˆencia e unicidade de solu¸c˜oes para EDOs se deve a Lindel¨of. Entretanto, o m´etodo que aplicaremos aqui para a sua demonstra¸c˜ao, fazendo uso expl´ıcito do Teorema de Ponto Fixo de Banach, deve-se a Picard17. Esses trabalhos datam da d´ecada de 90 do S´eculo XIX.
No que segue procuraremos apresentar uma vers˜ao bastante geral do teorema sobre existˆencia e unicidade de solu¸c˜oes para EDOs v´alido para equa¸c˜oes definidas em espa¸cos de BanachB. Consideremos, a saber, o seguinte tipo de equa¸c˜ao diferencial de primeira ordem
˙
x(t) = f(t, x(t)), (21.28)
onde t ∈ R e x : R → B representa uma fun¸c˜ao de uma vari´avel real assumindo valores em um espa¸co de Banach
B. Acima, f : R×B → B ´e uma fun¸c˜ao de t ∈R e x∈ B sobre a qual suporemos certas hip´oteses convenientes de continuidade etc.
O leitor deve ter em mente o caso em que B=R(ouB=C), quando a equa¸c˜ao acima representa uma equa¸c˜ao de
primeira ordem de uma fun¸c˜ao real (complexa) desconhecidax(t), ou o caso em queB =Rn (ou B =Cn), quando a
equa¸c˜ao acima representa um sistema de equa¸c˜oes de primeira ordem de um vetor real (complexo) desconhecido de n
componentes: x(t) = (x1(t), . . . , xn(t)). Tais sistemas foram discutidos no Cap´ıtulo 6, p´agina 292.
Umproblema de valor inicialconsiste de uma equa¸c˜ao diferencial ordin´aria, como a dada acima, mais umacondi¸c˜ao inicial
x(t0) = x0, (21.29)
ondet0∈Rex0∈Bs˜ao dados. Com essa pequena defini¸c˜ao, estamos prontos para enunciar o teorema de existˆencia e unicidade de Picard-Lindel¨of:
Teorema 21.4 (Teorema de Picard-Lindel¨of. Existˆencia e unicidade de solu¸c˜oes de EDO’s) Sejaf :R×B→ B n˜ao-identicamente nula e cont´ınua na regi˜ao fechada
R ≡ Ra, b, t0, x0 := {(t, x)∈R×B: |t−t0| ≤ a, kx−x0k ≤ b}, (21.30)
para certos valores a >0 eb >0, onde k · k representa a norma do espa¸co de BanachB. Claro ´e quef ´e limitada em
R. Sejac >0definida por
c := sup
(t, x)∈Rk
f(t, x)k. (21.31)
Suponha ainda quef seja Lipschitz-cont´ınua emRcom rela¸c˜ao ao seu segundo argumento, ou seja, existe uma constante
k≥0 tal que para todos (t, x)e(t, y)∈R valha
kf(t, x)−f(t, y)k ≤ kkx−yk. (21.32)
Ent˜ao, pelo menos no intervalo fechado[t0−β, t0+β], onde
β := min
a, b
c
, (21.33)
o problema de valor inicial descrito pelas rela¸c˜oes x˙(t) =f(t, x(t)) com x(t0) = x0 apresenta uma solu¸c˜ao, a qual ´e ´
unica.
Uma condi¸c˜ao suficiente para que a condi¸c˜ao de Lipschitz acima se cumpra ´e que ∂yf(t, y) exista em todo R e l´a
seja limitada, em cujo caso a constante de Lipschitz seria dada por k:= sup (t, y)∈Rk
∂yf(t, y)k. 2
Antes de apresentarmos a demonstra¸c˜ao, gostar´ıamos de notar que existem diversos outros teoremas que garantem existˆencia e unicidade de solu¸c˜ao de problemas de valor inicial como os discutidos acima com condi¸c˜oes distintas, mas eventualmente mais espec´ıficas, sobre a fun¸c˜aof. Para uma lista mais ampla de diversos teoremas sobre existˆencia e/ou
15
Charles ´Emile Picard (1856–1941).
16
Ernst Leonard Lindel¨of (1870–1946).
17
unicidade de solu¸c˜ao para EDOs, vide [1]. Na Se¸c˜ao 6.3, p´agina 303, apresentamos exemplos de aplica¸c˜ao do Teorema de Picard-Lindel¨of e exemplos nos quais o mesmo n˜ao se aplica, tendo por conseq¨uˆencia a inexistˆencia ou n˜ao-unicidade da solu¸c˜ao.
Descrevamos agora a t´ecnica a ser utilizada em nossa demonstra¸c˜ao. O primeiro passo consiste em convertermos a equa¸c˜ao diferencial (21.28) em uma equa¸c˜ao integral, definindo-se para isso uma transforma¸c˜aoT. Em seguida, sob as hip´oteses do teorema, mostraremos que existe uma certa potˆencia da transforma¸c˜aoT, digamosTm,m≥1, tal queTm
´e uma contra¸c˜ao. Feito isso, utilizando o Teorema de Ponto Fixo de Banach em sua vers˜ao generalizada (Proposi¸c˜ao 21.1, p´agina 997), concluiremos a existˆencia e a unicidade do ponto fixo para a transforma¸c˜aoT, o qual ser´a justamente a solu¸c˜ao de nosso problema. Faremos uso nessa demonstra¸c˜ao, de dois resultados pr´evios, que escrevemos sob a forma de dois lemas. O primeiro deles, ´e a Proposi¸c˜ao 20.6, p´agina 954, que recordamos aqui.
Lema 21.1 Seja C([a, b], B) o espa¸co das fun¸c˜oes cont´ınuas definidas no compacto [a, b]⊂R assumindo valores no
espa¸co e Banach B. Ent˜ao,C([a, b], B)´e um espa¸co de Banach em rela¸c˜ao `a m´etrica do supremo, definida por
d∞(f, g) := sup
t∈[a, b]k
f(t)−g(t)k,
paraf, g∈C([a, b], B). 2
Isso segue do Corol´ario 20.1, p´agina 967. A demonstra¸c˜ao ´e tamb´em idˆentica `a da Proposi¸c˜ao 20.6, p´agina 954, e n˜ao precisa se repetida aqui. O segundo lema que utilizaremos ´e o seguinte.
Lema 21.2 Sejam [a, b] ⊂ R e para κ > 0 fixo, seja Ce ⊂ C([a, b], B) o subespa¸co de C([a, b], B) formado pelas fun¸c˜oesx: [a, b]→Btais que
kx(t)−x0k ≤ κ , ∀t∈[a, b]. (21.34)
Ent˜ao,Ce´e um subespa¸co fechado de C([a, b], B). 2
Prova. Tudo o que precisamos fazer ´e mostrar que qualquer seq¨uˆencia convergente (xn) de elementos deCe converge para
umx∗ que tamb´em est´a emCe (se vocˆe n˜ao entendeu a raz˜ao dessa afirma¸c˜ao, confira a Proposi¸c˜ao 20.7 da p´agina 961,
ou, equivalentemente, a Proposi¸c˜ao 22.11, p´agina 1041). De fato, comoxn∈Ce para todon∈N, temos kxn(t)−x0k ≤ κ , ∀t∈[a, b].
J´a que essa express˜ao n˜ao depende de t, podemos escrever
d∞(xn, x0) = sup
t∈Ik
xn(t)−x0k ≤ κ . (21.35)
Por outro lado, como por hip´otese a seq¨uˆencia (xn) converge parax∗, ent˜ao, dadoε >0, existeNε>0 tal que para todo
n > Nεvale:
d∞(xn, x∗) ≤ ε . (21.36)
Vamos agora utilizar a desigualdade triangular:
d∞(x∗, x0) ≤ d∞(x∗, xn) +d∞(xn, x0) ≤ ε+κ , (21.37) onde, na ´ultima desigualdade, fizemos uso das rela¸c˜oes (21.35) e (21.36). Uma vez que (21.37) ´e verdadeira para qualquer
ε >0, conclu´ımos ent˜ao que
kx∗(t)−x
0k ≤ sup
t∈[a, b]k
x∗(t)−x
0k = d∞(x∗, x0) ≤ κ , ∀t∈[a, b], mostrando quex∗ tamb´em pertence a Ce.
Prova do Teorema 21.4. SejaJ o intervalo [t0−β, t0+β]⊂Re considere o espa¸coC(J, B) das fun¸c˜oes cont´ınuas em
J assumindo valores emB, dotado com a m´etrica do supremo. Considere ainda o subespa¸coCe⊂C(J, B) formado pelo conjunto das fun¸c˜oesx(t) tais que
Pelo Lema 21.1, sabemos queC(J, B) ´e um espa¸co de Banach. Por outro lado, do Lema 21.2 vemos que o subespa¸co
e
C ´e fechado em C(J, B). Logo, da Proposi¸c˜ao 20.7 da p´agina 961 (ou equivalentemente, da Proposi¸c˜ao 22.11, p´agina 1041), conclu´ımos imediatamente queCe tamb´em ´e um espa¸co m´etrico completo. Essa ´e uma conclus˜ao importante da qual faremos uso adiante.
Definamos agora uma transforma¸c˜aoT pela seguinte rela¸c˜ao:
(T x)(t) := x0+
Z t
t0
f(τ, x(τ))dτ . (21.39)
Vamos mostrar que T ´e uma aplica¸c˜ao que leva Ce emCe, ou seja, T :Ce →Ce. De fato, para τ ∈J ex(τ) ∈Ce, como
cβ≤b, conclu´ımos de (21.30) que (τ, x(τ))∈R. Logo a curvaJ ∋τ7→(τ, x(τ))∈R×B´e cont´ınua e est´a inteiramente contida na regi˜ao R, onde f ´e cont´ınua por hip´otese. Assim,J ∋τ7→f(τ, x(τ))∈B ´e cont´ınua e a sua integral estar´a bem definida. Conclu´ımos da´ı que T pode ser aplicada a fun¸c˜oes de Ce. Agora vamos mostrar que T x´e novamente um elemento emCe.
Utilizando a rela¸c˜ao (21.31) de limita¸c˜ao da fun¸c˜aof no retˆanguloR, tem-se parax∈Ce,
k(T x)(t)−x0k =
Z t
t0
f(τ, x(τ))dτ
≤
Z t
t0k
f(τ, x(τ))kdτ ≤ c|t−t0| ≤ cβ ,
provando que T xdista de x0 menos quecβ, uma das condi¸c˜oes definidores do conjuntoCe. Resta-nos provar queT x´e cont´ınua casox∈Ce. Para tal, j´a vimos que parax∈Cefixo,J ∋τ7→f(τ, x(τ))∈B´e igualmente cont´ınua e, portanto, limitada, ou seja, existeNx>0 tal quekf(τ, x(τ))k ≤Nxpara todoτ∈J. Logo, parat, t′ ∈J, comt′≥t
k(T x)(t′)−(T x)(t)k =
Z t′
t
f(τ, x(τ))dτ
≤
Z t′
t k
f(τ, x(τ))kdτ ≤ Nx|t′−t|.
Como o lado direito vai a zero parat→t′ provou-se que (T x)(t) ´e cont´ınua como fun¸c˜ao de t∈J. Assim, T x∈Ce se
x∈Ce.
Chegamos agora ao ponto crucial de nossa demonstra¸c˜ao. Observe que sex(t)∈Cesatisfaz o nosso problema de valor inicial (rela¸c˜oes (21.28) e (21.29)), ent˜ao certamentex(t) pode ser escrita como
x(t) = (T x)(t) = x0+
Z t
t0
f(τ, x(τ))dτ . (21.40)
Para tal, procedemos como no tratamento da equa¸c˜ao integral de Volterra, p´agina 1004, assumindo que a fun¸c˜aof
seja Lipschitz-cont´ınua em rela¸c˜ao `a segunda vari´avel, ou seja, que valha a condi¸c˜ao descrita em (21.32). Parat∈J, e
h, l∈Ce,
(T h)(t)−(T l)(t) =
Z t
t0
f(τ, h(τ))−f(τ, l(τ))dτ ,
donde segue que (assumimos sem perda de generalidade que t≥t0)
k(T h)(t)−(T l)(t)k ≤
Z t
t0k
f(τ, h(τ))−f(τ, l(τ))k dτ
(21.32)
≤ k
Z t
t0k
h(τ)−l(τ)kdτ
≤ k|t−t0| sup
τ∈Jk
h(τ)−l(τ)k = k|t−t0|d∞(h, l).
Vamos agora provar por indu¸c˜ao que para todo n∈Ntem-se
k(Tnh)(x)−(Tnl)(x)k ≤ kn|t−t0|n
Como j´a vimos que isso ´e verdade paran= 1, assumamos que essa rela¸c˜ao ´e v´alida para um certongen´erico. Ent˜ao,
(Tn+1h)(t)−(Tn+1l)(t) ≤
Z t
t0k
f(τ, (Tnh)(τ))−f(τ, (Tnl)(τ))k dτ
≤
Z t
t0
kk(Tnh)(τ)−(Tnl)(τ)kdτ
≤ k
Z t
t0
kn|τ−t0|
n
n! dτ
d∞(h, l)
= kn+1|t−t0|
n+1
(n+ 1)! d∞(h, l) ,
o que prova (21.41) para todon∈Ne todot∈J, por indu¸c˜ao. Assim, temos tamb´em que
d∞(Tnh, Tnl) ≤ (kβ)
n
n! d∞(h, l), ∀n∈N. (21.42) Note-se agora que, para quaisquer k e β fixos, existe n grande o suficiente tal que [kβn!]n < 1. Assim, para um tal
n, Tn ser´a uma contra¸c˜ao do espa¸co completo Ce e si mesmo. Nessas condi¸c˜oes, podemos certamente evocar a vers˜ao
generalizada do Teorema de Ponto Fixo de Banach fornecida pela Proposi¸c˜ao 21.1, p´agina 997, garantindo a existˆencia e a unicidade de x(t) ∈ Ce, satisfazendo (21.40). Mas isso implica justamente a existˆencia e unicidade de solu¸c˜ao em
C(J, B) do problema de valor inicial considerado, demonstrando o Teorema 21.4.
*
No Cap´ıtulo 6, especialmente na Se¸c˜ao 6.3.1, p´agina 305 e seguintes, s˜ao discutidos exemplos de equa¸c˜oes diferenciais ordin´arias que violam as condi¸c˜oes do Teorema de Picard-Lindel¨of.
21.4.2
Generalizando o Teorema de Picard-Lindel¨
of. Solu¸
c˜
oes Globais
Nesta sub-se¸c˜ao demonstraremos um teorema que fornece condi¸c˜oes suficientes para a existˆencia de solu¸c˜oes globais de problemas de valor inicial. O primeiro teorema abaixo ´e um resultado preparat´orio que estende o Teorema de Picard-Lindel¨of, Teorema 21.4, p´agina 1008.
Em toda esta se¸c˜ao, B denota um espa¸co de Banach com norma k · k e, para a > 0 e t0 ∈ R, denotamos por
Fa, t0 ⊂R×Ba faixa de larguraacentrada emt0 definida por
Fa, t0 := {(t, y)∈R×B: |t−t0| ≤ a , y∈B arbitr´ario} .
Teorema 21.5 Suponhamos que para um certo a > 0 e para t0 ∈ R tenhamos uma fun¸c˜ao f : Fa, t0 → B que seja
cont´ınua. Suponhamos tamb´em quef ´e Lipschitz-cont´ınua em rela¸c˜ao `a segunda vari´avel, ou seja, existe uma constante
ka (denominada constante de Lipschitz) tal que para todos (t, y), (t, v)∈Fa, t0 vale kf(t, y)−f(t, v)k ≤kaky−vk.
Ent˜ao, para qualquerx0∈B, o problema de valor inicial x˙(t) =f(t, x(t))comx(t0) =x0 apresenta uma solu¸c˜ao ´unica v´alida para todot∈[t0−a, t0+a].
Uma condi¸c˜ao suficiente para que a condi¸c˜ao de Lipschitz acima se cumpra ´e que∂yf(t, y)exista em todo ponto de
Fa, t0 e l´a seja limitada, em cujo caso a constante de Lipschitz pode ser escolhida como ka:= sup
(t, y)∈Fa, t0
k∂yf(t, y)k. 2
Prova. A demonstra¸c˜ao segue passos semelhantes aos da prova do Teorema de Picard-Lindel¨of. SejaJo intervalo fechado [t0−a, t0+a]. Considere o espa¸coC(J, B) das fun¸c˜oes cont´ınuas emJ assumindo valores emB, dotado com a m´etrica do supremo. Pelo Lema 21.1, sabemos queC(J, B) ´e um espa¸co de Banach. Como na prova do Teorema de Picard-Lindel¨of, definimos a transforma¸c˜ao
(T x)(t) := x0+
Z t
t0
f(τ, x(τ))dτ . (21.43)
Vamos mostrar que T ´e uma aplica¸c˜ao que leva C(J, B) em C(J, B). De fato, para τ ∈ J e x ∈ C(J, B) tem-se obviamente que (τ, x(τ))∈Fa, t0. Logo, a curvaJ ∋τ 7→(τ, x(τ))∈R×B´e cont´ınua e est´a inteiramente contida na
regi˜ao Fa, t0, ondef ´e cont´ınua por hip´otese. Assim, J ∋τ 7→f(τ, x(τ))∈ B´e cont´ınua e a sua integral estar´a bem definida. Conclu´ımos da´ı queT pode ser aplicada a fun¸c˜oes deC(J, B). Agora vamos mostrar queT x´e novamente um elemento emC(J, B) e para tal ´e preciso provar queT x´e cont´ınua casox∈C(J, B). Parax∈C(J, B) fixo, vimos que
J ∋τ 7→f(τ, x(τ))∈B´e igualmente cont´ınua e, portanto, limitada, ou seja, existeNx>0 tal que kf(τ, x(τ))k ≤Nx
para todo τ∈J. Logo, parat, t′∈J, comt′ ≥t
k(T x)(t′)−(T x)(t)k =
Z t′
t
f(τ, x(τ))dτ
≤
Z t′
t k
f(τ, x(τ))kdτ ≤ Nx|t′−t|.
Como o lado direito vai a zero parat→t′ provou-se que (T x)(t) ´e cont´ınua como fun¸c˜ao det∈J. Assim,T x∈C(J, B)
sex∈C(J, B).
Para provar queT possui um ponto fixo ´unico emC(J, B) segue-se os mesmos passos da demonstra¸c˜ao do Teorema de Picard-Lindel¨of que conduziram `a (21.42), que no presente caso assume a forma
d∞(Tnh, Tnl) ≤
(aκa)n
n! d∞(h, l), ∀n∈N. (21.44) Note-se agora que, para quaisquera eκa fixos, existengrande o suficiente tal que [aκa]
n
n! < 1. Assim, para um taln,
Tn ser´a uma contra¸c˜ao do espa¸co completoC(J, B) e si mesmo. Nessas condi¸c˜oes, podemos certamente evocar a vers˜ao
generalizada do Teorema de Ponto Fixo de Banach fornecida pela Proposi¸c˜ao 21.1, p´agina 997, garantindo a existˆencia e a unicidade de x(t)∈C(J, B), satisfazendo (21.40). Mas isso implica justamente a existˆencia e unicidade de solu¸c˜ao emC(J, B) do problema de valor inicial considerado, demonstrando o Teorema 21.5.
Chegamos finalmente ao
Teorema 21.6 (Existˆencia e unicidade de solu¸c˜oes globais) Seja f :R×B→B cont´ınua em todoR×B. Supo-nhamos tamb´em que para todo a >0, f seja Lipschitz-cont´ınua em rela¸c˜ao `a segunda vari´avel na faixa Fa, t0, ou seja, para cada a >0 existe uma constanteka (eventualmente dependente de ae denominada constante de Lipschitz) tal que
para todos(t, y), (t, v)∈Fa, t0 valekf(t, y)−f(t, v)k ≤kaky−vk. Ent˜ao, para qualquer x0∈B, o problema de valor inicial x˙(t) =f(t, x(t))comx(t0) =x0 apresenta uma solu¸c˜ao ´unica v´alida para todot∈R.
Uma condi¸c˜ao suficiente para que a condi¸c˜ao de Lipschitz acima se cumpra ´e que ∂yf(t, y) exista em todo R×B
e seja limitada em cada faixa Fa, t0, a > 0, em cujo caso as constantes de Lipschitz podem ser escolhidas como ka :=
sup (t, y)∈Fa, t0
k∂yf(t, y)k. 2
Prova. A prova ´e imediata pelo Teorema 21.5.
Sugerimos aqui os exerc´ıcios da p´agina 310 e os coment´arios que se lhes seguem.