The goodness of the forecasts is measured statistically and from the point of view of the travel time information system. The neural models were also better when goodness was measured in terms of travel time information.
1 JOHDANTO
2 TUTKIMUKSEN TAUSTAA
Tutkimuskohteet
Matka-aikaennusteita tutkittaessa painopiste oli valtatie 4:n malleissa, koska tie on vilkkaampi, kulkee koko testialueen yhdestä päästä toiseen kuin Kehä I:een ja alue on jaettu useisiin osalinkkeihin. . kuin Ring I. Matka-ajan estimointia pistemittauksilla tutkittiin vain renkaan I tiedoilla, koska kehällä I on LAM-indikaattori kahdella peräkkäisellä kamera-asemalla, toisin kuin valtatiellä 4, jossa on vain yksi LAM-asema.
Aineistot
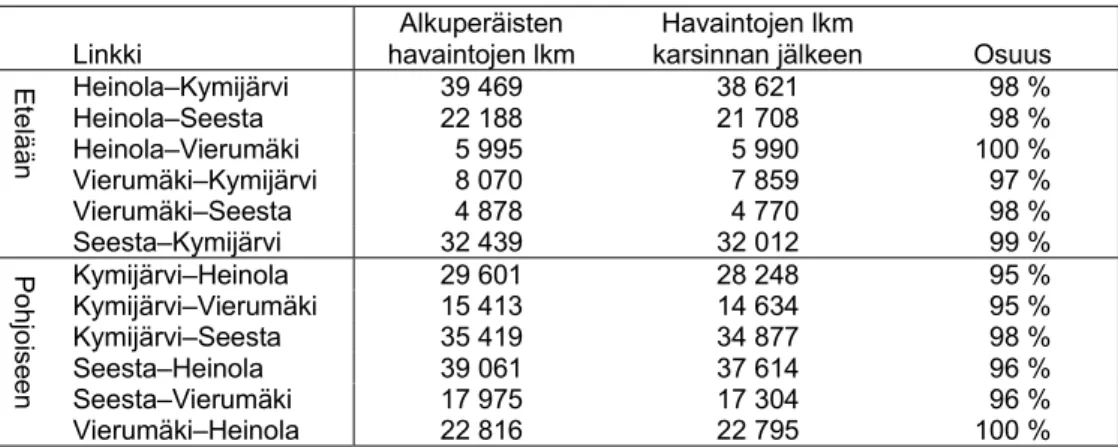
Tästä syystä tiedoista on poistettu matka-aikahavainnot, jotka poikkeavat yli 33 prosenttia seitsemän havainnon liukuvasta keskiarvosta (havaittu havainto on havaintojen keskellä). Kun tiedoista poistettiin matka-aikahavainnot, jotka poikkesivat yli 33 prosenttia seitsemän havainnon liukuvasta keskiarvosta tai olivat muuten selvästi virheellisiä, alkuperäisistä havainnoista jäi jäljelle 88-95 prosenttia.
Tutkimusasetelma
Seulontaprosessissa kaikki havainnot, jotka poikkesivat liukuvasta keskiarvosta yli 33 prosenttia, tulkittiin poikkeaviksi, elleivät ne olleet osa vahvaa muutosrintamaa. Näihin muuten selvästi virheellisiin havaintoihin sisältyivät muun muassa havainnot, jotka on kerätty aikana, jolloin toisen kameran kello oli väärä, mikä johti epärealistisen lyhyisiin matka-aikoihin.
3 KIRJALLISUUSKATSAUS
- Piste- ja matkanopeuden välinen vertailu(Haugen 1996) Piste- ja matkanopeuden välisiä eroja on selvitetty muun muassa Norjassa
- Linkkiparametrien estimoiminen anturiajoneuvojen avulla (Westerman 1995)
- Matka-ajan määrittäminen induktioilmaisimien avulla
- Suora matka-ajan mittaaminen (Haugen 1996)
Assosiaatioparametrien estimoiminen pelkällä yksinkertaisella keskiarvoestimoinnilla on kuitenkin kyseenalaista, varsinkin kun otos on pieni. Vertailu voidaan tehdä myös ajoneuvoluokittain, mikä parantaa menetelmän tarkkuutta varsinkin kun eri ajoneuvoluokat ajavat hyvin eri nopeuksilla.

4 MALLIT
MLP-neuroverkkomallit
Harjoittelu lopetettiin, kun harjoituskierrosten maksimimäärä saavutettiin, kun gradientin arvo tai keskineliövirhe pieneni riittävästi tai kun kalibrointitietojen keskineliövirhe lakkasi laskemasta.
Sumea logiikka mallintamisvälineenä .1 Sumeat joukot
- Sumeat järjestelmät ja sumea päättely Gödelin algebran mukaisesti
- Lukasiewiczin algebra ja sumea similaarisuus
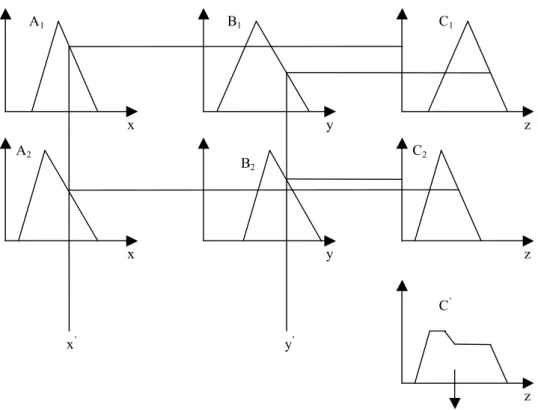
Sumean järjestelmän kuvaus on joukko kielellisiä sääntöjä, joiden jokaisen validiteettiastetta arvioidaan samanaikaisesti sumean päättelyn avulla. Sumean järjestelmän rakentaminen eroaa perinteisestä järjestelmämallintamisesta siinä, että matemaattinen malli korvataan sanallisella, sääntöpohjaisella kuvauksella.
5 NYKYINEN TIEDOTUSJÄRJESTELMÄ VT 4:LLÄ
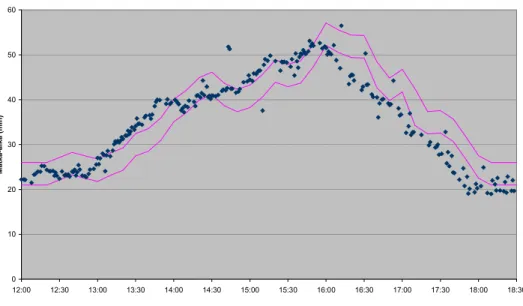
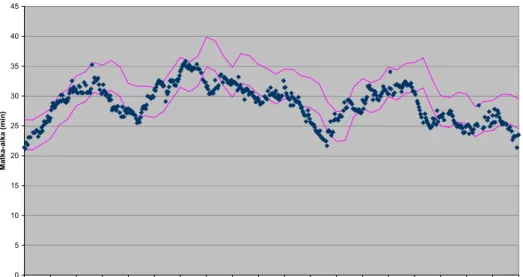
32,9 prosenttia ajasta osoitti liian pitkiä matka-aikoja 49,3 prosenttia ajasta ja liian lyhyitä matka-aikoja 29,4 prosenttia ajasta. Nykyisen tietojärjestelmän mukaan ennustettu matka-aika (ylä- ja alaraja) ja mitatut arvot (pisteet) kesän ruuhka-aikana 25.6.2000 Heinola–Kymijärvi -linkillä.
6 NEUROMALLIT
Syötteiden valinta .1 Valtatien 4 mallit
- Kehä I:n mallit
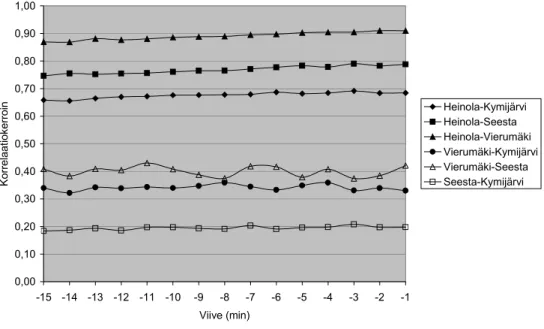
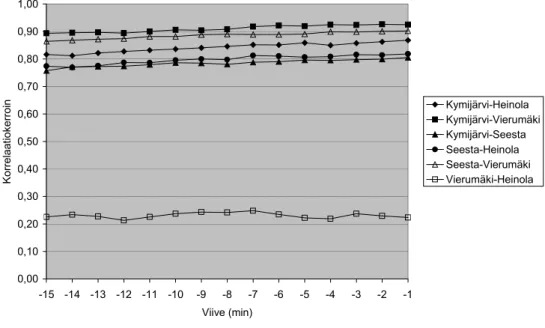
Vierumäki - Heinola -yhteyttä lukuun ottamatta kaikkien Kymijärvi - Heinola -suunnan yhteyksien matka-ajat korreloivat varsin vahvasti Kymijärvi - Heinola -yhteyden ennustettavan keskimääräisen matka-ajan kanssa (kuva 9). Eri osayhteyksien keskimääräisen matka-ajan korrelaatio Kymijärvi-Heinola-yhteydelle eri viiveellä lähtevien ajoneuvojen keskimääräiseen matka-aikaan. Vierumäen LAM-pisteessä mitatun keskinopeuden, nopeuden keskihajonnan ja liikennemäärän korrelaatio Heinola-Kymijärvi-yhteydelle eri viiveellä lähtevien ajoneuvojen keskimääräiseen matka-aikaan.
Vierumäen LAM-pisteessä mitatun keskinopeuden, nopeuden keskihajonnan ja liikenteen volyymin korrelaatio Kymijärvi–Heinola-reitiltä eri viivästyksillä lähtevien ajoneuvojen keskimääräiseen matka-aikaan. Hollolan LAM-pisteessä mitatun keskinopeuden, nopeuden keskihajonnan ja liikenteen volyymin korrelaatio Kymijärvi–Heinola-yhteydellä eri viivästyksin lähtevien ajoneuvojen keskimääräiseen matka-aikaan. Ainoa poikkeus suunnasta oli Vierumäki–Heinola-linkin matka-aika, joka korreloi huonosti kaikkien muiden yhteyksien matka-aikoihin.
Vierumäen (601) ja Hollolan (424) LAM-pisteiden osayhteyksien keskimääräisten matka-aikojen ja liikennemäärän (q), keskinopeuden (v) ja nopeuden keskihajonnan (kh) korrelaatiokertoimet Kymijärvi – Heinola -suunnassa . Eri osaliittymille lähtevien ajoneuvojen keskimääräisten matka-aikojen sekä Vierumäen (601) ja Hollolan (424) LAM-pisteiden liikennetietojen korrelaatio osaliittymien päättymistä edeltävän minuutin aikana saapuvien ajoneuvojen keskimääräiseen matka-aikaan. Kymijärvi – Heinola suuntaan.
Ennusteet ja estimaatit .1 Valtatie 4
- Kehä I
Erilaisten ennustemallien hyvyys Heinola–Kymijärvi (Etelä) suunnassa keskineliövirheellä (MSE), virheellä (ME), virheen absoluuttisella arvolla (MAE), suhteellisella virheellä (MRE), suhteellisen virheen absoluuttisella arvolla (MARE) ja asteella sopimuksen (R ) ), kuten on määritelty. Kymijärvi–Heinola (pohjoinen) suunnan eri ennustemallien hyvyys määritettynä keskineliövirheellä (MSE), virheellä (ME), virheen absoluuttisella arvolla (MAE), suhteellisella virheellä (MRE), suhteellisen virheen absoluuttisella arvolla (MARE) ja sopimusaste (R). Kymijärvi–Heinola-reitin eri ennustemallien hyvyys mitattuna oikein ennustettujen (o %), aliarvioitujen (p %) ja yliarvioitujen (s %) matka-aikojen osuutena kesän 2000 ja 2001 kokonaistiedoissa.
Heinola-Kymijärven suunnan eri ennustemallien kyky ennustaa ruuhkaliikennettä mitattuna oikein ennustettujen (o %), aliarvioitujen (p %) ja yliarvioitujen (s %) matka-aikojen osuutena. Kymijärvi – Heinola -suunnan eri ennustemallien kyky ennustaa ruuhkaliikennettä mitattuna oikein ennustettujen (o %), liian lyhyiden (p %) ja liian pitkien (s %) matka-aikojen osuutena. Raskaassa liikenteessä neuromallit (taulukot 23 ja 24) olivat selvästi nykyistä järjestelmää parempia (Heinola-Kymijärvi 79 prosenttia ja Kymijärvi-Heinola 71 prosenttia).
Neuromallin ennustama matka-aika (ylä- ja alarajat) ja mitatut arvot (pisteet) perjantain ruuhka-aikaan 30.6.2000 Kymijärvi–Heinola-yhteydellä. Neuromalli ennusti matka-aikoja (ylä- ja alarajat) ja mittausarvoja (pisteitä) perjantain ruuhka-aikaan 3.8.2001 Kymijärvi–Heinola-yhteydellä.
7 SUMEAT MALLIT
Sumean ennustemallin rakentaminen
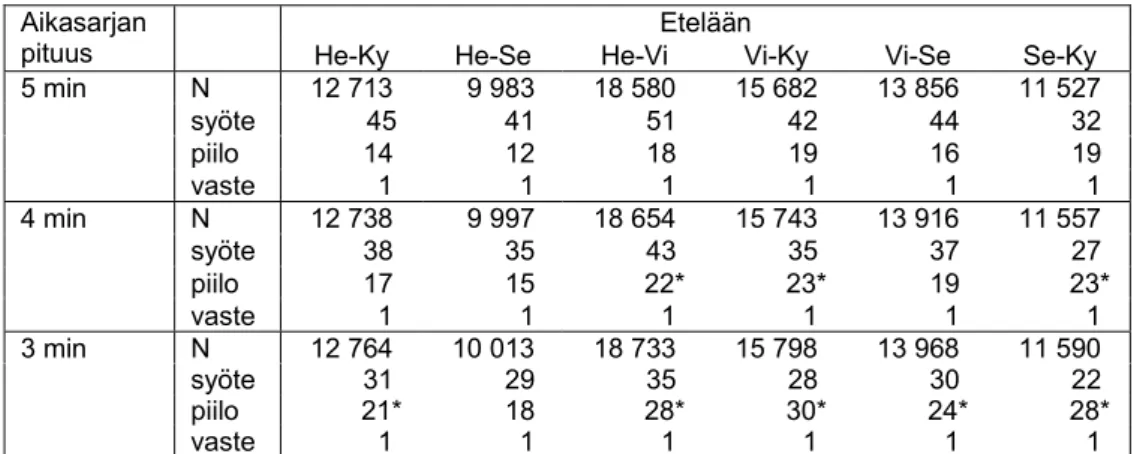
Esimerkiksi B on havaintojen lukumäärä, joille annettu syötemuuttuja kuuluu luokkaan A, mutta joiden lähtömuuttuja ei kuulu luokkaan S, ja n = a + b + c + d. GUHA-analyysin tuloksena saadaan todennäköisyys P(S|A), eli tässä tapauksessa vastaus kysymykseen: "Jos muuttujan x arvo (esim. liikennemäärä) kuuluu luokkaan A, niin jolla Todennäköisyys on, että seuraavan viiden minuutin aikana lähtevien ajoneuvojen matka-aika kuuluu luokkaan S? Tulokset yhdistävät yhden tai enintään kaksi syöttömuuttujaa yhdeksi tulosmuuttujaksi. todennäköisyydet määriteltiin arvoksi 0,90, mikä tarkoittaa, että päädyimme vain "alle 20 minuuttia" -luokkaan.
Kolmannen ajon yhteydessä tiedoista poistettiin havainnot, joissa ennuste kuului kategoriaan "alle 20 min", mikä pienensi matriisin rivien lukumäärän noin 300:aan.

Sumea ennustemalli ja sen hyvyys
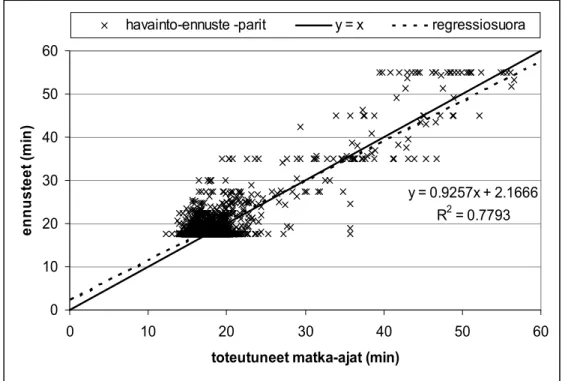
Kuvassa 26 ja taulukossa 38 on esitetty kesällä 2000 käytössä olleen osaliittymien matka-aikojen kymmenen minuutin keskiarvojen summaan perustuvan arvion matka-aikatiedot (ns. nykyinen järjestelmä). ), ja tarkkuus heidän. Kuva 26 osoittaa, että nykyisen järjestelmän estimaatit vastaavat suoraa y = x huonommin kuin sumeat ennusteet, ja korrelaatiokerroin on pienempi kuin sumeiden ennusteiden kanssa. Samankaltainen malli näyttää ennustavan paremmin "alle 20 min" -kategorian kuin Gödel-malli, joka puolestaan ennustaa paremmin "20-25 min" ja "25-" -kategoriat.
Taulukosta voidaan nähdä, että kaikki sumean mallin tuloksille lasketut virheet ovat suurempia kuin vastaavat neuromallin virheet. Sumean mallin ja neuromallin hyvyys määritettynä keskineliövirheen (MSE), virheen (ME), virheen absoluuttisen arvon (MAE), suhteellisen virheen (MRE) ja suhteellisen virheen absoluuttisen arvon (MARE) perusteella. Kun verrataan sumeita malleja toisiinsa, voidaan nähdä, että Gödel-algebramalli on myös hieman parempi kuin vastaava matka-aikatiedon suhteen.
8 RUUHKAPÄIVÄMALLIT
Heinola–Kymijärvi- ja Kymijärvi–Heinola-yhteyksille tehtiin ruuhkamallit rakentamalla koulutussarja yksinomaan niiden päivien materiaaleista, jolloin vuorokauden matka-aika oli jossain vaiheessa selvästi ylittänyt 20 minuuttia. Mutta jos matka-aika oli jo pidentynyt aiemmin 9.00, huomiot olivat ruuhka-ajan alusta. Tässä ruuhka-aika on tarkoitettu havaintoihin, joissa mitattu matka-aika oli suurempi kuin muuttujamerkillä esitetyn matka-ajan ylärajaa vastaavaa ajonopeutta vastaava matka-aika.
Osa ajasta, jolloin Heinola-Kymijärvi ja Kymijärvi-Heinola -yhteyksien ruuhkamallit olisivat ennustaneet matkahuipun oikeaksi, liian lyhyeksi tai liian pitkäksi. Ruuhkamallin ennustama matka-aika (ylä- ja alaraja) ja mitatut arvot (pisteet) juhannuksen paluuhuippussa 25.6.2000 Heinola-Kymijärvi -yhteydellä. Ruuhkamallilla ennustettu matka-aika (ylä- ja alaraja) ja mitatut arvot (pisteet) perjantain ruuhka-aikana 30.6.2000 Kymijärvi – Heinola -yhteydellä.
Ruuhkamallilla ennustettu matka-aika (ylä- ja alaraja) ja mitatut arvot (pisteet) ruuhka-aikana sunnuntaina 15.7.2001 Heinola-Kymijärvi -linkillä. Ruuhkamallilla ennustettu matka-aika (ylä- ja alaraja) ja mitatut arvot (pisteet) ruuhka-aikana perjantaina 3.8.2001 Kymijärvi-Heinola-yhteydellä.

9 MITTAUSJÄRJESTELMÄN RAKENNE
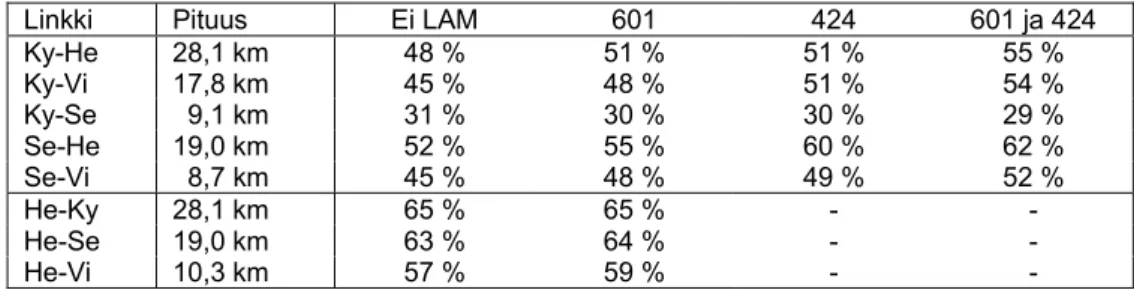
Lisäkamera linkissä näytti parantavan tuloksia enemmän kuin off-link-mittauspiste (taulukko 46). Lisäksi osoitettiin, että lisäkamera lähempänä linkin aloituspistettä kuin päätepistettä tuotti parempia tuloksia kuin lisäkamera lähempänä päätepistettä kuin linkin aloituspistettä. Yksittäisten pisteiden liikennetiedot paransivat kuitenkin mallien suorituskykyä lukuun ottamatta Kymijärvi–Seesta-yhteyden malleja, joita LAM-pisteiden tiedot heikensivät hieman (taulukko 47).
LAM-aseman liikennetiedot ennen Lahdea paransivat tulosta enemmän kuin Vierumäen LAM-aseman tiedot. Kymijärvi–Seesta-linkkiä lukuun ottamatta kahden LAM-aseman tiedot johtivat parempiin tuloksiin kuin yhden LAM-aseman tiedot. Oikein ennustettujen ruuhkamatkojen osuudet eri linkkimalleille perustuen kahteen kamerapisteeseen ja nollasta kahteen LAM-pisteeseen.
10 JOHTOPÄÄTÖKSIÄ JA SUOSITUKSIA
Neuroverkkomallit
Sumeat ennustemallit
Suosituksia
Sumean mallin rakentamisessa käytetty materiaali sisälsi vähän ruuhkatilanteita, mikä vaikeutti pitkien matka-aikojen ennustamista, koska sääntöjen ja jäsenfunktioiden muodostaminen niille oli vaikeaa pienen otoskoon vuoksi. Toistaiseksi ei ole testattu, millaisia tuloksia saataisiin, jos toisena ajankohtana kerätty data syötettäisiin malliin käsittelyä varten. Jotta mallia voitaisiin käytännössä käyttää matka-ajan ennustamiseen valtatiellä 4 Lahden ja Hei-Nolan välillä, sitä on parannettava merkittävästi.
Vierumäki ei ole erityinen ongelmapiste kumpaankaan suuntaan, joten se kuvaa Kymijärven ja Heinolan välisiä ongelmia varsin huonosti. Tällainen mittausjärjestelmä mahdollistaisi myös satunnaisten häiriöiden aiheuttaman matka-aikojen pidentymisen havaitsemisen nopeammin (eli tässä tapauksessa jostain muusta kuin liiallisesta kysynnästä). Toinen tärkeä asia, jossa liikennemäärätiedoista voi olla apua, on määrittää, ovatko mitatut matka-ajat kohtuullisia.
Liikennemäärien puuttuessa on vaikea sanoa, voivatko pitkät matka-ajat johtua liiallisesta kysynnästä, satunnaisesta häiriöstä tai kellojen kalibroinnin epäonnistumisesta. Hyvä nyrkkisääntö voisi olla esimerkiksi se, että kameran maksimivälinä voidaan pitää kahden merkittävän yhteyden välistä etäisyyttä.
11 YHTEENVETO
Mallien tekemien ennusteiden laatua mitattiin myös matka-aikatiedolla eli kuinka moni ennuste olisi oikea ja kuinka moni poikkeaisi varmuusvälin ylä- tai alapuolelle. Oikein ennustettujen matka-aikojen osuus vaihteli suuresti linkeistä toiseen. Parhaiten menestyivät Heinola-Kymijärvi-yhteyden matkahuipun aikaennusteet (oikein ennustettu 78,8 prosenttia ajasta) ja Kymijärvi-Seesta huonoin yhteys (oikein ennustettu 39,3 prosenttia ajasta). Estimointimalleilla arvioitiin tietyn linkin matka-aikaa muiden mittaustietojen perusteella tilanteessa, jossa kyseisen linkin matka-ajan mittaaminen ei ole mahdollista.
Mallit siis arvioivat tietyn yhteyden matka-aikaa saman ja aikaisemman ajanjakson muiden liikennetietojen perusteella. Heinola–Kymijärvi- ja Kymijärvi–Heinola-linkeille rakennettiin hermoverkkoihin perustuvia ruuhkamalleja rakentamalla koulutussarja vain niiden päivien materiaaleista, jolloin vuorokauden matka-aika ylitti jossain vaiheessa selvästi 20 minuuttia. Linkin lisäkamera näytti parantavan tuloksia enemmän kuin paikan päällä oleva mittauspiste, ja lisäkamera lähempänä aloituspistettä kuin linkin loppupistettä johti parempiin tuloksiin kuin lisäkamera lähempänä päätepistettä kuin aloituspiste.yhteyspiste.
Lahden edessä sijaitsevan LAM-aseman liikennetiedot näyttävät parantaneen tulosta pohjoiseen suuntautuvassa liikenteessä enemmän kuin Vierumäen LAM-aseman tiedot. Ihanteellisessa tilanteessa syötteenä olisi matka-aikatietojen lisäksi liikennemäärätiedot kaikesta (ainakin merkittävästä) saapuvasta ja lähtevästä liikenteestä sekä ainakin mahdollisten ongelma-alueiden liikennevirrasta.
LÄHDELUETTELO
Measuring trajectory-related traffic data using correlation methods - a new approach to traffic monitoring and control.
LIITTEET
KORRELAATIOT ENNUSTETTAVAN MATKA-AJAN KANSSA
ke-to ke-to ke-pe pe-to pe-la la-to Viimeiset viisi minuuttia. ti-to to-pe to-su su-he su-pe pe-to Viimeiset viisi minuuttia.
MITATUT JA NEUROMALLEILLA ENNUSTETUT MATKA- AJAT
Itään
SUMEIDEN ENNUSTEMALLIEN JÄSENNYYSFUNKTIOT JA SUMEAT PÄÄTTELYSÄÄNNÖT