Science Arts & Métiers (SAM)
is an open access repository that collects the work of Arts et Métiers Institute of Technology researchers and makes it freely available over the web where possible.
This is an author-deposited version published in: https://sam.ensam.eu Handle ID: .http://hdl.handle.net/10985/11438
To cite this version :
Marco MONTEMURRO, Anita CATAPANO - On the effective integration of manufacturability constraints within the multi-scale methodology for designing variable angle-tow laminates - Composite Structures - Vol. 161, p.145-159 - 2017
Any correspondence concerning this service should be sent to the repository
within the multi-sale methodology for designing variable
angle-tow laminates
Maro Montemurro
∗
Arts etMétiers ParisTeh,I2M CNRSUMR 5295,F-33400 Talene, Frane.
Anita Catapano
Bordeaux INP,UniversitédeBordeaux,I2MCNRS UMR 5295,F-33400 Talene, Frane
Author for Correspondene:
MaroMontemurro, PhD,
Arts etMétiersParisTeh,
I2M CNRSUMR5295,
F-33400Talene,Frane,
tel: +3355 68 45422,
fax: +3354 0006 964,
e.mail: maro.montemurroensam.eu,
maro.montemurrou-bordeaux1.fr
∗
Correspondingauthor.
In this work a multi-sale two-level(MS2L) optimisation strategy for optimising
VATompositesispresented. IntheframeworkoftheMS2Lmethodology,thedesign
problemissplitandsolvedintotwosteps. Attherststepthegoalistodeterminethe
optimumdistributionof the laminatestiness properties overthe struture (maro-
sopisale),whiletheseondstepaimsatretrievingtheoptimumbres-pathineah
layermeetingalltherequirementsprovidedbytheproblemathand(mesosopisale).
TheMS2Lstrategyhasbeenimprovedinordertointegratealltypesofrequirements
(mehanial, manufaturability, geometri,et.) within the rst-levelproblem. The
proposed approah relies on: a) the polar formalism fordesribing thebehaviour of
theVATlaminate,b)theiso-geometrisurfaesfordesribingthespatialvariationof
boththelaminatestiness properties(maro-sale)andthelayersbres-path(meso-
sale)and) anhybridoptimisationtool(geneti andgradient-basedalgorithms)to
performthesolutionsearh. TheeetivenessoftheMS2Lstrategyisproventhrough
anumerialexampleonthemaximisation oftherstbuklingfator ofaVATplate
subjettobothmehanialandmanufaturabilityonstraints.
Keywords:
VAT Laminates; Optimisation; Bukling; Geneti Algorithms; B-splines; Composite Ma-
terials.
1 Introdution
Anisotropi materials, suh as bres-reinfored omposite materials, are extensively used
inmanyindustrialeldsthankstotheir mehanial performanes: highstiness-to-weight
and strength-to-weight ratiosthat lead to a substantial weight saving when ompared to
metalli alloys. In addition, the reent development of new manufaturing tehniques of
omposite strutures, e.g. automated bre plaement (AFP) mahines, allows for going
beyond the lassial design rules, thus leading the designer to nd innovative and more
eient solutions than the lassial straight bre ongurations. The use of the AFP
tehnology brought to the emergene of a new lass of omposite materials: the variable
angle tow (VAT) omposites, [1, 2℄. A modern AFP mahine allows the bre (i.e. the
tow) to be plaed along a urvilinear path within the onstitutive lamina thus implying
a point-wise variation of the material properties (stiness, strength, et.). Of ourse,
this tehnology enables the designer to take advantage of the diretional properties of
ompositesinthemosteetiveway. Theinterestofusingvariablestiness(VS)laminates
is onsiderably inreased during the last years: in the meantime some works on the a
posteriori haraterisation of the elasti response of suh materials have gained a lot of
attention from the sienti ommunity of omposites materials, [3, 4℄. Although the
utilisation of VAT laminates onsiderably inreases the omplexity of the design proess
(mainlydue to the large numberof design variables involved withinthe problem), on the
otherhanditleadsthedesignertooneivenon-onventionalsolutions haraterisedeither
by a onsiderable weight saving or enhaned mehanial properties when ompared to
that an be ahieved interms of mehanial performanes (stiness, bukling behaviour,
et.) byusingaVSplateinwhiheahplyisharaterisedbyaurvilinearpathofthetow
(i.e. a VATonguration)insteadof theonventional straightbreformat ispresentedin
[2℄. Theauthors make use of a sensitivityanalysis and a gradient-based searh tehnique
to determine theoptimal breorientation ina given number ofregions oftheplate. This
work proved that a onsiderable inrement of the bukling load of the struture an be
obtained whenemploying a VATsolutionfor thelayeredplate.
The omplexity of the design proess of a VAT laminated struture is mainly due to
twointrinsi properties ofVATomposites,i.e. theheterogeneity andtheanisotropythat
intervene at dierent sales of the problem and that vary point-wise over the struture.
Moreover,afurtherdiultyisduetothefatthatsuhaproblemisintrinsiallyamulti-
sale design problem: in the most general ase, the designer should take into aount,
withinthe samedesign proess, thefullset ofdesign variables (geometrial and material)
governing the behaviour of the struture at eah harateristi sale (miro-meso-maro).
Up to now no general rules and methods exist for theoptimum design ofVATlaminates.
Onlyfew workson this topi an befound inliterature, andall of them always make use
ofsome simplifyinghypothesesandrules to getasolution. An exhaustive reviewfousing
on onstant and variable stiness design of omposite laminates is presented in [9, 10℄.
In [11℄ the rst natural frequeny of VS omposite panels is maximised by onsidering
on the one hand the lamination parameters and the lassial laminate theory (CLT) for
the desription of the loal stiness properties of the struture and, on the other hand,
a generalised reiproal approximation algorithm for the resolution of the optimisation
problem. This approah is limited to the determination of the stiness properties of an
equivalent homogeneous plate, sine the lay-up design phase is not at all onsidered. In
[12℄theleast-weight design problemof VAT laminatessubmitted to onstraints inluding
thestrengthandthe radius ofurvatureisonsidered. Thedesign variablesarethelayers
thikness and bres angles whih are represented by bi-ubi Bezier surfaes and ubi
Bezier urves, respetively. A sequential quadrati programming method is used to solve
theoptimisation problem.
A two-level strategy wasemployed in[13℄to design a VATlaminated plate: this work
represents the rst attempt of applying a multi-sale numerial strategy whih aims at
determining, at the rst level, theoptimum distribution of the stiness properties of the
struture(intermsofthelaminationparametersofthelaminate),whileattheseondlevel
theoptimumpath (ineahonstitutive layer)mathingloallythelaminationparameters
resultingfromtherststep. However,themajordrawbakofthisworkatuallywasinthe
determination of the urvilinear bres-path of eah layer: the resulting path was dison-
tinuousbeause theauthors had not foreseenanumerial strategy able to simultaneously
on the other hand the optimum distribution of lamination parameters provided by the
rststep ofthe proedure. In[14℄the two-levelapproahwas abandoned andtheauthors
stated the problem bydiretly onsidering thebres path ineah ply asdesign variables.
However, as in[11℄, this approah always leads to a disontinuous bres-pathand, unlike
thestrategy proposedin [11℄, itleads alsoto the emergene of a new issue: theresulting
optimisationproblemwashighlynon-onvexsineitwasformulateddiretlyinthespaeof
thelayersorientations (whihvaryloallyovertheplate). Aordingly,in[14℄theauthors
onlude that suh an issue an be potentially remedied by formulating in a proper way
the design problem of VAT laminates in the framework of the two-level strategy and by
trying to overome the issueof the ontinuity of the bres-path diretlyin the rst level
ofthestrategy wherethe designvariablesarethelaminate mehanial properties(e.g. the
laminationparameters asinthetheoretial framework of[13℄).
Another issueoftenaddressedbyresearhesonVATlaminatesonerns thetowplae-
ment tehnology whih ould introdue several dierenes (i.e. imperfetions) between
thenumerial model of the VAT omposite and thereal struture tailored withthe AFP
proess, if the design methodology does not take into aount the manufaturability re-
quirements. Tothispurposein[15℄anissuelinkedtotheAFPtehnology isaddressed: the
overlap oftow-plaed ourses thatinreases theply thikness (the build-up phenomenon)
thus aeting the strutural response and the surfae quality of thelaminate. The work
of Blom et al. [15℄ presents a method for designing omposite plies with varying bres
angles. The bre angle distribution per ply is given while, using a streamline analogy,
theoptimal distributions of bres oursesisdetermined for minimisingthemaximumply
thikness or maximising thesurfae smoothness. An improved researh on this topi has
been developed in[16℄where analgorithmispresentedto optimisethebrespathinorder
toensuremanufaturability. Afurtherworkfousingonthedevelopment and/orimprove-
ment of manufaturing tehniques for tailoring VAT laminates in order to minimise the
imperfetions indued bythefabriation proess is presented in[17℄. Theontinuous tow
shearing(CTS)tehnique,utilisingthe abilitytosheardrytows,isproposedasanalterna-
tivetehniqueto the well-known AFPproess. Later, theworkpresentedin[17℄hasbeen
improvedthrough theintrodutionofa omputer-aidedmodellingtool[18℄whih anre-
ateaurate niteelement models reetingthe bretrajetories and thiknessvariations
ofVATomposites manufatured usingthe CTS tehnique.
Tooveromethepreviousrestritions,reentlytheauthorspresentedin[19℄arstwork
foused on the generalisation and extension of the multi-sale bi-level (MS2L) proedure
for the optimum design of omposite strutures (initially introdued in [20, 21℄) to the
ase of VAT omposites. Suh a MS2L proedure has already been employed by the
authors andtheir o-workersinthepast for thedesignand optimisation of severallasses
isharaterisedontheonehandbytherefusalofsimplifyinghypothesesandlassialrules
usually employed in the framework of the design proess of laminates, and on the other
handbyaproperandompletemathematialformalisationoftheoptimumdesignproblem
ateahharateristisale(meso-maro). TheMS2Lstrategyreliesontheuseofthepolar
formalism(initially introdued byVerhery [28℄, and later extendedto theaseof higher-
ordertheoriesbyMontemurro[29,30,31℄)for thedesriptionoftheanisotropibehaviour
of theomposite. The real advantage inusing the Verhery's polarmethod is inthe fat
thattheelasti responseofthestrutureatthemaro-saleisdesribed intermsoftensor
invariants,theso-alledpolarparameters havingapreisephysialmeaning(whihislinked
totheelastisymmetriesofthematerial)[32℄. OntheotherhandtheMS2Lstrategyrelies
ontheuseofa partiulargenetialgorithm (GA)ableto dealwitha speiallassofhuge-
size optimisation problems (from hundreds to thousands of design variables) dened over
a domain of variabledimension, i.e. optimisation problems involving a variable number
ofdesign variables [25℄.
As far as onerns the problem of designing VAT omposites in [19℄several modia-
tionshavebeenintrodued inthetheoretialandnumerialframeworkoftheMS2Ldesign
proedure at both rst and seond levels. At the rst level (laminate marosopi sale)
of the proedure, where the VAT laminate is modelled as an equivalent homogeneous
anisotropi plate whose mehanial behaviour is desribed in terms of polar parameters
(whih vary loally over the struture) the major modiations onerned: 1) the utilisa-
tion of higher-order theories (First-order Shear Deformation Theory (FSDT) framework
[29,30℄)fortakingintoaounttheinueneofthetransverseshearstinessontheoverall
mehanial responseof VAT omposites;2) the utilisation ofB-spline surfaesfor obtain-
ing a ontinuous point-wise variation of the laminate polar parameters. Regarding the
seond-level problem (laminate mesosopi sale, i.e. the ply level) the main modia-
tions were: 1) the utilisation of B-spline surfaes for obtaining a ontinuous point-wise
variationofthe bres-pathwithineah ply;2) apropermathematial formalisationofthe
manufaturability onstraints linked to the AFPproess intheframework of theB-spline
representation. Allofthesemodiationsimplyseveraladvantagesfortheresolution ofthe
related optimisation problems (both at rst and seond level of the strategy) as detailed
in[19℄. However, the major drawbak of the approah proposedin [19℄is inthefat that
themanufaturabilityonstraintshave been introdued onlywithin theseond stepofthe
design proedure. Atually, when using suh an approah, there is no warranty that the
optimisation algorithm ould nd an optimum bres path able to meet on the one hand
the optimum distribution of the laminate polar parameters resulting from the rst step
and onthe other handthemanufaturabilityonstraintsimposedduringthe seondstep.
To overome suh an issue, in the present work the theoretial formulation of the
have been improved: in partiular the manufaturability onstraints are now integrated
withinthe rst-level problem(thestrutural optimisation)whiletheseond-level problem
(the lay-up design) is now formulated as an unonstrained minimisation problem as all
therequirements (geometrial, tehnologial, mehanial, et.) are satisedsine therst
stepof the MS2Lstrategy. The paperisorganised asfollows: thedesign problemand the
MS2Lstrategy aredisussed inSetion 2. Themathematial formulation oftherst-level
problem is detailed in Setion 3, while the mathematial statement of the seond-level
problem(the lay-up design) ispresented inSetion 4. A onise desriptionof theFinite
Element(FE)modeloftheVATlaminatedplateisgiveninSetion5,whilethenumerial
results of the optimisation proedure areshownin Setion 6. Finally, Setion 7 ends the
paperwithsome onluding remarks.
2 A new design paradigm for VAT laminates
2.1 Desription of the problem
The optimisation strategy presented in this study is applied to a VAT laminated plate
omposedofaxednumberofplies,henethetotalthiknessoftheplateisxeda priori.
The bres-tow ismade of arbon-epoxy pre-pregstrips whose elasti properties are listed
inTable 1.
ConerningthemehanialbehaviouroftheVATplate,furtherdetailshavetobeadded
inorderto learly dene the theoretial framework ofthis work:
•
thegeometryofthelaminatedstrutureandtheappliedBoundaryConditions(BCs)areknownand xed;
•
theVATplate isomposedofidentialplies(i.e. same materialand thikness);•
thematerialbehaviouris linearelasti;•
theVATplateisquasi-homogeneousandfullyorthotropi [22,23,27,19℄point-wise,i.e. theseproperties apply loallyineah point of thestruture;
•
at the maro-sale (i.e. the sale of the struture) the elasti response of the VATplateisdesribedinthetheoretialframeworkoftheFSDTandthestinessmatries
of the plate are expressedin terms of the laminate polar parameters [29, 30℄whih
onstitute alsothedesign variables oftheVATplateat themarosopi sale.
Asfar asonerns the mesosopi sale of the VATlaminate (i.e. that oftheonstitutive
ply) nosimplifying hypotheses aremadeon therestof thedesign parameters ofthelami-
natedplate,i.e. thedesignvariablesofthestak,namelythelayerpositionandorientation
angle(whih variespoint-wisefor eahlayer).
The main goal of the design strategy is the maximisation of the rst bukling load of a
VATplate subjet to
•
feasibility onstraints onthemehanial parameters (i.e. thelaminate polar param-eters)governing the behaviourof thestrutureat themarosopi sale;
•
manufaturability onstraints on the loalradius of thetow (i.e. theloal steering)due totheonsidered AFPtehnology.
The optimisation proedure is artiulated into thefollowing two distint (butlinked) op-
timisation problems.
1. First-level problem. The aim of this phase is the determination of the optimum
distribution of the mehanial design variables of the VAT struture in order to
minimise theonsidered objetive funtion and to meet, simultaneously, thefull set
ofoptimisation onstraints provided bythe problem at hand. At thislevelthe VAT
omposite plate is modelled as an equivalent homogeneous anisotropi ontinuum
whose behaviour is desribed in terms of laminate polar parameters, whih vary
point-wise over the struture and onstitute the design variables of the rst-level
problem. Moreover, thanks to a proper formulation of the optimisation problem
(detailed inSetion 3), at this stage the designer an add further requirements, e.g.
manufaturability onstraints, strength and damage riteria, et. by ating diretly
onthe resulting distribution of thelaminatepolar parameters.
2. Seond-level problem. The purpose of this design phase is the determination of
the optimum lay-up of the laminate omposing the struture meeting the optimum
distribution of the polar parameters provided by the rst level of the strategy. At
thisstage,thedesignvariablesarethelayerorientationangles whih varypoint-wise
ineahply (namely thebres-path).
It is noteworthy that the integration of the manufaturability onstraints within the
rst-level problem impliessome important onsequenes on theformulation as well ason
theresolution tehnique of the seond-levelproblem thatwill be detailedinSetion 4.
3 Mathematial formulation of the rst-level problem
Asdisussed in [19℄, in orderto apply theMS2L numerial optimisation strategy [23,27℄
totheaseofVATompositessomemajor modiationshavebeen introdued. Regarding
therst-levelproblem thesemodiationsfouson:
•
theutilisationofhigher-ordertheories(inthisasetheFSDT)fortakingintoaountthe inuene of the transverse shear stiness on the overall mehanial response of
theVATlaminate;
•
theutilisation ofB-spline surfaesfor expressingthevariationof thelaminate polarparameters overthe struture.
The rst point represents a very important step forward in the MS2L strategy when
applied to every kind of omposite struture (lassial or VAT) as it allows to properly
design thinaswell asmoderately thik plates.
The seond modiation leads to important onsequenes, too. Suh onsequenes
onstitute justasmanyadvantages forthe resolution oftherelatedoptimisation problem.
Firstly, the utilisation of iso-geometri surfaes leads to a onsiderable redution in the
numberof mehanial design variables (atthemaro-sale), i.e. thepolarparameters de-
nedineahpointoftheontrolnet oftheB-splinesurfae. Seondly,thankstothestrong
onvex hull property of theB-splineblending funtionstheoptimisation onstraints ofthe
problem, related to the speiations of the onsidered appliation, an be imposed only
ontheontrol pointsofthenet: iftheyaresatised onsuhpointsthey areautomatially
metoverthe wholedomain.
However, in the present work, in order to integrate themanufaturability onstraints
within the mathematial formulationof the rst-level problemfurther modiations have
been introdued:
•
onlythevariationofonepolarparameter(namelythepolarangle,asdisussedinthenext subsetion)is desribed interms of iso-geometri surfae over the plate,while
theothers arekeptonstant;
•
thanks to the previous assumption, the tehnologial onstraint on the minimumadmissible radius of urvature of the tow an be diretly imposed on the B-spline
surfaedesribing the variation ofthe polarangle.
Theselastaspetsareofparamountimportane: duetothefuntionalrelationshipexisting
betweenthepolarangleandthepliesorientationangles[29,30℄,whetherthemanufatura-
bility onstraint is satised bythe optimumdistribution of thepolarangle overtheplate
it will be automatially met also by the B-spline surfaes desribing the variation of the
brespath ineah layerasdisussed inSetion 4.
As previously stated the goal of the rst level of the strategy is the maximisation of
the bukling load of the VAT laminate by simultaneously satisfying the feasibility and
manufaturability onstraints on the distribution of the laminate polar parameters over
theplate. All ofthese aspetsare detailedinthe following subsetion.
In the framework of the FSDT theory [33℄ the onstitutive law of the laminated plate
(expressedwithin the global frameof thelaminate
R = {0; x, y, z}
) anbe statedas:
{N}
{M}
=
[A] [B]
[B] [D]
{ε 0 } {χ 0 }
,
(1){F} = [H] {γ 0 } ,
(2)where
[A]
,[B]
and[D]
arethemembrane, membrane/bending oupling and bendingsti- ness matries of the laminate, while[H]
is the out-of-plane shear stiness matrix.{N}
,{M}
and{F}
arethe vetorsof membrane fores, bending momentsand shear fores perunit length, respetively, whilst
{ε 0 }
,{χ 0 }
and{γ 0 }
are the vetors of in-plane strains,urvatures and out-of-planeshear strains ofthelaminate middle plane,respetively,[33℄.
Inordertoanalysetheelastiresponseofthemultilayerplatethebestpratieonsists
inintroduing the laminate homogenisedstiness matriesdened as:
[A ∗ ] = 1
h [A] ,
[B ∗ ] = 2
h 2 [B] ,
[D ∗ ] = 12
h 3 [D] ,
[H ∗ ] =
1
h [H] (basic) , 12
5h [H] (modified) .
(3)
where
h
isthe total thikness ofthelaminated plate.Asdisussedin[29,30℄,intheframeworkofthepolarformalismitispossibletoexpress
theCartesian omponents of these matries interms of their elasti invariants: it an be
proven that, also in the FSDT theoretial framework, in the ase of a fully orthotropi,
quasi-homogeneous laminate the overall number of independent mehanial design vari-
ables desribing its mehanial response redues to only three, i.e. the anisotropi polar
parameters
R A 0K ∗
andR A 1 ∗
andthepolarangleΦ A 1 ∗
(thislastrepresentingtheorientation of themain orthotropy axis) of the homogenised membrane stiness matrix[A ∗ ]
. For moredetails on the polar formalism and its appliation in theontext of the FSDT thereader
isaddressed to[29,30,32℄.
For a VAT omposite, in the most general ase, all of the three independent polar
parameters an vary point-wise over the struture [19℄. However, the aim of this work
is to improve the MS2L proedure in order to integrate the manufaturability onstraint
on the loal steering (i.e. the loal radius of urvature of the tow) sine the rst step
angle
Φ A 1 ∗
an vary over the struture (and suh a variation is expressed by means of aB-splinesurfae)while
R A 0K ∗
andR A 1 ∗
arekeptonstant. Inpartiular,inthemathematial framework of the B-spline surfaes the variation of the laminate polar angleΦ A 1 ∗
an beexpressedas:
Φ A 1 ∗ (ξ, γ) =
n p
X
i=0 m p
X
j=0
N i,p (ξ) N j,q (γ ) Φ A 1 ∗ (i,j) .
(4)Eq. (4)fullydesribesaB-splinesurfaeofdegrees
p
andq
alongtheparametrioordinatesξ
andγ
,respetively,asdepited inFig.1.The dimensionless oordinates
ξ
andγ
an be arbitrarily dened: a natural hoie onsistsoflinking them to the Cartesianoordinatesof thelaminated plate,ξ = x
a , γ = y
b ,
(5)where
a
andb
are the lengths of the plate edges alongx
andy
axes, respetively. In Eq.(4)Φ A 1 ∗ (i,j)
(i = 0, · · · , n p
,j = 0, · · · , m p
) is the value of the laminate polar angle atthegeneriontrolpoint (thesetof
(n p + 1) × (m p + 1)
ontrol pointsforms theso-alledontrol network),while
N i,p (ξ)
andN j,q (γ)
arethep th
-degreeandq th
-degreeB-splinebasisfuntions(along
ξ
andγ
diretions,respetively)denedonthenon-periodi,non-uniform knotvetors:Ξ =
0, · · · , 0
| {z }
p+1
, Ξ p+1 , · · · , Ξ r − p −1 , 1, · · · , 1
| {z }
p+1
,
Γ =
0, · · · , 0
| {z }
q+1
, Γ q+1 , · · · , Γ s − q −1 , 1, · · · , 1
| {z }
q+1
.
(6)
It is noteworthy that the dimensions of the knot-vetors
Ξ
andΓ
arer + 1
ands + 1
,respetively,with:
r = n p + p + 1 ,
s = m p + q + 1 .
(7)For a deeper insightin thematter thereader isaddressedto [34℄.
Thisnewformulationofthemehanialdesignvariablesoftherst-levelproblemallows
thedesignertoimposethemanufaturabilityonstraintsdiretlyonthespatialdistribution
of the polar angle
Φ A 1 ∗
: if this requirement is met at this stage of the strategy it will be automatiallymetbytheoptimumlay-upresulting fromtheseond-levelproblemwithoutimposing further onstraints, as detailed in Setion 4. Furthermore, this formulation is
haraterisedby thefollowing advantages:
•
theuseofaniso-geometrisurfaefor desribingthevariationofΦ A 1 ∗
overthestru-tureimpliesthatthethree independent polarparameters have nodisontinuityover
the plate(
R A 0K ∗
andR A 1 ∗
beingonstant);•
thanksto theB-spline representation thelaminate polar angle must be determinedsolely on eah point of the ontrol net, implying in this way a signiant redution
inthe numberofdesign variables involved withintherst-level problem.
Therefore,the optimisation variables oftheprobleman begrouped into thevetor:
x = n
Φ A 1 ∗ (0,0) , · · · , Φ A 1 ∗ (n p ,m p ) , R A 0K ∗ , R A 1 ∗ o
.
(8)Thetotal numberof design variables is heneequal to
2 + (n p + 1) × (m p + 1)
.Thanks to the utilisation of the B-splinesurfae for representing the spatial variation
of
Φ A 1 ∗
,the tehnologial onstraint on theminimumadmissibleradius ofurvatureofthe towan be stated inastraightforward way:g 1 ( x ) = r adm − r min ≤ 0 ,
(9)where
r adm
istheminimumadmissible radiusofurvatureofthetowwhose valuedependsupon the AFP proess, while
r min
is the loal least radius of urvature of the B-splinesurfae desribing thevariation of
Φ A 1 ∗
.r min
isdened as:r min = min
(x,y) r(x, y) , r(x, y) = t · ∇Φ A 1 ∗ −1
, x ∈ [0, a] , y ∈ [0, b] .
(10)
InEq. (10)
t
isthe loaltangent vetorof theangular eldΦ 1 A ∗ (x, y)
,while∇Φ A 1 ∗
isthegradient ofthe orthotropy orientation withrespetto oordinates
(x, y)
,namelyt =
cos Φ A 1 ∗ , sin Φ A 1 ∗ ,
∇Φ A 1 ∗ = 1
a
∂Φ A 1 ∗
∂ξ , 1 b
∂Φ A 1 ∗
∂γ
.
(11)
Inaddition,intheformulationoftheoptimisationproblemfortherstlevelofthestrat-
egy,thegeometriandfeasibilityonstraintsonthepolarparameters (whiharisefromthe
ombinationofthelayersorientationsandpositionswithinthestak)mustalsobeonsid-
ered. Theseonstraints ensure thatthe optimumvalues ofthe polar parameters resulting
fromtherststeporrespondtoafeasiblelaminatethatwillbedesignedduringtheseond
stepof the optimisation strategy,see [35℄. Sine thelaminate is quasi-homogeneous, suh
onstraints an be written onlyfor matrix
[A ∗ ]
asfollows:
−R 0 ≤ R A 0K ∗ ≤ R 0 , 0 ≤ R A 1 ∗ ≤ R 1 , 2
R A 1 ∗ R 1
2
− 1 − R A 0K ∗ R 0 ≤ 0 .
(12)
therelevant optimisation variables, i.e. on
R A 0K ∗
andR A 1 ∗
. Hene, the resulting feasibility onstraint on thelaminate polar parameters is:g 2 ( x ) = 2 R A 1 ∗
R 1 2
− 1 − R 0K A ∗
R 0 ≤ 0 .
(13)For a wide disussionupon thelaminate feasibilityand geometrial boundsas well as
ontheimportane ofthequasi-homogeneity assumption thereader is addressedto [35℄.
3.2 Mathematial statement of the problem
Therst-levelproblemfousesonthedenitionoftheoptimaldistributionofthelaminate
polar parameters. Inthis bakground,thesolutionof thestrutural optimisation problem
is searhed for an orthotropi and quasi-homogeneous (point-wise) plate subjet to given
BCs.
Therefore theoptimisation probleman beformulated asfollows:
min
x − λ ( x )
subjetto:
g i ( x ) ≤ 0 , (i = 1, 2)
(14)
where
λ
isthe rst bukling fatorof thelaminated struture.3.3 Numerial strategy
Problem(14) isa non-linear, non-onvex problem interms ofthe mehanial design vari-
ables. Itsnon-linearityandnon-onvexityisduetothenatureoftheobjetivefuntion,the
rst bukling fator,thatis anon-onvexfuntion interms oftheorthotropy orientation.
In addition, the omplexity of suh a problem is also due to the feasibility and manu-
faturability onstraints imposed on the polar parameters of the plate, see Eqs. (9) and
(13). We reall that the overall number of design variables and optimisation onstraints
for problem(14) is
2 + (n p + 1) × (m p + 1)
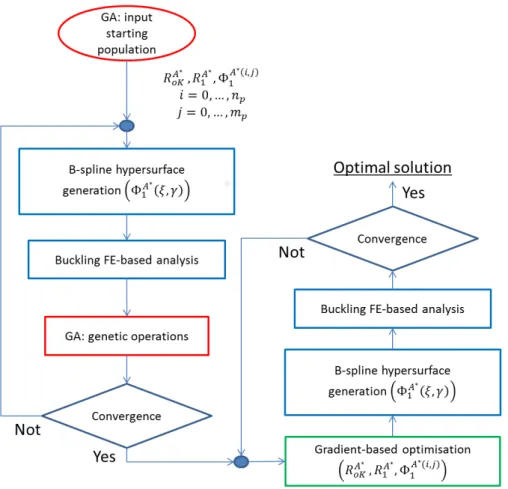
andtwo,respetively.For the resolution of problem (14) a hybrid optimisation tool, omposed of the GA
BIANCA [25℄ interfaed with the MATLAB fminon algorithm [36℄, oupled with a FE
model of the plate (used for numerial alulation of the rst bukling load) has been
developed,seeFig. 2.
TheGABIANCAwasalreadysuessfullyappliedtosolvedierentkindsofreal-world
engineering problems, e.g. [23, 27℄. As shown in Fig. 2, the optimisation proedure for
the rst-level problem is split intwo phases. During the rst phase theGA BIANCA is
interfaed with the FE model of the VAT plate: for eah individual at eah generation,
a FE-based bukling analysis is arried out for the evaluation of the rst bukling load
BIANCAandelaboratedbyanANSYSParametriDesignLanguage(APDL)marowhih
generatestheB-splinesurfaerepresentingthedistributionofthepolarangle
Φ A 1 ∗
overtheVAT plate,inorder to alulate therst bukling loadof thestruture together withthe
minimum radius of urvature of the angular eld. At the end of the FE analysis, the
GAelaborates theresults provided bythe FEmodel (intermsofobjetive and onstraint
funtions)inorder to exeutethe geneti operations. These operations arerepeated until
theGAmeetsthe user-denedonvergene riterion.
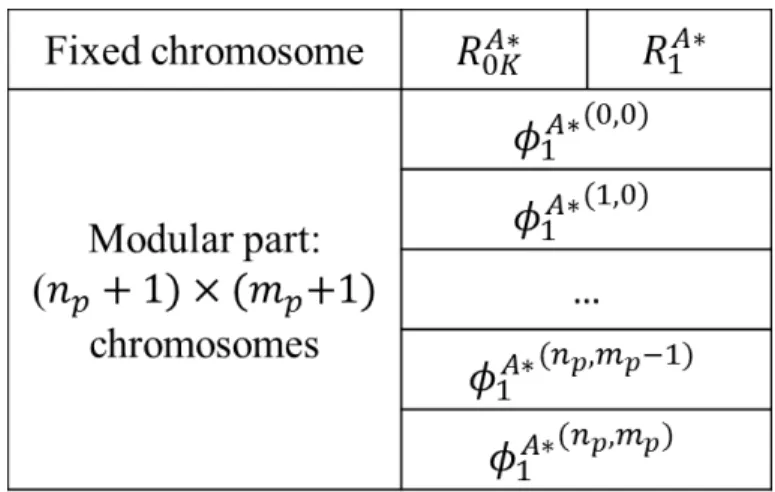
The generi individual of the GA represents a potential solution for the problem at
hand. The genotype of the individual for problem (14) is illustrated in Fig. 3 and it
is haraterised on the one hand by a modular part omposed of
(n p + 1) × (m p + 1)
hromosomeswith only one geneodingthe valueof thepolar angle
Φ A 1 ∗ (i,j)
whileon theother hand by a xed hromosome with only two genes eah one oding the remaining
polar parameters, i.e.
R A 0K ∗
andR A 1 ∗
. Due to the strong non-onvex nature of problem(14), the aim of thegeneti alulationis to provide a potential sub-optimal point inthe
design spae whih onstitutes the initial guess for the subsequent phase, i.e. the loal
optimisation, wherethe fminon gradient-based algorithm isinterfaed withthesame FE
modelof the VATplate.
4 Mathematial formulation of the seond-level problem
The seond-level problem onerns the lay-up design of the VAT laminated plate. The
goal of this problem is the determination of at leastone staking sequene satisfying the
optimumspatialdistributionofthepolarparameters overthestrutureresulting fromthe
rstlevelofthestrategyandhavingtheelastisymmetriesimposedtothelaminatewithin
theformulation ofthe rst-level problem,i.e. quasi-homogeneity andorthotropy.
In the aseof a VATsolution the bres-pathvariespoint-wiseineveryply omposing
thelaminate. Hene a properdesription of thebres-path isneessary to formulate and
solve the seond-level problem of the MS2L strategy. To this purpose, the point-wise
variationof the bres orientation (in eah ply) is desribed through theuse of a B-spline
surfae. As explained in [19℄ the use of B-spline surfaes allows, as in the ase of the
rst-levelproblem, to redue thetotal number ofdesign variables.
Nevertheless, unlike the approah proposed in [19℄, the improved formulation of the
rst-levelproblemalongwiththeintegrationofthemanufaturabilityonstraintsdesribed
inSetion3leadtosomemajormodiations(andsimpliations)alsofortheseond-level
problem. Inpartiular, asin[19℄thebres-pathinthe generiply isrepresented through
aB-spline surfaeas:
δ k (ξ, γ) =
n p
P
i=0 m p
P
j=0
N i,p (ξ) N j,q (γ) δ k (i,j) with k = 1, · · · , n ,
(15)where
δ k (i,j)
istheorientation angle at thegeneri ontrol pointfor the k-thlayer. More-
over,this B-spline surfae isharaterisedbythe sameparameters (withtheexeption of
thevalueoftheorientationineahontrol point)asthoseutilised forthedenitionofthe
B-splinesurfae ofthepolarangle
Φ A 1 ∗ (ξ, γ)
,see Eqs. (4)-(7).As a onsequene of both the new formalisation of the rst-level problem and the
assumptionsmadeon the spatialdistributionof the polar parametersof thelaminate,the
valueofthe bre orientation angleineahontrol point (foreah layer)an bealulated
asfollows:
δ k (i,j) = Φ A 1 ∗ (i,j) + δ k (ξ 0 , γ 0 ) − Φ 1 A ∗ (ξ 0 , γ 0 ) ,
(16)where
δ k (ξ 0 , γ 0 )
andΦ 1 A ∗ (ξ 0 , γ 0 )
arethebresorientation angleforthek-thlayerandthe loalorthotropyorientation ofthe laminate,respetively,alulated atthearbitrarypoint(ξ 0 , γ 0 )
. As itlearly appears from Eq. (16) the only unknowns are the layer orientation anglesδ k (ξ 0 , γ 0 )
. Therefore,inthisbakground(andunliketheapproahproposedin[19℄)thedesignvariablesoftheseond-levelproblemarenotthelayersorientationanglesineah
point of the ontrol net, rather the value of the orientation angle at the arbitrary point
(ξ 0 , γ 0 )
foreah ply,namelyδ k (ξ 0 , γ 0 )
. Thisfatimpliessomeonsequenesofparamountimportane whih onstitutes as many advantages in the formalisation and resolution of
theseond-levelproblem.
Firstly,whenomparedtotheapproahpresentedin[19℄thenumberofdesignvariables
oftheseond-levelproblemisdrastiallyredued andpassesfrom
n × (n p + 1) × (m p + 1)
to only
n
,i.e. the pliesorientation angles dened for thearbitrarypair(ξ 0 , γ 0 )
.Seondly, the seond-level problem an now be formulated as an unonstrained min-
imisation problem(beause the manufaturability onstraintsare integrated into therst
stageoftheMS2Lstrategy)andsolvedsolelyinone(arbitrary)pointoftheVATlaminated
plate:
δ k min (ξ 0 ,γ 0 ) I (δ k (ξ 0 , γ 0 )) k = 1, · · · , n .
(17)InEq. (17)
I(δ k (ξ 0 , γ 0 ))
isthe overall objetive funtionwhih isdened as:I (δ k (ξ 0 , γ 0 )) = X 6
i=1
f i (δ k (ξ 0 , γ 0 )) .
(18)where
f i (δ k (ξ 0 , γ 0 ))
are quadrati funtions in the spae of polar parameters, eah one representing a requirement to be satised. For theproblem at hand the partial objetivef 1 (δ k (ξ 0 , γ 0 )) =
Φ A 0 ∗ (δ k (ξ 0 , γ 0 )) − Φ A 1 ∗ (δ k (ξ 0 , γ 0 ))
π/4 − K A ∗ (opt)
2 ,
f 2 (δ k (ξ 0 , γ 0 )) =
"
R A 0 ∗ (δ k (ξ 0 , γ 0 )) − R 0 A ∗ (opt) R 0
# 2
,
f 3 (δ k (ξ 0 , γ 0 )) =
"
R A 1 ∗ (δ k (ξ 0 , γ 0 )) − R 1 A ∗ (opt) R 1
# 2
,
f 4 (δ k (ξ 0 , γ 0 )) =
"
Φ A 1 ∗ (δ k (ξ 0 , γ 0 )) − Φ A 1 ∗ (opt) (ξ 0 , γ 0 ) π/4
# 2
,
f 5 (δ k (ξ 0 , γ 0 )) =
|| [C] (δ k (ξ 0 , γ 0 ))||
|| [Q] ||
2
, f 6 (δ k (ξ 0 , γ 0 )) =
|| [B ∗ ] (δ k (ξ 0 , γ 0 ))||
|| [Q] ||
2
,
(19)
where
K A ∗ (opt) = (
1 if R A 0K ∗ (opt) < 0 ,
0 otherwise .
(20)In Eq. (19)
f 1 (δ k (ξ 0 , γ 0 ))
represents the elasti requirement on the orthotropy of the laminate having thepresribed shape,f 2 (δ k (ξ 0 , γ 0 ))
,f 3 (δ k (ξ 0 , γ 0 ))
andf 4 (δ k (ξ 0 , γ 0 ))
aretherequirementsrelatedtothepresribedvaluesoftheoptimalpolarparametersresulting
fromtherst-levelproblem, while
f 5 (δ k (ξ 0 , γ 0 ))
andf 6 (δ k (ξ 0 , γ 0 ))
arelinkedtothequasi-homogeneityondition. Formoredetailsonthemeaningofthepartialobjetivefuntions,
on the elasti symmetries of the laminate in the framework of the FSDT and on the
symbols appearing in Eq. (19), the reader is addressed to [29, 30℄.
I (δ k (ξ 0 , γ 0 ))
is apositivesemi-denite onvexfuntioninthespaeoflaminatepolarparameters, sineitis
dened as a sum of onvexfuntions, seeEqs. (18)-(19). Nevertheless, suh a funtion is
highlynon-onvexinthe spaeofpliesorientationsbeausethelaminatepolarparameters
dependuponirular funtionsofthelayersorientationangles,see[29,30℄. Moreover,one
of the advantages of suh a formulation onsists inthe fat that the absolute minima of
I(δ k (ξ 0 , γ 0 ))
areknownapriorisinetheyarethe zeroesofthisfuntion. Formoredetailsaboutthe nature oftheseond-levelproblemsee [25,26,21℄.
Conerning thenumerial strategyfor solvingproblem(17)theGABIANCAhasbeen
employed to nd a solution also for the seond-level problem. In the most general ase,
thegenotype ofthe individualisomposedof
n
hromosomes(onefor eahply), eahoneharaterisedby asinglegene odingthelayerorientation angle.
5 Finite element model of the VAT laminate
Inordertodetermine theurrentvalueoftheobjetivefuntion(therst buklingfator)
and that of the optimisation onstraints of problem (14) a lassial eigenvalue bukling
alulation, dierent ongurations of the VAT plate requires the reation of an ad-ho
input le for the FE model that has to be interfaed with the hybrid (GA + gradient-
basedalgorithms) optimisation tool.
The FEmodelof the VAT laminated plate(see Fig. 4) employed during therst step
of theMS2L strategy,is built within the ANSYS environment andis made ofSHELL281
elementsbased onthe Reissner-Mindlin kinematimodel,having 8nodesand sixDegrees
OfFreedom (DOFs) pernode. The mesh size ishosen afterpreliminary meshsensitivity
analyseson theonvergene of thevalueof the rst bukling load for a given setof BCs.
It was observed that a mesh having 2482 DOFs issuient to properly evaluate therst
buklingloadof thestruture.
It is noteworthy that the B-Spline mathematial formalism hasbeen implemented by
the authors into the ANSYS environment by using the APDL [37℄ for reating a set of
appropriate maros that were integrated within the FEmodel of theVATplate. At this
stage,the plateismodelled asanequivalenthomogeneousanisotropiplatewhose stiness
matries(
[A ∗ ]
,[B ∗ ]
,[D ∗ ]
and[H ∗ ]
)vary point-wise, i.e. for eah element disretisingthe real struture. In partiular, in order to properly dene, for every element of the VATplate,theorretvalueofitsstinesspropertiesthefollowingstrategyhasbeen employed:
1. for a given set of the laminate polar parameters dened in eah ontrol point (i.e.
thedesign variables passed from the optimisation tool to theFE modelof the VAT
plate),build theorrespondingB-splinesurfaes;
2. disretisethe plateinto
N e
elements;3. x the element index
i
: for thei
-th element retrieve the Cartesian oordinates ofits entroid, i.e.
(x i e , y i e )
and alulate the orresponding dimensionless oordinates(ξ e i , γ i e )
aordingto Eq. (5);4. alulatethelaminate polarparameters (andhenetheCartesianomponentsofthe
stiness matries of the laminate) for
(ξ e i , γ e i )
and assign the material properties tothe element
i
;5. repeatpoints
3
and4
for eahelement of theplate.Finally,the linearbukling analysisisperformedusingtheBCsdepited inFig.4and
listedinTable2.
6 Studied ases and results
In this setion a meaningful numerial example is onsidered in order to prove the ee-
tiveness of the MS2L strategy for the optimum design of VAT laminates. Asdepited in
N y /N x = 0.5
. The plate hasa square geometry with side lengtha = b = 254
mm and ismadeof
n = 24
plieswhose materialpropertiesarethose listedinTable1. Conerningtherst-levelproblem, theparameters deningthe B-splinesurfaewhihdesribe thespatial
distribution of the polar angle over the VAT plate are set as:
n p = m p = 4
(hene veontrol points along eah diretion),
p = q = 2
(degrees of the blending funtions alongeahdiretion). Moreover,the B-splineisdened overthefollowing uniform knot-vetors:
Ξ =
0, 0, 0, 1 3 , 2 3 , 1, 1, 1 , Γ =
0, 0, 0, 1 3 , 2 3 , 1, 1, 1 .
(21)
Aordingly,for therst-level problemtheoverallnumberof design variablesand optimi-
sation onstraints is
27
and two, respetively. The mehanial design variables together withtheirnature andboundsfor the rst-levelproblemarelisted inTable3. Inaddition,thereferenevaluefor theminimumadmissible radius ofurvatureof thetow, i.e.
r adm
issetequal to
80
mm.Conerning the seond-level problem, the parameters dening the B-spline surfae
whihdesribesthepoint-wisevariationofthebreorientation angle(foreahply)arethe
same asthoseemployed during therststep ofthe strategy. However, inorderto further
simplify the problem of retrieving an optimum stak, the searh spae for problem (17)
hasbeen restrited to apartiular lass ofquasi-homogeneous laminates: thequasi-trivial
(QT)stakingsequenes whihonstituteexatsolutions withrespetto therequirements
of quasi-homogeneity, i.e. funtions
f 5 (δ k (ξ 0 , γ 0 ))
andf 6 (δ k (ξ 0 , γ 0 ))
in Eq. (19). QTsolutions anbe foundfor laminateswithidential plies(samematerial andthikness)by
ating only on the position of the layers within the stak. Indeed, the potential of QT
staks is in the fat that they onstitute exat solutions (in terms of quasi-homogeneity
ondition) regardless to the value of the orientation angle assigned to eah layer: in this
way the orientations represent free parameters whih an be optimised to full further
elasti requirements. The proedure for searhing QT staks is (oneptually) quite sim-
ple: it sues to x the number of layers
n
and the number of saturated groupsn g
(i.e.the number of possible dierent orientation angles within the stak) and look for all the
permutationsofthepositionofeahgroupmeetingthequasi-homogeneityondition. More
detailsonthistopianbefoundin[38℄. Nevertheless,asdisussedin[38℄,theproblemof
determiningQT staks gives riseto a huge numberofsolutions: thenumberofQT staks
rapidlyinreasesalongwith
n
. TothispurposeadatabaseofQT stakshasbeen builtfordierent ombinations of
n
andn g
.For theproblemathand,andforeahonsideredase, thenumber ofsaturatedgroups
n g
hasbeenxedapriori. Letben sol
thenumberofQTstaksforapartiularombinationof
n
andn g
. Eahsolutionolleted withinthedatabaseis uniquelyidentied byanID sol
(i.e. aninteger) whihvariesintherange
[1, n sol ]
. ThereforetheID sol
representsafurtherdesign variable along with the
n g
orientation angles. As stated previously, the solution searh is performedthrough theGA BIANCA; in thease of QT staks the struture ofthe individual's genotype is simple beause it is omposed of a single hromosome with
n g + 1
genes: the rst one odes the variableID sol
whilst the remaining genes ode theorientation angles assoiated to every group whih are ontinuous variables in the range
[-90
◦
,90
◦
℄.
Regarding the settingof the genetiparameters for theGABIANCAutilised for both
rst and seond-level problems they are listed in Table 4. Moreover, onerning the
onstraint-handling tehnique for the rst-level problem the Automati Dynami Penal-
ization (ADP) method has been employed, see [39℄. For more details on the numerial
tehniquesdevelopedwithinthe newversionofBIANCAand themeaning ofthevalues of
thedierent parameters tuning theGAthe reader isaddressed to [25,21℄.
Asfarasonerns thefminon optimisation toolemployedfor theloalsolutionsearh
attheendofthe rststep, thenumerial algorithmhosento arryout thealulations is
theative-set methodwithnon-linear onstraints. For more detailson thegradient-based
approahes implemented into MATLAB,the reader isaddressedto [36℄.
Before starting the multi-sale optimisation proess a referene struture must be de-
ned inorder to establish a referene value for the rst bukling fator of theplate. The
referenestrutureisstill asquareplate ofside
a = b = 254
mmomposedof24
unidire-tionalbre-reinfored laminae whose material properties are those listed inTable 1. The
stakingsequeneofthereferenesolutionis
[0/−45/0/45/90/45/0/−45/90/45/90/−45] s
.Thehoie ofthereferenesolutionhasbeen orientedtowardsasymmetriquasi-isotropi
stak, of ommon use in real-world engineering appliations, whih onstitutes a good
ompromisebetween weight and stinessrequirements(in termsofbuklingload): suha
ongurationisharaterisedbyabuklingfator
λ ref = 81.525
whenN x = 1
N/mmandN y = 0.5
N/mm.6.1 Case 1: design without manufaturability onstraints
Problem(14)hasbeenrstlysolvedtodesignaVATplatewhihisnotsubjettomanufa-
turabilityonstraints. Inthisasetheonlyoptimisationonstraintisthatonthefeasibility
ofthepolarparameters
R 0K A ∗
andR 1 A ∗
,seeEq. (13). Conerningtherst-levelproblem,theoptimumdistributionofthelaminatepolarangle
Φ 1 A ∗
overtheVATplateisillustrated in Fig. 5, while the optimum value of the polar parametersR 0K A ∗
andR 1 A ∗
as well asthatof
Φ 1 A ∗
for eahontrol point arelisted inTables 5 and6,respetively.Regarding thesolutionofthe seond-levelproblem,thenumber ofsaturatedgroups
n g
is set equal to three. In the ase of a laminate omposed of 24 plies and three saturated
groups the overall number of QT staks is
n sol = 26
. Assigning the salars zero, oneand two to the rst,seond and third saturated group, respetively,the optimal staking
[0 1 0 1 2 0 2 0 2 2 0 0 0 0 1 1 0 1 0 1 2 0 2 0] .
(22)Thismeans thatwithin the optimumstaklayers
•
1,3,6,8,11-14, 17, 19,22and 24 belong to thesaturatedgroup 0, i.e. theysharethesameorientation
δ 0 (ξ, γ)
;•
2,4, 15, 16, 18 and 20 belong to the saturated group 1 haraterised by the loalorientation angle
δ 1 (ξ, γ)
;•
5,7,9,10,21and23 belongtothesaturatedgroup 2 sharing theorientationangleδ 2 (ξ, γ)
.SinetheorientationangleforeverysaturatedgroupisdesribedbymeansofaB-spline
surfae, it sues to list the value of the orientation in eah point of the ontrol net to
uniquelydenetheB-splinesurfae. Tothispurposetheoptimumvaluesoftheorientation
angleineahpointoftheontrolnetforeverysaturatedgrouparereportedinTables8-10,
whilst anillustration ofthe optimumbres-path (foreah group)isdepited in Fig. 6.
It is noteworthy that the optimal solution found at the end of the MS2L design pro-
edureis haraterised bya buklingfator of
145.74
whih isabout78%
higher than therefereneounterpartand,inthemeantime, satisesthefeasibilityonstraintonthepolar
parameters.
6.2 Case 2: design inluding manufaturability onstraints
In this setion the problem of theoptimum design of a VAT laminated plate is solved in
themost general ase,i.e. bytakinginto aount alsothemanufaturabilityonstrainton
theminimum radius of urvature ofthe tow imposed by theAFPfabriation proess, see
Eq. (9). Conerning the rst-level problem, the optimum value of the polar parameters
R 0K A ∗
andR 1 A ∗
as well as that ofΦ 0 A ∗
for eah ontrol point are reported inTables 5and7,respetively,whilst theoptimumdistribution ofthelaminate polarangle
Φ 0 A ∗
overtheVATplate isillustrated inFig. 7.
Asshown inTable 5,for thisseond ase apartiular solution hasbeen obtained: the
optimum value of the polar parameter
R 1 A ∗
is equal to zero in eah point of the VATomposite plate whih means that loally the struture is haraterised by the square
elasti symmetry, see [31℄. In this ase, the main diretion of orthotropy is represented
(point-wise)bythespatial distributionof the polar angle
Φ 0 A ∗
. The relationshipbetween thetwo polar angles,whih representsa tensor invariant too,is:Φ 0 A ∗ − Φ 1 A ∗ = K A ∗ π
4 ,
(23)too. Moreover, inthis ase
K A ∗ = 1
beauseR 0K A ∗ < 0
,seeTable5.As far as onerns the solution of the seond-level problem, a number of saturated
groups
n g = 4
has been hosen. In the ase of a laminate omposedof 24 plies and foursaturatedgroups onlyone QT stakexistshaving theform:
[0 1 2 3 2 3 1 3 0 2 0 1 0 1 3 1 2 0 2 3 2 3 0 1] ,
(24)wherean integerbetween zeroand threehasbeen assignedto eahsaturatedgroup. How-
ever, in performing the solution searh for problem (17), the GA provided an optimum
stakwith onlytwo saturatedgroups having theform:
[0 0 2 2 2 2 0 2 0 2 0 0 0 0 2 0 2 0 2 2 2 2 0 0] ,
(25)whih means that groups
0
and1
are idential aswell as groups2
and3
. The optimumvaluesof the orientation angles ineah point ofthe ontrol net for every saturated group
are reported in Tables 11 and 12, whilst an illustration of the optimum bres-path (for
eahgroup) isdepited inFig. 8.
It is noteworthy that the optimal solution found at the end of the MS2L design pro-
edureis haraterised bya buklingfator of
136.09
whih isabout67%
higher than therefereneounterpartand,inthe meantime, satisesboth thefeasibilityonstraint onthe
polar parameters and the manufaturability onstraint on the minimum (loal) radius of
urvature ofthetow.
6.3 General disussion of results
FromaarefulanalysisoftheoptimumongurationoftheVATlaminatedplateprovided
bytheMS2L proedure, itis possible to deduethefollowing fats.
•
Thepoint-wisevariationof thelaminatepolarangles resulting from therst step ofthestrategy istotallyasymmetri. Symmetrisolutions are,ofourse,possible: itis
suienttoimposethesymmetryonditiondiretlyonthevaluesofthepolarangles
at the points of the ontrol network of the B-spline surfaes. However, in order to
state and solve the optimisation problem inthemost general ase, suh a ondition
hasnot been imposedinthis study.
•
Whenlooking at theoptimum spatialdistribution of thelaminate polar parameters(Tables5-7),oneannotiethatthelaminateanbeharaterisedeitherbyanordi-
naryorthotropy shapewith
K A ∗ = 0
(ase1) aswell asbya squaresymmetrywithR A 1 ∗ = 0
(ase2). Indeed,intherstase(wherethemanufaturabilityonstraint is not onsidered) the spatial distribution ofΦ 1 A ∗
over theplate is haraterisedbyaturewhihstien"thestruturebyinreasingthebuklingfator. Conversely,when
lookingatthesolutionofase2(wheretherequirement ontheloalsteeringistaken
intoaount)thevariation of
Φ 0 A ∗
issmootherthan thatoftheprevious aseinor-derto omplywith the manufaturability onstraint. Moreover the solution of ase
2isloatedontheboundary ofthe elastidomainofthelaminate polarparameters,
seeTable3. Aordingly,when searhing for an optimumstaksolution of problem
(17) the GA found a point-wise QT symmetri ross-ply stak (indeed the angular
dierene between the two saturated groups is equal to
90 ◦
for eah point of theplate,seeTables 11 and12) whose mainaxis oforthotropy(i.e.
Φ 0 A ∗
) variesloallyto maximise the bukling fator and to meet, at the same time, the tehnologial
onstraint.
•
Unlike the vast majority of works reported in literature [40℄, the optimum bres-path for eah ply is very general. In the framework of the proposed approah, the
point-wise variation of the bres-path inevery lamina does not follow simple linear
orparaboli variations (withrespettolaminate globalframe),ratheritisdesribed
by a general B-spline surfae, see Eq. (15). This fat, together with the very gen-
eralformulationofthedesignproblemof VATlaminates, allows thedesignertond
an optimum stak meeting all the requirements (i.e. elasti and manufaturability
onstraints) whihareintegrateddiretlyintherststepofthestrategy (i.e. at the
marosopisale), seeEq. (14),withouttheneed ofafurtherpost-proessingtreat-
ment to simplify the trajetory of the tows in order to omply with theonstraints
imposed bythe AFPproess.
•
Finally,the optimumbres-path (foreahlayer)foundat theend oftheseond stepofthe MS2Lproedure doesnot need of a further stepfor thereonstrution of the
CADmodelbeausethevariationofthebres-pathisdesribedbyaB-splinesurfae
whihisfullyompatible withseveralstandard leformats(IGES,STLandSTEP),
allowing in this way a rapid exhange of information among the CAD tool and the
software ofthe AFPproess.
7 Conlusions
Inthiswork animprovedversionof themulti-sale two-leveldesign/optimisationmethod-
ology of VATompositestrutures (initiallypresented in[19℄)has been introdued. This
designparadigmessentiallyreliesontheutilisationofaMS2Loptimisationproedurehar-
aterised byseveralfeaturesthatmakeitan original,eetiveand generalmethodfor the
multi-saledesign ofVATstrutures. Inthepresentworkthisstrategy hasbeenemployed
to deal with theproblem of the maximisation of thebukling fator of a VAT multilayer
thedesignproess isnot submitted torestritions: anyparameterharaterising theVAT
omposite(at eah sale)isan optimisation variable. Thisallows thedesigner to lookfor
a true global minimum, hard to be obtained otherwise. On theother hand, both the for-
mulationofthedesignproblemandtheMS2Loptimisation strategyhavebeen generalised
and improved inorder to be applied to theproblemof designinga VSomposite.
In the framework of the MS2L design methodology several modiations have been
introdued for both rst and seond level problems. As disussed in [19℄, regarding the
rst-levelproblem the mainmodiations are:
•
theuse of higher-order theories (introdued asresult of [29,30,31℄) for taking intoaount the inuene of the transverse shear stiness on theoverall mehanial re-
sponseofVATomposites;
•
the utilisation of B-spline surfaes for desribing the distribution of the laminatepolarparameters overthestruture whihleadsto aontinuouspoint-wisevariation
ofthe laminate stiness matries.
Theseaspets leadto someimportant advantagesfor theresolution of therelatedoptimi-
sation problem. Inthemost general asetheutilisation ofB-splinesurfaesfor desribing
the point-wise variation of the polar parameters leads to a onsiderable redution in the
number of design variables (the polar parameters have to be dened solely ineah point
of the ontrol network of theB-spline surfae). Inthis bakground, thanks to the strong
onvex-hull property of the B-spline blending funtions, the optimisation onstraints of
the problem (related to the speiations of the onsidered appliation) an be imposed
only on the ontrol points of the network: if they are satised on suh points they are
automatiallymet overthewholedomain.
In this study a new formalisation of the rst-level problem is presented: unlike the
approah proposed in [19℄, only the polar angle
Φ A 1 ∗
varies over the struture (ad itsspatialdistribution isalways desribed through aB-splinesurfae), whilst theanisotropi
moduli
R A 0K ∗
andR A 1 ∗
of the VATlaminate arekeptonstant. This fatgivesrise to someimportant advantages:
•
the feasibility onstraints on the laminate polar parameters an be stated only onetimeforthewholeVATlaminate (andnotineahpointoftheontrol netasin[19℄);
•
the new formulation of the mehanial design variables allows for integrating themanufaturability requirements linked to the AFP proesssine the rst step of the
strategy asoptimisationonstraintsonthespatialdistributionofthepolarangle
Φ A 1 ∗
.The integration of the tehnologial onstraints sine the rst step of the MS2L strategy
togetherwiththe newformalisationof therst-level problemimply someonsequenes of
laminate):
•
thebres-path ofeah layeran be desribed througha B-spline surfaehaving thesameparameters(numberofontrolpoints,degreealongeahdiretion,omponents
ofthe knotvetors)of the B-splinesurfae employed for
Φ A 1 ∗
duringtherststep ofthe proedure; moreover thevalueof the orientation angle ateah ontrolpoint (for
eahlayer) an be gotthrougha straightforward analytial relationship;
•
the seond-level problem an be formulated and solved only in an arbitrary pointof the VAT laminate thus implying a signiant redution of the number of design
variables;
•
themathematial formulation of the seond-level problemis onsiderably simpliedanditanbestated intheformofan unonstrainedminimisationproblem(beause
manufaturability onstraints arealreadyinluded within therst-levelproblem).
Allofthesemodiationsallowtogobeyondthemainrestritionsharaterisingthedesign
ativitiesand researh studieson VATomposites thatan befound inliterature.
Finally,theeetiveness oftheimprovedversionoftheMS2Lstrategyhasbeenproven
throughameaningfulnumerialexample. Theoptimisationtoolallowstondanoptimum
VAT laminate haraterised bya signiant inrement of the rst bukling fator (about
78%
when manufaturability onstraints are not involved and about67%
when they areintegrated within the design problem) when ompared to a referene lassial solution
(omposedofstraight-bresunidiretional plies).
Conerning the perspetives of this work, there are still some theoretial, numerial
and tehnial aspetsthat need to be deeplyinvestigated and developed inorder to make
theproposedapproahaverygeneralandomprehensivestrategyabletoprovidesolutions
that are both eient (true optimal ongurations) and manufaturable. Of ourse, this
ation passes through a real understanding of thepotential and thetehnologial restri-
tions linked to the AFP proess. Currently, only the tehnologial onstraint on the tow
steering has been integrated in the MS2L strategy. A step forward an be realised by
properlyformalisingandinluding into thedesign problemotherkindsof manufaturabil-
ity onstraints: tows gap and overlapping, the variation of thebre volume fration due
to imperfetions, et. Moreover, from a numerial point of view, the designer ould be
interestedinoptimisingalsothenumberofdesign variables(i.e. thenumberofparameters
tuningtheshapeoftheB-splinesurfaes)involved intoboth levelsoftheMS2Lproedure:
this point an be easily taken into aount by exploiting the original features of the GA
BIANCA. Finally, further modiations may also be onsidered in theformulation of the
design problem depending on the nature of the onsidered appliation, e.g. by inluding
proess,osts, et.
Researh isongoing onall oftheprevious aspets.
Referenes
[1℄ Z. Gürdal, B.F. Tatting, and K.C. Wu. Variable stiness panels: Eetsof stiness
variationonthein-planeandbuklingresponses.Composites PartA:AppliedSiene
and Manufaturing, 39(9):1122, 2008.
[2℄ M.W.HyerandH.H. Lee. Theuseofurvilinear berformat toimprove bukling re-
sistaneofompositeplateswithentralirularholes. CompositeStrutures,18:239
261, 1991.
[3℄ T.D. Dang and S.R. Hallett. A numerial study on impat and ompression after
impat behaviourofvariableangle towlaminates. Composite Strutures,96:194206,
2013.
[4℄ G. Raju,Z. Wu, B.C. Kim, and P.M. Weaver. Prebukling and bukling analysis of
variable angle tow plates with general boundary onditions. Composite Strutures,
94:29612970, 2012.
[5℄ S.Nagendra,S.Kodiyalam,J.Davis,andV.Parthasarathy.Optimizationoftowber
paths for omposite design. In Proeedings of the AIAA/ASME/ASCE/AHS/ASC
36th Strutures, Strutural Dynamis and Materials Conferene, volume AIAA 95-
1275, NewOrleans, LA,1995. AmerianInstitute ofAeronautis andAstronautis.
[6℄ S. Nagendra, D. Jestin, Z. Gürdal, R.T. Haftka, and L.T. Watson. Improved ge-
neti algorithm forthe designofstiened ompositepanels. Computers& Strutures,
58(3):543555, 1996.
[7℄ M.A.Nik,K.Fayazbakhsh,D.Pasini,andL.Lessard.Surrogate-basedmulti-objetive
optimization of a omposite laminate with urvilinear bers. Composite Strutures,
94:23062313, 2012.
[8℄ M.A. Nik,K. Fayazbakhsh, D.Pasini,and L.Lessard. Optimization ofvariablesti-
nessompositeswithembedded defetsinduedbyautomatedberplaement. Com-
positeStrutures,107:160166, 2014.
[9℄ H.Ghiasi,D.Pasini,andL.Lessard. Optimumstakingsequenedesignofomposite
materials PartI: Constant stinessdesign. CompositeStrutures,90:111,2009.
designofompositematerialsPartII:Variablestinessdesign. CompositeStrutures,
93:113, 2010.
[11℄ M.M. Abdalla, S. Setoodeh, and Z. Gürdal. Design of variable stiness omposite
panels for maximumfundamental frequenyusing laminationparameters. Composite
Strutures,81:283291, 2007.
[12℄ L. Parnas, S. Oral, and U. Ceyhan. Optimum design of omposite strutures with
urved berourses. Composites Siene andTehnology,63:10711082, 2003.
[13℄ S. Setoodeh, M.M. Abdalla, and Z. Gürdal. Design of variable-stiness laminates
using laminationparameters. Composites: Part B,37:301309,