ParisTech Mines - Centre de Formation des Matériaux (CEMEF) Unité Mixte de Recherche CNRS Nr. 7635. 1993 : Ingénieur Chimie des Matériaux (option polymères) Institut des Sciences et Technologies (IST) - Université Paris 6 (UPMC).
4 ENSEIGNEMENT
5 ACTIVITES D’ANIMATION ET DE RAYONNEMENT
6 COLLABORATIONS
7 DIVERS
Activités de recherches
Audrey PACCINI, Développement d'un modèle 3D par éléments finis utilisé pour simuler la chirurgie des tissus mous, 30 novembre 2005. Sami HAMADE, A Study of Convergence Problems of Finite Element Rolling Software for Thin Products (LAM3/TEC3) (2012).
1 AXE I. CONTRIBUTION AUX PROCEDURES D’IDENTIFICATION DU COMPORTEMENT MECANIQUE DES MATERIAUX
Concepts généraux sur les essais mécaniques
- Les essais mécaniques normalisés appliqués aux matériaux standards (non- issus du vivant)
- Des essais mécaniques spécifiques pour les matériaux issus du vivant
- Procédures d’identification
- IDENTIFICATION PAR ANALYSE INVERSE
- FONCTION COUT
- LES ALGORITHMES D’OPTIMISATION
L'essai de traction sera donc privilégié dans le cas d'identification de la régularité du comportement dans une fenêtre de déformation étroite, à condition de pouvoir prélever des échantillons standardisés sur la pièce étudiée. Les méthodes de descente doivent être capables d'évaluer le gradient de la fonction de coût.
Des méthodes de caractérisation adaptées aux matériaux
- Matériaux standards : Identification des paramètres rhéologiques d’un polyéthylène
- CONTEXTE
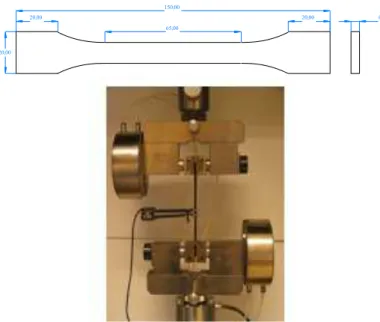
- ESSAIS MECANIQUES (TRR)
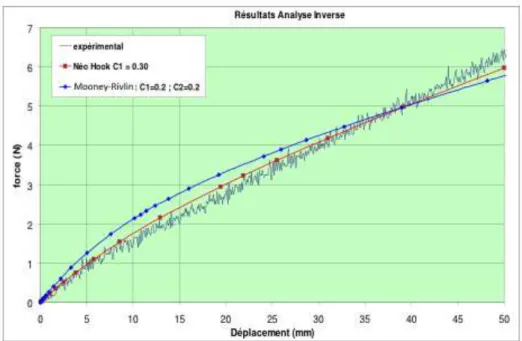
- IDENTIFICATION PAR ANALYSE INVERSE
- Matériaux biocompatibles (silicones) .1 CONTEXTE
- CARACTERISATION MECANIQUE DES ENVELOPPES EN SILICONE
- CARACTERISATION MECANIQUE DE GELS DE SILICONE
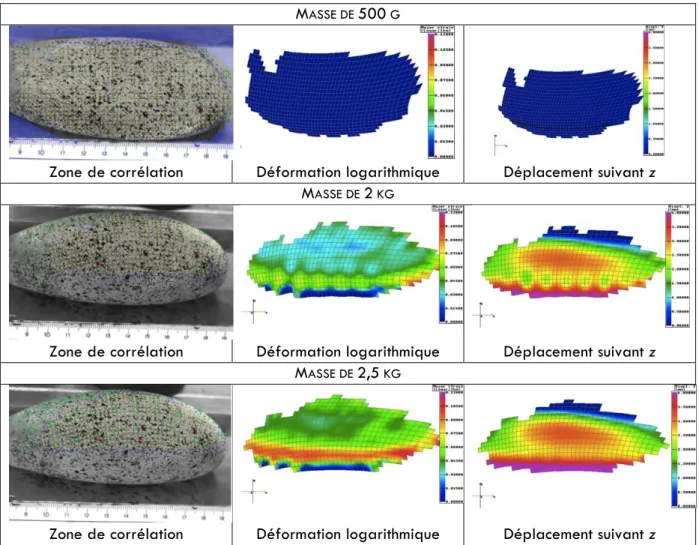
- MISE EN EVIDENCE DES ANOMALIES (SYSTEME ARAMIS)
- Matériaux biologiques : Tissus mous .1 CONTEXTE
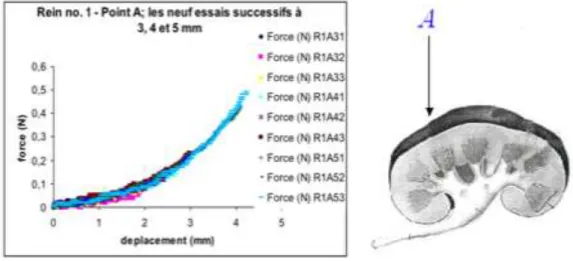
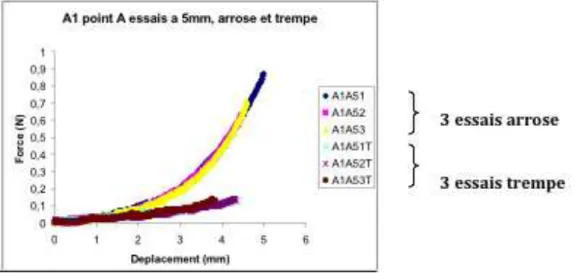
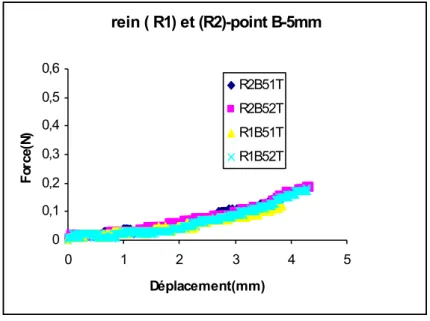
- CARACTERISATION DU COMPORTEMENT RHEOLOGIQUE DE REINS D’AGNEAUX Pour des raisons de simplicité et afin de démontrer la faisabilité des approches d’identification
- Matériaux biologiques : Tissus osseux
- CONTEXTE
- DESCRIPTION ANATOMIQUE DU TISSU OSSEUX
- COMPORTEMENT MECANIQUE DE L’OS
- CARACTERISATION MECANIQUE DE L’OS CORTICAL MANDIBULAIRE PAR ANALYSE INVERSE
- Caractérisation du comportement rhéologique d’organes en ex-vivo immédiat L’étude sur rein ayant été concluante, nous nous sommes intéressés, à défaut de pouvoir réaliser
- DESCRIPTION ANATOMIQUE DE L’UTERUS
- DEVELOPPEMENT DE LA PINCE « RHEOBIOL »
- CARACTERISATION MECANIQUE DU CORPS UTERIN (EX-VIVO IMMEDIAT)
- CARACTERISATION MECANIQUE DU PLACENTA
L'idée principale consiste à évaluer la fonction de coût en quelques points seulement, pour approximer sa valeur aux autres points à l'aide d'une fonction (un méta-modèle). Le temps de calcul est beaucoup plus long qu'avant en raison du temps nécessaire à une simulation CAST3M® du test TRR. De plus, les modèles hyperélastiques de la littérature s’écrivent selon l’un ou l’autre.
L'extensomètre permet d'augmenter significativement la précision de la mesure du déplacement, qui est de l'ordre du micron. La figure 57 montre une courbe typique d'un test de compression d'un échantillon d'os mandibulaire. Un capteur de déplacement (type LVDT) mesure le déplacement de l'ensemble capteur et poinçon par rapport à la partie fixe de la pince.
Nous avons ensuite reproduit notre protocole d'identification pour l'appliquer cette fois à la caractérisation du comportement mécanique de l'ampoule. La pince Rhéobiol a été récemment prêtée au Laboratoire de Biomécanique Appliquée (LBA) de l'IFSTTAR à Marseille. La figure 83 montre la distribution de pression dans le placenta pendant le test de compression simulé en utilisant les paramètres identifiés.
Conclusion
De manière générale, selon les courbes retrouvées dans la littérature, le placenta s'avère légèrement plus rigide en compression qu'en tension, probablement en raison de son incompressibilité.
2 AXE II. CONTRIBUTION A LA MODELISATION NUMERIQUE EN BIOMECANIQUE
Etat de l’art
Méthode des éléments finis (FEM) qui offre également une bonne précision car elle repose sur la résolution de problèmes mécaniques continus au détriment de la rapidité des calculs. Concernant le choix du modèle éléments finis, nous avons d'abord cherché à évaluer les capacités de Forge®, un modèle éléments finis initialement développé en laboratoire pour simuler la mise en forme des matériaux, à modéliser le comportement des tissus vivants. Il serait bon de vérifier si sa formulation est cohérente avec le comportement des tissus mous.
De même, lorsqu’il manipule un organe, il peut se replier sur lui-même voire entrer en contact avec d’autres organes adjacents. Il faudra également vérifier qu’ils sont également efficaces pour contrôler l’interaction entre des tissus aux propriétés très similaires. A ces trois critères principaux s'ajoutent bien entendu les possibilités du code de calcul pour simuler le comportement des tissus biologiques.
Le choix de Forge® comme base de développement de notre simulateur chirurgical nous a donc semblé tout à fait naturel, à condition de pouvoir profiter de ses atouts et de le compléter par des éléments spécifiques à la biomécanique des tissus biologiques.
Présentation du modèle numérique
- Les équations du problème continu
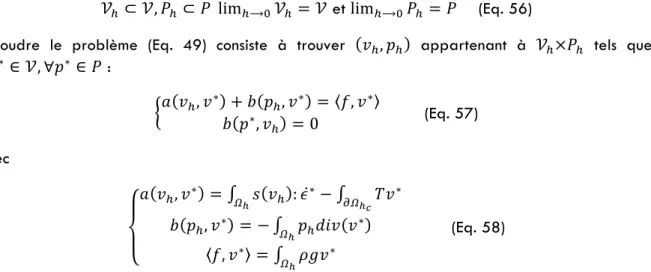
- Formulations faibles du problème
- Discrétisation
- Remaillage et transport
- Résolution incrémentale du système
- Récapitulatif : le système à résoudre
- Hypoélasticité et loi de Hooke
A chaque pas de temps nous essayons de résoudre le système (équation 49) de la manière suivante : Pour le moment. On néglige, de ce fait, les termes qui proviennent de la variation du domaine à chaque incrément de temps. Cependant, une vitesse supplémentaire est ajoutée au milieu de l'élément pour des raisons de stabilité (c'est ce que l'on appelle « la bulle » et qui est représentée par le signe « + » dans le nom de l'élément). 'élément) .
Après un nouveau maillage, il est nécessaire de remapper les données de configuration de l'ancien maillage vers le nouveau maillage. C'est par exemple le cas des parties déviatoriques s du tenseur de contraintes, du tenseur de gradient des déformations F, etc. Pour résoudre cela, on utilise l'algorithme de Newton-Raphson, qui se décompose de la façon suivante.
Notons que la formulation incrémentale (équation 69) n'est nécessaire que dans le cas d'un contact se développant (sinon un seul incrément suffirait).
Prise en compte des grandes déformations
- Hyperélasticité
- Comparaison élasticité linéaire – hyperélasticité
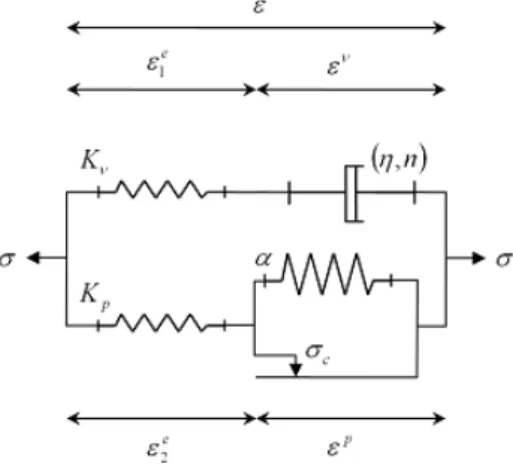
- Vers un comportement visco-hyperélastique
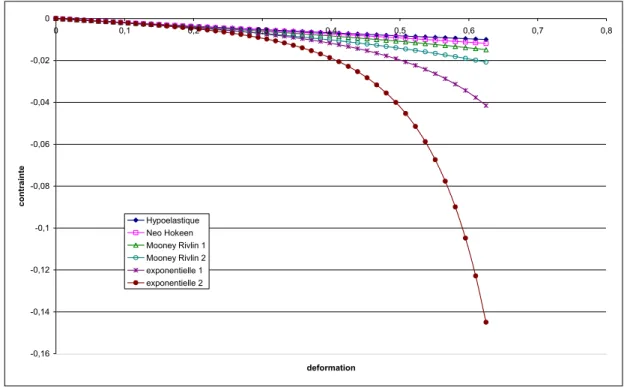
Dans le cas de la loi de Hooke, la contrainte dans la direction de compression z est exprimée par. Dans le cas de Forge®, l'équation est légèrement différente puisqu'à chaque incrément de temps la configuration de référence n'est pas la configuration initiale mais la configuration courante. Pour résoudre le système (équation 77), nous utilisons la même méthode que dans le cas du comportement hypoélastique, décrit précédemment.
Comme dans le cas hypoélastique, nous utilisons la méthode de Newton-Raphson pour résoudre le système (équation 97). Le graphique de la figure 89 a été obtenu après avoir exécuté plusieurs simulations d'un test de compression de cube pour différentes lois de comportement. Comme dans le cas d'un comportement purement hyperélastique, l'algorithme de Newton-Raphson est utilisé pour résoudre le système d'équations non linéaire (équation 107).
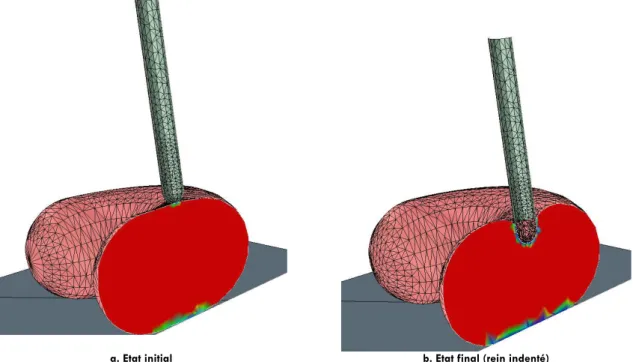
Après confirmation avec l'exemple de la pression du cube (Fig. 90d), cette méthode a été appliquée avec succès à l'évidement du rein.
Prise en compte de l’hétérogénéité du comportement
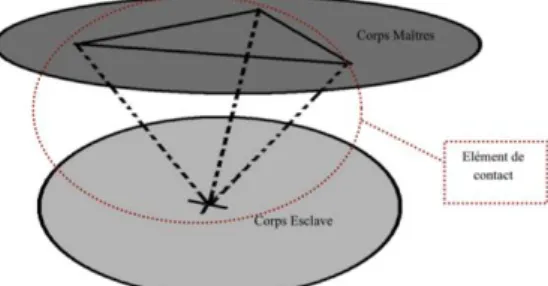
Nous avons choisi de conserver la méthode de punition utilisée dans FORGE® pour imposer les conditions de contact entre différents corps déformables. La version hyperélastique multicorps de FORGE® a été ici encore validée sur un boîtier de traction en forme de cube. Nous avons également essayé de vérifier la capacité de retour élastique du modèle lorsque toute tension est relâchée.
Nous avons constaté que le cube a repris sa forme initiale et que les contraintes internes s'annulent. Là encore, lorsqu'on a relâché la tension, le retour élastique a été total : la hauteur finale du cube est identique à la hauteur initiale. Cependant, nous avons remarqué un petit problème sur les bords du cube et sur les coins après résolution.
L'utilisation d'un contact adhésif bilatéral entre le cube et les outils implique une déformation importante des éléments du cube qui sont en contact avec l'outil.
Prise en compte de gestes spécifiques
Importance de l’imagerie médicale
Analyse de différentes problématiques biomécaniques
- Indentation d’un rein d’agneau
- Modélisation de gestes chirurgicaux rencontrés en gynécologie
- PALPATION UTERINE
- EXPLORATION DES TROMPES DE FALLOPE
- Modélisation de la chirurgie de l’œil .1 CONTEXTE DE L’ETUDE
- DESCRIPTION ANATOMIQUE DE L’ŒIL
- TRAITEMENT DE LA DMLA PAR TRANSLOCATION MACULAIRE
- MODELISATIONS D’OPERATIONS DE TRANSLOCATION MACULAIRE PAR PLICATURE INTERNE
- MODELISATIONS D’OPERATIONS DE TRANSLOCATION MACULAIRE PAR PLICATURE EXTERNE
- Modélisation d’implants dentaires .1 CONTEXTE DE L’ETUDE
- MODELISATION D’UN IMPLANT DENTAIRE DANS UNE PIECE OSSEUSE
- Simulation de gestes chirurgicaux en gynécologie
- Développement de dispositifs médicaux (prothèses mammaires)
- MODELISATION D’UN ESSAI DE COMPRESSION
- MODELISATION D’UNE PROTHESE MULTIGEL
- MODELISATION DES PLIS
- VERS LA MODELISATION DU COMPORTEMENT EN FATIGUE DE PROTHESES
- VERS LA MODELISATION DE L’IMPLANTATION DE LA PROTHESE
- Modélisation en chirurgie maxillo-faciale Contexte de l’étude
Cette dernière est le siège de la vision centrale et se situe le long de l'axe optique. Avec une telle pression, le déplacement maximum enregistré au niveau de la sclère est de l'ordre de 3,5.10-2 mm. La figure 104 montre le résultat d'un calcul obtenu avec un module d'Young de la rétine fixé à 500 Pa.
Le module d'Young utilisé pour l'os (3000 MPa) est celui identifié par analyse inverse lors de la première phase de l'étude (§1.2.4.4). La figure 112 montre le résultat de la simulation du test de compression de l'ensemble os-implant. La courbe rose de la figure 113 correspond à une tentative de modélisation de l'os à l'aide d'un modèle d'endommagement.
Le résultat de la modélisation d'une série d'interventions chirurgicales est présenté à la figure 116.
3 PERSPECTIVES DE RECHERCHE
Caractérisation des matériaux
Modélisation numérique
Concernant l'anisotropie, il faudra en tenir compte lorsqu'on s'intéresse à des organes ou tissus qui présentent des directions privilégiées comme celles liées aux fibres musculaires ou à la microarchitecture osseuse. Cependant, le remodelage osseux peut impliquer une « création matérielle » comme dans le cas par exemple d'une opération de distraction. La poursuite de nos travaux dans ce domaine, notamment dans le cadre anticipé du développement de nouveaux types de distractions, nécessitera de prendre en compte ce phénomène.
La grande précision du modèle développé dans le cadre de la chirurgie maxillo-faciale peut ouvrir de très nombreuses applications, à commencer par l'aide à la conception de nouveaux dispositifs médicaux, tels que des attracteurs palatins ou sublinguaux, à ancrage dentaire ou osseux. De manière générale, du fait de la proximité (tant géographique qu'académique du fait de nombreuses collaborations dans le passé, notamment avec l'équipe du Pr. Marc BOLLA) du CEMEF avec la Faculté d'Odontologie de Nice, je compte étudier les différents aspects couverts par la médecine dentaire. chirurgie. Cette année un nouveau projet ANR a été déposé, que j'ai accepté de coordonner, en collaboration avec l'INSA Lyon (Eric MAIRE) pour leur expertise en microtomographie et tests in situ, et avec l'équipe du Dr.
Brigitte GROSGOGEAT de la Faculté de Médecine Dentaire de Lyon pour leur expertise en composites dentaires.
Intégration et valorisation de la recherche
1 ENSEIGNEMENT ET FORMATION A LA RECHERCHE
Enseignement
Le stage DEA d'Ahmed Sabri, intitulé « Caractérisation mécanique des matériaux biologiques », a été l'occasion de poser les bases des outils de caractérisation des tissus mous et des outils numériques en les appliquant aux reins d'agneau. Le stage PFE de Catherine Priou, intitulé « Modélisation numérique en implantologie dentaire », a permis de réaliser les premières simulations d'implants dentaires intégrés à la mâchoire inférieure. Le stage de MS de Christophe Cocco, intitulé "Etudes expérimentales et numériques du comportement mécanique des prothèses mammaires", a constitué l'introduction à la thèse CIFRE de Hicham Daanouni.
Ghazza Boulila a également travaillé dans le cadre de son stage MS sur un sujet très similaire puisqu'il s'agissait de « l'étude expérimentale de l'adhésion entre un gel et une enveloppe de silicone. Le stage de Master de Charles Savoldelli intitulé "Identification des propriétés biomécaniques de l'os mandibulaire en vue de sa modélisation numérique" a été réalisé en soutien de la thèse de Guillaume Odin sur "Modélisation numérique de l'os mandibulaire appliquée à l'implantologie dentaire et maxillo-faciale". Il a également été épaulé par Raounak Loudad dans le cadre de son stage MS, qui a notamment travaillé sur la création du modèle 3D de masse faciale.
Enfin, le stage MS de Ziad Chebbo, en collaboration avec la société GDF-SUEZ, lui a permis de se familiariser avec les cuisinières en polyéthylène utilisées par la société gazière.
2 IMPLICATION DANS LA COMMUNAUTE SCIENTIFIQUE
Il est actuellement en dernière année de thèse au CEMEF et travaille à nouveau sur « l'optimisation du soudage par électrofusion des tubes et accessoires en polyéthylène » pour GDF-SUEZ.
3 EXPERTISE SCIENTIFIQUE ET TECHNOLOGIQUE
Analyse tridimensionnelle par éléments finis des charges fonctionnelles à différents emplacements osseux causées par des implants placés dans le plancher du sinus maxillaire postérieur. Modèle de parallélisation SPMD pour simuler les processus de formation de matériaux.