Enfin, nous présentons une dernière méthode d'identification à partir de la mesure du champ de pression rayonné. A l'exception de la méthode HELS, elles sont sensibles à l'erreur de mesure compte tenu de l'inversion des équations.
Calcul de la pression en un point des domaines couplés
Comme précédemment, cette expression peut être discrétisée et on peut donc exprimer la pression au point M comme une somme des contributions des spots de la surface Σ′e. Dans cette comparaison, nous utilisons les impédances acoustiques ainsi que la vitesse à la surface de la source.
Formulation iPTF
Identification de la vitesse de source
Pour l'application de la méthode dans sa formulation inverse, l'identification repose sur une mesure du champ acoustique rayonné. Ceux-ci sont calculés de la même manière qu'au paragraphe §2.1.3 à l'aide d'une modélisation du volume formé en éléments finis.
Identification de la pression et de l’intensité
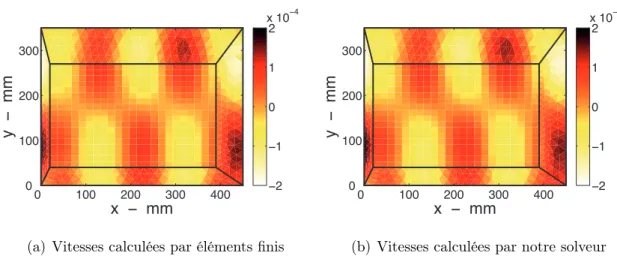
Nous souhaitons ici réaliser une première étude numérique permettant de valider le principe de la méthode iPTF. Les champs de référence à la surface de la plaque (vitesse, pression et intensité) seront calculés par une méthode des éléments finis.
Résolution du problème de rayonnement
Champs de vitesse, pression et intensité pariétales
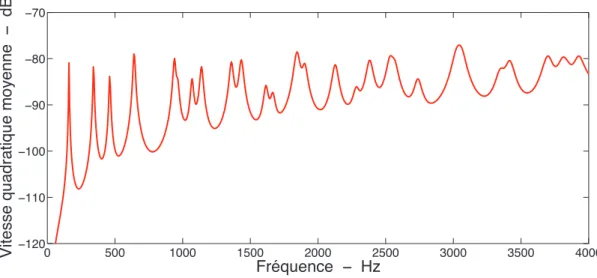
En comparant les fréquences propres calculées numériquement avec celles calculées analytiquement avec la relation (3.1), nous concluons que, pour les 34 modes propres de la plaque compris entre 0 et 4000 Hz, nous atteignons un ordre de 8 dans la direction x et un ordre de 6 dans la direction x. direction y. .
Champs de vitesses et de pressions rayonnés
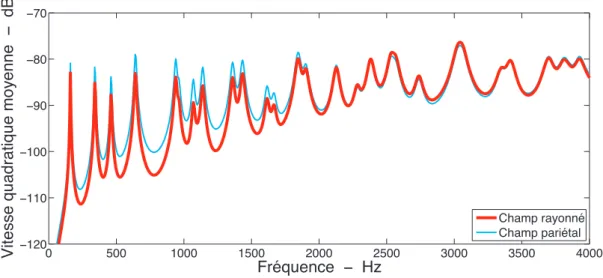
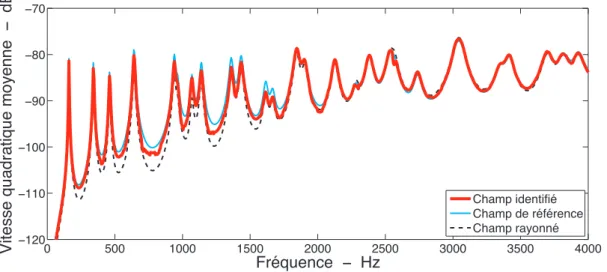
De plus, du fait de l'éloignement de la surface de mesure, la courbe du champ rayonné reste plus basse que la courbe du champ pariétal. Pour expliquer cela, rappelons que nous nous intéressons à la composante de la vitesse qui est normale à la surface.
Résolution du problème d’identification
- Identification du champ de vitesses de vibrations
- Identification du champ de pressions pariétales
- Identification du champ d’intensités
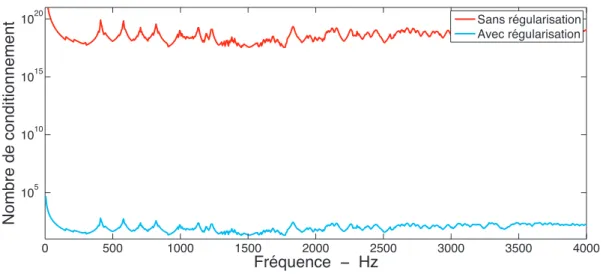
- Régularisation du problème inverse
- Champs de déplacements normaux et vitesses normales
- Résolution intégrale du problème de rayonnement
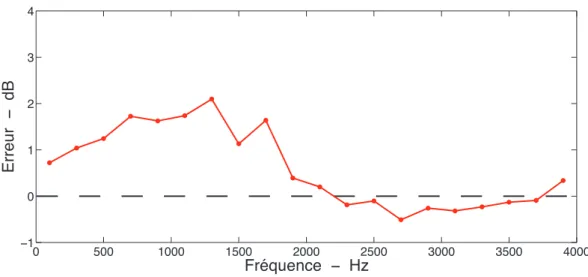
Il s'agit simplement de la différence entre les courbes Champ identifié et Champ de référence illustrées dans la figure (3.6). L'équation du mouvement du cas étudié sera utilisée pour déterminer le champ de vitesse de vibration de la source. La connaissance de ce domaine permettra alors de résoudre le problème du rayonnement de la plaque.
La résolution de l'équation (4.2) permet de déterminer les modes propres ainsi que les pulsations propres de la plaque.
Validation du code de calcul
- Introduction
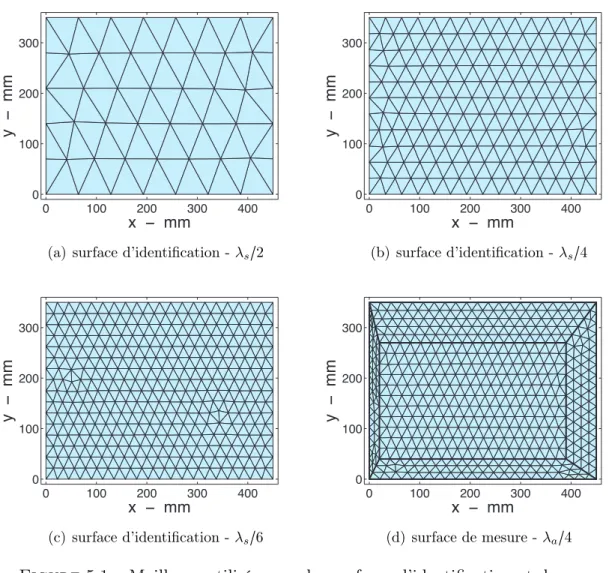
- Maillage de la surface d’identification
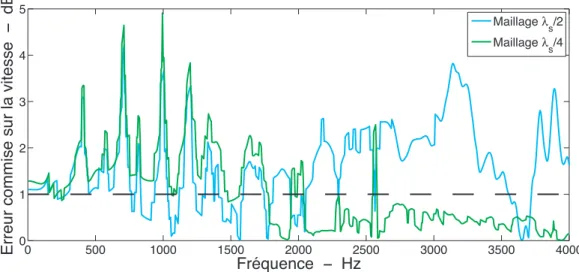
- Limitation de la finesse du maillage d’identification
- Maillage de la surface de mesure
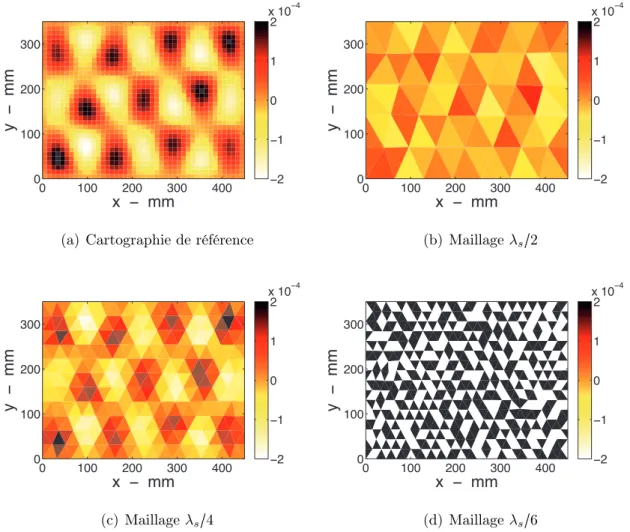
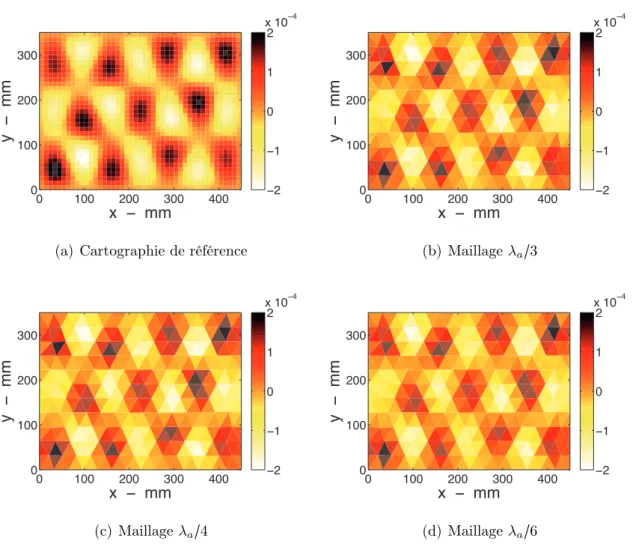
La première est celle imposée par la mesure de la pression et de la vitesse des particules. La longueur d'onde est calculée à partir de la vitesse des ondes et de la fréquence du phénomène étudié (cf. 5.1). En effet, sur la figure (5.2(c)) on retrouve plus facilement les lignes de nœuds de la dalle.
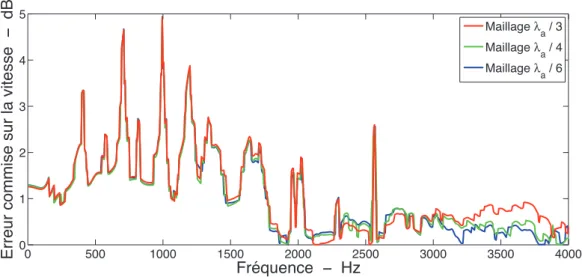
Les maillages de la surface de mesure ainsi créés ont été définis en λa/3, λa/4 et λa/6.
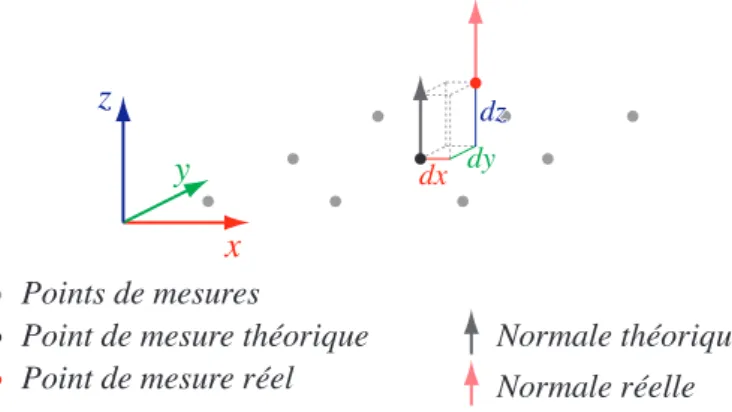
Erreur de positionnement des capteurs
Introduction
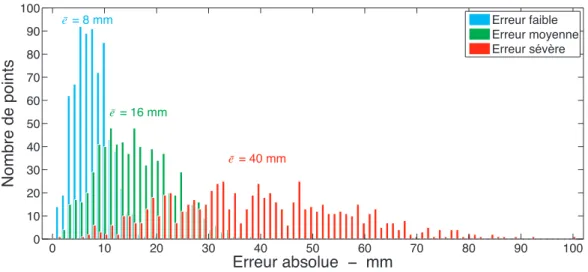
Mith(xith; yith; zith) ↝Mi(xith+δxi; yith+δyi; zith+δzi) (5.8) Nous nous concentrerons ensuite sur l'erreur absolue entre le point théorique et le point de mesure réel. Les figures et le tableau présentés sur les deux pages suivantes permettent de visualiser et de quantifier la dégradation de la surface de mesure pour les différentes erreurs de positionnement appliquées. Les histogrammes représentés sur la figure (5.10) comptent les points de mesure en fonction de l'erreur e, représentée dans l'équation (5.9).
Figure 5.10 – Répartition des erreurs de positionnement pour les trois surfaces altérées Type d'erreur Paramètres de la loi normale Erreur moyenne.
Champ rayonné
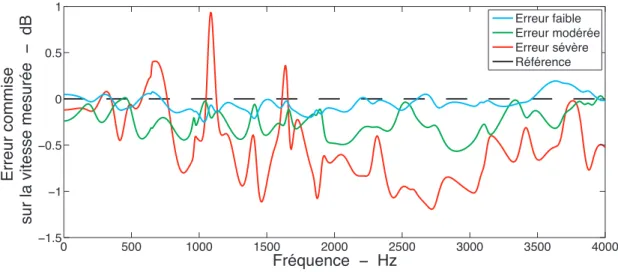
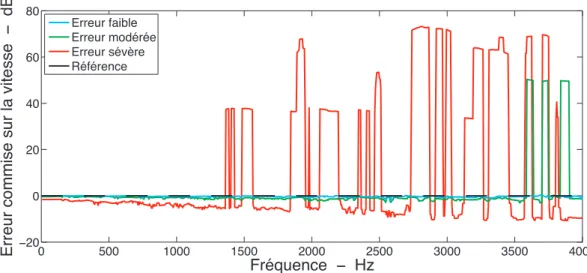
Figure 5.11 - Erreurs causées par un placement incorrect des capteurs lors de la mesure des champs de vitesse rayonnés. La figure (5.12(a)) représente la carte de mesure sans erreur observée précédemment. Conformément à nos attentes, nous pouvons constater que le champ des vitesses mesurées est de plus en plus discontinu et chaotique à mesure que l’erreur augmente. a) Mesure sans erreur de position.
Identification des vitesses de vibration
Il apparaît donc que le déplacement acceptable du capteur lors de la mesure est limité par la longueur d'onde du phénomène acoustique. Si par contre on étudie la fréquence à partir de laquelle l'identification devient erronée pour les deux autres cas, on retrouve une fréquence de l'ordre de 1 400 Hz pour l'erreur sévère et 3 500 Hz pour l'erreur modérée. On retrouve alors des valeurs qui sont de l'ordre de six fois l'erreur moyenne correspondante.
Influence d’un bruit de mesure
Introduction
X∣⋅(p+1) ⋅ei(ϕ+∆ϕ) (5.11) Cette notation permet d'exprimer l'erreur en partie de modification d'amplitude et en partie d'avance ou de retard de phase par rapport à la valeur théorique de la signal. L'expression (5.11) fait intervenir les deux variables p et ∆ϕ représentant respectivement le pourcentage de l'erreur d'amplitude et de l'erreur de phase. Xclear∣(p+1) − ∣Xclear∣2 =∣Xclear∣p (5.13) Cet écart type définit un cercle d'erreur dans le plan complexe qui permet de représenter σ∆ϕ à partir de considérations géométriques (Figure 5.16).
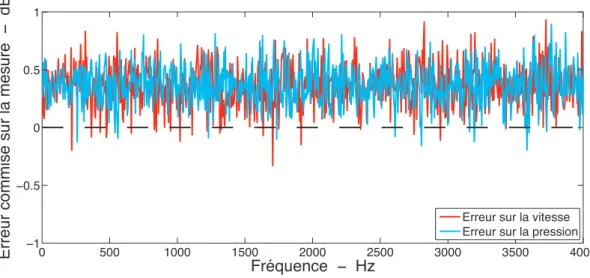
Dans ce chapitre nous présenterons les résultats correspondant aux deux études réalisées lorsque l'erreur était ajoutée à la mesure de pression ou à la mesure de vitesse.
Champ rayonné
Figure 5.17 – Erreur moyenne commise par le système de mesure dans l'estimation de la pression et de la vitesse rayonnée. Sur la figure (5.18(b)), nous traçons également la vitesse exacte mesurée et la vitesse mesurée avec le bruit. On constate alors que lorsque la vitesse est faible, l'erreur commise sur la mesure est faible, tandis qu'à vitesses élevées, l'erreur commise est plus importante.
Erreur de vitesse Erreur d'impression. a) Erreur commise en un point par le système de mesure dans l'estimation de la pression et de la vitesse rayonnée.
Identification des champs de vitesses
On trace ensuite sur la figure (5.22) les spectres de vitesse identifiés avec ou sans erreur commise lors de la mesure de la vitesse. Comme précédemment, on constate que la localisation des sources se fait très correctement malgré l'erreur dans la mesure de la pression. Enfin, nous traçons sur la figure (5.24) les spectres de vitesses identifiés avec et sans erreurs commises lors de la mesure de pression.
Cela semble indiquer une limitation de l’erreur pouvant être commise lors de la mesure de la pression.
Conclusion
- Définition des maillages
- Précision apportée dans le positionnement des capteurs
- Précision des moyens de mesure
- Pose du problème de rayonnement
- Résolution du problème et calcul du facteur de rayonnement
- Représentation du facteur de rayonnement
Comparaison des vibrations mécaniques du plateau Les vibrations mécaniques du plateau confirment la comparaison. Cette nouvelle écriture du facteur de rayonnement permet désormais de mettre en évidence son évolution en fonction de la pulsation. Ces ondes sont créées par une vibration propagée de flexion de la plaque dans les directions Ð→x et Ð→y.
Ces ondes sont créées par une vibration évanescente de flexion de la plaque dans les directions Ð→x et Ð→y.
Définition de la profondeur de pénétration des ondes évanescentes
Ils sont rayonnants pour toutes les pulsations et ont un facteur de rayonnement (6,26) inférieur à 1. 6.2 Définition de la profondeur de pénétration des ondes évanescentes. Il est important de préciser ici que ces courbes ne représentent que l'allure de la pression et de la vitesse rayonnées. On voit que les ondes de très basse fréquence peuvent être captées très loin de la plaque.
Cependant, à partir de la valeur ω = ωc/2, la profondeur de pénétration recommence à augmenter pour devenir maximale pour ωc.
Conséquence de la non prise en compte du champ évanescent
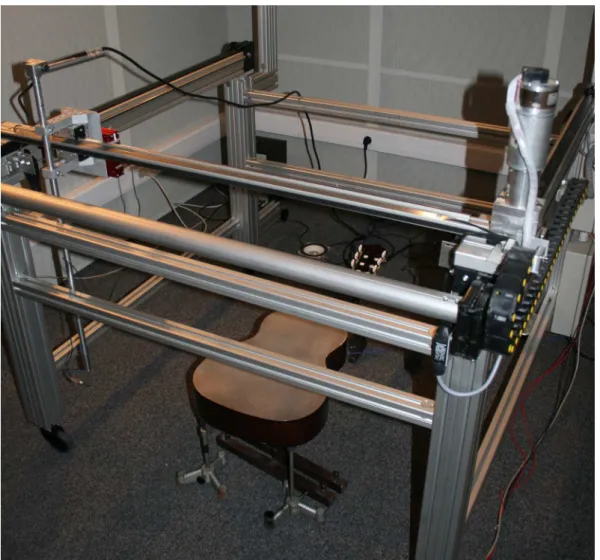
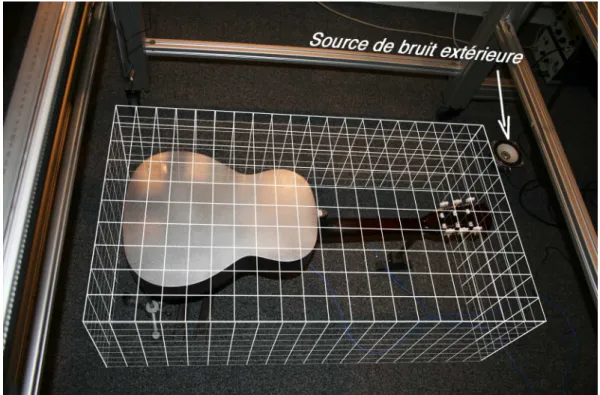
Présentation générale de la manipulation
Pour utiliser la méthode iPTF, on discrétise la surface de la guitare en surfaces élémentaires triangulaires ou quadrilatérales. Ainsi, sur la figure (7.2) nous présentons la géométrie discrétisée de la guitare et ses dimensions. Sur ce schéma on peut également voir le système utilisé pour stimuler les vibrations de la guitare.
Selon la formulation utilisée pour la méthode iPTF, on définit une surface autour de la guitare qui l'entoure complètement.
Identification des champs de vibrations de la source
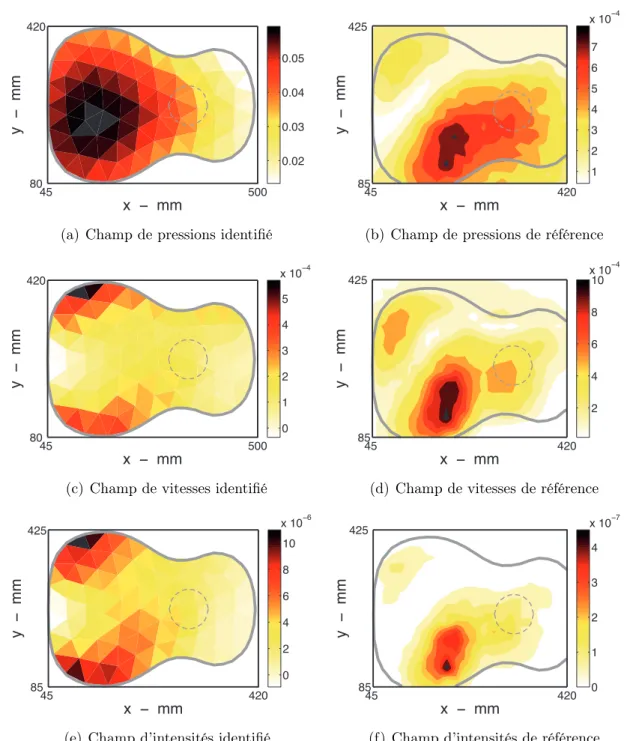
La figure (7.8) montre les résultats de l'identification des champs de pression, de vitesse et d'intensité à 350 Hz par rapport à ceux mesurés directement. Il existe des similitudes entre les champs identifiés et les champs mesurés, même si à cette fréquence il est difficile de dire que l'identification est réussie.
Limitations de cette étude
La figure (7.8) présente les résultats de l'identification du champ de pressions, de vitesses et d'intensités à 350 degrés. Cependant, cette mesure délicate n’a pas été possible et nous avons réalisé une approximation de surface rigide. Une autre possibilité aurait été de considérer la surface du sol comme surface d'identification de la vitesse de vibration, mais nous avons supposé que le niveau de vitesse du tapis aurait été négligeable par rapport à la contribution de la vitesse de vibration de la guitare au son rayonné. .
Identification des champs de vibrations de la source en environne-
Ce travail de recherche est né dans le cadre de la résolution du problème inverse en acoustique. Dans la formulation proposée, nous décomposons la solution du problème inverse basée sur les modes propres de la cavité acoustique considérée comme rigide. Nous décomposons la pression dans le volume virtuel en fonction des modes propres de la cavité à paroi dure.
De même, les champs identifiés sont affichés par facettes et non de manière continue.
Variables
Constantes
Notations mathématiques
Notations matricielles
Notations complexes
Opérateurs de moyennage
Acronymes
Structure BaseModale
Cette structure BaseModale contient les valeurs de la base modale en terme de pression pour chacun des points du maillage éléments finis définis pour la cavité acoustique modélisée.
Structure Maillages
Structure Mesures
Algorithmes des programmes utilisés
Programme principal
Calcul des impédances de rayonnement
Calcul de la vitesse
5 Taux identifiés (fréquence idF, .) ← PTFInverse(impédances, mesures, masques, idPatchesMesure, idPatchesIdentification, fréquence idF) {Calcul de pression}. 6 pressionsIdentifiées (fréquence idF, .) ← impédances (idPatchesIdentification, .) * i * 2 * pi * Mesures.fréquence (fréquence idF) * [vitessesIdentifiées (fréquence idF, .); Vitesses mesurées (fréquence idF,. L'équation d'onde pour les vibrations de flexion libre de la plaque (également considérées comme isotropes) est écrite.
La première de ces deux solutions correspond à des ondes de courbure évanescentes, tandis que la seconde correspond à des ondes de courbure se propageant.
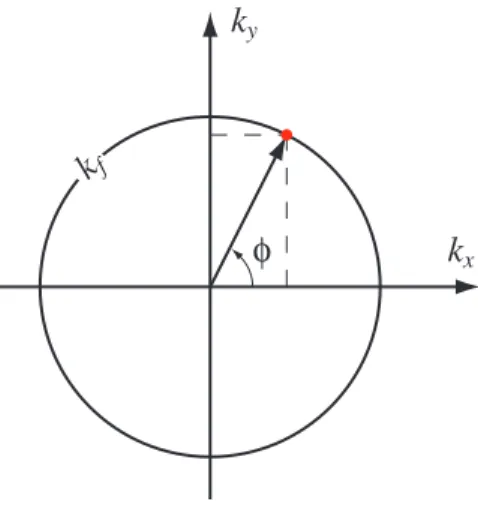
Propagation des ondes acoustiques
Ainsi, une onde se propageant dans une direction φ peut être représentée sur le disque de rayon kf (figure C.1). Figure C.1 – Représentation dans le plan x, ky d'une onde de flexion se propageant dans la direction φ. Compte tenu de notre convention de signe, l'expression Bze−ikzz correspond à une onde se propageant dans la direction −Ð→z.
Les composantes kx et ky du vecteur d'onde sont incluses dans l'expression p(x, y,0), qui représente la pression sur la plaque et donc imposée par celle-ci.
Couplage des phénomènes vibratoires et acoustiques
Ce dernier résultat introduit dans (C.13) permet enfin d'expliquer la valeur de la pression rayonnée en tout point de l'espace. La condition de continuité entre la plaque et le milieu acoustique impose également une égalité des nombres d'ondes suivants Ð→x et Ð→y, soit une égalité de termeskx entre eux, ainsi que des termes ciel entre eux, dans les deux relations (C. 9) et (C.14). Pour être pleinement pris en compte, le couplage vibrations et phénomènes acoustiques doit prendre en compte les interactions fluide-structure, mais ces interactions peuvent être négligées dans notre cas, puisque notre étude est réalisée dans un fluide léger.
Impédance et facteur de rayonnement
C'est ce qu'on appelle l'identification des champs de vitesse, de pression et d'intensité à l'aide de la méthode PTF. Elle s'appuie sur la formulation inverse de la méthode PTF (Patch Transfer Functions) et sur la mesure de la pression et de la vitesse des particules du champ acoustique rayonné. En revanche, une erreur dans la mesure de la vitesse des particules modifie légèrement la cartographie du champ de vitesse.
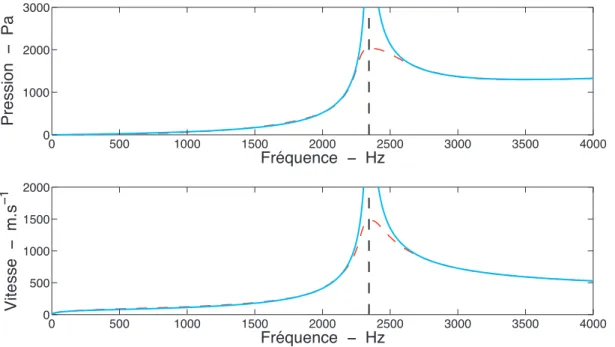
Figure 10 - Spectres de pression et de vitesse définis en fonction de l'épaisseur de la plaque.