Qres la puissance totale injectée dans le bâtiment (chauffage et apports intérieurs et gratuits) Résistance Rf associée aux pertes linéaires entre la partie intérieure et extérieure (modèle . R3C2). Dans ce chapitre, nous présentons la problématique considérée dans cette thèse, en commençant par une description du contexte industriel et des enjeux liés à une meilleure compréhension du modèle thermique du bâtiment, puis une présentation des objectifs et du contexte de l'application et en bas. une synthèse des approches précédentes et une analyse de leurs avantages et limites par rapport aux objectifs énoncés dans cette thèse.
Motivations et enjeux
Motivations
Enjeux
Problématique
Présentation du problème
Le résultat de ces interactions est une température interne donnée, qui est à son tour prise en compte par le système de régulation thermique. La prise en compte de ce couplage a transformé le problème de l’état libre en un problème en boucle fermée.
Données et contraintes
- Présentation des données
- Les contraintes
Qu'il s'agisse de température intérieure ou de température relevée, la question se pose du nombre de zones thermiques à considérer en fonction de l'homogénéité ou non du degré de confort recherché dans les différentes pièces. Dans le cadre de la thèse, nous considérons le cas monozone : une seule température est définie en fonction de la température de consigne choisie.
Objectifs de la thèse
En revanche, selon la direction du bâtiment, la température de consigne est toujours informative : ä si elle est inégale : le besoin du client n'est pas précisément formulé, il est donc difficile d'évoquer surtout l'économie d'énergie en minimisant l'énergie. utilisé pour le chauffage sans réglage de référence fixe.
Approche proposée
Il s'agit d'un modèle à cinq paramètres dont l'entrée est constituée des données météorologiques (température extérieure et flux solaire) et de la courbe de charge électrique (chauffage et apports internes) et la sortie est la température intérieure du bâtiment. Ainsi, pour enrichir le contenu informatif des données, nous avons exploité une connaissance a priori des paramètres, basée sur une expertise en thermique du bâtiment.

Organisation du document
Modèles statiques
- Premier exemple : signature énergétique simple
- Deuxième exemple : variation de température extérieure et
- Avantages et limites
L'équation 2.2 peut être encore simplifiée en supposant de très faibles variations de la température interne du bâtiment, le bilan thermique du bâtiment ne nécessite plus de mesures de la température interne et peut être exprimé sous la forme Variante utilisant les degrés jours Il peut également être intéressant de comparer des bâtiments situés dans différentes zones climatiques ou d'évaluer leurs besoins en chauffage non pas pour une température extérieure donnée, mais en fonction de la sévérité du climat.
Modèles dynamiques
- Modèles de « signature énergétique »
- Modèles thermiques détaillés
- Modèles réduits
La résolution de l’équation de la chaleur à l’échelle du bâtiment nécessite que les conditions aux limites du système analysé soient prises en compte. Pour les échanges convectifs de la surface externe de la paroi : le flux échangé est φCE = hCE(TAE−TSE).
Les méthodes d’identification en thermique du bâtiment
Identification de composants de la paroi du bâtiment
Il est facile à adapter pour prendre en compte les caractéristiques spécifiques du bâtiment (point d'injection d'énergie solaire, raccordement à une autre zone thermique, etc.). C’est en partie cet aspect géométrique du rayonnement solaire qui introduit des termes dépendant du temps dans les équations thermiques des bâtiments.
Objectifs de l’identification et choix inhérents
- Identification pour le diagnostic
- Identification pour la commande
Ces résultats mettent néanmoins en évidence la sensibilité de la méthode au choix de la fréquence de coupure du filtre passe-bas. Bien que la solution développée soit plus intéressante que des rappels à une certaine heure ou en fonction de la température extérieure, l'efficacité du système de contrôle flou montre une grande sensibilité selon le nombre de règles floues utilisées.
Modèle retenu dans la thèse - le modèle R3C2
Ils ont pour objectif de décrire les variations brutes de consommation d'énergie en fonction de l'écart entre la température extérieure et une température intérieure fictive. Ces modèles, développés sous forme de réseau, dépendent généralement de la géométrie du bâtiment.
La procédure d’identification
Les étapes préliminaires
Ce chapitre est consacré à présenter la procédure d'identification, à mettre en évidence ses limites dans le cas de problèmes mal posés et à présenter des outils mathématiques permettant de quantifier l'adéquation entre le modèle d'identification et la richesse. En effet, la connaissance des équations régissant la dynamique du système permet de choisir à l'avance une structure pour l'identification.
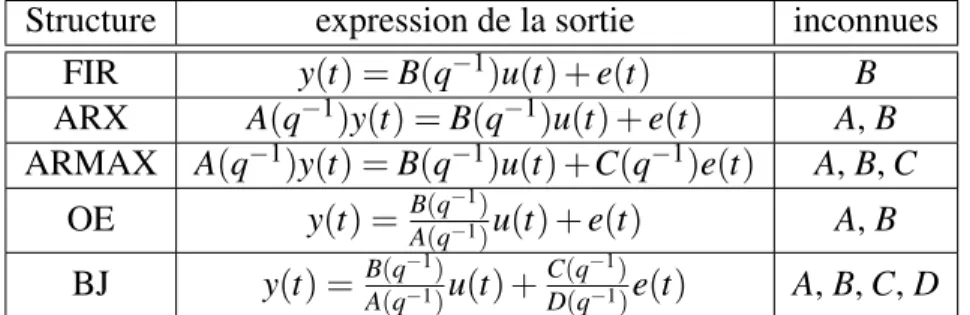
Structures de modèle et étapes clés
Dans ce cas, la définition de la structure inclut l'ordre du modèle (il ne faut pas confondre la taille de la matrice A avec le polynôme dans le cas d'une écriture sous forme de fonction de transfert), mais aussi le paramétrage des matrices d'état : expression de A, B, C et D en fonction de θ. Pour simplifier on considère le cas d'une régression linéaire de la forme : y(t) =φT(t)θ+v(t) , v étant un bruit corrélé à φ (en cas d'erreur sur les variables par exemple ), auquel cas l’estimateur des moindres carrés ˆθ est biaisé.
Enjeu et limites
Construction d'un modèle : C'est l'étape d'identification elle-même, elle consiste à déterminer le modèle qui décrit le mieux le fonctionnement du système réel, parmi tous les modèles de la classe présélectionnée. Validation : Il s'agit d'une étape importante qui permet de consolider les choix effectués pour l'identification ou de remettre en question certaines étapes, notamment.
Identifiabilité
Définition
Le but de l'étude d'identifiabilité est de vérifier que le minimiseur du critère est unique sans garantir que le système réel accepte la même structure que celui adopté pour l'approche d'identification. Sur la base de cette observation, l'identifiabilité locale d'une structure de motif donnée peut être mesurée en calculant l'identifiabilité Gramian.
Expérience informative pour une structure donnée
- Contenu fréquentiel
- Erreur de convergence et matrice d’information de Fisher
La matrice d'informations Fisher est calculée à partir des caractéristiques de la structure comme suit. Le calcul de la matrice d'information permet d'évaluer la borne inférieure de la variance de l'erreur de convergence sur les paramètres.
Identification d’un système MISO ou en boucle fermée
Identification d’un système multi entrées
L'expression exacte de cette variance a été calculée dans le cas des structures BJ et OE par Ninness et Hjalmarsson [53], qui ont montré son indépendance par rapport aux entrées ui. Cependant, ces résultats ne s'appliquent pas aux structures ARX et ARMAX, pour lesquelles Gevers et al [24] montrent que chaque entrée contribue à la réduction de cette variance et augmente la précision des transferts associés aux autres entrées.
Identification en boucle fermée
Dans la troisième partie nous présentons les résultats de l'identification et de l'évaluation de la structure du point de vue de l'identifiabilité et du caractère informatif des requêtes. Le principe général et les étapes de la procédure d’identification ont été présentés dans le chapitre précédent.
Quelle écriture pour l’estimation ?
Un critère de sélection qui permet de choisir, dans une classe déjà déterminée par le choix d'une structure, le modèle dont la dynamique explique le mieux les informations contenues dans les signaux. En sélectionnant comme composante d'un vecteur
Estimation paramétrique
Modèle de bruit pour l’identification
E−Tint)(état de l’intégrateur), le système précédent est mis sous la forme d’un état compatible avec la modélisation de la Figure 4.3. Il est facile de vérifier que l’identité précédente ne peut pas être modifiée par un changement d’état fondamental.
Prédicteur optimal
En remplaçant H0 et G0 par leurs expressions de représentation d’état, nous montrons que le modèle d’estimation récursive l’est. Puisque nous nous sommes placés dans un cadre de minimisation des erreurs de prédiction, le critère à minimiser dans ce cas est :
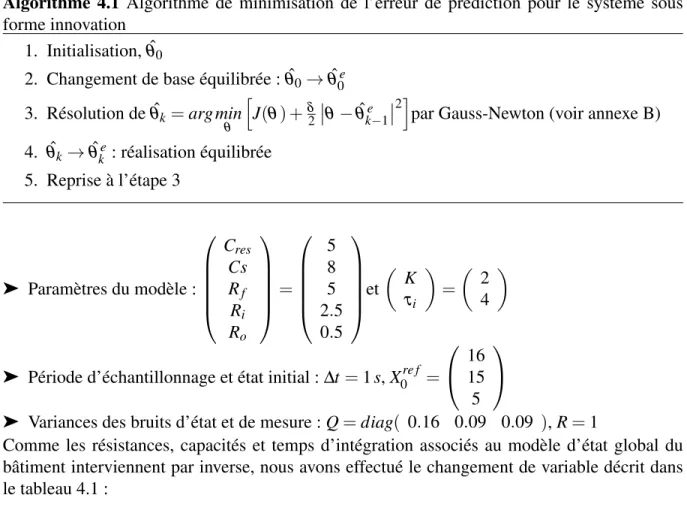
Algorithme de minimisation du critère
Étude préliminaire du modèle global
Sensibilité globale
Il s'agit d'étudier la somme des écarts quadratiques sur la courbe de charge dans l'espace paramétrique pour différentes configurations des paramètres de la structure. Parce que la dimension de l'espace paramétrique est élevée (7), nous avons choisi de modifier deux paramètres dont les contributions sont corrélées (à la fois le travail sur l'air et les murs intérieurs clairs du bâtiment) : la capacité de l'airCres et le gainK du régulateur.
Identifiabilité locale
- Gramien d’identifiabilité
- Sensibilité locale de l’observation
Pour quantifier la sensibilité de Qch à une variation infinitésimale de chacun des paramètres, nous proposons d'évaluer ∂y(t,θ)ˆ. La grandeur Y permet de quantifier la sensibilité de sortie, autour de la solution nominale associée à U et X0, et ce par rapport aux variations des sept paramètres.
Analyse des résultats et validation
- Analyse des données d’entrée
- Résultats d’identification
- Validation/Invalidation statistique
- Inversion Bayésienne
- La simulation stochastique
- Chaîne de Markov
- Algorithme de Metropolis-Hastings
- Algorithme de Gibbs
Dans les deux cas, le choix implique une simplification de la probabilité d’acceptation et présente souvent de bonnes propriétés de convergence de l’algorithme. Le choix de l'algorithme de Gibbs est motivé par ses hautes performances et par la propriété de multilinéarité de la dynamique du bâtiment, qui, dans le cadre gaussien adopté ici, simplifie grandement les expressions des lois conditionnelles des inconnues.
Application de la méthode de Gibbs au modèle R3C2
- Formulation du problème
- Prise en compte de la régulation
- Discrétisation
- Expressions des lois conditionnelles pour les paramètres
- Simulation de Z t conditionnellement à X et Z g
- Simulation de Z g conditionnellement à X et Z t
- Échantillonneur de Kalman
- Le filtre
- Le lisseur
- L’échantillonneur
- Données utilisées
- Résultats de simulation
- Connaissance a priori non biaisée des paramètres
- Biais sur les lois a priori des paramètres
La procédure de simulation conditionnelle continue ensuite de revenir à X1 à partir de la factorisation de π(Xk,Xk+1|Y1:N) effectuée précédemment. Pour simplifier le calcul de l’espérance, nous appliquons le lemme d’inversion matricielle7 à l’expression de la variance.
Améliorations et Méthodes de diagnostic de convergence
Méthodes graphiques
Le graphique des chaînes représente dans ce cas un indicateur de l'homogénéité de la distribution a posteriori. Ainsi, ce graphique donne une indication sur la taille de la chaîne (différence entre minimum et maximum), une plage des valeurs les plus significatives (entre le premier et le troisième quartiles), ainsi qu'une valeur typique (la médiane).
Critères quantitatifs
- Comparaison des variances inter et intra-chaînes
- Variabilité par rapport à la moyenne
La surface est donc un indicateur de la « durée » de la période de rodage. Plus la chaîne se mélange, plus le graphique est bruité et se concentre autour de zéro.
Prise en compte de contrainte de positivité sur les paramètres
Simulation d'une variable normale à support positif Plusieurs algorithmes existent (voir Mazet et al [45] comme exemple) pour la simulation d'une variable gaussienne scalaire tronquée. Simuler
Performances et robustesse de la méthode
En fonction de la connaissance des inconnues
Le principe de la méthode consiste à appliquer un algorithme de Gibbs alternativement à chacune des composantes du vecteur à simuler.
En fonction de la connaissance a priori du problème
FIGURE 6.11 : Diagramme de cas des distributions a posteriori pour différents écarts-types des distributions a priori, les écarts-types sont obtenus en multipliant l'espérance a priori par 0,5, 0,25 respectivement et les écarts-types sont obtenus en multipliant l'espérance a priori par 0,5, 0,25 et 0,2 respectivement. Les box-plot des distributions a posteriori de la figure 6.12 montrent une très nette amélioration des paramètres lorsque les variances du bruit sont faibles, tant au niveau de l'espérance (médiane autour de la valeur de référence) qu'au niveau de la précision (décroissante ) gamme interquartile).
Application aux données CLIM2000 et interprétation
Les données CLIM2000
FIGURE 6.12 : Quartiles de distributions a posteriori des paramètres en fonction des variances d'état et du bruit de mesure, les matrices de variance de référence sont multipliées respectivement par 0,1, 0,5 et 1. Rappelons que le bâtiment modélisé est constitué de cinq zones thermiques, qui sont soumises aux même température de consigne (intermittent 19/20°C) et même type de système de chauffage, une des zones représente la saturation de la puissance de chauffage (courbe violette sur la Figure 6.13).
Présentation des résultats et interprétation
Cependant, comme le montre la séquence de données d'entrée présentée dans la figure 6.13, la température extérieure ne change que dans la plage de 4 °C et assez lentement pendant la période d'observation (3 jours), ce qui est atypique pour la période de chauffage. Quant à la température intérieure, ses évolutions sont déterminées par la température réglée, qui elle-même ne change que de 1 °C.
Comparaison avec l’estimation classique
L'analyse des conséquences d'une telle configuration du bâtiment sur la précision des paramètres du modèle, avec un retour aux résultats d'estimation du chapitre 4, fera l'objet de la suite de cette section. En fait, c’est cette indétermination qui, combinée au fait que les paramètres agissent sur les équations dynamiques par produit, explique la mauvaise qualité de précision de l’estimation des paramètres, telle que présentée au chapitre 4.
Données réelles : bâtiment LGEP1
Analyse des données et résultats
Les données présentées dans la Figure 6.16 sont échantillonnées à un intervalle de temps de 10 minutes, et la météo est enregistrée au même endroit au niveau d'une cellule d'essai (ETNA) destinée à l'expérimentation de nouveaux composants du bâtiment et à la validation des logiciels de modélisation. L'intervalle de mesure météorologique est d'une minute, et les données sont ensuite suréchantillonnées à intervalles de 10 minutes.
Interprétation des résultats et limites
Il n'y a pas d'amélioration significative des distributions a posteriori des paramètres par rapport aux distributions antérieures, les histogrammes étant relatifs aux deux distributions, comme les sept paramètres sont représentés sur la figure 6.17. On peut donc s'interroger à ce stade sur la richesse des contraintes, mais la simulation de la température interne du bâtiment, illustrée sur la figure 6.18, le montre, contrairement au cas LGEP1.
Prise en compte de la saturation
Impact de la saturation pour un PI et précautions
- Conséquences sur le comportement du bâtiment
- Anti windup (« anti-emballement »)
- Ralentissement du régime transitoire du bâtiment
En revanche, un gain très élevé (1 par exemple) inverse la dynamique de l'action intégrale (esat dominant par rapport à e) entraînant une baisse de la température interne et de la puissance de chauffe. La figure 6.24 illustre la différence entre les temps de réponse des bâtiments avec et sans saturation de la puissance de chauffage.
Prise en compte d’une courbe de charge saturée dans l’algorithme de
- Courbe de charge considérée comme sollicitation du bâtiment 103
Pour cela, nous avons étudié l'influence de la saturation sur le comportement thermique des bâtiments. L'idée de base de cette méthode est l'interprétation de la loi a posteriori, dérivée de l'approche bayésienne, en tant qu'exposant de l'énergie potentielle du système physique.
Analyse des données d’entrée
FIGURE.4 : Reconstruction de la température de consigne (rouge) à partir de la température intérieure (bleu) sur une période de 2 jours En intérieur (bleu) sur une période de 2 jours. Deux types de filtrage ont été proposés pour soustraire cette composante de la courbe de charge de chauffage.
Identification et résultats
Schéma bloc associé au modèle global du bâtiment : entrées (vert), mesures (noir)
Zones climatique définies par la Réglementation Thermique de 2005 (RT2005)
Les différentes composantes du flux solaire, d’après Mazria [46]
Températures intérieures (maison instrumentée par EDF) : a) chambre à coucher,
Modèle électrique équivalent du bâtiment - modèle R3C2
Illustration de la régulation avec PI classique
Courbe de signature énergétique en fonction de la température extérieure
Courbe de signature énergétique en degrés jours
Modes de transfert thermique
Identification pour le diagnostic
Identification pour la commande
Schéma électrique équivalent R3C2
Procédure d’identification
Écriture en fonction de transfert
Complexité des structures
Modèle pour l’identification
SBPA (largeur des créneaux aléatoire)
Système en boucle fermée
Modèle en boucle fermée
Étapes de l’identification
Structure appropriée aux méthodes d’identification en boucle fermée
Système global « batiment + régulateur » ayant comme entrées : la température ex-
Modèle du bâtiment en boucle fermée, les températures de consigne E et extérieure
Schéma électrique équivalent R3C2
Sensibilité Q ch par rapport à une variation de chacun des paramètres
Données CLIM 2000 pour les 5 zones
Données du bâtiment considéré comme une zone thermique unique
Densité Spectrale de Puissance des différents signaux
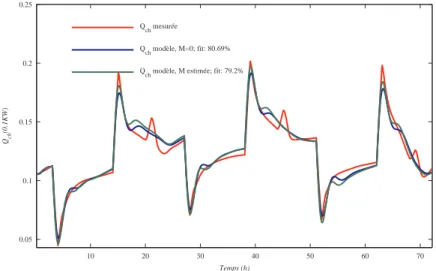
Courbes de charges réelle et générée par le modèle identifié
Distribution de l’erreur de prédiction
Autocorrélation des résidus et leur intercorrélation avec T ext
Schéma général d’inversion
Schéma problème inverse pour le bâtiment
Schéma R3C2 pour le bâtiment
Observations générées à partir de l’état caché
Données de synthèse : sollicitations, états et courbe de charge de chauffage associés
Simulation de la température intérieure
Simulations des paramètres du bâtiment (noir) et du régulateur (bleu) pour 3000
Simulations des paramètres (bleu), espérances des lois a priori (rouge) et valeurs
Exemple de simulation d’une chaîne de Markov par l’algorithme de Gibbs
Chaînes correspondant à des initialisations différentes de l’algorithme de gibbs,
Exemple de tracé sous forme de box-plot des simulations des sept paramètres
Variogrammes associés à un jeu de simulation des sept paramètres du modèle glo-
Histogrammes correspondant aux distributions a priori (magenta) et a posteriori
Box-plot des lois a posteriori pour différents écart types des distributions a priori,
Quartiles des distributions a posteriori des paramètres en fonction des variances des
Histogrammes des distributions a priori (violet) et a posteriori (vert) du gain sta-
Données recueillies au bâtiment LGEP1
Histogrammes des distributions a posteriori des paramètres du modèle du bâtiment
Simulations de la température intérieure T int s du bâtiment LGEP1, température moyenne
Température intérieure d’un bureau appartenant au bâtiment LGEP1, pour une pé-
Saturation de la commande chauffage
Effet de la saturation sur le comportement du système en boucle fermée
Schéma bloc de la boucle fermée avec anti windup
Températures et puissance de chauffage en fonction du gain K s
Régime transitoire avec/sans saturation
Comparaison du taux d’acceptation en fonction du pas de discrétisation
Exemple de trajectoires hamiltoniennes
Rez-de-chaussée
Étage
Données brutes collectées à partir du bâtiment de bureaux LGEP1
Reconstruction de la température de consigne (rouge) à partir de la température
Reconstruction de la consigne pour tout le mois
Filtrage de la courbe de charge chauffage pour une durée de 16 heures
Courbe de charge brute (bleu) et filtrée (rouge)
Structure d’identification pour le modèle de la signature énergétique
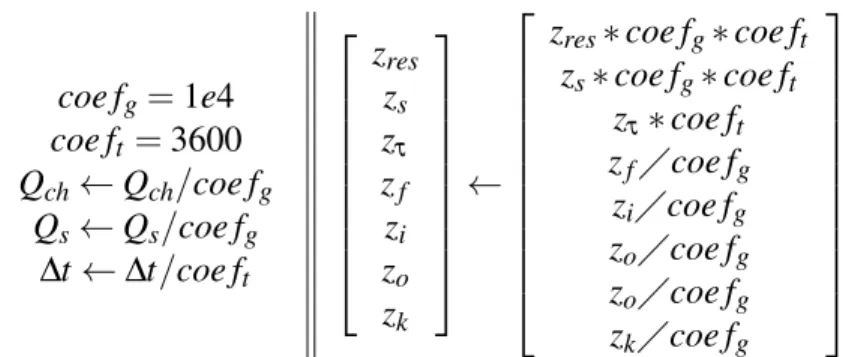
Changement de variable du modèle global
Résultat d’identification des paramètres avec modèle de bruit estimé
Changement d’échelle des données et des variables
Polynômes et paramètres du modèle identifié