Le chapitre 1, Problèmes d'équilibrage par numérisation 3D, présente les problèmes associés à l'équilibrage des vilebrequins basés sur la mesure de géométrie discrète. Ces valeurs d'erreur constituent une référence pour la sélection des systèmes de numérisation admissibles au regard de l'équilibrage.
Problématique de l’équilibrage par numérisation 3D
Problèmes industriel et scientifique
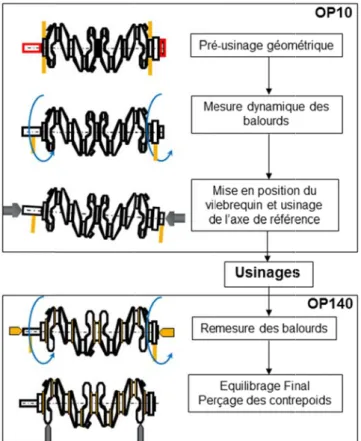
- Procédure actuelle d’équilibrage de vilebrequins
- Procédure d’équilibrage de vilebrequins par numérisation 3D
- Numérisation 3D et caractéristiques des données acquises
- Calcul des éléments d’inertie sur données discrètes
Synthèse et démarche pour la résolution de la problématique
L'acquisition de forme peut être réalisée à l'aide de systèmes de balayage optique pour obtenir une représentation numérique de la peau sous forme de données discrètes. A partir de travaux proches de la littérature, nous proposons une méthode de calcul des éléments d'inertie sur des données discrètes basée sur une représentation sous forme de carte voxel des données.
Calcul d’inertie sur données discrètes
Introduction
Il est donc nécessaire de développer une méthode générique de calcul de la matrice d'inertie de la pièce, nécessaire au calcul des balourds, basée sur des données discrètes numérisées. Cette représentation appelée voxel map, construite à partir d'une première représentation sous forme de maillage STL de la pièce, définit ainsi une pseudo-continuité du volume inclus dans le maillage surfacique.
Equilibrage et calcul d’inertie sur données continues
- Notions d’équilibrage
- Détermination des vecteurs-balourd
Cette dernière partie conduit à la définition des erreurs de numérisation tolérables qui assurent le calcul des éléments d'inertie. Lorsque le vilebrequin est équilibré dynamiquement, l’axe de rotation est l’axe principal d’inertie, donc les produits d’inertie sont nuls.

Algorithme de calcul d’inertie basé sur une voxelmap
- Construction de la voxelmap et calcul des éléments d’inertie
- Etude de cas
Through Skin Only : Les données collectées correspondant à la mesure de la surface externe de la pièce. De plus, la modélisation du volume de la pièce par voxels peut évoluer en fonction de la taille des voxels.
![Figure 17 : Représentation d’une tranche de la structure de voxélisation [PAT 05].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/467125.71699/46.892.279.617.704.1014/figure-17-représentation-tranche-structure-voxélisation-pat-05.webp)
Optimisation des paramètres
- Influence du maillage et de la voxélisation
- Choix des paramètres optimaux
En réduisant la taille de la flèche cinq fois et pour une taille de voxel donnée, disons 3 mm, l'erreur dans l'estimation de la masse est réduite de moitié. Il apparaît donc que l’influence du maillage et de la voxélisation sur les résultats reste significative. La masse est un bon indicateur de la qualité du rendu volumique par la voxel map.
Cependant, nous nous intéressons également à l’erreur de détermination de la masse et au temps de calcul.

Étude de sensibilité de l’algorithme aux défauts de numérisation
De plus, les trous autour de l'axe de rotation génèrent moins d'erreurs que ceux proches de l'axe du vilebrequin, ce qui est cohérent avec la formulation du calcul de l'élément d'inertie. En effet, la valeur du balourd augmente avec le double de la distance entre la masse ponctuelle analysée par rapport à l'axe de rotation du vilebrequin. De ce fait, les erreurs d'estimation des éléments inertiels provoquées par les trous dans les manetons sont plus importantes que celles provoquées par les trous situés autour de l'axe de rotation du vilebrequin.
L'étude réalisée sur les trous de scan permet de conclure que la typologie (position et superficie) des trous issus habituellement du scan 3D est la même.

Conclusions
Avec le système Kreon, chaque angle de numérisation nécessite que la MMT se déplace dans la direction Y. Le chemin de numérisation peut être défini comme un ensemble ordonné de points de vue qui garantissent que la pièce est numérisée sans collision. La qualité de la numérisation dépend du système de numérisation ainsi que de la stratégie de numérisation.
Les paramètres d'entrée de l'algorithme sont le modèle CAO de la pièce (incluant la dimension du maillage correspondant à la taille du plus petit détail souhaité) et les caractéristiques de chacun des capteurs (angle de vue, angle de vue autorisé, dimensions de la vue optimale). fenêtre, distance de balayage optimale, dimensions du capteur).
Evaluation des systèmes de numérisation pour l’opération d’équilibrage
Caractéristiques des systèmes de numérisation 3D retenus
- Description des systèmes
- Configuration des systèmes de numérisation
Evaluation des systèmes de numérisation
- Indicateurs de qualité selon le protocole QUALIPSO
- Indicateurs spécifiques à la complexité géométrique
- Synthèse sur l’évaluation des systèmes de numérisation
Cependant, dans le cas d'un équilibrage par mesure sans contact de la géométrie extérieure, la pièce à équilibrer sera connue. L'exigence en termes de densité surfacique est largement dépassée par tous les systèmes de numérisation.

Conclusions
La planification de la trajectoire consiste à définir les points de vue qui permettent la numérisation de la surface selon les critères donnés. Ceci, issu de la théorie des graphes, est basé sur le calcul des distances entre les points de vue. Cela génère, avec un effort de calcul réduit, une liste avec un nombre réduit de points de vue qui permettent la numérisation de la surface de la pièce.
L'un des avantages de la méthode Voxel2Scan est de fournir un ensemble réduit d'angles permettant de numériser l'œuvre.
Elaboration d’une stratégie de numérisation
Notion de point de vue capteur
Il s'agit notamment de déterminer quelles parties de la surface sont vues par un point de vue capteur, ou plus généralement quel point de vue permet de numériser un point ou une partie de la surface (visibilité partielle). Des travaux antérieurs [PRI 99, MEH 06, AUD 12] ont montré que pour garantir une bonne qualité de scan, le plan laser doit être perpendiculaire à la surface de la pièce. Sur la figure 46, le laser projeté par le capteur (en bleu) atteint la surface de la pièce, mais la caméra CCD ne voit pas l'intersection du laser avec la surface.
En effet, le capteur doit suivre la géométrie de la pièce pour que la surface à scanner appartienne à la fenêtre de mesure.

Méthodes de planification de trajectoires de numérisation
- Recherche des points de vue
- Détermination des points de vue avec prise en compte de la qualité
- Synthèse sur les méthodes de détermination des points de vue
Les auteurs proposent trois algorithmes différents pour déterminer un ensemble de placements de capteurs permettant une numérisation complète de l'œuvre. La planification de la trajectoire se déroule en 4 étapes : initialisation des données (extraction des données de CAO et voxélisation), calcul des points de vue, évaluation de l'incertitude des données obtenues et répartition des points de vue en fonction de la surface. Il s'agit simplement de la détermination d'un ensemble discret d'angles qui sont utilisés pour définir les positions optimales de la pièce par rapport au capteur.
L'objet est modélisé par des points d'échantillonnage pour estimer la visibilité globale de la surface.
![Figure 48 : Trajectoire (à gauche) associée à une section de la pièce (à droite) [XI 99]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/467125.71699/94.892.171.740.575.826/figure-trajectoire-gauche-associée-section-pièce-droite-xi.webp)
Détermination des points de vue à partir d’une voxelmap : Voxel2scan
- Principe de la méthode
- Définitions
- Description de la méthode Voxel2scan
L'analyse de visibilité du composant est réalisée à partir de cette représentation par voxels. L'orientation de la normale est évidemment sensible au nombre de facettes du voxel. Cette analyse est réalisée à travers l’analyse de la cohérence de la normale, comme décrit dans la section suivante.
Les voxels non vus par cette première direction de regard sont analysés en tenant compte des nouveaux points de vue après analyse de la qualité des voxels.

Applications
Puis, dans une seconde partie, la validation de la méthode Voxel2inertia est effectuée sur les résultats du scan précédent. Les maillages calculés à partir des résultats de la digitalisation d'un vilebrequin F9 sont présentés sur la Figure 74. Les résultats mettent en évidence une différence significative dans la détermination du balourd pour le système Kreon (Tableau 19) par rapport à la méthode classique.
Le système de numérisation de Kreon se compose d'un capteur Zephyr KZ25 monté sur une machine de mesure tridimensionnelle (MMT).

Application Industrielle
Validation de la méthode Voxel2scan
- Mise en œuvre des essais de numérisation avec le système GOM
- Mise en œuvre des essais de numérisation avec le système Kreon
- Synthèse sur la mise en œuvre des systèmes
- Résultats de numérisation
Les nuages de points obtenus pour chaque trajectoire sont inscrits dans le même référentiel selon la méthode de calibration du constructeur. A la fin du balayage du vilebrequin, deux nuages de points sont obtenus, un pour chaque moitié du vilebrequin (partie supérieure et partie inférieure). Cela est dû aux artefacts d'enregistrement (sphères pour les scans avec Kreon et cylindres avec cibles de positionnement pour les scans avec Gom) attachés aux vilebrequins, qui permettent d'enregistrer les nuages de points.
Ainsi, les résultats précédents mettent en évidence l’efficacité de l’algorithme Voxel2scan pour définir des points de vue, assurant la numérisation de pièces avec un nombre limité de points de vue.

Validation de la méthode Voxel2inertia
- Post-traitements des nuages de points pour le calcul des éléments d’inertie
- Calcul des balourds sur donnés numérisées
Dans le paragraphe suivant, nous présentons la validation de la méthode Voxel2inertia pour calculer le déséquilibre sur des données discrètes. Avant de procéder au calcul des éléments d'inertie sur les données numérisées, quelques post-traitements des nuages de points sont nécessaires. Le premier post-traitement pour le calcul des éléments inertiels consiste en l'enregistrement des données numérisées pour qu'elles soient exprimées dans le même référentiel.
Dans le Tableau 18 nous présentons les résultats du calcul de balourd avec l'algorithme Voxel2inertia pour les 7 vilebrequins.

Synthèse sur les systèmes de numérisation
Il est donc nécessaire d'optimiser l'utilisation de la stratégie de scanning de Voxel2scan pour atteindre un temps de scanning conforme au temps de cycle actuel. Cette dernière a un impact non négligeable sur le temps de scan et parfois sur les erreurs de recalage. Le temps de scan d'un vilebrequin avec le système Gom est d'environ 16 minutes, et celui d'un vilebrequin avec le système Kreon est d'environ 90 minutes.
Ces temps de scan sont très élevés par rapport au temps de cycle de 42 secondes imposé par la chaîne de production.
Conclusion
Un système de mouvement suffisant peut être mis en place avec la méthode Voxel2scan pour réduire le temps de mesure. Nous avons validé les algorithmes Voxel2scan et Voxel2inertia en utilisant la numérisation de 3 typologies de vilebrequins (M9T, F9 et R9M) avec deux systèmes différents (Gom et Kreon). Contri, Qualité géométrique de la mesure de surfaces complexes par voie optique, Thèse de doctorat, Ecole Normale Supérieure de Cachan, 28 novembre 2002.
Lartigue, Détermination de la qualité du balayage d'équilibrage du vilebrequin, 13e Conférence nationale AIP PRIMECA, mars 2012.
Capteurs de numérisation 3D
- Système de numérisation Kreon Zephyr KZ25
- Système de numérisation Gom Atos III
A partir de la géométrie du système de mesure, de la position et de l'orientation de l'émetteur et du ou des détecteurs, les coordonnées du point mesuré sont calculées avec les équations suivantes. Le système de mouvement, constitué de la MMT et de la tête PH10, possède ainsi 5 degrés de liberté. Le deuxième détecteur permet de compenser les changements des propriétés optiques de la surface mesurée et d'améliorer la qualité de la mesure [CHA 04a].
L'analyse de ces niveaux de gris combinée à la triangulation (en chaque point mesuré) permet de dériver les coordonnées des points de la surface.
![Figure 79 : Capteur Kreon avec fenêtre de mesure (à gauche) et la MMT sur laquelle il est monté [MEH 06b]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/467125.71699/164.892.263.623.428.622/figure-capteur-kreon-fenêtre-mesure-gauche-mmt-monté.webp)


![Figure 13 : Modélisation d’objets 3D pour le calcul approché d’éléments d’inertie [LIC 03]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/467125.71699/34.892.161.741.687.902/figure-modélisation-objets-calcul-approché-éléments-inertie-lic.webp)

![Figure 19 : Identification des voxels de surface et définition de la voxelisation finale sur une sphère [SUB 06]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/467125.71699/49.892.162.730.114.299/figure-identification-voxels-surface-définition-voxelisation-finale-sphère.webp)

