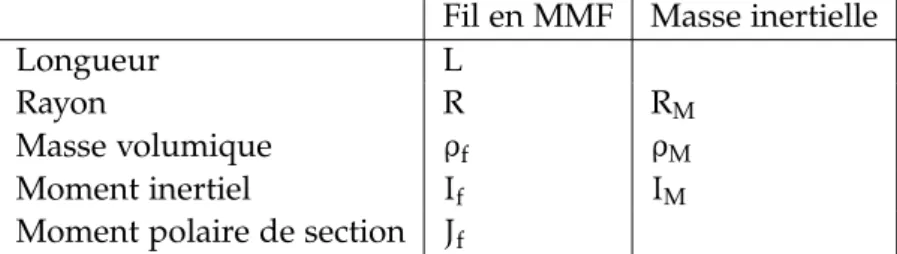
Les oscillations isothermes et non isothermes ainsi que l'asymétrie tension-compression de la force de rappel sont prises en compte. XA Déplacement local de l'austénite XM Déplacement local de la martensite Xori Déplacement dû à l'orientation X Déplacement total.
À propos des matériaux à mémoire de forme
La transformation martensitique
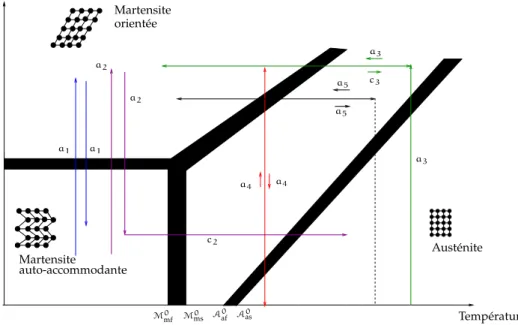
C'est l'interface entre la phase mère et la phase martensitique à travers laquelle se produit le cisaillement lors de la transformation. De même, si le matériau n'est pas chauffé à une température A0as supérieure à T0, la transformation inverse (martensite en austénite) n'a pas lieu.
Comportements
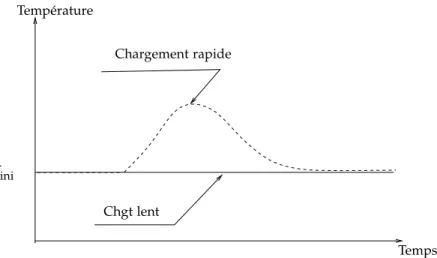
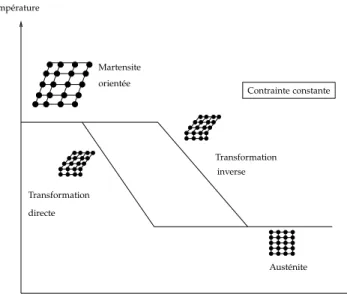
Figure 2.6 : Température en fonction de la déformation dans un essai visant à démontrer le comportement de l'effet mémoire bidirectionnel. Figure 2.7 : Température en fonction de la déformation dans un test démontrant le comportement superthermique des MMF.
Types et fabrication des MMF
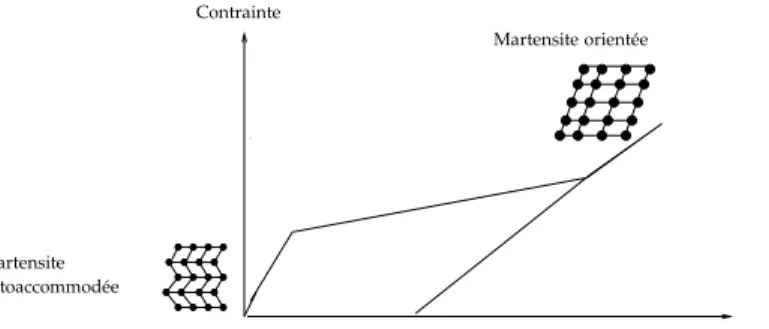
D'autres modèles de comportement pseudoélastique, comme celui de Duvalet et al., [34], utilisent des approches de gradient pour la modélisation non locale de la transformation martensitique. Figure 2.9 : Diagramme de phases : contrainte en fonction de la température et variations de comportement pseudoélastique avec vitesse de déformation absente de ces modèles : plus la vitesse de déformation augmente, plus la température du matériau augmente, générant ainsi une augmentation de la pente du plateau de transformation et changement de l'aire de la boucle d'hystérésis.
Applications
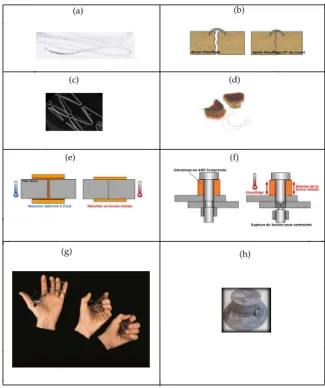
Les comportements des MMF dans ces applications sont respectivement l'effet de mémoire de forme unilatéral (clips) et la pseudo-élasticité (fils guides, « stents » et appareils dentaires). Figure 2.11 : Applications du MMF : (a) Bloc minéral divisé en deux parties par MMF (b) Système antisismique dans MMF (http://www.smaterial.com/SMA/link/link.html).
Etat de l’art sur la dynamique
- Introduction
- Couplage thermomécanique
- Aspect de calcul de structure
- Conclusion
Cependant, l'existence d'une viscosité dans le comportement des MMF est reconnue dans les travaux de Helm et Haupt [57]. En effet, lorsque la température du matériau est constante durant l’expérience, l’effet de la vitesse de déformation est négligeable.
Essais thermomécaniques
Objectifs
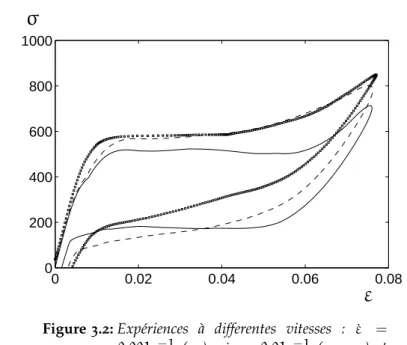
Le but de ces premières expériences est d'étudier l'effet de la vitesse de chargement sur le comportement pseudo-élastique du matériau à mémoire de forme. Les tests réalisés permettent de reproduire les effets de la variation de température du matériau.
Résultats et interprétations
De plus, la zone de la boucle reliée à une force de dissipation d'énergie, sa variation affecte les caractéristiques d'amortissement des forces dynamiques. La vitesse de déformation affecte la stabilisation de la contrainte résiduelle et la surface de la boucle d'hystérésis.
Modèle Zaki-Moumni isotherme
On pense que les liens internes sont parfaits et résultent donc d'un potentiel de liaison (Germain [92,93]). Dans le cadre des MSG (Generalized Standard Materials), la dissipation d'énergie est prise en compte par un pseudo-potentiel de dissipation D.
Prise en compte du couplage thermomécanique
Equations
Par conséquent, la vitesse de déformation de l’orientation est constante et nous n’avons pas besoin de résoudre la condition de charge pour l’orientation.
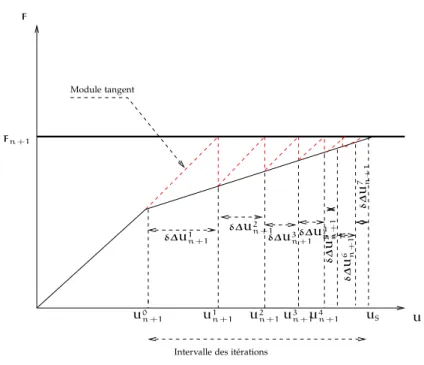
Algorithme de résolution
Déterminez la prédiction thermoélastique et évaluez les fonctions critères : (i=1,2), Fi,n+1z,(k)=Phys. Calculer l'incrément de fraction volumique ∆zk+1n+1 - Mettre à jour les variables d'état. Tableau 3.2 : Algorithme couplé du problème de bilan mécanique et thermique - Le problème thermique est résolu par un schéma numérique implicite d'Euler d'ordre 1. Le tableau 3.2 présente les principales étapes de l'algorithme de rétroaction radiale en présence de couplage thermomécanique. ǫcr, ǫeq et ǫch sont des tolérances d'équilibre mécanique, de critères métallurgiques et de température.
Simulations numériques
Les zones III correspondent à l'achèvement de la transformation, de sorte que le comportement redevient élastique : la température n'évolue pas à ces instants. La propriété endothermique de transformation inverse (absorption de chaleur) et la présence de couplage thermomécanique (∂T ∂z∂2L ) provoquent une diminution de température dans les zones IV. Cependant, le changement de température (∆T) est plus important sur la figure 3.9(a) car la vitesse est plus grande que sur la figure 3.9(b).
![Table 3.3: Paramètres matériaux identifiés dans Morin et al. [64]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462644.68622/51.892.104.676.201.423/table-3-paramètres-matériaux-identifiés-morin-al-64.webp)
Conclusion
Le modèle ZM tridimensionnel est d'abord réduit à un degré de liberté pour comparer les résultats avec ceux de la littérature. Des phénomènes typiquement non linéaires sont observés : comportement d'adoucissement (diminution de la fréquence de vibration avec l'amplitude), sauts et régimes chaotiques.
Modèle à un degré de liberté
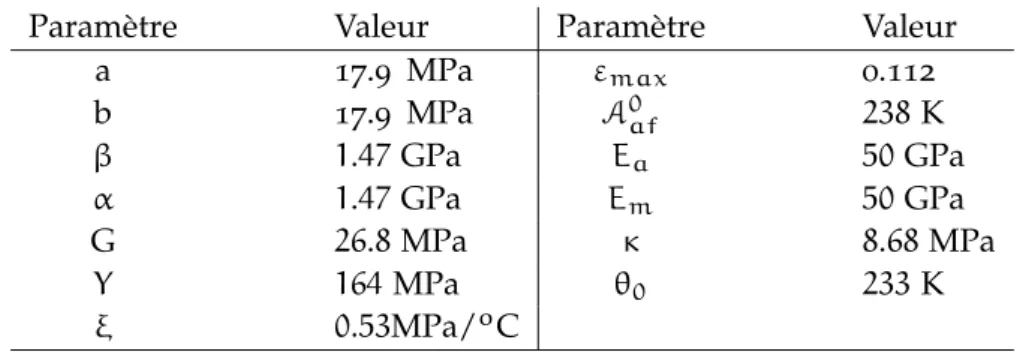
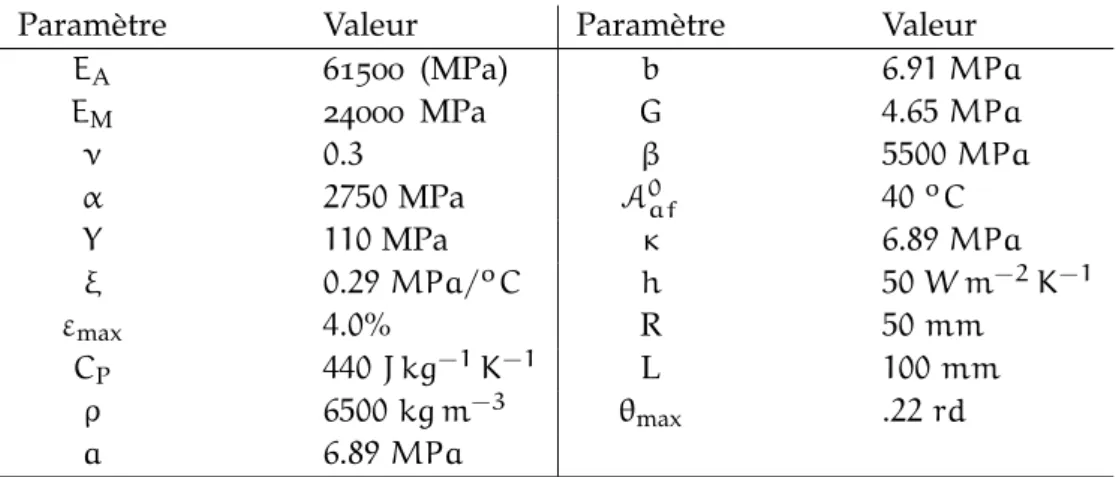
Identification des paramètres
Les indices m et a, avant s (commençant en anglais) et f (terminant en anglais), indiquent respectivement la transformation martensitique directe et la transformation inverse. Connaissant la section S, la longueur L, la contrainte σms au début de la transformation de phase directe, la déformation d'orientation εori et la température de référence Tref, la force Fm et le déplacement d'orientation sont respectivement évalués par Fms =σmsSet Xori=εoriL. Les paramètres du matériau ont été définis pour se rapprocher des quantités réelles observées dans les expériences [64], σms=800MPa, σsori=80MPa (déformation au début de l'orientation), σfori = 165MPa (déformation à la fin de l'orientation).
Adimensionnement des variables
La pulsation de l'appel est dimensionnée par rapport à la pulsation naturelle de l'oscillateur, c'est à dire Le déplacement de l'oscillateur est dimensionné par rapport à un déplacement intrinsèque Xms dès le début du changement de phase, soit L'amplitude du forçage harmonique est dimensionnée par rapport au seuil de force Fms au début du changement de phase, soit
Méthode numérique
Résultats
Réponses en fréquence à température constante
Les réponses en fréquence et la comparaison des résultats sont effectuées pour analyser la dynamique au voisinage de la fréquence propre normalisée. Le profil de phase et la transformée de Fourier du déplacement sont comparables à ceux rapportés par Lacarbonara et al. La loi 3D asymétrique est réduite à une dimension de la même manière qu'à la section 4.2.
Réponses non isothermes
Un changement de température du matériau affectera-t-il la dynamique du système. Les figures 4.12(a) et (b), respectivement, montrent les réponses en fréquence de la valeur moyenne de la température (θmy=N1 PN. L'effet de la température initiale semble en fait être significatif dans un comportement non isotherme.
L’énergie dissipée en fonction de la fréquence
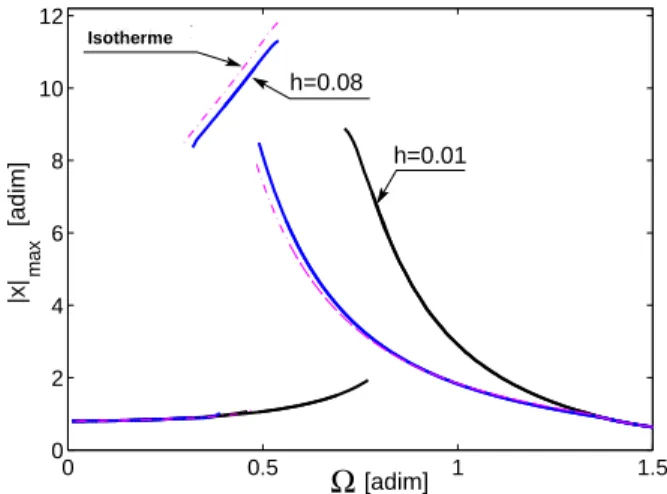
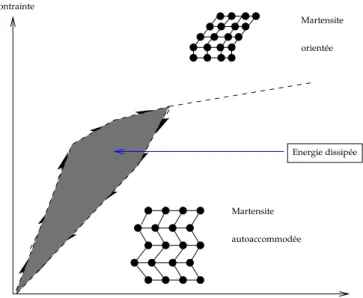
Figure 4.13 : Force de rappel non linéaire dans des conditions non isothermes (en raison de la symétrie, seule la partie positive est représentée). a) : effet de la température initiale sur le comportement mécanique (b) : comparaison entre un comportement non isotherme et un comportement isotherme (h=0,08). La figure 4.13(a) montre deux comportements mécaniques à deux températures initiales différentes : les seuils de transformation et la surface de boucle augmentent avec la température initiale. Figure 4.14 : Amplitude maximale de déplacement en fonction de la fréquence en présence de couplage thermomécanique.
Conclusion
Ce chapitre présente l'analyse de la torsion d'un fil dans un matériau à mémoire de forme, avec et sans prise en compte de l'inertie. L'étude de la torsion présente un certain nombre de difficultés par rapport à la traction ou à la compression. Bien qu'en pratique le problème dépende aussi de la coordonnée z, on se place dans un cas tel que cette dépendance peut être contrôlée : en projetant la dynamique de manière purement linéaire sur z et en supposant que la température est uniforme le long de l'axe. (onces).
Modélisation du comportement
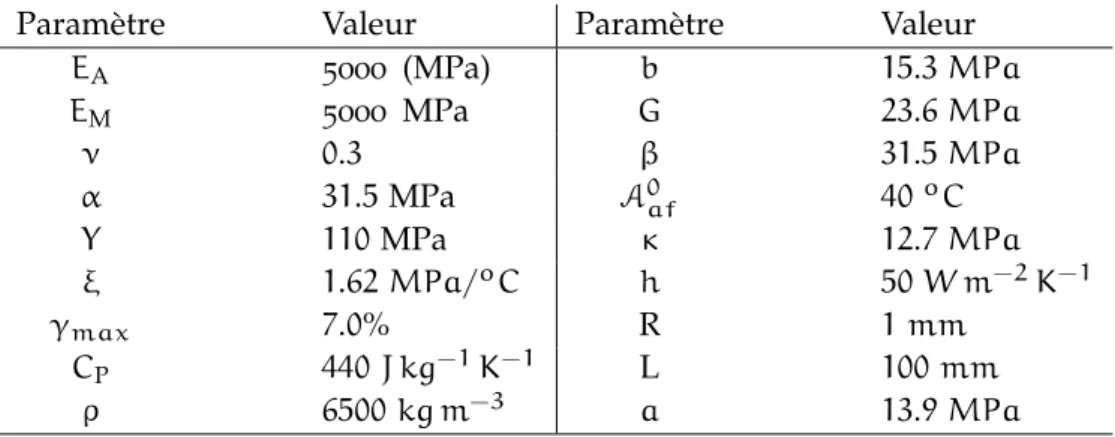
Equations physiques du problème de torsion
L'expression de la contrainte de cisaillement totale (εθz) en l'absence de distorsion de section est donnée par. La symétrie de ces tenseurs permet de simplifier la notation en introduisant la contrainte de cisaillement τ=σzθ=σθz et la contrainte de cisaillement γ=2εzθ=2εθz. Le comportement global est alors donné en intégrant le moment sur toute la section S.
Modélisation quasi statique
Figure 5.9 : (a) z en fonction du rayon de la section à chargements multiples (b) z en fonction du rayon de la section à décharges multiples. Figure 5.12 : Evolution de la température : (a) T en fonction du rayon de section lors de chargements multiples (b) T en fonction du rayon de section lors de déchargements multiples. Figure 5.13 : Evolution de la température : (a) T en fonction du temps d'irradiation = R (b) T, moyenné sur la section, en fonction de l'angle θ.
Modélisation dynamique
On obtient la multiplication de l'équation (5.51) par Φm et l'intégration sur toute la longueur du fil. La dépendance linéaire du premier mode par rapport à z permet de résoudre l'équation dynamique de torsion à z=L pour simplifier (équation (5.89)). L'équation de la chaleur donne la variation de température au temps tn+1 dans l'équation (5.99), par un schéma d'Euler implicite.
Expériences de torsion d’un MMF
Description de l´expérience
La seconde est réalisée en laissant la masse libre et en appliquant une commande harmonique (déplacement imposé) à l'ensemble du système. Le réglage des paramètres de contrôle des cartes d'acquisition est effectué par un système PID classique. La figure 5.16 (2) montre une image de la configuration déformée après un certain angle de torsion.

Résultats en quasi statique et comparaison avec le modèle107
Figure 5.18 : Réponse en fréquence du fil en torsion : Amplitude maximale de l'angle de torsion en fonction de la fréquence de tension. Le but de ces expériences est d'observer l'effet de l'inertie en présence d'un comportement pseudo-élastique (rigidité MMF). L'amplitude αc a le rôle de paramètre dans cette étude, qui permet de passer de la réponse d'un oscillateur harmonique linéaire (petites valeurs de αc) à une réponse en fréquence non linéaire due au comportement des MMF.
Analyse expérimentale du comportement cyclique
Recherche du cycle stabilisé
Le matériau accumule des contraintes internes cycle après cycle, favorisant la formation de martensite, stable à basse température ou à forte déformation (Moumniet al[104]). L'effet de la fréquence sur la boucle stabilisée est représenté sur la figure 5.21 : la pente du plateau augmente et la surface de la boucle change en raison du couplage thermomécanique que l'augmentation de la fréquence permet de générer l'effet. En effet, ces observations dynamiques peuvent être utilisées dans l'extension du critère de fatigue quasi-statique.
Recherche du point mémoire
La figure montre également l'effet du chargement cyclique (cf. Chapitre 3) sur les seuils de changement de phase : les instants seuils de transformation de phase directe diminuent lors du chargement cyclique. Malgré l'angle de rotation minimum imposé, on observe que les seuils de transformation inverse augmentent avec le nombre de boucles internes : l'austénite étant stable à faible déformation, la présence de déformation résiduelle à chaque cycle provoque un changement de phase de la martensite à une phase plus intensive en contraintes. austénite. La figure 5.23(b) montre l'évolution de la température en fonction du temps entre les boucles internes.

Conclusion
Influence of Model Parameters and Thermomechanical Coupling on the Behavior of Shape Memory Devices. Effect of strain rate on the debonding and superelastic behavior of NiTi shape memory alloys. Design of Intelligent Shape Memory Alloy Actuators ed k p chong, s c liu and j c li (amsterdam : Elsevier).




![Figure 4.4: (a) Déplacement [x] en fonction du temps τ pour γ = 0.5 et Ω = 0.8 (b) Transformée de Fourier du déplacement [x] (c) Vitesse [v] en fonction du déplacement [x] (Plan de phase) (d) Fraction volumique [z] en fonction du temps τ (e) Force de rappe](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462644.68622/68.892.119.631.207.506/déplacement-fonction-transformée-fourier-déplacement-déplacement-fraction-volumique.webp)

