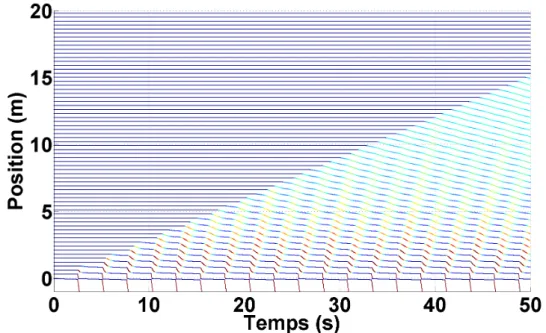
59 4.11 Coloration de l'espace/temps du piéton en fonction de la vitesse des participants. 60 4.12 Vitesses des participants. Dans le cadre de l’étude de cette expérience, nous avons développé une méthode de reconstruction de données, que nous présentons au chapitre 3.

Modèles macroscopiques
Modèles statistiques
Plusieurs modèles s'intéressent aux flux piétons liés à l'évacuation des bâtiments [MB75, PM69, Pau84], notamment le flux piéton que peuvent permettre les portes et les escaliers. De par leur nature même, ces modèles macroscopiques sont capables de simuler des foules de piétons à un coût de calcul très faible et d'intégrer facilement des observations du monde réel.
Modèles de flots
Elle repose sur deux hypothèses : le nombre total de piétons reste constant pendant la simulation et la loi de la vitesse est fonction de la densité. Leur modèle introduit l’idée de flux piétonniers à très forte densité, dans des situations exceptionnelles de type panique, là où le flux serait proche de zéro en situation normale.
Modèles microscopiques
- Automates cellulaires
- Modèles à base de règles
- Modèles à base de forces
- Modèles géométriques
- Modèles basés vision
- Modèles basés données
Matrice 3*3 de probabilité de la prochaine position d'un piéton [BKSZ01] (b) Décomposition de l'espace en une grille régulière à 2 dimensions [TLC02]. Dans le modèle de Shao et Terzopoulos [ST07], chaque piéton perçoit les obstacles en effectuant un lancer de rayons à l'intérieur d'un cône représentant son champ de vision.
![Figure 1.2 – Automates cellulaires. (a). Matrice 3*3 des probabilités de la prochaine position d’un piéton [BKSZ01] (b) Décomposition de l’espace en grille régulière à 2 dimensions [TLC02].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462657.68631/26.892.185.780.904.1064/automates-cellulaires-matrice-probabilités-prochaine-décomposition-régulière-dimensions.webp)
Suivi de piéton
Il utilise la variable optique τ, qui est l'inverse du taux d'expansion, pour définir le temps avant collision d'un conducteur. Avec les piétons qui se suivent, on constate que le temps précédant la collision est généralement beaucoup plus long.
Observations
Observations Naturelles
Observations Expérimentales
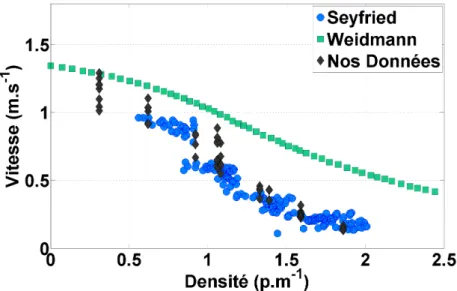
On peut observer une diminution de la décroissance de la vitesse allant vers une vitesse quasi constante en fin de domaine. Pour établir une relation entre leurs résultats unidimensionnels et le diagramme fondamental décrit dans un plan, ils introduisent un correcteur linéaire dépendant de la vitesse.

Conclusion
Situations étudiées
- Expérience anneau
- Expérience passage de porte
- Expérience front de piétons
- Expérience canon à piétons
- Expérience interaction 1-1
- Expérience cercle 1D
L'objectif principal de cette expérimentation est d'observer les conditions de formation des lignes piétonnes. Nous avons également réalisé des alimentations asynchrones, les fréquences d'entrée de chacun des trois ports augmentant également progressivement de 0,33 Hz à 1 Hz. L'objectif principal de cette expérimentation est d'observer des interactions uniformes entre piétons et d'étudier l'influence de la progression d'un piéton par rapport à un autre par rapport à leur intersection.
Déroulement des expériences
Moyens utilisés
Les trajectoires des sujets ont été mesurées à l'aide d'un système de capture de mouvement Vicon MX-40 à 12 caméras avec une fréquence d'enregistrement de 120 Hz. Lors de la première campagne d'observation, chaque sujet portait une chemise blanche et quatre marqueurs : un sur l'épaule gauche, un sur la tête et deux sur l'épaule droite. Lors de la deuxième campagne d'observation, chaque sujet portait une chemise noire et cinq marqueurs, un marqueur ayant été ajouté sur la tête pour connaître la direction du regard des sujets.
Expérience Cercle 1D
- Objectif
- Tâche
- Population
- Dispositif
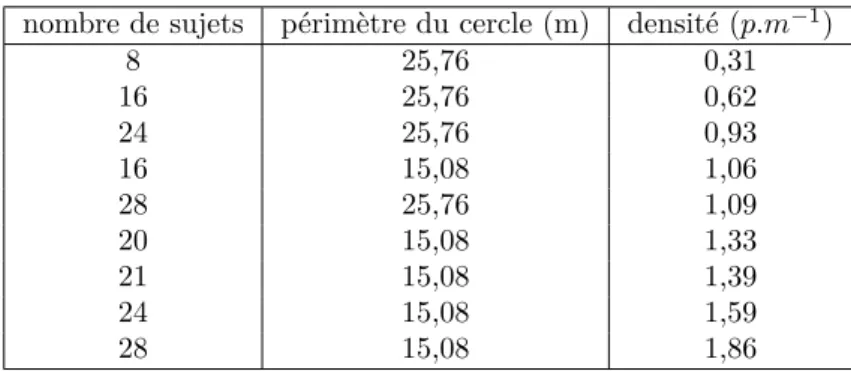
- Conditions expérimentales
- Programme expérimental
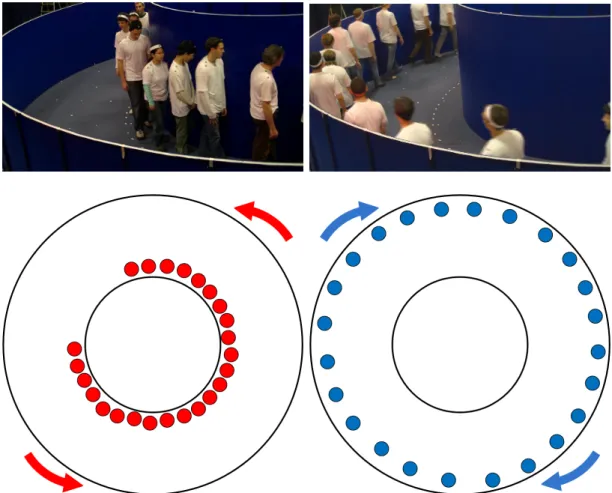
De plus, pour éviter un biais dû aux conditions initiales, nous en avons défini deux, soit en disposant les sujets uniformément le long du cercle, soit en les regroupant tous en laissant une zone vide. À gauche : 24 personnes marchent dans le sens inverse des aiguilles d'une montre le long du cercle intérieur et sont regroupées dans un premier temps. À droite : 24 personnes marchent dans le sens inverse des aiguilles d’une montre le long du cercle extérieur et sont initialement espacées de manière égale.
Discussion
Dans ce chapitre, nous cherchons à déterminer le mouvement global d'un participant à partir des données brutes obtenues par le système de capture de mouvement. Ces méthodes utilisent le squelette du corps à reconstruire pour déterminer la position d'un marqueur manquant en fonction de la position d'autres marqueurs. Au lieu de cela, nous essayons d'estimer la position globale de chaque participant à partir d'un ensemble réduit de marqueurs.

Méthode de reconstruction
Alignement des données par rapport au plan horizontal
Deuxièmement, nous n’avons pas l’intention d’interpoler directement la trajectoire de chaque marqueur ou d’extraire des trajectoires communes à partir d’un ensemble complet de marqueurs.
Identification des marqueurs
- Suppression des marqueurs fantômes
- Regroupement des marqueurs par participant
- Fusion des trajectoires d’un même participant
- Identification des marqueurs
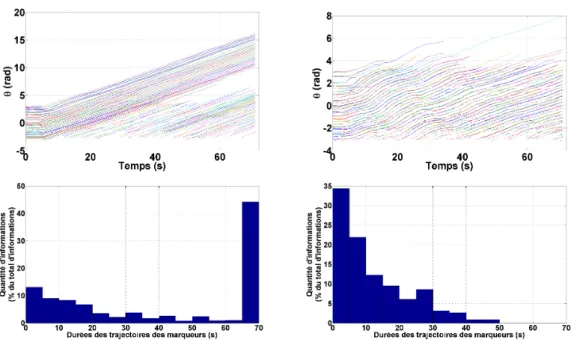
En bas : Répartition de la quantité d'informations par durée des trajectoires des marqueurs pour les mêmes enregistrements. A l'issue de cette étape, la trajectoire du participant est décrite comme celle d'un ensemble de trajectoires marqueurs. La trajectoire d'un participant peut donc être décrite comme une succession de groupes de trajectoires marqueurs.
Estimation de la position d’un participant
- Estimation du squelette d’un participant
- Hypothèses sur le mouvement du squelette
- Estimation de l’orientation du participant
- Résolution Numérique
- Interpolation avec l’aide des participants voisins
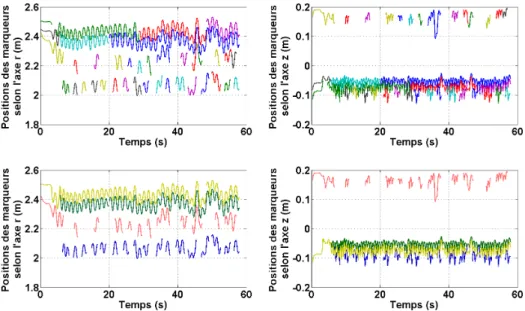
En haut : Positions des marqueurs non identifiés d'un participant selon r (gauche) et z (droite) en fonction du temps. Durant un intervalle de temps T donné, l'évolution de la position d'un participant peut être approximée par une fonction polynomiale. La figure 3.6 montre la position reconstruite d'un participant en fonction des positions de ses quatre marqueurs au fil du temps.
Résultats et Évaluation
Validation de l’estimation de la position du participant
- Comparaison des résultats quant aux positions moyennes
- Robustesse à la perte de marqueur
La méthode donne des résultats similaires à la moyenne des marqueurs pour les cas où tous les marqueurs sont entièrement suivis. Nous étudions ici la robustesse de la perte de marqueurs de la méthode d'estimation de position. Vingt répétitions de trois trajectoires sont effectuées pour calculer l'erreur moyenne de la méthode de reconstruction.
Évaluation globale de la méthode de reconstruction
Discussion et conclusion
- Filtrage des données cinématiques
- Étude des variables locales
- Étude des corrélations
- Observation d’un retard
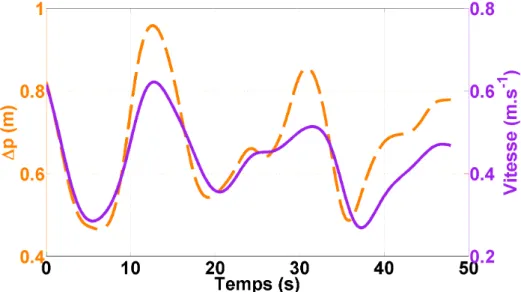
On peut donc supposer que lors d'une tâche de suivi, un modèle de locomotion contrôlant l'accélération en fonction de la vitesse relative a une justification réaliste. La préférence devrait être donnée à un modèle qui régule la vitesse en fonction de la distance ; cette hypothèse est plus faible mais reste raisonnable au regard des données. La figure 4.3 montre un nuage de points de l'accélérationa en fonction de la vitesse relative divisée par la distance (∆v/∆p) pour deux participants différents au cours du même enregistrement.
Analyse macroscopique
Diagramme fondamental
Visuellement, nous pouvons voir que la corrélation augmente à mesure que la vitesse relative évolue dans le temps. Nous suggérons que pour chaque participant, un délai soit calculé qui maximise la corrélation entre a et ∆v/∆p. Nous recalculons les corrélations croisées moyennes par densité et observons une amélioration significative de la corrélation entre a et ∆v/∆p, comme le montre la figure 4.7.
Vagues de vitesse
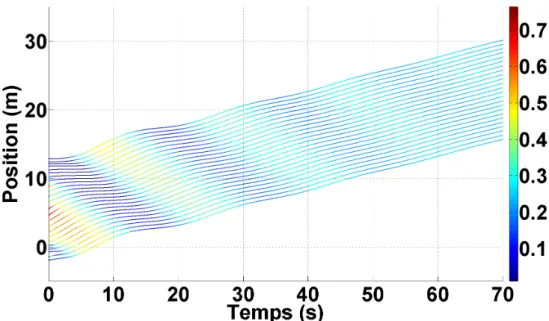
La vitesse d'un sujet au sein d'une onde évolue avec le temps pour se rapprocher de plus en plus de la vitesse moyenne de tous les sujets. L'augmentation de la vitesse au sein de la vague au fil du temps est pertinente pour mesurer l'amortissement des vagues. Dans la figure 4.11, l'espace piéton/temps est coloré en fonction de la vitesse des participants.
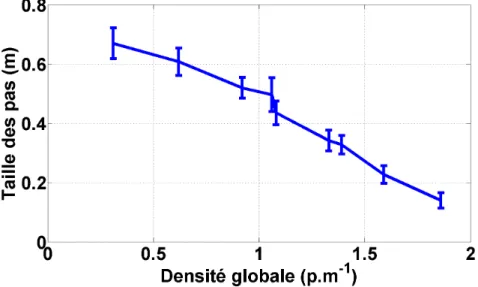
Étude des pas
Nous avons calculé le décalage (ou progression) de chaque étape pour chaque participant par rapport à l'étape du participant précédent. Ce retard est centré sur 0, ce qui peut indiquer une synchronisation graduée, mais la rareté des données révèle que la synchronisation graduée n'est pas un phénomène omniprésent. Nous avons également observé des différences de fréquences de pas entre les participants d’un même enregistrement, ce qui à la fois indique une non-synchronisation des pas, mais souligne également la difficulté d’étudier ce phénomène.
Discussion et Conclusion
Cette analyse fournit une base suffisante pour proposer un modèle de suivi et suggère le contrôle de l'accélération en fonction de la distance ∆p et de la vitesse relative ∆v, qui est l'hypothèse la plus importante. Sur la base des résultats de l'analyse microscopique, nous proposons un modèle de contrôle de l'accélération dépendant de la distance et de la vitesse relative. Nous justifions l'introduction d'un délai à partir de l'analyse microscopique (cf. 4.1.4), où l'on observe une amélioration de la corrélation à mesure que la vitesse relative se déplace dans le temps.
Calibrage
Calibrage microscopique
- Méthode
- Évaluation
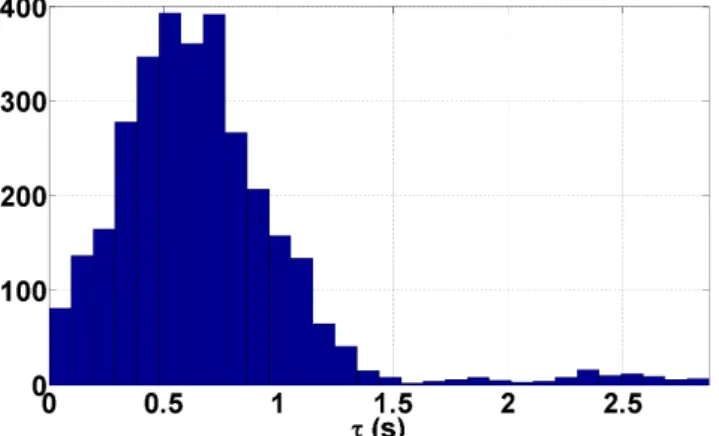
Domaine de validité des données On considère le piéton conforme au modèle (5.1) dans la fenêtre W si les conditions suivantes sont remplies : a) le retard τ∗ est positif et inférieur à 3 secondes. La figure 5.4 montre les résultats de simulation des conditions initiales de l'enregistrement n°25 (introduit dans la figure 4.9). Les trajectoires sont colorées en fonction de l'amplitude de la vitesse instantanée pour faciliter l'observation des ondes stop-and-go.
Calibrage macroscopique
- Méthode
- Évaluation
Concernant le schéma de base, la figure 5.5 montre la vitesse moyenne des piétons simulés par rapport à celle des sujets lors d'observations réelles et d'études antérieures. La figure 5.6 montre les résultats de simulation des conditions initiales pour l'enregistrement n°25, comme pour l'étalonnage microscopique. La propagation des ondes stop-&-go est également comparée et des résultats similaires sont obtenus.

Rôle des paramètres
Discussion
Comparaison avec le modèle de Reynolds
Dans cette section, nous évaluons notre modèle en le comparant avec des modèles de la littérature dans des conditions expérimentales. La figure 6.1 montre les résultats de simulation de ce modèle à partir des conditions initiales de l'enregistrement no. 25. Ce comportement est relativement prévisible en raison de la corrélation observée entre la vitesse et la distance présentée au chapitre 4.
Comparaison avec le modèle d’Helbing
La figure 6.3 montre les résultats de la simulation de ce modèle à partir des conditions initiales de l'enregistrement n°25. Si effectivement des ondes de vitesse sont créées, leur comportement ne correspond pas aux données expérimentales. Enfin, concernant le schéma de base, les vitesses moyennes des piétons simulés diffèrent de nos données réelles.
Comparaison avec le modèle des tangentes
En effet, les piétons simulés marchent soit à grande vitesse, soit à vitesse nulle. La règle qui évite les collisions entre piétons en mettant leur vitesse à 0 est trop souvent utilisée, le piéton virtuel ne réagit que trop tard avec ce modèle.
Applications
Scénario 1 : File d’attente en serpentin
- Description
- Résultats et Comparaison
La figure 6.8 montre les trajectoires des piétons virtuels sur les 20 premiers mètres simulées à partir du modèle que nous proposons. Les figures 6.9 et 6.11 montrent les trajectoires des piétons virtuels sur les 20 premiers mètres simulées respectivement à partir du modèle de Reynolds et du modèle Helbing. Le paramètre doff set du modèle Reynolds, calibré à une valeur de 0,45 m à partir de nos données, incite les piétons virtuels à être espacés de 0,45 m.

Scénario 2 : Flux unidirectionnel en couloir
- Description
- Résultats et comparaison
Si l'agent a plutôt tendance à se trouver à droite (respectivement à gauche) de l'agent qu'il suit, il tentera d'abord de le dépasser par la droite (respectivement à gauche). On suppose que l'agent ainsi déplacé aurait suffisamment d'espace pour rattraper l'agent qui le précède. Si l'agent a suffisamment de place pour dépasser d'un côté, sa vitesse latérale augmente progressivement dans cette direction en utilisant son accélération maximale amax = 1m.s−2.
Discussion et conclusion
Le pion rouge est éloigné du pion sur l'axe longitudinal. b) Le piéton jaune a suffisamment bougé pour laisser passer le piéton bleu : son centre est situé à une distance latérale supérieure à 2r. Le piéton bleu est plus à droite que le piéton rouge et la priorité est donnée aux dépassements par la droite. On déplace donc le pion bleu 2r à gauche du pion rouge virtuellement et latéralement pour étudier la possibilité de dépassement par la gauche. a).

Modèles de flots
Automates Cellulaires
Automates Cellulaires, Résolution d’un conflit de collision
Exemples de règles de comportement proposées par Reynolds
Simulations de modèles de forces
Modifications apportées au modèle d’Helbing
Adaptation de la vitesse en fonction d’un obstacle mobile dans des modèles
Modèles basés vision
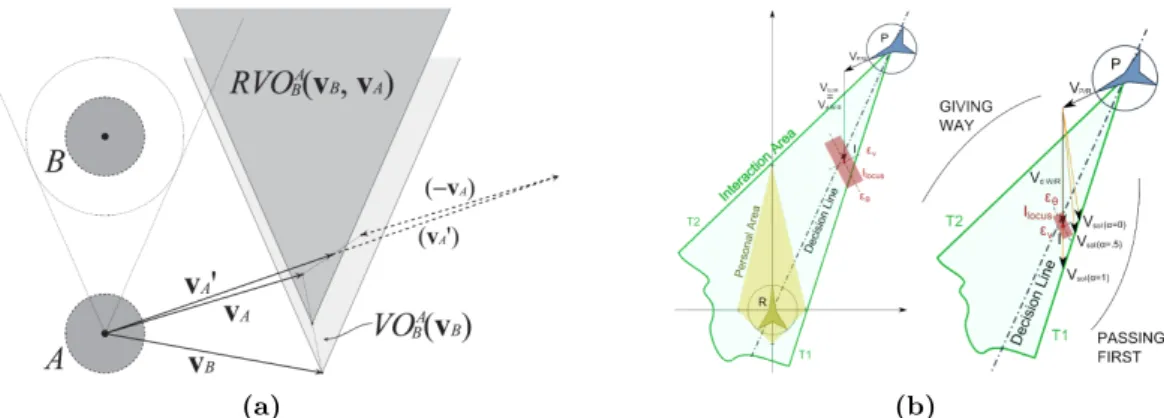
Processus de résolution d’une interaction dans [LCL07]
Conditions initiales de différentes expériences réalisées sur le cas du goulot
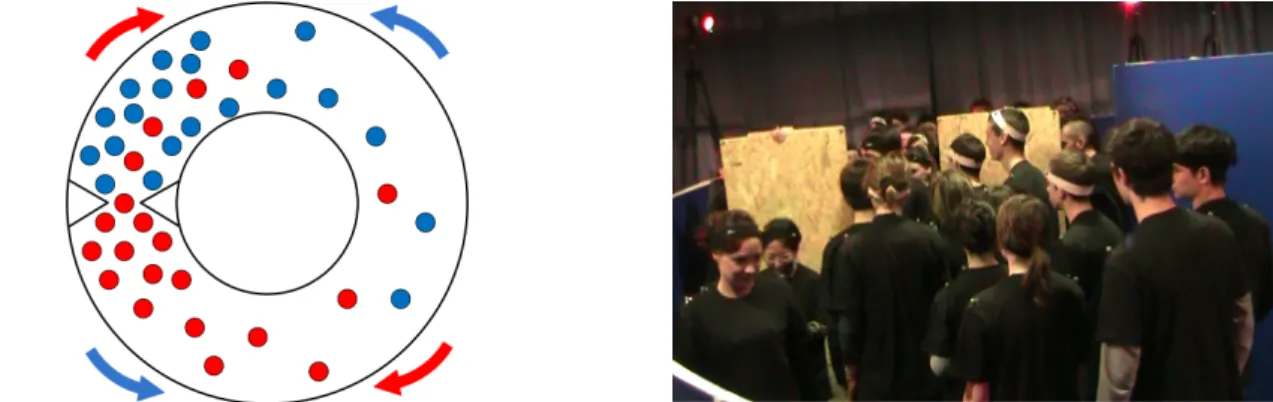
Photos d’expériences réalisées sur les foules de piétons
Schéma et photo de l’expérience anneau
Schéma et photo de l’expérience passage de porte
Schéma et photo de l’expérience front de piétons
Schéma et photo de l’expérience canon à piétons
Schéma et photo de l’expérience interaction 1-1
Dispositifs expérimentaux
Illustrations des conditions expérimentales : nombre de sujets, longueur du
Système de capture Vicon
Placement des marqueurs pour l’expérience cercle 1D
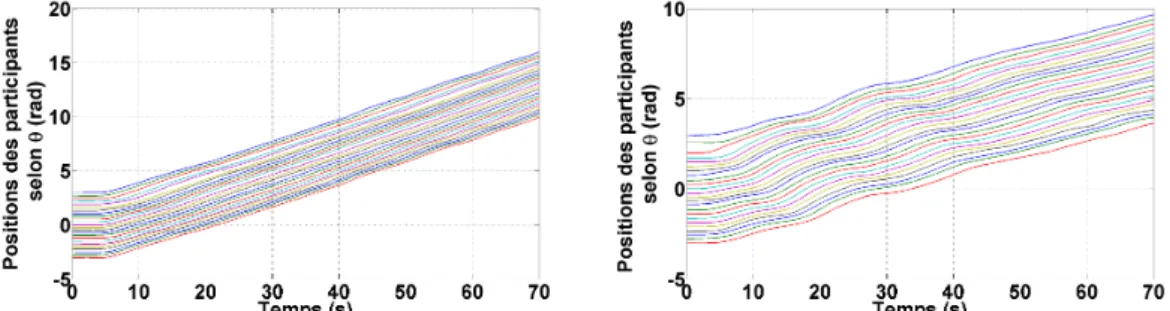
Positions des marqueurs selon θ en fonction du temps et répartition de la
Identification des marqueurs
Exemple de l’évaluation du squelette d’un participant en utilisant quatre
Position reconstruite en 3D d’un participant au cours du temps à partir de
Simulation lancée à partir du modèle de Reynolds
Diagramme Fondamental des simulations réalisées à partir du modèle de
Simulation lancée à partir du modèle d’Helbing
Diagramme Fondamental des simulations réalisées à partir du modèle d’Helbing 81
Vue du dessus de l’animation de la file d’attente en serpentin
Vue du départ de l’animation de la file d’attente en serpentin
Trajectoires des piétons virtuels sur les 20 premiers mètres d’un scénario de
Trajectoires des piétons virtuels sur les 20 premiers mètres d’un scénario de
Trajectoires des piétons virtuels sur les 20 premiers mètres d’un scénario de
Trajectoires des piétons virtuels sur les 20 premiers mètres d’un scénario de
Illustration de la règle de suivi de piéton
Illustration de la règle de dépassement
Propagation et amortissement de la vague de “stop-&-go” simulée par notre
Simulation du scénario couloir en utilisant le modèle d’Helbing
Simulation du scénario couloir en utilisant le modèle RVO
Simulation du scénario couloir en utilisant le modèle des tangentes

![Figure 3 – Classification des actions d’un agent virtuel proposée par Donikian [Don04]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462657.68631/20.892.248.715.205.613/figure-classification-actions-agent-virtuel-proposée-donikian-don04.webp)
![Figure 1.3 – Résolution d’un conflit de collision à travers l’approche statistique pré- pré-sentée dans [BKSZ01].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462657.68631/27.892.112.725.196.424/figure-résolution-conflit-collision-travers-approche-statistique-sentée.webp)
![Figure 1.4 – Exemples de règles de comportement proposées par Reynolds [Rey99]. (a) Alignement de flots](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462657.68631/27.892.119.731.789.950/figure-exemples-règles-comportement-proposées-reynolds-rey99-alignement.webp)