Pour proposer une réponse à ce problème, nous avons développé une nouvelle méthode d'inversion géoacoustique, la méthode source d'image, qui affiche le profil de vitesse de la stratification sédimentaire. L'ensemble de la méthode peut être sujet à des erreurs qui conduisent à des incertitudes sur le résultat de l'inversion.
![Tableau 1.1 – Classification de Wentworth [Wen22] pour les sédiments.](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466097.71001/19.892.224.629.538.941/tableau-1-1-classification-wentworth-wen22-sédiments.webp)
Géoacoustique
- Classification des sédiments
- Paramètres acoustiques des sédiments
- Géométrie du système sédimentaire
- Hypothèses utilisées dans cette thèse
Il est également possible que les interfaces soient effectivement parallèles entre elles, mais que la structure feuilletée soit inclinée par rapport à l'horizontale. En raison de la faible couverture horizontale de l’inversion, les limites géologiques sont considérées comme parfaitement parallèles.
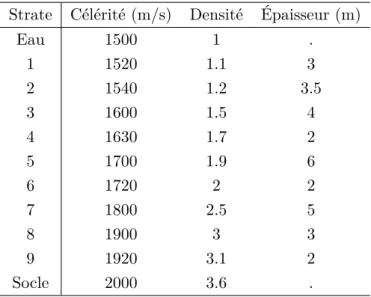
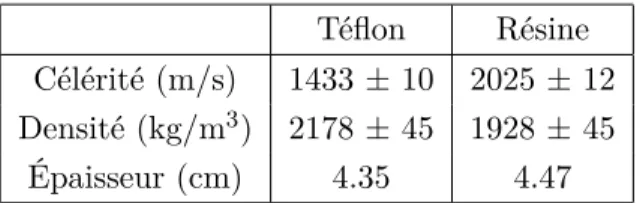
![Tableau 1.2 – Célérités et masses volumiques mesurées dans les sédiments [Rak09].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466097.71001/21.892.135.717.147.448/tableau-1-célérités-masses-volumiques-mesurées-sédiments-rak09.webp)
Méthodes inverses en géoacoustique
Généralités
Avec la détermination a priori de la taille dem, le problème inverse consiste à déterminer les valeurs de l'ensemble des paramètres m= [m1, m2,. Si le problème inverse est linéaire, il consiste à estimer les paramètres en trouvant l'opérateur inverse G−1 tel que
Familles de méthodes
Du fait du calcul de G(m) pour une grande variété de paramètres m, l'inversion par champ d'onde adapté présente l'avantage que les densités de probabilité des paramètres inversés peuvent être obtenues lorsqu'elles sont obtenues par la méthode bayésienne [Ger94, Kor10] . Sans faire une liste complète de toutes les méthodes d'inversion existantes, nous pouvons en citer quelques autres comme par ex.
Problèmes avec les méthodes inverses
Il est donc nécessaire d'utiliser des méthodes d'optimisation de type Monte Carlo telles que des algorithmes génétiques ou le recuit simulé [Ger94].
Méthodes sismiques
Cette analyse peut également être effectuée dans une figure où les signaux sont présentés en fonction du temps au carré et du décalage au carré (figure 1.5b). Les signaux tracés en fonction du temps et du déplacement sont ainsi transformés en un espace en fonction du temps et de la vitesse décalé de zéro par l'opération.
Méthode de Holland et Osler
Conclusion
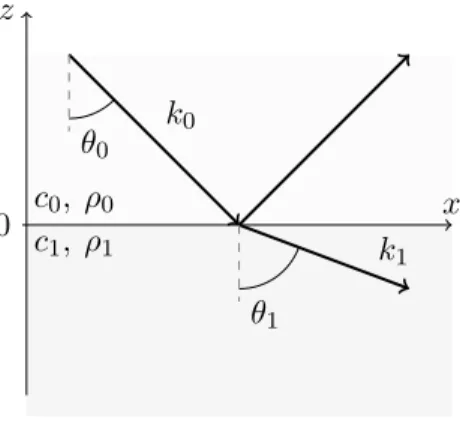
Cas de l’interface simple
De ces relations on déduit que le nombre d'onde horizontal kx0 = k0sinθ0 = kx1 est identique dans les deux environnements. Lors du calcul des coefficients de réflexion ou de transmission, les effets dissipatifs sont pris en compte en ajoutant une composante imaginaire à la vitesse ou au nombre d'onde.
Cas des interfaces multiples
Réflexion d’une onde sphérique sur un milieu stratifié : intégrale de Som-
27 2.3 Comparaison du coefficient de réflexion en ondes planes et en ondes sphériques 282.4 approximation de Born de l'intégrale de Sommerfeld en milieux stratifiés.
Comparaison du coefficient de réflexion en onde plane et en onde sphérique 28
- Exemple
- Contexte
- Hypothèses et conditions d’application
- Théorie des sources images
- Modélisation de la réflexion sur un milieu stratifié par des sources
Le résultat de la simulation par approximation de l'intégrale de Sommerfeld est présenté sur la figure 2.9 (courbe bleue). La méthode source d’image est basée sur l’approximation de l’intégrale de Sommerfeld par l’équation (2.22).
Inversion géoacoustique par les sources images
Stratégie d’inversion
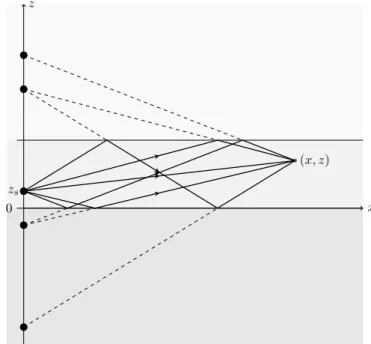
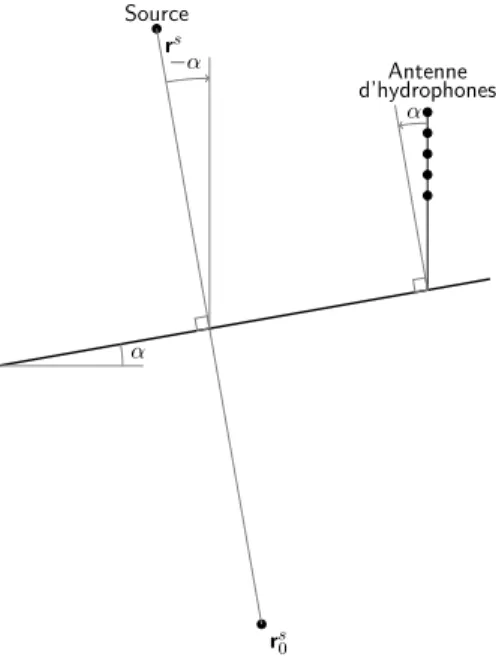
Avec cette approche, les images seront vues par l'antenne légèrement décalée par rapport à l'axe vertical de la véritable source et placée à des profondeurs incorrectes (Figure 3.5). Les coordonnées de l'image correspondant au reflet sur le fond de l'eau sont donc connues et correctes. Ensuite, nous calculons les paramètres de la strate 1 en utilisant l'image des coordonnées1 et ainsi de suite.
Détermination du profil de célérité
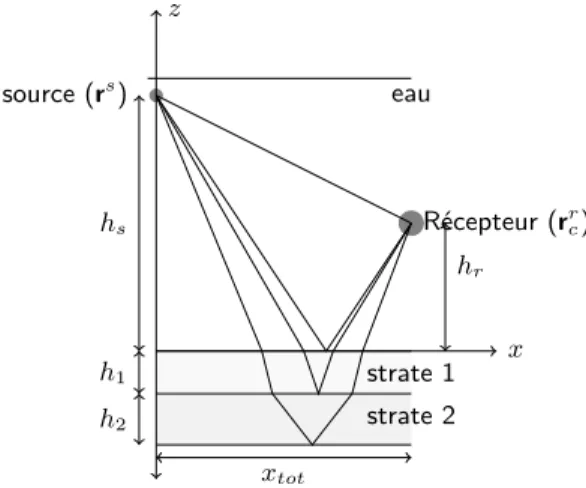
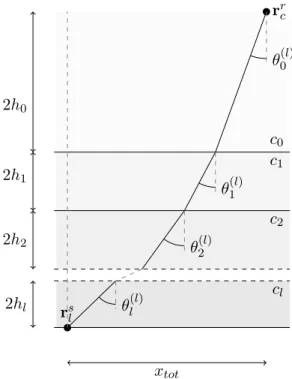
Le principe de la méthode source d'images est d'utiliser ces grandeurs mesurées pour estimer l'épaisseur et la vitesse des couches. Pour dériver les paramètres du stratel, on calcule d'abord les angles d'incidence dans les couches connues. On obtient ainsi les expressions (3.5) et (3.7) de la vitesse et de l'épaisseur de la couche l en fonction de l'incidence θ0(l), du temps de vol t(l)tot, de la vitesse en l eau c0 et la distance horizontale xtot.
Conclusion
Description
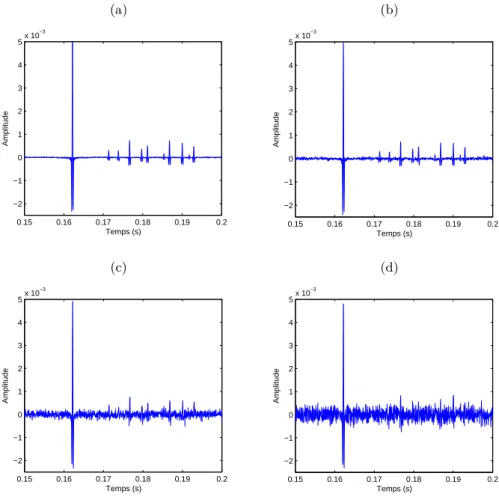
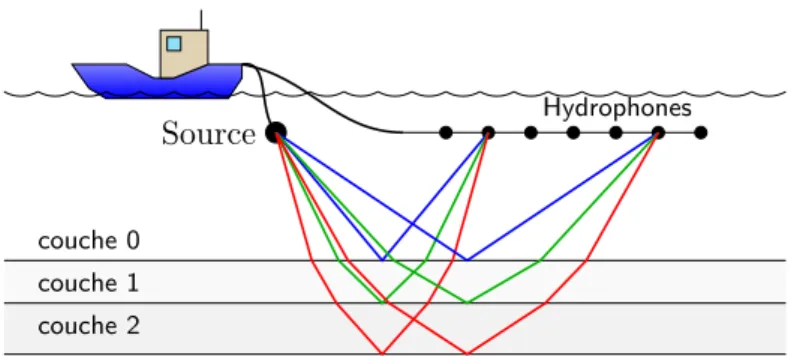
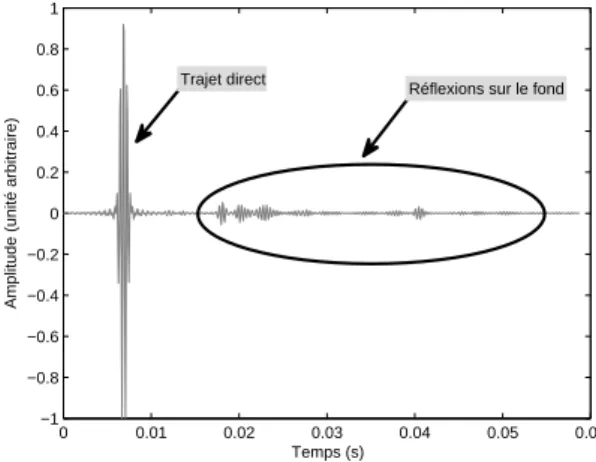
La distance entre la source et l'antenne est de 200 m, ce qui permet à l'angle d'incidence du signal réfléchi depuis le fond d'être d'environ 45˚ du point de vue du centre de l'antenne. Un signal temporel constitué d'une onde réfléchie et d'une onde directe entre la source et le récepteur est enregistré. Le signal horaire simulé pour l'hydrophone de la 8ème antenne (Figure 4.4) montre les réflexions des réflexions au niveau des 10 interfaces.
Résolution du système
De multiples réflexions entre interfaces sont présentes dans le signal simulé, mais en raison des faibles contrastes d'impédance, leurs amplitudes sont trop petites pour être détectées ou pour interférer avec les réflexions directes (section 2.4.2).
Détection par traitement d’antenne
- Traitement préliminaire
- Migration des signaux
- Semblance
- Localisation des images
Pour focaliser les signaux sur la verticale de la source, on applique une propagation τn correspondant au temps de parcours de l'onde entre l'hydrophone n et le point de focalisation r⊥(θ). En notant d la distance entre le centre de l'antenne rrc et un point de la carte source de l'image (Figure 4.7), le traitement est appliqué au signal sHn(t) issu de l'hydrophone n égal. Elle est donc tracée selon des lignes incidentes θ passant par le centre de l'antenne.

Résultats
De la même manière, si dans la formation classique des canaux le lobe principal de la directivité de l'antenne a une ouverture angulaire de 60°, cela n'empêche en rien de savoir exactement dans quelle direction on obtient un maximum. La limite de résolution dans la méthode proposée affectera principalement la capacité à distinguer des images très proches correspondant à des couches fines.
Conclusion
- Erreurs de mesures
- Erreurs dues aux hypothèses
- Erreurs dues au bruit
- Erreurs dues au maillage
De plus, la forme et l'heure d'émission du signal de la source sont déterminantes. La synthèse de ces niveaux de bruit en fonction du trafic et de la force du vent [Wen62] est présentée dans la Figure 5.1. La recherche de la position des images est effectuée dans les cartes obtenues par les équations (4.18) et (4.20).
![Figure 5.1 – Composition spectrale du bruit ambiant [JKPS94].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466097.71001/73.892.233.604.165.655/figure-5-1-composition-spectrale-bruit-ambiant-jkps94.webp)
Sensibilité de l’algorithme d’inversion aux erreurs
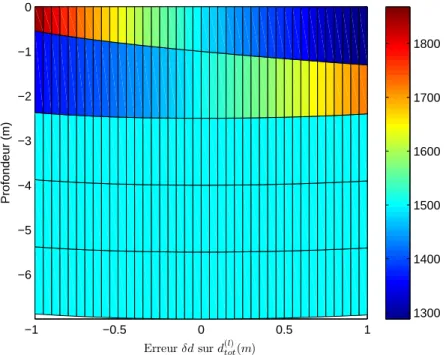
Erreur de localisation en distance
Si la distance d(1)tot est surestimée (δd >0), l'épaisseur de la strate est automatiquement surestimée et l'image se situe derrière la verticale de la source réelle (Figure 5.8a) : la vitesse calculée est donc sous-estimée. La trajectoire de ce rayon dans la strate 2 est donc sous-estimée et nécessite une valeur surestimée de la vitesse dans cette strate pour maintenir la source image rs2 alignée avec la verticale de la source (Figure 5.8a). En rouge : la deuxième interface et les rayons réfractés pour les célérités calculées avec l'erreur de localisation distance de la source imageurs1.
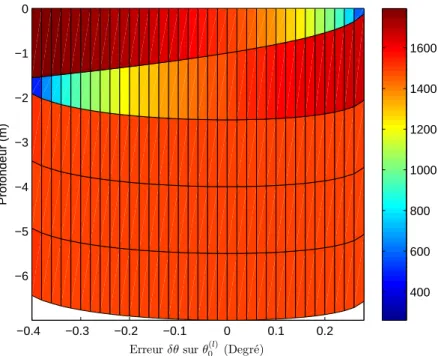
Erreur de localisation en angle d’incidence
Cela signifie que l’erreur doit être faible par rapport au trajet de l’onde dans la strate l pour que l’estimation soit correcte. La position de l'image des coordonnées rs2 est correcte, mais la vitesse et l'épaisseur de la strate 2 sont incorrectes. L'estimation analytique de l'erreur de vitesse par rapport à l'angle d'arrivée est plus compliquée que l'analyse d'une erreur sur les temps d'arrivée.
Conclusion
Description de l’expérience
Les dimensions du bassin utilisé pour l'expérimentation sont de 1 m de largeur, 2 m de longueur et 1 m de hauteur (figure 6.1b). Puis la première impulsion f′(t) (du spectre F′(ω)) correspondant au trajet direct entre la source et l'hydrophone (arrivée 1 sur la figure 6.3a) est isolée manuellement. Avec la géométrie choisie pour l'expérience (figure 6.4), le trajet du fond réfléchi peut être isolé du trajet direct (arrivée 1 sur la figure 6.3a) et de la surface réfléchie (arrivée 5).
Résultats
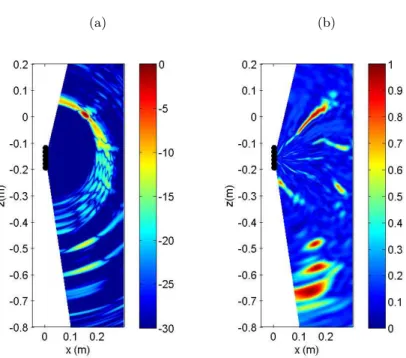
On peut voir les plaques placées sur le fond ainsi que les onduleurs. b) : carte des sources d'images obtenue avec la fonction mock. La courbe pleine est le profil de vitesse obtenu par mesure directe avec un transducteur de 1 MHz.
Discussion
Expérimentation en mer
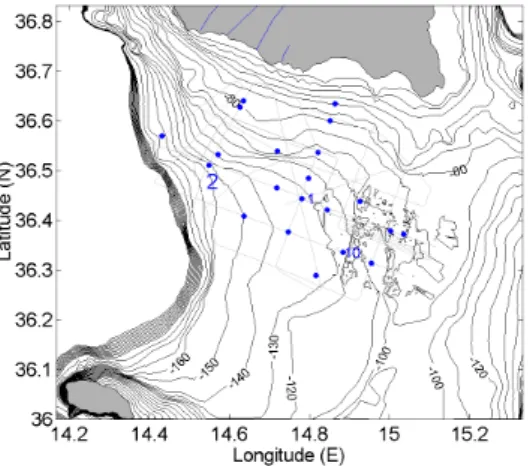
Description des données de la campagne de mesures SCARAB
L’avantage est de bénéficier d’un support feuilleté idéal dont les propriétés sont connues (Figure 6.1a). La configuration choisie est illustrée à la figure 6.4 et une image des plaques et des transducteurs est présentée à la figure 6.5. La majeure partie de l'énergie dans le spectre du signal transmis (Figure 4.2b) est inférieure à 3 kHz (longueur d'onde de 50 cm).

Résultats
La pente de l'antenne est souvent un paramètre inconnu qui peut facilement être déterminé ici avec la méthode de la source d'image. Dans ces premiers mètres, la méthode source d'image produit 3 couches (a à c) dont la profondeur correspond aux couches 1, 3 et 5. Méthode Holland & Osler Méthode source d'image Strate Épaisseur Profondeur Vitesse Strate Épaisseur Profondeur Vitesse.
Description des données de la campagne de mesures CLUTTER’09
En raison du faible coût de calcul de la méthode source d'images, l'utilisation d'une antenne horizontale tractée par un AUV (Autonomous Underwater Vehicle) peut permettre de suivre cette stratégie d'inversions locales répétées sur une longue distance et ainsi caractériser de grandes zones. L'envergure totale de l'antenne est donc de 32,55 m et le premier hydrophone est à 10,38 m de la source. Le volume de données disponible est de 2693 tirs depuis la source, avec un tir transmis environ tous les 5 mètres le long d'une trajectoire rectiligne.
Difficultés rencontrées et solutions proposées
Signal de référence
Cependant, avant d'appliquer un seuil de validité avec apparition d'isolement du signal direct entre la source et l'hydrophone, on filtre l'apparition avec une fenêtre gaussienne pour atténuer ses variations rapides. Enfin, de sb1 on prend la partie du signal dont la ressemblance est supérieure à 0,4 pour estimer le signal de référence f(t). Puisque le signal de référence est estimé, nous utilisons la déconvolution de Wiener décrite dans la section 4.2.1 pour construire un nouveau signal de référence f′(t), qui est une impulsion de phase nulle (centrée sur t = 0 et paire).
Correction de la forme de l’antenne
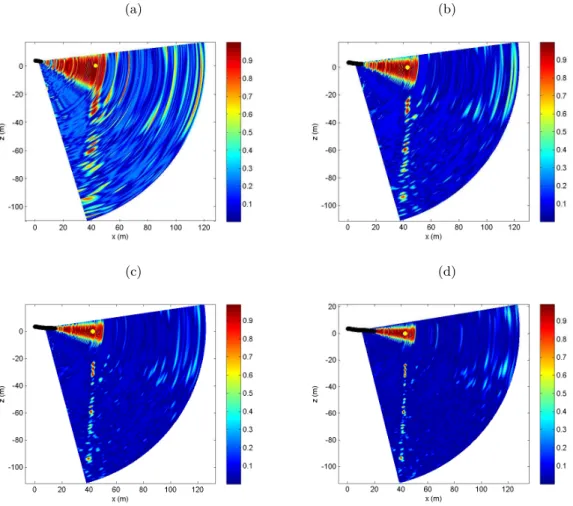
L'étape clé du calcul de la forme de l'antenne consiste à déterminer les distances source/hydrophone ds1 à dsN et les premières distances image/hydrophone dim1 à dimN. La correction de la forme de l'antenne affecte la qualité de la carte source de l'image. Au contraire, avec l'antenne corrigée les sources images apparaissent nettement proches de la verticale de la source entre -24 m et -100 m.
Résultats
Choix du nombre d’hydrophones pour l’inversion
Analyse de la stabilité des résultats
Le point jaune correspond à la position de la source et le point noir aux positions des hydrophones.
Caractérisation dépendante en distance
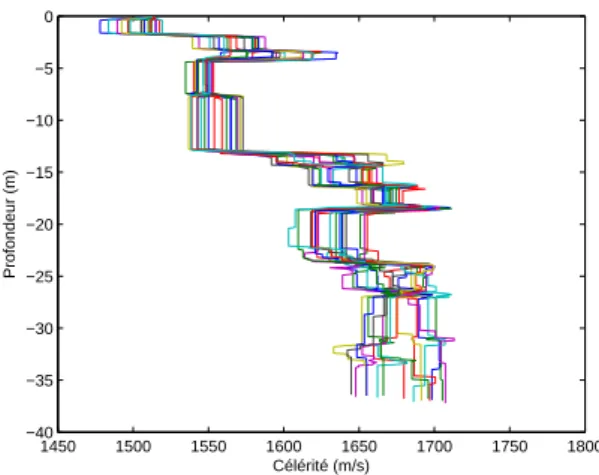
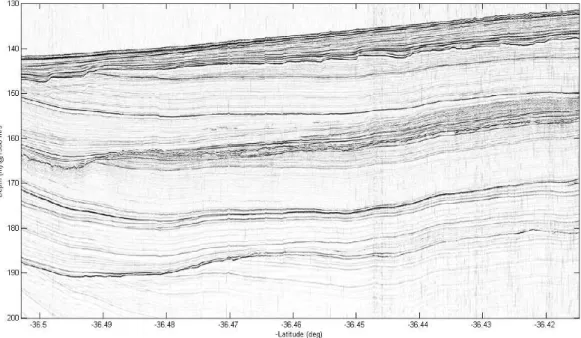
En faisant la moyenne des résultats ¯c(x) obtenus avec différentes sous-antennes (composées des hydrophones 6 à 20, 7 à 21,.. et 18 à 32), on obtient les célérités présentées sur la Figure 7.17. Pour une meilleure lecture du résultat de la Figure 7.17, la Figure 7.19 présente le même avec des repères noirs aux endroits où les interfaces ont été détectées par la sous-antenne constituée des hydrophones 18 à 32. La comparaison avec les données sismiques obtenues lors de la campagne CLUTTER '07 (figure 7.20) permet de constater la similitude entre les couches géologiques trouvées par la méthode source image et celles visibles sur la trace sismique.
Discussion
Le long du trajet ]0;π/2] le nombre d'oscillations dépend de la fonction de Bessel, de l'exponentielle et du coefficient de réflexion. L'utilisation de la méthode d'intégration numérique de Simpson nécessite au moins quatre points par oscillation. Le nombre d'échantillons dans la partie ]0;π/2] du chemin d'intégration doit donc être le plus petit.
Régime impulsionnel
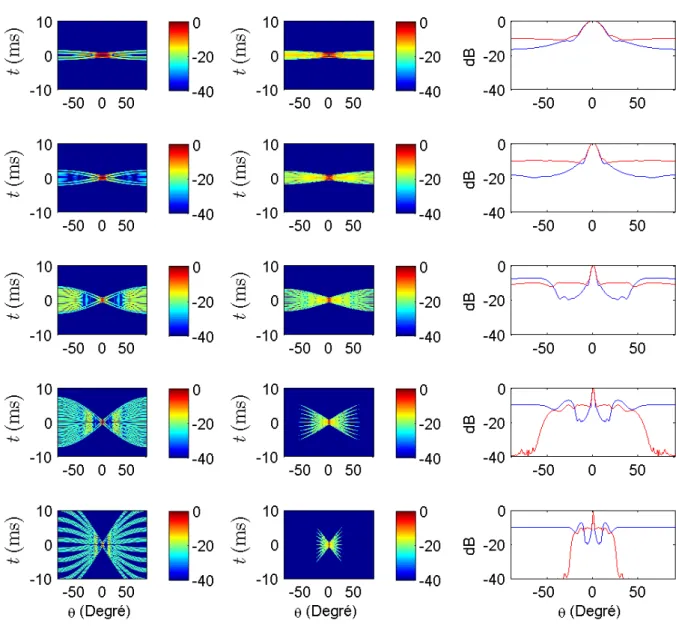
Si le nombre d’éléments N est suffisamment grand, on voit qu’il n’y a pas de différence significative entre IF dV et Ihd dans le lobe principal. En effet, pour une antenne composée de 20 capteurs dont la distance entre les capteurs est ∆ = λ0/4, on voit que le lobe principal de directivité est identique pour chaque fonction, mais en dehors de ce lobe principal la fonction Ihd(θ) est moins efficace (Figure F.1).
Synthèse
Bjorno, éditeurs, Actes de la 3e Conférence internationale sur les mesures acoustiques sous-marines, pages 209-216, Nauplie, Grèce, 2009. Caractérisation quantitative des fonds marins à l'aide de sondeurs de sédiments (1kHz-10kHz) : modélisation directe pour inversion sur données réelles. Caractérisation du fond marin en fonction de la portée par inversion des données acoustiques provenant d'un réseau de récepteurs remorqué. Le Journal de l'Acoustical Society of America.