Dans la théorie de la supervision, le système complet est généralement divisé en deux parties : le processus et le superviseur. La théorie de la surveillance SED proposée par Ramadge & Wonham est d'abord présentée en détail.
Introduction
Une approche logique qui ne s'intéresse qu'à la survenance d'événements ou à l'impossibilité de cette survenance et à l'enchaînement de ces événements, mais pas à la date exacte de ces événements, autrement dit pas aux aspects de mise en œuvre ; Ramadge et Wonham [RAM 89a][WON 94] ont utilisé cette approche pour résoudre le problème de contrôle qui fait l'objet de nos recherches et fait donc essentiellement l'objet de la suite de cette thèse. Une approche quantitative qui aborde l’aspect évaluation des performances voire optimisation de ces performances ; dans ce contexte général, deux autres approches peuvent être distinguées : la première est l'approche d'analyse des perturbations initiée par Y.C.
Modèle logique de systèmes à événements discrets
Langage et automate
- Evénement, chaîne et langage
- Langage
- Langage préfixe-clos
- Automate fini
- Langage généré d’un automate fini
- Langage marqué d’un automate fini
- Opérations sur les automates et les langages
- Composition d’automates
Un automate est une machine à états qui décrit le fonctionnement d’entrée/sortie d’un système à événements discrets. Un automate est représenté par une séquence d'états et de transitions, ces dernières associées à des événements.

Réseaux de Petri
Notions de Base
La modélisation des SED réels est généralement difficile à mettre en œuvre en raison de l'explosion combinatoire du nombre d'états (même dans les petits systèmes) et même si les automates apparaissent comme un formalisme approprié permettant de modéliser efficacement une grande classe de systèmes à événements discrets, certains les applications de production peuvent être plus facilement exprimées sous forme de réseaux de Pétri. Les réseaux de Petri (RP) ont l'avantage, par rapport aux automates, d'être un modèle beaucoup plus général, profitant de structures beaucoup plus riches, et s'adaptant parfaitement à la description de certains types de SED.
Le Marquage de RdP
Lorsque le poids des éléments des matrices Pré, Post est soit nul, soit égal à 1, le réseau est dit sécurisé. A partir de ce marquage il est possible de développer le réseau en suivant certaines règles.
Franchissement d'une transition
Le Grafcet
- Eléments de base
- Interprétation du graphe
- Règles d'évolution
- Extensions du Grafcet
- Validation du Grafcet
Le Grafcet (Step/Transition Command Functional Graph) est un graphe permettant de décrire facilement les fonctionnalités d'un automatisme séquentiel [BLA 79]. Le franchissement d'une transition est effectif lorsque la transition est validée et lorsque la susceptibilité associée est vraie.

Conclusion
La théorie de la supervision SED proposée par Ramadge & Wonham sera d'abord présentée en détail ; c'est l'origine du contrôle par supervision. L'équipe du professeur Wonham à Toronto est à l'origine de la théorie du contrôle par supervision [RAM 83][ [RAM 87a][RAM 87b].
Synthèse de la commande Ramadge & Wonham
- Concept de supervision
- Définition d’un superviseur
- Concept de contrôlabilité et condition d’existence d’un superviseur
- Contrôlabilité
- Conditions d’existence d’un superviseur
- Langage suprême contrôlable
- Synthèse du superviseur
On note Σp(q) la série d’événements qui peuvent être générés par le processus à partir de l’état q. Le langage de spécification L(Sspec) sera alors qualifié de non vérifiable par rapport au langage de processus L(P).

Synthèse de la commande basée sur les réseaux de Petri
Quelques approches sur le contrôle des RdP
Cet ensemble n'est pas directement spécifié, mais est défini en fournissant à certaines transitions des points de contrôle. La condition pour franchir le passage contrôlé T est alors la présence de jetons aux points d'entrée de T et d'un jeton fictif aux points de contrôle. La théorie du contrôle EDS de Krogh et Holloway représentée par RdP exploite le pouvoir expressif de RdP pour modéliser les systèmes.
Synthèse de la commande avec la théorie des régions
- Méthodologie de synthèse de la commande
- Synthèse de la commande avec la théorie des régions
- Conclusion
Ensuite, en utilisant la théorie des régions, des sites de contrôle sont construits pour garantir le comportement souhaité. Dans cette section, nous expliquons comment, sur la base du graphique des marqueurs maximum autorisés et en utilisant la théorie des régions, nous pouvons construire les sites de contrôle à ajouter au modèle initial pour obtenir le comportement requis. Ainsi, pour chaque transition contrôlable conduisant à un état interdit, le système constitué des équations des relations (1), (2) et (3) est résolu pour déterminer un nouveau site de contrôle Pc.

Synthèse de la commande basée sur les invariants de marquage
- Notation et définition
- Description de la méthode
- Problème des transitions incontrôlables
Où W est la matrice d'incidence du RdP de dimension n x m et X est un vecteur à n dimensions appelé P-semi-flux. La matrice WC contient les arcs reliant les emplacements du contrôleur aux transitions du RdP du processus. Par conséquent, pour répondre au cahier des charges, il est nécessaire d'ajouter un point de contrôle Pc où la matrice d'incidence de la partie contrôle est WC.

Objectif de la thèse
Interprétation du modèle RW : dans la théorie de la surveillance, on suppose que le processus génère des événements spontanément. En effet, la procédure de synthèse donne un modèle de supervision qui n'est pas directement utilisable pour la commande. Nous présenterons dans ce chapitre les problèmes liés à l'utilisation de la théorie de Ramadge et Wonham pour la conception de commandes SED ainsi que les différents travaux ayant abordé ces problèmes.
Introduction
Ces différences sémantiques sont suffisamment importantes pour empêcher l'utilisation directe d'un modèle de processus supervisé, par exemple sous la forme d'une machine à états, comme modèle de commande opérationnelle. Ainsi, la conception du contrôle à partir de la théorie de la supervision nécessitera la construction de deux modèles : un modèle du processus supervisé (sous la forme d'une machine à états par exemple) puis un modèle de contrôle opérationnel (utilisant Grafcet ou un langage de programmation API). Les premières approches présentées [BRA 89][CHA 96] proposent ici de modifier la sémantique de l'un des deux modèles construits afin de réduire l'écart sémantique entre eux, et ainsi faciliter le passage de l'un à l'autre.
Différentes approches
- Les événements forcés
- La commande supervisée
- Sûreté de fonctionnement
- Remarques
Le processus étendu est alors un générateur d'événements interagissant avec un superviseur, conformément à la théorie de la supervision (figure 3.3.(a)). Pour respecter la sémantique de la théorie de la supervision, les Grafcets ne gèrent, en entrée et en sortie, que les événements. Ceci a également pour effet de transférer la complexité du contrôle vers la coordination des cartes.

La commande supervisée
- Spécification de commande
- Spécification de supervision
- Obtention d'une machine de Moore des spécifications de supervision
- Synthèse de la commande supervisée
- Procédé étendu sous supervision
A partir du Grafcet de la Figure 3.6.(a), nous pouvons obtenir une machine de Moore avec des spécifications de contrôle. Ainsi, il faudra modifier le Grafcet de la figure 3.5 (en conditionnant les sorties que l'on veut interdire). Dans la figure 3.7.(a), l'action d1 ne peut être exécutée que si la condition associée est vraie, c'est-à-dire I'd1 = 1 (ou de manière équivalente Id1 = 0, ce qui signifie que l'événement d1 n'est pas interdit).

Synthèse du superviseur
Modèle automate du procédé étendu sous supervision
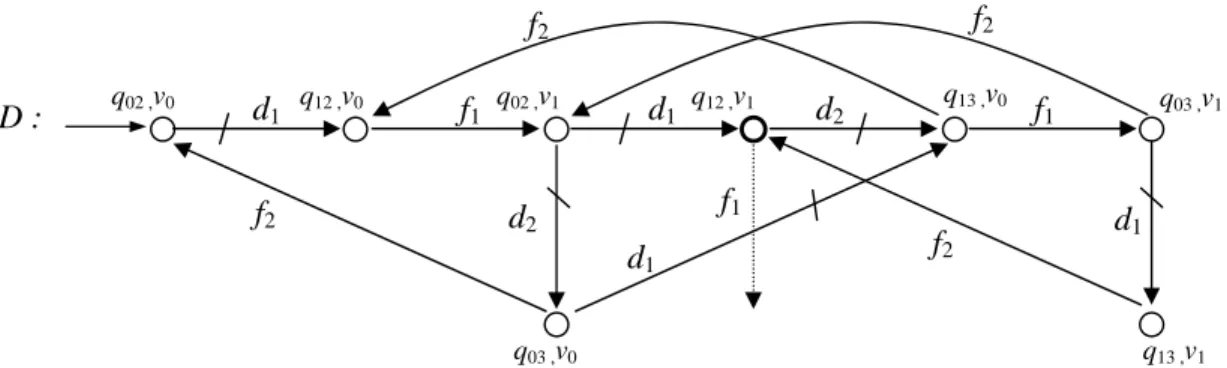
Un modèle global P du processus supervisé étendu peut être obtenu en composant les modèles P1 et P2, ce modèle est représenté sur la Figure 3.13. Notons que chaque événement de ∑' correspond à la simultanéité de l'événement de ∑ éventuellement conditionnelle aux quantités booléennes Id1, Id2 ou leurs compléments, on a la propriété suivante pour les événements de ∑' : chaque événement de ∑' qui le conditionne est contrôlable. . En fait, à partir de l'état (1',11), les événements α', α'' posent problème, les deux événements sont contrôlables car conditionnels mais s'excluent mutuellement.
Modèle automate des spécifications de supervision
Cas où les spécifications ne sont pas contrôlables
Contrôlabilité
Synthétiser un modèle automate D' contrôlable à partir d’Algorithme de
Obtention d’un modèle Grafcet à partir d’un modèle automate de supervision
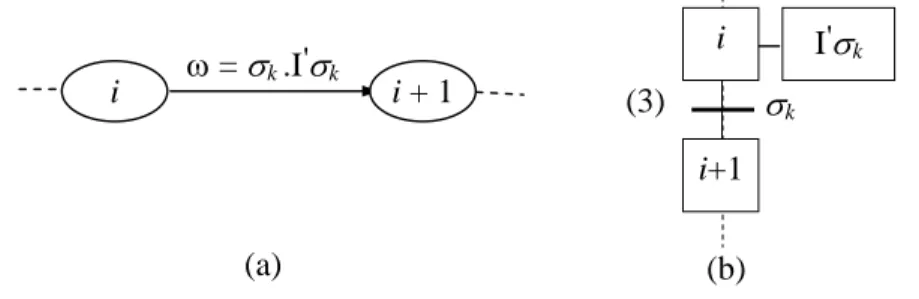
Étape (2) : Pour effectuer la commutation sur l'apparition de ω, il est nécessaire d'appliquer les transformations données sur la Figure 3.22. En appliquant la première étape, on obtient le Grafcet superviseur montré sur la Figure 3.23. Pour prouver cette équivalence, on construit les automates correspondant à chaque Grafcet, on obtient les automates des figures 3.27 et 3.28.
Conclusions et Remarques
Dans le chapitre précédent, nous avons présenté la méthode de synthèse d'un superviseur calculé directement à partir d'un automate contrôlable. Il est donc dommage d’obtenir des modèles de taille considérable à partir de modèles concis du procédé et des spécifications. Cela nous a amené à rechercher une nouvelle approche susceptible de fournir un système de contrôle de taille proche des modèles initiaux.
Introduction
Le comportement souhaité en boucle fermée est obtenu en synchronisant les deux graphiques (étape 1 de la figure 4.1). La construction du graphe d'état à partir du Grafcet synchronisé permettra de construire l'automate du comportement souhaité en boucle fermée (étape 2). Pour pouvoir appliquer l'approche basée sur les invariants, il est nécessaire de définir l'ensemble des contraintes qui donnent l'ensemble des jetons autorisés (étape 4).

Modélisation par le Grafcet
Grafcet du procédé étendu
Grafcet de la spécification
Grafcet du fonctionnement en boucle fermée
- Synchronisation de deux Grafcets
- Grafcet du fonctionnement en boucle fermée
Le modèle Grafcet de fonctionnement en boucle fermée est obtenu en synchronisant le Grafcet du processus GP étendu avec celui de la spécification GS. Le modèle Grafcet représentant le fonctionnement souhaité obtenu en synchronisant GP et GS est appelé modèle quasi-Grafcet de fonctionnement en boucle fermée. Le modèle grafcet du fonctionnement en boucle fermée souhaité constitue la structure de base du contrôleur.

Détermination de l’ensemble des états interdits
Graphe des situations du fonctionnement en boucle fermée
A partir du graphe des situations donnant le fonctionnement en boucle fermée souhaité, la théorie développée par Ramadge et Wonham permet d'obtenir le superviseur le plus permissif. Nous allons maintenant compiler le graphe des situations qui décrivent le fonctionnement possible du modèle quasi-Grafcet où le franchissement de transitions incontrôlables se fait selon la définition 4.7. On remarque que le graphe de situation S′d (figure 4.8) contient plus de transitions que celui Sd (figure 4.7).

Ensemble des états interdits
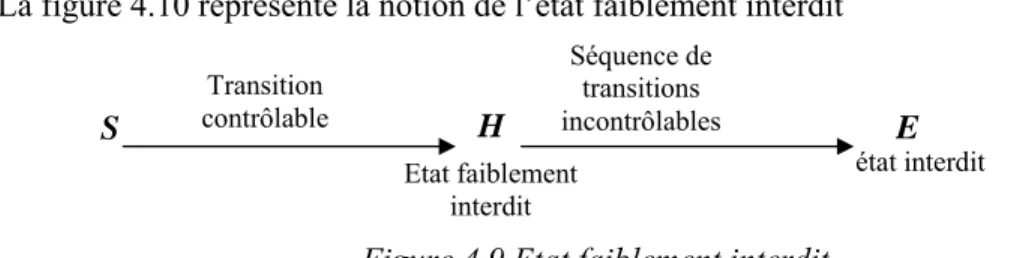
Sd est strictement contenu dans S'd, alors l'ensemble des états et transitions qui sont dans S'd mais pas dans Sd correspondent à des états interdits et à des transitions interdites. L'ensemble des états formé par l'ensemble des états interdits et des états faiblement interdits est appelé l'ensemble des états dangereux et cet ensemble sera noté D. F correspond à l'ensemble des états interdits tels que les événements associés aux arcs arrivant à ces conditions sont tous contrôlables.
Des états interdits aux contraintes linéaires
Il existe une équivalence entre l'ensemble des situations autorisées Sa et l'ensemble de celles définies par la contrainte linéaire. Reprenons l'exemple du système manufacturier et considérons l'ensemble des états interdits donné par la relation (4.1). A ce stade de notre approche, l’ensemble des états interdits est caractérisé bijectivement par un ensemble de contraintes.
Synthèse de superviseur
La démarche de synthèse consiste à compléter cette matrice d'incidence par la partie Wc correspondant aux étages de contrôle. Nous avons vu dans le deuxième chapitre le problème des transitions incontrôlables (c'est le cas de notre exemple), pour lesquelles il faut garantir qu'il n'y a pas d'étapes de contrôle d'entrée. Notez qu'il existe des transitions de sortie incontrôlables associées aux points de contrôle.

Conclusion
Supervisory Control of Discrete Event Systems with Forced Events, MSc Dissertation, University of Toronto, 1989. Krogh, Supervisory Control of Petri Nets, Belgium-French-Netherlands, Summer School on Discrete Event Systems, June 1993. Wonham, Supervisory Control class of discrete event processes, SIAM Journal of Control and Optimization Janvier 1987.