The special advantage of the electromagnetic bearing – the high speed operation and the disadvantage – the unstable behavior is emphasized together with the high load capacity, stiffness and stability of the bushing bearing. The proposed system – bushing bearing electromagnetic actuation unit – combines the stability of the bushing bearing and the high speed operation of the electromagnetic actuation. A vibration theory model of the turbine generator system was used to perform the shaft deformation measurements using perpendicularly fixed eddy current detectors.
On the basis of the measurements, a one-dimensional model was introduced to describe the horizontal vibrations. Based on the agreement between the results of the simulation and the measurement, the model was extended for the case of two-side mounted electromagnetic actuators. The vibration theory model of the actual turbine shaft was introduced and the performance of the electromagnetic actuator was tested and demonstrated by numerical simulation.
The results show that the vibration power can be minimized even in the resonance condition by the appropriate set of control parameters of the magnetic actuator. In this dissertation, I examine the spatial behavior of rotating shafts in small neighborhoods of the resonance frequency.
Bevezetés, el ő zmények
Irodalmi összefoglaló
- Rezgéstani alapok
- Hagyományos lengéscsökkentő módszerek
- Korszerű félaktív lengéscsökkentő módszerek
- Korszerű aktív lengéscsökkentő módszerek
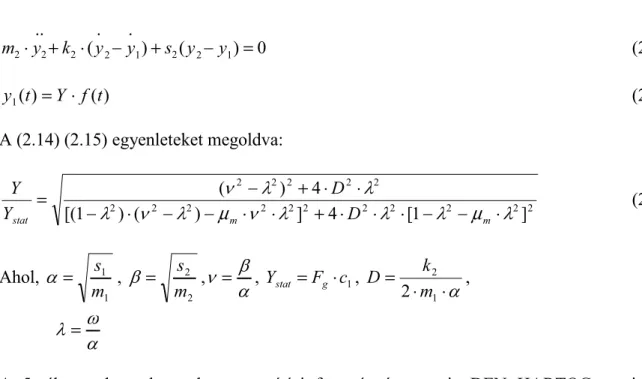
A rezgéscsillapító a rendszer szabadsági fokát 1-ről 2-re növeli, így a rendszer mozgását az alábbi differenciálegyenletrendszer írja le. Az általam kidolgozott módszer csak erőkapcsolós rendszerként működik, így nincs fázisszög különbség az elektromágneses kapcsolat nélküli rendszer és az elektromágneses kapcsolással ellátott rendszer között. Az elektromágneses csapágyak fejlődése a 90-es évektől jelentősen felgyorsult, amit az erre az időszakra felölelő publikációk időbeli eloszlása is bizonyít [33-51].
Az elektromágneses csapágyak alkalmazása elterjedtebb a kisméretű kriogén egységekben és turbinákban, valamint a precíziós megmunkáló gépekben. Ha a valódi forgórész méreteit a geometriai hasonlóság megtartása mellett csökkentjük, akkor nemcsak a méretek, a kritikus fordulatszám és az átlagos csapágynyomás változik, hanem a rezgésállapotot meghatározó jellemzők is. A modell sebességét azzal a feltétellel kell meghatározni, hogy az üzemi fordulatszám és a kritikus fordulatszám aránya változatlan marad.
Az elektromágneses interferenciával kiegészített rezgőmodellt leíró differenciálegyenlet megoldása jelentősen eltér a 2.5-ben leírtaktól, mivel a csatolt dinamikájú nemlineáris tulajdonság lehetetlenné teszi az analitikus megoldást. Mérések és számítógépes mechanikai modell értékelése segítségével meghatározom az elektromágneses rezgések redukáló hatását a forgórendszerű hőgépekben, valamint azokat az optimális paramétereket, amelyek biztosítják a rezgések maximális csökkentését.
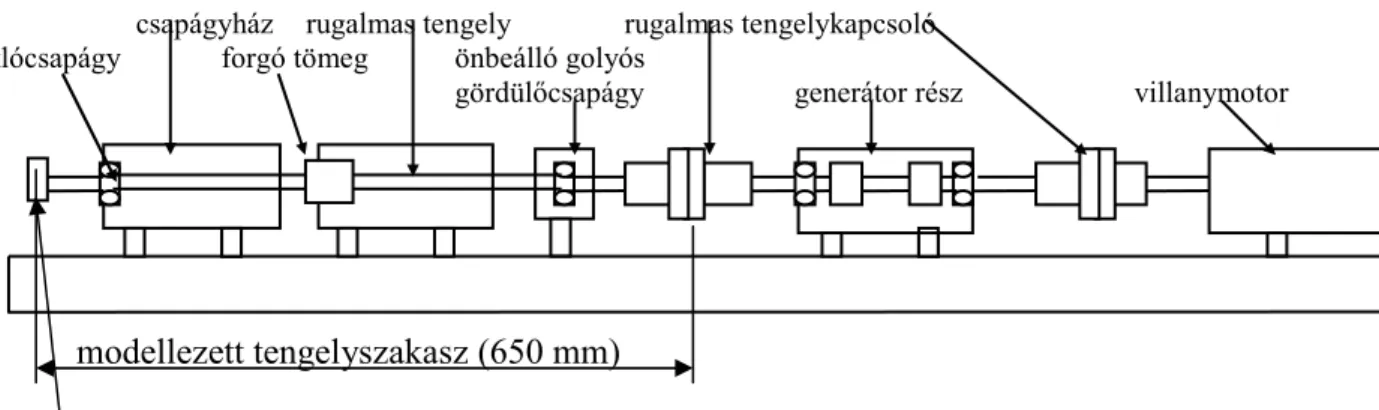
Modellberendezés
- Modellberendezés felépítése
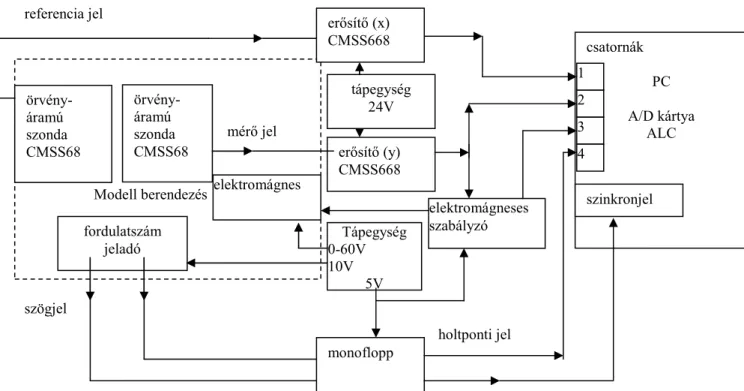
- Modellberendezés műszerezése
- Mérőrendszer kapcsolása
- Mechanikai modell paramétereinek meghatározása
- Elektromágneses beavatkozó vizsgálata
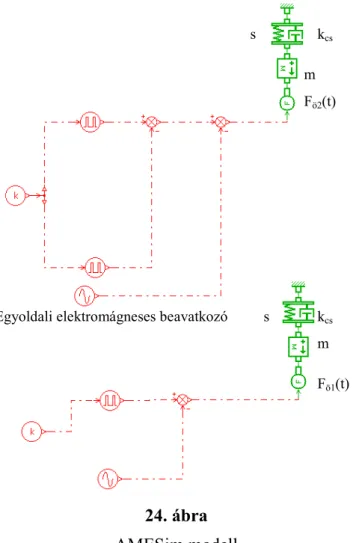
Az elektromágneses tér erősségétől függően az örvényáramok / kis zárt elem áramok / változó áramnak felelnek meg. A tárgy távolsága a mérőszondától meghatározza, hogy az elektromágneses erővonalak milyen mélységig hatolnak be a test felületén. A paraméterek optimalizálásakor a feladatot két részre osztottam, egy- és kétoldali elektromágneses interferencia, mert az elektromágnes tulajdonságaiból adódóan csak a tengelyre ható vonzó erővel tud működni.
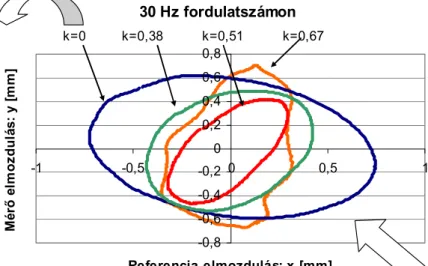
A futtatások során a k értékét egyoldali elektromágneses zavar (k=2τ/T) esetén k=0-ról 0,5-re 0,1-es lépésekben, kétoldali elektromágneses zavar esetén (k=4τ/T) 0,2-es lépésekben k=0-ról 1-re változtattam, a gerjesztési frekvencia as referenciaértéke [A/A Hz]. A fenti tapasztalatok figyelembevételével a rezgéscsökkentés optimális paraméterei egyoldalú elektromágneses interferencia esetén k=0,5 és Fcs/Fg =1,6.
Az elektromágneses beavatkozás karakterisztikája a tengelytávolság függvényében erősen nemlineáris, a rendszernek ezt a karakterisztikáját az AMESim 4.2 verzió nem tudta kezelni, mert a program nem képes negatív rugómerevséget értelmezni. Az elektromágneses interferométert a tengely mentén helyeztem el úgy, hogy az a tengelyrezgések maximális értékéhez legközelebb legyen. Vizsgáltam az elektromágneses interferencia hatását a tengelyre az elektromágneses tengely résméretének és az elektromágneses tengely tápfeszültségének függvényében.
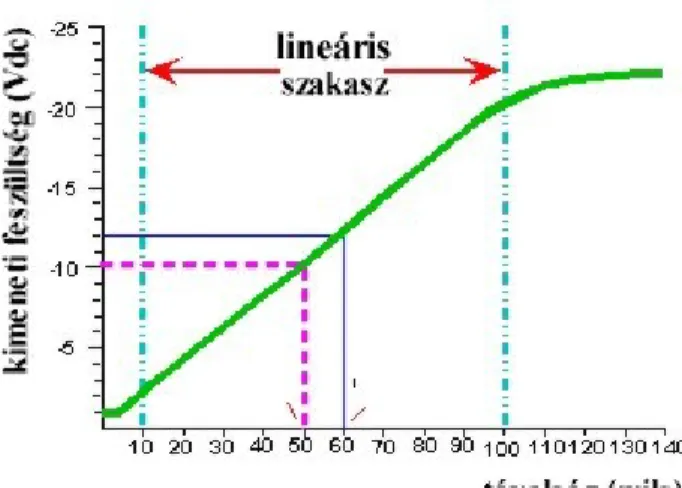
Ha a tengely elmozdulása meghaladja az alapjel értéket (piros vonal a 32. ábrán), az elektromágnes bekapcsol, ha a tengely elmozdulása kisebb, mint az alapjel, akkor kikapcsol. A forgó tengely mentén vízszintesen elhelyezett elmozdulásérzékelő által mért jel a CMSS668 erősítőn keresztül az elektromágneses vezérlő elektronikájába kerül.
Mérési eredmények
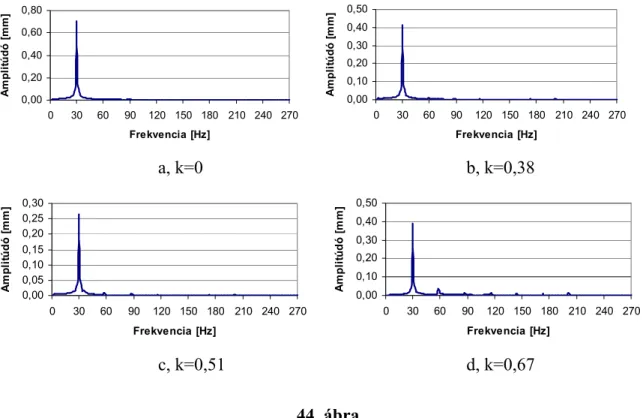
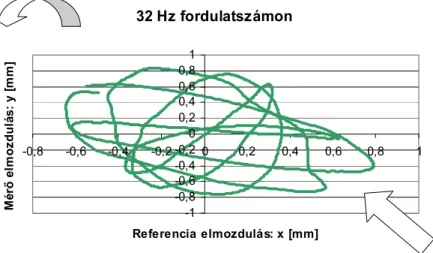
A táblázatból látható, hogy az elektromágnes által felvett teljesítmény k=0,64 kitöltési tényezőnél nagyobb, mint k=0,47-nél, de ez utóbbi esetben kisebb a vízszintes rezgés amplitúdója. A (c) esetben a kitöltési tényező k=0,64 és ennél az értéknél az alapharmonikus enyhén csökken, a harmonikusok jelentősen nőnek. Ha a kitöltési tényezőt 0,5 fölé emeljük, az alapharmonikus rezgésamplitúdó értéke nem csökkent tovább, de a spektrumképen és a Lissajous-görbén egyaránt a harmonikus értékek növekedése figyelhető meg.
Megfigyelhető, hogy k=0,81-nél az alapharmonikus értéke kismértékben csökkent, de a felharmonikusok értéke jelentősen nőtt, mint a 47. Nagy amplitúdójú rezgések esetén az elektromágnes már nem tud kellő erőt kifejteni a tengelyre a tengely és az elektromágnes közötti nagy távolság miatt. A gyakorlati tapasztalatok alapján a 35 Hz feletti optimális rezgéscsökkentés kitöltési tényezője és az elektromágneses feszültség megválasztása nagy szerepet játszik a maximális rezgéscsökkentés elérésében.
Az oszcilláció során az elektromágneses tengely távolsága változik, ezért állandó feszültség mellett a négyzet alakú jel alakja is megváltozik. A szimulációs eredmények megjelenítésekor a vízszintes tengelyen a zavaró elektromágneses tengely alaptávolságát, a függőleges tengelyen pedig az alapharmonikus rezgés amplitúdóját láthatjuk. Látható, hogy az alapharmonikus rezgési amplitúdója alig változik, a felharmonikusok egyre erősebben jelennek meg a spektrumképen, ahogy az elektromágneses tengely alaptávolságát csökkentem.
A rezgések középvonala az elektromágnes irányába mozdul el úgy, hogy amikor a rezgések amplitúdója eléri az elektromágnes és a tengely közötti alaptávolságot, a tengely az elektromágnesnek ütközik. Ha az elektromágneses tengely alaptávolságát a kváziperiódusos kapcsolási pontnál kisebb értékre állítjuk, a rendszer a harmonikus komponensek növelésével reagál állandó elektromágneses tápfeszültség mellett. A törésponthoz jobbról konvergálva nagy értékű a rezgésamplitúdó, balról konvergálva kicsi az alapharmonikus értéke, de sok más frekvenciakomponens is megjelenik a spektrumképen.
A szimulációs teszt kimutatta, hogy az elektromágneses alaptengely adott köztes távolságára és feszültségére van egy alapjeleltolási érték, amelynél az alapharmonikus rezgés amplitúdója csökkenthető káros túlharmonikus komponensek megjelenése nélkül. Elektromágneses gerjesztési feszültség és munkatényező minden egyes gerjesztési frekvenciához, ahol a rezgés alapharmonikus komponensének értéke minimális és a harmonikusok amplitúdója elhanyagolható. Tekintettel arra, hogy az elektromágnes jellemzői csak diszkrétek, az optimális rezgéscsökkentés a beállítási érték (kitöltési tényező) változtatásával biztosítható.
Valós turbinatengely szimuláció
Turbinatengely lengéstani modellje
Turbinatengely szimulációs eredményei
Szimulációs és kísérleti tesztek alapján megállapítottam, hogy az egyoldali elektromágneses interferencia optimális kitöltési tényezője k=0,5 (egyoldali interferencia esetén k =2⋅τ/T ahol T a gerjesztett rezgés periódusa, 2τ a mágnes működési ideje). A téglalap alakú elektromágneses jel kitöltési tényezőjét az optimális értékről (k=0,5) k=1 értékre változtatva a bemeneti teljesítmény növekvő részét a harmonikus rezgési amplitúdók növelésére fordítjuk. 2/b Ha az elektromágneses gerjesztő téglalap alakú jelének kitöltési tényezője az optimális értékről (k=0,5) a k=0 érték felé változik, az alapharmonikus rezgés amplitúdójának értéke nő.
Az adott szerkezet peremfeltételeit figyelembe véve a homogén egyenletrendszernek csak akkor van nem triviális megoldása, ha az együtthatókból képzett determináns értéke nulla. A körszimmetria miatt Θy = Θz , amely a súlyponton átmenő keresztmetszeti tengelyre számított tehetetlenségi nyomaték, míg Θxa a hossztengelyre számított tehetetlenségi nyomaték. Az együtthatókat úgy kapjuk meg, hogy a kapcsolat első n tagját nullának vesszük, így n egyenletet írhatunk fel az n együttható c meghatározására.
LEE CW, YOON YK, JEONG HS: Compensation of tool axis misalignment in the active magnetic bearing spindle system. KIM YB,HWANG WG, KEE CD, et al.: Active vibration control of a suspension system using an electromagnetic damper. Permanent/Electromagnetic Magnetic Bearing Controlled Rotor System, Journal of the Franklin Institute, Volume 334, Issue 3, May 1997, Pages 337-356.
47.CARL R.KNOSPE,R.WINSTON HOPE,STEPHEN J.FEDIGAN AND RONALD D.WILLIAMS: Experiments on Unbalance Response Control Using Magnetic Bearings, Mechatronics, Volume 5, Issue 4, June 1995, Pages 385-400 YIONGHUAN 48-400 CHEN-48. EE: Active control of an asymmetric. ZHOU,SHIYU;SHI,JIANJUN: Active Balancing and Vibration Control of Rotating Machinery: A Survey Shock and Vibration Digest 2001 - Volume 33 - Issue 5 - Page 361.
JANG, MING-JYI; CHEN, CHA'O-KUANG: Bifurkációs elemzés aktív mágneses csapágyazott rugalmas rotorban. VARGA ANDRÁS, Visszanyomásos gőzturbinás méréstechnika és műszaki diagnosztika szakdolgozat, BME Gépek és Energetikai Rendszerek Tanszék, 2005 72.
![16. ábra Mechanikai modell A rugómerevség értéke a számítás alapján s 1 = 61669 [ N / m ]](https://thumb-eu.123doks.com/thumbv2/9dokorg/2497293.294230/29.892.180.795.157.672/ábra-mechanikai-modell-rugómerevség-értéke-számítás-alapján-n.webp)