1 Bevezetés
Modellezés és szimuláció
A második az, hogy az egyszerűsítésnél nem vesszük figyelembe azokat a hatásokat, amelyeket nem fogunk ellenőrizni a szimuláció során. Közvetlenül nem mindig mérhetők, ilyenkor ezek a paraméterek a be- és kimeneti jelek alapján azonosíthatók.
Járműdinamikai modellek
Célkitűzések
Célom egy olyan jármű és abroncs modell kidolgozása, amely alkalmas alacsony sebességű jármű manőverek, például parkolás szimulálására. Ezekkel a modellekkel elemi szimulációkat végzek egyrészt a jármű mozgása és a gumiabroncs deformációja közötti összefüggések megállapítására.
2 A témában eddig elért eredmények
Járműmodellek
A négykerekű járműmodelleket ritkán definiálják, csak a több karosszériás járműmodellek több nyomtávúak, az egytestű járműmodellek nem használnak négy kereket pusztán azért, mert a rendszer kinematikailag túldefiniált, és bonyolultabb a jármű mozgásának relációkkal történő meghatározása A megfelelő.
Kerék- és gumimodellek
Egyrészt leegyszerűsíthető a szabadsági fokok száma, a modellezett függvények és az egyes funkciókat leíró kapcsolatok összetettsége szempontjából. Ha sem az alapnak, sem a keréknek nincs csillapítása, akkor az energia elszívása és visszanyerése ugyanaz.
Gumiabroncs-dinamikai mérések
Az oldalfalra lézer segítségével sugárirányú egyenest vetítenek, amit kamerával rögzítenek. Az oldalfal deformációja miatt a vonal vetített képe is deformálódik, és ez a kamera képéből utólagos jelfeldolgozással pontosan meghatározható.

3 Gumiabroncs- és járműmodellek
- Járműmodellek
- Gumimodellek
- Súrlódás modellezése
- Összefoglalás
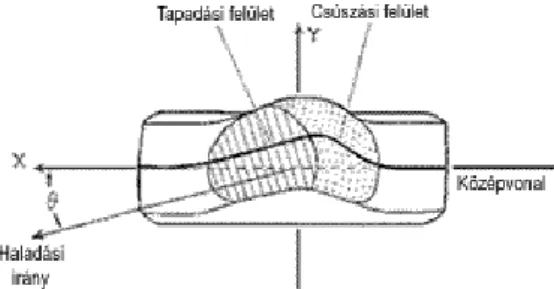
Amikor egy sörte a kötőfelületbe kerül, megtapad, esetleg a talajon csúszik, majd a kötőfelület végére érve ismét szabaddá válik. A térkefés modellhez hasonlóan a gumielemek egyik vége a kerékperemhez van rögzítve, a másik vége pedig szabad, és mivel esetünkben csak a kötőfelületet modellezzük, az a talajhoz tapad.

4 Szimulációs modellek felépítése
- Energiaminimum elvén működő gumimodell
- Kefemodell alapú dinamikai szimulációs modell felépítése
- Többtest dinamikai gumimodellre épülő szimulációs jármű- modell felépítése modell felépítése
- Vezetőmodell
- Összefoglalás
Ugyanígy járunk el a kerékpármodellek esetében is, itt az első kerék egy indexű, a hátsó kerék pedig kettős indexű. Az abroncs kefeelemekkel van modellezve, amelyhez meg kell határozni az egyes gumielemek számát a tapadási felületen belül. Bár a valóságban a keréktárcsa forog, és a gumiabroncs csúcsai rögzítettek maradnak, de mivel a gumiabroncs csúcsai a kerék helyi koordinátarendszerében vannak megadva, az egyes gumielemeket negatív szögben kell elforgatni a felnihez képest ( 4.5 ).
Ennek alapján először meg kell határozni, hogy a kerekek egyes kerekeinek elmozdulása hogyan alakul (4.13), majd a kerekek peremének új helyzetével (4.14) számítható a gumiabroncsok ebből eredő deformációja. Az egyenletben ri j megadja az egyes gumielemekhez tartozó kerék sugarát, ou i j, , és ov i j, , és minden gumielem esetén megadja az egységvektor u és v irányvetületeit a tangens. irány a kerék koordinátarendszerében, ,u v w. A szimulációs megoldásban, pontosabban az egyenletek numerikus megoldásában jelentős különbség van az egyes modellek között.

5 Szimulációs eredmények
Elemi mozgásfüggvények vizsgálata többtest dinamikai model- lel lel
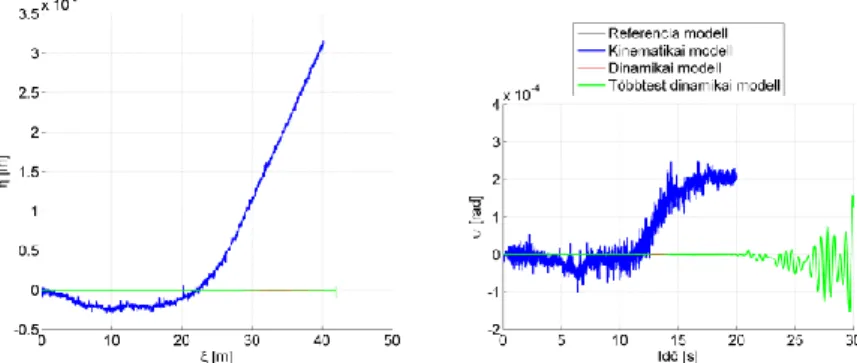
A járműmodellben csak a hátsó kerék volt hajtott és fékezett, az első kereket a manőver során végig vontatták. A gumiabroncs deformációiból adódó hosszanti és keresztirányú erők, valamint az első és hátsó kerekekre ható kormányzási nyomaték az 5.4. Mivel az első kereket kormányozták, kormánynyomaték keletkezik rajta, a hátsó keréken megjelenő jóval kisebb nyomaték csak a karosszéria kis elfordulásának eredménye.
Bár az első kerék kormányzási nyomatéka szinuszos, nincs összhangban a kerekek szögelfordulásával. Az első keréknél keletkező keresztirányú erő viszont jelentős, így az autó karosszériájának oldalirányban nagyobb mértékben kell gyorsulnia. A manőver elején megjelenik egy nagyobb kormánynyomaték az első keréken, ami erős oszcilláló jelleget mutat.
A modellek összehasonlítása
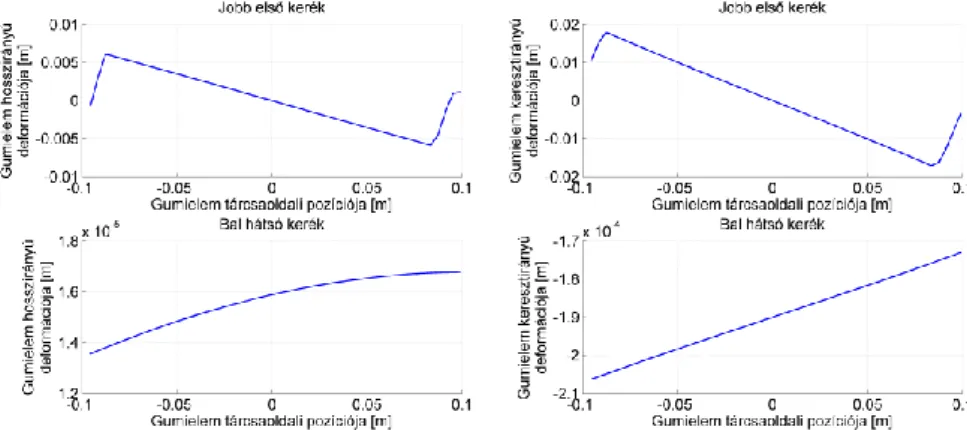
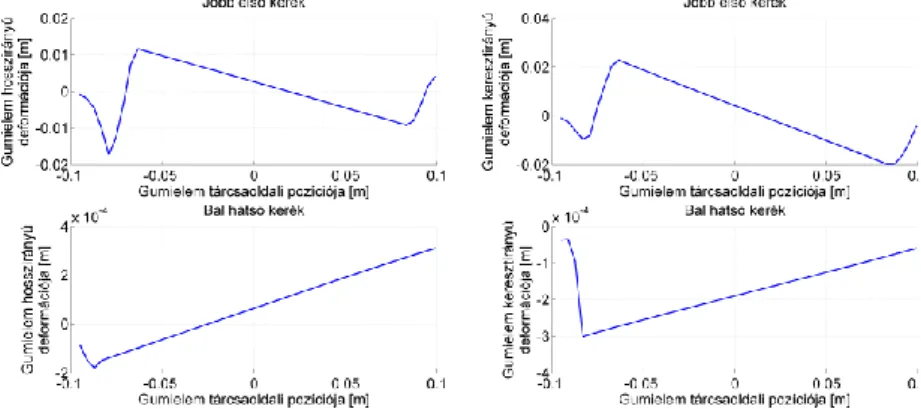
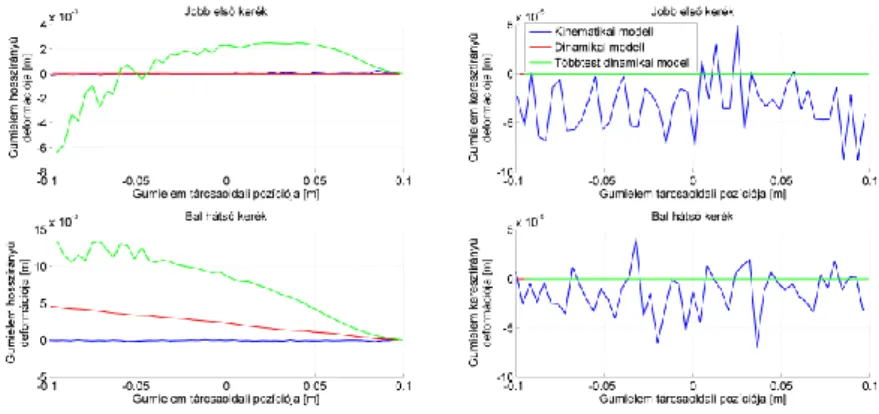
A hátsó keréken a deformáció a többtestű dinamikus modellnél korábban leírtak szerint alakul ki, vagyis a deformáció a bevezető éltől a hátsó élig lineárisan növekszik, majd a hátsó élnél elcsúszik. A deformáció a többtestű dinamikus modellnél szinte csak az első keréken fordul elő, a másik két modellnél közel nulla. Az első kerék deformációi mindhárom abroncsmodellnél azonosak, csak a hosszirányú deformáció különbözik némileg a többtestes dinamikus modellnél.
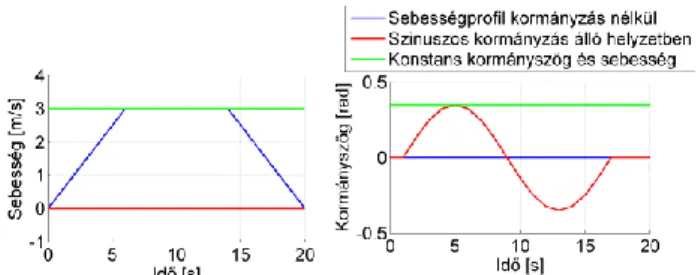
A több karosszériás dinamikus és dinamikus modellek esetében a jármű álló kerékállásból indul ki kezdeti állapotban, vagyis a szimuláció elején a vezetőmodell szabályozza a kívánt kormányszög és sebesség értékeket. Ahogy az várható volt, a többtestű dinamikus szimulációnak van a leghosszabb számításigénye, mivel ebben a modellben a gumiabroncs teljes kerületét modelleztük, nem csak az érintkezési foltra eső részt. Például a több karosszériás dinamikus modell a gumiabroncs teljes kerületét modellezi, míg a másik két modell csak az érintkezési foltot.
Paraméter érzékenységi vizsgálat többtest dinamikai model- lel lel
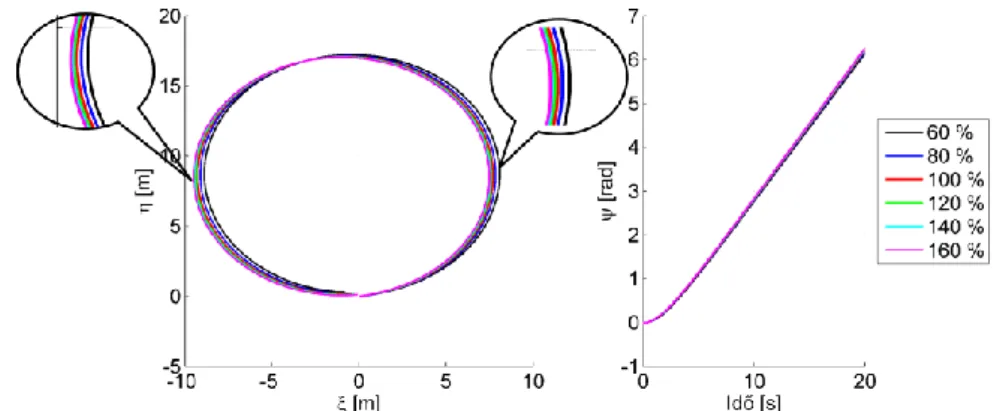
A tapadási felület hosszát alapvetően a kerék terhelése, a gumiban lévő levegő mennyisége (és annak hőmérséklete) és az abroncs oldalfalának merevsége határozza meg. A szimulációk során csak a tapadási felület hosszát változtattuk meg, ami a kerék állandó terhelése mellett a levegő mennyiségének változtatásával lehetséges, de ilyenkor a levegőmennyiség növelésével az abroncs merevsége is nő. A gumielemek szilárdsága változatlan marad, így minél hosszabb az érintkezési folt, annál nagyobb nyomaték szükséges a kerekek megcsúszásig történő kormányzásához.
A kerékre ható eredő erő eloszlik a tapadási felületen, és lényegében ez és a súrlódási tényezők határozzák meg az alakváltozás alakját. Hosszanti és keresztirányú deformáció esetén is látható, hogy minél kisebb a tapadási terület, annál nagyobb lesz a maximális deformáció. Például keresztirányú deformáció esetén hosszabb, 120%-os vagy annál nagyobb érintkezési felületnél egyáltalán nincs csúszás, 100%-os érintkezési hossznál kismértékű csúszás figyelhető meg, de kisebb hosszokon jelentős csúszás. kimutatható.
Kormányzási manőverek elemzése
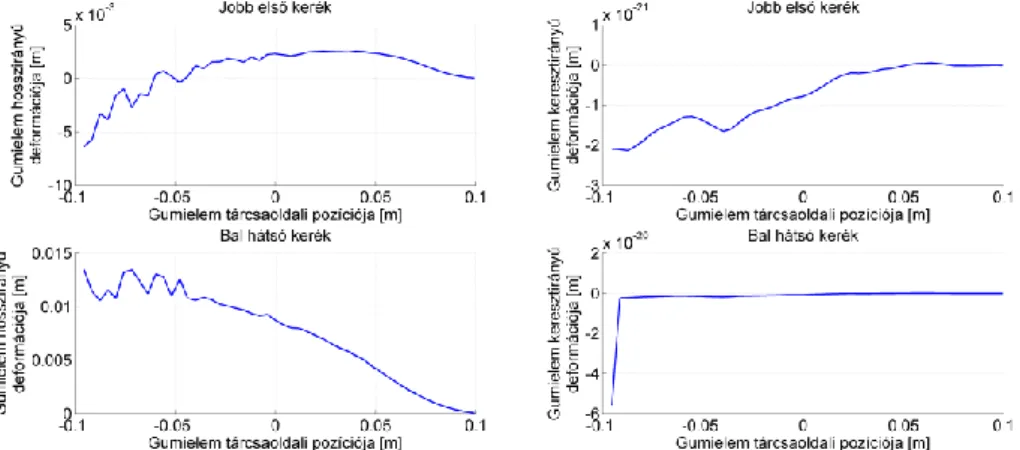
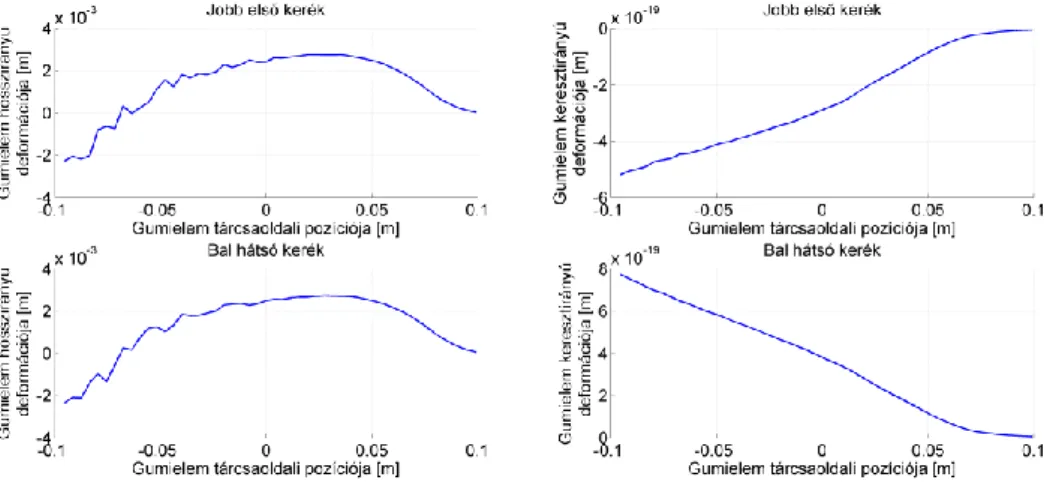
A bal hátsó kerék hosszirányú deformációja jóval nagyobb, mint a többi esetben, mert az alakváltozás a csúszó véghelyzetnek megfelelően alakul. Az első kerekek nem csúsznak, de a jármű forgása miatt jelentős deformáción megy keresztül, mind hosszirányban, mind keresztirányban. Az első szimulációs esetben (kék görbék) az első keréken nincs keresztirányú gumiabroncs deformáció, a másik szimulációs esetben (piros görbék) viszont az állókormányzáskor fellépő deformációs mintát látjuk.
Az indítás pillanatában a hossz- és oldalerő nulla lesz, mint a kezdeti deformáció nélküli szimulációban, de itt a kormányzás miatt mindkét első keréken jelentős nyomaték alakul ki. Az első esetben a deformáció végig nullával egyenlő volt, így az indulás után állandó alakváltozás jön létre. Ezután a kerekek forogni kezdenek, az újonnan belépő gumielemek az első élen a körmozgásnak megfelelő körív alakját veszik fel.

Kormányhiba hatásának vizsgálata
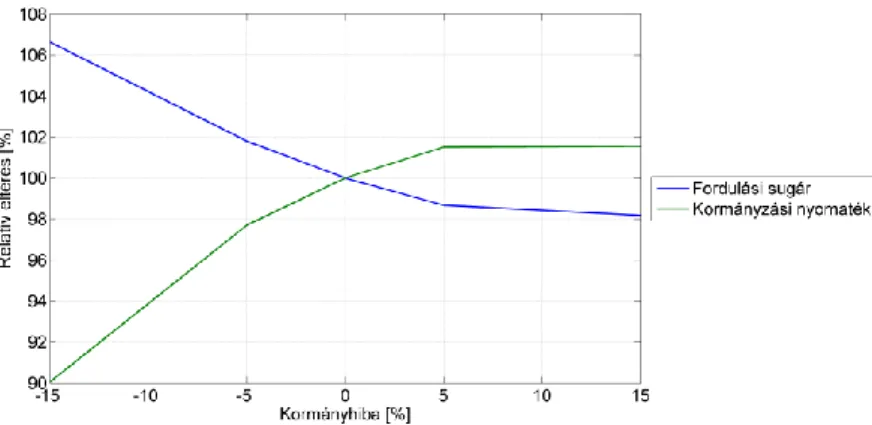
Pozitív kormányhibánál a fordulási sugár csökken, negatív kormányhibánál pedig nő, de a változás nem szimmetrikus, még csak nem is lineáris. Pozitív kormányhibával a jobb első kerék jobban elfordul, mint amennyi az Ackermann-geometria alapján szükséges lenne. Ennek eredményeként a bal első kerék a megfelelő geometria szerint sugározná a járművet, míg a jobb első kerék kevésbé.
Ugyanígy a jobb első, negatív sugarú kerék az ideálisnál nagyobb ívben szeretne kanyarodni, és itt is kialakul egy köztes érték, ami nagyobb lesz, mint az ideális sugár. Hasonlóképpen a jobb oldali kerék a bal első kereket egy kisebb ívbe akarja kényszeríteni, ami pozitív oldalerőt eredményez, amely negatív irányba módosítja az alakváltozást. A jobb első kerék az ideális körnél kisebb, a bal első kereket pedig nagyobb sugarú ívbe kényszeríti.
Összefoglalás
Mivel a jobb oldali kerék nagyobb mértékben kormányzott, a bal kerék kifelé nyomódott, vagyis a jobb kereket egy nagyobb sugarú körbe akarta kényszeríteni. A negatív kormányhiba éppen ellenkezőleg hat (kék és fekete ívek), az első kerekek szétválását eredményezi.
6 Mérési eredmények
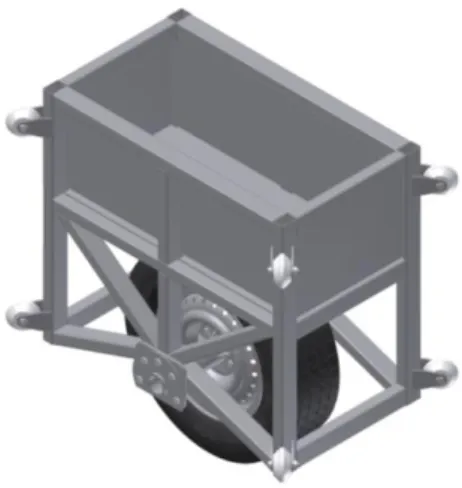
Gumiabroncs paramétereinek meghatározása tesztpadi mé- résekkel résekkel
Összesen nyolc görgőt helyeztek el úgy, hogy minimálisra csökkentsék a két keret közötti hossz- és keresztirányú játékot. A kerékterhelés változása következtében a belső keret függőleges irányban elmozdulhat, függetlenül a hossz- és keresztirányú mozgástól. Minden mérés előtt a kereket a belső kerettel együtt fel kell emelni, hogy a gumiabroncs hossz- és keresztirányú deformációja lazuljon.
A mérésekből kapott különbség a hossz- és keresztirányú alakváltozás során számított tapadási tényezők között túl nagy, kerékterhelésenként közel azonos. A felni csak hosszirányban és keresztirányban tud elmozdulni, ami megakadályozza a kormányzást és a gördülést, mint a próbapadon. A mérés során a hosszanti és keresztirányú mozgási lehetőségek közül egyszerre csak egyet engedtünk meg, a modellben nem szükséges külön egyenletrendszert felépíteni a két esetre.
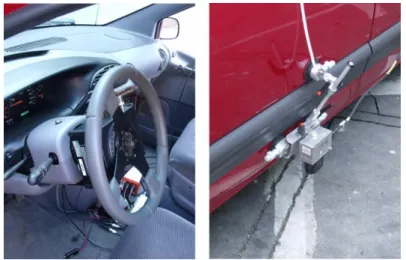
Járműves mérések a modell validálásához
A többtestű dinamikus gumimodellel szerelt járműmodellben a kormányrendszert egyszerű geometriai kényszerként kezelték, vagyis a két első kereket csak az Ackermann-geometria alapján lehetett kormányozni (4.3. fejezet). A kormányrendszer tehetetlenségi nyomatékának meghatározásához összegeztem a három tag tehetetlenségi nyomatékát, a két első kerék tehetetlenségi nyomatékát és a kormányrendszer tehetetlenségi nyomatékát. Az így létrejövő nyomaték mindkét első kerék súrlódását fedi, amiből csak a jobb első kerék nyomatékát kívánjuk meghatározni.
Feltételezve, hogy a két első kerék alatti súrlódási tényező azonos, a kormányra ható nyomaték a kerékterhelések arányában oszlik meg a két első kerék között. A kormánykerék és a jobb első kerék közötti nyomatékváltozás segítségével kiszámíthatjuk a jobb első kerék nyomatékát. Tkorm a kormányon mért nyomaték; Tveszt a kormányon mért nyomatékveszteség; m1 és m2 a jobb és bal első kerék terhelése.
Mérési eredmények összevetése empirikus gumimodellel működő járműdinamikai szimulációval működő járműdinamikai szimulációval
A hossz- és keresztirányú csúszás nem független egymástól, az erők meghatározásakor mindkét csúszást figyelembe kell venni. Legnagyobb szerepe álló helyzetben történő kormányzásnál van, hiszen ebben az esetben az abroncs kormányzás közbeni deformációja által generált nyomatékot adja. A hosszirányú csúszás értéke a szimuláció során végig ingadozik, gyorsításkor és fékezéskor a lengés amplitúdója maximális, i.e. 1 és -1 között.
Megállás után a hátsó kerék elfordulási szöge nulla, az első kerék elfordulási szöge pedig megegyezik a kormányszögével. Mivel indításkor a hosszcsúszás abszolút értéke maximális (pontosabban maximum és minimum között ingadozik), a keresztirányban felvehető maximális oldalerő csökken, i.e. a kerék nem tud oldalerőt átadni, azaz folyamatosan csúszik. Az empirikus modellek fő hibája, hogy a hosszirányú csúszás értékén alapul, ami álló jármű esetén nem értelmezhető, és még kis sebességű járműmozgások esetén is pontatlan értékeket ad.
Összefoglalás
Az empirikus modell másik hiányossága, hogy nem modellezi a gumiabroncs deformációját, az alakváltozás vizsgálatához feltétlenül szükséges egy fizikai elv szerint működő gumiabroncs modell. Ezt követően különféle alacsony sebességű manővereket végeztem, majd ugyanezekre a manőverekre szimulációkat végeztem a járműmodellel. Végül empirikus modellel végeztem szimulációkat tesztjármű mérési manőverekkel, és kimutattam, hogy az empirikus modellek nem alkalmasak kis sebességű járművek mozgásának modellezésére.
7 Összefoglalás
- Tézisek
- Az elért eredmények értékelése
- Kitekintés a téma eredményeinek további kutatására
- Érdekes kerék és gumiabroncs fejlesztések
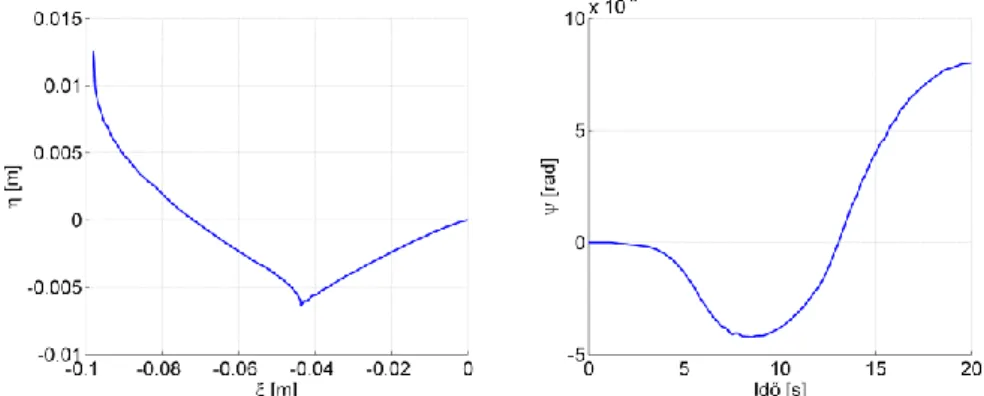
A többtest dinamikus gumimodell segítségével végzett elemi mozgások eredményeként összefüggéseket állapítottam meg a mozgáspálya és a gumi deformációja között (Szabó, 2010), (Szabó, 2012). Első lépésként egy többtestből álló dinamikus gumimodellt építettem, egyrészt tranziens jelenségekkel kell számolni, másrészt a teljes kerületet modellezve a modell az érintkezésen kívüli alakváltozást is kiszámítja. felület. Szimulációval igazoltam, hogy a körkörös manőver során a gumiabroncs kezdeti deformációja miatt a jármű az eredeti esettől eltérő pályán halad kezdeti deformáció nélkül: adott gumiabroncs és járműmodell esetén 20°-os kormányszöggel. , egy negyedik. a 10-nél nagyobb görbe centiméteres abszolút különbséget eredményez.
Mivel a tapadási felület kicsi, ezért sűrű eloszlást kell alkalmaznunk, hogy a tapadási felületen belül is megfelelően tudjuk elemezni az alakváltozást. Összehasonlítottam a három különböző modellt, és megvizsgáltam az abroncsmodell paramétereinek hatását a jármű mozgására és a gumiabroncs deformációjára. Ha a modellben a radiális alakváltozást is számítjuk, akkor a gumiabroncs deformációját közvetetten a kerékterhelés és a gumiabroncs radiális merevsége határozza meg.

8 Irodalomjegyzék
Measurement of the braking force characteristics of tires in relation to the design of the wheel slip control system (anti-lock braking system). Modeling of pneumatic tires by a finite element model for the development of a remote tire friction sensor. An example for camber and wheel force measurements for test bench data generation and validation purposes, Wetzlar: Corrsys Datron.
Die wesentlichen Eigenschaften der Gleit- und Rollenlager - The most important properties of plain and roller bearings. Development of multi-body wheel models for simulating tire deformations during longitudinal and lateral sliding. Dynamic modeling and simulation of log trucks with combined tyre-turning and braking forces.
9 Köszönetnyilvánítás