This thesis deals with the evaluation of the necessary sensor technology for the corporatization of an electric vehicle. The result of this work forms the basis for the further development and realization of the autonomous vehicle.
E INLEITUNG
- Methodik
- Autonomes Fahren
- Entwicklungen
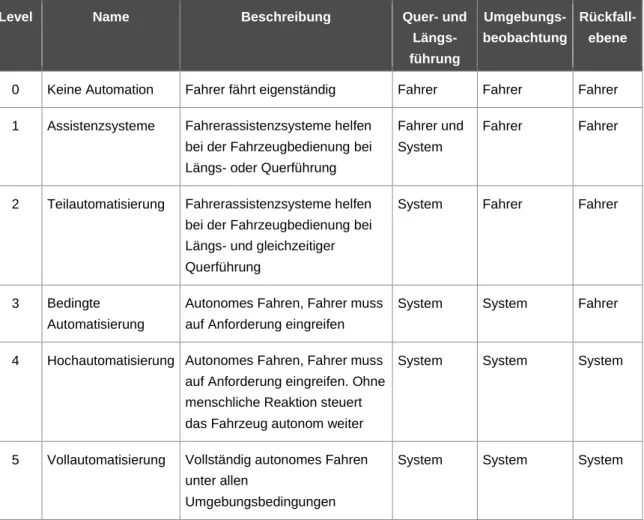
- Autonomielevel
- Gesetzgebung
- Dilemma-Situationen
- Anforderungen an die Sensorik
- Systemanforderungen
- Einbauanforderungen
- Umweltanforderungen
- Gesetzliche Anforderungen und Normen
- Rahmenbedingungen
- Fahrzeug
- Zielgruppe
- Einsatzbereich
- Produktentwicklung
Durch die Kommunikation mit dem entgegenkommenden Fahrzeug kann eine Kollision durch kooperatives Ausweichen vermieden werden (Option 5). Bei der Produktion wird der Einsatz von Stoffen mit Risikopotenzial für die Umwelt durch gesetzliche Vorgaben zunehmend eingeschränkt oder ausgeschlossen.
S TAND DER T ECHNIK
Verfügbare Sensorik
Radarsensoren werden zur Detektion auf kurze, mittlere und große Entfernungen eingesetzt, je nach Öffnungswinkel und Reichweite werden sie zur Erkennung von Fahrzeugen mit unterschiedlichen Geschwindigkeiten eingesetzt. Bei niedrigen Geschwindigkeiten ist einerseits ein großer Öffnungswinkel erforderlich, um einen möglichst großen Erfassungsbereich abzudecken, andererseits ist eine hohe Genauigkeit erforderlich, um Fahrzeuge bis zum Stillstand zu erkennen. .
Ultraschallsensoren
- Funktionsprinzip
- Mechanischer Aufbau
- Objektlokalisierung
- Zuverlässigkeit
- Systeme am Markt
Die Sensoren sind in der Lage, Objekte berührungslos zu erkennen und deren Abstand zum Sensor zu ermitteln. Ultraschallsensoren sind in der Lage, verschiedenste Materialien wie Glas, Holz, Kunststoff oder Metall zu erkennen.
![Abb. 8: Mechanischer Aufbau eines Ultraschallsensors (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/25.892.316.595.605.842/abb-mechanischer-aufbau-ultraschallsensors-quelle-mau.webp)
LIDAR / Lasersensoren
- Funktionsprinzip
- Mechanischer Aufbau
- Objektlokalisierung
- Zuverlässigkeit
- Systeme am Markt
Für ein einzelnes festes Objekt hat die erwartete Impulsantwort die Form einer Gaußschen Kurve, siehe Abb. Da z. B. Nebel aufgrund der Vielzahl von Echoserien aus unterschiedlichen Entfernungen eine sehr umfangreiche Signalantwort liefert (siehe Abb. 16). , kann es leicht von einer Impulsantwort eines festen Objekts (siehe Abb. 15) unterschieden werden.
![Abb. 13: Aufbau eines LIDAR-Abstandssensors (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/30.892.227.706.346.698/abb-aufbau-eines-lidar-abstandssensors-quelle-mau.webp)
Kamerasysteme
- Funktionsprinzip
- Maschinelles Sehen
- Mechanischer Aufbau
- Kameraarchitekturen
- Zuverlässigkeit
- Systeme am Markt
Zur Kommunikation werden hauptsächlich CAN-Bus, FlexRay-Bus und der Ethernet-Standard verwendet (vgl. [MAU15], S. 347-355). Diese Farbfilter, auch CFA (Color Filter Array) genannt, sind je nach Anforderungen an Empfindlichkeit, Schärfe oder Farbtreue unterschiedlich konzipiert (vgl. [MAU15], S. 355-362). Dies wird aufgrund der komplexen Stereofunktionen wie der Berechnung der Disparitätskarte (Unterschiede zwischen linken und rechten Bildern) und der Berechnung des optischen Flusses notwendig.
Zwei CMOS-Sensoren wandeln Helligkeits- und Farbinformationen in elektrische Bildsignale um, die von einem Bordcomputer verarbeitet werden. Diese Kamera hat mehr Einsatzmöglichkeiten als ein Monokamerasystem, Funktionen wie adaptive Geschwindigkeitsregelung (ACC) und Notbremsassistenten sind ohne zusätzliche Radarsensoren, Spurverlassenswarner und Parkassistenzsysteme realisierbar ( vgl. [MAU15], S. 362 -365). Diese Kameras müssen über wasserdichte Gehäuse verfügen, um das Eindringen von Schmutz und Feuchtigkeit zu verhindern (vgl. [MAU15], S. 365–367).
Je nach Anwendung handelt es sich um einfache Monokameras, die lediglich visuelle Inhalte ohne zusätzliche Entfernungsinformationen liefern. Die durch die Eigenbewegung des Fahrzeugs ständig wechselnde Kameraperspektive ermöglicht unterschiedliche Perspektiven auf eine Situation.
![Abb. 24: Aufbau eines Kameramoduls (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/38.892.336.571.267.446/abb-aufbau-eines-kameramoduls-quelle-mau.webp)
Radarsensoren
- Funktionsprinzip
- Mechanischer Aufbau
- Zuverlässigkeit
- Systeme am Markt
Auf der Sendeseite werden Erkennungsinformationen und eine Zeitreferenz in die Sendewellen moduliert. Diese Informationen werden für die empfangsseitige Demodulation benötigt, um zeitliche Zusammenhänge zu ermitteln. Die Bestimmung der Entfernung und Relativgeschwindigkeit von Objekten basiert auf dem Doppler-Effekt und der Zeitverzögerungsmessung.
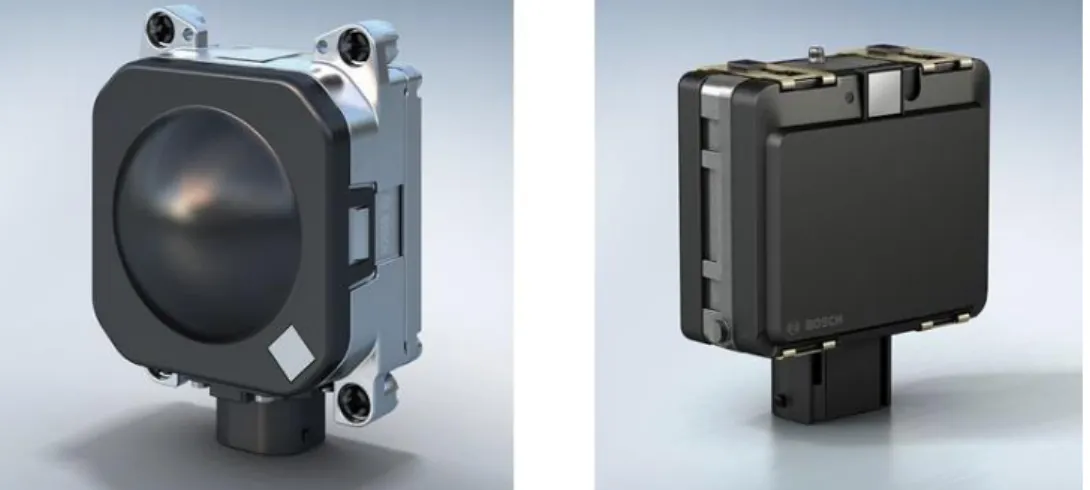
Durch die Überlagerung von Nah- und Fernbereich ist eine verbesserte Fehlererkennung und eine genauere Winkelbestimmung möglich. Einige Radarsensoren bieten neben der Messung von Geschwindigkeit, Entfernung und Winkel auch die Möglichkeit der Höhenmessung mit einer zusätzlichen Elevationsantenne. Gleiches gilt für die Fähigkeit, sehr flache Objekte auf der Straße zu überfahren (vgl. [MAU15], S. 260-291).
Grundsätzlich werden Radarsensoren in drei Bereiche eingeteilt – Nahbereich (ca. 0,2–30 m), Mittelbereich (bis ca. 60 m) und Langbereich (bis ca. 250 m). Ein Fehler in einem anderen Sensor kann zum Überschwingen der Endstufe führen. Diese sind so gestaltet, dass dieser Mangel keine Auswirkung hat oder zumindest als Mangel erkannt wird.
![Abb. 36: Höhenmessung mit zusätzlicher Elevationsantenne (Quelle: [BOS16])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/47.892.227.683.208.450/abb-höhenmessung-zusätzlicher-elevationsantenne-quelle-bos.webp)
Zusätzliche Sensorik
- Raddrehzahlsensoren
- Lenkwinkelsensoren
Eine Änderung des Magnetfelds führt zu einer Änderung des elektrischen Widerstands im Sensor. Diese Informationen werden vom eingebauten IC verarbeitet und in Form von Rechteckimpulsen übertragen. Lenkwinkelsensoren mit einem AMR-Element funktionieren, indem sie den elektrischen Widerstand bei einer Änderung des externen Magnetfelds ändern. Um den gesamten Lenkwinkelbereich bis zu vier Umdrehungen erfassen zu können, enthält der Sensor zwei Zahnräder mit Zahndifferenz (Funktionsprinzip siehe Abb. 49).
Sensoren mit einer auf dem GMR-Effekt basierenden Funktion verfügen über zwei GMR-Elemente, die jeweils die Richtung des Magnetfelds erfassen und daraus den Richtungswinkel berechnen. Sie haben den gleichen mechanischen Aufbau wie ARM-Sensoren, weisen jedoch Vorteile hinsichtlich der Robustheit gegenüber Störeinflüssen auf (vgl. [REI10], S. 140-141).
![Abb. 49: AMR-Lenkwinkelsensor (Quelle: [REI10])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/55.892.224.667.560.929/abb-amr-lenkwinkelsensor-quelle-rei.webp)
G EFORDERTE F UNKTIONSUMFÄNGE DER S ENSORIK
- Use Cases
- Use Case 1: Autonomes Valet-Parken
- Use Case 2: Autonomes Abstellen in einer Garage
- Use Case 3: Autonomes Anfahren einer Ladestation
- Ermittlung der Erfassungsbereiche
- Benötigter Erfassungsbereich Valet-Parken
- Erfassungsbereich beim Parken/Rangieren
- Requirements Engineering
- Requirements Engineering allgemein
- Prinzipielle Vorgehensweise
- Durchführung des Requirements Engineering
- Systemarchitektur
Basierend auf der Herangehensweise an Entwicklungsprozesse im Automobilbereich werden die Anforderungen an die Sensoren zur Fahrzeugunabhängigkeit mithilfe der Anforderungsanalysemethode (Anforderungsanalyse) definiert. Die bei der Anforderungsermittlung gewonnenen Informationen dienen als Grundlage für die Erstellung einer genauen Anforderungsspezifikation. Im nächsten Teil wird das Anforderungsengineering durchgeführt, um die Anforderungen an die Sensoren für die drei in 3.1 definierten Anwendungsfälle gemäß der in 3.3.2 beschriebenen Vorgehensweise zu entwickeln.
Da die Sensoranforderungen im Anwendungsfall 1, dem autonomen Parkservice, am höchsten sind und alle Anforderungen der Anwendungsfälle 2 und 3 enthalten, wird die Anforderungsanalyse nur für diesen Anwendungsfall durchgeführt. Definition des Systemumfangs: Der Systemumfang umfasst Sensoren mit ihren Schnittstellen zur Datenverarbeitung und Schnittstellen zur mechanischen Integration im Fahrzeug. Sensoren müssen die Möglichkeit ihrer Anbindung an Hardware mit geeigneten Schnittstellen und ihrer Auswertung per Software bieten.
Im Folgenden werden bestimmte Anforderungen an Sensoren in funktionale und nichtfunktionale Anforderungen unterteilt. Das Ergebnis zeigt, dass der Großteil der Anforderungen im unteren rechten Teil des Grundanforderungsbereichs angesiedelt ist.
![Abb. 50: Autonomes Valet-Parken (Quelle: [WIN15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/57.892.229.667.392.652/abb-autonomes-valet-parken-quelle-win.webp)
S ENSORIK FÜR DAS E LEKTROFAHRZEUG
Auswahl der Sensorik
- Ultraschallsensoren
- LIDAR / Lasersensoren
- Kamerasysteme
- Radarsensoren
- Gesamtsystem Umfelderfassung
- Zusätzliche Sensorik
Basierend auf dem in 3.2.1 ermittelten Gesamtbremsweg von 58,56 m kann bei der Auswahl der Sensoren die erforderliche Erfassungsreichweite reduziert werden (siehe hervorgehobener Bereich in Abb. 59), sodass nur noch Sensoren mit kurzer und mittlerer Reichweite erforderlich sind. Ultraschallsensoren eignen sich am besten zum präzisen Manövrieren und zur genauen Positionierung des Fahrzeugs beim Einparken. Um die gesamte Fahrzeugumgebung zu erfassen, werden Sensoren an der Front, am Heck und an den Seiten des Fahrzeugs benötigt.
Aufgrund der geringen Fahrzeugbreite kommen vorne und hinten jeweils drei Sensoren zum Einsatz. Als besonders geeignet haben sich hier die USS5-Sensoren von Bosch (siehe Abb. 11) erwiesen, die in zwei Ausführungen mit Erfassungsbereichen von 0,2 – 2,5 m und 0,2 – 4,0 m erhältlich sind, außerdem gibt es zwei unterschiedliche Steckerkonfigurationen. Der Sensor ist weitgehend unempfindlich gegenüber Regen und Schneefall, um Vereisung oder Schneeansammlungen vorzubeugen, ist an der Vorderseite des Sensors eine Heizung verbaut.
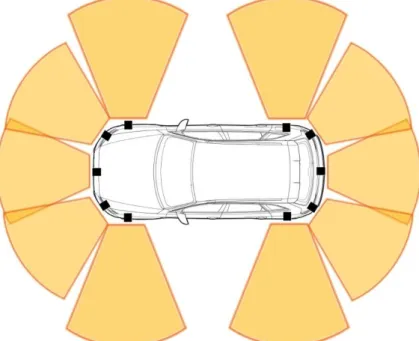
Neben der Erfassung zusätzlicher Objekte dient die Kamera auch der Redundanz im Frontbereich des Fahrzeugs. Um einen Überblick über den gesamten Erfassungsbereich der Fahrzeugsensoren zu erhalten, sind in Abb. die Erfassungsbereiche aller Sensoren zusammen dargestellt.
Anforderungen an die Integration
- Mechanische Anforderungen
- Schnittstellen / Kommunikationssysteme
- Sensorfusion und Sensordatenfusion
Die Befestigung an der Lenksäule muss so erfolgen, dass die Lenksäule durch die Aussparung im Sensor passt und spielfrei mit dem Sensorzahnrad verbunden ist. In der Praxis beträgt die Übertragungsgeschwindigkeit jedoch 500 kbit/s oder weniger, da höhere Übertragungsgeschwindigkeiten zu starken Einschränkungen der Topologie im Fahrzeug führen. Durch die Verknüpfung beider Systeme können Systeme entwickelt werden, die beim Rangieren Schäden am Heck vermeiden.
Die für die Integration erforderliche Kompatibilität wird durch standardisierte Schnittstelleninhalte hinsichtlich der physischen und zeitlichen Darstellung erreicht (vgl. [REI14], S. 52-60). Die Sensorfusion erfolgt im Ultraschallsensor-Steuergerät; Diese Sensorfusion erfolgt im Steuergerät für die Raddrehzahlsensoren, während die Sensordatenfusion für die übrigen Sensoren erfolgt. Die MPC2-Kamera verfügt über eine integrierte Bildverarbeitung, in der die Daten verarbeitet und relevante Objekte identifiziert werden.
Das zentrale Steuergerät wertet die gesendeten Rechteckimpulse, deren Frequenz proportional zur Radgeschwindigkeit ist, aus und berechnet die Geschwindigkeit. Da die Geschwindigkeitssensoren im Steuergerät ausgewertet werden, sind sie direkt mit dem Steuergerät verbunden.
![Abb. 67: Aufbau einer CAN-Nachricht (Quelle: [STR12])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/86.892.141.774.209.326/abb-aufbau-einer-can-nachricht-quelle-str.webp)
A NBINDUNG AN BESTEHENDE A UTOMATISIERUNGSSYSTEME
Geohot-Nachrüstsatz Comma One
Für die Kommunikation zwischen dem Comma One Umbausatz und dem Fahrzeug muss eine OBD-Schnittstelle im Fahrzeug implementiert werden, die die Daten vom zentralen Steuergerät der Sensoren übermittelt. Die Software von Comma One muss angepasst werden, um zusätzliche Funktionen (Valet Parking, steuerbare Ladestation etc.) zu ermöglichen und Daten von zusätzlichen Sensoren (Ultraschall, LIDAR, Heckradar) verarbeiten zu können.
Homezone Parkassistent von Bosch
E RGEBNIS DER A RBEIT
Beim Rangieren beim Einparken werden Ultraschallsensoren an der Front, am Heck und an den Seiten des Fahrzeugs eingesetzt. Im Frontbereich kommen ein LIDAR-Sensor und eine Kamera zum Einsatz, diese Dual-Version bietet die Vorteile einer größeren Erkennungsredundanz zur Erhöhung der Sicherheit und Zuverlässigkeit. Im Heckbereich rechts und links werden Radarsensoren eingesetzt, um entgegenkommende Verkehrsteilnehmer, beispielsweise beim Parken im Freien, zu erkennen.
Die Liste der mechanischen Anforderungen für den Einbau des Sensors im Fahrzeug wird für die spätere Realisierung des autonomen Fahrzeugs verwendet. Neben der Neuentwicklung der Fahrzeugautonomie wurde in dieser Arbeit auch die Möglichkeit der Anbindung an bestehende Automatisierungssysteme betrachtet. Von den beiden in dieser Arbeit untersuchten bestehenden Systemen eignet sich nur das Comma One-System als Basis für das Fahrzeug an der FH Wien.
Als Basis eignet sich der Bosch Homezone Parkassistent weniger, er deckt nicht alle Anwendungsfälle ab und der Hersteller bietet keine Möglichkeit, das System zu erweitern. Die folgenden Sensoren sind für die Umsetzung des entwickelten Systems zur Autonomisierung des Fahrzeugs erforderlich.
A USBLICK
CON17] Continental, industrial sensors, online on the Internet: http://www.conti- online.com/www/industrial_sensors_de_en/ http://www.conti-. VAL17] Valeo, Business Group Comfort and Driver Assistance Systems, online on the Internet: http://www.valeo.com/en/our-activities/comfort-and-driving-. An important distinction is between level 2, where the human driver performs part of the dynamic driving task, and level 3, where the automated driving system performs the entire dynamic driving task.
Exceptions are warning and temporary intervention systems which do not automate any part of the dynamic driving task on a continuous basis and therefore do not change the role of the human driver in performing the dynamic driving task. Request to intervene is notification from the automated driving system to a human driver that he/she must immediately begin or resume the execution of the dynamic driving task. 0 Automationno the full-time performance of the human driver in all aspects of the dynamic driving task, even when enhanced by warning or intervention systems.
4 High driving mode-specific performance automation by an automated driving system of all aspects of the dynamic driving task, even if a human driver does not respond appropriately to a request to intervene. 5 Automation complements the full-time performance by an automated driving system of all aspects of the dynamic driving task in all road and environmental conditions that can be managed by a human driver.
![Abb. 1: Dilemma-Situation (Quelle: [WIN15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/15.892.135.783.200.469/abb-dilemma-situation-quelle-win.webp)
![Abb. 2: ASIL Risikodiagramm (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/17.892.267.642.747.1020/abb-asil-risikodiagramm-quelle-mau.webp)
![Abb. 5: Sensorik zur Umfelderfassung (Quelle: [EET17])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/23.892.126.790.338.632/abb-sensorik-zur-umfelderfassung-quelle-eet.webp)
![Abb. 7: Messprinzip eines Ultraschallsensors (Quelle: [WAY17])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/24.892.144.776.899.1070/abb-messprinzip-eines-ultraschallsensors-quelle-way.webp)
![Abb. 9: Überlappung der Erfassungsbereiche (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/26.892.255.662.648.925/abb-überlappung-der-erfassungsbereiche-quelle-mau.webp)
![Abb. 10: Direktecho (DE) und Kreuzecho (KE) bei unterschiedlichen Objekten (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/27.892.182.706.341.537/abb-direktecho-de-kreuzecho-unterschiedlichen-objekten-quelle-mau.webp)
![Abb. 37: Aufbau eines Mittelbereichsradarsensors von Hella (Quelle: [MAU15])](https://thumb-eu.123doks.com/thumbv2/pubdocorg/274274.42841/47.892.287.625.830.1106/abb-aufbau-mittelbereichsradarsensors-hella-quelle-mau.webp)
