Este trabalho projeta e implementa um protótipo de dispositivo móvel capaz de reproduzir uma imagem utilizando cartuchos de impressora e um microcomputador programável baseado em processadores ARM, conhecido como Raspberry Pi. Como estratégia para definir o escopo do projeto, foram realizadas diversas reuniões entre o grupo para abstrair as restrições que se diluem no processo de impressão em plotter. Ter durabilidade suficiente para suportar as condições em que será entregue durante o processo de impressão; .. h) Vida útil do produto de acordo com as exigências do mercado;
CÂMERA E DISPLAY
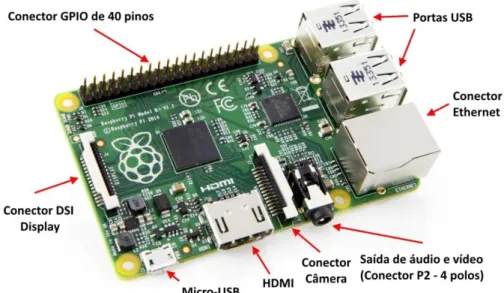
Existem vários fabricantes que oferecem displays compatíveis com Raspberry Pi, mas como precisamos guardar os pinos de saída do Raspberry Pi para comandos de impressão e motores, escolheremos o display que se conecta à saída USB da placa com tela sensível ao toque de 2,8”. , conforme mostrado na Figura 5 [11].
![Figura 4: Câmera da Raspberry Pi Fonte: [10]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/21.892.251.652.223.491/figura-4-câmera-da-raspberry-pi-fonte-10.webp)
IMPRESSORA
Impressão térmica
O primeiro cartucho de tinta inventado tinha 12 bicos e resolução de 96 dpi (pontos por polegada) [16], ou seja, a distância entre cada gota de tinta é de 0,2646 mm. Para impressoras com 12 bicos e 96 dpi, se o caracter a ser reproduzido for maior que 3.175 mm, o cartucho deverá passar uma segunda vez e assim sucessivamente até que o restante da imagem seja impresso. Portanto, os fabricantes de impressoras começaram a desenvolver cartuchos com mais de 12 bicos por polegada. segmento e poderia atingir uma resolução de até 1.200 dpi contendo 10.000 minúsculos bicos de tinta.
![Figura 6: Etapas de disparo de tinta em função do tempo Fonte: [14]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/23.892.135.778.126.365/figura-etapas-de-disparo-tinta-função-tempo-fonte.webp)
HP 51604
Especificações do cartucho
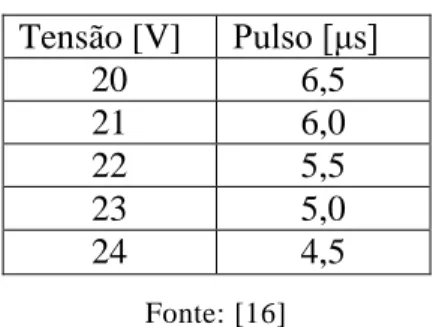
Uma tensão mais baixa tornaria o pulso mais longo e, portanto, o tempo de impressão, por outro lado, uma tensão mais alta poderia atingir pulsos mais curtos, tornando os comandos de disparo da tinta mais rápidos. Por outro lado, as baixas tensões podem não fornecer energia suficiente para que algumas gotas de tinta aqueçam até a temperatura ideal e entrem em ignição imediatamente, causando bloqueio dos bicos e falhas de impressão. A soma dos tempos desses dois processos deve ficar entre 500 μs e 1000 μs, dependendo de como o cartucho de tinta é utilizado [16].
Circuito eletrônico do cartucho
A interface entre o motor e o Raspberry Pi é fornecida por um circuito específico de motor de passo (driver), capaz de gerar os níveis de tensão e comandos de rotação desejados. Usaremos 5V para alimentar o sinal de controle do motor de passo e o Raspberry Pi com seus periféricos, câmera, display e cerca de 24V para aquecer a tinta do cartucho de impressão. Porém, utilizando um osciloscópio, foi comprovado que a biblioteca proprietária do Raspberry Pi que acessa o barramento GPIO é incapaz de gerar pulsos com tempos inferiores a 1 ms.
Como cada linha de instruções do Raspberry Pi leva muito mais tempo do que esse tempo, esta especificação pode ser omitida na parte de programação. Esses recursos são muito desejáveis, principalmente porque utilizam os 5V do circuito que alimentará o Raspberry Pi. Depois de especificar os requisitos do parafuso, foi selecionado um parafuso de 1/8” com porcas autotravantes do comprimento necessário.
Os cartuchos desta família requerem um cabeçote que estabeleça comunicação entre o Raspberry Pi e o cartucho, mas o cabeçote HP 51604 já foi descontinuado e não está disponível comercialmente. O conector HP Q2347 (Figura 47) conecta os contatos HP C6602 a um cabo plano flexível e requer um conector para se comunicar com o circuito proveniente do Raspberry Pi. Basicamente, o Raspberry Pi tem consumo avaliado pelo fabricante de 5V e 700mA, o conjunto de motor e driver de 5V e até 500mA, e o circuito do cartucho consome micropulsos de 350mA a 24V.
Projetamos a placa de circuito com a configuração básica do conversor abaixador de 5V ou conversor Buck IC, conforme representado na Figura 50, e incluímos a distribuição do sinal de saída para o Raspberry Pi e os acionamentos do motor. O Raspberry Pi é capaz de entregar, o que pode levar ao mau funcionamento do circuito, bem como possível falha de componentes da placa. Além disso, a conexão entre este circuito e o Raspberry Pi pode ser feita facilmente através de cabos fêmea-fêmea.
Seguindo os passos sugeridos pelo fabricante da câmera (Robopeak), precisamos instalar um “sistema de imagem pré-construído” no cartão de memória Raspberry Pi. Neste método, os comandos serão executados no próprio Raspberry Pi para instalação do display, ou seja, não será necessário instalar um “sistema de display pré-construído” no cartão de memória.
![Figura 15: Circuito da impressora para controle do bico #1 Fonte: [16]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/31.892.219.675.427.718/figura-15-circuito-impressora-para-controle-bico-fonte.webp)
MOTOR ELÉTRICO
ALIMENTAÇÃO
Para isso escolhemos como fonte primária uma fonte de notebook DELL que gera 19,3V com 3,34A, a partir deste ponto podemos garantir os 5V com circuitos conversores de tensão comumente usados LM2575, diodos, capacitores e indutores [22]. Para chegar a 24V a partir de 19,3V, escolhemos um regulador de tensão DC-DC STEP-UP 5V-35V XL6009E1, que é ajustável [23], o que torna nossa aplicação simples, já que serão necessários cerca de 350mA neste ponto. , podemos fornecer a demanda atual.
RODAS DO ROBÔ
PROCESSAMENTO DE IMAGEM
Algoritmo de detecção de borda
Python Image Library
Efeito da resolução
Quando a imagem foi transformada para binária, ela deixou de ser representada por pixels na tela do monitor e passou a ter seus “pixels” representados por 0s e 1s. Isto terá um impacto visível no tamanho da imagem, como podemos ver na Figura 22. Assim, o número de pixels de cada imagem será o mesmo, e quando transformados para binários, terão sempre o mesmo tamanho.
O tamanho de um “pixel” (gota de tinta) no cartucho também é diferente, tamanho que deve estar entre o tamanho do pixel do monitor e o pixel da imagem binária. Isso significa que a resolução que devemos definir não é arbitrária, ou seja, a resolução fixa deve ser aquela que preenche o tamanho da folha de papel selecionada.
COMANDOS PARA O CARTUCHO
Transformação para formato de impressão
Geração de pulsos
ESTRUTURA ROBÓTICA
- Rodas Omnidirecionais
- Eixos
- Engrenagens
- Montagem dos motores
- Montagem dos eixos
- Montagem da estrutura
Para acoplar as rodas, os eixos escolhidos foram os quadrados de 3,15 mm de material não informado pelo fabricante. Para conectar o eixo do motor ao eixo quadrado, duas peças cilíndricas de aço de 8 mm tiveram que ser usinadas por EDM. O motor selecionado possui duas abas que servem para fixar o motor à estrutura através da passagem de parafusos de fixação que impedem a rotação da carcaça do motor.
A aba do motor tem 4,2 mm de diâmetro, portanto, o parafuso escolhido deve ter rosca M4 ou menos. Além disso, o motor estará a aproximadamente 20mm de distância da carcaça, a parede da carcaça tem 5mm de espessura e a porca aproximadamente 3mm de largura, portanto o parafuso deve ter no mínimo 28mm de comprimento, 10mm de comprimento deve haver perfil rosqueado. . Portanto, também foram confeccionados pequenos cilindros com diâmetro de 6 mm com furos quadrados para o eixo por eletroerosão (Figura 32).
Portanto, o eixo desta lateral necessita de um segundo suporte fixado na lateral por meio de parafusos M5 e espaçados por cilindros ocos de alumínio. Esta tampa tem a função de fixar o eixo do motor junto com as outras quatro faces por meio de parafusos M3, garantindo assim uma união robusta do conjunto estrutural. O eixo do motor é conectado a outro eixo contendo uma engrenagem cônica que, conforme visto na configuração do eixo (Figura 23), aciona o eixo das outras duas rodas.
Para completar a estrutura, são introduzidas rodas radiais em cada eixo e travadas sob pressão com um anel de elastômero de 2 mm de diâmetro, conforme mostram as Figuras 44 e 45.

HP C6602
Este conector é conhecido como conector FFC (cabo plano flexível) e vem em uma variedade de tamanhos e números de pinos. Como o conector FFC 16 (Figura 48) vem com um cabo flat de 16 pinos, o conector FFC selecionado possui a anatomia mostrada na figura abaixo.
CIRCUITO ELETRÔNICO
Alimentação
A face dos trilhos na camada de cobre e a PCB com os componentes soldados podem ser vistas nas Figuras 54 e 55. Após instruir o robô a imprimir a imagem inteira, verificamos se o algoritmo utilizado para transformar a imagem para o formato de impressão era correto. Quando iniciamos nosso projeto, tínhamos em mente projetar um robô que capturasse uma imagem e depois a processasse para prepará-la para impressão.
Nos testes durante o projeto, descobrimos que a câmera não produzia uma imagem que o robô projetado pudesse imprimir, pois a resolução da imagem capturada pela câmera degradava sua impressão. Ao contrário do som que varia no tempo, uma imagem digital pode ser descrita como informação que varia espacialmente. Esses padrões, conhecidos como pixels, quando colocados próximos o suficiente, formam uma imagem contínua quando vistos pelo olho humano [31].
Desta forma, podemos entender uma imagem como uma matriz bidimensional com seus elementos representados por números que armazenam o índice de uma cor. Portanto, uma imagem em tons de cinza terá seus valores numéricos variando nesta faixa, sendo que 0 representa o preto, 255 o branco e qualquer valor entre um tom de cinza. A partir de uma imagem em tons de cinza é bastante simples convertê-la para binária, bastando converter os valores originais para 0 ou 1.
Se analisarmos os valores de intensidade de uma imagem e encontrarmos os pontos onde a derivada é ponto máximo, encontraremos as arestas.

Circuito Impresso
Driver do motor
DESEMPENHO DA IMPRESSÃO
Como o cartucho escolhido possui n = 12 e dpi = 96, o número de passadas que o cartucho precisa para completar a impressão depende unicamente da altura da impressão. Por fim, uma das métricas para quantificar o desempenho da impressão é o tempo gasto nela. A Figura 60 mostra detalhadamente como o cartucho imprime uma imagem, enquanto a Figura 61 mostra uma comparação entre a imagem original e o resultado obtido.
PROBLEMAS ENCONTRADOS
Quando realizamos esta segunda tentativa, obtivemos sucesso na operação do display, mas notamos que para operar o display por este método, todos os GPIOs disponíveis foram redirecionados para a porta USB para que o display funcionasse. Portanto, este método foi descartado porque um número razoavelmente alto de GPIOs é necessário para o funcionamento do robô. Provamos também que é possível controlar um cartucho de impressora com Raspberry Pi, o que ao longo do projeto foi considerado o nosso maior desafio, já que nos comprometemos a utilizar a filosofia da arquitetura aberta, ou seja, todos os componentes do projeto foram escolhidos e montados explicitamente pelo próprio grupo.
Mesmo sem uma precisão satisfatória para aplicar no mercado, obtivemos sucesso com o resultado em relação à proposta, pois todos os pontos citados no início foram alcançados.
ESCALA DE CINZA
ESCALA RGB
ESCALA BINÁRIA
OPERADORES DE DERIVADAS
MÁSCARAS DOS ALGORITMOS
Esses valores da máscara de resposta serão comparados a um limite para determinar quais pixels serão considerados bordas. A soma de todos os pixels (na matriz de 𝑚𝑖 ∙ 𝑝𝑖) dá um valor igual a 16 que é maior que o valor limite de 10. O valor central é então considerado um ponto de descontinuidade, ou seja, um pixel de borda
Se o tamanho calculado for maior que o menor valor de entrada (limiar), o pixel é considerado uma aresta. É importante ressaltar que as respostas obtidas por este algoritmo são muito sensíveis ao ruído da imagem. Como as máscaras são 3x3 em vez de 2x2, Sobel é menos sensível ao ruído que Roberts e os resultados são mais precisos.
ALGORITMO DE ROBERTS
ALGORITMO DE SOBEL
![Figura 12: Circuito equivalente do HP 51604 Fonte: [16]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/27.892.257.676.126.390/figura-12-circuito-equivalente-do-hp-fonte-16.webp)
![Figura 13: Desalinhamento da impressão em função da velocidade do cartucho Fonte: [16]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/29.892.277.635.521.794/figura-13-desalinhamento-impressão-função-velocidade-cartucho-fonte.webp)
![Figura 17: Circuito da impressora para controle dos 12 bicos Fonte: [16]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19574076.0/32.892.239.672.600.1078/figura-circuito-impressora-para-controle-dos-bicos-fonte.webp)




